1
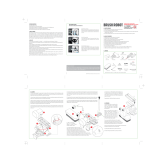
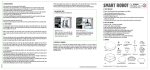
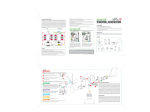
T B - HEAD S Align triangles and match sequence numbers 2 A3 F. INSTRUCTIONS: FINAL ASSEMBLY Double adhesive foam E A1 C - ARM Insert F to form the nose. AA V 1.5 AA V 1.5 Moving on smooth floorings... Your robot is designed for movement on most floor surfaces including rugged surfaces like cement or carpeted floorings. If you are playing your robot on a smooth surface like ceramic or wood tiled floorings, you may tie rubber bands to the wheels. This will increase the friction between the wheel and the floor. The friction is required for driving most wheels-driven machines. 6 B B1 If your robot is going slow... Change the batteries. (See Diagram) 17 W1 6 6 A2 6 A3 9 W2 A1 C 2233 A1 10 X - COVER 3 10 W - MOVING ARMS A4 8 V - COVER 2 Double adhesive tape 7 U - COVER 1 D.4. Install structure made in D.3 to Platform Y. Double adhesive tape 7 (with worm gear and wires installed) (with gear installed) A4 How does your robot work? When the power is on, the motor turns the set of gears installed. One of the gears turns the arms, making the robot arms and the antenna moving up and down. Why do the robot move? Another gear is installed to the front wheel axle which controls a pair of front wheels. The wheels are driven by the gear actions when the power is on. A2A4 22 A D A3 D.5. Connect BLACK wires Y - BASE PLATFORM Z - WHEELS X 4 PCS DOUBLE ADHESIVE FOAM, DOUBLE ADHESIVE TAPES Connecting tabs tapes For fixing the mechanical base to the cardboard casing For fixing the cardboard casing 22 12 (with switch installed) from the battery and the motor. Place both wires to the centre hole of the rivet. Press the plastic tab into the hole to fix the wires in place. The circuit will be connected through the metal rivet. Connect the RED wires from motor and from the switch the same way as above. STRUCTURE MADE IN E.4 D.6. Inner Mechanical Engine completed. E.3. Stick A4 to cover to complete the main body casing. E.4. The Main Body Casing is completed. 23 F.4. Assemble the different parts to the main body made in E.4 to complete the Robot. F.3. Stick and build the Arms C & D. Did you know who was the first one to introduce the word "Robot" ? In 1920, Czechoslovakian playwright Karel Capek introduced "Robot" to the world in the play R.U.R Rossum's Universal Robots. The word came from the Czech "Robota", which means tedious labour. Did you know any robot which has orbit the Earth for 6500 times? Named Canadarm, the Remote Manipulator System is the robot arm which is built on the Space Shuttle. It was originally built by a Canadian company. It helps accomplishing various tasks in the Space Shuttle missions. It has travelled 175 million miles in space and has completed over 6,500 orbits around the Earth. Did you know over 90% of the robots nowadays are industrial robots which work in factories, laboratories, plants etc? Decades ago, most of the robots were employed by the car industries. They do a variety of tasks in car assembly lines. These days, the use of robots are more spread out among the industries as stated above. Did you know an alarm clock is a robot too? By definition a robot is an obedient but impersonal machines which automate tasks after it is programmed. A robot is made of 3 elements in its definition: a body, a programmed control and a programmed behaviour. In the alarm clock, the body is the clock, setting the alarm is the control and the alarm signal is the automatic programmed behaviour. Fun!? © 2005 4M INDUSTRIAL DEVELOPMENT LIMITED 41-03254/1 7 Y Slide in the cardboard extension (printed green) to the corresponding slot to further secure the casing structure. the head. D D.3. Put Arm W to the extension point of Gear S, and install Cover X as shown. H. FUN FACTS F.2. Stick and build B1 to make 12 T - MOTOR E.2. Use the double adhesive foam to stick Inner Mechanical Engine made in step D1-6 to Main Body Part A1. Fold and stick A2 & A3 to build the preliminary body case. 10 S - GEAR 8 R - AXLE E.1. Stick Body Part A2 and A3 to the corresponding sides of A1. X Insert eye masks A3 8 PARTS OF INNER MECHANICAL ENGINE 9 41-03254/1 A3 9 QUESTION AND COMMENTS We treasure you as a customer and your satisfaction with this product is important to us. In case you have any comments or questions, or you find any parts of this kit missing or defective, please do not hesitate to contact our distributor in your country, whose address is printed on the package. You are also welcome to contact our marketing support team at Email: [email protected], Fax (852) 25911566, Tel (852) 28936241, Web site: WWW.4M-IND.COM A3 the slot. A2 B. USE OF BATTERY 1. Requires two 1.5V batteries (Not included). 2. For optimum operation, always use fresh batteries. 3. Insert batteries according to the correct polarities. 4. Make sure that the supply terminals are not short circuited. 5. Do not leave batteries in the toy if it is not in use. 6. Remove empty batteries from the toy. 7. Do not recharge non-rechargeable batteries. 8. Rechargeable batteries should be removed from the toy before being charged (if removable). 9. Rechargeable batteries should only be charged under adult's supervision. 10. Do not mix old and new batteries. 11. Do not mix alkaline, standard (Carbon-Zinc) or rechargeable (Nickel-Cadmium) batteries. 12. Only use batteries of the same or equivalent type. 13. The toy should not be connected to more than the recommended number of power supplies. A 3 1. Please read through this instruction before you start. 2. This kit is intended for age 8 and ups. 3. Adults assistance and supervision required. 4. This kit and its finished product contain small parts which may cause choking if misused. Keep away from children under 3 years old. 5. Wires may contain sharp points, adult assistance required during connection. 6. Never touch the contacts inside the battery case to prevent possible short circuit. 2 STRUCTURE MADE IN D.3 F - NOSE A2 A1 F.1. Inset the Antenna E into 15 A. SAFETY MESSAGES E - ANTENNA made in D.1 with Cover U. D - ARM W1 3 ON D.2. Cover the structure If your robot is not moving... 1. Check if batteries are empty. 2. Check if batteries are placed in correct polarities. 3. Check if all connection points are secured. 13 and Motor T into Cover V. OFF A1 A1 If your robot goes backwards... 1. Check if batteries are placed in correct polarity. 2. Check if wire connections to the motor are in correct order. F 7 D.1. Install Axle R, Gear S, STRUCTURE MADE IN D.1 1 U Always turn your robot off when you are performing any checking. Replacing the batteries... open the cover at the back of your robot and install the batteries as illustrated inside of the cover. B 1 W2 G. REMARKS / TROUBLE SHOOTING: 12 V R B The Outer Body Casing consists of 4 major parts as Main Body Structure A, Head B, Arm C and Arm D, plus the Nose, Antenna and Eye Masks. Just fold and stick the corresponding edges with double adhesive tapes provided. The step sequence is printed on the connection edges. Corresponding sides are matched with the same sequence number printed in a triangle. Just match the sequence number and align the direction of the triangle and the casing should be built easily. Apply double adhesive tape on areas printed blue A4 A2 E. INSTRUCTIONS: MAKING THE OUTER BODY CASING 14 A - MAIN BODY (A1, A2, A3, A4) Remarks: to increase motion performance and easiness of assembly, you may apply some sort grease to reduce friction between the gears and connecting points. Cooking oil will serve the purpose. Ask an adult's assistance. 11 PARTS OF OUTER BODY CASING D. INSTRUCTIONS: MAKING THE INNER MECHANICAL ENGINE 16 • • •• •••• • • • •• •• • •• • • •• •• • • • •• • ••• • • •• • • • • • • •••• • • ••• •• • ••• •••• • • ••• •• • • •• • •••• •••• •• • • • The robot is composed of an Outer Body Casing and an Inner Mechanical Engine. The parts are listed and illustrated below: 2 Not for Children under 3 C. CONTENTS 8 WARNING CHOKING HAZARD Small parts. T B - HEAD S Align triangles and match sequence numbers 2 A3 F. INSTRUCTIONS: FINAL ASSEMBLY Double adhesive foam E A1 C - ARM Insert F to form the nose. AA V 1.5 AA V 1.5 Moving on smooth floorings... Your robot is designed for movement on most floor surfaces including rugged surfaces like cement or carpeted floorings. If you are playing your robot on a smooth surface like ceramic or wood tiled floorings, you may tie rubber bands to the wheels. This will increase the friction between the wheel and the floor. The friction is required for driving most wheels-driven machines. 6 B B1 If your robot is going slow... Change the batteries. (See Diagram) 17 W1 6 6 A2 6 A3 9 W2 A1 C 2233 A1 10 X - COVER 3 10 W - MOVING ARMS A4 8 V - COVER 2 Double adhesive tape 7 U - COVER 1 D.4. Install structure made in D.3 to Platform Y. Double adhesive tape 7 (with worm gear and wires installed) (with gear installed) A4 How does your robot work? When the power is on, the motor turns the set of gears installed. One of the gears turns the arms, making the robot arms and the antenna moving up and down. Why do the robot move? Another gear is installed to the front wheel axle which controls a pair of front wheels. The wheels are driven by the gear actions when the power is on. A2A4 22 A D A3 D.5. Connect BLACK wires Y - BASE PLATFORM Z - WHEELS X 4 PCS DOUBLE ADHESIVE FOAM, DOUBLE ADHESIVE TAPES Connecting tabs tapes For fixing the mechanical base to the cardboard casing For fixing the cardboard casing 22 12 (with switch installed) from the battery and the motor. Place both wires to the centre hole of the rivet. Press the plastic tab into the hole to fix the wires in place. The circuit will be connected through the metal rivet. Connect the RED wires from motor and from the switch the same way as above. STRUCTURE MADE IN E.4 D.6. Inner Mechanical Engine completed. E.3. Stick A4 to cover to complete the main body casing. E.4. The Main Body Casing is completed. 23 F.4. Assemble the different parts to the main body made in E.4 to complete the Robot. F.3. Stick and build the Arms C & D. Did you know who was the first one to introduce the word "Robot" ? In 1920, Czechoslovakian playwright Karel Capek introduced "Robot" to the world in the play R.U.R Rossum's Universal Robots. The word came from the Czech "Robota", which means tedious labour. Did you know any robot which has orbit the Earth for 6500 times? Named Canadarm, the Remote Manipulator System is the robot arm which is built on the Space Shuttle. It was originally built by a Canadian company. It helps accomplishing various tasks in the Space Shuttle missions. It has travelled 175 million miles in space and has completed over 6,500 orbits around the Earth. Did you know over 90% of the robots nowadays are industrial robots which work in factories, laboratories, plants etc? Decades ago, most of the robots were employed by the car industries. They do a variety of tasks in car assembly lines. These days, the use of robots are more spread out among the industries as stated above. Did you know an alarm clock is a robot too? By definition a robot is an obedient but impersonal machines which automate tasks after it is programmed. A robot is made of 3 elements in its definition: a body, a programmed control and a programmed behaviour. In the alarm clock, the body is the clock, setting the alarm is the control and the alarm signal is the automatic programmed behaviour. Fun!? © 2005 4M INDUSTRIAL DEVELOPMENT LIMITED 41-03254/1 7 Y Slide in the cardboard extension (printed green) to the corresponding slot to further secure the casing structure. the head. D D.3. Put Arm W to the extension point of Gear S, and install Cover X as shown. H. FUN FACTS F.2. Stick and build B1 to make 12 T - MOTOR E.2. Use the double adhesive foam to stick Inner Mechanical Engine made in step D1-6 to Main Body Part A1. Fold and stick A2 & A3 to build the preliminary body case. 10 S - GEAR 8 R - AXLE E.1. Stick Body Part A2 and A3 to the corresponding sides of A1. X Insert eye masks A3 8 PARTS OF INNER MECHANICAL ENGINE 9 41-03254/1 A3 9 QUESTION AND COMMENTS We treasure you as a customer and your satisfaction with this product is important to us. In case you have any comments or questions, or you find any parts of this kit missing or defective, please do not hesitate to contact our distributor in your country, whose address is printed on the package. You are also welcome to contact our marketing support team at Email: [email protected], Fax (852) 25911566, Tel (852) 28936241, Web site: WWW.4M-IND.COM A3 the slot. A2 B. USE OF BATTERY 1. Requires two 1.5V batteries (Not included). 2. For optimum operation, always use fresh batteries. 3. Insert batteries according to the correct polarities. 4. Make sure that the supply terminals are not short circuited. 5. Do not leave batteries in the toy if it is not in use. 6. Remove empty batteries from the toy. 7. Do not recharge non-rechargeable batteries. 8. Rechargeable batteries should be removed from the toy before being charged (if removable). 9. Rechargeable batteries should only be charged under adult's supervision. 10. Do not mix old and new batteries. 11. Do not mix alkaline, standard (Carbon-Zinc) or rechargeable (Nickel-Cadmium) batteries. 12. Only use batteries of the same or equivalent type. 13. The toy should not be connected to more than the recommended number of power supplies. A 3 1. Please read through this instruction before you start. 2. This kit is intended for age 8 and ups. 3. Adults assistance and supervision required. 4. This kit and its finished product contain small parts which may cause choking if misused. Keep away from children under 3 years old. 5. Wires may contain sharp points, adult assistance required during connection. 6. Never touch the contacts inside the battery case to prevent possible short circuit. 2 STRUCTURE MADE IN D.3 F - NOSE A2 A1 F.1. Inset the Antenna E into 15 A. SAFETY MESSAGES E - ANTENNA made in D.1 with Cover U. D - ARM W1 3 ON D.2. Cover the structure If your robot is not moving... 1. Check if batteries are empty. 2. Check if batteries are placed in correct polarities. 3. Check if all connection points are secured. 13 and Motor T into Cover V. OFF A1 A1 If your robot goes backwards... 1. Check if batteries are placed in correct polarity. 2. Check if wire connections to the motor are in correct order. F 7 D.1. Install Axle R, Gear S, STRUCTURE MADE IN D.1 1 U Always turn your robot off when you are performing any checking. Replacing the batteries... open the cover at the back of your robot and install the batteries as illustrated inside of the cover. B 1 W2 G. REMARKS / TROUBLE SHOOTING: 12 V R B The Outer Body Casing consists of 4 major parts as Main Body Structure A, Head B, Arm C and Arm D, plus the Nose, Antenna and Eye Masks. Just fold and stick the corresponding edges with double adhesive tapes provided. The step sequence is printed on the connection edges. Corresponding sides are matched with the same sequence number printed in a triangle. Just match the sequence number and align the direction of the triangle and the casing should be built easily. Apply double adhesive tape on areas printed blue A4 A2 E. INSTRUCTIONS: MAKING THE OUTER BODY CASING 14 A - MAIN BODY (A1, A2, A3, A4) Remarks: to increase motion performance and easiness of assembly, you may apply some sort grease to reduce friction between the gears and connecting points. Cooking oil will serve the purpose. Ask an adult's assistance. 11 PARTS OF OUTER BODY CASING D. INSTRUCTIONS: MAKING THE INNER MECHANICAL ENGINE 16 • • •• •••• • • • •• •• • •• • • •• •• • • • •• • ••• • • •• • • • • • • •••• • • ••• •• • ••• •••• • • ••• •• • • •• • •••• •••• •• • • • The robot is composed of an Outer Body Casing and an Inner Mechanical Engine. The parts are listed and illustrated below: 2 Not for Children under 3 C. CONTENTS 8 WARNING CHOKING HAZARD Small parts.