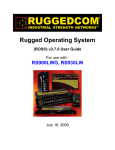
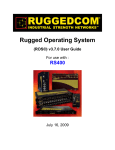
RUGGEDCOM ROS User Guide Chapter 5 Link Aggregation Figure 74: Link Aggregation Menu Section 5.2.1 Configuring Port Trunks Figure 75: Port Trunk Table Configuring Port Trunks 113