1
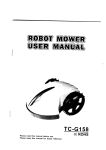
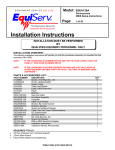
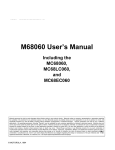
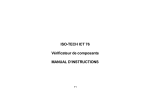
G-Cat: A glove based user interface Ayesha Mudassir [09007014] [email protected] Kedar Tatwawadi [09D07022] [email protected] Supervisor: Dipankar Sarkar April 17, 2013 Abstract We plan to have a glove based user-interface similar to the conventional mouse and keyboard interface. The project would be useful to people with paralytic disabilities, who can move only some parts of their limbs. The G-Cat might not be suitable for heavy typing work. But, it is suitable for day-to-day jobs such as web browsing, accounting etc. which make intermittent use of mouse and keypad. As the project has intuitive appeal ( hand movements corresponding to mouse movements, or corresponding to arrow keys) , it would be in general fun to use . The major electronic components involve Resistive touchpad, accelerometer reed contact switches etc. 1 Contents 1 Introduction 1.1 Basic Functioning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.2 Layout Diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.3 Improvemets over past projects . . . . . . . . . . . . . . . . . . . . . . . 3 3 3 4 2 Problem statement 2.1 Basic Functionality Requirements . . . . . . . . . . . . . . . . . . . . . . 4 4 3 Design approach 3.1 Design Approach . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 5 4 Design of circuit 5 5 Circuit diagrams, algorithmic flow diagram, board 5.1 Algorithmic Flow diagram . . . . . . . . . . . . . . 5.2 Hardware Design . . . . . . . . . . . . . . . . . . . 5.3 Schematic Diagram . . . . . . . . . . . . . . . . . . 5.4 PCB layout . . . . . . . . . . . . . . . . . . . . . . schematic diagrams . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 Test procedures 6.1 Test applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6.2 Testing/Debugging methods . . . . . . . . . . . . . . . . . . . . . . . . . 6 6 7 7 8 9 9 9 7 Conclusion and suggestions for further improvement. 10 8 11 Major Problems Faced 9 User’s manual 11 10 References 12 2 1 Introduction The product is aimed to be a Glove based user interface which would act as a Keyboard as well as a mouse on any OS. The basic functioning is explained below: 1.1 Basic Functioning 1. The tilting motion of hand in different directions is used to control the cursor motion on the screen. The x and y accelerations are used for determining cursor speed on the screen. As we have implemented the USB HID type interface, the cursor location controlling happens via USB report format. The USB report needs one to specify δx and δy values for the cursor and a flag specifying whether a mouse key has been pressed. 2. The Resistive touchpad is used as a Keyboard. Based on the x and y voltage readings one can decide the location of contact. This is used to map a location to a specific key.The keypress information is sent via USB using an appropriate USB Report format. 3. To multiplex the the mouse and the keyboard functionalities, we use the z-axis acceleration from the accelerometer. if z-reading is positive, it implies that we wish to operate the mouse, while if it is negative, we wish to operate the keyboard. This physically corresponds to flipping of the palm. 1.2 Layout Diagram Figure 1: G-Cat Layout 3 1.3 Improvemets over past projects The project is based on a past EDL project:[Accelerometer based wireless mouse]. http://wel.ee.iitb.ac.in/wel45/public_html/edl09a/dd09.pdf We plan to implement a few improvements and modifications over the past project. Those are: 1. Instead of a mouse simulation in Matlab, we will be implementing a working mouse model. 2. In addition to the mouse, we would be implementing a basic keyboard. Implementing the system as a HID device ( human interface device) for platform independence. 3. Implementing an error-correcting communication library for PIC18F microcontrollers for low-end ASK modules (similar to virtualWire library for Arduino/ MSP430). 4. The project is based on use of accelerometers, resistive touch pad for user input, wireless communication for flexibility and implementing the system as a HID ( human interface device) for speed (and OS independence). 2 Problem statement Using gloves in both the hands , we plan to have a wireless user-interface similar to the conventional mouse and keyboard interface. The project would be useful to people with paralytic disabilities, who can move only some parts of their limbs. The GloveUI might not be suitable for heavy typing work. But, we plan to make it suitable for day-to-day jobs such as web browsing, accounting etc. which make intermittent use of mouse and keypad. As the project has intuitive appeal ( hand movements corresponding to mouse movements, or corresponding to arrow keys) , it would be in general fun to use . 2.1 Basic Functionality Requirements The functionalities of G-cat are: 1. It must function as a Mouse and a Keyboard on any OS. 2. It must be light, elegant and a practically usable device. 3. Making it wireless would be an additional functionality which would make it very flexible. 4. The power consumption must be low. The system must be in a stand-by mode when not in use. 5. If wireless , it is desirable to have battery life 3-6 months, or have a rechargeable battery. 4 3 Design approach 3.1 Design Approach The design approach which we followed is: 1. Conceptualise a wired proof of concept design. 2. Built the design using off the shelf components 3. Debug and modify the design so that the development boards and modules can be appropriately replaced . 4. Build a PCB board and implement the circuit on the PCB. 5. Try modifying the design to optimize component usage and manufacturing cost. 4 Design of circuit Here we present a brief justification of why we used a particular component. 1. Microcontroller: As we need to implement an USB – HID (human interfacing device) on the receiver side, we had 2 options: Atmega series: atmega 16,32, dont have native USB support. But there is a vusb library which can be used to convert the atmega microcontroller into a virtual USB. PIC 18 series: It has native USB support. We also came across a few projects which have implemented a HID using PIC18 series (which confirmed the feasibility). Also, as Wel lab has recently developed Aurum development boards based on PIC18F4550 , it would get us started early on the project. Link : http://59.181.142.81/uc/pic/index.php 2. accelerometer We needed to choose between analog vs digital accelerometers and also which IC needs to used. Its always good to use off the shelf components, and better to use modules as they are easy to interface. Understanding this fact, we had a look at analog (MMA7631 3-axis accelerometer ,range 2g) as well as digital accelerometer modules. We found that, for moderate sampling rate requirements analog accelerometers are much easier to interface, while digital ones are more useful for higher speeds. Hence we decided to go with digital accelerometers. 3. wireless modules In case of wireless transfer, its very difficult to create a module in such a short period. Hence, we decided to use modules which are not too expensive, so that they can be directly incorporated into the product. The 433 MHz ASK modules are ideal, as even though they dont have error correcting capabilities, they are cheap 300 Rs). 5 4. Switches For the mouse click switches, we had a few options, either using the standard push button switches on index and middle finger and pressing them using the thumb. But, this might require some force . The other option was choosing reed switches on middle and index fingers and a magnet on the thumb. This would then facilitate contactless switching. We chose the reed switches. 5. Keypad/Touchpad For The keyboard interfacing, we had a few options: using a 4x4 dot matrix and multiplexing the keys, using a resistive touchpad , or using capacitive touchpad. We thought of using resistive touchpad as it is much cheaper than the capacitive touchpad. 6. Layout the product layout was very essential for our project. We chose to place the PIC18F microcontroller circuit and the touchpad on the wrist so that there are no issues of flexibility of motion due to excessive weight. As shown in figure [1], only the accelerometer module would be placed on the hand to reduce weight. 5 Circuit diagrams, algorithmic flow diagram, board schematic diagrams 5.1 Algorithmic Flow diagram The Algorithmic flow diagram is given below: Figure 2: Algorithmic flow diagram 1. We decide whether mouse is being used , or keyboard is being used based on whether the palm is facing upwards or downwards. This corresponds to z-axis acceleration being compared with some threshold value. 6 2. If we are using the mouse, then we use the x and y axis accelerations to determine the cursor motion. 3. For Keyboard, the location of press on the touchpad determines which key is being pressed. 4. Finally this data is send in an appropriate USB report format so that the coputer recognizes the devise as a valid HID device. 5.2 Hardware Design Figure 3: Algorithmic flow diagram 5.3 Schematic Diagram The schematic diagram and the PCB layout are shown below. 7 1 PWRSEL 1 2 3 GND VBUS DD+ VDDIN C4 IN VDD OUT C5 ADJ GND R2 GND VBUS DD+ IC2 REG3.3 R12 1 2 RESET /RESET 3 4 BOOT GND RB4 RB5 RB6 RB7 RA0 RA1 RA2 RA3 C6 GND 44 43 42 41 40 39 38 37 36 35 34 33 32 31 30 29 28 27 26 25 24 23 RC6 D+ D- JP6 D3 D2 D1 D0 C3 RC6/TX/CK RC7/RX/DT/SDO RC5/D+/VP RD4/SPP4 RC4/D-/VM RD5/SPP5/P1B RD3/SPP3 RD6/SPP6/P1C RD2/SPP2 RD7/SPP7/P1D RD1/SPP1 VSS RD0/SPP0 VDD VUSB RB0/AN12/INT0/LFT0/SDI/SDA RC2/CCP1/P1A RB1/AN10/INT1/SCK/SCL RC1/T1OSI/ICCP2/UOE RB2/AN8/INT2/VMO NC/ICPORTS RB3/AN9/CCP2/VPO NC/ICRST/IVVPP NC/ICCK/ICPGC RC0/TIOSO/T13CKI NC/ICDT/ICPGD RA6/OSC2/CLKO RB4/AN11/KBI0/CSSPP OSC1/CLKI RB5/KBI1/PGM VSS RB6/KBI2/PGC VDD RB7/BKI3/PGD RE2/AN7/OESPP MCLR/VPP/RE3 RE1/AN6/CK2SPP RA0/AN0 RE0/AN5/CK1SPP RA1/AN1 RA5/AN4/SS/HLVDIN/C2OUT RA2/AN2/VREF-/CVREF RA4/T0CKI/CIOUT/RCV RA3/AN3/VREF+ RC2 RC1 RC0 Q1 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 RA6 C1 C2 15 16 1 RC7 D4 D5 D6 D7 GND VDD RB0 RB1 RB2 RB3 R1 VDDIN R3 1 2 3 IC1 LCD_CONNECTOR 1 GND 2 VDDIN 3 BLT D7 4 D6 5 D5 6 D4 7 D3 8 D2 9 D1 10 D0 11 EN 12 R/W 13 RS VDD 14 COM 3 4 2 RB0 RB1 RB2 RB3 RB4 RB5 RB6 RB7 VDD GND COM USB S4 PWR 2 3 4 JP5 2 VEXT 1 GND 4 3 2EXTPWR 1 GND R4 R5 R6 R7 R8 R9 R10 R11 VDD R13 L2 L1 ON 10 9 8 7 6 5 4 3 2 1 5 6 7 8 L4 GND L3 GND GND VDD EN R/W RS RA5 RA4 PIC18F RB5 RB6 RB7 GND VDD /RESET 6 5 4 3 2 1 DEBUG 29-May-12 15:49:12 f=1.20 C:\Documents and Settings\Administrator\My Documents\eagle\Aurum_v12\aurum_v2_0.sch (Sheet: 1/1) Figure 4: G-Cat schematic 5.4 PCB layout Figure 5: PCB layout 8 VDD RC6 RC7 GND RA5 RA3 RA1 GND 1 3 5 7 9 11 13 15 2 4 6 8 10 12 14 16 RC0 RC1 RC2 RA6 RA4 RA2 RA0 VDD Figure 6: board image 6 Test procedures 6.1 Test applications We conducted a few example applications in which the G-Cat would be useful and which would rank as good test examples: 1. Solitaire using G-cat We demonstrated how the game of solitaire can be played using the G-Cat. There were some issues like the smoothness of mouse motion and the thresholds applied for the cursor motion. 2. Roadrash using G-cat For playing roadrash using G-Cat, we mapped the arrow keys to accelerometer motion. i.e: a left tilt of accelerometer corresponds to the left arrow key and thus a left turn in the roadrash game etc. This made the game controls much more intuitive and very similar to that of a joystick. 3. Web browsing As G-cat is meant to be used for daily work on a computer, web browsing is one such example. We demonstrated webpage scrolling by again mapping the arrow keys. One needs a key to multiplex the operations of accelerometer as a mouse and as arrow keys. 6.2 Testing/Debugging methods Here we note down some procedures which we found very useful while debugging or testing a component of the system. 1. Accelerometer Whenever any problem was encountered with Accelerometer, the easiest way is to test it with arduino module. The serial out facility makes it very easy to test and debug if there is any problem . The testing codes can be found in the documentation folder. 9 2. Touchpad We faced significant problems with the touchpad. Whenever touchpad creates problems, the convenient way is to use a LCD and to print the ADC value onto it. 3. PIC18 Most of the microcontroller problems which we faced were due to corruption of bootloader on the PIC18f4550. In such cases, keep a PICKIT handy, so that the bootloader can be again put onto the microcontroller.So, if the MuC shies away from going into boot mode, just install the bootloader again and it will work fine. 4. USB Mouse To test whether basic USB HID functionality is working . The sample 4550m ouse in the documentation folder can be executed. This sample program moves the mouse in circular motion. Figure 7: Testing Setup 7 Conclusion and suggestions for further improvement. The project has significant scope for further development: 1. adding flex sensors, the product can be converted into a device for mute-sign language to english so that the mute people can easily communicate in the society. 2. Hand Gestures can be used to map some common functionalities like mapping a circular rotation of hand to increase /decrease in volume. 3. Some parts of the project indivisually can be modified eg: the ASK module wireless part can be used to transmit wireless data to computer using cheap modules. 10 8 Major Problems Faced Here we list down some of the major problems which we faced while we were working on the project and which can save the time of people who work on similar projects in the future. 1. In the case of Aurum board ( or any other board using USB to program the MuC) , There is a linker file which needs to be added to the Mplab project. also, a vector remapping code needs to inserted. Failing to do this would make the microcontroller code not get burnt on the MuC / the code would not work. 2. Interfacing wireless modules can be tricky business. 3. We faced major problems with the Touchpad. The non-availability of weak pull ups on port A of PIC18, makes it difficult to interface a resistive touchpad directly with the microcontroller. 9 User’s manual This is a short user manual for using the G-Cat. The functionality details are as follows: 1. Hand tilts refer to cursor motion on the screen. 2. One can use the touchpad for keypresses. As for the current implementation, only a few keys have been mapped onto the touchpad. 3. The switch presses correspond to left and right clicks. 1. The first step is installing the bootloader on the PIC18 microcontroller on the board. Use PICKIt to install the bootloader. 2. Compile the project blink using C18 compiler and load the hex file onto the microcontroller using the HIDBootloader.exe. This test program blinks the the LED at port RA1. This would confirm that the bootloader was succesfully installed. 3. To implement the actual application, compile the 4550M ouseK ey1 project and burn the hex file generated. If everything works well, the application has been loaded onto the board. 4. In case the previous step doesnt work out well, first try compiling and running 4550M ouseproject. This project runs only the mouse using the accelerometer readings. Still if the problem persists refer to the debugging section of the report (first debug the problems on the Aurum development board). 11 10 References 1. PIC18f4550 datasheet www.microchip.com 2. Aurum board user manual 59.181.142.81/ 3. USB Serial bus Device class definition HID www.usb.org/developers/devclass_ docs/HID1_11.pdf 4. VirtualWire library for wireless communication www.virtualwire.in 5. Microchip Application Library 6. USB HID device usage table www.usb.org/developers/devclass_docs/Hut1_11. pdf 12