1
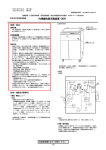
海洋科学技術センター試験研究報告 JAMSTECTR 21 (1989) ドル フィン ー3K 用 追 跡 ・監 視 シ ステ ムの 開 発 高 橋 賢 一 *1 服 部 陸 男 ’1 野 本 昌 夫 ’1 青 木 太 郎 ・1 無人探 査機 ドル フ ィンー3K の オペレ ーショ ンを 安 全 かっ 効率的 に実施 す るた め に追 跡監 視 システ ムを 開発 した 。本 システ ムは ,ド ルフ ィ ン ー3K のビ ーグル オペ レ ータ及 びそ の指揮者等が ,ビ ー グルの操 縦 につ いて適切 な判断と指示を 行 う ため に必 要な情報を与え る情報処理表示 装置で あ る。すな わち,既存 の ビ ーグル オペレ ーショ ンシステ ムで 集収 さ れた デ ータか ら ,ビ ーグル,テ ザ ーケ ーブ ル,海 底 ビ ー コ ン及び支 援母船 の位 置関係等を 容 易に把 握でき るよ うな 情報 と して リ アルタ イ ム で 演算表示 させ る装 置であ る。本 システ ムは ,パ ーソ ナルコンピュ ータとそ の入出 力 機 器及び通信演算 用プ ロ グラ ム等 の ソフト ウェアか ら構成 さ れて いる。本 シ ステ ムは, 1987 年 4月 から1968 年 8月 の問 に, 支援母 船 「かい よ う」な らびに「なっ し ま」で行 われた数 十回 のド ル フィンー3K の運用 にお いて ,ソフト ウ ェア等 の改造 , 修正 がなさ れ実用 とな った。 キ ーワ ード :ビ ーグルの追跡 ,テ ザ ーケ ーブル ,ド ルフ ィ ンー3K の運用 Acoustic PositionTracking and Monitoring System for DOLPHIN-3K Ken-ichiTAKAHASHI*2 Mutsuo HATTORI*2 Masao NOMOTO*2 Taro AOKI*2 An acoustic tracking and monitoring system was developed for safe and effective operation of the DOLPHIN-3K. This system is composed of data processing and displaying devices which provide position information for appropriate operational decisions and instructions to vehicle operators and a commander. The system provides CRT displays of real time vehicle-tracking,tether cable monitoring and 3-dimensional positions of the vehicle, transponders and the support vessel. The system is composed of 2 Personal Computers with input/output devices and software which consists of the programs for communication and computation. The system was made practically use after the repeated improvement during training operation of the DOLPHIN-3K aboard support vessels "KAIYO" and "NATSUSHIMA" during April 1987 to August 1988. 睾1 深 海開発 技術部 ●2 Deep Sea Technology Department 2り9 Key word: acoustic position tracking, tether cable monitoring, DOLPHIN-3K, vehicle tracking,ROV operation 本報告 で は,最 初 にドル フィ ン ー3K用音 響測 1. は じ め に 有 人潜 水船 「し んかい2000 」 の事 前調 査と 救 位 システ ムの概要 につい て述 べ ,次 に本 追跡監 視・ 難の ため に開 発建 造 さ れた無人 探 査機 ドルフ ィ ン システ ムの必 要性 ,構成 な らび に機能 について述 −3K は, 1987 年 に完成 し た。 その後,当 セ ンタ べ る。 なお, ドル フィ ン ー3K の全体 シ ステムな ーの海 中作業 実 験船「 かい よう」 で性 能及 び運用 らび にその運 用方法 等 の詳細 につ いて は, 文献1) , 試験 等 が行 われ,さ ら に潜 水船支挺母 船 「 なつ し 2) を 参照 され たい。 ま」にお いて 運用訓 練 が行 われた。 これら の運用 経験 か ら,無 人探 査機 ドル フィ ン ー3K の オペレ 2. の 概要 ーショ ンをよ り安 全かつ 効率 的 に実施 するために, ビ ーグルの操縦を 支 援する追 跡監 視 システ ムの開 発 が必要 であ る ことが わか った。 ド ル フ ィ ン ー3K 用音 響 測 位 シ ステ ム ドルフィン ー3K の オペレーションシステムは,独 立 した専 用 の音 響 測 位装 置 を 持 って お らず ,支 援 本 シ ステ ムは, ドルフ ィン ー3K のビ ーグル オ 母 船 の測 位装 置 にド ル フ ィ ン ー3K 用 の受 信 機等 ペレ ータ ー及 び その指揮 者等 に, ビ ーグル の操縦 が テ ンポラリーに付加 さ れた ものと な って い る。し につ いて 適切 な判断 と 指示 が行え るよ うな情報を た が って , そ の基 本 的 な運 用 形 態 は支 援 母 船 で あ 提供 す る ものであ る。 すな わち,既存 のビ ーグル る 「なつ し ま 」 ま た は 「 か い よ う 」 の音 響 測 位装 オペレ ーシ ョ ン システ ムで収 集さ れた デ ータを , 置 によ って決 定 さ れて い る。 容易 に把 握 で き るような情報 に リアル タ イ。ムで演 図 1 に ド ル フ ィ ン ー3K の音 響 測 位 シ ス テ ムの 算表 示す る システ ムであ り, し か も既 存 の装 置 に 概 要 を ,表 1 に そ の概 略 仕 様 を 示 す 。 測 位 の原理 おいて最 小限 の 改造で すむ もので なけ れば な らな は主 にSSBL い。 イ ン) によ る も ので , 支 援 母 船 に 設 置 さ れて い る 方 式 ( スーパ ーシ ョ ート ベ ー ス ラ 図 1 ド ルフ ィンー 3K 音響 測位 システ ムの構成 Fig.I An acoustic positioning system for Dolphin 300 ―3K JAMSTECTR 21 ( 1989) 表1 Table. 1 ド ルフ ィ ン ー3K音響 測位装 置 の性能 Specifications of an acoustic positioning system for Dolphin − K 3 受 波 器 から ビ ーコン の測位 信号を 支援母 船 の測位 K用 測 位装置 のデ ータ処 理表 示用 PC へ, そ れぞ 装 置系 と並列 に取 り込 み, 3K用 の受 信機で 信号 れRS ―422 及びRS-232C 処理 等を 施し た後 ,測位 デ ータを数値 で 同受 信機 受 信 さ れて い る。 また, こ れら のデ ータは PC の の盤 面上 に表 示 してい る。 さら に, この測 位 デ ー フロ ッピ ーディ スクへ収 録 さ れて いる。 通信回 線を 介 して送 タ はデ ータ処 理表 示装置 であ るパ ーソ ナル コ ンピ 一方 ,音 響 ビ ーコン は, ビ ー グル用 にレ ス ポン ュ ータ (以下 PC とい う) によ って支援母 船 を基 ダを , テ ザ ーケ ーブ ル の追跡 用 と海底設 置用 には 準 と し た平面 座標 に作画 さ れ, ビ ー グル に関 す る ト ラン スポンダを 使用 してい る。 ト ラ ン スポ ンダ 一部 の数値 デ ータ と共 にCRT画 面 に表 示 さ れて は支挺母 船 の送波 器か らの音 響質問 信 号に よって い る。 この測 位画面 の表 示 は, ビー グル操縦 用 コ 応答 する 。 それに対 して , レ ス ポンダ はビ ー グル ンテ ナハ ウス内 の総 合操作盤 上 のモニ タ ーテレ ビ シス テ ムの テザ ーケ ーブ ル によ るPC M光 通信回 等 へ も伝送 さ れて い る。 な お,測 位画面 の他 に。 線を 介 した質 問信 号によ って 応答 す る。 し たが っ ビ ーコ ンの測 位と母 船方 位等 のデ ータ は3K 用 の て, レ スポンダ の質 問信 号 は種々 の音 響 雑音 (特 測位 装置 から同 コ ンテ ナハ ウ ス内 のデ ータ処理装 に ビ ーグル自身 のもの ) の影響 を受 けない ため 安 置 へ, またビ ーグ ル方 位等 のビ ーグル に関す る一 定 した測 位が行え る。表 2にレ スポンダの性能を 部 のデ ータは ビ ーグル デ ータ処理制 御装 置 から 3 示す 。 なお ,この レ スポ ンダの電 源は外部 から 給 J AMSTECTR 21 ( 1989 ) 301 表2 Table.2 ド ルフ ィン ー3K 用音響 ビ ーコ ンの性能 Specifications of an acoustic beacon for Dolphin ― 1 、 ビ ーコ ン 方式 レ ス ポン ダ 方 式 ( 質 問 信 号 はテ ザ ー ケ ーブ ル を 介 し て伝 送 ) 2、 送 信 周 波 数 15.5 kHz 3、送 信音圧 9 4 d B (re l μbar at lm ) 以上 4.受 信信号 レ ス ポ ン ダ ト リ ガ[lOnsec i-7*ン ]レクタ740) 5 拿) 発 信周 期 発 信寿 命 ピンガ ー モ ード 3 7 6 6。 耐 水 圧 ( 送 信 パ ル ス4610msec) 6 0 sec 3.6 ≫ 104 回 (25 日 ) k g f / c m 2 7、 外 形 8 6 0 11 L、 1 5 5 mm φ 8、 重 量 2 2 kg ( 空 中 )、12 kg (水 中 ) 拿) レ ス ポン ダ ヘ の 外 部 給 電 が断の 時 、 ピ ン ガ ーモ ードに 切換 わ る 。 電さ れて い るため ,そ の電 源が途 絶え た時 ,す な るデ ータの表 示は, LED 文字 表 示素子 によ る数値 わち ビーグル のテザーケーブルが切断 さ れた時 は, 表 示 のみと な って おり ,測 位デ ータ の表示画面 も 自動 的 にピ ンガ モ ード に切 り替 わり, 発信 する 。 先 に述べ た 一画面 のみ とな ってい る。した がって , その発 信 寿命 は約25 日間で あ る。 こ れらのデ ータを加工 して 実際 のビ ー グル の運用 なお, ドルフ ィ ン ー3K用 音響 測位装置 の詳 細 につ いて は文献 3)を 参照 さ れたい。 3. 追 跡監 視 システ ムと して必要な 機能 状況 に即 し た形式 で表 示 するこ とがで き れば, よ り安 全 かつ効率的 な操 縦を 行 うこと がで き る。 3.1 既 存 の測位表 示画 面 の改造 ド ルフ ィ ン ー3Kの操 縦 は, 移動 可能 な コ ンテ ドルフ ィ ン ー3K システ ムの完成当初 , ビ ーグ ナハ ウ ス内 の総 合操作盤 で行 わ れる。 この総 合操 ルの操縦 者に与 え ら れたビ ーグルの位置を表 す情 作盤 は, ビ ーグルのテ レ ビカメ ラの映 像を表 示 す 報 は,船 位基準 の平 面 グラフ によ る測 位表示画 面 るモニ タ ーテレ ビを中心 と して ,デ ータ表 示パ ネ のみで ,そ の実際 の距離を 直接的 に数値 によって ルや 操縦 のため の多 くの スイッチ並 び にメ ータ類 読 み取 るこ とがで きなかった 。 その ため ,操 縦者 等 か ら構成 さ れて いる。 これら の機 器は, 限 ら れ はビ ーグル ,海底 ビ ーコン及び支援母 船 の大 略的 た盤 面 内 に効 率良 く配 置 さ れて おり ,その実装 密 な位置関 係 のみし か知 るこ とがで きず ,任 意 の目 度 がた いへ ん高 い ものと なってい る。 このよう な 標位置 や海 底 のト ランス ポンダ ビ ーコンヘ 接近 す 限 ら れた スペ ースのため に, ビ ーグル の操 縦 に必 るよ うな ミッ ショ ンは, たいへ ん困難 な ものであ 要 な ビ ーグル自身 の状 態 や支援 母船 の状態 に関 す った。 そこで, 既存 の測位表示 画面 から一部の グ 302 JAMSTECTR 21 ( 1989 ) ラフを削除 して ,以下 に示 すよ うな数値 デ ータ の 表示を 追加 し たO (3) ビ ーグル位 置 とビ ーコン位 置の間 の距離 を表 す データ (1) ビーグルの位 置 座標V とその スラント距 離Sv 水平距 離 :DTXY (xv-xn)2 V =( χv≫yv. zv) S V= χ V ’ = 十 yV2十Zv2 十(y V− yn)2 垂 直距 離 :DT Z= ZV− Z。 実 効 距 離 : DSL = (2) ビ ーコンの位 置座 標Tnとそ のス ラント距離 、/(χV−χV)2十(yv-y 。)2十(zv-z S。(添字 n は ビ ーコンの番号を 表す ) Tn °( Xn, n y ,Zn ) 。)2 こ れ ら の数値 デ ータ表 示 の追 加 によ って 、 目 標 位置 へ接 近 す る 際 の操 縦 がたいへん容 易 とな った 。 Sn 一 一 Xn2 十 yn2 十 Zn2 写 真 1 に改 造 後 の測 位 画 面 を 示 す 。 写 真1 Photo 1 J AMSTECTR 21 ( 1989 ) 改造後の測位画面とその説明図 The reformed graphic display and the diagram. 303 さ ら にその 後,ド ルフ ィン ー3K の運用 が慣熱 3K にお いて は, ビ ーグル指揮者 等 ( ナビゲ ータ す るの にと もなって , この母 船 の位置を基準 とし 等 )が測 位画面 に表 示さ れた ビー クノ レの位置を 読 た一画面 の グラフ の みでは ビー グル の行動 に関 す み取 って海 図上 に随時プ ロット し,ト ラッキ ング る的確 な判断 や予 測が十分 に行え ない ことが わか チ ャートを 作成 してい た。 こ の場合, 既存 の シス った。 テムで は ビー グルの測位が 船位基準で ,すな わち 船位を 原点 として表 示さ れて い るので ,海 底 の任 3.2 ビ ー グルの運 用 に即 した 位置デ ータ の表示 意 の位置(多 くの場 合海底 ビーコンの位 置と なる ) を 基準 とした もの に計算し 直してプ ロ ットす るた 一般 に,有 人潜水船 あ るい は曳 航体等 の潜 航行 め, こ れ らの作業 はビ ーグル指揮者 等 に とって 大 動 の場 合 ,先 ず 支援母 船 は電波 航法等 によ って そ きな負担 となってい た。 さら に, このト ラッキン の海 域 に向 い ,直接 その潜 航 目標位 置ヘ ト ラン ス グチ ャート の作 成 は,ビ ー グル の操 縦用 コ ンテ ナ ポンダビ ーコ ンを投 入す るか, ま たは その海 域 の ハ ウス内部 が狭 い た め支援 船内 の別 室で 行い , そ 海 象を 考慮 にい れた目標 位置 の付 近 に ビーコ ンを こか ら電 話等 の通信手段 によ って ビ ーグルの 進路 設置 す る。そ の 時点 からその海 域 における行動 は, を操縦 者 に伝え た。 したが って ,操 縦者 はビ ー グ 設置 さ れた海底 ビ ー コンを基準 にして行 わ れる。 ルの位置 や目 標位置 の把 握が迅速 に行え ず, ビ ー し たが って , ビ ーグル におけ る潜 航行動 において グルの操 縦 に関 す る判断 の遅 れがしばしば生 じた。 も,つ ねに海底 ビ ーコンを 基準 と した もので あ る これらの不 具 合を 解 決す るた め に,ト ラッキン グ ことが望 ましい 。 チ ャート作 成 の自動 化 とその 進路 指示 の迅速 化が す な わち,基準 とす る( 原点 とす る )ビ ー コン 望 まれた。 の位置 座標を T。,船 位を 基準 とし た各 ビ ーコンと ビ ーグルの位 置座標を そ れぞ れT V とす ると, . ビ ーコ ンを 基準 とした各 位置 座標 は次 のよ う に表 す ことが で きる 。 3.4 時系 列デ ータ の表示 ビ ーグル, テザ ーケ ーブ ル等 の状態 を表 すデ ー タの時刻 歴を 表示 さ せ ると, ビ ーグル の行動 予測 (ただし, 添 字n は にたいへ ん有 効で あ る。 先 に も述 べ た ように, ビ 複数 の海底 ビ ーコンを用 いた場 合 のビーコン番 ーグル の操縦 を行 う総 合操作 盤面 上 に は操縦 に直 号を示 す ) 接必 要 な多 くの デ ータが数値 で表 示されているが, ① 海底 ビ ーコンの座標TBn T Bn一 T n一 T0 ② 支援母 船 の位置 座標 M8 MB= 一T0 デ ータ の時刻歴 は表 示さ れて い ない。 既存 のシ スヽ テ ムに おいて , ビ ーグル オペレ ータ ー及び その指 揮 者等 は,盤 面 に表 示 されてい る数値 デ ータで現 ③ ビ ーグルの 位 置座標 V8 状 の ビ ーグルの状 態 のみを把 握す る のに 精一杯 で VB= V − T。 あり, 過去 の行動 軌跡 (潜 航開 始 後か ら その時点 さ らに, 予め海図等 によ って 特定 さ れた目 標地 まで の)か ら現 在の ビ ーグルの状態を 踏 まえた潜 点 の位 置 は,当 然 の こと なが ら緯度 , 経度 によ っ 航 進路 等 の行 動予 測を 的確 犀行 うことが難 しい も て表 さ れて い る。 したが って , ビ ーグル,海 底 ビ のとな って いる。 し たが って,時 々刻 々変 化す る ーコン及び 支援母船 の位置 も常 に緯度, 経度 で C その状 態を 表す デ ータ の時刻 歴を 時系 列 グラフ と RT ディ スプ レ イ等 に表 す ことができ れば, 各 位 して表 示さ せる こと は,た いへ ん有効で ある。特 置 の把 握を容 易 に行 うこ とがで き る。 にテザーケーブルの状 態 は,ビー グルの 行動 に直接 的 に影 響を与 え るた め, その三 次元 カ テナ リーの 3.3 潜 航海 域 の等 深線 を描 い たトラ ッキ ングチ ャート の作 成 推定予 測表 示 によ る リアル タ イ ムの監 視 が必要 で あ る と考 え ら れる。 しかし ,既 存 の シ ステムが持 ビ ーグルの潜 航中 の行 動を効 率良 く安全 に行 う ってい る ハ ード ウェ アの環境下 で は こ れらの推定 た め には, そのト ラッ キン グチ ャート (潜 航 航跡 ・予測 の表 示 は困難 であ るため ,既存 の システム 図 )の作 成 が不可 欠で あ る。 既存 のド ルフ ィン ー で得 ら れる デ ータを 加工 して その状 態を知 り, 予 304 JAMSTECTR 21 (1989) 4. シ ステム の構 成 測す る必要があ る。 こ れらの 観点 か ら,次 の 5種 本 システ ムは,既 設の 3K 用音 響測位 装置 のデ 類 の データを 選定 し た。 ① ビ ーグル の深度 D ータ処理表 示装 置 から伝送さ れ るソー スデ ータ に ② ビ ーグル のス ラント 距離 Sv 演算 処理を 施 して ,先 に述べ た機 能を達 成す るた ③ テ ザーケ ーブ ルの繰 り出し 長 Lc め の情報処 理表 示装 置で あ る。 ’④ ケ ーブ ル の速度< JLc/^t) 4.1 ⑤ ケ ーブル余 長比 (LC /SV の比 ) 機器構 成 こ れらの時系 列 デ ータを 数値 デ ータ と共 に リア 本 シ ステ ムは, 複数 の パ ー ソ ナ ルコ ンピ ュ ータ ルタ イ ムで表示 させる こと によって , テザ ーケ ー とそ の入 出力 機 器 及 び 通 信 モ デ ム等 のハ ード ウェ ブ ルの状 態をある程度推定 予 測することができる。 ア と , デ ータ通 信 及 び 演算 用 プ ロ グラ ム等 の ソ フ トウ エ アか ら 構成 さ れて い る。 図 2 に本 シ ス テ ム 3.5 測位 デ ータ の三次元 表示 先 に述 べら れた測 位 デ ータ の表 示形 式 は, 深度 の機 器 構成 を 示 す 図 よ り, PC-1 は既 存 の シス O テ ムにお け る デ ー タ処 理 表 示装 置 であ るとと もに, 方向 の 情報を 数値 データで記 述し た二次元 平 面 に 表 3 に 示 し た ソ ー スデ ータを 1メ ガ バ イ ト 容量 の おけ る表 示が主 な もので あ っ た。有人潜 水船 や曳 フ ロ ッ ピ ー デ ィ ス ク に 収納 して い る 。 こ れら の ソ 航体等 の運用 において も,実 際の追跡作業 は海底 ース デ ータ の サ ンプ ル周 期 は , ビ ーグ ル に関 す る もしくは特定 の深度を 対 象 とした平面上 で行 われ, もの は 2秒 で ,音 響 測 位 に関 す る もの は そ の時 の 必要 に応 じて そ の深度 または 高度を 知 る こと のみ イ ン タ ロケ ート 信 号 の発 信 周 期 とな って い る。 本 で, 全 体 の空間的 な測位 イメ ージは必要 とさ れな シ ス テ ムの開 発 にあ た って は , こ の ソ ース デ ータ かった。 しかし,自 航力を 持 ち, かつ常 にケ ーブ を 他 の PC へ も伝 送 で き る よ う にRS-232 ルに拘 束 された本 ビ ーグル システ ムの場合 は, 海 出 力回 線 を 増 設 し, そ のプ ロ グ ラ ムの 改造 を 行 っ 底 の起伏, ト ランス ポンダ ビ ーコン及び その系 留 た。 C入 索 等 の障害物を含 め た ビ ー グル測位 の立体 的な イ 先 に述 べ た 本 シ ス テ ムに 必 要 な 機能 を リア ル タ メ ージを 直感 的 に把握 す る必要 があ る。 こ れら の イ ムで 実 現 す るた め に, さ ら に 2台 のパ ーソ ナル 観点 か ら,各 ビー コンの位 置 の三次元 表示を 容 易 コ ンピ ュ ー タ PC−2と PC−3を 導 入 し た。 こ れ に理 解 でき るよ うな表 現で ,しか もリアルタ イム ら 2台 のパ ーソ ナ ル コ ンピ ュ ータ には, PC-1 で表 示 させ ることが必 要で あ る。 増 設 さ れたRS- に 232 C 回 線 か ら新 た に準 備 した 光 モ デ ムを 介 して ソ ース デ ー タ が 伝 送 さ れた 。 P 3.6 オフ ラインで のデ ータ解 析と潜 航 。 調 査記 録 の作成 C−2 は,ビーグル の追 跡 に必 要 な 情報を 表 示 さ せ る た め に基 本 入 出力 機 器(CRT, キ ーボ ード ) の こ れまで に述べ た オン ライ ンによる デ ータの表 他 に デ ジ タ イ ザ, グラ フ ィ ッ クプ ロ ッ タ 及 び プ リ 示 は, 運用後 におい て も再現 でき る必要 があ る。 ンタを 各 1台 付 属 させ た 。 デ ジ タ イザ は海 図 か ら 特 に, ビ ーグルのト ラッキ ン グチ ャ ート はその潜 等 深 線 デ ータ を 読 み 込 む ため に, グ ラフ ィ ッ クプ 航行 動 の軌跡 を忠 実に表 す ことがで き, ビ ーグル ロ ッ タ は ビ ー グル の ト ラ ッ キ ン グ チ ャ ートを 描 く や ケ ーブル等 のデ ータ と共 に潜航 ,調 査記録 と し ため に 使用 した 。 ま た, プ リ ンタ はプ ロ ッタ に描 てい つで も再 現で きる必 要があ る。 さら に,収集 かせ た デ ータを 常 時 数 値 デ ータで 記 録 す る た め に さ れたデ ータ は,各 専門 分野 において必要な アル 使用 し た。 PC ―3 に は, テ ザ ーケ ーブ ル の監 視 に ゴリ ズ ムによ って解 析ま たは表現 さ れる こと もあ 必 要 な情 報 画 面 と測 位 の 三 次 元 情 報 画面 と の 二 つ る。 し たがって ,収集 さ れた デ ータの表 示を 潜 航 の画 面 を表 示 させ た 。 こ れ ら の二 つ の画 面 は , 1 時 間 に沿 って容 易 に再現 で き るよ うな機能 も必要 台 の C RT 上 で 必 要 に応 じて ど ち らか一 方 の 画 面 であ る。 に ワ ン タ ッチ で 切 り換 え るこ と が で き る 。 PC-3 のプ リ ンタ は, CRT の カ ラー画 面 の ハ ード コピ ー を 得 るた め に カ ラ ープ リ ンタを 採 用 した 。 JAMSTECTR 21 ( 1989 ) 305 図 2 追跡監 視 システムの機器構成 Fig. 2 Block diagram of the system 表 3 デ ータ処 理表 示装 置にお け るソ ースデ ータ Table. 3 Source data in data aquisition device 306 J AMSTECTR 21 (1989) また,ド ルフィ ン ー3K のオペレ ーショ ンシ ステ に六 つのプ ログ ラ ムで 構成 さ れ,こ れらの 全プ ロ ム自体 はテン ポ ラリ ーな もので あ るため, 本 シス グラ ム容量 は約80K バ イトで ある。図 3に そ の構 テ ムの配置方法 に柔軟 性を もたせ ,支援母 船 の変 成を 示 す。 これらのプ ロ グラ ムはキ ーボ ード上 の 更や運 用体制 の変 更 に伴 う設置場 所 の変更 を 容易 フ ァン クショ ンキーを 押 す こ とによって 実 行 さ れ に行 うこと がで きるよう に,遠 隔伝送 が可能 な光 る。 最 初 は追 跡作 業 の準 備 として,fl か らf5ま モデ ムを採 用し た。 で のフ ァンクション キ ーに割当て ら れた五つ のプ ログ ラ ムを 実行 する 。そ の後 , リア ルタ イムの追 4.2 プ ログラム の開発 本 シス テ ムに おけるプ ログ ラムの開 発 と そ の運 跡 プ ログ ラムによ って 実行 する。 (1) 通 信回 線 テ スト用プ ログ ラム 用並 びに実行 は ,既製 のデ ィ スクベ ース ・オペ レ ド ルフ ィン ー3K用 音響 測 位装置 から送信 さ れ ーティ ン グシ ステ ム上で行 わ れた。プ ロ グラ ムの る通信回線 と,支 援母 船 の電波 航法装 置 から送 信 開 発 は,主 に インタ ープ リンタ ー形 式 の ベー シ ッ ` さ れ る通信回線 の通信 テストを行 う。CRT上 に測 ク言語 によ って 行い, リアルタ イ ム( 実時 間 )処 位 デ ータ の数値列 を表示 させ る こと によ って そ の 理 が必 要 な一部 のプ ログ ラムは, ベ ーシ ックコン 通 信状態を 確認 す る ことができ る。 パ イ ラによ って オブ ジェ クト コード( 機械 語 )に 変 換 して使用 し た。プ ロ グラ ムの開発 にあ た って (2) 等 深線 図 の作 成 ・描画プ ロ グラ ム 潜 航海域 の等深 線 デ ータ を作成 し, その デ ータ は,以 下 に示す よう なこと に留 意した。 を グラフ ィックブ ロ ック に描画 させ る。本プ ロ グ ① オペレ ータ ーが容 易 に運 用で きる こと。 ラムは, さ らに以 下 に示 す 五つ のプ ロ グ ラ ムで 構 ② PCの使用台数を可 能な限 り 減らす こ と。 成 さ れてい る。 ③ 理 解し やす い形 式 の グラフ ィ ック表示を 行 う こと。 ① デ ジタイザの初期設 定 ② デ ジタ イザに よる等 深線 の読 み取 り ④ 開発 後 のプ ロ グラ ムの修正並 び に変更 が容 易 ③ 等深線 デ ータ の作成 に行 え る こと。 ④ ヘ ッダ ーフ ァ イルの作 成 ① について は ,プ ログ ラムの運 用を対 話形 式 で ⑤ CRTとプ ロ ッタ に描画 行 い, キ ーボ ード か らのパ ラメ ータ の入力 が最 小 ① から ④まで のプ ロ グ ラムは等深線 デ ータ の作 限度 とな るよう に配慮 した。 ③ につい て は,当 初, 成 を行 う ものであ り, 5万 分の 1の海底 地形 図 か 1台 のPCで 本システムを 構築 す る意図で 開発 を す ら潜 航海域 (緯度 3分 ,・経度 4分)を特 定 し, こ す めたが, 複数 の グ ラフィ ック画 面 の使用 と,可 れを 原図 と してデ ジタ イザで読 み取 る。 デ ジタ イ 能 な限 り処理 時 間を 短 くす るため に 2台 のPCを ザによ って PCへ 入力 さ れた各等深 線別 のフ ァイ 使用 した。 ③ について は, グラフ ィ ックの画 面を ルは,必要 に応 じて指 定さ れた等 深線 の間 隔で編 多色 による単 純 な表現方 法で 作成 する よ うに留 意 集 さ れ, その海域 の緯度 , 経度 やスケ ール等 のパ し た。 また, ④ について は, ベーシ ック言 語 によ ラメ ータを記 入し たヘ ッダ ーフ ァイルと共 にフ ロ るプ ログ ラムの記述 が理 解し やすいた め,容 易 に ッピ ーディ スクヘ収納 さ れ る。作成 さ れた等 深線 そ の内容 の修正等を 行 うこ とがで きる 。 デ ータ は, ⑧のプ ログ ラ ムによ って,PC のCRT 上 に描 画さ れるO CRT 上 に表 示 さ れた等深 線図 4.3 プ ロ グラム の構成 は, ビー グルの潜 航行動 の追 跡 に必 要 な範 囲を パ 本 システ ムのプ ロ グ ラムは以下 に述 べる追跡 用 ラメ ータ入力 によ って指 定 し, そ の指定 さ れた範 モニ タ ーと監視用 モ ニタ ーの2つ のプ ロ グラ ムか 囲を ト リミング,拡大 して表 示する。 写真 2に等 ら構成 さ れ, 2台 のパ ーソ ナル コ ンピ ュータで 実 深線図 の表 示例を 示す 。さ ら に, これら の等 深線 行さ れる。 図 は,追跡を行 う座標系 と スケ ールを 一致 させ た 後 , グラフ ィッ クプ ロ ッタ に描画 させ る ことがで 4.3.1 ビ ーグル追跡 用モ ニタ ー 追跡 用モ ニタ ーのメニュ ープロ グ ラムは, さ ら J AMSTECTR 21 ( 1989) き る。 このよ う に,本プ ロ グ ラムの等 深線を 描画 す る一連 の作業 は, ビ ーグル の潜 航時 直前 に, 潜 307 図 3‘ ド ルフ ィンー3K追跡用プロ グラムの構成 Fig. 3 Construction of the program for tracking mode 読み取 り 原図 の表 示 拡大,トリミングされた画面の表示 Displaying the original map Displaying the map magnified and trimmed 写真2 等深線図の表示例 Photo 2 Displaying the contour map 308 JAMSTECTR 21 ( 1989 ) 航海 域 の状況 に即 した潜 航範囲 の設定 を可能 に し て い る。 (3) 追 跡座標系 のパ ラメ ータ設定プ ロ グラ ム CRT 及び グラフ ィッ クプ ロ ッタ に表示 す る平 面 グラフ の座標系 を 設定 す る。 この座 標系 を決 め るた め に,以 下 に示 すよ うなパ ラメ ータを 対話 形 式で 入力する。 ① 座標軸 の スケ ール ② 共通 原点 の座標 及 び緯度 ,経度 ③ 目標点( ビーコン等 )の設定数 と その緯度。 経度 写真3 こ れら のパ ラメ ータは フ ァイル化さ れ, フ ロ ッ Photo 3 ピ ーデ ィス クへ 収納 さ れ ると共 に,以 後 のプ ログ 追跡モニタ ーCRT 画面の一例 CRT graphic display for the tracking mode ラムにおいて 参照 さ れる。 また, こ れら のパ ラメ ータ は追跡プ ロ グ ラムの実 行中 におい て も任意 に 変更す る ことが でき る。 (4) グ ラフィ ックプ ロ ッタ に座標軸 及びパ ラメ ー のマ ークは付 属 の指示棒 の方 向 によ ってそ の方位 が表示さ れて いる 。また, CRT 画面 の右 側には , タ等 を描 くプ ロ グラム 各 マ ークの緯度, 経度 が数値 表 示さ れ, これら の 座 標軸 , ラベル( 日時, グラフの見 出 し等 )及 マ ー クと数値 表示 は 1秒 毎 に更新さ れる。さらに, び (3) で 設定 し たパ ラメ ータ等を グ ラフ ィ ックプ ロ 画 面 の最上段 1ライ ンは現状 の グリッド スケ ール ッタ にプ ロ ット す る。 の表示 と,プ リ ンタ とグ ラフ ィ ックプ ロ ッタの動 (5) ドルフ バノー3K の追 跡を 実行 するプログラム 作 状態 等を示 す インジケ ータ ーとなってい る。画 本プ ロ グラムは, ドルフ ィ ン ー3K の追 跡 のた 面 の最下段 1ライ ンは対 話形 式で 行 うコメ ント の め に, CRT 画 面 に表 示 さ れるグラフと グラフ ィッ クプ ロ ッタにプ ロ ット さ れる グラフ とを 持 って い る。 こ れらの グラフ表 示 は,PC のフ ァン クショ 表 示 とパ ラメ ータの 入力 に使用さ れてい る。 ② グラフ ィ ックプ ロ ッタ によ るグ ラフ グ ラフ ィッ クプ ロ ッタ に よる グラフ は, ビ ーグ ンキ ーに割 り当 てら れた変 更パラメータ によって , ルの行動 軌跡をプ ロ ット す るト ラ ッキングチ ャ ー 表 4に示 したよ うな機能 の変 更を行 うことがで き トで あ り,そ の座標系 は基 本的 に CRT 画面 の もの る。 と同様 であ る。図 4に作成 さ れたト ラッキン グチ ① CRT画 面 の グラフ ャート の一 例を 示す。 グラフ上 にプ ロット さ れる 写 真 3にCRT 画面 の一 例を示 す。CRT 両面 上 プ ロ ット マ ー クは,図 のチ ャ ート右 中央 に描 か れ の グラフは, 縦 軸 の上 一下 方向を北 一南 にと った て い る 5種類 の図 形で 表さ れる。 ビ ーグル のプ ロ 直交 座標系 で表 し,緯 線方 向( 横軸 )を 六 つ に経 ット マ ークは三角 形で表 さ れ,変更 パ ラメ ータで 線方 向(縦軸 )を五つ に分割 し た正方 グリッドで 指定 さ れる時間 や深度 デ ータ と共 にプ ロ ット さ れ 区切 ら れて いる。座 標系 のスケ ールと原点 は ,設 る。 ビ ーグル方 位 はその三角形 の頂点 が 指し示す 定 また は変更パ ラメ ータ の グリッド スケ ールと共 角度で 表 さ れる 。参照点 は 3種類設 定す ることが 通 原点 によって 任 意 に設定される。共通 原点 は原 則 でき ,そ のうち の一つ は通 常, 共通 原点 と なる海 と して基準 ビ ーコンであ る海底ト ランス ポ ンダの 底 のト ランスポンダ ビ ーコン に,他 は任 意 の目的 位置 が採 用さ れてい る。 グラフ上に表 示 さ れ るカ 地等 に割当 て ら れる。 ビ ー グルの軌跡 は ,通常 , ラ ープ ロ ット マ ークは, 丸印で表さ れ, 水色 がビ 変更パ ラメ ータで設定 し た時間 間隔毎 にプ ロ ット ー グル, 支援母船 が白 色, 海底 ビーコンは紫, 赤 , さ れるが, 必要 に応 じて, 割込 みプ ロ ットス イッ 黄 ,緑 のいず れか一 色( 応答 周波数 によ って 選択 チ(表 4)によ って もプ ロ ット を行 う ことが で き さ れる )で表示 さ れる。 ビ ーグル並 び に支援母 船 る。 JAMSTECTR 21 ( 1989) 309 表4 Table. 4 追 跡 プ ロ グ ラ ム変 更 パ ラ メ ータ Modificative parameters during eχ e cuting the tracking program 4.3.2 テザ ーケ ーブ ル監 視用 モニタ ー 次元表 示 と テ ザーケーブル監 視用 デ ータの時系 列 本プ ロ グラ ムは, テザ ーケ ープ ルの監視 や ビ ー 表示を リアルタ イ ムで 行 う もので ,本プ ログ ラム グル等 の測 位 デ ータ の三次元表 示を リ アルタ イ ム の実 行 にあた って ,次 のような数値を 対 話形式 で で 行 うオ ンラ インモ ニタ ー用プ ロ グ ラ ムと, こ れ キ ーボ ード から入力 する。 らの表 示 とデ ータの再 現を 行 うオフ ラ イン用プ ロ ① ビ ーグル の潜航予 定最大深度 グラ ムの二 つか ら構成 さ れてい る。 こ れらのプ ロ ② 推定最 大 ケーブル長 グラム容量 は, オ ンラインモニタ ーが約40K ③ 潜航 予定時 間 バイ ト,オ フ ライ ンモニタ ーが約60K バ イト とな って これら の数値 は,三次元 座 標軸 と時系 列 の グラ い る。図 5にド ルフ ィ ン ー3K 監 視用 モ ニタ ーの フ軸 の スケ ールを設 定 する ものであ る。 数値 の入 プロ グ ラムの構成を 示す 。 力 後, ビ ーグル位置 の三次元表 示 が最初 に表 示さ (1) オ ンライ ンモ ニタ ー 本プ ログ ラ ムは ,ビ ーグル等 の測 位 デ ータ の三 310 れ ,表 5に示 した フ ァンクシ ョン キ ーの 画面 の切 り換 え によ って時系 列画面を表 示 させ ること がで JAMSTECTR 21 ( 1989) 図 4 ト ラ ッ キ ン グチ ャ ートの 刪 列 Fig. 4 Drawn Up tracking contour map 図5 Fig. 5 JAMSTECTR 21 ( 1989) cha! `t of the vehic】 e positions with ド ルフ ィ ン ー3K 監視用プ ログ ラ ムの構成 Construction of the program for the monitor mode 311 オンラインモニタ ー変 更パ ラメ ータ 表5 Table. 5 巨] 「匹 四」 Modificative parameters during executing the on − line monitor 画 面 の 切り 換 え ケ ーブ ル モ ニ ター/ 測 位 の 3 次 元表 示 座 標の 表示 基 準 の 切り 換 え 北 基 準 / 船 箝基 準 表 示 象 限 ( O、 1 、 2 、 3 、 4 ) 匡 三万] X 軸、 Y 軸 の 表 示 角 度 巨匸E 丕 ] 拡 大 / 縮 小 表 示 の 倍 率 [ 穩 終 了 ・ | 時 系 列 デ ータ表 示 三次元測位表示 3 ―dimensional display of the beacon positions 写真4 Photo 4 display of time − series datas オンラインモ ニタ ーの画面 CRT graphic display for on-line monitor き る。 写 真 4に各 画面 の一例 を示す。 図 の画 面 右 Z軸を 深度 方向 に設 定 してい る。 下部 のXY平 面 側部 分 の数値 は ,表 6に示 した数 値 デ ータ の瞬時 は潜航が 予定 さ れてい る最 大深度 の海底 を表して 値を リアル タ イ ムで表 示さ せ た もので あり, 二 つ い る。 ビ ー グル及 び ビ ーコ ンの位置表示 は, それ の画 面 にお いて共 通 の ものであ る。 ぞ れ緑色 と黄色 の仮想点 て表 し, これらの位置関 (a) 測 位 デ ータ の三次元表 示 係 が容易 に把 握で きるように各軸 と各平 面 への投 この画面 の座標軸 は,通常 の北基準 において , 影点 と線 を設 けた。写 真 4の表示 例で は 手前 の海 X軸 の正 側 を東 に,Y 軸の正側を 北 にとり , そし 底 面 に接して い る黄 色 の点 が ビ ーグルを 表 して い て 上部 の XY平 面 におけ る原点 を船 位中心 として る。 さら に,画面 の左上部 には三 次元 座標を 表す 312 JAMSTECTR 21 ( 1989 ) 表6 Table.6 監視 用 モニ タ ー画 面 の表示 データと その シンボル Glossary of symbolics in the data − display シ ン ボ ル デ ー タ の 種 類 BEAR-S 支 援 母 船 の方 位 角 度 単 位 度 BEAR -V ビ ー グル の方 位 角 度 度 X1、Y1 、Zl, SI ビ ー コ ン の 位 置座 標 と スラ ント 距 離 メ ー ト ル X2、Y2, Z2 、S2 ビ ー グル の 位 置座 標 と スラ ント 距 離 〃 V-s.rante ビ ー グル の ス ラン、卜 距 離 〃 Dv(V.dePth ) ビ ー グル の 渊 度計 に よ る深 度 〃 . Lc (C.length) デ ザ ート ヶ 一 プル の 繰 り出し 長 〃 L/S ケー ブ ル 余 長 比(Lc/S2) 無 Hv ビ ー グル の高 度( 海 底 か らの 高 さ ) メ ー トル XY2-XY1 ビ ー グル と ビ ー コ ン 関 の 水平 距 離差 〃 Z2-Z1 〃 の 黷 度差 〃 SL2・SLl 〃 の 実 距 離 差 〃 X.CNT 、Y.CNT ビ ー グル の 流 速 メ ー ト ル / 秒 REV.C ビ ー グル の 回 転数 回 転 COL.TV 、B/W.TV カ ラ ー・ 白黒TV カ メ ラの 俯 仰角 度 度 C・speed テ ザ ー ケ ーブ ル の スピ ード メ ー ト ル / 秒 ため の四つ の描画変更 パラメータ が示 さ れて い る。 ③ ケ ーブ ル の繰り 出し長 こ れら は, 座標 の相対 表示基 準,表 示象 限 ,拡大 ④ ケ ーブルの スピ ード ・縮小率 及 び各 座 標軸 の表 示 角度等 を設 定 する も ⑤ ケ ーブルの余 長比 ので, これらのパ ラメ ータを フ ァン クション キー こ れらの デ ータの その時点 に おけ る瞬時値 は , で 変更 する こと によ って, より理 解し やすい表示 画 面 の右側 に表 示さ れてい る数値 デ ータで 正確 に 状態 を 選択す る こと がで き る。 読 み取 ること がで き る。画 面上部中央 には デ ータ (b) テザ ーケ ーブ ル監 視用 デ ータ の時系 列表 示 この画 面 の グ ラフは,横軸 に経 過時 間を と って 各 デ ータをプ ロ ットさせ る時系 列表 示であ る。 表 示さ れて い る時系列 デ ータは ,以 下 に示 す 5 種類 であ る。 さ れて い る。 オペレ ータ ーは こ れらの時系 列 デ ー タを見 る こと によ って , ビー グルとテ ザ ーケ ーブ ルの状 態を容 易 に監 視する こ とがで き, さら に将 来 の行 動を予 測する こと も可能 とな る。 ① ビ ーグ ルの深度 ② ビ ーグルの スラント距離 JAMSTECTR 21 ( プ ロ ット の開 始時 問 ,現 在の時 間及 び月 日が表 示 1989) (2) オフ ラインモニ タ ー オ フラ インモニ タ ーの機能 と して は,本 追跡 監 313 視 システ ムにお いて , リ アルタ イ ムで実行 さ れる た。 また, 現状 の ビ ーグル操縦 用 コン テナハ ウ ス プ ロ グラ ムを オフ ラインで 実行 す る もので あ る。 内で は, 本 システ ムのハ ード ウェ アを 設 置する ス 先に も述べ たよ う に,本 システ ムの入力 とな るソ ペ ースが 得 られない ため, 支援 母船 「なつ し ま」 ース デ ータ は, 随時 ,フ ロ ッピ ーデ ィ スクに収能 の総 合指令 室 に設置 した。し たが って , ビ ーグル さ れて い る ので ,ド ルフ ィ ン ー3K の オペレ ーシ の追 跡 は,プ ロ ッタ ー上 のト ラッ キン グチ ャート ョ ン終了 後 に おいて も, これら の実 行 結果 が 得ら を 小型 テレ ビカ メ ラで撮影し, 操縦 用 コンテナハ れる。 オ フ ラ インモニタ ーとして の機能 の一例 を ウ ス内 のモニ タ ーテレ ビへ表 示 させて行 っヽ だ。さ 以 下 に示 す。 ら に, ケ ーブ ルの監 視情報 は,その別 室か ら指揮 ① デ ィスク に収納さ れて い るデ ー タの確 認 者 等が船 内電 話等 によ って ビ ーグルの操 縦者 に口 ② 音響 測 位 デ ータの二 次元表 示 答 で伝え た。 写真 6に本 システ ムの設 置状況 を示 ③ 音響 測 位 デ ータ の三次 元表 示 す。 ④ テザ ーケ ーブル監 視用 デ ータの時系 列 表示 ⑤ ビ ーグル行動 軌跡 の三次元 表示(写 真 5) こ れら のプ ロ グ ラムによ る実行 結果 は, グ ラフ ィ ックプ ロ ッタやプ リンタ等へ 出力す るこ と によ って ド ルフ ィン ー3K の運用速報 やデ ータ記 録等 に利 用で き る。 写真6 Photo 6 本 シ ステムの設 置状 況 configuration of the system 6. 開 発 結 果 ビ ーグルの潜 航軌跡 (ト ラン ス ポンダを 原点 として表 示) 実用試 験 の結果, 本 システ ムは, 良好 に動作 す る ことが 確認さ れ実 用 となっ た。 さ らに, その機 能 は ビ ーグルの操縦 をより 安 全且つ効率 的 に行 う 写 真 5 オ フラ イ ンモ ニ タ ーによ るビ ー グル 行動 軌跡 の三 次 元 表 示 Photo 5 3 − dimensional display of the vehicle tracking for off − line monitor 支援 システ ムとして ,たいへ ん有効 であ ることが 確認さ れた。 また,本 システ ムにおけ るパ ーソ ナル コ ンピュ ータを用 い た支 援機能 は,現状 の ビ ーグル の運 用 に 直接必要 な ものだ けを採 用 した。 本 システ ムの 開発 初期 において は, 他 に も幾つ か の有効 な支援 5. 実 用 試 験 1987 年 4月か ら1988 年 8月 の間に, 支援 母船 機能 を検 討 した。 例えば , 「 なつし ま 」によ るドルフ イン ー3K の運用 訓練 ① ビ ーグル 位置 の三次元 表 示と共 に, テ ザーケ が十数回 にわた って行 われた。 その際 ,本 システ ーブル のカ テナ リ ー形状 , ビ ーグル自身 の機 体 ムの実用 試験 が行 われ,ソフ ト ウェア の修正 並 び の動 きや海底 地形図 等 の障害物を も三 次元的 に にハ ードウ ェア等 の追加 ,改造 がそ の都度行 わ れ 表 示で きる機能。 314 JAMSTECTR 21 ( 1989) ② ビ ーグルや マニピ ュ レ ータ の操 縦 ・制 御パ ラ メ ータ等 を直接的 に修正 ,変 更が 行え る機能。 ③ ドルフ ィ ンー3K シ ステ ムにおけ る全計測 デ ータの収集 と適 切 なロ グ情報 の作成。 ④ エキスパ ート システ ム等 に よる ピー クル シス テ ムの故 障診断 と予備品 等 の在庫管 理 機能。 について ,日本 造船学 会 誌, 第704 号,昭和63 年 2月, p. p 28 − 35. 2 ) 服部陸男 :「深海 用 ROV ドルフ ィ ンー3K の概要 」,海洋開発 ニ ュ ース, Vol. 16, Na 5 , 1988 年 9月号 3 ) 三井 造船株式 会 社, 沖電 気工業 株式 会 社 等 が挙 げら れる が,現状 のビ ーグル゛ システ ムの性 :「無 人探 査機 用音響 測 位装 置取扱説 明書 」 能 か ら実現 が不可 能 であ っ たり ,また現状 の運用 及び 「同完成 図 」 状 況 から考え て必 須の もので はない ため, 将来 の 4) Kim M. Gulick: THE PERSONAL ビ ーグル システ ムの支 援 機能とし て採 用す る予定 COMPUTER で あ る。 FOR ROV OPERATIONS −A BENEFICIAL TOOL . Proc. ROY'83 了。 お わ り に (原 稿受理:1988 年11 月 2日) 本 システ ムの開 発 にあた って, 適切 な助言 と実 用試 験 にご協 力を 戴 い た当 センタ ー運 航チ ームの 段 野副指令 と無 人探 査機操 縦班 の諸氏 に謝 意を表 します。 参考 文献 1) 服部陸男 :無人探 査機「 ドルフィ ン ー3K 」 JAMSTECTR 21 ( 1989) 315