Transcript
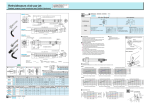
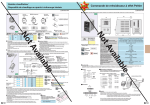
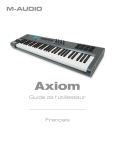
Robots à axe simple RSDType à tige Certified EVoir les remarques sur le marquage CE DP.396 Données CAO Tous les documents associés aux directives techniques (2006/42/EC), tels que les guides d‘utilisation, ne sont disponibles qu‘en anglais. QComposants structuraux : Robot/Contrôleur/Câble QAccessoire Sans guide de support RSD1 Avec guide de support RSDG1 Réf. pièce Guide (mm) Type Sélections Module E/S Longueur du câble (m) Contrôleur avec ou sans frein (E1) Course (mm) Spécifications E/S du contrôleur NPN/PNP CC-Link DeviceNet Manuel d'instructions (CD-ROM)/Connecteur électrique/Connecteur factice - QMatériau du robot/Traitement de surface Type RSDG1 Corps MMatériau Aluminium Vis à billes Type CD-ROM du manuel d'instructions RSD1 RSDG1 Spécification du contrôleur WP.393 Ø8 (C10 laminées) Résolveur Pas-à-pas (incrémental) 06 12 RSD1 RSDG1 Vertical RSD1 RSDG1 ~8 ~7.5 ~4 ~3.5 RSD1 (sans guide de support) Force de poussée maximale (N) 100 75 A M4x0.7 profondeur 5 (pour câble de montage) Vue en flèche A Durée de vie nominaleE1 Mouvement perdu (mm) 5000km ou plus 0.1 ou inf. Trou de lubrication pour vis à billes Exactitude de la tige hors rotation (degrés) RSD1 RSDG1 ±1.0 (Ø6.5) 1.5 10 8 ±0.05 Vitesse Contrôleur maximaleE2 Alimentation (mm/s) d'entrée Course (mm) ~250 ~500 50~200 (pas de 50) Nombre maximal de points de positionnement 24V CC ±10% 5 13 15 Course Vis à billes M4x0.7 profondeur 5 35 25 L+40 (avec frein) Bride de montage du robot (à spécifier dans les modifications) 50 20.5 41 Trou traversant 4-Ø4.5 17.5 (5) 38.5 (0.5) 21 Course (5) 10 15 56.5 10 (pour câble de montage) 105 97 83 23 23 23 35 L1 Pas 12 15 10 25 50 150 261 349 4 10 200 300 400 500 Pas 12 4 0 100 Pas 6 6 2 10 8 Pas 6 Pas 12 6 4 2 0 0 600 Vertical 100 200 300 400 500 600 0 100 200 300 400 500 600 Vitesse (mm/s) Vitesse (mm/s) QTableau Durée de vie ELa durée de vie nominale est de5000km ou plus. Pour les types suivants, cependant, la durée de vie varie en fonction de la masse transférée maximale et de la manière dont elle est appliquée. RSD2 RSDG2 Vertical Vertical 6000 6000 5000 4000 3000 2000 1000 Trou traversant 4-M4x0.7 5000 4000 3000 2000 1000 Pas 12 (Pour montage de la base) 0 0 1 2 3 Pas 12 0 4 0 0.5 1 Capacité de charge (kg) 8-M4x0.7 profondeur 10 41 (Remarque 1) La charge ne peut être appliquée que dans la direction axiale. Veiller à utiliser conjointement des guides à montage externe de manière à ce qu'aucune charge radiale ne s'applique sur les tiges. (Remarque 2) L'orientation du diamètre entre plats n'est pas déterminée par la surface basale. (Remarque 3) Le schéma de RSD1 illustre les pieds de montage installés du robot. Le nombre de trous K est tel qu'indiqué dans le Tableau des dimensions. (Remarque 4) Utiliser avec des guides de support pour garantir un déplacement en ligne droite. (Remarque 5) Le rayon de pliage minimum du câble du robot est de R30. (Remarque 6) Fixer les câbles du robot pour éviter les charges. Terminal portable Spécification standard 1.5 2 2.5 3 3.5 Capacité de charge (kg) 200 311 391 5 12 Type RSD1 RSDG1 50 1.1 1.5 Course (mm) 100 150 200 1.3 1.4 1.6 1.7 1.9 2.1 ELe type "à frein" est 0.2kg plus lourd. Réf. pièce - Types de contrôleur - Types E/S - RSD106B - C1 - N - Terminal portable Logiciel d'assistance Logiciel d'assistance Câble E/S Avec commutateur Avec câble de Avec câble de d'homme mort communication USB communication RS232C Longueur du câble 3 - Course - (E, H, etc.) - 200 - S-MJ Manuel d'instructions Manuel d'instructions Modifications de la Plaque de base Bride de montage du robot du contrôleur couleur du plastique de montage du robot du robot du corps principal Modifications Code QMasse (kg) 100 211 299 3 8 8 0 Modifications K-M3x0.5 profondeur 4 50 161 249 2 6 10 5 0 RSDG1 Vertical (pour montage d'outil utilisateur) L L+40 (avec frein) Hx50 Pas 6 4 45 55 10 Env. 250m (longueur de câble) 37.5 20 20.5 (pour câble de montage) (Ø6.5) M4x0.7 profondeur 5 10 37.5 27 4-M4x0.7 profondeur 5 (prix du corps du robot)+(prix du contrôleur)+(prix du câble)=prix total <Exemple> Pour le numéro de commande, (prix du robot)+(prix du contrôleur)+(prix du câble)=prix total 491,00€ + 135,00€ + 55,00€ = 681,00€ RSD1 Horizontal Durée de vie (km) 68.5 Trou de lubrication pour vis à billes C D 25 22 27 30 35 9.5 Vue en flèche A 35 35 6 (pour câble de montage) 35.5 19.5 18 Ø15 Ø8 A M4x0.7 profondeur 5 55 70.5 17.5 RSDG1 (avec guide de support) Aucun circuit d'interruption de l'alimentation n'est installé sur ce contrôleur afin qu'il puisse s'adapter aux divers niveaux de sécurité. Veiller à fabriquer un circuit d'interruption de l'alimentation externe et à installer un circuit d'arrêt d'urgence. Exemples de circuits DP.394 Prix unitaire en € 1~5 pièce(s) Vitesse (mm/s) 24 34 56.5 Hx50 Délai de livraison (jours) 1 3 5 10 RSD1/RSDG1 4-M3x0.5 profondeur 10 11 (séparation égale 90°) 73 ou plus 4-M3x0.5 profondeur 4 10 Jours 150 Remarque 200 Durée de vie (km) 10 L Course QTableau Vitesse-Capacité de charge maximale Vis à bille point de lubrification L1 10 (pour câble de montage) Longueur du câble (m) N P M8x1.25 Capacité de charge (kg) 48 58 15 38.5 (0.5) 11 21 P.C .D.2 9 (câble élastique) - 3 QPrix du câble unitaire en € Module E/S Prix 1~5 pièce(s) Types Position de base 48 - EPour les commandes supérieures aux quantités indiquées, demander un devis. (15) 68.5 (5) Ø16 (5) (37.5) - Longueur du câble - Prix unitaire en € 1~3 unité(s) Course (mm) 100 150 QPrix du contrôleur Env. 250m (longueur de câble) 56.5 N 255 points 27 9.5 M4x0.7 profondeur 5 1 -375 Module E/S - C1 (pour câble de montage) RSD1 RSDG1 - C1 RSD1__ RSD1__B RSDG1__ RSDG1__B Ecrous fournis 18 M8x1.25 7.5 (largeur sur les méplats) 10 Course (mm) L1 L H K Contrôleur - Réf. pièce E1. La durée de vie du déplacement vertical dépend de la capacité de charge. Consulter le tableau Durée de vie. E2 La vitesse maximale varie en fonction de la capacité de charge. Consulter le tableau Vitesse-Capacité de charge. QDimensions Type - RSD106B 50 Capacité de charge maximale (kg) ~20 ~10 ±0.02 Réf. pièce Capacité de charge (kg) Répétabilité du Guide positionnement (mm) Horizontal (mm) 50~200 (Incrément de 50mm) QPrix du corps du robot Prix 0~40°C, 35~85%HR (garanti sans condensation) QSpécifications standard Terminologie WP.396 Type NPN : N PNP : P CC-Link : C DeviceNet : D C1 24V CC±10% 12 Exemple de commande Détecteur Température/humidité de position ambiantes de fonctionnement Moteur rien inscrire 1 3 5 10 (E1) Choisir le type "avec frein" en cas d'utilisation dans des applications verticales. QSpécifications générales Contrôleur Sans : ne Avec : B Bille Tiges Cache Arbre Manchon Acier ABS STraitement de surface Peinture acrylique Aluminium Acier ABS Acier Acier MMatériau Peinture acrylique STraitement de surface - RSD1 Câble Composants 06 RSD1 RSDG1 Connecteur CC-Link Connecteur DeviceNet Capacité de charge (kg) A Accessoire Spéc. Supplément de prix H Terminal portable fourni avec les spécifications standard. Spécifications DP.359, 395 343,00 D S R T MJ/ME Terminal portable fourni avec les spécifications avec commutateur d'homme mort. Spécifications DP.359, 395 Logiciel d'assistance fourni avec un câble de communication USB. Spécifications DP.359, 395 Logiciel d'assistance fourni avec un câble de communication RS232C. Spécifications DP.395 Le câble E/S est fourni. Requis pour les configurations NPN/PNP. Spécifications DP.360, 395 Pour les structures principales du robot. Manuel d'instructions MJ : japonais ME : anglais 568,00 177,00 140,00 19,00 12,00 KJ/KE BC HP VP Pour les contrôleurs Manuel d'instruction KJ : japonais KE : anglais Remplacer la couleur des pièces en plastique du robot par noir. 2 plaques sont fournies pour le montage horizontal. Spécifications DP.395 1 plaque est incluse pour le montage vertical. Spécifications DP.395 12,00 5,00 23,00 23,00 EPour les options, se reporter à la P.395 Tous les documents associés aux directives techniques (2006/42/EC), tels que les guides d‘utilisation, ne sont disponibles qu‘en anglais. 1 -376