1
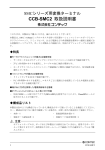
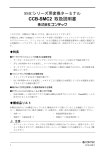
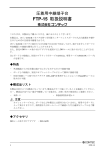
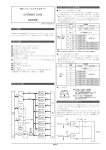
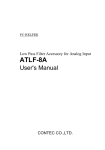
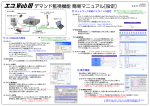
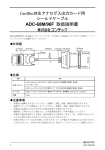
◆システム構成 SMC-2P(PCI) 接続用端子台 SMC-4P(PCI) ステッピングモータ サーボモータ リミットセンサ CCB-SMC1 取扱説明書 ドライバユニット 変換ケーブル CCB-SMC1 PCB-96PS SMC-2P(PCI) ◆商品構成 □本体(CCB-SMC1)…1 □登録カード&保証書…1 □取扱説明書…1 □登録カード返送用封筒…1 SMC-4P(PCI) DC +12V~24V □ Question 用紙…1 直流電源 図 1 シス テム 構成 はじめに ◆CCB-SMC1の接続ケーブル(別売) このたびは、CCB-SMC1をご購入いただきまして、ありがとうございます。 本アクセサリは、SMC-2P(PCI)または SMC-4P(PCI)とモータドライバユニット、リミットセンサおよび電源の ような外部機器を簡単かつ適切に接続するために使用します。外部機器の特性に応じた最適な機能を有してい ますので、配線工数を大幅に削減することが可能です。 ◆特長 このCCB-SMC1には、ボード接続用ケーブルが添付されていません。SMC-2P(PCI)または SMC-4P(PCI) の 仕様を満足する信号延長可能距離は3m以内のため、次のオプションケーブルの中から、用途に応じて適 切なものを購入してください。 ■両端96芯ハーフピッチコネクタ付きシールドケーブル ・PCB96PS-1.5 (1.5m) ・PCB96PS-3 (3m) ・ モータドライバユニットとの接続端子 ・ ・ ・ ・ 本アクセサリにモータドライバユニットを接続するためのコネクタです。 サーボドライバおよびステッピングモータのドライバユニットに接続可能です。 D-SUB37ピンコネクタを採用していますので、加工/制作が簡単です。 モータドライバユニットのコントローラ接続端子に簡単に接続するために 、 信号配置を最適化してい ます 。 ジャンパ ・ ・ モータドライバユニットの入出力回路に応じて配線を最適化するための切り替えジャンパです。 ・ ラインドライバ方式またはオープンコレクタ方式のエンコーダに対応可能です。 ・ モータドライバユニットの入力回路(抵抗)に応じて外部/内部電源を簡単に切り替え可能です。 ・ リミットセンサ ・ 本アクセサリにリミットセンサを接続するための端子です。 ・ 端子ねじ方式を採用していますので、機器の取り付けが簡単/確実に行えます。 ・ 各端子(信号)ごとに電源を有していますので、電源を必要とするセンサにも簡単に接続可能です。 ・ 外部電源 ・ 本アクセサリに電源を供給するための端子です。 ・ 本ボードに電源が投入されているとLEDが発光しますので、電源の入/切の確認が簡単に行えます。 ・ 端子ねじ方式を採用していますので、機器の取り付けが簡単/確実に行えます。 ・ DINレール取り付けアダプタ ・ 別売りのDINレールアダプタ「DIN-ADP1」を使用することによって、35mmDINレールに取り付け可 能です。 仕様 各コネクタの信号配置 表 1 基本 仕様 各コネクタの信号配置は以下のとおりになっています。CN1の信号配置に関してはSMC-2P(PCI)または SMC-4P(PCI)の解説書「インターフェイスコネクタの信号配置」の項を参照してください。 項目 仕様 使用条件 0~50ºC 20~90%(ただし、結露しないこと) 外形寸法(mm) 105.0×230.0×25.5 -方向リミット入力 +方向リミット入力 原点入力 マイナスコモン(グランド) マイナスコモン(グランド) マイナスコモン(グランド) マイナスコモン(グランド) マイナスコモン(グランド) マイナスコモン(グランド) マイナスコモン(グランド) Z相 B相 A相 汎用出力3/カウンタクリア 汎用出力2/アラームクリア 汎用出力1/ホールドオフ 方向/CCW出力 パルス/CW出力 未接続 ボード本体の重量 360g 表 2 イン ターフ ェイス コネ クタ(CN1)の 仕様 96ピンハーフピッチコネクタ[M(雄)タイプ] 使用コネクタ PCR-E96RD 本多通信工業社相当品 96ピンハーフピッチコネクタ[F(雌)タイプ] 適合コネクタ PCR-E96FA 本多通信工業社相当品 表 3 イン ターフ ェイス コネ クタ(CN2~CN5)の仕 様 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 -LIM+ プラスコモン(+12~24V) +LIM+ プラスコモン(+12~24V) ORG+ プラスコモン(+12~24V) IN7+ 汎用入力7 IN6+ 汎用入力6 IN5+ 汎用入力5 IN4+ 汎用入力4/-方向スローダウン入力 IN3+ 汎用入力3/+方向スローダウン入力 IN2+ 汎用入力2/位置決め入力 IN1+ 汎用入力1/アラーム入力 Z+ Z相 + B+ B相 + A+ A相+ OUT3+ プラスコモン(+5~24V) OUT2+ プラスコモン(+5~24V) OUT1+ プラスコモン(+5~24V) DCCW+プラスコモン(+5) PCW+ プラスコモン(+5) ・ボード上のレセプタクルをプラグ側から見たときの配置です。 図 3 CN2~CN5の信号 配置 37ピンD-SUBコネクタ[F(雌)タイプ] 使用コネクタ -LIM+LIMORGIN7IN6IN5IN4IN3IN2IN1ZBAOUT3OUT2OUT1DCCWPCWN.C. 1 2 3 4 5 6 7 8 9 DC-37ST-N 日本航空電子社相当品 ロックナット ネジサイズ #4-40UNC GM-25HU 本多通信工業社相当品 適合コネクタ 37ピンD-SUBコネクタ[M(雄)タイプ] Vcc 1 2 DCSP-JB37PF 日本航空電子工業社製、747306-1 AMP社製など ML-40S1BYF サトーパーツ社相当品 使用端子台 6.2 図 5 CN6~CN9の信 号配置 ドライバユニットとの接続例 Y端子の寸法 [mm] CCB-SMC1とドライバユニットとの具体的な接続例を示します。なお、この例はチャネル0での接続を示し サーボモータ ています。 DC 5.6 14 3.2 端子台の寸法 [mm] CCB-SMC1 11.1 7.62 CCB-SMC1 15.8 端子ネジ : M3 EXTERNAL POWER+ (CN10: 1) DC +12~24V + - EXTERNAL POWER+ (CN10:1) ステッピング モータ EXTERNAL POWER- (CN10:2) オリエンタルモータ社製 モータドライバ ORG SIG α STEP ASシリーズ 230 27 81 81 27 7 +LIM GND (CN6: 6) ORG GND (CN6: 3) -LIM SIG (CN6: 8) +LIM SIG (CN6: 5) -LIM GND (CN6: 9) 91 105 (CN2:29) (CN2:10) (CN2:28) (CN2: 9) (CN2:32) (CN2:13) ALARM+ ALARMEND+ ENDASG+ ASG- B+ B- (CN2:31) (CN2:12) BSG+ BSG- (13) (14) Z+ Z- (CN2:30) (CN2:11) TIM+ TIM- (23) (24) GND (2) C.OFF+ C.OFFACL+ ACLX10+ X10CW+ CWCCW+ CCW- (33) (34) (21) (22) (31) (32) (11) (12) (9) (10) Vcc+5V (1) 7 OUT1+ (CN2:35) OUT1- (CN2:16) OUT2+ (CN2:34) OUT2- (CN2:15) OUT3+ (CN2:33) OUT3- (CN2:14) PCW+ (CN2:37) PCW- (CN2:18) DCCW+ (CN2:36) DCCW- (CN2:17) [mm] 図 2 CCB-SMC1外 形寸 法 ジャンパの設定 ジャンパ番号 設定 +LIM GND (CN6: 6) IN1+ IN1IN2+ IN2A+ A- 安川電機社製 モータドライバ ΣIIシリーズ +LIM SIG (CN6: 5) ORG SIG (CN6: 2) -LIM SIG (CN6: 8) -LIM GND (CN6: 9) 7 7 (CN6: 2) +12~24V + - ORG GND (CN6: 3) EXTERNAL POWER- (CN10: 2) φ3.5 SIG GND -LIM VccにはCN10から供給された+12V~24Vが出力されます。 図 4 CN10の信 号配置 C3A 日本圧着端子社相当品 適合Y端子 SIG GND Vcc +LIM ▼注意 + 外部電源入力端子 表 4 端子 台(CN6~CN10)の 仕様 SIG GND Vcc ORG (25) (26) (29) (30) (15) (16) 図 6 ステ ッピ ングモ ータ用 ドラ イバユ ニット (α STEP ASシリ ーズ)との 接続例 JP1~JP9 2-3間接続 JP37~JP42 1-2間接続 ジャンパの設定 ジャンパ番号 設定 JP1~JP9 1-2間接続 JP39~JP42 1-2間接続 JP37、JP38 2-3間接続 OUT1+ (CN2:35) +LIM- (CN2: 2) -LIM - (CN2: 1) IN1+ (CN2:29) IN1- (CN2:10) IN2+ (CN2:28) IN2- (CN2: 9) IN3+ (CN2:27) IN3- (CN2: 8) IN4+ (CN2:26) IN4- (CN2: 7) IN5+ (CN2:25) IN6+ (CN2:24) IN7+ (CN2:23) +24V P-OT N-OT ALM+ ALMCOIN+ COINS-RDY+ S-RDYTGON+ TGONALO1 ALO2 ALO3 (47) (42) (43) (31) (32) (25) (26) (29) (30) (27) (28) (37) (38) (39) A+ AB+ BZ+ Z- PAO *PAO PBO *PBO PCO *PCO (33) (34) (35) (36) (19) (20) S-ON ALM-RST CLR *CLR PLUS *PLUS SIGN *SIGN (40) (44) (15) (14) (7) (8) (11) (12) (CN2:32) (CN2:13) (CN2:31) (CN2:12) (CN2:30) (CN2:11) OUT1- (CN2:16) OUT2- (CN2:15) OUT3+ (CN2:33) OUT3- (CN2:14) PCW+ (CN2:37) PCW- (CN2:18) DCCW+ (CN2:36) DCCW- (CN2:17) 図 7 サ ーボ モータ 用ドラ イバ ユニッ ト (Σ IIシ リーズ )と の接続 例 ■リミットセンサ取り付け端子(CN6、CN7、CN8、CN9) ■エンコーダ入力ソース切り替えジャンパ(JP1~JP36) 正負方向リミットセンサおよび原点リミットセンサとの接続端子です。 お手持ちのセンサが電源(DC12V~24V)を必要とする場合、Vcc(+側)-GND(-側)間から電源を供給するこ とができます。接続の際に、Vcc(+側)とGND(-側)を短絡しないでください。 モータドライバユニットに搭載されているエンコーダ信号の出力形式には、ラインドライバ方式または オープンコレクタ方式があります。2つの方式では入力回路が異なります。CCB-SMC1では、2つの入力 回路をジャンパで切り替え可能です。ドライバユニットのインターフェイス回路をご確認のうえ、設定 してください。ラインドライバ方式を使用する場合にはジャンパを1-2に、オープンコレクタ方式を使 用する場合にはジャンパを2-3に設定します。なお、各チャネル内の信号のジャンパ設定は全て同じに してください。例として、チャネル0、A相の設定方法を図に示します。 端子番号 チャネル番号 正方向リミット 負方向リミット 原点リミット CH0 CN6 - +LIM CN6 - -LIM CN6 - ORG CH1 CN7 - +LIM CN7 - -LIM CN7 - ORG CH2 CN8 - +LIM CN8 - -LIM CN8 - ORG CH3 CN9 - +LIM CN9 - -LIM CN9 - ORG A CH0 CH1 (接続例) CH2 ・電源を必要としない場合 ・電源を必要とする場合 CCB-SMC1 CH3 CCB-SMC1 +12V~24V Vcc JP 1 JP 2 JP10 JP 3 JP11 JP19 JP12 JP20 JP28 ラインドライバ方式 B JP21 JP29 JP30 JP 4 JP 5 JP13 JP 6 JP14 JP22 JP15 JP23 JP31 オープンコレクタ方式 Z JP24 JP32 JP33 JP 7 JP 8 JP16 JP25 JP34 JP 9 JP17 JP26 JP35 JP18 JP27 JP1 JP1 JP2 JP2 JP3 JP3 1 2 3 JP36 1 2 3 リミットセンサ (接続例) +12V~24V 3kΩ ジャンパ番号 チャネル番号 ・ラインドライバ方式(A、B、Z) リミットセンサ Vcc 3kΩ CCB-SMC1 SIG 外部回路 + SIG 主回路 GND - GND ・オープンコレクタ方式(A、B、Z) 「電圧ソース切り替えジャンパ」の項目を参照してください。 CN6 ■外部電源確認LED CN8 ■DINレール取り付け穴 CH0 別売のDINレール取り付けアダプタ(DIN-ADP1) を使用することによって、CCB-SMC1をDIN レールに取り付けることが可能になります。 CN10に電源が供給されているか確認するため のLEDです。 CH2 CN2 OUT1 OUT2 OUT3 JP37 JP38 JP39 A B Z JP40 JP41 JP42 123 123 123 CN4 JP1~JP36 123 OUT1 OUT2 A B Z OUT3 JP49 JP50 JP51 JP19 JP22 JP25 A B Z JP20 JP23 JP26 JP52 JP53 JP54 JP21 JP24 JP27 123 123 123 123 123 123 OUT1 OUT2 A B Z OUT3 JP43 JP44 JP45 JP10 JP13 JP16 A B Z JP11 JP14 JP17 JP46 JP47 JP48 JP12 JP15 JP18 123 123 123 123 123 123 OUT1 OUT2 A B Z OUT3 JP55 JP56 JP57 JP28 JP31 JP34 A B Z JP29 JP32 JP35 JP58 JP59 JP60 JP30 JP33 JP36 123 123 123 123 123 123 JP37~JP60 CN3 CN5 JP1 JP2 JP3 A 123 JP4 JP5 JP6 B 123 JP7 JP8 JP9 Z 12 3 CN1 CH1 12 3 ■外部電源入力端子(CN10) CN7 CN9 CCB-SMC1に電源を供給するための端子です。 電源電圧には、DC12V~24Vを使用してくださ い。接続の際には、極性をご確認のうえ、+側 と-側を短絡しないように十分ご注意ください。 POWER CH3 CN10 ■SMC-2P(PCI)、SMC-4P(PCI)との接続コネクタ(CN1) ■電圧ソース切り替えジャンパ(JP37~JP60) SMC-2P(PCI)またはSMC-4P(PCI)との接続コネクタです。 ボードとの接続には、PCB-96PSシリーズのケーブルを 使用してください。 汎用出力信号およびエンコーダ入力信号に必要な電源電圧をジャンパで切り替え可能です。ドライバユ ニットのインターフェイス回路をご確認のうえ、設定してください。ジャンパの切り替えにより、内部電 源5V(PC内部の+5V)、または、CN10に入力される外部電源12V~24Vを選択することができます。内部電源 を使用する場合にはジャンパを1-2に設定し、外部電源を使用する場合にはジャンパを2-3に設定します。 例としてチャネル0、OUT1の設定方法を図に示します。 ▼注意 ■モータドライバユニットとの接続コネクタ(CN2、CN3、CN4、CN5) ステッピングモータまたはサーボモータのドライバユニットのコントロール端子に接続するためのコネ クタです。コネクタは、ドライバユニットと簡単に配線するため、最適に配置されています。ドライバ ユニットのコネクタとCCB-SMC1のコネクタを接続する変換ケーブルを作成することにより、配線工数 を削減することができます。 チャネル番号 端子番号 CH0 CN2 CH1 CN3 CH2 CN4 CH3 CN5 ・ 内部電源を使用する場合最大1Aまで供給可能です。 ・ エンコーダ入力信号に外部電源を使用する場合は、別途外挿抵抗(Rで記述)が必要です。 ジャンパ番号 チャネル番号 A B Z CH0 JP37 JP38 JP39 JP40 JP41 JP42 CH1 JP43 JP44 JP45 JP46 JP47 JP48 CH2 JP49 JP50 JP51 JP52 JP53 JP54 CH3 JP55 JP56 JP57 JP58 JP59 JP60 OUT1 OUT2 OUT3 内部電源+5Vを使用 外部電源+12V~24Vを使用 JP37 JP37 1 2 3 1 2 3 (接続例) 1. 汎用出力信号(OUT1、OUT2、OUT3) ・内部電源5Vを使用する場合 JP : 1-2 (接続例) ・パルス出力回路(PCW、DCCW) CCB-SMC1 +5V 外部回路 + CCB-SMC1 +5V R(Ex.220Ω) ・外部電源12V~24Vを使用する場合 JP : 2-3 CCB-SMC1 +12V~24V 外部回路 + SIG+ - SIG- R(Ex.220Ω) 外部回路 + SIG+ - SIG- R(Ex.4.7kΩ) - 2. エンコーダ入力信号(A、B) ・内部電源5Vを使用する場合 JP : 1-2 ・汎用出力回路 ・外部電源12V~24Vを使用する場合 JP : 2-3 12V : R = 370~680Ω、24V : R = 1.1~1.7k Ω 「電圧ソース切り替えジャンパ 」 の項目を参照してください。 ・エンコーダ入力回路 CCB-SMC1 「 エンコーダ入力ソース切り替えジャンパ 」 または、 「電圧ソース切り替えジャンパ 」 の項目を参照して ください。 ・汎用入力回路(IN1~IN7) CCB-SMC1 外部回路 +5V 220Ω CCB-SMC1 +12V~24V 外部回路 220Ω 外部回路 +12V~24V R + + - - 3kΩ * + 3. エンコーダ入力信号(Z) - ・内部電源5Vを使用する場合 JP : 1-2 * IN2のみ1.8kΩ CCB-SMC1 CCB-SMC1 外部回路 +5V ・リミット入力回路(+LIM、-LIM、ORG) 外部回路 ・外部電源12V~24Vを使用する場合 JP : 2-3 12V : R = 670~1280 Ω、24V : R = 2~3.4k Ω 510Ω CCB-SMC1 +12V~24V 外部回路 510Ω R +12~24V 3kΩ + 4.7kΩ + + - - - A-46-120 LZM8771 991026 [990901]