1
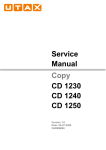
EN OPD EXP STO-SAFE TORQUE OFF USER GUIDE OPD EXP SUMMARY 1 GENERAL DESCRIPTION ..................................................................... 2 2 USE LIMITATIONS ................................................................................. 3 2.1 2.2 2.3 2.4 2.5 CLIMATE CLASS ................................................................................................................. 3 RESISTANCE TO CHEMICALLY ACTIVE SUBSTANCES ................................................. 3 RESISTANCE TO VIBRATIONS .......................................................................................... 4 PROTECTION AND POLLUTION DEGREE ........................................................................ 4 STORAGE ............................................................................................................................ 4 2.5.1 2.5.2 Environmental Storage Conditions ................................................................................... 4 Recovery Procedure After Storage................................................................................... 4 3 ADJUSTMENT AND DRIVERs SUPPLY ................................................ 5 3.1 3.2 TERMINAL BOARD DESCRIPTION .................................................................................... 5 TERMINAL BOARD POSITIONS ......................................................................................... 7 4 EXTERNAL CONNECTIONS ................................................................. 9 5 DESCRIPTION OF STO OPERATION ON OPEN DRIVE.................... 10 5.1 5.2 ENABLING THE STO SYSTEM ......................................................................................... 10 DISABLING THE STO SYSTEM ........................................................................................ 11 6 DIAGNOSTIC SYSTEM ........................................................................ 12 6.1 6.2 BASIC DIAGNOSTIC ......................................................................................................... 12 INTELLIGENT DIAGNOSTIC ............................................................................................. 12 6.2.1 FB1 AND FB2 CONTROL .................................................................................................. 12 6.2.2 “NOT DANGEROUS FAILURE” LOGICAL OUTPUT CONTROL ...................................... 14 7 APPLICATION EXAMPLES .................................................................. 15 8 TECHNICAL DATA ............................................................................... 18 KEY TO SYMBOLS Caution Danger STO (Safe Torque Off) Rev. 1.3 – 30.11.11 - EN 1 OPD EXP 1 GENERAL DESCRIPTION The OPEN DRIVE converter implements the Safe Torque Off (STO) system to prevent unexpected starting according to the EN 61800-5-2 standards. This system prevents the creation of a rotating magnetic field by disconnecting the control voltage from the power semiconductors. Thanks to these systems, it will be possible to conduct short operations such as cleaning and/or maintenance work on the non-electrical parts of the machine without disconnecting either the drive power supply or the connection between power and engine. The STO system, therefore, will be managed by components with limited power which means that the cost of the elements used in the switchboards will be reduced. The STO system is implemented using two redundant channels, each of which has its own feedback signal accessible from the outside. The operating diagram is as follows: The input to channel 1 is +24VDR and its feedback signal is STO_FB1. The input to channel 2 is STO_2 and its feedback is STO_FB2. Each of the feedbacks refers to a clean N.C. contact which can be read by an external logic managing the STO system at machine level. 2 STO (Safe Torque Off) Rev. 1.3 – 30.11.11 - EN OPD EXP 2 USE LIMITATIONS The environmental constraints of the OPEN DRIVE converter are listed in a section of the installation manual and refer to its normal operation. The following paragraphs serve to clarify the use limitations of the converter with a view to making sure that its correct operation continues also when the STO system has been activated. 2.1 CLIMATE CLASS Class 3K3 according to EN 60721-3-3 Environmental parameter Limits working temperature (1) humidity atmospheric pressure maximum surrounding air movement maximum temperature gradient maximum thermal irradiation condensation precipitation with wind water other than rain ice formation 0÷40 5÷85 70÷106 (2) 1 0.5 700 NO NO (3) NO NO Unit of measuremen t °C % kPa m/s °C/min W/m2 (1) The climate class 3K3 includes a 5÷40°C use limitation, but the converter can work also if the environmental temperature is 0°C. The maximum operating temperature of the converter reaches 45°C. In this case, declass the rated power to 88%. (2) The atmospheric pressure limitations correspond to a 0÷3000m a.s.l. operating range. In actual fact, above 1000m it will be necessary to declass the rated power of the converter by 1% every 100m. (3) The converter must be installed in a switchboard and not outside. 2.2 RESISTANCE TO CHEMICALLY ACTIVE SUBSTANCES Class 3C1R according to EN 60721-3-3 Environmental parameter sea salts sulphur dioxide hydrogen sulphide chlorine hydrochloric acid hydrofluoric acid ammonia ozone nitrogen oxide STO (Safe Torque Off) Rev. 1.3 – 30.11.11 - EN Maximum value NO 0,01 0,0037 0,0015 0,001 0,001 0,00034 0,001 0,00066 0,001 0,0012 0,03 0,042 0,004 0,002 0,01 0,005 Unit of measurement 3 mg/m 3 cm /m3 mg/m3 cm3/m3 mg/m3 cm3/m3 mg/m3 cm3/m3 mg/m3 cm3/m3 mg/m3 cm3/m3 mg/m3 cm3/m3 mg/m3 cm3/m3 3 OPD EXP 2.3 RESISTANCE TO VIBRATIONS As regards vibrations, the OPEN DRIVE has the following use limitations: 10Hz ≤ frequency ≤ 57Hz 57Hz ≤ frequency ≤ 150Hz 0.075 1 mm (width) g In the event of vibrations exceeding the limits indicated above, suitable reduction measures will have to be adopted. 2.4 PROTECTION AND POLLUTION DEGREE IP20 2 (1) Protection degree Pollution degree (1) Non-conductive pollution and – occasionally and temporarily – conductive pollution generated by condensation. 2.5 STORAGE 2.5.1 Environmental Storage Conditions temperature humidity condensation -10÷60 5÷95 NO °C % 2.5.2 Recovery Procedure After Storage The converter cannot be used immediately after a storage period. To avoid converter failures, use the following recovery procedure. PHASE 1: Non-powered converter temperature 15÷35 °C humidity 5÷75 % condensation NO Atmospheric pressure 86÷106 kPa Recovery time (1) 1 h (1) After this recovery time, there must be no trace of condensation inside or outside the operation (well—aired environment). PHASE 2: For long storage periods (one or more months) regenerate the electrolytic condensers of the power bus. Feed the converter from the terminal boards L1, L2 and L3 for 30min-1 hour without letting it run. Once the regeneration process has been completed, the converter can work normally. 4 STO (Safe Torque Off) Rev. 1.3 – 30.11.11 - EN OPD EXP 3 ADJUSTMENT AND DRIVERS SUPPLY 3.1 TERMINAL BOARD DESCRIPTION The following tables list the terminal boards used to feed the OPEN DRIVE cards and to perform the diagnostic work on the STO system. X3 Pin Name 1 +24V 2 0P Adjustment card feeding Description +24V (22V÷26V) min. 600mA (OPD3-7-12-15A), min. 800mA (OPD22A), min. 1A (OPD32-40-48-60A) The terminal boards X3-1 and X3-2 power the adjustment card, the sensor in the motor and the cooling fans of the radiator. The power sizes 70A-150A generate inside them the +24V from the main supply. Then, on terminal X3 is available a +24V that can used by the customer only for: a) b) Provide the converter breakouts Power the two STO function channels (the power must be interrupted by appropriate safety contacts). In the power size 70A-150A is also possible to feed the regulation board with an external +24V using the terminal X3: the internal generated voltage and external provided voltage will not be in conflict, but will be used the source with the higher voltage. This allows to: a) b) Set the driver without feeding the power side Keep alight the regulation part even if there isn’t the power supply. The current absorbed by the drivers on the +24V terminal for the different sizes are the follows: OPDE 3-7-12-15A min. 600mA OPDE 22A min. 800mA OPDE 32-40-48-60A min. 1A OPDE 70÷150A min. 500mA N.B. the pinout of X3 change in function of the drive size STO (Safe Torque Off) Rev. 1.3 – 30.11.11 - EN 5 OPD EXP S1 Pin Name 0P_DR 10 6 Description +24V (22V÷26V) min. 200mA Powering voltage for the first of the two STO safety system channels. This channel powers the IGBT power drivers. When the drive is working normally, the +24V_DR driver must be provided. On the other hand, to enable the STO system, it is necessary to disconnect +24V_DR. 9 +24V_DR 8 STO_FB1_B Clean N.C. contact max. 60Vdc max. 0.5A 7 STO_FB1_A Monitor of the first STO system channel which indicates whether the IGBT drivers are powered or not. When the terminal board1 is powered, the contact is open.. 6 N.C. 5 0P_STO_2 4 STO_2 3 N.C. 2 STO_FB2_B 1 STO_FB2_A No connect +24V (22V÷26V) min. 40mA Power voltage for the second of the two STO safety system channels. This channel powers the relay which disconnects the IGBT driver controls. When the drive is working normally the STO_2 must be powered. On the contrary, to enable to STO system, it is necessary to disconnect STO_2. No connect Clean N.C. contact max. 60Vdc max. 0.5A Monitor of the second STO system channel which indicates whether the relay which disconnect the IGBT drivers are powered or not. When the terminal board is powered, the contact is open STO (Safe Torque Off) Rev. 1.3 – 30.11.11 - EN OPD EXP 3.2 TERMINAL BOARD POSITIONS The X3 and S1 terminal boards are placed on the same side as the converter as shown in the figures below OPD SIZE. S OPD SIZE. L STO (Safe Torque Off) Rev. 1.3 – 30.11.11 - EN OPD SIZE. M OPD SIZE. X 7 OPD EXP CASE 1-2-3 8 STO (Safe Torque Off) Rev. 1.3 – 30.11.11 - EN OPD EXP 4 EXTERNAL CONNECTIONS The following paragraphs provide indications about the OPEN DRIVE connection only as regards the feeding of the adjustment card and STO safety system. For the remaining connections, please refer to the OPD installation handbook. As indicated in par. 3.1, the terminal board X3 can be powered by the adjustment card (+24V). On the other hand, the terminal board S1, power the pilot drivers of the power IGBT and the relay which carries the controls of the adjustment card to the drivers. The signals +24V_DR (referring to 0P_DR) and STO_2 (referring to 0P_STO_2) each relate to one channel of the STO safety system. For this reason it is particularly important to pay great attention when cabling these signals from the OPEN DRIVE to the safety module used on the switchboard. a) For the X3 connection use a screened two-way cable whose strap must be connected to the 0P signal. Normally a screened cable is not required for adjustment powering. A screened cable is chosen to make sure that, in the event of failure of the powering cables, the safety system is disconnected. The reason is that: the terminal board X3 is close to the terminal board S1; the powering cables for X3 and those for S1 will reach the converter inside the same conduit. b) For the first channel connection (+24V_DR e 0P_DR) use a screened two-way cable whose strap must be connected to the 0P_DR signal. A screened cable with the strap connected to 0P_DR serves to avoid disconnecting the safety system in the event of failure of the cables outside the converter. An example of this is the loss of insulation and subsequent accidental contact between one of the cables connected to 24V on the switchboard and +24V_DR. c) For the second channel connection (STO_2 e 0P_STO_2) use a screened two-way cable whose strap must be connected to the 0P_STO_2 signal. A screened cable with the strap connected to the 0P_STO_2 serves to avoid disconnecting the safety system in the event of failure of the cables outside the converter. An example of this is the loss of insulation and subsequent accidental contact between one of the cables connected to 24V on the switchboard and the STO_2 signal. d) For the tow monitor connection, the type of cable to be used depends on how the diagnostic test on the safety chain is conducted. Some safety modules do not specify the type of cable to connect the signals used by the diagnostic system. The reason for this is that they are able to determine themselves whether there is a failure in these connections. If the diagnostic test on the safety channels is conducted directly by the manufacturer of the switchboard, it is necessary to determine whether this test is able to detect a failure in the connection cables. In the diagnostic test, failure of the monitor signal cables causes the test itself to fail. It is not possible to determine where the failure is: on the safety chain or on the monitor. The use of screened twoway cable for each of the two monitor, therefore, makes it at least possible to rule out a failure of the monitor signal connections STO (Safe Torque Off) Rev. 1.3 – 30.11.11 - EN 9 OPD EXP 5 DESCRIPTION OF STO OPERATION ON OPEN DRIVE 5.1 ENABLING THE STO SYSTEM If the converter is working normally, that is to say the STO system is disabled, it is necessary to power the +24V of the adjustment (X3), as well as +24VDR and STO_2. In this situation the clean monitor contacts (STO_FB1 and STO_FB2) will both have to be open. To enable the safety system follow this procedure: a) stop the motor (1) (2) b) disconnect operation c) disconnect +24V_DR (3) (3) d) disconnect STO_2 (1) it is possible to carry out operations a) and b) only by disconnecting operation if the converter settings include “stop at minimum speed” (C28=1). In this case the converter brings the motor to the minimum speed (set to zero through the parameter P50) then disconnects operation. (2) in the presence of external influences (for example falling suspended loads), it might be necessary to take extra precautions (for example mechanical brakes) to prevent any risk. (3) the sequence followed for items c) and d) is not relevant: for example the signals STO_2 and +24V_DR can also be temporarily disconnected. CAUTION: enabling the STO system while the machine is running causes total loss of motor control. Enable the STO system only after its operation has been stopped following the procedure described above. DANGER: the terminal boards +, -, U, V, W, F remain live. No maintenance work must be conducted and electrical component must not be touched. CAUTION: after power has been disconnected, both channels take time to return to a safe condition. The times are indicated below. CHANNEL 1 CHANNEL 2 Maximum time after +24V_DR has been disconnected Maximum time after STO_2 has been disconnected 1s 20ms DANGER: on brushless motors with permanent magnets, in the event of simultaneous failure of the two power switches, motor movement is possible up to 180° electrical equal to [180/n° polar motor couples] mechanical degrees. In this situation the feedback contacts (STO_FB1 and STO_FB2) will both have to be closed. Any discrepancy in only one of the monitor contacts compared to the converter status indicate a failure. In this case the safety system might not work correctly and needs to be immediately repaired. Apart from the feedback contacts available outside, inside the OPEN DRIVE there is a feedback signal (only for channel 1) used by the adjustment card to manage this situation. When the connection “enable safety stop only as signal” is disabled (C73=0 which is the default configuration), the converter indicates this status with the alarm presence A13 con d49=1. In this situation the logic output o17 “power electronic card not supplied” switches to high, the logic output o0 to low (the drive ready is disconnected) and the power insertion control is disconnected. With the C73=1 connection, the converter still brings to a high level the logic output o17 “power electronic card not powered”, the power insertion control is disconnected but no specific alarm is generated and the logic output o0 “Drive ready” remains on high, that is to say the drive ready remains active (if no other alarms are present). 10 STO (Safe Torque Off) Rev. 1.3 – 30.11.11 - EN OPD EXP 5.2 DISABLING THE STO SYSTEM To disable the STO system it is sufficient to power again +24V_DR and STO_2. Also in this case the sequence followed is not relevant. CAUTION: From the moment the machine is powered, it takes time to disable the safety systems on both channels. The times are indicated below CHANNEL 1 CHANNEL 2 Maximum time after the enabling of +24V_DR Maximum time after the enabling of STO_2 100ms 20ms OPDE 03÷60A (4) 1.1s OPDE 70÷150A (4) In the case of OPDE 70÷150A drivers with supply of the AC power side, for wich the customer has required a precharge time of the power side higher than that standard, the maximum out time of safe function passes to: OutSTO_maximum_time= 600ms+Riquired_precharge_time In the standard configuration the precharge time is 500ms. In this situation the feedback contacts (STO_FB1 ed STO_FB2) will both need to be open. Any discrepancy in only one of the monitor contacts with respect to the converter status means that there is a failure. In this case the safety system might not be working properly and it needs to be repaired immediately. In the case of the adjustment card, to return to the normal operation conditions it is necessary to do the following. C73=0 Wait at least 100ms after introducing +24V_DR, then enable the alarm reset. In this condition the o17 logic output “power electronic card not powered” reaches a low level. The o0 logic output “Drive ready” is on high which means that the converter is ready to work. C73=1 The converter behaves in the same way as with C73=0 except that it is not necessary to enable the alarm reset. ATTENTION: If the run command is given before the maximum time of out by STO function indicated in Tab. 2, the driver shows the alarm A12 with d49=1 “run without precharge”. STO (Safe Torque Off) Rev. 1.3 – 30.11.11 - EN 11 OPD EXP 6 DIAGNOSTIC SYSTEM When the safe function is active, the feedback signals indicate if the safe function has been executed correctly . it is necessary to control these feedback signals, with the aim to distinguish between: Basic diagnostic (compulsory); Intelligent diagnostic (optional). 6.1 BASIC DIAGNOSTIC The basic diagnostic is compulsory, then it has to be always executed, because it represents a basic control for the correct working of STO function. To satisfy the basic diagnostic is necessary that: a) The feedback signals and the digital output o23-“Not Dangerous Failure” are monitored at every machine start, on which is mounted the drive. The machine start will be executed if the feedback contacts STO_FB1 are STO_FB2 are both closed (feedback signals both “active”) and if the output o23-“Not Dangerous Failure” is high; b) The reset command, which brings out the machine from the state of “emergency stop”, is enabled if during the state of emergency stop, the feedback contacts are both closed and the digital output o23-“Not Dangerous Failure” is high. See paragraph 7, for some examples of connections that satisfy these prescriptions. 6.2 INTELLIGENT DIAGNOSTIC The intelligent diagnostic is optional and can be used if the STO function is controlled by a PLC or by an other intelligent system. It consists to perform periodically: a) Two test sequences, one for each of the two channels, which allow to detect any failure of the safety function before it is turned on (will be discussed later in FB1 and FB2 control); b) A control of the logic output state o23- “Not Dangerous Failure (will be discussed later in “Not Dangerous Failure” output logic control). Below are described in detail the two controls. 6.2.1 FB1 AND FB2 CONTROL Looking at the congruence between the feedback signals and the presence or absence of the control voltage in input to the two channels of the STO, it’s possible run the control sequences that allow you to detect some faults on safety channels. CAUTION: The control sequences of the two safety channels must be performed one at a time and not simultaneously. The maximum time of entry and exit safe condition are shown in the following table. These figures refer to the maximum time between the change in status, channel switching and security of its monitor CHANNEL 1 Maximum time between the +24V_DR interruption and STO_FB1 commutation Maximum time between the +24V_DR insertion and the STO_FB1 commutation Tab.3 CHANNEL 2 Maximum time between the STO_2 interruption and STO_FB2 commutation Maximum time between STO_2 insertion and STO_FB2 commutation 1s 100ms 100ms 20ms OPDE 03÷60A100ms OPDE 70÷460A Tab.4 12 STO (Safe Torque Off) Rev. 1.3 – 30.11.11 - EN OPD EXP The sequence to be performed for channel 1 is represented by the following flow chart: ATTENTION: For the OPDE 70÷150A sizes, the diagnostic function of channel 1 must be done with the second safety channel in OFF (+24V present on input STO_2). For OPDE 03÷60A sizes, instead, the state of the second channel of the safety function is not relevant. FB1 control Flow-chart The sequence to be performed for channel 2 is represented by the following flow chart: ATTENTION: The state of the first channel of the safety function is irrelevant to the diagnostic test of the second channel STO. STO (Safe Torque Off) Rev. 1.3 – 30.11.11 - EN 13 OPD EXP Flow-chart FB2 control If the diagnostic test detects a fault, the converter must be subjected to immediate repair, worth a possible malfunction of the safety function in the subsequent request for intervention. We recommend running these tests periodically in situations standstill. In any case it is required that you also meet at least the basic requirements of diagnostics, namely a) and b) previously described in section 6.1. 6.2.2 “NOT DANGEROUS FAILURE” LOGICAL OUTPUT CONTROL The output control logic o23-"Not Dangerous Failure" allows to verify the presence of some dangerous faults. To make the control is necessary to check that the logical output o23 is to a high logical level keeping energized the channels 1 and 2. See paragraph 7 for some examples that show how to connect the control output of this logic. 14 STO (Safe Torque Off) Rev. 1.3 – 30.11.11 - EN OPD EXP 7 APPLICATION EXAMPLES The following are some application examples of the STO system. In the various examples the OPD connector is linked to a safety module; regardless of the type of connection used, the safety module must be set in order to have a controlled manual start and not an automatic start. Moreover the feedback contacts must be connected in series to the reset button. In this way the machine is started, and therefore operated, with the safety module on and it will be mandatory to press the reset button to enable its starting. This is necessary in order to conduct, when the machine is started, a test on the feedback signals. For the proper use of feedback related to the digital-o23 “Not Dangerous Failure” o23 must be configurated as an output physical logic associated with one of four logic outputs available. In order it’s possible use the direct contact present in the clean logic output LO2 and LO4. In this case it’s necessary configure the physical digital output with the direct logical output o23. Alternatively, you can connect to each of the digital output, an external relay, with its contact placed in series with the reset button. In this case, if the contact of the relay is n.c. then it’s necessary configure the physical digital output with the denied logical output o23; But if the relay contact is n.o. it’s necessary configure the digital output with direct logical output o23. Example 1 illustrates the use of a Pilz PNOZ XV2 safety module which includes two relays each of which has two immediate contacts and two timed contacts that are triggered after an adjustable delay. One of the activated systems in the converter is “stop with minimum speed” (the connection C28=1 needs to be set). If the emergency button is pressed, the start consent control is immediately disconnected from the converter causing its controlled stop. The PLC is informed that the emergency button has been pressed through the connection to its digital input. After a given delay, also the timed contacts of the Pilz module are opened which enable the two channels of the STO system, only when the motor has already been stopped. The delay time must be longer than the controlled stop time. The feedback contacts of the STO systems are connected in series to the reset button which makes it possible to leave the emergency stop condition. Therefore, resetting is enabled only if the feedback contacts are closed at the same time as the STO system is enabled. If this does not happen, it means that there a failure has occurred in the converter and the feedback contact will remain open. This makes it possible to check the feedbacks of the STO system every time the machine is reset. Warning: this example works correctly with the connection C73=0. To be able to go running, it’s necessary provide a reset pulse alarm on terminal M1 on pin 1 (e.g. PLC). To exit by safe condition, once you restore the security module, it’s necessary wait for the time indicated in Table 2 and then provide the pulse for alarm reset. STO (Safe Torque Off) Rev. 1.3 – 30.11.11 - EN 15 OPD EXP Example 1 Example 2 is a diagram where the operation is started by a field bus and therefore it is the PLC itself which, having read the “emergency” signal, controls the converter to activate the motor stop procedure. As is example 1, also in this case, the STO system is activated by the timed contacts of the Pilz module. WARNING: If the connection C73 = 0, to be able to go on run is necessary that the PLC provides a command to reset alarms. To exit safe condition, once you restore the security module, you must wait for the time indicated in Tab. 2, reset the alarm and then provide the run command SW (C21 = 1). In case C73 = 1, the sequence to follow is the same as that for C73 = 0, but it is not necessary for the PLC provides a command of reset alarms. Example 3 shows an application where the PLC is able to read both the status of the incoming STO signals and the feedback signals. This means that it is possible to conduct a regular check on the PLC which compares the incoming status with the feedback status. If the PLC notices a discrepancy, it means there is a failure which will be reported. 16 STO (Safe Torque Off) Rev. 1.3 – 30.11.11 - EN OPD EXP Example 2 Example 3 STO (Safe Torque Off) Rev. 1.3 – 30.11.11 - EN 17 OPD EXP 8 TECHNICAL DATA The technical data change with the power sizes, because the used components change in the safety channel. EN 61800-5-2 OPDE 03÷60 A SIL 2 PFH 8,4·10-8 h-1 Hardware Fault Tolerance 1 Lifetime 10 anni OPDE 70÷150 A 2 2,8·10-8 h-1 1 10 anni EN ISO 13849-1 OPDE 03÷60 A d 3 39,6 anni OPDE 70÷150 A d 3 342,7 anni PL Categoria MTTFd 18 STO (Safe Torque Off) Rev. 1.3 – 30.11.11 - EN OPD EXP STO (Safe Torque Off) Rev. 1.3 – 30.11.11 - EN 19 OPD EXP 20 STO (Safe Torque Off) Rev. 1.3 – 30.11.11 - EN