1
Universidade Federal do Ceará
Centro de Tecnologia
Programa de Pós-Graduação em Engenharia Elétrica
André Pimentel Moreira
Controle de Vazão de Biogás com Baixa Pressão para
Produção Descentralizada de Eletricidade
Fortaleza
Outubro de 2011
i
André Pimentel Moreira
Controle de Vazão de Biogás com Baixa Pressão para
Produção Descentralizada de Eletricidade
Dissertação submetida à Universidade Federal do Ceará como parte dos requisitos
para a obtenção do grau de mestre em
Engenharia Elétrica.
Orientador:
Prof. Paulo Cesar M. de Carvalho, Dr.
Fortaleza, Outubro de 2011.
ii
Controle de Vazão de Biogás com Baixa Pressão para
Produção Descentralizada de Eletricidade
Esta Dissertação foi julgada adequada para a obtenção do título de mestre
em Engenharia Elétrica, Área de Concentração em
Energias Renováveis e
Sistemas Elétricos, e aprovada em sua forma nal pelo Programa de
Pós-Graduação em Engenharia Elétrica da Universidade Federal do Ceará.
Prof. Paulo Cesar Marques de Carvalho, Dr.
Orientador
Fernando Luiz Marcelo Antunes, PhD.
Coordenador do Programa de Pós-Graduação em Engenharia Elétrica
Banca Examinadora:
Paulo Cesar Marques de Carvalho, Dr.
Presidente
Alberto Willian Mascarenhas, Dr.
Ricardo Silva Thé Pontes, Dr.
Sérgio Daher, Dr.
iii
Dedicatória
Dedico este trabalho a toda minha família, em especial, aos meus pais José
Almir (in memorium) e Ernestina, aos meus irmãos Andréia e Júnior, que
sempre estiveram ao meu lado me incentivando a transpor todos os desaos
pessoais e prossionais, aos meus lhos Sabrina e Matheus por todo amor e
carinho, aos meus tios José Otoni (Tuti), Ernesto Pimentel (Tuca), Roberto
e Conceição pelos conselhos e ensinamentos.
iv
Agradecimentos
Agradecimento especial ao meu orientador Professor Paulo Carvalho e
a Professora Laurinda Lúcia Nogueira dos Reis, pela amizade, dedicação,
atenção, paciência e apoio durante a elaboração deste trabalho.
Ao Banco do Nordeste pelo apoio nanceiro para a instalação da Planta
de Produção de Biogás do Laboratório de Energias Alternativas da UFC.
À Recolast Ambiental pela doação do biodigestor tubular.
À Lubnor (Petrobrás) por realizar a análise química do biogás produzido
no Laboratório de Energias Alternativas da UFC.
A todos os colegas do Serviço Nacional de Aprendizagem Industrial do
Ceará - SENAI-CE, especial os amigos Tarcisio Bastos e Mônica Machado,
que sempre acreditaram no meu trabalho.
Aos colegas do Departamento de Indústria do Instituto Federal de Educação, Ciência e Tecnologia do Ceará - IFCE, Geraldo Ramalho, José Renato,
Cláudio Sá, Evaldo Mota, Clayton Ricarte e Agamenon Gois, pelo incentivo
e colaboração.
A minha namorada Danielle e aos amigos Nuno Monteiro e Eduardo
Macário, que com amor, carinho, dedicação, paciência sempre estiveram ao
meu lado.
Aos amigos da Pós-Graduação do Departamento de Engenharia Elétrica
da Universidade Federal do Ceará - UFC, Manuel Rangel, Sigefredo, Luis
Carlos pelo companheirismo e colaboração nas revisões e sugestões de melhoria desse trabalho.
v
Moreira, A. P. "Controle de Vazão de Biogás com Baixa Pressão para Produção Descentralizada de Eletricidade". Universidade Federal do Ceará - UFC,
2011, 153p.
A presente dissertação propõe a implementação de um sistema de aquisição de dados, controle e monitoramento de uma planta de geração de energia
elétrica acionada por biogás. Foi realizado o estudo experimental das estratégias de modelagem, identicação e controle aplicado ao controle de vazão
da planta de biogás do Laboratório de Energias Alternativas - LEA da Universidade Federal do Ceará - UFC. Foi utilizado e testado para o controle
de vazão de biogás o controlador PI paralelo, além de realizar a comparação
com o controle existente (controle centrífugo) do conjunto motor/gerador.
Para vericar a resposta do gerador movido a biogás, foi inserido uma carga
correspondente a 60% da potência nominal. O sistema proposto reduziu a intervenção humana no ajuste de vazão da válvula de expansão. Os resultados
demonstraram que o tempo de resposta para estabilidade após a introdução do contolador PI ao controlador original permitiu a redução do tempo
de resposta para estabilidade em no mínimo 20% mostrando uma resposta
satisfatória e boa estabilidade para a transição da gasolina para o biogás,
com amplitude de 10 Hz e 8 segundos para estabilização do sistema sem
carga. A ação foi considerada viável para automatizar o processo de partida
do conjunto motor/gerador.
Palavras-chave: Biogás. Biodigestores. Algoritmo PI. Controle de Vazão.
Sistema de Monitoramento.
vi
Moreira, A. P. "Low Pressure Biogas Flow Control for Decentralized Electricity Production". Federal University of Ceará - UFC, 2011, 153p.
The present dissertation proposes the implementation of a data acquisition system, control and monitoring of a electricity generation plant powered
by biogas. The experimental study of the modelling strategies, identication
and control was done applied to ow control of the biogas plant of the Renewable Energy Laboratory - LEA at the Federal University of Ceará - UFC.
To control the biogas ow a parallel PI controller was used and tested, and
the controller was used to perform the comparison with the existing control
(centrifugal control) of the gen-set. To check the response of the gen-set
powered by biogas, a load corresponding of 60% of the nominal power was
used. The proposed system reduced the human intervention in ow setting
of the expansion valve. The results showed that the stability response time
after the introduction of the PI controller to the original controller allowed
the reduction of the response time for at least 20% showing a satisfactory
response and a stability for the transition from gasoline to biogas, with 10 Hz
amplitude and 8 seconds for the system stabilization with load. This action
was considered feasible to automate the process of starting up of the gen-set.
Keywords: Biogas. Digesters. PI algorithm. Control Flow. Monitoring
System.
Sumário
Resumo
v
Lista de Tabelas
xi
Lista de Figuras
xii
Lista de Abreviaturas
xv
1 Introdução
1.1
Contextualização . . . . . . . . . . . . . . . . . . . . . . . . .
1
1.1.1
Sistemas Centralizados de Geração Elétrica no Brasil .
3
1.1.2
Fontes Alternativas e Sistemas Descentralizados . . . .
7
1.1.2.1
Panorama Internacional . . . . . . . . . . . .
7
1.1.2.2
Panorama no Brasil . . . . . . . . . . . . . . 10
1.1.3
1.2
1
Diculdades na Geração Descentralizada . . . . . . . . 13
Motivação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.2.1
Redução da Poluição Ambiental . . . . . . . . . . . . . 14
1.2.2
Custos de Manutenção e Produção de Eletricidade . . . 15
1.2.3
Disponibilidade de Biomassa no Brasil . . . . . . . . . 16
1.2.4
Considerações . . . . . . . . . . . . . . . . . . . . . . . 18
1.3
Metodologia . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
1.4
Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
1.5
Estrutura da Dissertação
. . . . . . . . . . . . . . . . . . . . 20
2 Biodigestores
2.1
22
Contextualização . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.1.1
Biomassa . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.1.2
Biodigestor . . . . . . . . . . . . . . . . . . . . . . . . 25
vii
viii
2.1.3
2.1.4
Modelos de Biodigestores . . . . . . . . . . . . . . . . . 28
2.1.3.1
Modelo Indiano . . . . . . . . . . . . . . . . . 29
2.1.3.2
Modelo Chinês . . . . . . . . . . . . . . . . . 30
2.1.3.3
Modelo Tubular Solar . . . . . . . . . . . . . 33
2.1.3.4
Matéria-Prima do Biodigestor . . . . . . . . . 35
Biogás . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
2.1.4.1
Panorama do Consumo da Biomassa/Biogás . 40
2.1.4.2
Perspectivas para o Uso de Biodigestores . . . 42
3 Identicação e Métodos de Controle de Sistemas
3.1
44
Controle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
3.1.1
Formas de Controle . . . . . . . . . . . . . . . . . . . . 45
3.1.1.1
3.1.1.2
3.1.1.3
Feedback . . . . . . . . . . 46
Malha de Controle Feedforward . . . . . . . . 48
Controladores Feedback ON-OFF . . . . . . . 48
Malha de Controle
3.2
Identicação de Sistemas . . . . . . . . . . . . . . . . . . . . . 50
3.3
Controlador Centrífugo . . . . . . . . . . . . . . . . . . . . . . 50
3.4
Algoritmo de Controle PID
3.4.1
. . . . . . . . . . . . . . . . . . . 52
Variações do Controle PID . . . . . . . . . . . . . . . . 55
3.4.1.1
PID Ideal . . . . . . . . . . . . . . . . . . . . 55
3.4.1.2
PID Paralelo . . . . . . . . . . . . . . . . . . 56
3.5
Sintonia Para Controladores PID . . . . . . . . . . . . . . . . 57
3.6
Controle de Vazão . . . . . . . . . . . . . . . . . . . . . . . . . 59
3.6.1
3.7
Modelamento da Equação de Bernoulli . . . . . . . . . 60
Controlador Lógico Programável . . . . . . . . . . . . . . . . . 64
3.7.1
Estrutura do CLP
3.7.2
Memória do CLP . . . . . . . . . . . . . . . . . . . . . 65
3.7.3
Linguagens de Programação . . . . . . . . . . . . . . . 66
3.7.3.1
3.7.4
3.7.5
. . . . . . . . . . . . . . . . . . . . 65
Norma IEC 61131-3 . . . . . . . . . . . . . . 67
Interfaces de Comunicação dos CLP . . . . . . . . . . . 68
3.7.4.1
Módulos de Entradas e Saídas Digitais . . . . 68
3.7.4.2
Módulos de Entradas e Saídas Analógicas . . 70
3.7.4.3
Módulo PID
3.7.4.4
Módulos de Interface de Rede . . . . . . . . . 73
. . . . . . . . . . . . . . . . . . 71
Protocolos de comunicação . . . . . . . . . . . . . . . . 77
ix
3.8
Softwares Supervisórios . . . . . . . . . . . . . . . . . . . . . . 79
3.8.1 Supervisórios SCADA . . . . . . . . . . . . . . . . . . 82
3.8.2
Estimadores de Mínimos Quadrados . . . . . . . . . . . 83
3.8.3
Estimadores de Mínimos Quadrados Recursivo . . . . . 84
4 Planta de Produção de Biogás e Eletricidade
87
4.1
Planta de Biogás . . . . . . . . . . . . . . . . . . . . . . . . . 87
4.2
Conjunto Motor/Gerador . . . . . . . . . . . . . . . . . . . . . 90
4.3
Controlador Lógico Programável . . . . . . . . . . . . . . . . . 91
4.4
Atuador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
4.5
Sensores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
4.6
4.5.1
Sensor de Temperatura . . . . . . . . . . . . . . . . . . 93
4.5.2
Sensores de Pressão . . . . . . . . . . . . . . . . . . . . 94
4.5.3
Sensores de Vazão . . . . . . . . . . . . . . . . . . . . . 95
Biodigestor . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
4.6.1
Etapas de Instalação do Biodigestor . . . . . . . . . . . 96
4.6.2
Carga do Biodigestor . . . . . . . . . . . . . . . . . . . 101
4.7
Controle e Monitoramento da Planta de Biogás . . . . . . . . 104
4.8
Dinâmica do Sistema de Controle . . . . . . . . . . . . . . . . 109
5 Ensaios e Resultados
5.1
Ensaios
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
5.1.1
Analise do Biogás do LEA . . . . . . . . . . . . . . . . 111
5.1.2
Dinâmica das Variáveis do Processo . . . . . . . . . . . 111
5.1.3
Dinâmica de Partida do Conjunto Motor/Gerador . . . 115
5.1.4
Controlador Centrífugo com Gasolina . . . . . . . . . . 115
5.1.5
Controlador Centrífugo com Biogás . . . . . . . . . . . 117
5.1.6
Controlador Centrífugo e PI com Biogás . . . . . . . . 119
5.1.6.1
5.1.7
Denição dos parâmetros PI . . . . . . . . . . 119
Controlador PI com Biogás
6 Conclusões
6.1
111
. . . . . . . . . . . . . . . 123
125
Trabalhos Futuros . . . . . . . . . . . . . . . . . . . . . . . . . 127
Apêndice
129
x
A Projetos e Artigos Publicados
129
Referências Bibliográcas
130
Lista de Tabelas
1.1
Unidades Geradoras do Nordeste (16). . . . . . . . . . . . . .
2.1
Proporção de água na matéria seca para biodigestores (56).
2.2
Estimativa de Quantidade x Fontes (55). . . . . . . . . . . . . 36
2.3
Equivalência do biogás (0-60% de CH4 ) (48). . . . . . . . . . . 38
3.1
Sintonia de Ziegler e Nichols para degrau unitário (64). . . . . 58
3.2
Sintonia de Ziegler e Nichols baseada em Kcr e Pcr (64).
3.3
Exemplo de Espaços de Memória dos CLP's (84). . . . . . . . 66
3.4
Especicação da comunicação serial RS232 (83). . . . . . . . . 76
3.5
Especicação da comunicação serial RS422 (83). . . . . . . . . 76
3.6
Especicação da comunicação serial RS485 (83). . . . . . . . . 77
3.7
Principais características entre os níveis de rede (83). . . . . . 79
4.1
Características do conjunto motor/gerador B4T-5000 Bio (90). 91
4.2
Características da válvula Modelo TR24-SR-T US . . . . . . . 92
4.3
Características do sensor de temperatura TN2531 . . . . . . . 93
4.4
Características do sensor de pressão PG2457 . . . . . . . . . . 94
4.5
Características do sensor de vazão SD5000 . . . . . . . . . . . 96
4.6
Cálculo do volume de carga (49). . . . . . . . . . . . . . . . . 102
5.1
Sistema sem Aplicação das Cargas na Partida com Gasolina. . 116
5.2
Sistema com Aplicação das Cargas com Gasolina. . . . . . . . 117
5.3
Sistema controlador centrífugo com biogás com ajuste manual. 118
5.4
Sistema com Aplicação das Cargas com biogás.
5.5
Aplicação das Cargas com Controladores Simultâneos. . . . . . 123
xi
6
. 35
. . . 60
. . . . . . . . 118
Lista de Figuras
1.1
Mapa de integração eletroenergética do Brasil (22). . . . . . . 12
2.1
Ciclo da biomassa e biodigestor (49). . . . . . . . . . . . . . . 27
2.2
Biodigestor modelo indiano (48). . . . . . . . . . . . . . . . . 30
2.3
Biodigestor modelo chinês (48). . . . . . . . . . . . . . . . . . 32
2.4
Biodigestor Modelo Tubular Solar (55). . . . . . . . . . . . . . 34
2.5
Modelo simplicado de obtenção de biogás (56). . . . . . . . . 39
2.6
Perl da matriz energética brasileira em 2009 (61). . . . . . . 41
feedback em um processo (adaptado de (66)). . . . 47
3.2 Controle feedforward em um processo (adaptado de (66)). . . . 49
3.3 Controle de feedback ON-OFF (66). . . . . . . . . . . . . . . . 49
3.1
Controle de
3.4
Sistema de Controle de Velocidade (64). . . . . . . . . . . . . 51
3.5
Esquema do PID ISA (adaptado de (78)). . . . . . . . . . . . 56
3.6
Esquema do PID Paralelo (adaptado de (78)). . . . . . . . . . 56
3.7
Resposta ao degrau unitário em malha aberta (64). . . . . . . 58
3.8
Curva de resposta em forma S (64). . . . . . . . . . . . . . . . 58
3.9
Sistema de malha fechada com controlador proporcional (64). . 59
3.10 Oscilação sustentada com período Pcr (64). . . . . . . . . . . . 59
3.11 Interface de Entradas e Saídas (84). . . . . . . . . . . . . . . . 69
3.12 Conguração de Entrada NPN (83). . . . . . . . . . . . . . . . 70
3.13 Conguração de Entrada PNP (83). . . . . . . . . . . . . . . . 70
3.14 Diagrama PID com raiz quadrada (83). . . . . . . . . . . . . . 72
3.15 Rede de comunicação (83). . . . . . . . . . . . . . . . . . . . . 74
3.16 Níveis de Rede (83). . . . . . . . . . . . . . . . . . . . . . . . 78
4.1
Integração e produtos dos centros de pesquisa. . . . . . . . . . 88
xii
xiii
4.2
Unidade de controle de vazão da planta de biogás. . . . . . . . 89
4.3
Motor/Gerador modelo B4T-5000
4.4
Controlador lógico programável e expansões. . . . . . . . . . . 92
4.5
Válvula proporcional de controle de vazão. . . . . . . . . . . . 92
4.6
Sensor de temperatura TN2531 . . . . . . . . . . . . . . . . . 93
4.7
Sensor de pressão PG2457 . . . . . . . . . . . . . . . . . . . . 94
4.8
Sensor de vazão SD 5000 . . . . . . . . . . . . . . . . . . . . . 95
4.9
Localização do biodigestor no LEA - UFC . . . . . . . . . . . 97
. . . . . . . . . . . . . . . 90
4.10 Dimensões do biodigestor modelo 4500 (em metros). . . . . . . 97
4.11 Sucatas encontradas na escavação . . . . . . . . . . . . . . . . 98
4.12 Trincheira para instalação do biodigestor . . . . . . . . . . . . 98
4.13 Trincheira modelada com as placas pré-moldadas de cimento . 99
4.14 Instalação da manta geotextil. . . . . . . . . . . . . . . . . . . 99
4.15 Teste de vazamentos do biodigestor . . . . . . . . . . . . . . . 100
4.16 Biodigestor semi enterrado . . . . . . . . . . . . . . . . . . . . 100
4.17 Caixa de entrada do biodigestor. . . . . . . . . . . . . . . . . . 101
4.18 Caixa de saída do biodigestor. . . . . . . . . . . . . . . . . . . 101
4.19 Borbulhador da planta de biogás do LEA. . . . . . . . . . . . 102
4.20 Queimador da planta de biogás do LEA. . . . . . . . . . . . . 102
4.21 Abastecimento da caixa de entrada . . . . . . . . . . . . . . . 102
4.22 Transporte do esterco. . . . . . . . . . . . . . . . . . . . . . . 103
4.23 Animais connados da Capril Said. . . . . . . . . . . . . . . . 103
4.24 Biodigestor com biogás.
. . . . . . . . . . . . . . . . . . . . . 104
4.25 Sistema de monitoramento da planta de biogás. . . . . . . . . 105
4.26 Tela de abertura/identicação do usuário. . . . . . . . . . . . 106
4.27 Tela de menu. . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
4.28 Tela do motor e gerador. . . . . . . . . . . . . . . . . . . . . . 107
4.29 Tela de relatório de frequência.
. . . . . . . . . . . . . . . . . 107
4.30 Tela de pressão/vazão. . . . . . . . . . . . . . . . . . . . . . . 108
4.31 Tela de vazão de gás. . . . . . . . . . . . . . . . . . . . . . . . 108
4.32 Tela de acionamento de cargas. . . . . . . . . . . . . . . . . . 109
4.33 Instalação do sensor indutivo. . . . . . . . . . . . . . . . . . . 110
5.1
Composição do biogás - LEA. . . . . . . . . . . . . . . . . . . 112
5.2
Composição do biogás, conforme (41). . . . . . . . . . . . . . . 112
xiv
5.3
Curva de resposta pressão e vazão. . . . . . . . . . . . . . . . 113
5.4
Curva de resposta frequência e pressão. . . . . . . . . . . . . . 113
5.5
Curva de resposta temperatura e vazão. . . . . . . . . . . . . . 113
5.6
Curva de consumo (m3 ) do motor/gerador . . . . . . . . . . . 114
5.7
Curva de frequência sem a aplicação da carga . . . . . . . . . 115
5.8
Curva de frequência do controlador centrífugo com gasolina . . 116
5.9
Curva da frequência com ajuste manual do biogás. . . . . . . . 117
5.10 Curva de frequência do controlador centrífugo com biogás. . . 119
5.11 Curva de resposta frequência e vazão. . . . . . . . . . . . . . . 120
5.12 Curva da vazão real e vazão estimada pelo MQR. . . . . . . . 120
5.13 PID paralelo
Matlab-Simulink r . . . . . . . . . . . . . . . . . . 121
5.14 Resposta do PID paralelo ao degrau. . . . . . . . . . . . . . . 121
5.15 Parametrização do bloco PID paralelo. . . . . . . . . . . . . . 122
5.16 Curva de frequência dos controladores simultâneos com biogás. 122
5.17 Curva de frequência do controlador PI com biogás. . . . . . . 124
Lista de Abreviaturas
LEA
PCH
CGH
UNICA
SINERGIA
ST
SV
DQO
IPqM
CEAM
ENE
EPA
UASB
IICA
REN21
ESALQ
NEMA
IEC
MMI
SCADA
MIS
CLP
ISA
PID
Laboratório de Energias Alternativas
Pequenas Centrais Hidrelétricas
Centrais Geradoras Hidrelétricas
União da Indústria de Cana-de-Açucar
Sindicato dos Eletricitários
Sólidos Totais
Sólidos Voláteis
Demanda Química de Oxigênio
Instituto de Pesquisas da Marinha do Brasil
Companhia Energética do Amazonas
Estratégia Nacional para Energia
United States Environmental Protection Agency
Upow Anaerobic Sludge Blanket
Instituto Interamericano de Cooperação para a Agricultura
Renewable Energy and Policy Network for the 21st
Escola Superior Agrícola Luiz Queiroz
National Electrical Manufacturers Association
International Electrotechnical Commission
Man Machine Interface
Supervisory Control And Data Acquisition
Memória Intermediária de Saída
Controlador Lógico Programável
Industry Standard Architeture
Proporcional-Integral-Derivativo
xv
Capítulo 1
Introdução
1.1 Contextualização
A disponibilidade de energia elétrica é bastante desigual no mundo. A
grande maioria da população mundial vive em áreas onde o atendimento é
precário. Parte dela habita em áreas isoladas onde o atendimento por meio
da extensão da rede convencional é impossível por motivos naturais, como
distância, diculdade de acesso, localização dentro de reservas ambientais,
áreas insulares ou montanhosas,clima rigoroso (1).
O setor elétrico nacional apresenta perl bastante peculiar e distinto,
pois é predominado pela geração hidroelétrica, constituída de usinas e reservatórios de grande porte. As usinas estão localizadas em diferentes bacias
hidrográcas, entretanto, há uma forte interdependência entre elas. Em uma
mesma bacia há usinas hidroelétricas de diferentes empresas. Como o uxo
de água é variável e depende do nível pluviométrico anual, usinas térmicas
operam de forma complementar.
Com o aumento do consumo de energia, aliado aos poucos investimentos
realizados no setor, por conta da situação decitária das contas externas, o
fornecimento de eletricidade cou comprometido, uma vez que não foi possível realizar uma expansão necessária do setor que acompanhasse a expansão
da demanda por energia (2) e (3). Além disso, o aumento da intensidade
de uso de energia elétrica na indústria brasileira, em virtude do processo de
2
modernização (3) e (4), e do uso residencial (5), que pode ser comparado em
muitos aspectos com os padrões observados em países desenvolvidos como
Áustria, Dinamarca, Alemanha, Holanda e Estados Unidos (6), se tornou
um problema difícil de solucionar sem uma ação incisiva de planejamento de
longo prazo e investimentos.
No início de 1995, o setor elétrico brasileiro vivia uma situação de quase
falência, com obras paradas e falta de investimentos. Nada menos que 56
obras em usinas geradoras tinham sido interrompidas em todo o País. O setor elétrico estava diante de uma grave crise, com riscos de décit de energia
crescentes que poderiam comprometer o pleno atendimento de mercado e,
consequentemente, inviabilizar o desenvolvimento econômico do País. Predominava a presença do Estado nesse setor vital da economia. As tarifas
estavam fora da realidade. Os recursos eram insucientes para cobrir os custos e nanciar a expansão e a melhoria da oferta de energia para as famílias
de consumidores e para as empresas. O Governo Federal começou então a
fazer mudanças, inadiáveis naquela época, dentre elas aumentar a oferta de
energia por meio do incentivo a novos investimentos, especialmente os do setor privado e diversicar a origem da geração de energia no País, fortemente
baseada nas usinas hidrelétricas (7).
Sob esse contexto, o Governo Brasileiro decidiu implementar diversas mudanças no setor elétrico. O processo de privatização das empresas de distribuição de energia elétrica teve início em 1995. Em 1996, foi criada a Agência
Nacional de Energia Elétrica (ANEEL), com vistas a monitorar e homogeneizar as atividades do setor (8).
O Governo Federal lançou em novembro de 2003 o desao de acabar com
a exclusão elétrica no país. Foi o Programa "Luz Para Todos", que teve a
meta de levar energia elétrica para mais de 10 milhões de pessoas do meio
rural até o ano de 2008, onde a previsão de investimentos foi de R$ 20 bilhões.
Nesse programa, o Governo Federal participaria com R$ 14,3 bilhões provenientes de fundos setoriais de energia e o restante seria partilhado entre
governos estaduais e as empresas de energia elétrica. No balanço divulgado
de 2009, após oito anos do programa mostra que 90% da meta de 2010, que
é de 2,6 milhões de famílias atendidas, foi alcançada e desde sua criação até
3
novembro de 2010, mais de 13 milhões de pessoas foram beneciadas com
luz elétrica nas suas casas. A expectativa do programa foi de que até abril
de 2011 a previsão seriam integralmente cumprida, mas o programa foi novamente prorrogado, agora para ser nalizado em 2011, para possibilitar que
as obras contratadas até outubro de 2010 sejam realizadas (9).
Nos estados da Bahia, Pará, Maranhão e Minas Gerais foram feitas mais
de 1 milhão de ligações elétricas, sendo o estado baiano o que apresentou
o maior número de pessoas atendidas (2,13 milhões). Do total de R$ 14,3
bilhões para o programa, foram liberados R$ 9,2 bilhões (9).
O mapa da exclusão elétrica no país, em 2010, revela que as famílias sem
acesso à energia estão majoritariamente nas localidades de menor Índice de
Desenvolvimento Humano e nas famílias de baixa renda. Cerca de 90% destas
famílias têm renda inferior a três salários mínimos e 80% estão no meio rural
(9).
1.1.1 Sistemas Centralizados de Geração Elétrica no Brasil
As empresas de distribuição de energia elétrica foram estruturadas sob a
forma de monopólios e passaram a ser reguladas com o objetivo de se evitar exploração monopolista dos consumidores, resguardando, contudo, uma
remuneração adequada para os investidores (10).
Até 1999, o Brasil possuía vários sistemas elétricos desconectados, o que
impossibilitava uma operação eciente das bacias hidrográcas regionais e da
transmissão de energia elétrica entre as principais usinas geradoras, por outro
lado, existia uma concentração de demanda em localidades industrializadas
distantes das centrais de geração de energia elétrica. Estas características foram imperativas para a implantação de um sistema de transmissão de longa
distância. Com o objetivo de ampliar a conabilidade, otimizar os recursos
energéticos e homogeneizar mercados foi criado o Sistema Interligado Nacional - SIN, o qual é responsável por mais de 95% do fornecimento nacional.
Sua operação é coordenada e controlada pelo Operador Nacional do Sistema
4
Elétrico - ONS.
Em termos de uso nal, a energia elétrica é o principal componente da
matriz energética brasileira, sendo responsável por cerca de 39%, enquanto os
derivados de petróleo contribuem com 31% e as outras fontes (nuclear, carvão,
biomassa, eólica, solar), são responsáveis por apenas 30% (11). Segundo (12),
no período de 1994 a 2001, as usinas usaram mais água para gerar energia do
que receberam de chuvas. De 1991 a 2001, o consumo de eletricidade cresceu
4,1% e a capacidade de produção 3,3%, em média, ao ano. A defasagem
entre o crescimento da oferta e da demanda é superior a 10% nessa década.
De acordo com dados do Banco de Informações de Geração da Agência
Nacional de Energia Elétrica - BIG/ANEEL, a capacidade instalada total
do sistema elétrico brasileiro em Dezembro 2009, englobando as unidades geradoras do Sistema Interligado Nacional - SIN e também aquelas instaladas
nos sistemas isolados, bem como a autoprodução (geração de energia elétrica
instalada no local do consumo) era de cerca de 112.500 MW (13). A hidroeletricidade, historicamente predominante na matriz brasileira, representava, no
nal de 2009, 71% da capacidade, com 165 empreendimentos com potência
de 74.484,24 MW, contra 73% em 2008. A queda foi superada pela expansão
de todas as outras fontes, com exceção da termonuclear, que caiu de 1,96%
para 1,89%. As demais fontes de geração termoelétricas, tiveram a sua participação aumentada de 22,18% para 23,59% do total, divididos entre 1.313
usinas com capacidade de 25.081,35 MW. A geração por pequenas centrais
hidrelétricas (PCH), cuja capacidade instalada é superior a 1 MW e inferior
a 30 MW e centrais geradoras (CGH), que possui potencial hidráulico igual
ou inferior a 1 MW, subiu de 2,54% para 2,94% em 2009, na comparação
com o ano anterior, enquanto a geração eólica subiu de 0,33% para 0,57%
(14).
O sistema centralizado implementado diretamente após a criação da Eletrobrás, não era apenas considerado como o modelo mais eciente em termos
técnicos e econômicos, mas também se ajustava ao modelo de crescimento impulsionado pelo estado que prevaleceu no Brasil, quando o país fez a transição
de uma economia agrícola de exportação para uma economia industrializada.
O Brasil também desenvolveu um sistema de subsídio de tarifas, que visava
5
baratear a energia elétrica para as indústrias, repassando o custo residual aos
domicílios dos consumidores e a outras empresas fora do setor industrial.
A maior parte da capacidade instalada é composta por usinas hidrelétricas, que se distribuem em 12 diferentes bacias hidrográcas nas diferentes
regiões do país de maior atratividade econômica. São os casos das bacias
dos rios Tocantins, São Francisco, Paranaíba, Grande, Paraná, Tietê, Paranapanema, Iguaçu, Uruguai e Jacuí onde se concentram as maiores centrais
hidrelétricas.
Pouco menos de 60% da capacidade hidrelétrica instalada no Brasil está
na Bacia do Rio Paraná. Outras bacias importantes são a do São Francisco
e a do Tocantins, com 16% e 12%, respectivamente, da capacidade instalada no País. As bacias com menor potência instalada são as do Atlântico
Norte/Nordeste e Amazonas, que somam apenas 1,5% da capacidade instalada no Brasil (15), que deve aumentar, até 2019, a capacidade com a
implantação das hidrelétricas de Belo Monte (PA), Ferreira Gomes (AP),
Santo Antonio (AP), Jirau (RO), Rondon II (RO), Santo Antonio (RO).
Segundo (14) a operação da primeira unidade da Usina Hidrelétrica de
Belo Monte, que será a terceira maior do mundo, está prevista para Fevereiro
de 2015. A capacidade total instalada da usina será de 11.233,1 MW, com
garantia assegurada de 4,571 mil MW médios. A usina vai operar a o
d'água. Isso signica que a geração vai variar de acordo com a quantidade de
água do Rio Xingu a cada período do ano. A UHE Belo Monte vai integrar
o Sistema Interligado Nacional (SIN) e, com isso, sua energia vai contribuir
para expansão da oferta em todo o País (14).
A expansão, segundo (14) , ocorre também em outras regiões com a implantação das hidrelétricas de Colider (MT), Dardanelos (MT), Mauá (PR),
Garibaldi (SC), Passo São João (RS), São José (RS), São Domingos (MS) e
Simplício (RJ/MG) no período de 2011 a 2019.
Na Bacia do São Francisco, destaca-se a sub-bacia 49 (rios São Francisco,
Moxotó e outros), onde estão localizadas as usinas hidrelétricas de Xingó e
Paulo Afonso IV, que somam juntas 5.624 MW de potência instalada (16).
Na Tabela 1.1 é mostrado as unidades geradoras de energia elétrica do
6
Nordeste que se destacam.
Tabela 1.1: Unidades Geradoras do Nordeste (16).
Unidade Geradora
Apolônio Sales (Moxotó)
Paulo Afonso I
Paulo AfonsoII
Paulo Afonso III
Paulo Afonso IV
Piloto
Pedra
Sobradinho
Xingó
Araras
Boa Esperança
Camaçari
Coremas
Funil
Luiz Gonzaga
Potência Instalada
400.000 kW
180.001 kW
443.000 kW
794.200 kW
2.462.400 kW
2.000 kW
160.000 kW
1.050.300 kW
3.162.000 kW
4.000 kW
237.300 kW
346.803 kW
3.520 kW
30.000 kW
1.479.600 kW
Local
Delmiro Gouveia/AL
Paulo Afonso/BA
Paulo Afonso/BA
Paulo Afonso/BA
Paulo Afonso/BA
Paulo Afonso/BA
Jequié/BA
Sobradinho/BA
Divisa AL/SE
Varjota/CE
Guadalupe/PI
Dias DÁvila/BA
Coremas/PB
Ubaitaba/BA
Luiz Gonzaga/PE
O Sistema Elétrico Brasileiro adotado, caracteriza-se pelo aproveitamento
do potencial hidrológico que em combinação com as características de relevo
possibilitam a utilização de usinas hidrelétricas, as quais são hoje responsáveis por cerca de 80% da potência elétrica disponibilizada ao país (11). Este
tipo de produção de energia elétrica necessita de grandes investimentos, com
enormes instalações e longas linhas interligadas de distribuição que, em muitos países, opera com o regime de monopólio resultante da necessidade de
expandir a rede elétrica ao maior número de clientes possível.
Através dos dados publicado no Balanço Energético Nacional (BEN) de
2009 do Ministério de Minas e Energia, pode-se concluir que tanto a oferta
quanto a demanda de energia elétrica cresceu nos últimos anos, porém a
demanda esteve bem próxima da oferta. Em 2008, a diferença entre a oferta
e a demanda foi apenas 13,6%. Isto signica que o Brasil não tinha grande
excedente de energia elétrica, sendo portanto necessário diversicar a matriz
energética, além de descentralizar e incentivar a geração de energia elétrica
através de fontes alternativas no País.
7
1.1.2 Fontes Alternativas e Sistemas Descentralizados
1.1.2.1 Panorama Internacional
O fornecimento de energia elétrica em comunidades rurais isoladas e áreas
remotas tem sido um constante desao, principalmente nos países subdesenvolvidos ou em desenvolvimento, devido às enormes disparidades econômicas
e sociais e, muitas vezes, às dimensões geográcas desses países. Há algum
tempo, os sistemas de suprimento de energia alternativa descentralizados,
utilizando recursos renováveis, têm sido empregados no atendimento a comunidades mais isoladas. Vários tipos desses sistemas têm sido estudados,
mostrando-se economicamente viáveis em muitos países.
• Estados Unidos
Segundo país que mais investiu em energias renováveis em 2009 (US$
18,6 bilhões), possui a maior capacidade instalada total, com 53,4 GW provenientes de fontes renováveis, dos quais 31,9 GW de energia eólica. É líder
no consumo e produção de etanol (47 bilhões de litros) e apresenta meta de
elevar tal número para 136 bilhões de litros até 2022 (17).
• Alemanha
A Alemanha, por exemplo, provou como o uso das fontes renováveis pode
ser útil ao Estado, à população e ao meio-ambiente. O país é responsável
por cerca de um terço de toda a energia eólica instalada no mundo, representando metade da potência gerada em toda a Europa. O investimento em
tecnologia também permitiu aos germânicos se destacarem na utilização de
combustíveis de origem vegetal (biomassa). Na última revisão da Lei de Renováveis, datada de 2004, as metas de participação das renováveis na matriz
alemã foram revistas para 12,5% em 2010 e 20% em 2020. O país é o atual
líder mundial em termos de capacidade instalada em energia solar (7,7 GW)
e terceiro maior em energia eólica (25,7 GW). Possui 29% de sua matriz de
energia elétrica baseada em fontes renováveis, com 36,2 GW instalados até
2009 (17).
8
• Espanha
Apesar de uma matriz energética fundamentada na energia hidrelétrica, a
Espanha iniciou o desenvolvimento de energias renováveis apenas após a crise
do petróleo dos anos 70. Este desenvolvimento foi motivado principalmente
pela necessidade de diversicação e descentralização da matriz elétrica e para
reduzir a dependência de importações de energia.
Em 2000, foi criado o Plano para a Promoção de Energias Renováveis na
Espanha, que previa a participação de 12% das fontes renováveis na matriz
energética e 29,4% na geração elétrica até 2010. Dividido em duas fases,
primeiro de 2000 a 2006, em seguida de 2006 a 2010, o plano foi responsável
por uma considerável expansão da geração eólica no país, apesar de não ser
especíco sobre a duração do apoio ao sistema tarifário.
• China
Liderou os investimentos em energias renováveis em 2009 com US$ 32,6
bilhões, atingindo 52,5 GW de capacidade instalada, dos quais 26 GW provenientes da fonte eólica, devendo alcançar entre 100 e 150 GW instalados
até 2020. Principal produtor de painéis fotovoltaicos do planeta, com mais
de 50 empresas atuando no setor (17).
• Reino Unido
Apesar de gerar a maior parte de sua energia a partir de térmicas a carvão
e gás natural e usinas nucleares, o Reino Unido possui o melhor potencial de
energia eólica da Europa. O ainda baixo aproveitamento das renováveis não
se deveu à falta de apoio político e sim a esquemas de incentivo inadequados. O primeiro deles aconteceu em 1989, quando o
Electricity Act (Lei da
Eletricidade) privatizou o setor elétrico e ofereceu apoio à geração renovável,
e também à geração nuclear, pela
Non-Fossil-Fuel Obligation (NFFO) ou
Obrigação de Combustíveis Não-Fósseis. Em 2007 foram instalados 427 MW
e o Reino Unido tem uma capacidade instalada em energia eólica de 2.389
MW, a nona maior do mundo. A meta do governo para a energia renovável é
9
uma participação de 15% na matriz elétrica em 2015, aumentando para 20%
em 2020 (18).
• Índia
Grande produtor de energia elétrica através de energia eólica (10,9 GW) e
também em PCHs (2,5 GW). Com relação à energia solar fotovoltaica (FV),
o país apresenta metas ambiciosas de instalar 20 GW até 2022 (17).
A capacidade instalada da Índia de geração de energia elétrica foi de
123.901 MW, em 31 de Janeiro de 2006. As fontes que contribuiram para
essa geração foi hidro, térmico, nuclear e renováveis que correspondem a
26,0%, 66,4%, 2,7% e 4,9%, respectivamente. Considerando que cerca de
20% das 593.732 aldeias ainda estão para serem eletricados, apenas cerca
de 44,0% das famílias rurais têm acesso à eletricidade fornecida. A previsão
do governo da Índia é eletricar vilarejos remanescentes e todas as casas até
2012. O foco deste programa é, principalmente, a implantação do projeto de
gaseicação de biomassa de energia e de projetos de micro hidrelétricas (19).
• França
Embora não seja um dos maiores produtores de energia elétrica com a
utilização de energias renováveis, apresenta 4,5 GW de energia eólica instalados e apresenta metas relevantes para a participação das fontes renováveis
em sua matriz de energia elétrica em 10% até 2020, e consumo total de
biocombustíveis também em 10% até 2020 (17).
• Portugal
A Resolução do Conselho de Ministros n.o 54/2010 estabelece que Portugal deve assegurar a posição entre os cinco líderes europeus ao nível dos
objetivos em matéria de energias renováveis em 2020. Foi aprovada a Re-
solução do Conselho de Ministros n.o 29/2010, de 15 de Abril, que aprova
a Estratégia Nacional para a Energia 2020 (ENE 2020). A ENE 2020 tem
como principais objetivos reduzir a dependência energética do País, garantir o cumprimento dos compromissos assumidos por Portugal no contexto
10
das políticas européias de combate às alterações climáticas, reduzir em 25%
o saldo importador energético com a energia produzida a partir de fontes
renováveis.
A presente resolução determina um conjunto de medidas que visam criar
um enquadramento para a atividade de miniprodução descentralizada de
energia, de modo que esta forma de produção de energia, à semelhança da
microgeração, constitua um signicativo contributo para o cumprimento das
metas estabelecidas na ENE 2020.
Entre as diversas medidas que compõem a resolução deve destacar-se
o lançamento de programas especícos de miniprodução para permitir que
determinadas entidades como as escolas, os mercados abastecedores, o setor
público estatal, as autarquias, as instituições particulares de solidariedade
social, possam produzir energia de forma descentralizada, e que esta forma
de produção de energia atinja, progressivamente, uma quota de produção de
500 MW até 2020 (20).
• Japão
País pioneiro e dos mais voltados à promoção de eciência energética,
também apresentava, em 2009, 12,9 GW provenientes de fontes renováveis,
com destaque para Biomassa (3,1 GW) e Solar FV (1,7 GW) (17).
• Coréia do Sul
Até 2009 não apresentava grande destaque na utilização de energia descentralizada com fontes renováveis em sua matriz energética, mas foi um dos
países a dedicar maior parcela de seu pacote de recuperação à crise econômica para investimentos verdes. Possui metas para energia eólica (2,25 GW)
e solar (1,3 GW) até 2011 (17).
1.1.2.2 Panorama no Brasil
O setor elétrico do Brasil conta com grandes usinas hidrelétricas responsáveis pela geração da eletricidade consumida pelas regiões mais desenvolvidas
11
do país. Porém para atender a demanda de regiões distantes dos grandes centros, como as comunidades isoladas da Região Norte, a relação custo benefício
torna-se desvantajosa devido ao transporte da energia. Com este cenário, a
geração descentralizada torna-se uma alternativa.
O sistema de transmissão de energia elétrica brasileiro é dividido em 2 subsistemas: o interligado e o isolado. O sistema interligado tem uma capacidade
instalada de 109.343 MW e é eminentemente hídrico, formado principalmente
por grandes centrais hidrelétricas e, mais recentemente, por centrais térmicas
à gás, que atendem a grande maioria do território nacional correspondendo
a 98% do mercado consumidor. O sistema importa energia elétrica, principalmente do Paraguai, que é o detentor da metade da capacidade de Itaipú,
em torno de 8.170 MW, e conta com 84.494 km de linha de transmissão. O
sistema isolado, que abrange a região da Amazônia legal, é composto por vários sistemas de geração, transmissão e de distribuição, não conectados entre
si, atendendo os principais centros consumidores, com grandes e pequenas
unidades de geração à diesel, ou a óleo combustíveis. Corresponde a 2% do
mercado nacional, tem uma potência instalada de 2.953 MW, com 2.608 km
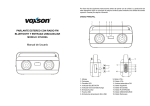
de linhas de transmissão e importa 200 MW da Venezuela. (21). Na Figura
1.1 é mostrado o mapa de integração eletroenergética do Brasil (22).
Do ponto de vista econômico, as comunidades isoladas se caracterizam
pela baixa renda e pouco consumo de energia, se constituindo em mercados
pouco atrativos para as concessionárias face aos grandes investimentos necessários para o atendimento sem perspectivas de retorno nanceiro. Para
atendimento destas comunidades, a utilização de sistemas isolados que gerem energia a partir de fontes renováveis tem se tornado uma solução viável.
Estes podem ser do tipo individual, onde cada unidade consumidora possui
um gerador independente; ou centralizado, onde as unidades consumidoras
são atendidas por meio de uma mini-rede de distribuição. Os sistemas centralizados são mais robustos do que os individuais por serem mais facilmente
controlados, além de terem custos de operação e manutenção reduzidos. São
geralmente compostos de fontes renováveis diferentes, e por isto, chamados de
sistemas híbridos. Combinam as características complementares das fontes,
aproveitando as peculiaridades de cada fonte utilizada. (23).
12
Figura 1.1: Mapa de integração eletroenergética do Brasil (22).
Por ocasião do lançamento do Programa Luz para Todos instituido pelo
Decreto n.o 4.873, de 11 de novembro de 2003, alterado pelo Decreto n.o
6.442, de 25/04/2008. A meta de levar energia elétrica para mais de 10
milhões de pessoas do meio rural até o ano de 2008 foi atingida em maio de
2009.
Até a implantação do programa, o mapa da exclusão elétrica no país
revelava que as famílias sem acesso à energia estavam majoritariamente nas
localidades de menor Índice de Desenvolvimento Humano e nas camadas de
baixa renda.
Os Sistemas Isolados são predominantemente abastecidos por usinas térmicas movidas a óleo diesel e óleo combustível embora também abriguem pe-
13
quenas centrais hidrelétricas (PCH), centrais geradoras hidrelétricas (CGH)
e termelétricas movidas a biomassa. Estão localizados principalmente nos
Estados de Amazonas, Roraima, Acre, Amapá e Rondônia. São assim denominados por não estarem interligados ao SIN e por não permitirem o intercâmbio de energia elétrica com outras regiões, em função das peculiaridades
geográcas da região em que estão instalados. Segundo dados da Eletrobrás,
esses sistemas atendem a uma área de 45% do território brasileiro e a cerca
de 3% da população nacional e aproximadamente 1,3 milhão de consumidores
espalhados por 380 localidades. Em 2008, respondiam por 3,4% da energia
elétrica produzida no país. Os sistemas isolados de maior porte suprem as
capitais Rio Branco (AC), Macapá (AP), Manaus (AM) e Porto Velho (RO)
e o estado de Roraima (com exceção da capital Boa Vista e seus arredores,
abastecidos pela Venezuela). Manaus tem o maior deles, com 50% do mercado total dos sistemas isolados(15).
De acordo com o Banco de Informações de Geração da Agência Nacional
de Energia Elétrica (Aneel), em Julho de 2011 existem 410 termelétricas
movidas a biomassa no país, que correspondem a um total de 8,3 mil kW
instalados. Do total de usinas relacionadas, 14 são abastecidas por biogás
(70.022 kW)(24).
1.1.3 Diculdades na Geração Descentralizada
Uma das diculdades para a implantação de sistemas de geração descentralizados com redes ou individuais consiste na falta de uma regulamentação
especíca que garanta a qualidade do atendimento (25).
Para implantação de pequenas unidades geradoras de energia, o custo de
implantação é um aspecto relevante. No sistema de geração de eletricidade
com o biogás, quando são utilizadas pressões elevadas, como as citadas por
(26), utiliza-se, obrigatoriamente, equipamentos e peças mais resistentes, que
são normalmente onerosas, acarretando diculdade à implantação de sistemas
de pequeno porte em regiões isoladas e com população com baixa renda.
Portanto, são necessários estudos sobre a utilização de equipamento de
menor porte, como por exemplo o sistema de controle de vazão do biogás
14
com baixa pressão a m de viabilizar sua utilização em propriedades rurais
e agroindústrias produtoras de biogás, fazendo com que o produtor agregue
valor a seus produtos agrícolas.
1.2 Motivação
1.2.1 Redução da Poluição Ambiental
A produção de energias renováveis e eciência energética são hoje reconhecidas como áreas de pesquisas mais discutidas no meio acadêmico. Os esforços
cientícos e desenvolvimento tecnológico, nos últimos 20 anos, desencadeiam
ações direcionadas à necessidade de práticas sustentáveis de aproveitamento
da natureza e a consequente redução sensível no custo da energia nal obtida
a partir destas fontes.
De acordo com (27), vários estudos têm demonstrado que gerenciar a
poluição urbana e industrial concentrando-se no tratamento
end-of-pipe, ou
seja, utilizando-se de métodos corretivos, em muitos dos casos não é só custoso como também insustentável. Experiências dos Estados Unidos e outros
países desenvolvidos têm demonstrado que, a longo prazo, a prevenção da
poluição através da minimização de resíduos e de uma produção de energia
com tecnologias mais limpas e ecientes, é mais sensata tanto na relação
custo-benefício, como também para o próprio meio ambiente, se comparando
com as técnicas tradicionais.
O aproveitamento energético do biogás reduz a emissão de metano para
a atmosfera, contribuindo para a redução do efeito estufa. De acordo com
estimativa da EPA (United
States Environmental Protection Agency ), o gás
metano (CH4 ) é responsável por 23% do aquecimento global. Sua contribuição só não é maior que a do gás carbônico (CO2 ) responsável por 70% do
total.
Em Portugal, as normas relativas aos aterros sanitários impõem, hoje em
dia, a drenagem, a extração, o aproveitamento e, caso este não seja possível,
a queima do biogás, em particular porque o metano é um gás que também
15
contribui para o efeito estufa, com um impacto 20 vezes superior ao gás carbônico. Desta forma, o biogás gerado nos aterros sanitários deve ser drenado
e queimado para minimização dos efeitos causados pelo seu lançamento na
atmosfera (28).
As fontes renováveis de energia: solar, eólica, geotérmica, biomassa, dos
oceanos e pequenas centrais hidroelétricas (PCH), caracterizam-se por impactos ambientais muito menores que o uso dos combustíveis fósseis.
1.2.2 Custos de Manutenção e Produção de Eletricidade
A elevação crescente dos preços do petróleo torna-se cara a utilização de
combustíveis líquidos de natureza fóssil nas regiões rurais para produção de
eletricidade. A utilização de energia elétrica no meio rural também enfrenta
problemas, especicamente em países como o Brasil, onde as distâncias são
muito grandes, fazendo com que os preços dos materiais elevem sobremaneira
o investimento das redes de eletricação.
Segundo (29), os altos custos das redes de distribuição rural são um dos
principais motivos para os baixos índices de eletricação rural no Brasil e,
portanto, a redução dos custos de construção de redes é uma condição essencial para prover energia à regiões rurais vastas e com baixa densidade
demográca.
Outra questão importante é a manutenção corretiva da rede elétrica, que
também aumenta o custo operacional dessa, em regiões remotas (30). Paralelamente, o planejamento energético brasileiro foi feito de forma centralizada
durante décadas, gerando dependência das áreas rurais em relação aos centros de decisão. Contudo, a proximidade do território brasileiro da linha do
Equador, região de alta produção de biomassa e de vocação pecuária e agrícola, abre as possibilidades de complementação desta matriz energética com a
produção de biogás a partir de biomassa originada de detritos agropecuários
para energizar o meio rural brasileiro.
O estudo desenvolvido por (31), em 2003, avaliou o potencial de produção de energia elétrica através do biogás, na região do meio oeste catarinense,
16
concluiu que o consumo médio de energia nas propriedades foi de (600 a 1.800
kWh/mês). Tomando como base apenas a criação de suínos, (produção média de 50 m3 de biogás/dia), teoricamente a capacidade de gerar eletricidade
por propriedade era aproximadamente 2.160 kWh/mês. Com esta produção,
as propriedades poderiam se tornar auto-sucientes em energia elétrica, adotando um sistema que seria capaz de gerar 25 KVA/h de potência elétrica.
Segundo estimativas nesse ano, o empreendimento passaria ser viável economicamente quando a propriedade possuisse capacidade de produção de 200
m3 /dia de gás, o que geraria uma produção aproximada de 300 kVAh/dia.
Um estudo realizado do custo de geração de energia elétrica através do
sistema de gaseicação do caroço de açaí na região amazônica, mostrou que
o custo foi de R$ 0,23 / kWh, o que representa quase um terço do custo de
geração de energia a partir de uma planta a diesel e que o custo do kWh
cobrado na zona rural pela Companhia Energética do Amazonas - CEAM foi
de R$ 0,20, é pouco inferior ao custo encontrado para o sistema de gaseicação
testado. Considerando os níveis elevados de aumentos tarifários que vem se
vericando se pode armar que a tecnologia de gaseicação, nas condições
postas, se apresentava como uma alternativa extremamente competitiva (32).
1.2.3 Disponibilidade de Biomassa no Brasil
Os sistemas modernos de bioenergia são importantes contribuintes para
sistemas energéticos sustentáveis e desenvolvimento sustentável. A biomassa
é uma opção atrativa para a mitigação das mudanças climáticas no setor
energético porque é relativamente barata e pode ser utilizada para produzir
eletricidade, assim como combustíveis líquidos, gasosos e sólidos renados
(33).
Nas regiões Norte e Nordeste, segundo dados da União da Indústria de
Cana-de-Açúcar (UNICA), foram moídas 64 milhões de toneladas de cana-deaçúcar na safra 2008/2009, correspondente a 11% do total do País e apresentou sua maior produção, ao longo do período analisado, na safra de 2007/2008
com 64,6 milhões de toneladas e a menor produção foi observada na safra de
1993/94, com 34,1 milhões de toneladas. O potencial teórico total da região
17
está estimado em 120,3 MW(34).
Em 2009, a colheita de babaçu na região Nordeste que ocorre nos estados
do Maranhão, Piauí e Bahia foram de 102.777 ton, 5.250 ton e 335 ton
respectivamente, apresentando a maior produção em 1987 com 161.600 ton
de amêndoas, equivalentes a 81% da produção nacional (no total o Brasil
apresentou uma produção de 197.396 ton)(35).
A região Nordeste é a grande produtora de castanha de caju (em casca).
O maior produtor é o Ceará, onde de acordo com o sindicato das indústrias
de beneciamento de castanha de caju - SINDICAJU, registrou, na safra de
2009/2010, a produção de 104.421 mil toneladas de castanha de caju, seguido
pelo estado do Rio Grande do Norte com 48.918 ton e Piauí com 42.963 ton.
O potencial da casca de castanha de caju é estimado em 12,76 MW, com
ênfase para o Norte Cearense (3,08 MW)(36).
Os mais importantes resíduos gerados pela atividade biológica são os do
gado bovino, suíno, caprino e ovino, que são criações relevantes e justicariam
seu aproveitamento energético. A criação de caprinos é um sistema produtivo
praticado no Brasil e que está concentrado no semi-árido nordestino, cerca
de 90% do rebanho nacional está na região Nordeste. Outras criações em
destaque no Nordeste e que justicam seu aproveitamento energético são:
bovino 13,8%, Equino 25%, suino 16,5%, ovino 57% e galinhas 19,3% (35).
A instalação de usinas de produção de energia em aterros, também chamadas de Unidades de Reciclagem Energética de Resíduos Sólidos Urbanos
(UREs), já é realidade em vários países do mundo. Já existem em funcionamento cerca de 700 delas ao redor do globo, enquanto ainda não há
nenhuma em funcionamento no Brasil (37). Um estudo da Associação Brasileira de Empresas de Limpeza Pública e Resíduos Especiais (Abrelpe) listou
as cidades brasileiras com mais de 500 mil habitantes e mostrou que o país
produziu 57 milhões de toneladas de resíduos sólidos somente em 2009.
O lixo das 300 maiores cidades brasileiras poderia produzir 15% da energia elétrica total consumida no país. A estimativa consta no Plano Decenal
de Produção de Energia 2008/2017 e considera todo o lixo recolhido nestes
municípios (13). Segundo o coordenador de Energia e Comunicações da Se-
18
cretaria estadual de Infraestrutura (Seinfra)do Governo do Estado do Ceará,
a possibilidade de produção de energia através do lixo nos atuais aterros espalhados pelo Estado no Ceará é estimada de 10 a 12 (MW) de energia (o
suciente para atender 25 mil habitantes)(37).
1.2.4 Considerações
No Brasil, a elevada população e sua concentração em grandes centros
urbanos e a expressiva produção agropecuária e agroindustrial indicam um
potencial signicativo de produção de biogás no interior do País através dos
materiais orgânicos e excrementos animais. O alcance de um programa de
substituição de fontes de energia por biogás pode ser avaliado tomando-se a
produção dos 7,2 milhões de biodigestores instalados na China até dezembro
1979, que tem um valor energético equivalente a cinco "Itaipus"ou 48 milhões
de toneladas de carvão mineral (38).
O Brasil dispõe de condições climáticas favoráveis para explorar a energia
derivada dos dejetos animais e restos de cultura e dispensar o gás de bujão e
o combustível líquido (querosene, gasolina, óleo diesel) para o homem urbano
(ou rural) aliviando, com isso, o país de uma signicativa parcela de importação de derivados do petróleo. Os resultados apresentados numa pesquisa,
revelam um potencial de produção de biogás superior a 50 milhões de m3
CH4 por dia (39).
Como foi citado anteriormente, o Governo Federal está implantando o
projeto de expansão de oferta de energia elétrica que será nalizado em 2019.
Porém, caso o país consiga nos próximos anos atingir um nível de crescimento
econômico acima da média recente, provavelmente a oferta de energia elétrica
será praticamente igual a demanda, já que a instalação de novas hidrelétricas
demanda vários anos para sua conclusão.
Desta forma, para que o Brasil promova políticas públicas baseadas na
sustentabilidade é importante diversicar sua matriz energética e ampliar
o uso de outras fontes de energia renovável abundantes no país, como por
exemplo o biogás.
19
1.3 Metodologia
A presente dissertação encontra-se inserida em um contexto pouco explorado no Brasil. Envolve diversos conceitos, como aspectos técnicos de
engenharia agronômica, química, elétrica, mecânica e automação, além de
aspectos econômicos e sócio-ambientais da implantação de uma planta de
produção de biogás através de biodigestor em regiões remotas.
O presente estudo foi conduzido, primeiramente, mediante investigação
do estado da arte mundial sobre tecnologias de produção de biogás (biodigestores) e matéria prima utilizada. Em seguida, foi realizada a instalação
da planta de produção de biogás com biodigestor tipo tubular com sistema
automatizado e possibilidade de implementação de outras formas de controle.
Posteriormente realizou-se, em campo, uma validação teórico-experimental
do controle Proporcional-Integral (PI) do controlador lógico programável
(CLP), além de comparar com o controle centrífugo existente no conjunto
motor/gerador, sendo colocadas duas cargas diferentes no gerador de eletricidade movido a biogás para vericar a resposta do sistema. Por m, foram
efetuadas coletas de dados através de sensores e sistemas de aquisição, para
realizar análises em diversos âmbitos a m de validar as simulações realizadas.
1.4 Objetivos
O custo de implantação de um sistema de controle de vazão, que segundo
(40), é a terceira grandeza mais medida nos processos industriais, está relacionado com o tamanho dos componentes. A robustez dos equipamentos
depende das variáveis do processo, ou seja, pressões e vazões elevadas interferem diretamente nos custos de implantação de uma unidade geradora de
eletricidade que utiliza biogás.
A presente dissertação tem como objetivo realizar o controle de vazão de
biogás e monitoramento do processo, assim como estabelecer a melhor estratégia de controle PI aplicadas ao controle de vazão de uma planta de biogás
20
com baixa pressão do Laboratório de Energias Alternativas da Universidade
Federal do Ceará. Os objetivos especícos são:
• Desenvolver o controle e sistema de supervisão da planta de biogás do
Laboratório de Energias Alternativas da UFC.
• Avaliar o comportamento do controlador PI Paralelo comparado ao
controle existente no conjunto motor/gerador em relação a variação de
carga;
• Possibilitar futuras estratégias de identicação e controle em estudo,
permitindo a validação dos resultados obtidos em ambiente de simulação, avaliando seu desempenho na presença de diculdades encontradas
na prática (ruídos, incertezas de modelagem, variações paramétricas);
1.5 Estrutura da Dissertação
A presente dissertação apresenta a implementação do sistema de aquisição
de dados, controle e monitoramento, assim como o estudo experimental das
estratégias de modelagem, identicação e controle PID aplicadas ao controle
de vazão da planta de biogás do Laboratório de Energias Alternativas da
Universidade Federal do Ceará.
A Dissertação está organizado de acordo com os seguintes capítulos: além
desta introdução, que aborda os aspectos gerais sobre os sistemas centralizados e descentralizados de energia, biomassa, motivação, os objetivos e a
metodologia aplicada no desenvolvimento deste trabalho, no capítulo 2 é
feito um panorama sobre os tipos e as aplicações dos biodigestores, no capítulo 3 é abordada a teoria de controle, técnicas utilizadas na identicação
de sistemas, as congurações de algoritmos de controle PID e os principais
sistemas de supervisão. No capítulo 4 são descritas as etapas de instalação
do biodigestor, o desenvolvimento das telas do sistema de supervisão, simulações, ensaios de controle e automação realizados na planta de produção
de biogás do Laboratório de Energias Alternativas - LEA com a análise do
comportamento dos controladores e o melhor ajuste de controle da vazão de
21
biogás com baixa pressão para o funcionamento do gerador. No capítulo 5 são
descritos os resultados de simulações e experimentos realizados. Finalmente
no capítulo 6 são apresentados as conclusões, contribuições e propostas para
trabalhos futuros.
Capítulo 2
Biodigestores
Neste capítulo são apresentados aspectos e conceitos básicos sobre biomassa, biogás e os tipos de biodigestores. Serão apresentados também as
principais aplicações, vantagens e desvantagens dos modelos mais utilizados
na produção de biogás.
2.1 Contextualização
O meio ambiente e seus recursos naturais limitados são uma preocupação
crescente, não apenas no Brasil mas em todo o Mundo. Hoje ouve-se falar
quase que diariamente sobre o aquecimento global, a importância da redução
de emissões CO2 associados com as alterações climáticas, chuva ácida e suas
consequencias. O problema de maior importância causado pelo uso da energia
é o efeito estufa, que pode ser denido como o aumento da temperatura média
da Terra em consequência do aumento da concentração atmosférica de alguns
gases tais como o gás carbônico (CO2 ), os clorouorcarbonos (CF Cs ), o
metano (CH4 ), o óxido nitroso (N2 O) e outros. Estes gases são conhecidos
como gases do efeito estufa. São gases que capturam parte da radiação
infravermelha que a Terra devolve para o espaço provocando o aumento da
temperatura atmosférica com decorrentes mudanças climáticas.
O consumo de combustíveis fósseis responde pela maior parte da poluição
ambiental. Para (27), 95% de todos os óxidos de enxofre e de nitrogênio,
23
assim como o dióxido de carbono (CO2 )(maior causador do efeito estufa),
de origem antropogênica são produtos da combustão de combustíveis fósseis.
No caso do monóxido de carbono (CO) e dos compostos orgânicos voláteis,
a porcentagem é aproximadamente 70%. Por estas razões o acréscimo no
consumo de energia tem um impacto ambiental tão grande.
As fontes alternativas de energia despertam interesse no mundo todo,
devido ao fato de seu uso ser ambientalmente correto, e no Brasil isso não
poderia ser diferente, pois sua matriz energética é composta de 43,9% com
energia renovável, segundo dados do Ministério de Minas e Energia de 2010.
Grande parte dessa energia vem de hidroelétricas que precisam de rios perenes para viabilizar sua construção. A região semi-árida brasileira, no entanto, conta apenas com o rio São Francisco com essa característica. Nesse
caso, a energia utilizada no abastecimento dessa região brasileira precisa ser
transportada a grandes distâncias através de linhas de transmissão, gerando
custos de implantação e manutenção dessas redes. Por outro lado, outras
fontes renováveis de energia como a solar, eólica e biomassa estão presentes
no semi-árido, logo um caminho a ser seguido para um desenvolvimento sustentável dessa região é promover a pesquisa e a disseminação destes meios
alternativos e descentralizados de energia. Pensando assim, avaliar o potencial energético de biomassa exclusiva do semi-árido pode trazer benefícios
econômicos, ambientais e energéticos à região.
Segundo (41), os problemas epidemiológicos constatados no meio rural
estão relacionados com os agentes causadores de infecções dentro das propriedades. A prevenção dos fatores que contribuem para sua ocorrência, protegem os animais contra o risco de infecções e o público contra zoonoses, ou
outros riscos sanitários provocados pelo lançamento de resíduos no ambiente.
O acúmulo de dejetos pode criar um ambiente propício para ploriferação
de vetores transmissores de doenças. Do ponto de vista sanitário, os dípteros
são considerados os insetos mais importantes. Contudo, os pernilongos e
borrachudos são hematófagos, podendo veicular doenças como a malária, a
febre amarela ou a lariose.
As moscas domésticas (Musca
domestica ) e varejeiras (Chrysomya spp )
são vetores de febre tifóide, disenteria, poliomielite, entre outras doenças.
24
Criadas em ambiente úmido contendo esterco e palhas ou resíduos de
rações, a mosca de estábulos ou mutuca (Stomoxys
Calcitrans ), machos e
fêmeas, sugam sangue dos animais. A ocorrência desses dípteros pode determinar a perda de sangue e a redução no ganho de peso dos animais, além da
transmissão de doenças aos animais e às pessoas, como a anemia infecciosa
dos equinos, carbúnculo hemático, e várias formas de tripassonomoses.
2.1.1 Biomassa
A Biomassa é um material constituído por substâncias de origem orgânica. Tais como: resíduos orestais e agrícolas, resíduos animais e a matéria
orgânica contida nos resíduos industriais, domésticos, municipais, etc. Estes
materiais contêm energia química provinda da transformação energética da
radiação solar. Essa energia química pode ser liberada diretamente por combustão, ou convertida através de algum processo em outras fontes energéticas
mais adequadas, para um m qualquer desejado, tal como biogás, álcool e
o carvão vegetal. Aproveitando aproximadamente 1% do total da radiação
solar incidente sobre a terra. Em uma pesquisa (42) estimou, em 1985, que
anualmente sejam produzidas, pelo processo de fotossíntese, cerca de 61 mil
GWh, ou seja, mais que 10 vezes a energia global consumida por ano no planeta. O total de energia existente na cobertura vegetal da Terra, incluindo-se
as orestas tropicais e temperadas, as savanas e campos, é estimado como
sendo cerca de 100 vezes o consumo mundial de energia ao longo de um ano.
Naturalmente só uma parte desta quantidade pode ser utilizada para atender
às necessidades humanas, porém estes números servem para dar uma idéia
da importância que tem o potencial energético da biomassa (43).
A energia oriunda da biomassa pode ser classicada de diversas maneiras, entretanto deve-se reconhecer que aos uxos de energia de biomassa são
associados os biocombustíveis os quais, por sua vez, podem ser apresentados em três grupos principais, de acordo com a origem da matéria que os
constitui. Dessa forma, existem os combustíveis de plantação não orestal
(agrocombustíveis), biocombustíveis da madeira (dendrocombustíveis), e os
resíduos urbanos (43).
25
Segundo (43) a energia acumulada na biomassa está na forma de energia
química, sendo necessárias reações químicas para a sua liberação, podendo
então ser usada para realização de trabalho útil, que pode ser a produção
de calor. Em muitas situações especícas, o emprego da biomassa requer
uma conversão para uma melhor adequação do seu uso ou transporte, devido
principalmente a natureza sólida da biomassa.
Pode-se citar como exemplo a utilização da energia da biomassa em motores de combustão interna, pois a matéria-prima deve sofrer processos de
conversão que a transformam em combustível gasoso ou líquido para serem
usados nos motores.
2.1.2 Biodigestor
Segundo (44), a origem do biodigestor é bastante antiga, os povos essencialmente agrícolas como no caso os hindus, já utilizavam esse método de
decomposição, mas foram os chineses que trouxeram esta tecnologia rudimentar até os dias de hoje.
Em 1806, na Inglaterra, Humphry Davy identicou um gás rico em carbono e dióxido de carbono, resultante da decomposição de dejetos animais
em lugares úmidos. Ao que parece, apenas em 1857, em Bombaim, Índia,
foi construída a primeira instalação operacional destinada a produzir gás
combustível, para um hospital de hansenianos. Nessa mesma época, pesquisadores como Fisher e Schrader, na Alemanha e Grayon, na França, entre outros, estabeleceram as bases teóricas e experimentais da biodigestão anaeróbia. Posteriormente, em 1890, Donald Cameron projetou uma fossa séptica
para a cidade de Exeter, Inglaterra, sendo o gás produzido utilizado para
iluminação pública.
Inegavelmente, a pesquisa e desenvolvimento de biodigestores se desenvolveram muito na Índia, onde, em 1939, o Instituto Indiano de Pesquisa
Agrícola, em Kanpur, desenvolveu a primeira usina de gás de esterco. O
sucesso obtido animou os indianos a continuarem as pesquisas, formando o
Gobar Gás Institute (1950). Tais pesquisas resultaram em grande difusão da
metodologia de biodigestores como forma de tratar os dejetos animais, obter
26
biogás e ainda conservar o efeito fertilizante do produto nal. Foi esse trabalho pioneiro, realizado na região de Ajitmal (norte da Índia), que permitiu
a construção de quase meio milhão de unidades de biodigestão no interior
daquele país.
No Brasil os biodigestores rurais tiveram maior desenvolvimento na década de 80 quando contaram com grande apoio dos Ministérios da Agricultura
e de Minas e Energia. Cerca de 8.000 unidades, principalmente os modelos
chinês e indiano, além de alguns de plástico tinham sido construídos até 1988,
dos quais 75% estavam funcionando adequadamente (45).
Ainda que inexistissem dados precisos quanto ao número de biodigestores
no país, a Emater calculou que em 1984 este número era de 3.000 biodigestores, principalmente do modelo Indiano utilizado para biodigestão de dejetos
de bovinos. De acordo com (46), utilizando os dados do Levantamento Agropecuário Catarinense (2002-2003) e considerando somente produtores com
mais de 50 cabeças de suínos (7.158 suinocultores), vericou-se que 0,08%
deles possuíam biodigestores e 99,2% esterqueiras.
Um projeto experimental na Bahia usou o esterco de 100 caprinos, 50 kg
por dia, em um biodigestor de lona de PVC. A produção de biogás foi de
3 m3 /dia. O Nordeste brasileiro tem um efetivo aproximado de 17.140.000
caprinos e ovinos, a produção de dejetos desse rebanho é de aproximadamente
3.120.000 ton/ano que pode produzir anualmente através do biogás 1.032
GWh (47).
Em um estudo realizado pela Universidade Federal do Ceará no município de Pentecoste no estado do Ceará, constatou que o investimento para a
construção do biodigestor foi de R$ 3.277,00. Os resultados demonstraram
que 1 m3 de biogás produzido à partir de esterco de caprino equivale a 0,75
L de gasolina o suciente para substituir cerca de 30% do volume de gasolina
consumido para a irrigação de 1 (um) hectare (47).
Segundo (48), os biodigestores rurais são importantes para o saneamento
rural, pois o processo de digestão anaeróbia promove a redução da carga
orgânica convertendo o carbono presente na matéria orgânica em CH4 que
é utilizado como combustível, redução dos sólidos e também a redução de
27
microrganismos patogênicos presentes nos euentes. Além de estimularem a
reciclagem da matéria orgânica e de nutrientes, possibilitam a higienização
das instalações para criação de animais, promovendo o tratamento de seus
dejetos, proporcionando diminuição de moscas e odores.
Conforme (49), é mostrado na Figura 2.1 o ciclo do processo de obtenção
do biogás e biofertilizante com a utilização dos biodigestores. O processo
é iniciado com a seleção da biomassa e adicionado com água. Após ser
misturado é colocada no biodigestor para iniciar o processo de fermentação.
Através da utilização dessas fontes, obtem-se os alimentos, que são transformados, após o beneciamento, em resíduos e reutilizados como biomassa.
Figura 2.1: Ciclo da biomassa e biodigestor (49).
28
2.1.3 Modelos de Biodigestores
Os biodigestores podem ser encontrados em diversos modelos (indiano, chinês, tubular) cada qual com suas vantagens e desvantagens e características
próprias de operação. Entretanto, existem dois tipos básicos de biodigestores classicados de acordo com a freqüência de operação: os biodigestores em
"batelada"e os biodigestores "contínuos".
Chama-se de biodigestores em batelada aqueles que operam de forma
descontínua: o processo de biodigestão se dá por cargas que são inseridas no
compartimento de fermentação. Este processo é utilizado quando, por algum
motivo, não é possível a alimentação do biodigestor com matéria orgânica
diariamente, ou, quando o consumo de biogás é baixo, não exigindo uma
produção diária do biogás.
Nos biodigestores em batelada a matéria orgânica é inserida toda de uma
só vez e então ele é fechado hermeticamente (de forma a não permitir a
entrada de oxigênio) até que ocorra o processo de digestão anaeróbia. O
biodigestor será aberto novamente só quando a produção de biogás cair,
indicando que a matéria orgânica já foi decomposta e que pode ser feita a
retirada da matéria restante, o biofertilizante, para, caso seja necessário, ser
inserida nova carga de matéria orgânica.
Já os biodigestores de operação contínua operam com cargas diárias de
matéria orgânica que se movimenta por meio de carga hidráulica dentro do
biodigestor devendo a matéria orgânica, portanto, ser diluída e até mesmo
triturada para evitar entupimentos e formação de crostas no interior do biodigestor.
Entre os modelos de biodigestores rurais simplicados mais utilizados
distinguem-se os seguintes tipos principais: biodigestor com campânula utuante (modelo indiano), biodigestor com cúpula xa (modelo chinês) e biodigestor tubular solar.
29
2.1.3.1 Modelo Indiano
Este modelo de biodigestor caracteriza-se por possuir uma campânula
como gasômetro, a qual pode estar mergulhada sobre a biomassa em fermentação, ou em um selo d'água externo, e uma parede central que divide o
tanque de fermentação em duas câmaras. A função da parede divisória faz
com que o material circule por todo o interior da câmara de fermentação. O
modelo indiano possui pressão de operação constante, ou seja, à medida que
o volume de gás produzido não é consumido de imediato, o gasômetro tende a
deslocar-se verticalmente, aumentando o volume deste, portanto, mantendo
a pressão no interior deste constante. O fato de o gasômetro estar disposto ou
sobre o substrato ou sobre o selo d'água, reduz as perdas durante o processo
de produção do gás. O resíduo a ser utilizado para alimentar o biodigestor
indiano, deverá apresentar uma concentração de sólidos totais (ST) não superior a 8%, para facilitar a circulação do resíduo pelo interior da câmara de
fermentação e evitar entupimentos dos canos de entrada e saída do material.
O abastecimento também deverá ser contínuo, ou seja, geralmente é alimentado por dejetos bovinos e/ou suínos, que apresentam uma certa regularidade
no fornecimento de dejetos. Do ponto de vista construtivo, apresenta-se de
fácil construção, contudo o gasômetro de metal pode encarecer o custo nal,
e também à distância da propriedade pode dicultar e encarecer o transporte
inviabilizando a implantação deste modelo de biodigestor. Na Figura 2.2 é
mostrado o biodigestor modelo indiano (48).
O biodigestor do tipo indiano apresenta as seguintes vantagens e desvantagens:
Vantagens
• O digestor do modelo indiano é construído enterrado no solo e, como
a temperatura do solo é pouco variável, o processo de fermentação
que ocorre em seu interior tem a vantagem de sofrer pouca variação
de temperatura. A temperatura elevada favorece a ação das bactérias
(responsáveis pelo processo de fermentação anaeróbica) e a sua queda
provoca uma menor produção de biogás;
30
Figura 2.2: Biodigestor modelo indiano (48).
• Ocupa pouco espaço do terreno porque sua maior extensão é vertical;
• Em termos de custos, sendo as paredes de seu digestor construídas
dentro do solo, o modelo dispensa o uso de reforços, tais com cintas de
concreto, o que reduz custos.
Desvantagens
• Quando a campânula for de metal, ela está sujeita ao problema de
corrosão. Para evitá-lo, recomenda-se fazer uma boa pintura com um
antioxidante, com por exemplo, o zarcão;
• O custo da campânula, que o modelo chinês não tem;
• O sistema de comunicação entre a caixa de carga e o digestor, sendo
feito através de tubos, pode ocorrer entupimentos;
• Escavação em regiões semi-áridas devido ao solo pedregoso.
2.1.3.2 Modelo Chinês
O modelo chinês apresenta baixo custo de construção, não possui partes
31
móveis, não possui partes metálicas que podem ser oxidadas e portanto
são mais duráveis. Estes biodigestores são construídos enterrados e ocupam pouco espaço fora do solo, portanto mais protegidos contra as variações
climáticas da superfície, principalmente em regiões que apresentam baixas
temperaturas no inverno. Em sua construção, geralmente ocupam mão-deobra e materiais locais. A cúpula de armazenamento do gás do modelo chinês muitas vezes apresenta vazamento, devido à porosidade dos materiais de
construção geralmente utilizados e ao aparecimento de ssuras.
Quando estes vazamentos ocorrem, são muito difíceis de serem detectados
e consertados, pois estes vazamentos as vezes não aparecem em testes de
carga simples mas só quando o biodigestor está em funcionamento. Muitas
vezes são sob condições de variação de pressão que as ssuras se propagam e
ocorrem os vazamentos.
Estes biodigestores não apresentam descarga automática, possuem portanto um manejo complicado. O biodigestor de cúpula xa somente deve ser
recomendado para locais onde a mão-de-obra de construção seja supervisada
por técnicos com muita experiência em matéria de biodigestores e algum
conhecimento de hidrostática. Seus usuários devem ser assessorados com regularidade durante um longo período, até que saibam realmente operá-los.
Na Figura 2.3, pode ser visto um biodigestor modelo chinês (48).
O interior desse biodigestor compreende a câmara de digestão (cerca de
2/3 da altura) e o depósito de gás ou gasômetro (terço superior). Originalmente esse modelo recebia uma única carga para digestão, que só era retirada
com a exaustão da produção de biogás. para evitar esse inconveniente, ao
modelo foi adaptado um alimentador diário de massa orgânica e uma saída
para biofertilizante, passando a produzir biogás continuamente.
O biodigestor do tipo chinês apresenta as seguintes vantagens e desvantagens:
Vantagens
• Este modelo tem um custo mais barato em relação aos outros, pois a
cúpula é feita de alvenaria;
32
Figura 2.3: Biodigestor modelo chinês (48).
• O biodigestor chinês é o que ocupa menos espaço na superfície do solo,
pois é completamente enterrado no solo (tanto o digestor, como o gasômetro);
• Sofre pouca variação de temperatura.
Desvantagens
• O sistema de comunicação entre a caixa de carga e o digestor sendo
feito através de tubos, está sujeito a entupimentos;
• Tem limitação ao tipo de solo. Sua construção em solos superciais
não é indicada;
• Não é um biodigestor próprio para acúmulo de gás, devido a sua construção de cúpula xa (a área de reserva de gás é menor). É um modelo
mais indicado na produção de biofertilizante;
• Suscetível a problemas de estanquidade;
• Ocorrência de oscilações de pressão de gás que às vezes são muito altas
para ser suportadas pela estrutura ou pelos equipamentos a gás
• Não pode ser deslocado para outro lugar.
33
2.1.3.3 Modelo Tubular Solar
Os biodigestores tubulares, conhecidos também como digestores plug-ow
(seu nome em inglês) ou de uxo em pistão, geralmente possuem uma relação largura e comprimento igual ou superior a 1:5. A biomassa tem entrada
contínua em uma das extremidades do biodigestor, passa através do mesmo
e é descarregada na outra extremidade, na mesma sequência em que entrou.
O uxo se processa como um êmbolo, sem misturas longitudinais. As partículas mantém sua identidade e permanecem no tanque por um período igual
ao tempo de retenção hidráulica. Para garantir isso, os biodigestores são
longos, com uma elevada relação comprimento-largura, na qual a dispersão
longitudinal é mínima (50).
O primeiro registro do uso de biodigestores tubulares foi na República da
África do Sul, em 1957, operando a 35o C, com tempo de retenção hidraú-
lica de 40 dias e cargas orgâncias de 3,4 kg de sólidos totais por m3 . Nos
Estados Unidos, o sistema foi intensamente estudado por pesquisadores da
Universidade de Cornell, liderados por William Jewell (51).
Segundo (52), os biodigestores tubulares são cilíndricos, construídos abaixo
do nível do solo e operam com tempos de retenção de mais de 15 dias. Nos
Estados Unidos, admite-se o uso deste tipo de digestores apenas para dejetos
de bovinocultura-de-leite, operando com teores de sólidos entre 11% e 13%.
Segundo (53), no Brasil, na região oeste do Paraná, os biodigestores tubulares passaram a ser utilizados no início da década de 80, e foram adaptados
às condições locais por Johann Reichl. Após anos de experimentação prática
com este modelo, foram incorporadas uma série de inovações para aumentar
sua eciência. Ainda (53) cita como vantagens do biodigestor tubular tipo
Reichl, também conhecido como biodigestor solar de manta plástica, o baixo
custo de implantação, a utilização eciente da energia solar, captada pela
manta plástica negra e incorporada na biomassa pelo agitador cinético.
Atualmente, biodigestores que utilizam a lona de PVC como gasômetro
são os mais usados para o processamento de dejetos de suínos. Produtores
de suínos do Paraná se associaram para, em conjunto, aplicar a tecnologia
de produção de biogás e biofertilizante, buscando auto-suciência energética.
34
Quando manejado adequadamente, esse biodigestor pode produzir biogás
com uma eciência de produção variando entre 0,35 a 0,60 m3 de biogás por
m3 de biomassa. Para uma produção economicamente aceitável de biogás o
manejo dos dejetos na unidade produtora de suínos deve buscar obter a maior
concentração possível de Sólidos Voláteis e evitar o desperdício de água (54).
Na Figura 2.4 é mostrado um biodigestor do tipo tubular solar (55).
Figura 2.4: Biodigestor Modelo Tubular Solar (55).
O biodigestor do tipo tubular solar apresenta as seguintes vantagens e
desvantagens:
Vantagens
• Produção contínua de biofertilizante e biogás;
• Redução de odores e insetos;
• Fácil instalação e manutenção;
• Permite a transferência do local de instalação.
Desvantagens
• Investimento inicial em mão-de-obra operacional;
35
• Produção de biogás altamente dependente das condições climáticas;
• Escavação em solos pedregosos;
• Possibilidade de perfuração da lona plástica.
2.1.3.4 Matéria-Prima do Biodigestor
A quantidade de gás produzida por dia, varia de acordo com a matériaprima utilizada, temperatura interna, proporção de substrato/água e pH e
principalmente, com a capacidade do biodigestor.
A mistura de água é variável de acordo com o material (fresco ou seco)
e o seu tipo. De um modo geral, para os resíduos agrícolas verdes a relação
é de 1:1. Já para os estercos animais, varia de acordo com a espécie e o
estado (fresco ou seco). Uma maior concentração de massa prejudica a ação
bacteriana e a liberação do biogás, uma pequena concentração (massa muito
diluida em água) apresenta problemas de temperaturas baixas e diminui a
ação bacteriana. Conforme (56), a Tabela 2.1 é mostrado os valores das
proporções de água na matéria seca de alguns dejetos.
Tabela 2.1: Proporção de água na matéria seca para biodigestores (56).
Dejetos
Bovinos
Suinos
Equínos
Ovínos
Caprinos
Aves
Humanos
Aguapé
Mat.Seca/Peso
16,50%
19,00%
24,29%
34,5%
34,80%
19%
18%
10,00%
Água
100%
130%
193%
317%
321%
130%
118%
21%
Biogás por m3 /Mat.seco
270 m3
560 m3
260 m3
250 m3
285 m3
280 m3
270 m3
100/600 m3
O cálculo do volume do biodigestor pode ser determinado através da
quantidade de material orgânico diário disponível e do seu potencial gerador
de biogás ou a partir da previsão do consumo diário de biogás. Cada material
tem um potencial gerador no estado verde ou seco, tendo-se o conhecimento
dos sólidos totais (ST)ou dos sólidos voláteis (SV) do material disponível,
36
também é possível fazer uma previsão do gás gerado e do volume necessário do
biodigestor. Alguns autores usam a taxa de Demanda Química de Oxigênio
(DQO)apresentada pelo material a ser utilizado.
Segundo (41), o volume do biodigestor é calculado através do produto
da carga diária pelo período, em dias, de retenção da materia orgânica para
fermentação, conforme a Equação 2.1.
V B = (V C)X(T RH)
(2.1)
Sendo:
• VB - Volume do Biodigestor (litros);
• VC - Carga/dia (dejetos + água) (litros/dia);
• TRH - tempo de retenção hidráulica (dias).
O tempo de retenção necessário para a degradação da matéria orgânica
(varia de 20 a 50 dias). O volume em m3 pode ser encontrado dividindo o
volume do biodigestor por 1000.
De acordo com as estimativas da Recolast Ambiental, fabricante do biodigestor, a quantidade de fontes para realizar a carga da unidade de biodigestão
modelo 4500 é dada na Tabela 2.2.
Tabela 2.2: Estimativa de Quantidade x Fontes (55).
Modelo
Tubular 4500
Tubular 4500
Tubular 4500
Tubular 4500
Fonte
Bovinos
Suínos
Frangos
Humanos
Quantidade
7
15
750
15
O esgoto comunitário o vinhoto ou vinhaças das usinas e destilarias sucroalcooleiras, os aguapés dos grandes barramentos hídricos, aterros de grande
porte, são materiais altamente promissores, tendo em vista os respectivos
volumes disponíveis, o custo da matéria-prima praticamente zero e a alta
produtividade. De acordo com (55), somente o rebanho suíno brasileiro (38
milhões de cabeças) é capaz de produz, por mês, 7,2 bilhões de litros de
dejetos líquidos. Considerando os valores considerados na Tabela 2.1 e um
37
tempo de retenção de 20 dias, seria possível produzir 6,24 milhões de m3 de
biogás e aproximadamente 8,9 milhões de KWh.
2.1.4 Biogás
O biogás é uma mistura de gases resultante da decomposição de matéria
orgânica, pela ação de bactérias anaeróbias (na ausência de oxigênio). O
biogás é composto principalmente por metano (CH4 ), que é o principal elemento representando cerca de 60 a 80 % na composição do total de mistura e
dióxido de carbono (CO2 ), encontrando-se ainda em menores proporções gás
sulfídrico e nitrogênio. Inicialmente, o termo biogás estava associado aos diversos nomes atribuídos a ele, como: gás dos pântanos, gás de aterro, gás de
digestor e gás da fermentação. Atualmente, o termo refere-se, de forma geral,
àquele gás formado a partir da degradação anaeróbia da matéria orgânica.
O metano é um gás incolor, altamente combustível, queimado com chama
azul lilás, sem deixar fuligem e com um mínimo de poluição, que é o ideal
para redução do efeito estufa. Em função da porcentagem com que o metano
participa na composição do biogás, o poder caloríco deste pode variar de
5.000 a 7.000 kcal por metro cúbico. Esse poder caloríco pode chegar a
12.000 kcal por metro cúbico uma vez eliminado todo o gás carbônico da
mistura. A matéria-prima usada na produção do biogás é de origem orgânica, são aproveitados materiais como esterco (humano e de animais), palhas,
bagaço de vegetais e lixo. Essa fonte energética pode ser utilizada como combustível para fogões, motores e na geração de energia elétrica. Na Tabela 2.3
é mostrado os valores de equivalência do biogás com outros combustíveis.
Diversos países têm pesquisas com digestão anaeróbica e muitos deles já
produzem comercialmente o biogás. Na Europa essa produção é difundida
por várias razões. A produção de biogás é economicamente viável, as instalações têm operação simples e são facilmente montadas, eletricidade e calor
podem ser gerados sem emissão de dióxido de carbono, a emissão de metano
é reduzida, pois evita o armazenamento de dejetos dos animais e melhora a
qualidade do biofertilizante. Essas são algumas vantagens que têm levado os
europeus para a produção do biogás (57).
38
Tabela 2.3: Equivalência do biogás (0-60% de CH4 ) (48).
Biogás m3
1,0
1,0
1,0
1,0
1,0
1,0
1,0
Equivalência/Combustível
0,61 litros de gasolina
0,55 litros de diesel
0,57 litros de querosene
0,45 kg de gás liquefeito
0,79 litros de álcool combustível
1,538 kg de lenha (10% de umidade)
1,428 kwh
A Inglaterra e a Alemanha são os países de maior representatividade,
onde 39% e 35%, respectivamente, suas participações na produção total de
biogás. Baseado na produção total de resíduos possíveis de serem processados
para produção de biogás desses países, teoricamente a produção de biogás
em 2020 deve ser aproximadamente de 756 x 109 MJ. A França seguida da
Alemanha e Inglaterra, são os países que terão a maior produção de biogás
da União Européia (58).
Nos países da América Latina, Argentina, Peru, Brasil, Chile e México, a
implementação de unidades de biogás está apenas começando. As construções são simples semelhantes às unidades produtoras da Ásia, com um volume
de 2-10 m3 (59).
Articialmente a produção de biogás ocorre através de um equipamento,
o biodigestor anaeróbico. O próprio metano não possui cheiro, cor ou sabor, mas os outros gases apresentam odor desagradável. O biogás é uma
fonte energética renovável, por essa razão é considerado um bicombustível.
De acordo com (60), na Figura 2.5 é apresentado o modelo simplicado do
processo de obtenção do biogás e adubo fertilizante com o esterco de animais.
Embora a digestão dos compostos orgânicos possa ocorrer num ambiente
aeróbico, com a presença de oxigênio, a digestão anaeróbica, sem oxigênio
livre é a que faculta uma boa produção de biogás. Nesses dois processos
as bactérias atuantes necessitam para se desenvolver e exercer a importante
ação metabólica. As do meio aeróbio retiram o oxigênio diretamento do ar,
enquanto as do meio anaeróbio retiram da própria matéria orgânica. Esta
atuação bacteriana é de grande importância para eciência da conversão
39
Figura 2.5: Modelo simplicado de obtenção de biogás (56).
como também para maior pureza do gás (teor de metano).
A digestão aneróbica (DA) é o meio mais eciente de gerar energia a
partir de resíduos, com teores de matéria seca inferior a 30% (de preferência
no intervalo 5-12,5%), tais como estrumes, lodo de esgoto, comida e outros
resíduos orgânicos molhados. A tecnologia básica de DA envolve fermentação
anaeróbica da matéria-prima resíduos orgânicos húmidos para produzir o
metano e o dióxido de carbono, com o metano que está sendo utilizado para
aquecimento, geração de eletricidade ou como combustível nos transportes.
A biodigestão anaeróbica se processa sequencialmente em três fases. O
primeiro estágio acontece a desestruturação do material orgânico ainda cru,
pela ação de bactérias denominadas psidofílicas, que agem preferencialmente
à temperatura de 16◦ C. Há uma despolimerização de gorduras, carboidratos,
celulose e proteinas, com a transformaçào do material orgânico insolúvel e
complexo em material solúvel e produtos simples (monômeros). Na segunda
fase denominada acidofílica ou simplesmente acidóla, agem bactérias saprofíticas que, ao metabolizarem os monômeros da fase anterior produzem
40
acídos orgânicos como o propiônico, acético, láctico, fórmico, alguns acetatos
e a liberação de CO2 e água. Na fase seguinte, gaseicante ou metanogênica, os acídos formados são metabolizados por bactérias metanogênicas
sarcina methanica, methanocus mazei, methanobacteriuns sochnenni e
methanobacter omilianskii.
como
A digestão ocorre em um recipiente fechado (digestor) aquecido, onde
bactérias fermentam a matéria orgânica. Temperaturas baixas (menos de
15◦ C), bem como sua oscilação são desfavoráveis para o processo de digestivo,
chegando paralisá-lo. O metanogênico pode se desenvolver satisfatóriamente
em duas faixas de temperatura: a mesóla, entre 25◦ C a 45◦ C e a termóla,
entre 55◦ C a 65◦ C. No Norte e Nordeste do país, a faixa termóla ocorre
naturalmente, que é um fator favorável para produção de biogás e geração
de eletricidade através da sua utilização.
Em paises com temperaturas baixas o aquecimento do digestor é derivado
de uma caldeira a metano ou de calor recuperado de um sistema de motor a
gás. A temperatura do tanque de digestão, pode ser aumentada para o intervalo de mesólos (30-35◦ C), onde a matéria-prima permanece em do digestor
tipicamente por 15 a 30 dias, ou dentro da faixa termofílica (55-65◦ C), onde
o tempo de residência é normalmente 12 a 15 dias. Os sistemas termofílicos de digestão oferecem maior produção de metano, mas exigem tecnologia
mais cara, maior entrada de energia e um maior grau de monitoramento.
Normalmente, cerca de 30 a 60% da massa da matéria-prima de biomassa
são convertidos em biogás (metano e dióxido de carbono).
2.1.4.1 Panorama do Consumo da Biomassa/Biogás
A biomassa é uma das fontes para produção de energia com maior potencial de crescimento nos próximos anos. Tanto no mercado internacional
quanto no interno, ela é considerada uma das principais alternativas para a
diversicação da matriz energética e a conseqüente redução da dependência
dos combustíveis fósseis. Dela é possível obter energia elétrica e biocombustíveis, como o biodiesel e o etanol, cujo consumo é crescente em substituição
a derivados de petróleo (15).
41
De acordo com os dados preliminares do Balanço Energético Nacional BEN, documento produzido pela Empresa de Pesquisa Energética - EPE, a
oferta de energia não renovável no país sofreu redução de quase 6% entre 2008
e 2009. As fontes renováveis apresentaram queda dez vezes menor (0,6%), o
que contribuiu para um perl ainda mais renovável da matriz nacional. As
fontes renováveis (produtos da cana-de-açúcar, hidreletricidade, biomassa)
responderam por 47,3% de toda a energia da matriz energética brasileira
em 2009 (61). Em 2009, a participação da biomassa na matriz energética
brasileira foi de 13,9% (Figura 2.6).
Figura 2.6: Perl da matriz energética brasileira em 2009 (61).
A quantidade estimada de biomassa existente na Terra é da ordem de
1,8 trilhão de toneladas. Este volume, quando confrontado com o grau de
eciência das usinas em operação no mundo no ano de 2005, aponta para uma
capacidade de geração de 11 mil TWh por ano no longo prazo ou mais da
metade do total de energia elétrica produzida em 2007, que foi de 19,89 mil
TWh, segundo o estudo da Estatistical Review of World Energy, publicado
em junho de 2008 pela BP Global (Beyhond
da
British Petroleum ).
Petroleum, nova denominação
42
2.1.4.2 Perspectivas para o Uso de Biodigestores
Com a divulgação do Plano Nacional de Energia 2030, pode se ter um
referencial da produção e consumo para os próximos anos. O Plano conclui
que: em 2005 as energias denominadas como outras (que incluem os resíduos
agrícolas, industriais e urbanos) representaram 2% do consumo energético do
país, sendo que em 2030 representarão 3%; o consumo energético do setor
agropecuário que em 2005 representou 5% do total do país, irá ter a mesma
representatividade em 2030; as fontes primárias (excetuando-se a cana-deaçúcar) terão um crescimento de 4% na matriz energética entre 2005-2030;
o Brasil conseguirá manter um grau relativamente baixo de dependência externa de energia, custos competitivos de produção de energia e níveis de
emissões de gases (um dos mais baixos do mundo) praticamente inalterados
(62).
As crises dos derivados de petróleo (fornecimento e preço) e da energia
hidroelétrica (construção e preço do kW) vem ensejando estudos para o aproveitamento de resíduos, até há pouco tempo considerados inaproveitáveis ou
mesmos poluentes para geração de energia através de biodigestores. O uso de
biodigestores no meio rural nordestino pode contribuir para combater o processo de deserticação, assegurando um desenvolvimento sustentável para o
semi-árido. O biogás produzido pode ser usado em substituição à lenha para
cocção de alimentos em fornos ecientes. Adicionalmente, o biogás pode ser
usado como combustível na geração de energia elétrica, elevando os índices
de eletricação da região.
Em 2008, uma parceria entre a Itaipu Binacional, Companhia Paranaense
de Energia (Copel) e produtores rurais de São Miguel do Iguaçu, no Paraná,
permitiu a produção de energia elétrica a partir de dejetos suínos. A eletricidade gerada é usada pelas propriedades e o excedente é vendido à Copel.
Cada suíno produz 10 litros de dejetos por dia e cada mil litros rende 1.360 litros de biogás, que geram 0,4 kWh de energia. Só na região, são 3 mil suínos.
Chamado Programa de Geração Distribuída com Saneamento Ambiental, ele
permite a utilização do material orgânico resultante da criação de suínos,
evitando o seu lançamento em rios e em reservatórios como o da usina hidre-
43
létrica de Itaipu. Os resíduos são transformados, por meio de biodigestores,
em biogás, combustível usado na produção de energia elétrica. Por decisão
da Aneel, a potência instalada máxima dos empreendimentos incluídos no
programa têm 300 kVA (quilovolt-ampere), que equivale a 270 quilowatts
(kW). Esta potência é suciente para abastecer 60 unidades consumidoras
residenciais com consumo mensal médio de 150 kW.
Segundo Airton Kunz, a novidade que pode ajudar neste avanço, é a regulamentação da geração distribuída a partir do biogás e sua comercialização
em todo o país, realizada pela Agência Nacional de Energia Elétrica (Aneel),
em dezembro passado. Pela Resolução Normativa 390 (63), qualquer distribuidora de energia elétrica pode fazer chamadas públicas para comprar
eletricidade produzida por biodigestores, que agora poderão fornecer para a
linha de distribuição, em vez de somente consumir. Isso permitirá que pequenos geradores de energia elétrica tenham ganhos a partir do biogás, abrindo
oportunidades econômicas para o produto no meio rural.
Ainda, tem se vericado que na atual conjuntura existe uma grande
margem para o desenvolvimento de melhorias no aproveitamento da biomassa através de biodigestores. Este incremento na eciência do processo de
conversão energética da biomassa pode ser encontrado principalmente com o
uso de tecnologias de automação e controle. Variáveis como vazão, pressão,
temperatura e umidade do biogás necessitam ser monitoradas, visando um
uso mais eciente tanto para geração de calor como para geração de eletricidade.
Capítulo 3
Identicação e Métodos de
Controle de Sistemas
No presente capítulo são abordadas a teoria de controle, técnicas utilizadas na identicação de sistemas, métodos de sintonia de algoritmos de
controle PID, controle de vazão e os principais sistemas de supervisão e controle.
3.1 Controle
O conceito de controle é originário do francês "contrerole", como também do latim medieval "contrarotulus", que signicava, contralista, isto é,
segundo exemplar do catálogo dos contribuintes, com base no qual se vericava a operação do cobrador de tributos, designando um segundo registro,
organizado para vericar o primeiro. O aparecimento do termo na língua portuguesa deu-se em 1922, signicando o ato ou efeito de controlar; monitorar,
scalizar.
Segundo (64), o primeiro trabalho signicativo de controle foi o de James
Watt, que construiu no século XVIII, um controlador centrífugo para controle de velocidade de uma máquina a vapor. Em 1922 Nicolas Minorsky,
trabalhou em controladores automáticos para pilotar navios e mostrou como
poderia determinar a sua estabilidade a partir da representação do sistema
45
através de equações diferenciais.
Hoje se percebe a aplicação de controle em todos os aparelhos e equipamentos que nos rodeia: máquinas de lavar, elevadores, automóveis, satélites,
aviões, aquecedor de ambiente e outros processos (40).
Ultimamente, o tema do controle tornou-se importante no cotidiano após
a incorporação da computação. O controle de processo industrial foi originalmente feito manualmente pelos operadores. Seus sensores foram o sentido
da visão, tato, e de som, tornando o processo totalmente dependente do
operador. Para manter um processo dentro dos limites estabelecidos para a
variável controlada, o operador poderia ajustar um dispositivo de controle
simples. A instrumentação e controle evoluíram lentamente ao longo dos
anos, a indústria encontrou uma necessidade para melhorar suas linhas de
produção, tornando-as mais precisas e mais consistentes para medidas mais
rigorosas alavancadas pela competitividade e abertura do livre comércio. O
primeiro impulso real para desenvolver novos instrumentos e sistemas de controle veio com a revolução industrial, e com a Primeira e Segunda Guerras
Mundiais.
Os sistemas de controle de processo, aplicados a grande parte da indústria
de transformação têm a inuência direta sobre a qualidade de um produto
acabado. Isso envolve a manipulação de muitas variáveis, a m de conseguir
o controle automático e ideal. O número de variáveis manipuladas depende
do produto que está sendo fabricado. Normalmente, mais de uma variável
é monitorada e controlada. As variáveis mais encontradas na indústria de
transformação são: pressão, temperatura, nível, vazão, condutividade, viscosidade e peso.
3.1.1 Formas de Controle
Os sistemas de controle podem ser divididos em malha aberta e malha
fechada. O sistema em malha aberta consiste em aplicar um sinal prédeterminado, esperando-se que ao nal de um determinado tempo a variável
controlada atinja um determinado valor. Ou seja, o sistema de controle em
malha aberta é aquele o qual a ação de controle é independente da saída.
46
Portanto a saída não tem efeito na ação de controle. Neste caso, a saída não
é medida e nem comparada com a entrada.
O sistema em malha fechada, ao contrário da malha aberta, a informação é assim "realimentada", através de transdutores, da variável controlada
para uma variável manipulada com o objetivo de atingir o valor desejado
na variável controlada. O sistema de controle em malha fechada é aquele
no qual a ação de controle depende, de algum modo, da saída. Portanto,
a saída possui um efeito direto na ação de controle. Neste caso, a saída é
sempre medida e comparada com a entrada a m de reduzir o erro e manter
a saída do sistema em um valor desejado. A realimentação é a característica do sistema de malha fechada que permite a saída ser comparada com
a entrada. Geralmente a realimentação é produzida num sistema, quando
existe uma sequência fechada de relações de causa e efeito entre variáveis do
sistema. Quando a realimentação se processa no sentido de eliminar a defasagem entre o valor desejado e o valor do processo, esta recebe o nome de
realimentação negativa. (65), classica os métodos de controle de processos
em malha fechada em dois tipos:
Feedback e Feedforward.
3.1.1.1 Malha de Controle Feedback
O controle
Feedback apareceu pela primeira vez em 1774 com o desenvol-
vimento do regulador centrífugo para o controle de velocidade das máquinas
à vapor.
A forma tradicional de controlar um processo é medir, através de sensores, a variável que está a ser controlada, comparar o seu valor com o valor
desejado, conhecido como
setpoint ou referência, realimentar o sistema com
essas informações gerando ou não uma diferença (erro) que irá alterar a variável manipulada para induzir a variável controlada a voltar para o valor
desejado. A informação é assim "realimentada"da variável controlada para
uma variável manipulada. Na Figura 3.1 é mostrado o diagrama de blocos
de um sistema controlado pelo método
Feedback.
A detecção de erros é a determinação da diferença entre a amplitude
da variável controlada (PV) e um valor desejado, denominado referência ou
47
Figura 3.1: Controle de
feedback em um processo (adaptado de (66)).
setpoint (SP). Qualquer diferença entre os dois é um sinal de erro, que é
amplicado e condicionado a alimentar um elemento de controle. O controlador, por vezes, realiza a detecção, enquanto que o ponto de referência é
normalmente armazenado na memória do controlador (66).
A perturbação, também conhecida como carga, atua no sistema de uma
forma imprevisível e o objetivo do controle é manter o valor da saída da
variável controlada (PV) igual a um valor desejado (SP). Essa comparação
entre a PV e o SP pode gerar um erro (e), que deve ser eliminado pelo
algoritmo de controle.
Feedback basicamente mede a variável controlada do
processo, compara com o valor desejado (setpoint ), encontra o erro, e calO controlador em
cula uma saída de controle para modicar a variável manipulada até que o
erro seja eliminado ou permaneça dentro de limites considerados como nulos.
Desta forma, sempre que surgir uma oscilação no sistema, o controlador será
capaz de atuar sobre o erro entre o
setpoint e o valor da variável controlada
e eliminá-lo. Infelizmente, na prática, não é bem assim que as coisas funcionam. As válvulas de controle possuem limites e saturam. É impossível abrir
uma válvula mais que 100%. Inclusive, há casos onde a própria dinâmica do
processo faz com que variações muito bruscas ocorram, seja por alteração de
carga, ou mesmo por modicação no valor do
setpoint. Em algumas vezes,
tal distúrbio acontece em tamanha magnitude, ou dura tanto, que um único
controlador convencional não é capaz de controlar o sistema.
Uma ação em
feedback possui as seguintes etapas:
48
• Medir o valor da saída (vazão, pressão, nível de líquido, temperatura,
composição) usando o instrumento de medida conveniente;
• Comparar o valor controlado PV com o valor desejado, SP (set-point )
da saída. Assim, denimos (e = SP - PV );
• O valor do desvio é fornecido ao controlador. O controlador, por sua
vez, muda o valor da variável manipulada (MV) de modo a reduzir a
magnitude do desvio (e).
3.1.1.2 Malha de Controle Feedforward
Para (67), o tempo morto pode ser denido como o tempo que transcorre
entre o instante que é introduzida uma mudança na variável de entrada e o
instante em que a saída do mesmo começa a mudar. Quando a razão entre o
tempo morto e a constante de tempo do processo for grande, o controle com
realimentação não é capaz de evitar grandes desvios do
set-point em função
das perturbações (40). Para evitar que prováveis distúrbios interram no
processo pode-se fazer medições de perturbação e usar essas informações e
nosso conhecimento do modelo de processo para fazer bons ajustes na variável manipulada antes que a perturbação interra na variável de controle.
No controle
feedforward observado na Figura 3.2, a perturbação ou distúr-
bio é detectado ao entrar no processo e uma mudança apropriada é feita
na variável manipulada de tal forma que a variável controlada é mantida
constante. Deste modo podem-se tomar as medidas corretivas. Devido essa
característica esse controle também é conhecido como controle antecipatório
ou regulação preditiva. A imprecisão do modelo é um aspecto de segurança
importante que dicilmente permite a implementação de estratégia
feedfor-
ward "puras". Em geral, o valor calculado pelo controlador feedforward é
enviado a um controlador feedback, aumentando a robustez do sistema.
3.1.1.3 Controladores Feedback ON-OFF
Conforme apresentado na Figura 3.3, o controlador
Feedback ON-OFF é
modelado por um relé . Neste tipo de controlador o elemento atuante pos-
49
Figura 3.2: Controle
feedforward em um processo (adaptado de (66)).
Figura 3.3: Controle de
feedback ON-OFF (66).
sui apenas duas posições xas: ligado (ON ) ou desligado (OFF ). Trata-se
de um controle relativamente simples e barato, sendo extensivamente utilizado tanto em sistemas de controles industriais como domésticos. O controle
on-o, evidentemente, não consegue manter a variável em um setpoint. O
comportamento da variável controlada equivale a uma oscilação próximo aos
valores equivalentes aos comandos on e o do controlador.
A função do controlador é receber o sinal da variável controlada e comparála com o sinal do valor de referência para produzir o sinal de controle (u(t))
de modo a fazer com que a saída (y(t)) seja cada vez mais próxima do valor
desejado. Portanto, a entrada do controlador é o sinal e(t) = referência (r(t))
- variável controlada (y(t)). Os vários tipos de controladores em
"feedback"
diferem no modo que eles relacionam a saída y(t) com a referência r(t). O sinal de saída de um controlador "feedback"
ON-OFF depende de sua constru-
ção e seu sinal atuante pode ser um sinal pneumático (ar comprimido) para
controladores pneumáticos ou um sinal elétrico para controladores elétricos.
50
3.2 Identicação de Sistemas
A identicação de sistemas é uma área que estuda técnicas alternativas
de modelagem matemática de sistemas. A modelagem matemática é área
do conhecimento que estuda maneiras de desenvolver e implementar modelos
matemáticos de sistemas reais. A identicação de sistemas é um dos problemas básicos em teoria de controle. No caso de sistemas lineares, uma
abordagem para identicação é construir uma função de transferência representando o comportamento do processo, em tempo discreto ou contínuo,
usando o "Princípio da Superposição", sendo que o estado inicial é suposto
ser zero. As funções de transferência são funções que modelam o comportamento dinâmico de um par entrada-saída de um sistema, ou seja, descrevem
como uma determinada entrada é dinamicamente "transferida"para a saída
do sistema.
A identicação de sistemas não-lineares é difícil, pois, o princípio da superposição não pode ser usado, e a relação entrada-saída pode depender do
estado atual e/ou histórico do sistema. Além disso, o sistema pode ter muitos
estados para os quais a saída é constante ou zero.
O processo de modelagem de um determinado sistema dinâmico pode
resultar num modelo de estrutura complexa. Em tais casos, métodos de redução de modelos podem ser utilizados para se obter uma representação mais
simples do processo. Os sistemas híbridos inteligentes representam um direcionamento alternativo para a solução de problemas em sistemas de controle
e identicação, principalmente aqueles que envolvem não-linearidades.
3.3 Controlador Centrífugo
O controle automático através de regulador centrífugo (Figura 3.4) foi
desenvolvido por James Watt em 1788 (64). Baseia-se no princípio de reação
ao comportamento anormal do processo. Seu funcionamento se dá através
de mecanismos que utilizam a força centrífuga para realizar uma ação de
51
Figura 3.4: Sistema de Controle de Velocidade (64).
correção na variável controlada.
O regulador é ajustado de modo que, à velocidade desejada, não haja uxo
de óleo sob pressão em ambos os lados do interior do cilindro de potência. Se
a velocidade real cai abaixo do valor desejado, devido a um distúrbio, então
a diminuição na força centrífuga do regulador de velocidade faz com que a
válvula de controle se mova para baixo, fornecendo mais combustível, e a
velocidade do motor aumente até atingir o valor desejado. Por outro lado,
se a velocidade do motor aumenta acima do valor desejado, então o aumento
da força centrífuga do regulador de velocidade faz com que a válvula de
controle se desloque para cima. Isso diminui o suprimento de combustível, e
a velocidade do motor é reduzida até atingir o valor esperado.
Nesse sistema de controle de velocidade, a planta (sistema a controlar) é
o motor e a variável controlada é a velocidade do eixo do motor. A diferença
entre a velocidade desejada e a velocidade real é o sinal de erro. O sinal
de controle (quantidade de combustível) a ser aplicado à planta (motor) é o
sinal atuante.
52
3.4 Algoritmo de Controle PID
O algoritmo PID (Proporcional Integral Derivativo) é o controlador Feed-
back mais popular utilizado na indústria de processo. É um algoritmo robusto
de fácil compreensão que pode fornecer um excelente controle de desempenho,
apesar das características variadas dinâmicas da planta de processo (68).
Estima-se que mais que 95% dos controles industriais são baseados em
algoritmos PID. Apesar do algoritmo básico ser o mesmo, existem pequenas diferenças entre os controladores PID, bem como diferentes
hardware
de execução para implementá-los, como os PACs (programmable automation
controllers), PLCs (programmable
logic controllers, conhecido no Brasil como
CLP - controlador lógico programável) e microcontroladores (69).
Considerando o setor industrial dos países desenvolvidos, pesquisas realizadas e apresentadas em artigos técnicos e cientícos têm demonstrado que
mais de 90% dos controladores são do tipo PID (70). O controlador PID
de estrutura xa, ainda corresponde a uma das estruturas de controle mais
utilizada a nível industrial devido à sua simplicidade de implementação e
capacidade de satisfazer a maioria dos requisitos de projeto (71). Entretanto, mesmo sendo uma estratégia conhecida e dominada pelos engenheiros
de controle, aspectos de sintonia continuam sendo, a nível de engenharia e
pesquisa, um desao (72).
Os controladores PID, são encontrados em diversos tipos de aplicações,
principalmente nas indústrias. Constituem a estratégia de controle mais
utilizada na indústria ao longo de muitos anos, sendo na maioria dessas, sucientes apenas para garantir um bom desempenho do processo controlado.
Contudo, este bom desempenho só ocorre quando o controlador é ajustado
de forma adequada, sendo esta a maior diculdade de sua utilização. Os
métodos de sintonia de controladores PID's, utilizam uma função de transferência como modelo da planta, sendo a mais utilizada a função de primeira
ordem com atraso (73), (71) e (74). Assim, para a obtenção do controlador
existem duas etapas: identicação da planta por uma função de transferência
e sintonia dos parâmetros do controlador.
53
Sua popularidade se deve ao fato de ser simples de ajustar e ter, no mercado, uma grande variedade de ferramentas que possibilitam a implementação de maneira fácil e prática. Um exemplo é que todo CLP, por mais simples
que seja, possui o algoritmo PID pronto para ser usado. Existe até aqueles
que possuem ferramentas de auto-ajuste reduzindo ainda mais necessidade
de ter uma pessoa qualicada para ajustá-lo.
Após 60 anos da publicação das primeiras regras sistemáticas de sintonia
de parâmetros do controlador PID (Nichols e Ziegler), e com a publicação de
milhares de artigos de sintonia de controlador PID, seria de se esperar que
a prática no projeto de malhas de controle industrial estivesse mais próxima
da realidade teórica desenvolvida no meio acadêmico e cientíco. Entretanto,
dados da literatura têm mostrado que, mesmo com todo o avanço, as malhas
de controle PID não são adequadamente sintonizadas (71). (75) pesquisou
a indústria de manufatura (malhas de temperatura, uxo, vazão, pressão)
e mostrou que 30% das malhas opera em modo manual, 20% utiliza a sintonia do controlador que veio da fábrica não importando as características
especícas de cada malha ou suas condições de funcionamento, 30% apresentou problemas relativos ao pobre desempenho dos sensores e elementos de
atuadores.
O algoritmo PID usa o erro de três módulos distintos para produzir a
saída ou variável manipulada. A partir desses módulos encontrá-se as formas
de controle puramente proporcional, proporcional e integral, proporcional e
derivativo e proporcional, integral e derivativo. O controle puramente proporcional é um controle que atua de forma corretiva, onde a correção da variável
controlada é proporcional ao valor do sinal do erro (e). Esta é uma ação
simples e intuitiva que é bastante semelhante ao comportamento humano.
Se o objetivo de uma determinada atividade está longe, intuitivamente o
cérebro determina uma ação maior, e quando o objetivo se aproxima, um
pequeno passo é executado. A magnitude dessas ações pode ser considerada
como ganho do controlador (Kc), que obviamente podem induzir erros estacionários conhecidos como
oset. O aumento no ganho do controlador pode
reduzir o oset ou o erro permanente, mas a resposta tende a ser oscilatória
e em alguns casos tende a instabilidade do sistema. A função de transferên-
54
cia no domínio do tempo de um controlador proporcional pode ser descrita
conforme a Equação 3.1.
(3.1)
C(s) = Kc
A m de eliminar o erro estacionário (oset ), a ação integral é freqüentemente incluída. Dessa forma, a ação de controle atua em proporção direta
ao tempo integral do erro. O parâmetro de ajuste integral, que é chamado
de tempo de
reset ou o tempo integral é denido normalmente em minu-
tos. O algoritmo do controlador PI realiza continuamente as intervenções no
processo até que a diferença entre a SP e PV diminua até que o erro seja
zero (e = 0). Em processos que se caracterizam por ter constante de tempo
grande (mudanças lentas) este algoritmo torna-se ineciente. A função de
transferência no domínio do tempo de um controlador proporcional integral
pode ser descrita conforme a Equação 3.2.
(
1
C(s) = Kc 1 +
τ is
)
(3.2)
A ação derivativa usa a tendência da variável do processo em atingir o
valor de referência para fazer os ajustes necessários. A tendência do processo
é estimada usando a derivada do sinal de erro com relação ao tempo. A ação
derivativa associada com a ação proporcional (PD) resulta em uma correção
antecipada a um desvio que ainda não aconteceu conhecida também de supercorreção (76). Como esta ação de controle depende somente da razão da
variação do desvio e não da amplitude deste, não deve ser utilizada sozinha,
pois tende a produzir movimentos rápidos no elemento nal de controle tornando o sistema instável. No entanto, para processos com grandes constantes
de tempo, pode vir associada à ação proporcional e principalmente às ações
proporcional e integral. Esta ação não deve ser utilizada em processos com
resposta rápida e não pode ser utilizada em qualquer processo que apresente
ruídos no sinal de medição, tal como vazão, pois neste caso a ação derivativa
no controle provoca rápidas mudanças na medição devido a estes ruídos. Isto
causa grandes e rápidas variações na saída do controlador, o qual mantem a
válvula em constante movimento, danicando-a e levando o processo à insta-
55
bilidade. A função de transferência no domínio do tempo de um controlador
proporcional derivativo pode ser descrita conforme a Equação 3.3.
(3.3)
C(s) = Kc + τ ds
O controlador PID é o algoritmo de controle que soma três tipos de ações
de controle. A ação proporcional, integral e derivada no domínio do tempo
pode ser visto na a Equação 3.4. Devido à sua relativa simplicidade, além
de um desempenho satisfatório, que é capaz de proporcionar uma ampla
gama de processos, tornou-se, na prática, o controlador mais utilizado em
ambientes industriais. Uma pesquisa observou-se que de mais de 11.000
malhas de controle analisadas em diversas plantas (renarias), cerca de 97%
eram controladas com o algoritmo PID (71). A função de transferência de
um controlador proporcional integral derivativo no domínio de Laplace pode
ser descrita conforme a Equação 3.5.
1
u(t) = Kc(e(t) +
τi
∫
t
e(τ )dτ + dτ
0
C(s) = Kc(1 +
de(t)
)
dt
1
) + τ ds
τ is
(3.4)
(3.5)
3.4.1 Variações do Controle PID
As variações mais comuns do algoritmo PID são: o ISA e paralelo.
3.4.1.1 PID Ideal
O modelo padrão é chamado às vezes o algoritmo PID ISA ou algoritmo
ideal, como visto na Figura 3.5. As ações proporcionais, integrais e derivativas não interagem no domínio do tempo. Este algoritmo admite zeros
complexos, o que é útil quando os sistemas de controle possuem pólos oscilatórios. A função de transferência de um controlador proporcional integral
derivativo no domínio de Laplace pode ser descrita conforme a Equação 3.6.
56
Figura 3.5: Esquema do PID ISA (adaptado de (78)).
C(s) = Kc(1 +
1
+ TDs )
TI s
(3.6)
3.4.1.2 PID Paralelo
O PID paralelo (Figura 3.6) é dito paralelo, pois as ações proporcionais,
integrais e derivativas são calculadas em paralelo e depois somadas. A função de transferência de um controlador proporcional integral derivativo no
domínio de Laplace pode ser descrita conforme a Equação 3.7.
Figura 3.6: Esquema do PID Paralelo (adaptado de (78)).
(
C(s) =
1
Kc +
+ TDs
TI s
)
(3.7)
57
3.5 Sintonia Para Controladores PID
A tarefa de sintonia de controladores Proporcional, Integral e Derivativo,
na maioria dos casos é realizada de forma empírica pelos operadores e técnicos
responsáveis pelo processo sob controle. A tarefa basicamente consiste em
variar os ganhos do controlador e avaliar o impacto destas variações junto
à variável de saída do processo. Diversos autores poropõem métodos para
sintonia de controladores PID's, entre esses métodos destacam-se segundo
(40): Ziegler e Nichols em (1942), CHR (Chien, Hrones e Reswick) em (1952),
CC (Cohen e Coon) em (1953), Integral do Erro (Lopez et al.) em (1967),
Relés (Astrom e Hagglung) em (1984) e MMC (Modelo Interno) em (1986).
Em 1942, Ziegler e Nichols publicaram um trabalho que, com base em
alguns dados experimentais do processo, o operador fosse capaz de determinar
um conjunto de parâmetros iniciais, Kp , Ki e Kd de controladores tipo PID.
Segundo (64), Ziegler e Nichols propuseram regras para determinação de
valores do ganho proporcional Kp , do tempo integral Ti e do tempo derivativo
Td baseadas na característica da resposta temporal de uma planta. Existem
dois métodos denominados regras de Ziegler e Nichols: o primeiro em malha
aberta e o segundo em malha fechada.
No primeiro método, obtem-se experimentalmente a resposta da planta
a uma entrada em degrau unitário, conforme a Figura 3.7. Se a planta não
possui integradores, nem polos complexos conjugados dominantes, então essa
curva de resposta ao degrau unitário pode ter um aspecto de um S, como
mostra a Figura 3.8.
A Função de transferência C(s)/U(s) pode ser aproximada por um sistema
de primeira ordem com atraso de transporte, conforme a Equação 3.8.
K
C(s)
=
U (s)
τs + 1
(3.8)
A curva com o formato em S pode ser caracterizada por duas constantes:
o atraso L e a constante de tempo T. O atraso e a constante de tempo são
determinados desenhando-se uma linha tangente no ponto de inexão da
58
Figura 3.7: Resposta ao degrau unitário em malha aberta (64).
curva com o formato S e determinando-se a intersecção da linha tangente
com o eixo dos tempos e a linha c(t) = K, como mostra a Figura 3.8.
Figura 3.8: Curva de resposta em forma S (64).
Ziegler e Nichols sugeriram escolher os valores de Kp , Ki e Kd de acordo
com a Tabela 3.1.
Tabela 3.1: Sintonia de Ziegler e Nichols para degrau unitário (64).
Tipo de Controlador
P
PI
PID
Kp
Ti
Td
T/L
∞
0
0,9T/L L/0,3
0
1,2T/L
2L
0,5L
No segundo método, deni-se primeiro Ti =∞ e Td =0. Utiliza-se somente
a ação proporcional, conforme a Figura 3.9, aumenta-se o valor de Kp de
59
0 ao valor crítico Kcr , no qual a saída exibe uma oscilação sustentada pela
primeira vez (Se a saída não exibe uma oscilação sustentada para qualquer
valor que Kp pode assumir, então esse método não se aplica). Portanto, o
ganho crítico Kcr é determinado utilizando o método do lugar das raízes e
o correspondente período Pcr é determinados pela frequencia de oscilação
crítica sustentada ωcr , onde 2π /ωcr = Pcr , como pode ser visto na Figura
3.10.
Figura 3.9: Sistema de malha fechada com controlador proporcional (64).
Figura 3.10: Oscilação sustentada com período Pcr (64).
Ziegler e Nichols sugeriram escolher os valores de Kp , Ki e Kd , baseados
no ganho crítico Kcr e período crítico Pcr de acordo com a Tabela 3.2.
3.6 Controle de Vazão
A medição exata do uxo de uido é muito importante em muitas aplica-
60
Tabela 3.2: Sintonia de Ziegler e Nichols baseada em Kcr e Pcr (64).
Tipo de Controlador
P
PI
PID
Kp
0,5Kcr
0,45Kcr
0,6Kcr
Ti
Td
∞
0
Pcr /1,2
0
0,5Pcr 0,125Pcr
ções industriais. A qualidade e desempenho de diversos processos industriais
exigem determinadas vazões de uxo. O custo de alguns liquidos e gases,
como exemplo os combustiveis, tem como parâmetro de valor o uxo medido através de um sistema de monitoramento, tornando-se necessário para
efeitos de contabilidade para medir com precisão e controlar a taxa de uxo.
Segundo (77), a vazão é a terceira grandeza mais medida nos processos industriais. As aplicacões são muitas, indo desde aplicações simples como a medição de vazão de água em estações de tratamento e residencias, até medição
de gases industriais e combustíveis, passando por medições mais complexas.
Para (78), os controladores PI são mais comuns no controle de vazão, pois
eles eliminam o erro estacionário e têm velocidades de resposta aceitáveis na
maioria dos ambientes industriais. Segundo o mesmo autor, deve-se utilizar
um ganho baixo (banda proporcional PB ≈ 150) para reduzir o efeito dos
sinais ruidosos (uxo de turbulência e também para não usar controle deri-
reset baixo (aproximadamente 0,1
min / repeticão) para alçancar rapidamente o setpoint de monitoramento.
vativo). Utiliza-se também um tempo de
3.6.1 Modelamento da Equação de Bernoulli
A forma simples do princípio de Bernoulli é válida para os uxos incompressíveis como a maioria dos líquidos e também para os uxos compressíveis
(gases), onde o processo é inteiramente isobárico ou isocórico e que a transferência é realizada em baixos números de Mach. De acordo com (79), o uxo
é incompressível se Ma < 0,3 ou compressível se Ma > 0,3. O último regime
é ainda dividido em sub-sônico (Ma < 1), trasônico (0,8 < Ma < 1,2), supersônico (Ma > 1), e hipersônico (Ma > 5). O número de Mach é uma variável
adimensional que representa a velocidade de um objeto através de um líquido
61
ou a velocidade de um uido sobre um objeto em relação à velocidade do som
no uido. Bernoulli desenvolveu o seu princípio de observações sobre os líquidos, e sua equação é aplicável somente aos uidos incompressíveis conforme
a Equação 3.9.
1
1
P1 + ρV12 + ρgh1 = P2 + ρV22 + ρgh2 = cte
2
2
(3.9)
Assumindo que os pontos de medição estejam em uma tubulação horizontal ou ainda que as mudanças na altura acima de um plano de referência
são insignicantes, pode-se desperezar as alturas h1 e h2 . Existem inúmeras equações, cada uma adaptada a um aplicativo especíco, mas todas são
análogas à equação de Bernoulli. Em velocidades muito baixas (talvez até
1/3 da velocidade do som no líquido) é possível usar os princípios fundamentais da física para desenvolver equações semelhantes aplicável aos uidos
compressíveis. A equação da continuidade estabelece que se a taxa de uxo
global de um sistema não está mudando com o tempo, então a taxa de uxo
em qualquer parte do sistema é constante. Uma forma adequada para uso
em dinâmica de uidos compressíveis pode ser dada pela Equação 3.10.
Q = A1 V1 = A2 V2 =⇒ V2 =
A1
V1
A2
(3.10)
Dividindo a Equação 3.9 por ρ é possível determinar a velocidade do uido
na tubulação em função da pressão diferencial do gás gerada a montante e
jusante da válvula de controle e a densidade do gás, conforme a Equação
3.11.
V12 = V22 +
2△P
ρ
(3.11)
Substituindo a Equação 3.11 na Equação 3.10, obtem-se a Equação 3.12.
√
Q = A1 V1 = A1
2△P
1 2
ρ(1 − ( A
))
A2
(3.12)
A equação de Bernoulli não pode ser diretamente usada para escoamentos
62
reais, já que na prática há perda de carga por causa da viscosidade do uido
e da rugosidade da tubulação. Segundo (80), a Equação 3.12 é puramente
teórica, principalmente pelo fato de se considerar que nas seções 1 (A1 ) e
2 (A2 ) as velocidades são uniformemente distribuídas e iguais a V1 e V2 ,
respectivamente. Um coeciente adimensional de descarga Cd é incluído para
levar em consideração esse fator. Os valores de Cd são resultado de estudos
experimentais realizados para diversos tipos de restrições industrialmente
empregados. De acordo com o mesmo autor, o coeciente de descarga é
denido como a razão real (Qr) e a vazão teórica (Qt), conforme a Equação
3.13.
Cd =
Qr
Qt
(3.13)
A partir da Equação 3.13, dene-se o coeciente de vazão K, dado pelo
produto do coeciente de descarga Cd e pelo fator de velocidade de aproximação E, denida como a Equação 3.14:
(3.14)
K = CdE
Onde o fator de velocidade de aproximação E é calculado pela Equação
3.15
E=√
1
1 − β4
(3.15)
O coeciente β é denido pela relação entre diâmetro do medidor e da
tubulação (ϕ medidor/ϕ tubulação).
Aplicando a Equação 3.14 na Equação 3.12 é obtida a Vazão Corrigida
(Qc), conforme a Equação 3.16.
√
Qc = KA1 V1 = KA1
2△P
A1 2
ρ(1 − ( A
))
2
(3.16)
Os coecientes de descarga (Cd) e de vazão (K) são determinados empiricamente e tabelados em função do diâmetro interno dos tubos e o número de
63
Reynolds (Re) que é um parâmetro adimensional denido pela relação entre
as forças de inércia (rugosas) do escoamento e as forças viscosas. (81). O
número de Reynolds é denido pela Equação 3.17.
Re =
ρϑD
µ
(3.17)
Sendo:
• ϑ - velocidade média do uido;
• µ - viscosidade dinâmica do uido;
• ρ - massa especíca do uido;
• D - diâmetro interno do tubo.
O fator determinante nos escoamentos em tubulações é a perda de energia
gerada pelos atritos internos do uido e pelos atritos entre este e a tubulação.
Neste caso estes atritos são gerados pelas asperezas das paredes dos tubos ou
ainda em função da turbulência (movimento caótico das partículas) gerada
em função de variações de direção ou da própria seção do escoamento. O
número de Reynolds determina o regime de escoamento dos uídos, que pode
ser laminar ( Re < 2000), crítico (2000 ≤ Re ≤ 4000) e turbulento (Re >
4000).
A correção do equacionamento utilizado em vazão de uidos compressíveis para vazão de uídos incompressíveis pode ser obtida multiplicando a
Equação 3.16 por um fator de expansão isentrópico ε, conforme a Equação
3.18.
(3.18)
Qccomp = εQcincomp
Os valores de ε variam segundo a norma de medição adotada e também
em relação aos pontos de tomada de pressão diferencial sobre o medidor.
Pela norma ISO 5167/98 seu valor é dado pela Equação 3.19.
ε = 1(0, 351 + 0, 256β 4 + 0, 93β 8 )(1 − (
P2 1
)k )
P1
(3.19)
O fator de expansão ε representa as variações de densidade devido ao
64
uido passar através de uma contração imposta pelo elemento primário.
3.7 Controlador Lógico Programável
O Controlador Lógico programável (CLP) é um dispositivo que foi inventado para substituir os circuitos seqüenciais de relés para controle de
máquinas e/ou processos. Tais sistemas de controle, apesar de funcionais,
apresentavam problemas de ordem prática bastante relevantes. Como as instalações possuíam uma grande quantidade de elementos, a ocorrência de uma
falha qualquer signicava o comprometimento de várias horas ou mesmo dias
de trabalho de pesquisa e correção do elemento faltoso. Além disto, pelo
fato dos relés apresentarem dimensão física elevada, os painéis ocupavam
grande espaço, o qual deveria ser protegida contra umidade, das temperatura, gases inamáveis, oxidações, poeira, etc. Outro fator ainda comprometedor das instalações a relés era o fato de que como a programação lógica do
processo controlado era realizada por interconexão elétrica com lógica xas
(hardwired ), eventuais alterações na mesma exigiam interrupções no processo produtivo a m de se reconectarem os elementos. Interrupções estas
nem sempre bem-vindas na produção industrial, como conseqüência ainda,
tornava-se obrigatória a atualização das listas de ação como garantia de
manter a documentação do sistema.
Segundo a ABNT (Associação Brasileira de Normas Técnicas), o CLP
hardware e software compatíveis
com aplicações industriais. Para a Nema (National Electrical Manufacturers
Association ) é um aparelho eletrônico digital que utiliza uma memória proé um equipamento eletrônico digital com
gramável para o armazenamento interno de instruções para implementações
especícas, tais como lógica, seqüenciamento, temporização, contagem e aritmética, para controlar, através de módulos de entradas e saídas, vários tipos
de máquinas ou processos.
65
3.7.1 Estrutura do CLP
Existem estruturas modulares, onde a unidade central de processamento
(UCP) e todos os módulos de entrada e saída se encontram no mesmo rack e
compactas, onde a UCP e todos os módulos de entrada e saída se encontram
separados e vão sendo montadas nos slots em função da conguração exigida,
mas ambas tem o mesmo princípio de funcionamento (82).
Um CLP é basicamente um pequeno computador dedicado, em sua estrutura física encontra-se:
• Unidade Central de Processamento - UCP
• Memória do tipo
ROM para armazenamento do Firmware (programa
onde se encontram os principais códigos de operação da máquina)
• Memória RAM para armazenamento de dados e programas do usuário.
• Dispositivos de entrada e saída para a comunicação com o exterior
3.7.2 Memória do CLP
O mapa de memória de um CLP possui uma organização xa ou seja,
existe alocação reservada para entradas, saídas e outras variáveis. Dependendo da necessidade, existem varias congurações de tamanho dessas memórias. O sistema de memória é uma parte de vital importância no processador
de um CLP, pois armazena todas as instruções assim como todos os dados
necessários para executá-las. Há diferentes tipos de sistemas de memória. A
escolha de um determinado tipo de memória depende do tipo de informação
que se deseja armazenar e da forma como a informação será processada pela
UCP. As informações armazenadas num sistema de memória são chamadas
palavras de memória e são formadas sempre pelo mesmo número de bits.
A capacidade de memória de um CLP é denida em função do número de
palavras de memória previstas para o sistema e pode ser representada por
um mapa chamado mapa de memória (82).
A Tabela 3.3 mostra alguns tamanhos de memória dos CLP.
66
Tabela 3.3: Exemplo de Espaços de Memória dos CLP's (84).
Tamanho da Memória
8
16
32
Tipo
byte
word
double word
Binário
28
216
232
Decimal
255
65535
4294967295
Mapa de memória de um controlador programável pode ser dividido em
cinco áreas principais.
• Memória Executiva (
ROM e PROM ): Armazena o sistema operacio-
nal, o qual é responsável por todas as funções operacionais do CLP.
• Memória do Sistema (RAM ): Armazena resultados e/ou informações
intermediários, gerados pelo sistema operacional.
• Memória de
Status (RAM ): Armazena o estado dos sinais de entrada
e saída.
• Memoria de Dados(RAM ) . Armazenar dados referentes ao programa
do usuário.
• Memória do Usuário (RAM e EPROM ): Armazena o programa de controle desenvolvido pelo usuário.
3.7.3 Linguagens de Programação
Desde o seu aparecimento até hoje, muita coisa evolui nos controladores
lógicos. Esta evolução está ligada diretamente ao desenvolvimento tecnológico da informática em suas características de software e de hardware. O que
no seu surgimento era executado com componentes discretos, hoje se utiliza
de microprocessadores e microcontroladores de última geração, usando técnicas de processamento paralelo, inteligência articial, redes de comunicação,
eldbus. Até recentemente, não havia nenhuma padronização entre fabricantes, apesar da maioria utilizar as mesmas normas construtivas. Porém,
pelo menos ao nível de
software aplicativo, os controladores programáveis
67
podem se tornar compatíveis com a adoção da norma IEC 1131-3, que prevê
a padronização da linguagem de programação e sua portabilidade.
3.7.3.1 Norma IEC 61131-3
A norma IEC 61131 representa uma combinação e continuação de diferentes normas internacionais (IEC 50, IEC 559, IEC 617 - 12, IEC 617-13,
IEC 848, ISO / AFNOR, ISO / IEC 646, ISO 8601, 7185, ISO 7498). Estas
incluem regras sobre o código de caracteres utilizado, a denição da nomenclatura utilizada ou a estrutura das representações grácas (83). A norma
IEC 61131 já está no mercado desde 1992, quando suas primeiras partes
foram publicadas. Sua adoção pelos diversos fabricantes de sistemas de controle é uma realidade inegável, principalmente da parte 3, a mais conhecida.
Entretanto, as diversas implementações da norma possuem diferenças que
não comprometem seus principais benefícios, mas dicultam o entendimento
por parte dos usuários.
Com o objetivo de padronizar a linguagem na descrição dos sitemas automatizados a norma IEC 61131-3, estabelecida pelo
International Electro-
technical Commission (IEC), instituiu uma nomeclatura internacional para
sistemas automáticos. Essa norma divide um sistema automatizado em duas
partes distintas:
•
Parte Operativa (OP): corresponde ao processo físico a automatizar
que opera sobre a matéria-prima e o produto. É constituida pelos atuadores, que realizam as operações, agindo sobre componentes e dispositivos de automação, tais como válvulas, atuadores, motores, lâmpadas,
etc.
•
Parte Comando (PC): caracteriza-se por receber as informações vindas do operador e/ou do processo a ser controlado e por emitir informações ao sistema controlado, coordenando assim, as ações da parte
operativa.
A parte três da norma IEC 61131 é dividida basicamente em duas sub-
68
partes: Elementos comuns e Linguagens de Programação. Apesar das linguagens de programação serem mais difundidas no mercado de automação
industrial, os elementos comuns denem as principais características da IEC
61131-3. Cada uma das cinco linguagens de programação deve trabalhar
com todos os elementos comuns denidos pela norma. As cinco linguagens
denidas pela norma são:
• Textuais: Lista de Instruções (IL) e Texto Estruturado (ST)
• Grácas: Diagrama
Ladder (LD) e Diagrama de Blocos Funcionais
(FBD)
• Estruturação de Programas (Textual ou Gráca): Seqüenciamento Gráco de Funções (SFC)
3.7.4 Interfaces de Comunicação dos CLP
3.7.4.1 Módulos de Entradas e Saídas Digitais
Os módulos de entradas e saídas são interfaces entre os elementos de
campo (sensores e atuadores) e a lógica de controle de um controlador programável. Estes módulos são constituídos de cartões eletrônicos, cada qual
com capacidade para receber um certo número de variáveis.
O objetivo principal da interface é permitir que os diferentes sinais recebidos ou enviados dos dispositivos em campo sejam reconhecidos pela UCP.
Os sinais recebidos de sensores são, por exemplo, os botões, interruptores
de limite, sensores analógicos, selectores e interruptores
thumbwheel que são
conectados a terminais sobre as interfaces de entrada. Os dispositivos que
serão controlados, como motores acionadores de partida, válvulas solenóides,
lâmpadas, válvulas e posição, estão ligados aos terminais das interfaces de
saída. A fonte de alimentação do sistema fornece todas as tensões necessárias
para o bom funcionamento da UCP, alimentação da interface e chaveamento
dos módulos de entrada e saída. Na Figura 3.11 pode visto o esquema de
interface das entradas e saídas do CLP.
69
Figura 3.11: Interface de Entradas e Saídas (84).
Existe uma variedade muito grande de tipos de cartões, para atender às
mais variadas aplicações nos ambientes industriais. Mas apesar desta grande
variedade, os elementos que informam a condição de grandeza aos cartões,
são dos tipos:
• Elemento Discreto: Trabalha com dois níveis denidos;
• Elemento Analógico: Trabalha dentro de uma faixa de valores.
As entradas digitais são encontradas em tensão contínua (geralmente 24
Vdc) ou em corrente alternada (110 V ou 220 V).
As entradas em corrente contínua possuem duas formas de chaveamento,
sendo uma utilizada para sensores que possuem a conguração NPN ("negativo para a entrada"), que permite um uxo de corrente da entrada para
o potencial negativo da fonte de alimentação e outra PNP ("positivo para a
entrada"), que permite um uxo de corrente do potencial positivo da fonte de
alimentação para a entrada. Nas Figuras 3.12 e 3.13 são mostradas as congurações de entradas em corrente contínua NPN e PNP respectivamente.
70
Figura 3.12: Conguração de Entrada NPN (83).
Figura 3.13: Conguração de Entrada PNP (83).
Os Módulos ou Interfaces de Saída adequam eletricamente os sinais vindos
do microprocessador para que possam atuar nos circuitos controlados. As
saídas digitais admitem apenas dois estados : ligado e desligado, e podem
ser construídas de três formas básicas : Saída digital à relé , saída digital à
transistor e saída digital à triac.
De acordo com o tipo de elemento de comando da corrente das saídas,
estas apresentam características que as diferem como as seguintes:
• Transístor - promove comutações mais velozes, mas só comporta cargas
de tensão contínua
• Triac - tem maior vida útil que o tipo a contato seco, mas só pode
acionar cargas de tensão alternada
• Contato seco (relé) - pode acionar cargas alimentadas por tensão tanto
contínua quanto alternada.
3.7.4.2 Módulos de Entradas e Saídas Analógicas
A interface de entrada analógica contém os circuitos necessários para receber sinais analógicos de tensão ou corrente dos dispositivos de campo. A
tensão ou a corrente de entrada é convertida para um código digital proporcional ao valor analógico, através de um conversor analógico digital (A/D).
Este código digital é armazenado na memória imagem do controlador como
um registro. O valor analógico é geralmente expresso como um valor decimal
(BCD). A resolução das entradas analógicas é uma informação importante,
71
pois de acordo com o número de bits do conversor A/D é que se dene a
menor parcela que pode ser lida. Ou seja, uma entrada com um maior número de bits permitirá uma melhor representação da grandeza analógica. Os
conversores A/D normalmente são de 10 ou 12 bits As faixas de valores de
tensão e corrente para entradas analógicas mais utilizadas na indústria são:
• 0 a 20 mA;
• 4 a 20 mA;
• 0 a 50 mA;
• 1 a 5 Vdc;
• 0 a 10 Vdc;
• -10 a 10 Vdc.
3.7.4.3 Módulo PID
O módulo de controle proporcional-integral-derivativo (PID) é uma interface utilizada no processo que requer aplicações de controle em malha fechada
contínua empregando o algoritmo PID. Esses módulos fornecem ações proporcional, integral e derivativa, que controlam parâmetros das variáveis de
entrada do sistema, tais como pressão, nivel, vazão e temperatura.
O módulo PID recebe a variável de processo em formato analógico e
calcula a diferença de erro entre o valor real e o valor de
setpoint. Em
seguida, usa essa diferença de erro no cálculo algoritmo utilizado para iniciar
a correção do desvio através da manipulação de uma variável de saída do
controle.
Primeiro, o módulo formula uma ação de controle proporcional com base
em uma saída variável de controle que é proporcional ao valor de erro instantânea. Em seguida, o módulo PID inicia uma ação de controle integral
para fornecer ajuste adicional para a variável de controle de saída. Isto provoca uma alteração na variável do processo em proporção ao valor do erro
durante um período de tempo. Finalmente, o módulo inicia uma ação de
72
controle derivativo adicionando ainda mais a compensação para a saída do
controle. Esta ação provoca uma mudança na variável de controle de saída
proporcional à taxa de variação do erro. Estas três etapas fornecem a ação
de controle desejado.
Dependendo do módulo utilizado, as interfaces PID também podem receber os dados sobre o tempo de atualização da zona morta e do erro. O
tempo de atualização é a taxa ou período em que a variável de saída é atualizada. Além disso, alguns módulos também fornecem cálculos de raiz quadrada da variável de processo. Para fornecer este cálculo, o módulo executa
uma extração da raiz quadrada da variável do processo para obter uma saída
linearizada, que depois é usado pelo algoritmo PID. A Figura 3.14 mostra o diagrama de blocos do algoritmo PID que utiliza uma função de raiz
quadrada e um compensador
lead-lag, que é um componente do sistema de
controle que melhora a resposta de freqüência indesejável em um sistema de
controle
feedback.
Figura 3.14: Diagrama PID com raiz quadrada (83).
73
3.7.4.4 Módulos de Interface de Rede
Os módulos de interface de rede permitem uma série de CLP e outros
dispositivos inteligentes a comunicar e transmitir dados em alta velocidade.
Atualmente, muitos fornecedores fabricam produtos que são compatíveis com
diferentes ambientes de rede de CLP. Entre as mais populares redes estão:
• Nível de dispositivo redes de autocarros (por exemplo,
plex, etc), que são usadas por dispositivos discretos
• Processo de redes de campo (por exemplo,
CANbus, Seri-
Fieldbus e Probus ), que
são usados por dispositivos analógicos;
• Redes Ethernet / IEEE 802.3, usadas pelos CLP, CPU e computadores;
• Redes proprietárias;
Através do módulo de interface de rede toda a comunicação necessária
(conexões e protocolos) permite que uma mensagem seja repassada na rede.
Em geral, quando um processador ou outro dispositivo de rede envia um
mensagem, sua interface de rede transmite a mensagem através da rede na
velocidade da rede que estabelecida pela taxa de transmissão. A interface
de rede receptora aceita a transmissão e passa as informações para a UCP e,
se necessário, envia uma comando para o dispositivo de campo pretendido.
Dependendo do tipo e conguração da rede, um módulo de rede pode ser
conectado a uma distância de até 3048 m, com 100 a 1000 dispositivos (Nós).
Na Figura 3.15 pode ser visto uma rede de comunicação.
Independentemente do tipo de periférico e rede utilizada, deve-se conectar
os dispositivos ao CLP através de um meio físico.
Para que a comunicação entre o CLP e o PC se concretize, é necessário
que dois aspectos sejam observados quanto ao
se fala em
hardware e software. quando
hardware de comunicação, normalmente as UCP possuem pelo
menos uma porta serial que pode ser conectada a dispositivos externos. A
quantidade pode variar de acordo com o modelo e o fabricante dos CLP's.
(84).
74
Figura 3.15: Rede de comunicação (83).
Para tornar equipamentos diferentes compatíveis entre si, vários padrões
de nível físico foram desenvolvidos. Os mais usuais são: RS-232, RS-422 e
RS-485 (RS é uma abreviação de
Recommended Standard ), que relata a pa-
dronização de uma interface comum para comunicação de dados entre equipamentos, criados pela
Eletronic Industries Association (EIA). Os padrões
RS-232, RS-422 e RS-485 denem características mecânicas, elétricas, funcionais e procedurais para ativar, manter e desativar conexões físicas que se
destinam a transmitir bits entre dois dispositivos. Segundo (82) os principais
caracteristicas citadas pela (EIA) para estabelecer a comunicação são:
• Características mecânicas: denem o tamanho e a forma dos conectores, pinos, cabos, que compõem um circuito de transmissão
• Características elétricas: especicam os valores dos sinais elétricos (níveis de tensão e corrente) usados para representar bits, o tempo entre
75
mudanças desses valores. Determinam também as taxas de transmissão
e distâncias que podem ser atingidas.
• Características procedurais: especicam combinações e seqüências de
sinais que devem ocorrer para que uma interface do nível físico cumpra
o seu papel de receber e transmitir bits.
O meio físico RS232 nada mais é que um conjunto de normas que denem
comunicação serial ponto a ponto entre dois dispositivos. A norma RS232
dene os níveis de tensão, a temporização, o protocolo de troca de dados e a
disposição mecânica dos conectores. A interface RS232 tem como principal
atrativo a sua implementação simples e barata, sendo disponível como padrão
na maioria dos computadores atuais e antigos. As principais limitações da
interface RS232 se devem ao fato da mesma operar por níveis de tensão, sendo
extremamente suscetível a ruídos, o que inviabiliza a comunicão de maneira
conável em distâncias superiores a 10 ou 15 metros. Outra limitação é que o
padrão RS232 foi desenvolvido para ser uma comunicação ponto a ponto, não
permitindo que mais de dois dispositivos usem a mesma "linha de dados".
O padrão RS422 é uma evolução do padrão RS232 e tem como principal
novidade a implementação de linhas de transmissão balanceadas, o que torna
a comunicação extremamente imune a ruídos, permitindo o envio de informações à distâncias de até 1200 metros de maneira extremamente conável.
O padrão RS422 é mais utilizado em comunicações ponto a ponto, embora
seja possível utilizar o mesmo em pequenas redes. Para operação em rede
o número máximo de dispositivos que podem ser conectados é limitado pois
cada circuito de saída RS422 pode ser ligado no máximo a 10 entradas. Tambem não é possível a utilização de um único par de os para operar como
"barramento"ou seja, os dados são transmitidos por uma linha e recebidos
por outra. O principal uso do padrão RS422 é para estender a comunicação RS232 a grandes distâncias, de maneira transparente ao usuário sem a
necessidade de alterar programação e protocolos.
O meio RS485 é uma evolução do padrão RS422, tendo como principal enfoque a comunicação em rede, ou seja, com apenas um par de os é possível se
comunicar com diversos equipamentos em rede usando o mesmo barramento.
76
Assim como o RS422, o RS485 utiliza linha de dados balanceada, bastante
similar às linhas de dados da interface RS422, logo também permite comunicação em distâncias de até 1200 metros de maneira extremamente conável.
O uxo de dados podem ser divididos em:
• Canal
simplex : canal no qual a direção de transmissão é inalterada;
• Canal half-duplex : é um canal físico simples no qual a direção pode ser
revertida. As mensagens podem uir nas duas direções, mas nunca ao
mesmo tempo;
full-duplex : permite que mensagens sejam trocadas simultaneamente em ambas as direções. Pode ser visto como dois canais simplex,
• Canal
um canal direto e um canal reverso.
Nas Tabelas 3.4, 3.5 e 3.6 é dada as especicações da comunicação serial
RS232, RS 422 e RS485, respectivamente.
Tabela 3.4: Especicação da comunicação serial RS232 (83).
Tipo de Rede
Distância Máxima
Máxima Taxa de Transmissão
Nível Elétrico
Conectores
Canal de comunicação
Ponto a Ponto
15m
20kbps
nível lógico 0 (+5V à +15V) nível lógico 1 (-5V à -15V)
DB25 (por norma) DB9 (usual)
full-duplex (possibilidade half-duplex )
Tabela 3.5: Especicação da comunicação serial RS422 (83).
Tipo de Rede
Distância Máxima
Máxima Taxa de Transmissão
Nível Elétrico
Conectores
Canal de comunicação
Ponto a Ponto
1200m
10M
nível lógico 0 (+5V à +15V) nível lógico 1 (-5V à -15V)
DB25 (por norma) DB9 (usual)
full-duplex
77
Tabela 3.6: Especicação da comunicação serial RS485 (83).
Tipo de Rede
Distância Máxima
Máxima Taxa de Transmissão
Nível Elétrico
Conectores
Canal de comunicação
multi-ponto (até 32 transmissores ou
receptores)
1200m
10M bps
nível lógico 0 (+5V à +15V) nível lógico 1 (-5V à -15V)
não denido
half-duplex
3.7.5 Protocolos de comunicação
Protocolos de comunicação são conjuntos de regras que denem a forma
como os dispositivos devem se comunicar. Existem protocolos que denem
desde as características físicas de interligações entre dispositivos, até como
deve ocorrer o gerenciamento das mensagens.
Para (82) os protocolos de comunicação podem ser divididos em 3 níveis,
conforme a Figura 3.16.
Nível de Planta:
no nível da planta temos a supervisão e gerenciamento
de todo processo que normalmente ocorre através de um
software supervisó-
rio. De uma forma resumida, as ações associadas a este nível são:
• Supervisão
• Comando
• Planejamento
• Banco de Dados.
Nesse nível pode-se citar como exemplo as redes:
e
Fieldbus Foundation HSE.
Nível de Controle:
Pronet, Ethernet/IP
este nível permite o controle sobre as ações do nível
de campo em função das denições e comandos dados pelo nível da planta.
De uma forma resumida, as ações associadas a este nível são:
78
Figura 3.16: Níveis de Rede (83).
• Controle em tempo real
• Segurança
• Interface
Nesse nível pode-se citar como exemplo as redes:
APR03M e
Controlnet.
Nível de Campo:
Probus FMS, Modbus,
As redes que fazem parte deste nível constituem a
base na hierarquia da comunicação industrial. Através deste nível torna-se
possível a aquisição e atuação direta dos dados de chão de fábrica como valor
de pressão, situação de um motor, ligamento e desligamento de uma válvula.
De uma forma resumida, as ações associadas a este nível são:
• Aquisição das variáveis
• Atuação sobre equipamentos.
79
Probus DP e PA,
AS-Interface, Interbus, Devicenet, APR03M e Fieldbus Foundation H1.
Nesse nível pode-se citar como exemplo as redes:
Na Tabela 3.7, seguem abaixo as características principais entre os níveis
de rede:
Tabela 3.7: Principais características entre os níveis de rede (83).
Característica
Tamanho da Mensagem
Tempo de Resposta
Planta
Mbytes
Segundos
Controle
Kbytes
5 a 100ms
Campo
bytes
ms
Distância Máxima
Sem Limitação
sim
não
Elétrico e
Óptico
Grande
1Km
1Km
Sensor
bits
Micro
segundos
100m
sim
não
Elétrico e
Óptico
Grande
sim
sim
Elétrico e
Óptico
Média
não
sim
Elétrico e
Óptico
Pequena
Redundância
Áreas Classicadas
Meio Físico
Cobertura Geográca
Num ambiente industrial, cada vez mais complexo e competitivo, os fatores relacionados com a disponibilidade e segurança da informação assumem elevada relevância, tornando-se necessário garantir que a informação
esteja disponível e segura quando necessária, independentemente da localização geográca. Torna-se portanto necessário implementar mecanismos de
acessibilidade, mecanismos de segurança e mecanismos de tolerância a falhas.
O supervisório é visto como o conjunto de programas gerado e congurado
no programa básico de supervisão, implementando as estratégias de controle
e supervisão, que têm recursos como as telas grácas de interfaceamento
homem-máquina, a aquisição e tratamento de dados do processo, a gerência
de relatórios e alarmes.
3.8 Softwares Supervisórios
Os sistemas supervisórios são programas que permitem monitorar e controlar diversas variáveis de uma plnta de processo. Os sistemas supervisórios
podem ter uma arquitetura aberta, ligados em rede, permitindo que o uxo
80
de dados do processo ultrapasse o limite das paredes da empresa e percorra
o mundo através dos meios de comunicação existentes. Existem atualmente
vários sistemas supervisórios conhecidos no mercado:
• Fix - Fabricante Intellution;
• Intouch - Fabricante Wonderware
MR
Corporation;
• Wizcon - Fabricante Emation;
• RSView - Fabricante Rockwell Automation;
• Unisoft - Fabricante Factory Link;
• Elipse - Fabricante Elipse;
• Gênesis - Fabricante Iconics;
• Microcomputing - Fabricante Siemens;
• Cimplicity - Fabricante Ge-fanuc.
Apesar de existirem diferentes fabricantes de
softwares supervisórios,
os mesmos possuem características semelhantes, capazes de atender prérequisitos básicos funcionais de um projeto. Dentre as principais características podem-se citar:
• Interface de dados amigável, ou seja, apresentar visualização gráca
que facilite o entendimento do operador do sistema;
• Geração automática de relatórios, com o controle estatístico do sistema;
• Histórico de tendências (acompanhamento das variáveis controladas);
• Facilidade para interação com outros aplicativos (software );
• Acesso automático a banco de dados;
• Acesso compartilhado e remoto;
• Conexão em rede e por meio de modem ou rádio;
81
• Gerenciamento das condições de alarme.
Para se efetuar uma boa escolha de um software de supervisão, é necessário avaliar o produto, o sistema operacional, a conabilidade do fabricante e
do distribuidor, além do suporte local e dos drivers de comunicação disponíveis. Com a necessidade de distribuir a informação para a área corporativa
da empresa, esta escolha se torna muito mais importante. A menos de cinco
softwares de supervisão eram empresas,
como é o caso da Wonderware, Iconics, Intellution. No ano de 1998, alguns
fabricantes de Hardware entraram no mercado, como é o caso da G.E. Fanuc,
Allen-Bradley, Siemens. Algumas empresas de consultoria e revistas como a
Control Engineering e a Intech, dividem os softwares de supervisão em dois
anos, os principais fornecedores de
grupos:
•
MMI (Man Machine Interface )
softwares que têm a nalidade de servir como uma Interface Homem
Máquina, ou seja, estes softwares não têm a nalidade de controlar nenhuma
Os
parte da máquina ou processo, ou seja, se ocorrer qualquer problema durante a sua execução, não prejudicará a automação da máquina ou processo.
Normalmente estes
softwares apresentam facilidades de conguração, mas
normalmente estão limitados em segurança de dados, comunicação em rede,
comunicação remota, controles de processo. Os softwares
32,
Intouch, RS-View
Cimplicity, Elipse MMI e Unisoft fazem parte deste tipo.
•
SCADAS (Supervisory Control and Aquisition Data System )
As versões de
softwares que possuem as mesmas funções dos softwares
MMI mas podem efetuar controle, distribuir informações entres estações via
rede com performance e segurança. Estes
softwares normalmente são mais
robustos e conáveis para aplicações de grande porte e para aplicações distribuídas em varias estações. No Brasil os principais produtos que possuem
estas características são:
e Elipse SCADA.
FactoryLink, FIX, Wizcon, Genesis, WinCC, Citect
82
3.8.1 Supervisórios
SCADA
Os primeiros sistemas SCADA, basicamente telemétricos, permitiam informar periodicamente o estado corrente do processo industrial, monitorizando sinais representativos de medidas e estados de dispositivos, através de
um painel de lâmpadas e indicadores, sem que houvesse qualquer interface
aplicacional com o operador.
Atualmente os sistemas SCADA utilizam tecnologias de computação e
comunicação para automatizar a monitorização e controle dos processos industriais, efetuando a aquisição de dados em ambientes complexos, eventualmente dispersos geogracamente com apresentação de telas de modo amigável
para o utilizador, com recurso a interfaces Homem-Máquina.
Os sistemas SCADA melhoram a eciência do processo de monitorização
e controle, disponibilizando em tempo útil o estado atual do sistema, através
de um conjunto de previsões, grácos e relatórios, de modo a permitir a
tomada de decisões operacionais apropriadas, quer automaticamente, quer
por iniciativa do operador.
O Elipse
Windows é um software para a criação de aplicativos de super-
visão e controle de processos nas mais diversas áreas. Totalmente congurável
pelo usuário, permite monitorar variáveis de processo em tempo real, através
de grácos e objetos que estão relacionados com as variáveis físicas de campo.
Além disso, o usuário pode fazer acionamentos e enviar ou receber informações para os equipamentos de aquisição de dados. É possível ainda realizar
cálculos através de utilização de linguagem de programação, criar bases de
dados históricas, relatórios, receitas, e inclusive supervisionar e controlar um
processo à distância.
Para a execucao do Elipse SCADA, é exigido um computador (PC) compatível com a seguinte conguracão:
Pentium 200 MHz ou superior (ou equivalente);
• 32 MB de memoria RAM (64 MB recomendado);
• Processador
• Monitor e placa de video com resolucao 640x480;
• 10 MB de espaco livre em disco;
83
•
Microsoft Windows (XP, vista e Seven);
• Porta paralela ou USB.
software está disponível em quatro módulos: View, MMI, Professional
e Power. Todos os módulos acima possuem versão Congurador, Runtime,
e Master. O Congurador é destinado ao desenvolvimento de aplicações de
O
supervisão de processos. Para a realização de testes, o Congurador permite
rodar aplicações por até dez minutos. O
Runtime é utilizado para rodar
aplicativos de supervisão de processos após estes terem sido desenvolvidos
Master agrega na mesma ferramenta um
módulo de Congurador e um Runtime, permitindo portanto a conguração e
com o uso do Congurador. O
execução num só produto. Quando na ausência de um dispositivo de proteção
(hardkey ), o software pode ser executado em modo de demonstração.
Ainda como módulos adicionais, existem mais duas ferramentas que podem trabalhar em conjunto com qualquer dos produtos acima mencionados,
que são o Elipse
O Elipse
Watcher e Elipse Web.
Watcher é um "Add-on "para a monitoração, registro e trans-
missão digital de imagens em tempo real, possibilitando a visualização de
imagens com tamanho e denição programáveis pelo usuário, além de permitir a criação de banco de dados de imagens com busca por período ou evento
e transmissão de imagens em tempo real para estações remotas via rede local
Web trata-se de um servidor de aplicações de
supervisão para a Internet, onde através de um navegador como o Netscape
ou Internet Explorer é possível conectar-se a uma estação e receber/enviar
ou linha discada. Já o Elipse
dados em tempo real (85).
3.8.2 Estimadores de Mínimos Quadrados
Karl Friedrich Gauss formulou o principio dos mínimos quadrados (MMQ)
ao nal do século 18 para prever a trajetória de planetas e cometas a partir
das observações realizadas. Gauss estabeleceu que os parâmetros desconhecidos de um modelo matemático deveriam ser selecionados de modo que o
valor mais provável das grandezas desconhecidas é a que minimiza a soma dos
quadrados da diferença entre os valores atualmente observados e os valores
84
calculados multiplicados por números que medem o grau de precisão, onde
quanto mais precisa a medida, maior a ponderação (86).
O método dos mínimos quadrados é usado geralmente para o cálculo de
regressões lineares em conjuntos de dados estatísticos. O MMQ é um processo
de busca dos coecientes que minimizam a soma dos quadrados dos resíduos.
Para tanto, uma das condições é que a forma escolhida para a equação seja
adequada. O MMQ minimiza a soma dos quadrados dos resíduos. Quando a
distribuição dos resíduos é normal, as estimativas de máxima probabilidade
podem ser encontradas pelo Método dos Mínimos Quadrados. Neste caso,
sob as condições básicas, as estimativas do MMQ para os coecientes da
equação são as estimativas lineares não-tendenciosas de mínima variância.
A aproximação por mínimos quadrados consiste em encontrar a função
que "melhor se ajuste", ao conjunto de pontos dado e/ou coletados, minimizando o erro resultante do ajustamento, ou seja, pretende-se minimizar a
soma dos quadrados das diferenças entre os valores observados e os valores
obtidos pela aproximação (25). O estimador de minimos quadrados pode ser
dado pela Equação 3.20.
θ = [ϕT ϕ]−1 ϕT Y
(3.20)
Onde:
• θ - Estimador de Mínimos Quadrados;
• ϕT ϕ - Dimensão ;
• Y - Função linear das medidas.
O estimador dos mínimos quadrados é uma transformação linear sobre Y
e, assim, é denominado estimador linear (87).
3.8.3 Estimadores de Mínimos Quadrados Recursivo
Na implementação de um controle adaptativo em tempo real, o algoritmo
do estimador de parâmetros deve ser interativo, com o modelo do sistema
sendo atualizado a cada período de amostragem, quando novas medidas estão
85
disponíveis, ou seja, adequar-se às características do processo controlando ou
ressintonizar-se caso existam variações na dinâmica do processo.
O método de estimação dos mínimos quadrados recursivo (MQR) é um
dos mais populares e comumente utilizado em esquemas de identicação de
parâmetros (87), onde a quantidade de dados armazenados no estimador
recursivo é pequeno se comparado com o estimador não-recursivo.
Os algoritmos Recursivos (MQR) utilizam pouca memória e pequeno
esforço computacional. Em cada período de amostragem, novas medidas
tornam-se disponíveis e são utilizadas com o modelo atual para gerar um
novo erro de modelagem (87).
Em cada período de amostragem, novas medidas tornam-se disponíveis e
são atualizadas com o modelo atual para gerar um novo modelo estimado.
Por exemplo, no instante de tempo (t+1), novas medidas u(t+1) e y(t+1)
ocorrem. Em vez de recalcular o estimador dos mínimos quadrados, é interessante atualizar as estimativas anteriormente calculadas no instante t, θ (t),
para obter novas estimativas θ (t+1).
Outros nomes atribuidos na literatura ao estimador recursivo são: estimação sequencial, identicação em tempo real, identicação
on-line.
A forma recursiva é dada pela Equação 3.21, os parâmetros de ganho do
estimador e covariância podem ser calculados através das Equações 3.22 e
3.23 respectivamente (87).
θ(t + 1) = θ(t) + K(t + 1)[y(t + 1) − φT (t + 1)θ(t)]
(3.21)
Onde:
• θ(t + 1) - Estimador de Minimos Quadrados Recursivos;
• φT - Vetor de Medidas;
• θ(t) - Vetor de Parâmetros ;
K(t + 1) =
Onde:
P (t)φ(t + 1)
1 + φ(t + 1)P (t)φ(t + 1)
(3.22)
86
• K(t + 1) - Ganho do Estimador;
P (t + 1) = P (t) −
P (t)φ(t + 1)φT (t + 1)P (t)
1 + φ(t + 1)P (t)φ(t + 1)
Onde:
• P (t + 1) - Matriz de Covariância;
(3.23)
Capítulo 4
Planta de Produção de Biogás e
Eletricidade
No presente capítulo são apresentados os equipamentos utilizados, as etapas de instalação do biodigestor, desenvolvimento das telas do sistema de
supervisão e automação realizados na planta de produção de biogás do Laboratório de Energias Alternativas - LEA da Universidade Federal do Ceará
- UFC.
4.1 Planta de Biogás
A integração dos centros de Tecnologia e de Ciências Agrárias parte de
duas premissas: energia e agricultura sustentável. Para o Centro de Tecnologia, o esterco gerado pelos animais apresenta-se como uma solução, sendo
a matéria-prima para a geração de energia através do biogás. Porém, após a
utlilização desses dejetos no biodigestor tem-se o biofertilizante, que é uma
solução para a área de agronômia, onde é utilizado como adubo orgânico nas
plantações.
A Figura 4.1 mostra a integração e os produtos gerados entre os centros
de pesquisa, assim como se apresentam os problemas e as soluções referentes
à esses produtos.
88
Figura 4.1: Integração e produtos dos centros de pesquisa.
Dentre os Departamentos do Centro de Ciências Agrárias, o que possuem
produtos comuns para a integração com o Centro de Tecnologia são: Engenharia Agrícola, Zootecnia e Fototecnia, pois analisando as matérias-primas
utilizadas nos processos dos centros, constata-se que o refugo ou subproduto
gerado em cada área corresponde a necessidade do outro.
Na Figura 4.1, observa-se que os produtos dos departamentos de Engenharia Agrícola, Zootecnia e Fitotecnia são hortigranjeiros, frutas, carnes,
leite e couro, mas que no processo de produção desses produtos é gerado os
excrementos e refugos, tais materiais quando não utilizados podem propor-
89
cionar doenças e odores desagradáveis. Porém, para o Centro de Tecnologia
(Engenharia Elétrica) esses excrementos e refugos podem se apresentar como
uma solução sendo utilizado como matéria-prima para os biodigestores.
Através do biodigestor é produzido o biogás para gerar calor e eletricidade
além do bioferilizante que poderá ser utilizado como adubo orgânico novamente no Centro de Ciências Agrárias. Dessa forma, o ciclo de integração é
reiniciado.
A planta de biogás do LEA é composta por um biodigestor do tipo tubular, válvulas de fechamento com acionamento manual (gaveta e esfera),
conjunto motor/gerador, sistema de controle com CLP e módulos de expansão (analógicos e digitais), sistema de monitoramento com computador
e programa de supervisão (Elipse SCADA) e sistema de controle de vazão
composto por válvula de controle proporcional de vazão, sensores de vazão,
pressão e temperatura.
A Figura 4.2 mostra a unidade de controle de vazão da planta de biogás
do LEA.
Figura 4.2: Unidade de controle de vazão da planta de biogás.
90
4.2 Conjunto Motor/Gerador
O conjunto motor/gerador usado na presente pesquisa é fabricado no
Brasil pela Cia. Branco Motores, modelo B4T-5000 Bio (Figura 4.3). De ciclo
Otto ou de ignição por centelha, tem o funcionamento baseado em quatro
tempos. Nos motores quatro tempos, cada fase do ciclo é realizada em um
curso do pistão, sendo que para realizar os quatro ciclos são necessárias duas
voltas do virabrequim (720o ).
Figura 4.3: Motor/Gerador modelo B4T-5000
Para que todo motor a combustão funcione, é necessário ter proporções
de mistura correta entre o combustível e o ar atmosférico, caso contrário o
excesso de combustível diculta a propagação da chama, provocando uma
instabilidade na rotação do motor, além de provocar o resfriamento da câmara de combustão e em consequência disso a extinção da chama, impedindo
o motor de funcionar (motor afogado). Com excesso de ar, a chama se
torna excessivamente lenta, mantendo a combustão durante grande parte da
expansão, provocando o superaquecimento da câmara de combustão. Esta
condição pode provocar a fusão da cabeça do pistão.
Na Tabela 4.1 são dadas as características do conjunto motor/gerador
modelo B4T-5000 Bio (90).
91
Tabela 4.1: Características do conjunto motor/gerador B4T-5000 Bio (90).
Unidade de Força
Motor
Potência Máxima
Potência Nominal
Tensão de Saída
Corrente de Carga
Sistema de Partida
Consumo
Número de Pólos
Rotação do Eixo
Frequência
Cilindradas
monocilíndrico, 4 Tempos
11 CV
4 KVA
3,6 KVA
110 V/220 V (bivolt)
8,3 A
partida manual e partida elétrica
2m3 /h
2
3600 RPM
60 Hz
389 cc
4.3 Controlador Lógico Programável
O Controlador Lógico Programável (CLP) utilizado no controle da planta
de biogás foi o modelo Twido TWDLC-E40DRF com 24 entradas (24 VDC)
e 14 saídas à relé (2A) e 02 saídas à transistor (1A) e expansões modelos TM2AMI4LT com 04 entradas analógicas de 12 bits (0-10V, 0-20mA,
PT100, PT1000, NI100 e NI1000) e TM2AMM6HT com 04 entradas e 02
saídas analógicas de 12 bits (0-10V e 4-20mA) (Figura 4.4). O programa
utilizado para a programação do CLP foi o TwidoSuite versão 2.20.10, que
possui ambiente de desenvolvimento gráco com recursos para criar programas com diferentes tipos de linguagem e de conguração da CPU e módulos
de expansão.
4.4 Atuador
Para realizar o controle de vazão de biogás, foi utilizada a válvula de
controle proporcional modelo TR24-SR-T US da Belimo (Figura 4.5). Na
Tabela 4.2 são descritas as especicações técnicas da válvula proporcional de
controle de vazão.
92
Figura 4.4: Controlador lógico programável e expansões.
Figura 4.5: Válvula proporcional de controle de vazão.
Tabela 4.2: Características da válvula Modelo TR24-SR-T US
Controle
Proporcional
Tensão Nominal
24 VAC 50/60 Hz, 24 VDC
Potência
0,5 W
Impedância de Entrada
100 kΩ
Ângulo de Rotação
90 graus
Sentido de Rotação
Reversível com Interruptor
Acionamento
Comando Manual e Automático
Tempo de Execução
90 segundos
Conexão
1/2"
93
4.5 Sensores
O monitoramento da planta de biogás é realizado por sensores de temperatura, pressão e vazão.
4.5.1 Sensor de Temperatura
Foi utilizado para medir a temperatura do biogás na admissão do motor
o sensor modelo TN2531 da ifm
electronic. O sensor de temperatura TN2531
é exibido na Figura 4.6 e na Tabela 4.3 são descritas as caracteristicas do
sensor.
Figura 4.6: Sensor de temperatura TN2531
Tabela 4.3: Características do sensor de temperatura TN2531
Tensão de operação
Saída
Range
Resistência à pressão
Tipo de proteção, classe de proteção
18-32 VDC
4-20 mA / 0-10 V
-40o C a +100o C
300 bar
IP 67, III
94
4.5.2 Sensores de Pressão
O monitoramento da pressão da planta de biogás é realizado por dois
sensores modelo PG2457 da
ifm electronic. Os sensores estão posicionados
na montante e jusante da válvula de controle proporcional. Essa conguração
permite medir a pressão estática quando a válvula proporcional se encontra
fechada e a pressão diferencial quando aberta ou parcialmente aberta. Na
Figura 4.7 é visto o sensor de pressão PG2457.
Figura 4.7: Sensor de pressão PG2457
Na Tabela 4.4 são descritas as caracteristicas do sensor de pressão PG2457.
Tabela 4.4: Características do sensor de pressão PG2457
Tensão de operação
Saída
Faixa
Resistência à pressão
Tipo de proteção, classe de proteção
Resolução
18-32 VDC
4-20 mA
-0,05 a 1 bar
10 bar
IP 67 / IP 69K, III
0,002 bar
95
4.5.3 Sensores de Vazão
O sensor utilizado para medição de vazão e consumo de biogás é o modelo
SD 5000 da
ifm electronic. A vazão é monitorada por um sistema de medi-
ção calorimétrica. O princípio de medição do medidor de vazão calorimétrico
é baseado na dispersão térmica, onde um primeiro sensor de temperatura
é aquecido internamente em alguns graus Celsius acima da temperatura do
uido a ser medido. Quando este uido escoa pela tubulação onde o sensor
calorimétrico está instalado, o calor gerado nesse sensor através do seu circuito interno, é disperso através da velocidade do uido. Assim, quanto maior
for essa dispersão térmica entende-se que maior é a vazão, visto que o sensor aquecido tende a reduzir sua temperatura conforme o aumento da vazão.
Um segundo sensor de temperatura, não aquecido, é utilizado para medir a
temperatura do uido, possibilitando assim uma referência de comparação e
compensação ao circuito de medição do conjunto medidor.
O sensor SD 5000 (Figura 4.8) foi utilizado por não possuir partes móveis,
por isso não está sujeito a falhas devidas à corrosão de eixos, rolamentos e
desgastes mecânicos em geral.
Figura 4.8: Sensor de vazão SD 5000
96
Na Tabela 4.5 são descritas as caracteristicas do sensor de vazão SD5000.
Tabela 4.5: Características do sensor de vazão SD5000
Tensão de operação
19-30 VDC
Saída
contato NO/NC (impulso) ou 4-20 mA escalável
Range
0,06 a 15,00 N m3 /h; 0,83 (0,8) a 250,0 Nl/min
Resistência à pressão
16 bar
Tipo de proteção, classe de proteção
IP 65, III
4.6 Biodigestor
4.6.1 Etapas de Instalação do Biodigestor
O biodigestor utilizado na presente pesquisa é o modelo 4500, que foi
doado à UFC pela Recolast Ambiental, empresa de engenharia de impermeabilização atuando no mercado de revestimentos do Brasil e América Latina.
O modelo 4500 é um equipamento de construção simplicada. Porém,
complexo na sua hidrodinâmica e interrelações físico-químicas. As bactérias
transforma a matéria orgânica crua em biofertilizante de alta qualidade biológica, que atua como fertilizante foliar, redicular e como bioinseticida, tendo
como resíduo gasoso o biogás.
A escavação da trincheira para o biodigestor foi executada, seguindo as
recomendações do fabricante, paralela ao Laboratório de Energias Alternativas da UFC, conforme a Figura 4.9, para facilitar futuras ampliações. As
dimensões do Biodigestor Modelo 4500 podem ser vistas na Figura 4.10
Para (41), o biodigestor deve ser instalado em localização estratégica,
próximo às instalações (curral, aprisco, pocilga) para facilitar o transporte
do esterco, ao local de aplicação do biofertilizante e da utilização do biogás.
Considerando a impossibilidade de atingir o ideal, é mais fácil transportar o
esterco para o biodigestor do que o biofertilizante para área agrícola, devido
ao aumento substancial do volume.
97
Figura 4.9: Localização do biodigestor no LEA - UFC
Figura 4.10: Dimensões do biodigestor modelo 4500 (em metros).
Alguns parâmetros devem ser considerados na localização de um biodigestor:
• Condições locais do solo;
• Facilidade na obtenção, preparo e armazenamento da biomassa;
• Facilidade na remoção e utilização do biofertilizante;
• Distância de utilização do biogás.
Segundo a Recolast Ambiental, os lados e o fundo da trincheira devem
estar lisos sem pedras, sucatas ou raizes das árvores, pois as raízes podem
98
danicar a membrana plástica. As Figuras 4.11 e 4.12 mostram as sucatas
encontradas e a trincheira escavada ao lado do LEA.
Figura 4.11: Sucatas encontradas na escavação
Figura 4.12: Trincheira para
instalação do biodigestor
Devido ao grande número de entulhos e sucatas encontradas na escavação
da trincheira, algumas medidas da escavação ultrapassaram os valores recomendados pelo fabricante. Para corrigir as irregularidades, foram utilizadas
placas pré-moldadas de cimento com 50 x 50 cm (Figura 4.13) para modelar
a trincheira.
Em seguida, foi instalada a manta geotextil, conforme a Figura 4.14,
que possui as funções de drenagem de água de chuva, ltragem de pequenos
vazamentos que possam ocorrer, proteção e reforço das bordas da trincheira.
Após essas etapas (escavação, modelagem da trincheira, instalação da
manta geotextil), foi realizado o teste do biodigestor. Para vericar possíveis
vazamentos, o biodigestor foi inado com ar comprimido, como visto na
Figura 4.15.
De acordo com a Recolast Ambiental, a fermentação ocorre mais inten-
99
Figura 4.13: Trincheira modelada com as placas pré-moldadas de cimento
Figura 4.14: Instalação da manta geotextil.
samente quando a temperatura do material estiver entre 30o e 35o C, onde
nestas condições, a produção de biogás, por quilograma de material utilizado,
é maior e ocorre em menor tempo. Por essa razão, o biodigestor é instalado
semi enterrado, conforme a Figura 4.16, pois abaixo da superfície do solo as
temperaturas são mais elevadas e as suas variações são menores. Além disso,
o manejo dos biodigestores semi enterrados é mais fácil de ser executado.
Segundo (41), a caixa de entrada pode ser um tonel plástico ou tanque
de alvenaria, dependendo do volume da carga diária. Não é recomendada a
100
Figura 4.15: Teste de vazamentos do biodigestor
Figura 4.16: Biodigestor semi enterrado
utilização de tonéis de metal, pois enferrujam rapidamente. A caixa de saída
deve ser dimensionada três vezes o volume da carga diária para permitir
armazenamento do biofertilizante. A caixa de entrada da planta de biogás
do LEA foi feita com alvenaria com as dimensões 1 m x 1 m x 1 m, conforme
a Figura 4.17.
Assim como a caixa de entrada, a caixa de saída foi feita com alvenaria
nas dimensões 1,5 m x 1,5 m x 1 m, como pode ser visto na Figura 4.18.
Junto ao biogás existe vapor d'água, que por condensação se deposita nos
101
Figura 4.17: Caixa de entrada do
biodigestor.
Figura 4.18: Caixa de saída do biodigestor.
pontos mais baixos e com o tempo, impede a passagem do biogás. Desta
forma, a tubulação que conduz o biogás deve ter pontos mais baixos com
drenos, que funcionam como válvula de segurança. O dreno pode ser feito
com uma conexão T da qual sai um tubo ou mangueira que deve ser mergulhado em água dentro de uma garrafa ou caixa de concreto, chamado de
borbulhador, que está sob a ação da pressão atmosférica. Quando o biogás
borbulhar dentro do dreno, indica que o gasômetro está cheio (pressão maior
que a atmosférica), então o biogás deve ser utilizado para aliviar a pressão no
biodigestor. O biogás não deve ser liberado diretamente ao ambiente sem a
combustão (queimador) (exceto na primeira operação, quando o biogás está
misturado com o ar atmosférico), para evitar a emissão de gases de efeito
estufa (GEE). As Figuras 4.19 e 4.20, mostram o borbulhador e o queimador
da planta de produção de biogás do LEA, respectivamente.
4.6.2 Carga do Biodigestor
Foi utilizado para abastecer a caixa de entrada do biodigestor esterco de
caprino e água na proporção de 1:4 (Figura 4.21) de acordo com o sugerido
por (41), conforme a Tabela 4.6 para realizar a carga do biodigestor do LEA
e um tempo de retenção hidráulica de 30 a 40 dias.
O esterco foi cedido pela empresa Capril
Said, localizada no município de
102
Figura 4.19:
Borbulhador da
planta de biogás do LEA.
Figura 4.20: Queimador da planta
de biogás do LEA.
Figura 4.21: Abastecimento da caixa de entrada
Tabela 4.6: Cálculo do volume de carga (49).
Espécie Animal
Caprino/Ovino
Bovino
Suíno
Esterco por Animal (kg)
0,5
7
4
Relação Esterco/Água
1:4
1:1
1:1,3
Eusébio/CE, e transportado em tonéis (Figura 4.22). Os animais, conforme
a Figura 4.23, são mantidos connados e produzem aproximadamente 1 kg
103
de esterco por dia. Os animais são das raças Saanen, Alpina Francesa e
Anglo-Nubiana.
Devido à disponibilidade/compatibilidade de horário do criador dos caprinos, aliada à diculdade de transporte, distância e mão-de-obra para transportar o esterco, foram colocadas bateladas de 1200 litros para preencher a
carga do biodigestor.
Figura 4.22: Transporte do esterco.
Figura 4.23: Animais connados da Capril Said.
O biogás é um gás e quando misturado com o ar, como todos os combustíveis gasosos, torna-se explosivo. Seguindo a recomendação do fabricante do
biodigestor, foi realizado o descarte da primeira produção de biogás.
104
Para a segunda carga, foi inserido no biodigestor 1400 kg de substrato e
após 20 dias de retenção hidráulica foi produzido o biogás necessário para os
ensaios (Figura 4.24).
Figura 4.24: Biodigestor com biogás.
4.7 Controle e Monitoramento da Planta de
Biogás
Para realizar o controle, monitoramento e aquisição de dados da planta
de produção de biogás foram desenvolvidas telas de interface do usuário com
o processo.
Foi utilizado o
software Elipse SCADA, devido a grande versatilidade,
recursos grácos e rotinas que permitem agilizar a tarefa de desenvolvimento
da aplicação. A versão "Elipse Pro"foi escolhida para realizar o monitoramento da planta, pois permite que o uxo de dados possa ser feito em tempo
real com a planta de biogás.
Além das aplicações inseridas no monitoramento da planta de biogás (monitoração de variáveis em tempo real, grácos e objetos que estão relacionados
105
com as variáveis físicas de campo), foram criados bancos de dados para armazenar os dados das variáveis de frequência, pressão e vazão. Na Figura
4.25 é mostrado o sistema de monitoramento da planta de biogás que possui
as principais telas:
Figura 4.25: Sistema de monitoramento da planta de biogás.
• Tela 01 - Tela de Abertura/Identicação do Usuário;
A tela de abertura/identicação (Figura 4.26) tem a função de permitir,
somente aos pesquisadores do LEA, o acesso à aplicação de supervisão da
planta (usuário). Cada usuário possui um nível de acesso. O usuário com
nível 1 é considerado superusuário. Este quando logado pode criar, modicar
e remover os atributos de todos os usuários. Para que não ocorram interrupções indesejadas da aplicação, foi inserido uma senha (código de saída) para
sair do modo
on-line.
• Tela 02 - Tela de Menu;
A tela de menu (Figura 4.27) permite o usuário acessar as telas de interface com o operador, monitorar as variáveis (em tempo real) do conjunto
motor/gerador, variáveis do controle de vazão, pressão e temperatura e coletar as variáveis em forma de relatório com intervalo de 15 minutos. Na
tela de menu é possível realizar o acionamento individual das cargas (quatro
lâmpadas halogenas de 500 W).
106
Figura 4.26: Tela de abertura/identicação do usuário.
Figura 4.27: Tela de menu.
• Tela 03 - Tela do Motor e Gerador;
A tela do motor e gerador (Figura 4.28) permite o usuário navegar para
outras telas, além de permitir o monitoramento das variáveis de frequência,
rotação do eixo, tensão e corrente de saída do gerador de eletricidade.
• Tela 04 - Tela de Relatório de Frequência;
A tela de relatório de frequência (Figura 4.29) permite o usuário acompanhar
a evolução da frequência do gerador, assim como gerar relatórios no intervalo
de 100 ms e apagá-los a qualquer momento.
107
Figura 4.28: Tela do motor e gerador.
Figura 4.29: Tela de relatório de frequência.
• Tela 05 - Tela de Pressão/Vazão;
A tela pressão/vazão (Figura 4.30) permite o usuário acessar outras telas do sistema de monitoramento da planta de biogás, além de permitir o
monitoramento das variáveis de pressão montante e jusante (mbar), vazão
de biogás (m3 /h), monitoramento e controle do percentual de abertura da
válvula de controle de vazão.
• Tela 06 - Tela de vazão de biogás;
A tela de vazão de gás (Figura 4.31) permite o usuário acessar outras
108
Figura 4.30: Tela de pressão/vazão.
telas, além de permitir o monitoramento instantâneo das variáveis de vazão
de biogás (m3 /h), monitoramento do consumo total de biogás (m3 ), controle
do percentual de abertura da válvula de controle de vazão, acompanhamento
da evolução da vazão de biogás e abertura da válvula proporcional, assim
como gerar relatórios com intervalo de 1 milisegundos e apagá-los a qualquer
momento.
Figura 4.31: Tela de vazão de gás.
• Tela 07 - Tela de acionamento de cargas;
A tela de acionamento de cargas (Figura 4.32) permite o usuário selecionar
109
e acionar a potência desejada através de lâmpadas halogenas, sendo possível
selecionar as cargas de 500 W, 1000 W, 1500 W e 2000 W.
Figura 4.32: Tela de acionamento de cargas.
4.8 Dinâmica do Sistema de Controle
O presente estudo foi realizado comparando-se a resposta do sistema
quando aplicado uma perturbação no processo. No primeiro momento, são
realizados ensaios utilizando o controlador centrífugo (pertecente ao conjunto
motor/gerador) e posteriormente realizando a manipulação da vazão do gás
utilizando o algoritimo PID a m de obter o controle de rotação, frequência
e tensão.
Para determinar o comportamento (frequência x potência) do conjunto
motor/gerador quando aplicada a carga, foi instalado um dispositivo de
contagem de pulsos composto por um sensor indutivo e um disco com seis
furos equidistantes, como apresentado na Figura 4.33. O disco perfurado foi
acoplado ao eixo do gerador através de um prolongamento, permitindo assim, contar os pulsos por rotação do eixo. O dispositivo tem o funcionamento
semelhante ao
encoder de deslocamento angular.
Para se ter uma leitura de pulsos mais precisa, o disco perfurado foi
usinado em um centro de usinagem (Discovery 1000) com comandos numé-
110
Figura 4.33: Instalação do sensor indutivo.
ricos computadorizados (CNC). A usinagem foi realizada no Laboratório de
Máquinas Operatrizes (LMO) do Instituto Federal de Educação, Ciência e
Tecnologia do Ceará (IFCE).
Capítulo 5
Ensaios e Resultados
No presente capítulo são apresentados os resultados e os ensaios realizados
na planta de produção de biogás do Laboratório de Energias Alternativas LEA da Universidade Federal do Ceará - UFC.
5.1 Ensaios
5.1.1 Analise do Biogás do LEA
A analise do biogás foi realizada pela Petrobrás (Lubnor) com o detector
CP3800. O resultado da análise do biogás produzido no LEA comparado
ao citado em (41) apresentou valores ideais de composição com 59% de CH4
(principal componente). As Figura 5.1 e 5.2 apresentam as características do
biogás produzido nas pesquisas.
5.1.2 Dinâmica das Variáveis do Processo
O presente estudo foi realizado utilizando dois diferentes combustíveis: o
primeiro ensaio utilizando apenas gasolina e o segundo utilizando a gasolina
para a partida do motor e posteriormente efetuando a mudança para o biogás.
Para determinar as curvas de resposta do sistema do conjunto, foi inserida
112
Figura 5.1: Composição do biogás - LEA.
Figura 5.2: Composição do biogás, conforme (41).
uma perturbação de aproximadamente 60% da potência nominal do gerador.
Os dados de vazão, pressão, temperatura e frequência foram coletados (antes
e após a perturbação) através de sensores e enviados para memória do CLP,
transmitido para o sistema supervisório através do protocolo
Modbus e pos-
teriormente armazenados no banco de dados (histórico/relatório) criado no
computador de monitoramento da planta.
Nas Figuras 5.3, 5.4 e 5.5 é demonstrado o comportamento das variaveis
de pressão, vazão, frequência e temperatura quando utilizado o biogás para
o funcionamento do conjunto motor/gerador.
Na Figura 5.3 se observa que ao aumentar a abertura da válvula proporcional (aumento da vazão) o sistema reduz a pressão de 30 mbar para pressão
-20 mbar (vácuo), ocasionada pela sucção de combustível do conjunto motor/gerador.
Na Figura 5.4 é mostrado um comportamento semelhante à curva de
113
eee
Figura 5.3: Curva de resposta pressão e vazão.
Figura 5.4: Curva de resposta frequência e pressão.
Figura 5.5: Curva de resposta temperatura e vazão.
114
resposta da vazão e pressão (queda de pressão). No intervalo de 80 segundos
após o fechamento da torneira da gasolina ocorre a redução sistemática da
frequência de rotação do motor. Dessa forma, o controlador PI inicia da
abertura da válvula proporcional para corrigir o distúrbio liberando gás para
o sistema e consequentemente reduzindo a pressão do sistema.
O comportamento da Figura 5.5 é provocado pela troca de calor entre
o gás armazenado no biodigestor e a tubulação do sistema de controle de
vazão localizado no interior do LEA. Observa-se que a temperatura máxima
do gás proveniente do biodigestor encontra-se adequada para a fermentação
do substrato (30o e 35o C).
Na medição do consumo de biogás da planta experimental do LEA foi
utilizado o sensor de vazão SD5000. O sensor foi congurado para realizar
a medição de consumo por pulsos. Na Figura 5.6 é observado a curva de
consumo de biogás (m3 ) do conjunto motor/gerador no intervalo de 21,6 a
22,8 m3 . O consumo é acumulativo, porém é possível zerar o registro do
contador no sistema de monitoramento da planta de biogás para realizar
novas medições de consumo.
Figura 5.6: Curva de consumo (m3 ) do motor/gerador .
Observa-se que, no gráco da Figura 5.6 o conjunto motor/gerador em
20 minutos de funcionamento consome aproximadamente 1 m3 de biogás.
115
5.1.3 Dinâmica de Partida do Conjunto Motor/Gerador
Foram utilizados o Programa
Matlab-Simulink r e os dados coletados no
sistema de aquisição para identicar a dinâmica de partida do conjunto motor/gerador. Na Figura 5.7 apresenta a curva de resposta do sistema ao ser
dada a partida a frio do conjunto motor/gerador sem aplicação de carga.
Figura 5.7: Curva de frequência sem a aplicação da carga
Percebe-se que a partida do conjunto motor/gerador tem um comportamento de sistema amortecido sem erro permanente. Embora essa partida
não se congure em um ensaio com carga, é um parâmetro de resposta da
ação do controlador centrífugo, onde se observa que o mesmo estabiliza a
frequência do motor próximo a 60 Hz em 13,2 segundos.
Na Tabela 5.1 é mostrada o comportamento da partida do conjunto motor/gerador sem cargas. A partida a frio do conjunto motor/gerador sem
carga apresentou amplitude máxima de 13 Hz.
5.1.4 Controlador Centrífugo com Gasolina
Inicialmente, o conjunto motor/gerador é acionado através da partida elé-
116
Tabela 5.1: Sistema sem Aplicação das Cargas na Partida com Gasolina.
Intervalo de Tempo (s)
4,8-5,6
5,6-13,2
13,2 em diante
Condição de Funcionamento
Partida do Motor
Oscilação no Sistema
Estabilidade do Sistema
trica. Após 10 minutos trabalhando em regime permanente para aquecer o
motor e estabilizar a frequência da planta, foi inserida uma carga de 2000
W (quatro lâmpadas halogenas de 500 W). Através do CLP e sistema supervisório, foram armazenadas no banco de dados as informações de resposta
do sistema. A curva de resposta do sistema é apresentada na Figura 5.8.
Figura 5.8: Curva de frequência do controlador centrífugo com gasolina
No ensaio foi observado que, no momento do acionamento da carga, o
controlador centrífugo reage ao erro na frequência e faz o motor oscilar a
rotação resultando em uma amplitude máxima de frequência de 17 Hz. A
estabilização do sistema com a presença das cargas apresenta uma variação
de frequência de 4 Hz e erro de amplitude permanente e 8 Hz amplitude
máxima de saída da Carga.
Na Tabela 5.2 é detalhada o comportamento da partida do conjunto motor/gerador com as cargas em função do tempo.
117
Tabela 5.2: Sistema com Aplicação das Cargas com Gasolina.
Intervalo de Tempo (s)
0-22,5
22,5
28,75-60
60
62,5 em diante
Condição de Funcionamento
Sistema Estabilizado
Perturbação - Entrada das Cargas (2000 W)
Estabilidade do Sistema com Carga
Saída da Carga (2000 W)
Estabilidade do Sistema sem Carga
5.1.5 Controlador Centrífugo com Biogás
Os procedimentos adotados para realizar o ensaio de carga foram similares
ao do controlador centrífugo com gasolina com carga. Porém, ao realizar o degrau de carga, foi necessário realizar a abertura total da válvula proporcional
(100%) e o ajuste manual da válvula da câmara de expansão do gás a m de
obter a quantidade suciente de combustível (biogás) para o funcionamento
correto do motor.
A resposta para o ajuste manual da vazão com o sistema controlador
centrífugo com biogás é demonstrada na Figura 5.9.
Figura 5.9: Curva da frequência com ajuste manual do biogás.
Vericou-se que, após fechar a válvula de gasolina e abrir bruscamente
118
a válvula de biogás, ocorreu o "afogamento"do motor, sendo necessário iniciar novamente o procedimento de partida e abertura lenta da válvula de
expansão.
Ao interromper o fornecimento de gasolina e iniciar a adição lenta de
biogás o motor perde aceleração, sendo portanto, necessário a intervenção
com uma maior abertura na válvula de expansão, provocando a amplitude
máxima de oscilação de 37 Hz. No intervalo de 48 a 73 segundos é observado
a recuperação da rotação do motor e após os 73 segundos o sistema estabiliza.
Tabela 5.3: Sistema controlador centrífugo com biogás com ajuste manual.
Intervalo de Tempo (s)
0-5
5
5-73
73 em diante
Condição de Funcionamento
Sistema Estabilizado
Transição para Gasolina
Ajuste Manual
Estabilidade do Sistema
Após a estabilização do sistema através do ajuste manual foram inseridas
as cargas. Na Figura 5.10 é mostrada a resposta do sistema.
É possível observar que o controlador efetua a ação de correção da perturbação em 12,2 segundos. Diferentemente do ensaio com alimentação por
gasolina, a resposta do ensaio utilizando biogás provocou uma menor oscilação do sistema e amplitude máxima de 6 Hz na entrada da carga, 2,5 Hz
de amplitude máxima de saída da carga, porém com estabilização da planta
com erro permanente de 5 Hz.
A Tabela 5.4 mostra o detalhamento do gráco do controlador centrífugo
com biogás com aplicação de cargas.
Tabela 5.4: Sistema com Aplicação das Cargas com biogás.
Intervalo de Tempo (s)
0-28,75
28,75
41-81
81
91 em diante
Condição de Funcionamento
Sistema Estabilizado com biogás
Perturbação - Entrada das Cargas (2000 W)
Estabilização do Sistema com Cargas (2000 W)
Saída das Cargas (2000 W)
Estabilização do Sistema
119
Figura 5.10: Curva de frequência do controlador centrífugo com biogás.
5.1.6 Controlador Centrífugo e PI com Biogás
5.1.6.1 Denição dos parâmetros PI
O modelo matemático do processo dinâmico foi estabelecido a partir de
dados experimentais observados em laboratório, onde foi aplicado um degrau
na variável manipulada (frequência do conjunto motor/gerador) e após essa
ação foi analisada a resposta do sistema, observando a variável controlada
(vazão do biogás). Os parâmetros do controlador PI foram estabelecidos
através da identicação do sistema em malha aberta utilizando os estimadores de minimos quadrados (MQ) e minimos quadrados recursivos (MQR).
Na Figura 5.11 pode ser observada a curva de resposta da vazão quando
modicada a frequência de rotação do conjunto motor/gerador através de
variações de carga.
Através do estimador de minimos quadrados (MQ) foram obtidos os parâmetros: a0 =1,2673; a1 =0,2808; b0 =0,0074 e b1 =-0,0073. A Figura 5.12
mostra a curva de vazão real e estimada quando aplicado o estimador MQR.
Os procedimentos do ensaio utilizando o algoritimo PI com biogás segui-
120
Figura 5.11: Curva de resposta frequência e vazão.
Figura 5.12: Curva da vazão real e vazão estimada pelo MQR.
ram os mesmos critérios de valores das cargas, porém o ajuste de abertura
da válvula de expansão foi substituido pelo acionamento da válvula proporcional. Os parâmetros estabelecidos do controlador PI foram obtidos através
do auxilio do Matlab-Simulink r (Figura 5.13), sendo considerados sucientes
121
para os ensaios iniciais os valores (Kp=10,009 e Ki=0,186) estabelecidos pelo
sintonizador (tuning
tool ) do bloco PID(z).
Figura 5.13: PID paralelo
Matlab-Simulink r .
A simulação da resposta ao degrau utilizando o controlador PID, em
ambiente computacional (Matlab-Simulink r ), utilizando os parâmetros Kp
= 10,009; Ki = 0,186 e Kd = -5,513, demonstra que o sistema é estável e com
tempo de estabilização do sistema em 18 segundos. A resposta ao degrau é
apresentada na Figura 5.14.
Figura 5.14: Resposta do PID paralelo ao degrau.
Para realizar os ensaios foi utilizado apenas a conguração PI, pois o
bloco PID do Controlador Lógico Programável utilizado não permite inserir
valor negativo no parâmetro D (D = 0). Na Figura 5.15 pode ser observada
a parametrização do bloco PID do CLP.
122
Figura 5.15: Parametrização do bloco PID paralelo.
Na Figura 5.16 pode ser observada a resposta do sistema quando utilizado
o controlador centrífugo e a válvula proporcional controlada pelo algoritimo
PI. A Tabela 5.5 mostra o comportamento do controlador centrífugo com
biogás com aplicação de cargas.
Figura 5.16: Curva de frequência dos controladores simultâneos com biogás.
Ao partir o motor, um sinal de frequência é enviado ao controlador PI, que
atua juntamente com o controlador centrífugo no motor. Com o fechamento
123
da torneira de gasolina, o motor temporariamente trabalha com a mistura dos
dois combustíveis (gasolina + biogás). A mistura de combustíveis juntamente
com a ação dos controladores provocam a oscilação no sistema sem cargas,
que é observado no intervalo de 8 a 16 segundos. A entrada da carga provocou
uma amplitude máxima de oscilação da frequência de 16 Hz, erro permanente
de 5 Hz e a saída da carga apresentou uma oscilação com amplitude máxima
de 7 Hz.
Tabela 5.5: Aplicação das Cargas com Controladores Simultâneos.
Intervalo de Tempo (s)
0-8
8
16-28
28
38
70
79 em diante
Condição de Funcionamento
Sistema estabilizado (gasolina)
Mudança de gasolina para biogás
Estabilização do Sistema sem Cargas
Pertubação - Entrada das Cargas (2000 W)
Estabilização do Sistema com Cargas
Saída da Carga (2000 W)
Estabilização do Sistema sem Carga
5.1.7 Controlador PI com Biogás
Para realizar o ensaio somente com controlador PI faz-se necessário desacoplar o controlador centrifugo. O desacoplamento da haste com o motor em
funcionamento ocasiona a aceleração demasiada do motor além de desregular
o controlador centrífugo. Assim, para realizar o ensaio utilizando apenas o
controlador PI, a haste do controlador centrífugo foi desacoplada com o motor desligado e através do parafuso de regulagem de marcha lenta foi ajustada
a rotação mínima de funcionamento do conjunto motor/gerador. A partida
do motor foi realizada utilizando apenas o biogás. Na Figura 5.17 pode ser
observada a resposta do sistema quando utilizado apenas o controlador PI
para o controle da válvula proporcional.
No gráco é observado que, o motor, utilizando biogás, entra em funcionamento após 10 segundos. Após esse procedimento o motor acelera lentamente, dependendo apenas do controlador PI para corrigir os parâmetros de
aceleração. Devido a caracteristica de tempo de resposta da válvula utilizada
124
Figura 5.17: Curva de frequência do controlador PI com biogás.
na pesquisa (Tabela 4.2), a ação de correção se deu após 140 segundos da
partida.
Devida a característica de resposta lenta da válvula proporcional, não foi
possível comprovar a eciência do sistema proposto, pois conforme o ensaio,
após 158 segundos o motor entrou em regime de aceleração máxima, sendo
necessário desligá-lo após atingir a frequência superior a 70 Hz.
Capítulo 6
Conclusões
Esta dissertação descreveu o estudo de viabilidade do controle de vazão
de biogás com baixa pressão para produção descentralizada de eletricidade.
A análise da composição do biogás produzido no Laboratório de Energias Alternativas apresentou valores ideais para o perfeito funcionamento do
conjunto motor/gerador com 59% de CH4 , 31% de CO2 , N2 e 3% de O2 .
Os resultados de medição de vazão com o conjunto motor/gerador em
regime de funcionamento com carga, mostrou que o consumo de biogás para
o conjunto motor/gerador (4 KW) foi aproximadamente 3 m3 /h.
O resultado mostrou que o funcionamento do conjunto motor/gerador não
depende de pressão positiva no interior do biodigestor, pois foi vericado nos
ensaios que o conjunto motor/gerador, em funcionamento, produziu a pressão
negativa de -20 mbar (vácuo) que foi responsável pela sucção do biogás.
A temperatura do biogás observada na entrada do conjunto motor/gerador
de 34 o C demonstra que o interior do biodigestor possui condições favoráveis
para a fermentação do substrato.
Utilizando os parâmetros proporcional e integral sugeridos no método de
sintonia do
Matlab-Simulink r , o controlador PI juntamente com o controla-
dor centrífugo apresentou um desempenho satisfatório no ponto de vista do
tempo de estabilidade com a variação da carga comparados ao controlador
centrífugo existente atuando individualmente. Comparando os resultados ob-
126
tidos nos ensaios, observa-se que o sistema com controlador centrífugo com
gasolina apresentou melhor tempo resposta (6,2 s) para estabilidade após
a aplicação da carga, seguidos dos sistemas com controladores simultâneos
(centrífugo + PID) com biogás (10 s) e centrífugo com biogás (12,2 s).
Contudo um tempo de resposta menor signica uma amplitude de frequencia maior, sendo respectivamente registrada para os controladores centrífugo com gasolina, controladores simultâneos e centrífugo com biogás de
17 Hz, 16 Hz e 6 Hz. O que pode ser justicado pelo fato de quanto maior a
ação do controlador em corrigir o erro acarreta uma maior instabilidade no
sistema.
O mesmo é observado durante a saída da carga. Constata-se que o controlador centrífugo com gasolina apresenta um melhor desempenho na estabilização do sistema (2,5 s), seguido do sistema com controlador simultâneos (9
s) e controlador centrífugo com biogás (10 s).
Embora o consumo do conjunto motor/gerador funcionando com biogás é
adotado pelo fabricante em 2 m3 /h, nos resultados dos ensaios foi observado
que o conjunto motor/gerador consome 3 m3 /h de biogás. A diferença do
consumo é ocasionada por vazamentos que ocorrem na admissão do biogás
junto aos ltros de ar.
O sistema de controle e supervisão implementado na planta de geração
de biogás do Laboratório de Energias Alternativas permitiu avaliar o comportamento da estabilidade do conjunto motor/gerador sob variação brusca
da carga. A introdução de uma válvula de controle proporcional no controle de vazão de biogás permitiu a integração do controlar PI ao controlador
centrífugo existente no conjunto motor/gerador.
Embora estimados os parâmetros do controlador PID, o controle derivativo não foi utilizado nos ensaios por restrições à valores negativos do
controlador lógico programável, a conguração PID testada em ambiente
computacional, apresentou-se como sistema controlável e com tempo de 15
segundos para estabilidade após o degrau.
O ensaio utilizando os controladores simultâneos se mostrou ecaz na
partida do conjunto motor/gerador, reduzindo a intervenção humana no con-
127
trole de vazão de gás na alimentação do conjunto. O sistema proposto não
necessita de ajuste intermediários na válvula de expansão. Assim oferece possibilidade de inserir a partida automática no sistema, e ainda proporcionar o
acesso ao controle e monitoramento remoto da mesma.
A sistemática adotada na pesquisa permite que os dados obtidos possam
servir de ponto de partida para modelamentos computacionais e melhoria
dos parâmetros de controle (tempo de resposta para estabilidade, amplitude
máxima com carga) da planta de biogás do LEA.
A instalação do biodigestor contínuo deve ser o mais próximo possível do
local de coleta do material orgânico. Esse fator reduz os custos de transporte,
além de permitir a carga diária do biodigestor. O biodigestor utilizado no
LEA é do tipo tubular de ciclo contínuo. Devido à distância entre o biodigestor (LEA) e Capril Said (Eusébio), as cargas foram colocadas em batelada
(1200 litros). Essa forma de abastecimento permitiu apenas a produção de
biogás a cada dois meses para realização dos ensaios com carga máxima.
A falta de suporte e informações técnicas detalhadas nos manuais do fabricante do conjunto motor/gerador interferiram nos ajustes do equipamento.
As informações dos parâmetros de funcionamento e regulagem do controlador
centrífugo não constam nos manuais oferecidos, dessa forma as manutenções
foram realizadas seguindo as orientações enviadas por meio eletrônico e telefônico.
6.1 Trabalhos Futuros
Com o objetivo de aperfeiçoar o controle de vazão da planta de biogás do
LEA são sugeridas as seguintes propostas para trabalhos futuros:
- Realizar o modelamento matemático completo da planta de biogás,
assim como os melhores parâmetros para produção de biogás no interior
do biodigestor;
- Utilizar outras congurações de PID no controle de vazão da planta de
biogás;
128
- Utilizar outros métodos e algoritmos de controle como por exemplo:
fuzzy;
- Substituir o controlador centrífugo por outro atuador de aceleração
do motor para que o controlador possa ajustar vazão e aceleração do
motor;
- Complementar a supervisão em tempo-real da planta e inserir o monitoramento remoto com a utilização da internet;
- Utilizar a planta de biogás como parte de um sistema híbrido.
Apêndice A
Projetos e Artigos Publicados
• MOREIRA, A. P et al. Estimação, controle e simulação do sistema de
pressão e vazão de uma planta de biogás.
de Energia Solar.
III Congresso Brasileiro
Belém, 2010.
• MOREIRA, A. P et al. Avaliação e potencial eólico utilizando estimadores de mínimos quadrados baseados na distribuição de Weibull.
VIII Latin-american congress on electricity generation and
transmission . Ubatuba, 2009.
• MOREIRA, A. P et al. Biogás panorama e perspectivas de geração de
VI Congresso
de Pesquisa e Inovação da Rede Norte Nordeste de Educação
Tecnológica. Natal, 2011.
energia elétrica para a sustentabilidade no meio rural.
• Projeto de Financiamento para a Aquisição de Equipamentos do LEA UFC/BNB - Uso eciente de biogás produzido em biodigestores.
Fortaleza, 2010.
Referências Bibliográcas
1 ANTONIO, D. O-grid electricity for developing countries.
Review, v. 45, p. 2528, August 2002.
IEEE
2 CARNEIRO, R. Desenvolvimento em crise: a economia brasileira no
último quarto do século XX.
Unesp/Unicamp, São Paulo, 2002.
Impacto do racionamento nos resultados
das empresas concessionárias do serviço público de distribuição
de energia elétrica: um estudo nas empresas privadas da região
Nordeste. 2003. 199f. Dissertação (Mestrado em Ciências Contábeis) 3 RIDALVO, M. A. O.
Universidade Federal do Rio Grande do Norte, Natal.
4 FOCCACI, A. Empirical analysis of the environmental and energy
policies in some developing countries using widely employed macroeconomic
indicators: the cases of Brazil, China and India.
Energy Policy, v. 33,
n. 4, p. 543554, March 2005.
5 GHISI, E.; et al. Electricity end-uses in the residential sector of Brazil.
Energy Policy, v. 35, n. 12, p. 41014120, August 2007.
6 COHEN, C.; SCHAEFFER, M. L. e R. Energy requirements of
households in Brazil.
Energy Policy, v. 33, n. 4, p. 555562, 2005.
7 GOMES, A. C.; et al.
BNDES 50 anos - histórias setoriais: o
setor elétrico. Rio de Janeiro:
BNDES, 2002.
Reestruturação e descentralização do
setor elétrico brasileiro: o novo modelo institucional. Salvador:
8 BAIHIENSE, D. A.
Superintendência de Estudos Econômicos e Sociais da Bahia, 2005.
130
131
9 MME.
Programa Luz para Todos. Ministério de Minas e Energia,
Disponível em <http://www.luzparatodos.mme.gov.br>, Acesso em: Fev.
2011.
10 REIS, R. Os benefícios da privatização:evidência no setor elétrico
brasileiro.
Revista de Contabilidade e Organizações, v. 1, p. 5670,
Mar 2007.
Relatório: Participação das empresas de
geração na capacidade instalada. Ministério de Minas e Energia,
11 ELETROBRáS.
Disponível em: <http://www.eletrobras.gov.br>, Acesso em: Nov. 2010.
12 SINERGIA.
Crise energética no Brasil. Caderno do Sindicato dos
Energéticos de São Paulo, São Paulo, Novembro 2001.
Empresa de Pesquisa Energética - Plano Decenal de
Expansão de Energia 2019. Ministério de Minas e Energia, Brasilia,
13 MME.
2010.
14 ANEEL.
Relatório ANEEL 2009. Agência Nacional de Energia
Elétrica, 3. ed. Brasília, DF, 2010, 90 p.
15 ANEEL.
Balanço Energético Nacional. Atlas de Energia Elétrica
do Brasil, 3. ed. Brasília, DF, 2008, ISBN 978-85-87491-10-7.
16 CHESF.
Sistema de Geração. Companhia hidro Elétrica do São
Francisco, Disponível em: <http://www.chesf.gov.br>, Acesso em: Mar.
2010.
17 IEDI. Políticas
para promoção da econômia verde: a experiência
internacional e o Brasil. Instituto de Estudos Para o Desenvolvimento
Industrial, Rio de Janeiro, Novembro 2010.
A caminho da sustentabilidade energética:
como desenvolver um mercado de renováveis no Brasil. Greenpeace
18 GREENPEACE.
Brasil, 2008.
132
19 NOUNIA, M.; MULLICKB, S.; KANDPALB, T. Biomass gasier
projects for decentralized power supply in India: a nancial evaluation.
Energy Policy, v. 35, n. 2, p. 13731385, February 2007.
Estratégia Nacional para a Energia 2020 Miniprodução de electricidade. Governo de Portugal, Disponível em:
20 PORTUGAL, G. de.
<http://www.portugal.gov.pt>, Acesso em: Mai. 2011.
Aplicação de indicadores de desempenho
em avaliações estratégicas para estudos de viabilidade em
empreendimentos de geração descentralizada em sistemas
isolados. 2008. 109f. Dissertação (Mestrado em Ciências Contábeis)
21 SANTOS, L.
-
Universidade Federal de Itajubá - UNIFEI, Itajubá.
22 ONS.
Mapas do SIN.
Operador Nacional do Sistema Elétrico,
Disponível em: <http://www.ons.org.br>, Acesso em: Mai. 2011.
23 KEJUN, Q. A hybrid power system using wind and diesel generator:
Proceedings of the
20th International Conference and Exhibition on Elctricity
Distribution, p. 14, 2009.
a case study at Masirah Island in Oman.
24 ANEEL.
Matriz de energia Elétrica. Agência Nacional de Energia
Elétrica, 3. ed. Brasília, DF, 2011, ISBN 978-85-87491-10-7.
Análise da viabilidade de alternativas de
suprimento descentralizado de energia elétrica a comunidades
rurais de baixa renda com base em seu perl de demanda. Rio de
25 RODRIGUES, A.
Janeiro, 2006. 103f. Dissertação (Mestrado)- Universidade Federal do Rio de
Janeiro - UFRJ.
26 MYKEN, A. Adding gas from biomass to the gas grid: Final report.
European Commision, Nov. 2001.
Conservação de Energia - Eciência Energética
de Instalações e Equipamentos. 3. ed. [S.l.]: PROCEL, 2001. 596 p.
27 SANTOS, A. M.
133
28 SILVA, C.
Limpeza e Puricação de Biogás. 2009. 91f. Dissertação
(Mestrado em Engenharia)- Universidade Trás-os-Montes e Alto Douro,
Vila Real, Portugal.
Eletricação rural de baixo custo - norma técnica e
vontade política. 1998. 190f. Dissertação (Mestrado)- Escola Politécnica,
29 JUCA, A.
Universidade de São Paulo, São Paulo.
30 CARVALHO, P. C. M.; COELHO, L. G. J. Sistemas fotovoltaicos
para o programa "luz para todos": um estudo para o estado do Ceará.
Congresso Brasileiro de Energia Solar, Fortaleza, 2007.
I
Potencialidade de produção de energia através do
biogás integrada à melhoria ambiental em propriedades rurais
com criação intensiva de animais, na região do meio oeste
catarinense. 2003. 103f. Dissertação (Mestrado)- Universidade Regional de
31 ZAGO, S.
Blumenau,Santa Catarina.
32 KATRIANA, T. F.; et al. Custo de geração de energia elétrica em
comunidade isolada do amazonas: estudo preliminar do projeto NERAM.
Revista Brasileira de Energia, Sociedade Brasileira de Planejamento
Energético, Manaus, 2006.
Bioenergy and water: the implications of largescale bioenergy production for water use and supply. Department of
33 BERNDES, G.
Physical Resource Theory, Chalmers University of Technology and Goteborg
University, Goteborg, Sweden, 2002.
Cana-de-açucar processadas pelas usinas
brasileiras: safra 2008/2009 para a região NorteNordeste. União da Indústria de Cana-de-açúcar, Disponível
34 UNICA.
em:
<http://www.unica.com.br/dadosCotacao/estatistica>, Acesso em: Mai.
2011.
Efetivo de animais em estabelecimentos agropecuários
por espécie de efetivo. Instituto Brasileiro de Geograa e Estatística,
35 IBGE.
Disponível em: <http://www.sidra.ibge.gov.br>, Acesso em: Fev. 2009.
134
36 IBGE.
Lavoura Permanente 2009. Instituto Brasileiro de Geograa,
Disponível em: <http://www.ibge.gov.br/estadosat>, Acesso em: Mai.
2009.
37 SOUSA, S.
Energia a partir do lixo no Ceará.
Jornal Diário
do Nordeste (Matéria Publicada em 4 de Novembro), Disponível em:
<http://www.diariodonordeste.globo.com/materia.asp?codigo=687039>,
Acesso em: Fev. 2010.
38 NETO, E.; et al. Implementação e avaliação de um biodiogestor de
produção descontínua.
e-xacta, v. 3, n. 2, 2010.
39 ZANETTE, A. L.
Potencial de aproveitamento energético do
biogás no Brasil.
2009. 105f. Dissertação (Mestrado)- Universidade
Federal do Rio de Janeiro - UFRJ, Rio de Janeiro.
40 CAMPOS, M. C. M. M.; TEIXEIRA, H. C. G.
Controles Típicos
de Equipamentos e Processos Industriais. 3. ed. São Paulo:
Edgard
Blucher, 2006. 416 p. ISBN 9788521203988.
41 QUADROS, D. Biodigestor
na agricultura familiar do semiárido.
1. ed. Salvador: EDUNEB, 2009. 96 p. ISBN 978-85-7887-057-7.
42 SMIL, V.
General Energetics. 1. ed. New York:
John Wiley, 1985.
426 p.
43 NOGUEIRA, L. A. H.; LORA, E. E. S.
Dendroenergia:
Fundamentos e aplicações. 2. ed. Porto Alegre:
Interciência, 2003. 199 p.
Biodigestor: Alternativa para o Manejo de Lixo
em Áreas Ecoturísticas. 2003. 46f. Monograa (Especialização) 44 ROMA, P.
Universidade de Brasília - UNB, Brasília - DF.
Medidas mitigadoras para a redução de
emissões de gases de efeito estufa na geração termelétrica. 2. ed.
45 COELHO, A.; et al.
Brasília - DF: Dupligráca, 2000. 222 p.
135
46 PALHARES, J.; et al. Utilização de indicadores para avaliar a
receptividade de propriedades ao processo de biodigestão anaeróbia.
Boletim Técnico 3, Embrapa Suínos e Aves, Concórdia, 2006.
Biodigestor como opção de fonte energética
para comunidades rurais do semi-árido. 2009. 93f. Dissertação
47 CANAFISTULA, F.
(Mestrado em Engenharia Elétrica)- Universidade Federal do Ceará - UFC,
Fortaleza.
48 DEGANUTTI, R.; et al. Biodigestores rurais: Modelo indiano, chinês
4o Encontro de Energia no Meio Rural, Campinas. Anais
eletrônicos, Disponvel em: <http://www.proceedings.scielo.br>, Acesso
e batelada.
em: jul. 2011.
Fomento e Administração de Programas Nacionais
de Biogás. Instituto Interamericano de Cooperação para a Agricultura,
49 IICA.
Paraíba, Novembro 1981.
50 SPERLING, M.
Principios básicos do tratamento de esgotos.
Departamento de Engenharia Sanitária e Ambiental - Universidade Federal
de Minas Gerais, Belo Horizonte, Fevereiro 1996. 211 p.
Anaerobic digestion (biogas) systems:
principles of integrated use and their application in developing
countries. 2. ed. Florida: WISE, D.L. International biosystems, 1989. 340
51 GUNNERSON, C.; et al.
p.
52 EPA.
The AgStar Biogas Handbook. Environmental Protection
Agency, Disponível em: <http://www.epa.gov/agstar/library/handbook.htm>, Acesso em: Abr. 2011.
Eciência com custo reduzido: os benefícios da
fermentação anaeróbia. Jornal da Coopavel, Cascavel, 2002. 22 p.
53 KUCZMAN, O.
Geração e utilização de biogás
em unidades de produção de suínos. Programa Nacional do Meio
54 OLIVEIRA, P.; HIGARASHI, M.
Ambiente II - EMBRAPA, Concórdia - SC, Fevereiro 2006.
136
55 RECOLAST.
Biodigestor.
Recolast Ambiental, Disponível em:
<http://www.recolast.com.br/meio-ambiente/biodigestor.php>, Acesso em:
Mai. 2011.
56 EAB.
Enciclopédia agrícola brasileira.
3. ed. Brasília - DF:
Universidade de São Paulo e Escola Superior Agrícola Luiz Queiroz, 1995.
416 p. ISBN 85-314-0129-1.
57 TIJMENSEN, M.; BROEK, R. Clean power from farm wast international experiences with anaerobic digestion of farm manure.
Renewable Energy Word, v. 7, n. 2, p. 124 131, August 2004.
58 TRICASE, C.; LOMBARDI, M. State of the art and prospects of italian
biogas production from animal sewage: Technical-economic considerations.
Renewable Energy Word, v. 34, n. 3, p. 477485, Mai 2008.
Biogas from Waste and
Renewable Resources An Introduction. Heidelberg: WILEY-VCH
59 DEUBLEIN, D.; STEINHAUSER, A.
Verlag GmbH. KGaA, WMX Design, 2008. 245 p. ISBN 978-3-527-31841-4.
60 FREITAS, E.
Biogás.
Brasil Escola, Disponível em:
<http://www.brasilescola.com/geograa/biogas.htm>, Acesso em:
Fev. 2010.
Balanço Energético Nacional - Resultados Preliminares
- Ano base 2009. Ministério de Minas e Energia e Empresa de Pesquisa
61 MME.
Energética, Brasília - DF, Mar 2010.
62 MME.
Plano Nacional de Energia 2030.
Disponível em:
<<http://www.epe.gov.br/PNE, Acesso em: out. 2010>.
Resolução Normativa No 390 de 15 de Dezembro
De 2009 - Outorga de autorização para exploração de usinas
termelétricas e outras fontes alternativas de energia e registro
de centrais geradoras com capacidade instalada reduzida. Agência
63 ANEEL.
Nacional de Energia Elétrica, Dezembro 2009.
64 OGATA, K.
Engenharia de Controle Moderno. 4. ed. Minnesota:
Pearson Prentice Hall, 2011. 800 p. ISBN 8587918230.
137
Process modeling, simulation, and control for
65 LUYBEN, W. L.
chemical engineers. 2. ed. Pennsylvania:
McGRAW-HILL, 1996. 749 p.
ISBN 0070391599.
Introduction to instrumentation, sensors, and
process control. 1. ed. Norwood, MA: Artech House, Inc, 2006. 354 p.
66 DUNN, W.
ISBN 1-58053-011-7.
67 MACHADO, L.
Engenharia de Controle Moderno.
UFSC,
Florianópolis, 2004.
68 WILLIS, M.
Proportional-Integral-Derivative Control.
2. ed.
Departament of Chemical and Process Engineering, University of Newcastle,
Newcastle, 1999.
69 INSTRUMENTS, N.
Controle PID. National Instruments, Disponível
em: <http://digital.ni.com/worldwide/brazil.nsf/web>, Acesso em: Fev.
2010.
Increasing Customer Value
of Industrial Control Performance Monitoring Honeywell
Experience. 6th International Conference on Chemical Process Control,
70 DESOBOROUGH, L.; MILLER, R.
AIChE Symp. Serie 326, New-York, 2002.
71 ASTROM, K. J.; HAGLLUND, T.
and tuning. 2. ed. [S.l.]:
PID controllers: theory, design
Lund Institute of Technology: Isa, 1994. 343 p.
ISBN 1556175167.
72 TAKATSU, H.; ITOH, T. Future needs for control theory in industry:
Report of the control technology survey in japanese industry.
IEEE -
Transaction on Control Systems Technology, v. 7, n. 3, p. 298305,
May 1999.
73 FRANKLIN, G.; POWELL, J. D.
Systems. 4. ed. [S.l.]:
Feedback Control of Dynamic
Prentice Hall, 2002. 910 p. ISBN 0130323934.
74 GOODWIN, G. C.; GRAEBE, E.; SALGADO, M. E.
Design. 1. ed. [S.l.]:
Control System
Prentice Hall, 2000. 908 p. ISBN 0139586539.
138
75 ENDER, D. B. Process control performance: Not as good as you think,
control engineering.
Industrial Computing - ISA journals, p. 40 51,
Aug. 1993.
76 MATIAS, J. Teoria de controle PID.
Revista Mecatrônica Atual,
São Paulo, v. 3, 2002.
77 CASSIOLATO, C.; ALVES, E. Medição de vazão.
Controle e
Instrumentação, São Paulo, v. 11, n. 138, p. 7078, Nov. 2008.
78 CHAU, P.
MATLAB.
Chemical Process Control: A First Course with
San Diego: University Of California, 2001. 307 p. ISBN
521-80760-3.
79 POLLARD, A.; et al.
Flow control fundamentals and practices. 1.
ed. Berlin: Springer, 1998. 527 p. ISBN 3540639365.
80 DELMEE, G.
Manual de Medição de Vazão. 3. ed. São Paulo:
Edgard Blucher, 2003. 366 p.
81 SCHNEIDER, P.
Medição de Velocidade e Vazão de Fluidos.
GESTE - Grupo de Estudos Térmicos e Energéticos - Escola de Engenharia
- UFRS, Porto Alegre, 2000.
82 NATALE, F.
Automação Industrial. 10. ed. Revisada e Atualizada,
São Paulo: Érica, 2000. 256 p. ISBN 8571947074.
IEC 61131-3: programming
industrial systems - concepts and programming languages,
requirements for programming systems, decision-making aids. 2.
83 HEINZ, J. K.; TIEGELKAMP, M.
ed. London: Springer, 2010. 348 p. ISBN 978-3-642-12014-5.
84 ROSARIO, J.
Princípios de Mecatrônica. 1. ed. São Paulo:
Prentice
Hall, 2005. 368 p. ISBN 8576050102.
85 ELIPSE.
HMI/SCADA software - manual do usuário. 2.29. ed.
Porto Alegre: Elipse SCADA Ltda, 2008. 102 p.
86 LJUNG, L.; SODERSTROM, T.
Identication. Massachusetts:
Theory and Practice of Recursive
MIT Press, 1987. 552 p. ISBN 0262620588.
139
87 COELHO, A.; COELHO, L.
Lineares. 1. ed. Florianópolis:
Identicação de Sistemas Dinâmicos
UFSC, 2004. 181 p. ISBN 853280280X.
A
Esta dissertação foi produzida com L TEX.