1
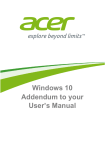
BL-NavLV Quick Start Guide - 1 1 1 LED Lights Connections and Programming T connector x 1 controller PCB x 8 LEDs / cables and connectors Landing - white (constant on) - Bat. (1s~6s) + USB Ext. supply (5v~24v) Landing (white) Nav (green) Nav (white) Nav (white) Landing (white) SW 2 SW 3 off off off off off off Nav - green (constant on) Nav - white (blinking on / off) Note : LED lights can be doubled up to a maximum of 16 LEDs in total with no loss of brightness (No more than 2 LEDs per output otherwise damage may result). See user manual for more details RC o/p for servo switching and 5v, 3A / 4A (burst) BEC 1. . 4 4. . 1 SW 4 off : High brightness SW 4 on : ULTRA bright SW 1 Landing - white (constant on) Nav - white (blinking on / off) Landing / beacon - (red) RC Rx input (on / off) Set DIP 1 switches to all ON to check out the warning flashing sequence Landing - white (constant on) Landing (white) Nav (red) DIP 1 Nav - red (constant on) Status LEDs Meaning DIP 2 SW 4 off : RC o/p and i/p (max pulse active) SW 4 on : RC o/p and i/p invert Landing - red (beacon) (blinking on / off) Meaning SW 1 SW 2 SW 3 Low Bat Volt mode off off off off Low time mode off LiPo below safe (flashing) LiPo below v. low (on) on 1 cell off off on 10 minutes System ok (flashing) on off 2 cells off on off 15 minutes off on on 3 cells off on on 20 minutes Volt mode (flash on) Time mode (flash off) Both (flashing on / off) on off off 4 cells on off off 30 minutes on off on 5 cells on off on 40 minutes on on off 6 cells on on off 50 minutes on on on Low Bat test flashing on on on 60 minutes PCB status LEDs Ultra bright (const. on) High bright (off) See www.bluelight-tech.com for full User Manual (+ optional PC tool) 1. Select the number of cells if you want the warning flashing sequence to happen when the voltage falls below a safe level 2. Select the time if you want the warning flashing sequence to happen after a certain time (after system power up) BL-NavLV Quick Start Guide - 2 2 Battery Connections (example set-up) 1 USB (set-up program available) Must be ground ESC Motor T connector Y cable LiPo Bat Must be ground (up to 6 cells) Must be ground Arrows show must be ground, if connected black - ground Bat. (e.g. 9v) Gear up / or any RC Rx output LiPo Check red - power Rx Back-up battery (7v ~ 24v) To Bat or any RC Rx input BEC output High On On Low On Off D1 On for ULTRA bright mode 4 3 On On Mid Off Off Low On Off black - ground 4 If main LiPo fails, RC Rx / servos operated via the 9v (or similar) back-up battery D2 On to invert switch 3 way RC Tx switch Sw Landg. Nav. High Cable to deploy the landing gear coincident with the landing lights being switched on (See tables to the left) red - 5v Input switches between Nav and landing lights 2 way RC Tx switch Sw Landg. Nav. To optional gear up servo black - ground red - 5v See www.bluelight-tech.com for full User Manual Note 1 : Ground (black) wires on the 3 pin connectors MUST BE on the outside edges of the BL-NavLV PCB Note 2 : You will need to make your own connection cables, depending on specific requirements and battery connectors you use PCB Red LED on or flashing? Don’t fly the attached LiPo ! 1 Simple LED Lights Only 1. If you only want to use the LED lights function you can simply connect one of these input power sources to the BL-NavLV PCB: Battery to the T connector Battery to Ext supply 5v supply to the RC Rx input 5v supply to the RC o/p 2. Then set the DIP switches (D1 and D2) to ALL off, or D1 SW4 on for ULTRA bright mode. Free PC tool is available for advanced features