1
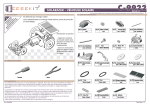
Robot Kit Echappe C-9813 FADISEL S.L. âã Les noms et marques registrés qui sont cités sont de la propriété de leurs respectifs titulaires. 1 . INTRODUCTION Le robot KIT Echappe fonctionne comme un “robot d'intelligence artificielle”. Il trouve toujours la sortie des labyrinthes. Ses trois senseurs d'infrarouges détectent les obstacles et leurs signaux sont gérés par un microprocesseur qui « réfléchit » et trouve la meilleure solution pour manœuvrer et éviter les obstacles. Il processe l'information de son entourage et réagit lui-même face aux obstacles rencontrés. Le Robot Echappe marche grâce à ses 6 pattes. Le kit inclut deux types de pattes avec un design différent, présentant des formes de marche très amusantes. Ce robot fonctionne avec 4 piles de 1,5V, type AAA (non comprises), aussi bien pour le fonctionnement électronique que celui des moteurs. 2 . OUTILS NECESSAIRES Fer à souder Piles AAA - 4 unités Etain Pinces Pinces coupantes Tournevis 2 . LISTE DES COMPOSANTS ELECTRONIQUES. Résistances Couleur Valeur 10 1.2K 2.2K 100 1K 10K 22K Marron Marron Rouge Marron Marron Marron Rouge Noir Rouge Rouge Marron Rouge Orange Orange Noir Rouge Rouge Noir Noir Noir Rouge Condensateur céramique Valeur 10 30 2 pcs 103 1 pc 104 3 pcs 224 1 pc Transistors Modèle Or Or Or Or Or Or Or LED 5mm Rouge 9013 1 pc 8050 7 pcs C945 4 pcs Support LED 3 pcs Rojo Rojo 1 pc + ID 1pc ID Diode Emettrice (LED) Infrarrouges 5mm 4 pcs Circuit Intégré Buzzer Condensateur électrolytique 100uf 8550 1 pc 4 Valeur 4 pcs 2 pcs 1 pc 1 pc 5 pcs 1 pc 4 pcs Modèle 78P156 1 pc ID Diode Zéner Modèle 3.9V Socle pour le circuit intégré ID 1 pc 1 pc Connecteur (base) Oscillateur Modèle 3 pcs (transparent) 4MHz (4.000) C-9813 Rev. 0645 1pc 1 pc Pag: 1/6 Module récepteur infrarouges Terminaux Interrupteur coulissant 1pc 4 pcs Support piles 1 pc Circuit imprimé R14 1 pc Q4 Q12 R12 R4 R2 R5 1pc 21-886 Orange K 1pc C1 ZD1 R18 R13 Q7 Q11 LED4 Q3 R11 R15 M Bleu Q13 Q14 Q2 BAT. 1pc R10 MOTOR WIRE Vert BZ1 R1 IR_RX_MOD C5 R7 LED2 SW R17 IR_RX_MOD Q1 OFF 1pc K LED3 XTAL R16 M1 R8 IC1 Jaune Q6 Q10 C2 C3 C4 M MOTOR WIRE 21-886 R6 ON Connecteur avec câble Q8 Q15 Q16 R3 EC1 M2 K R9 K Q9 Q5 LED1 4 . LISTE DE COMPOSANTS MECANIQUES P13 P15 Vis P14 2 pcs 2 pcs (3x6mm) (10mm) P16 Vis Corps P17 Séparateur hexagonal 1 pc Tube P18 Ecrou 4 pcs 2 pcs (3x6mm) (M3) 2 pcs 5. MONTAGE DU CIRCUIT IMPRIME R14 Q8 Q4 Q15 Q16 Q12 R12 R4 R2 Q6 Q10 C2 C3 C4 M MOTOR WIRE 21-886 R6 K LED3 R5 ON XTAL C5 OFF BZ1 R1 K R7 IC1 LED2 SW R17 IR_RX_MOD Q1 R16 M1 R8 R10 MOTOR WIRE Q13 Q14 C1 R13 Q2 R15 Q7 X L’identification (I.D.) de chaque composant Q11 R3 EC1 est imprimée sur le circuit imprimé LED4 Q3 R11 M BAT. ZD1 R18 M2 K R9 K Q5 Q9 LED1 Etape 1: Nous vous recommandons de commencer par les composants de moindre hauteur tels que les résistances et les diodes Zéner. I.D. Description Qté Couleur R18 100 Marron Noir Marron Or 1 pc R11 /12 /13 /14 10 Marron Noir Noir Or 4 pcs R3 / 4 1.2K Marron Rouge Rouge Or 2 pcs R1 2.2K Rouge Rouge Rouge Or 1 pc R5 / 7 / 8 / 9 /10 1K Marron Noir Rouge Or 5 pcs R15 10K Marron Noir Orange Or 1 pc R2 / 6 /16 /17 22K Rouge Rouge Orange Or 4 pcs C-9813 Rev. 0645 Pag: 2/6 Description I.D. Zener 3.9V ZD1 1 pc Etape 2:Montez et soudez les composants comme les condensateurs, transistors et l’oscillateur. Description I.D. C2,C3 Condensateur céramique 30 2 pcs C1 Condensateur céramique 103 1 pc C4 Condensateur céramique 104 1 pc C5 Condensateur céramique 224 1 pc Description I.D. Condensateur électrolytique 100uf EC1 1 pc Description I.D. Q5 / 6 / 7 / 8 Transistor 8550 4 pcs Q2 Transistor 9013 1 pc Q1 / 3 / 4 / 9 / 10 / 11 / 12 Transistor 8050 7 pcs Q13 / 14 / 15 / 16 Transistor C945 4 pcs 1 pc Oscillateur 4MHz XTAL Etape 3: Montez et soudez le socle du circuit intégré, la base du connecteur, l´interrupteur , le buzzer et les terminaux. Description I.D. 1 pc ID IC 1 Socle BAT. Base du connecteur 1 pc BAT. SW. Interrupteur 1 pc BZ1 Buzzer 1 pc M1(+ ) M2(+ ) + 4 pcs Terminaux Etape 4: Montez et soudez le LED 5mm rouge, les LED infrarouges et le circuit intégré 1602BP. Description I.D. LED 5mm (rouge) LED 1 1 pc LED 5mm infrarouge (transparent) LED 2 / 3 /4 3 pcs Attention: support LED LED infrarouge 5mm K K K circuit imprimé IC 1 78P156 ID Faire coincider les deux marques socle ID C-9813 Rev. 0645 1 pc Pag: 3/6 Etape 5: Montez et soudez le module Récepteur d’Infrarouges. Description I.D. Module Récepteur d’Infrarouges. IR_RX_MOD 1 pc Attention: coté inférieur 21 -8 IR_ 86 RX _M OD IR_RX_MOD ETAIN 21 -8 IR _ 86 RX _M OD circuit imprimé Circ. Imp. 6. MONTAGE MECANIQUE 1 Tout d’abord montez la boite à engrenages avant de continuer les process de cette section. (Consultez le manuel d’instructions de la boite d’engrenages.) 2 Placez l’axe du moteur comme l’indique le schéma afin de 3 Montage du support de piles souder les câbles et le condensateur céramique. câble orange 104 104 câble vert P13 x2 câble jaune P15 x2 câble bleu condensateur céramique 104 Orange P14 x2 circuit imprimé terminé Vert Bleu Jaune C-9813 Rev. 0645 Pag: 4/6 4 Assemblage du circuit électronique dans la boite d’engrenages. Orange P5 x4 Vert Bleu Orange Bleu Jaune Jaune Vert Nota: Les câbles jaune et vert doivent aller sur la partie frontale (du même côté que les LEDS infrarouges) 5 Assemblage du corps et du tube P14 x2 P18 x2 Jaune Vert Orange Bleu P17 P16 x2 6 Connexion 7 Produit terminé M1(+) M1(-) Orange M2(+) Bleu Jaune M2(-) Vert M + M2 M + M1 Vert Jaune M + M 2 Orange Bleu M + M 1 C-9813 Rev. 0645 Pag: 5/6 7. FONCTIONNEMENT 1. - Positionnez l’interrupteur sur "on". Le LED 1 s’allumera, l’unité émettra 3 bips sonores et commencera à fonctioner. 2. - Lorsque l’unité commence à fonctionner, les diodes LED2, LED3 et LED4 envoient de manière séquentielle des signaux infrarouges qui détectent les obstacles le long de sa trajectoire. Dès qu’un obstacle estdétecté, le signal reçu est transmi au module de réception, et celui-ci l’envoie au Robot Echappe pour que ce dernier adopte les actions pertinentes pour échapper A) Lorsque la diode émettrice de la droite détecte un obstacle, l’unité émet un bip sonore et le moteur gauche inverse le sens de la marche. B) Lorsque la diode émettrice de la gauche détecte un obstacle, l’unité émet un bip sonore et le moteur droit inverse le sens de la marche. C) Lorsque la diode émettrice du centre détecte un obstacle, l’unité émet deux bips sonores et les deux moteurs inversent le sens de la marche. Puis l’opération (a) décrite plus haut se répètera. D) Si les trois diodes émettrices détectent des obstacles, l’unité émet trois bips sonores et le mouvement qu’il suivra sera le même que celui décrit en (c). Cependant, le virage qu’il prendra sera plus ample. 8. EVENTUELS PROBLEMES 1. Il est convenable de s’assurer que chaque composant soitcorrectement installé à l’emplacement qui lui est réser vé sur le circuit imprimé. Tenez en compte la polarité des diodes émettrices d’infrarouges. 21 IR_ -88 RX 6 _M OD 2. Différents types de piles, plus ou moins puissantes, affectent énormément la sensibilité de détection. Essayer d’ajuster l’angle du module récepteur pour une réception optimale. 9. SCHEMA DU CIRCUIT ELECTRONIQUE +6V VDD BZ1 LED2 <Front> IR_TX +6V LED4 <Right> IR_TX +4.5V LED3 <Left> IR_TX Motor CON.1-1 R17 R16 22K 22K Q7 1K 8050 Left IR_TX Q3 R7 1K R4 1.2K VDD 1K 8050 C4 ,5 B5 ; B0 2 ' C945 C1 MOTOR C2 30 +4.5V R2 4MHz 30 R6 Motor CON.2-1 22K C3 Q6 Q8 Motor CON.2-2 EC1 100uF C945 RED 8550 Q12 MOTOR M1 LED1 8050 3.9V C945 - 1K ZD1 Q16 Q10 R9 100R 10R Q15 + Motor CON.2-1 Motor CON.1-2 Motor CON.1-1 Left IR_TX VDD R18 BATTERY DC 4.5V_6V. 8550 A +6V R14 10R Right IR_TX BUZZER (BiBi) Front IR_TX DATA DATA +4.5V Motor CON.2-2 22K R12 8050 - XTAL 8050 78P156 (1602BP) 103 Q11 M2 10K 224 C945 8550 104 ,& R15 C5 Q14 Q9 VDD VDD 10R Q13 Q4 R8 8050 10R 8550 + 9013 Right IR_TX Q1 R5 R3 1.2K R13 A Q2 1K R1 2.2K Front IR_TX BUZZER (BiBi) BUZZER Motor CON.1-2 Q5 R11 R10 +6V 8050 POWER SW SW-SPDT C-9813 Rev. 0645 Pag: 6/6