1
Goodrive300 inverters
Preface
Preface
Thanks for choosing our products.
Goodrive300 series inverters are high performance open loop vector inverters for controlling
asynchronous AC induction motors and permanent magnet synchronous motors. Applying
the most advanced non-velocity sensor vector control technology which keeps pace with the
leading international technology and DSP control system, our products enhances its
reliability to meet the adaptability to the environment, customized and industrialized design
with more optimized functions, more flexible application and more stable performance.
The control performance of Goodrive300 series inverters is as outstanding as that of the
leading sophisticated inverters on worldwide market. Goodrive300 series inverters integrate
the drive of asynchronous motors and synchronous motors, torque control and speed control,
meeting the high performance requirement of the customer applications and stepping on the
unique incorporated inverters with superexcellent control functions in this circle.
Simultaneously, comparing with the other kinds, Goodrive300 series inverters can adapt to
worse grid, temperature, humidity and dust with a better performance of anti-tripping and
improved the reliability.
Goodrive300 series inverters apply modularized design to meet the specific demand of
customers, as well as the demand of the whole industry flexibly and follow the trend of
industrial application to the inverters on the premise of meeting general need of the market.
Powerful speed control, torque control, simple PLC, flexible input/output terminals, pulse
frequency given, traverse control can realize various complicate high-accuracy drives and
provide integrative solution for the manufacturers of industrial devices, which contributes a
lot to the cost reducing and improves reliability.
Goodrive300 series inverters can meet the demand of environmental protection which
focuses on low noise and weakening electromagnetic interference in the application sites for
the customers.
This manual provides installation and configuration, parameters setting, fault diagnoses and
daily maintenance and relative precautions to customers. Please read this manual carefully
before the installation to ensure a proper installation and operation and high performance of
Goodrive300 series inverters.
If the product is ultimately used for military affairs or manufacture of weapon, it will be listed
on the export control formulated by Foreign Trade Law of the People's Republic of China.
Rigorous review and necessary export formalities are needed when exported.
Our company reserves the right to update the information of our products.
1
Goodrive300 inverters
Content
Content
Preface .............................................................................................................................. 1
Content .............................................................................................................................. 2
Safety Precautions
1 ..................................................................... 6
1.1 What this chapter contains .................................................................................. 6
1.2 Safety definition .................................................................................................. 6
1.3 Warning symbols ................................................................................................ 6
1.4 Safety guidelines ................................................................................................ 7
Quick Start-up
2........................................................11
2.1 What this chapter contains .................................................................................11
2.2 Unpacking inspection.........................................................................................11
2.3 Application confirmation .....................................................................................11
2.4 Environment ......................................................................................................12
2.5 Installation confirmation .....................................................................................12
2.6 Basic commission ..............................................................................................13
Product Overview
3 ..................................................................14
3.1 What this chapter contains .................................................................................14
3.2 Basic principles..................................................................................................14
3.3 Product specification..........................................................................................15
3.4 Nameplate .........................................................................................................17
3.5 Type designation key .........................................................................................17
3.6 Rated specifications...........................................................................................18
3.7 Structure diagram ..............................................................................................19
Installation Guidelines
4........................................................................22
4.1 What this chapter contains .................................................................................22
4.2 Mechanical installation .......................................................................................22
4.3 Standard wiring ..................................................................................................28
4.4 Layout protection ...............................................................................................38
Keypad Operation Procedure
5 ..............................................................................40
5.1 What this chapter contains .................................................................................40
5.2 Keypad ..............................................................................................................40
2
Goodrive300 inverters
Content
5.3 Keypad displaying..............................................................................................43
5.4 Keypad operation...............................................................................................44
Function Parameters
6.................................................................47
6.1 What this chapter contains .................................................................................47
6.2 Goodrive300 general series function parameters................................................47
Basic Operation Instruction
7 ...................................................................141
7.1 What this chapter contains ...............................................................................141
7.2 First powering on .............................................................................................141
7.3 Vector control...................................................................................................146
7.4 V/F control .......................................................................................................151
7.5 Torque control..................................................................................................157
7.6 Parmeters of the motor ....................................................................................162
7.7 Start-up and stop control ..................................................................................167
7.8 Frequency setting ............................................................................................172
7.9 Analog input.....................................................................................................178
7.10 Analog output.................................................................................................180
7.11 Digital input ....................................................................................................183
7.12 Digital input....................................................................................................192
7.13 Simple PLC....................................................................................................195
7.14 Multi-stage speed running ..............................................................................198
7.15 PID control.....................................................................................................200
7.16 Traverse running............................................................................................204
7.17 Pulse counter.................................................................................................206
7.18 Fixed-length control .......................................................................................208
7.19 Fault procedure..............................................................................................209
Fault tracking
8 ............................................................213
8.1 What this chapter contains ...............................................................................213
8.2 Alarm and fault indications ...............................................................................213
8.3 How to reset ....................................................................................................213
8.4 Fault history .....................................................................................................213
8.5 Fault instruction and solution............................................................................213
3
Goodrive300 inverters
Content
8.6 Common fault analysis.....................................................................................219
8.6.1 The motor does not work...............................................................................219
8.6.2 Motor vibration ..............................................................................................220
8.6.3 Overvoltage ..................................................................................................221
8.6.4 Undervoltage fault.........................................................................................221
8.6.5 Abnormal heating of the motor ......................................................................222
8.6.6 Overheat of the inverter ................................................................................223
8.6.7 Speed loss during the acceleration of the motor ............................................223
8.6.8 Overcurrent...................................................................................................224
Maintenance and hardware diagnostics
9...............................................................225
9.1 What this chapter contains. ..............................................................................225
9.2 Maintenance intervals ......................................................................................225
9.3 Cooling fan ......................................................................................................229
9.4 Capacitors .......................................................................................................229
9.5 Power cable.....................................................................................................231
Communication protocol
10 .......................................................................232
10.1 What this chapter contains .............................................................................232
10.2 Brief instruction to Modbus protocol ...............................................................232
10.3 Application of the inverter ...............................................................................233
10.4 RTU command code and communication data illustration...............................239
Common communication fault................................................................................252
Extension card
Appendix A ...................................................253
A.1 What this chapter contains...............................................................................253
A.2 Profibus extension card ...................................................................................253
Technical data
Appendix B ..................................................272
B.1 What this chapter contains...............................................................................272
B.2 Ratings............................................................................................................272
B.3 Electric power network specification ................................................................273
B.4 Motor connection data .....................................................................................274
B.5 Applicable standards .......................................................................................274
B.6 EMC regulations..............................................................................................275
4
Goodrive300 inverters
Dimension drawings
Content
Appendix C ...................................................277
C.1 What this chapter contains ..............................................................................277
C.2 Keypad structure .............................................................................................277
C.3 Inverter chart...................................................................................................278
C.4 Inverter chart...................................................................................................278
Peripherial options and parts
Appendix D ....................................................283
D.1 What this chapter contains What this chapter contain ......................................283
D.2 Peripherial wiring.............................................................................................283
D.3 Power supply ..................................................................................................284
D.4 Cables ............................................................................................................285
D.5 Breaker and electromagnetic contactor............................................................288
D.6 Reactors .........................................................................................................290
D.7 Filter ...............................................................................................................291
D.8 Braking system ...............................................................................................294
Further information
Appendix E ....................................................298
5
Goodrive300 inverters
Safety precautions
Safety Precautions
1
1.1 What this chapter contains
Please read this manual carefully and follow all safety precautions before moving, installing,
operating and servicing the inverter. If ignored, physical injury or death may occur, or
damage may occur to the devices.
If any physical injury or death or damage to the devices occurs for ignoring to the safety
precautions in the manual, our company will not be responsible for any damages and we are
not legally bound in any manner.
1.2 Safety definition
Danger:
Serious physical injury or even death may occur if not follow
relevent requirements
Warning:
Physical injury or damage to the devices may occur if not follow
relevent requirements
Note:
Physical hurt may occur if not follow relevent requirements
Qualified
People working on the device should take part in professional
electricians:
electrical and safety training, receive the certification and be
familiar
with
all
steps
and
requirements
of
installing,
commissioning, operating and maintaining the device to avoid any
emergency.
1.3 Warning symbols
Warnings caution you about conditions which can result in serious injury or death and/or
damage to the equipment, and advice on how to avoid the danger. Following warning
symbols are used in this manual:
Symbols
Name
Electrical
Danger
Danger
Serious physical injury or even
death may occur if not follow the
relative requirements
General
Warning
Instruction
danger
Physical injury or damage to the
devices may occur if not follow the
relative requirements
6
Abbreviation
Goodrive300 inverters
Safety precautions
Symbols
Name
Electrostatic
Do not
discharge
Instruction
Abbreviation
Damage to the PCBA board may
occur if not follow the relative
requirements
Sides of the device may become
Hot sides
Hot sides
Note
Note
hot. Do not touch.
Physical hurt may occur if not follow
Note
the relative requirements
1.4 Safety guidelines
Only qualified electricians are allowed to operate on the inverter.
Do not carry out any wiring and inspection or changing components when the
power supply is applied. Ensure all input power supply is disconnected
before wiring and checking and always wait for at least the time designated
on the inverter or until the DC bus voltage is less than 36V. Below is the table
of the waiting time:
Inverter module
Minimum waiting time
400V
1.5kW-110kW
5 minutes
400V
132 kW -315 kW
15 minutes
400V
above 350 kW
25 minutes
Do not refit the inverter unauthorizedly; otherwise fire, electric shock or other
injury may occur.
The base of the radiator may become hot during running. Do not touch to
avoid hurt.
The electrical parts and components inside the inverter are electrostatic. Take
measurements to avoid electrostatic discharge during relevent operation.
1.4.1 Delivery and installation
Please install the inverter on fire-retardant material and keep the inverter
away from combustible materials.
Connect the braking optional parts (braking resistors, braking units or
feedback units) according to the wiring diagram.
Do not operate on the inverter if there is any damage or components loss to
7
Goodrive300 inverters
Safety precautions
the inverter.
Do not touch the inverter with wet items or body, otherwise electric shock
may occur.
Note:
Select appropriate moving and installing tools to ensure a safe and normal running of
the inverter and avoid physical injury or death. For physical safety, the erector should
take some mechanical protective measurements, such as wearing exposure shoes
and working uniforms.
Ensure to avoid physical shock or vibration during delivery and installation.
Do not carry the inverter by its cover. The cover may fall off.
Install away from children and other public places.
The inverter cannot meet the requirements of low voltage protection in IEC61800-5-1
if the sea level of installation site is above 2000m.
Please use the inverter on appropriate condition (See chapter Installation
Environment).
Don't allow screws, cables and other conductive items to fall inside the inverter.
The leakage current of the inverter may be above 3.5mA during operation. HIGH
LEAKAGE CURRENT, EARTH CONNECTION ESSENTIAL BEFORE CONNECTING
SUPPLY. Ground with proper techniques and ensure the grounding resistor is less
than 10Ω. The conductivity of PE grounding conductor is the same as that of the
phase conductor (with the same cross sectional area).
Grounding conductors minimum cross-sectional area of at least 10mm 2, or the
corresponding data in the table below, the maximum being asked to choose between
the two cross-sectional area as the grounding conductor:
Power line conductor cross-sectional area
Grounding conductor cross-sectional area
mm 2
mm 2
S≤16
S
16<S≤35
16
35<S
S/2
R, S and T are the input terminals of the power supply, while U, V and W are the motor
terminals. Please connect the input power cables and motor cables with proper
techniques; otherwise the damage to the inverter may occur.
8
Goodrive300 inverters
Safety precautions
1.4.2 Commission and running
Disconnect all power supplies applied to the inverter before the terminal
wiring and wait for at least the designated time after disconnecting the
power supply.
High voltage is present inside the inverter during running. Do not carry
out any operation except for the keypad setting.
The inverter may start up by itself when P01.21=1. Do not get close to
the inverter and motor.
The inverter can not be used as “Emergency-stop device”.
The inverter can not be used to break the motor suddenly. A mechanical
braking device should be provided.
Besides the above items, check to ensure the following ones before the
installation and maintenance during the running of the permanent
synchronization motor:
1.
All input power supply is disconnected (including the main power
supply and the control power supply).
2.
The permanent magnet synchronization motor has stopped
running and measured to ensure the output voltage of the inverter
is less than 36V.
3.
The waiting time of the permanent magnet synchronization motor
after stopping is no less than the time designated and measure to
ensure the voltage between + and – is less than 36V.
4.
Ensure the permanent magnet synchronization motor does not
rotate again because of the external load. It is recommended to
install effectively external braking devices or disconnect the electric
wiring between the motor and the inverter directly.
Note:
Do not switch on or off the input power supply of the inverter frequently.
For inverters that have been stored for a long time, check and fix the capacitance and
try to run it again before utilization (see Maintenance and Hardware Fault
Diagnose).
Cover the front board before running, otherwise electric shock may occur.
9
Goodrive300 inverters
Safety precautions
1.4.3 Maintenance and replacement of components
Only qualified electricians are allowed to perform the maintenance,
inspection, and components replacement of the inverter.
Disconnect all power supplies to the inverter before the terminal wiring.
Wait for at least the time designated on the inverter after disconnection.
Take measures to avoid screws, cables and other conductive matters to
fall into the inverter during maintenance and component replacement.
Note:
Please select proper torque to tighten screws.
Keep the inverter, parts and components away from combustible materials during
maintenance and component replacement.
Do not carry out any isolation and pressure test on the inverter and do not measure
the control circuit of the inverter by megameter.
Carry out a sound anti-electrostatic protection to the inverter and its internal
components during maintenance and component replacement.
1.4.4 What to do after scrapping
There are heavy metals in the inverter. Deal with it as industrial effluent.
10
Goodrive300 inverters
Quick start-up
Quick Start-up
2
2.1 What this chapter contains
This chapter mainly describes the basic guidelines during the installation and commission
procedures on the inverter, which you may follow to install and commission the inverter
quickly.
2.2 Unpacking inspection
Check as followings after receiving products:
1. Check that there are no damage and humidification to the package. If not, please contact
with local agents or INVT offices.
2. Check the information on the type designation label on the outside of the package to
verify that the drive is of the correct type. If not, please contact with local dealers or INVT
offices.
3. Check that there are no signs of water in the package and no signs of damage or breach
to the inverter. If not, please contact with local dealers or INVT offices.
4. Check the information on the type designation label on the outside of the package to
verify that the name plate is of the correct type. If not, please contact with local dealers or
INVT offices.
5. Check to ensure the accessories (including user’s manual, control keypad and extension
card) inside the device is complete. If not, please contact with local dealers or INVT offices.
2.3 Application confirmation
Check the machine before beginning to use the inverter:
1. Check the load type to verify that there is no overload of the inverter during work and
check that whether the drive needs to modify the power degree.
2. Check that the actual current of the motor is less than the rated current of the inverter.
3. Check that the control accuracy of the load is the same of the inverter.
4. Check that the incoming supply voltage is correspondent to the rated voltage of the
inverter.
5. Check that the communication needs option card or not.
11
Goodrive300 inverters
Quick start-up
2.4 Environment
Check as followings before the actual installation and usage:
1. Check that the ambient temperature of the inverter is below 40℃ . If exceeds, derate 3%
for every additional 1℃ . Additionally, the inverter can not be used if the ambient
temperature is above 50℃.
Note: for the cabinet inverter, the ambient temperature means the air temperature inside
the cabinet.
2. Check that the ambient temperature of the inverter in actual usage is above -10℃. If not,
add heating facilities.
Note: for the cabinet inverter, the ambient temperature means the air temperature inside
the cabinet.
3. Check that the altitude of the actual usage site is below 1000m. If exceeds, derate1% for
every additional 100m.
4. Check that the humidity of the actual usage site is below 90% and condensation is not
allowed. If not, add additional protection inverters.
5. Check that the actual usage site is away from direct sunlight and foreign objects can not
enter the inverter. If not, add additional protective measures.
6. Check that there is no conductive dust or flammable gas in the actual usage site. If not,
add additional protection to inverters.
2.5 Installation confirmation
Check as followings after the installation:
1. Check that the load range of the input and output cables meet the need of actual load.
2. Check that the accessories of the inverter are correctly and properly installed. The
installation cables should meet the needs of every component (including reactors, input
filters, output reactors, output filters, DC reactors, braking units and braking resistors).
3. Check that the inverter is installed on non-flammable materials and the calorific
accessories (reactors and brake resistors) are away from flammable materials.
4. Check that all control cables and power cables are run separately and the routation
complies with EMC requirement.
5. Check that all grounding systems are properly grounded according to the requirements
of the inverter.
6. Check that the free space during installation is sufficient according to the instructions in
user’s manual.
12
Goodrive300 inverters
Quick start-up
7. Check that the installation conforms to the instructions in user’s manual. The drive must
be installed in an upright position.
8. Check that the external connection terminals are tightly fastened and the torque is
appropriate.
9. Check that there are no screws, cables and other conductive items left in the inverter. If
not, get them out.
2.6 Basic commission
Complete the basic commissioning as followings before actual utilization:
1. Select the motor type, set correct motor parameters and select control mode of the
inverter according to the actual motor parameters.
2. Autotune. If possible, de-coupled from the motor load to start dynamic autotune. Or if not,
static autotune is available.
3. Adjust the ACC/DEC time according to the actual running of the load.
4. Commission the device via jogging and check that the rotation direction is as required. If
not, change the rotation direction by changing the wiring of motor.
5. Set all control parameters and then operate.
13
Goodrive300 inverters
Product overview
Product Overview
3
3.1 What this chapter contains
The chapter briefly describes the operation principle, product characteristics, layout, name
plate and type designation information.
3.2 Basic principles
Goodrive300 series inverters are wall or flange mountable devices for controlling
asynchronous AC induction motors and permanent magnet synchronous motors.
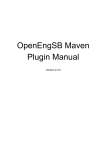
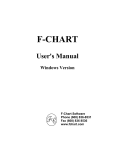
The diagram below shows the simplified main circuit diagram of the inverter. The rectifier
converts three-phase AC voltage to DC voltage. The capacitor bank of the intermediate
circuit stabilizes the DC voltage. The converter transforms the DC voltage back to AC
voltage for the AC motor. The brake pipe connects the external braking resistor to the
intermediate DC circuit to consume the feedback energy when the voltage in the circuit
exceeds its maximum limit.
Diagram 3-1 The simplified main circuit diagram (above 37kW (including 37kW))
Diagram 3-2 The simplified main circuit diagram (below 30kW (including 30kW))
14
Goodrive300 inverters
Product overview
Note:
1. The inverter above 37kW (including 37kW) supports external DC reactor which is an
optional part. Before connecting, it is necessary to remove the copper row between P1
and(+).
2. The inverter below 30kW (including 30kW) supports external braking resistor; the inverter
above 37kW (including 37kW) supports external braking units. Both the braking unit and the
braking resistor are optional parts.
3.3 Product specification
Function
Specification
AC 3PH 400V±15%
Input voltage (V)
Power
input
AC 3PH 660V±10%
Input current (A)
Input frequency (Hz)
Power
output
50Hz or 60Hz
Allowed range: 47~63Hz
0~input voltage
Output current (A)
Refer to the rated value
Output power (kW)
Refer to the rated value
(Hz)
Control mode
control
feature
Refer to the rated value
Output voltage (V)
Output frequency
Technical
AC 3PH 220V±10%
Motor type
Adjustable-speed
ratio
Speed control
0~400Hz
V/F, sensorless vector control
Asynchronous
motor
and
permanent
magnet
synchronous motor
Asynchronous motor 1:200 (SVC) synchronous
motor 1:20 (SVC)
±0.2% (sensorless vector control)
accuracy
Speed fluctuation
± 0.3%(sensorless vector control)
Torque response
<20ms(sensorless vector control)
Torque control
accuracy
Starting torque
10%(sensorless vector control)
Asynchronous motor: 0.25Hz/150%(sensorless
vector15
control)
Goodrive300 inverters
Product overview
Function
Specification
Synchronous motor: 2.5 Hz/150%(sensorless vector
control)
150% of rated current: 1 minute
Overload capability
180% of rated current: 10 seconds
200% of rated current: 1 second
Digital setting, analog setting, pulse frequency
setting, multi-stage speed running setting, simple
Frequency setting
method
PLC setting, PID setting, MODBUS communication
setting, PROFIBUS communication setting.
Realize the shifting between the set combination
and set channel.
Running
control
Auto-adjustment of
feature
the voltage
Keep a stable voltage automatically when the grid
voltage transients
Provide
Fault protection
over
30
fault
protection
functions:
overcurrent, overvoltage, undervoltage, overheating,
phase loss and overload, etc.
Restart after rotating
Realize the smooth starting of the rotating motor
speed tracking
Peripheral
Terminal analog input
interface
resolution
Terminal switch input
resolution
Analog input
Analog output
Not above 20mV
Not above 2ms
2 ways (AI1, AI2) 0~10V/0~20mA and 1 way (AI3)
-10~10V
2 ways (AO1, AO2) 0~10V /0~20mA
8 ways common input, the Max. frequency: 1kHz,
Digital input
internal impedance: 3.3kΩ;
1 way high speed input, the Max. frequency:
50kHz
1way high speed pulse output, the Max. frequency:
Digital output
50kHz;
1way Y terminal open collector pole output
16
Goodrive300 inverters
Product overview
Function
Specification
2 ways programmable relay output
Relay output
RO1A NO, RO1B NC, RO1C common terminal
RO2A NO, RO2B NC, RO2C common terminal
Contactor capability: 3A/AC250V,1A/DC30V
Mountable method
Temperature of the
Wall, flange and floor mountable
-10~50℃, derate above 40℃
running environment
Average non-fault
2 years (25℃ ambient temperature)
time
Protective degree
Cooling
Others
IP20
Air-cooling
Built in braking unit for below 30kW (including
Braking unit
30kW)
External braking unit for others
Built-in C3 filter: meet the degree requirement of
EMC filter
IEC61800-3 C3
External filter:meet the degree requirement of
IEC61800-3 C2
3.4 Nameplate
Fig 3-3 Name plate
3.5 Type designation key
The type designation contains information on the inverter. The user can find the type
designation on the type designation label attached to the inverter or the simple name plate.
17
Goodrive300 inverters
Product overview
GD300 – 5R5G – 4 – 2 T * *
①
②
③
④ ⑤
⑥
Fig 3-4 Product type
Field
Detailed
Sign
identification
Abbreviation
Detailed content
description of the
sign
①
Product
Goodrive300 is shorted for GD300.
abbreviation
Rated power
Voltage
degree
②
③
Power range +
5R5-5.5kW
Load type
G—Constant torque load
Voltage degree
400V
3.6 Rated specifications
Constant torque
The inverter
Rated
Rated
Weight(Kg)
Rated
Weight(Kg)
output
input
output
power (A)
current (A)
current (A)
GD300-1R5G-4
1.5
5.0
3.7
1.5
GD300-2R2G-4
2.2
5.8
5
2.2
GD300-004G-4
4
13.5
9.5
4
GD300-5R5G-4
5.5
19.5
14
5.5
GD300-7R5G-4
7.5
25
18.5
7.5
GD300-011G-4
11
32
25
11
GD300-015G/-4
15
40
32
15
GD300-018G-4
18.5
47
38
18.5
GD300-022G-4
22
56
45
22
GD300-030G-4
30
70
60
30
GD300-037G-4
37
80
75
37
GD300-045G-4
45
94
92
45
GD300-055G-4
55
128
115
55
GD300-075G-4
75
160
150
75
18
Goodrive300 inverters
Product overview
Constant torque
The inverter
Rated
Rated
Weight(Kg)
Rated
Weight(Kg)
output
input
output
power (A)
current (A)
current (A)
GD300-090G-4
90
190
180
90
GD300-110G-4
110
225
215
110
GD300-132G-4
132
265
260
132
GD300-160G-4
160
310
305
160
GD300-200G-4
200
385
380
200
GD300-220G-4
220
430
425
220
GD300-250G-4
250
485
480
250
GD300-280G-4
280
545
530
280
GD300-315G-4
315
610
600
315
GD300-350G-4
350
625
650
350
GD300-400G-4
400
715
720
400
GD300-500G-4
500
890
860
500
Note:
1. The input current of 1.5~315kW inverters is measured when the input voltage is 380V and
configured without DC reactor and input/output filter.
2. The input current of 350~500kW inverters is measured when the input voltage is 380V
and configured with input reactor.
3. The output current is defined as the output current when the output voltage is 380V.
Note: the inverter is configured LED keypad. The LCD keypad is optional with various
functions. The installation is compatible with that of the LED keypad.
Note: M3 nuts and the bracket can be used directly in the installation. The keypad bracket is
optional for 1.5~30kW inverters and configured for 37~500kW inverters.
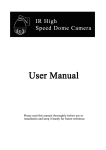
3.7 Structure diagram
Below is the layout figure of the inverter (take the inverter of 30kW as the example).
19
Goodrive300 inverters
Product overview
4
5
6
1
7
8
9
2
11
3
10
12
13
14
Fig 3-5 Product structure diagram
Serial
Name
Illustration
No.
1
Keypad connections
2
Upper cover
3
Keypad
4
Cooling fan
5
Cardboard
Connect the keypad
Protect the internal parts and components
See Keypad Operation Procedure for detailed
information
See Maintenance and Hardware Fault Diagnose for
detailed information
The cardboard, with installation holes, is the same as
the behind cover of the machine and, so it is
convenient for the installation.
6
Wire arrangement
Connect to the control board and the drive board
interface
7
Name plate
See Product Overview for detailed information
Optional part. The side cover will increase the
8
Side cover
protective degree
of the inverter.
The internal
temperature of the inverter will increase, too, so it is
necessary to derate the inverter at the same time
20
Goodrive300 inverters
Serial
Product overview
Name
Illustration
No.
9
Control terminals
See Electric Installation for detailed information
10
Main circuit terminals
See Electric Installation for detailed information
11
Main circuit cable entry
12
POWER light
13
Simple name plate
14
Lower cover
Fix the main circuit cable
Power indicator
See Product Overview for detailed information
Protect the internal parts and components
21
Goodrive300 inverters
Installation guidelines
Installation Guidelines
4
4.1 What this chapter contains
The chapter describes the mechanical installation and electric installation.
Only qualified electricians are allowed to carry out what described in this
chapter. Please operate as the instructions in Safety Precautions. Ignoring
these may cause physical injury or death or damage to the devices.
Ensure the power supply of the inverter is disconnected during the operation.
Wait for at least the time designated until the POWER indicator is off after the
disconnection if the power supply is applied. It is recommended to use the
multimeter to monitor that the DC bus voltage of the drive is under 36V.
The installation and design of the inverter should be complied with the
requirement of the local laws and regulations in the installation site. If the
installation infringes the requirement, our company will exempt from any
responsibility. Additionally, if users do not comply with the suggestion, some
damage beyond the assured maintenance range may occur.
4.2 Mechanical installation
4.2.1 Installation environment
The installation environment is the safeguard for a full performance and long-term stable
functions of the inverter. Check the installation environment as followings:
Environment
Installation site
Conditions
Indoor
-10~+50℃
If the ambient temperature of the inverter is above 40℃ , derate 3%
for every additional 1℃ .
Environment
temperature
It is not recommended to use the inverter if the ambient
temperature is above 50℃ .
In order to improve the reliability of the device, do not use the
inverter if the ambient temperature changes frequently.
Please provide cooling fan or air conditioner to control the internal
ambient temperature below the required one if the inverter is used
22
Goodrive300 inverters
Installation guidelines
Environment
Conditions
in a close space such as in the control cabinet.
When the temperature is too low, if the inverter needs to restart to
run after a long stop, it is necessary to provide an external heating
device to increase the internal temperature, otherwise damage to
the devices may occur.
RH≤90%
Humidity
No condensation is allowed.
The maximum relative humility should be equal to or less than
60% in corrosive air.
Storage
temperature
-30~+60℃
The installation site of the inverter should:
keep away from the electromagnetic radiation source;
keep away from contaminative air, such as corrosive gas, oil mist
Running
and flammable gas;
environment
ensure foreign objects, such as metal power, dust, oil, water can
condition
not enter into the inverter(do not install the inverter on the
flammable materials such as wood);
keep away from direct sunlight, oil mist, steam and vibration
environment.
Below 1000m
Altitude
If the sea level is above 1000m, please derate 1% for every
additional 100m.
Vibration
Installation direction
≤ 5.88m/s2(0.6g)
The inverter should be installed on an upright position to ensure
sufficient cooling effect.
Note:
Goodrive300 series inverters should be installed in a clean and ventilated
environment according to enclosure classification.
Cooling air must be clean, free from corrosive materials and electrically conductive
dust.
23
Goodrive300 inverters
Installation guidelines
4.2.2 Installation direction
The inverter may be installed on the wall or in a cabinet.
The inverter must be installed in an upright position. Check the installation site according to
the requirements below. Refer to chapter Dimension Drawings in the appendix for frame
details.
Fig 4-1 Installation direction of the inverter
4.2.3 Installation manner
The inverter can be installed in three different ways, depending on the frame size:
a) Wall mounting (≤315kW)
b) Flange mounting (≤200kW)
c) Floor mounting (220kW-500k)
Fig 4-2 Installation manner
(1)Mark the hole location. The location of the holes is shown in the dimension drawings in
the appendix.
(2)Fix the screws or bolts to the marked locations..
(3)Position the drive onto the wall.
(4)Tighten the screws in the wall securely.
24
Goodrive300 inverters
Installation guidelines
Note: the flange installation of 1.5~30kW inverters need flange board, while the flange
installation of 37~200kW inverters do not need.
4.2.4 Single installation
Fig 4-3 Single installation
Note:The minimum space of B and C is 100mm.
4.2.5 Multiple installations
Parallel installation
Fig 4-4 Parallel installation
Note:
Before installing the different sizes inverters,please align their top position for the
convenience of later maintenance.
The minimum space of B, D and C is 100mm.
25
Goodrive300 inverters
Installation guidelines
4.2.6 Vertical installation
Fig 4-5 Vertical installation
Note: Windscreen should be added in Vertical installation for avoiding mutual impact and
insufficient cooling.
26
Goodrive300 inverters
Installation guidelines
4.2.7 Tilt installation
Fig 4-6 Tilt installation
Note: Ensure the separation of the wind input and output channels in tilt installation for
avoiding mutual impact.
27
Goodrive300 inverters
Installation guidelines
4.3 Standard wiring
4.3.1 Connection diagram of main circuit
Diagram 4-7 Connection diagram of main circuit
Note:
The fuse, DC reactor, braking unit, braking resistor, input reactor, input filter, output
reactor, output filter are optional parts. Please refer to Peripheral Optional Parts for
detailed information.
A1 and A2 are optional parts.
P1 and (+) are short circuited in factory, if need to connect with the DC rector, please
remove the contact tag between P1 and (+).
28
Goodrive300 inverters
Installation guidelines
4.3.2 Terminals figure of main circuit
Fig 4-8 1.5~2.2 kW terminals of main circuit
Fig 4-9 4~5.5 kW terminals of main circuit
Fig 4-10 7.5~11kW terminals of main circuit
29
Goodrive300 inverters
Installation guidelines
Fig 4-11 15~18kW terminals of main circuit
Fig 4-12 22~30kW terminals of main circuit
Fig 4-13 37~55 kW terminals of main circuit
30
Goodrive300 inverters
Installation guidelines
Fig 4-14 75~110kW terminals of main circuit
Fig 4-15 132~315kW terminals of main circuit
Terminal name
Terminal
Below 30kW
sign
(including 30
Function
Above 37kW(including 37 kW)
kW)
R
S
3-phase AC input terminals
Power input of the main circuit
which
are
generally
connected with the power
T
U
supply.
The inverter output
31
3-phase AC output terminals
Goodrive300 inverters
Installation guidelines
Terminal name
Terminal
Below 30kW
sign
(including 30
Function
Above 37kW(including 37 kW)
kW)
V
which
W
connected with the motor.
This terminal is
P1
inexistent
DC reactor terminal 1
are
generally
P1 and (+) are connected
with the terminals of DC
Braking resistor DC reactor terminal 2, braking unit reactor.
(+)
1
(-)
/
terminal 1
(+) and (-) are connected
Braking unit terminal 2
with the terminals of braking
unit.
PB and (+) are connected
Braking
PB
This terminal is inexistent.
resistor 2
with the terminals of braking
resistor.
Protective
grounding
terminals, every machine is
provided 2 PE terminals as
PE
400V:the grounding resistor is less than 10Ohm
the standard configuration.
These terminals should be
grounded
with
proper
techniques.
Optional parts (external
A1 and A2
Control power supply terminal
220V control power
supply)
Note:
Do not use an asymmetrically constructed motor cable. If there is a symmetrically
constructed grounding conductor in the motor cable in addition to the conductive
shield, connect the grounding conductor to the grounding terminal at the inverter
and motor ends.
Braking resistor, braking unit and DC reactor are optional parts.
Route the motor cable, input power cable and control cables separately.
If the terminal is not appeared, the machine does not provide the terminal as the
32
Goodrive300 inverters
Installation guidelines
external terminal.
4.3.3 Wiring of terminals in main circuit
1. Fasten the grounding conductor of the input power cable with the grounding terminal of
the inverter (PE) by 360 degree grounding technique. Connect the phase conductors to R, S
and T terminals and fasten.
2. Strip the motor cable and connect the shield to the grounding terminal of the inverter by
360 degree grounding technique. Connect the phase conductors to U, V and W terminals
and fasten.
3. Connect the optional brake resistor with a shielded cable to the designated position by the
same procedures in the previous step.
4. Secure the cables outside the inverter mechanically.
Fig 4-14 Correct installation of the screw
Fig 4-15 360 degree grounding technique
33
Goodrive300 inverters
Installation guidelines
4.3.4 Wiring diagram of control circuit
Fig 4-18 Wiring of control circuit
4.3.5 Terminals of control circuit
Fig 4-17 Terminals of control circuit
34
Goodrive300 inverters
Installation guidelines
Terminal
Description
name
+10V
AI1
AI2
Local power supply +10V
1. Input range: AI1/AI2 voltage and current can be chose:
0~10V/0~20mA;AI1 can be shifted by J1; AI2 can be shifted by J2
AI3:-10V~+10V
2. Input impedance:voltage input: 20kΩ; current input: 500Ω
AI3
3. Resolution: the minimum one is 5mV when 10V corresponds to
50Hz
4. Deviation ±1%, 25℃
GND
+10V reference null potential
AO1
1. Output range:0~10V or -20~20mA
2. The voltage or the current output is depended on the jumper
AO2
3. Deviation±1%,25℃
Terminal
Description
name
RO1A
RO1 relay output, RO1A NO, RO1B NC, RO1C common terminal
RO1B
Contactor capability: 3A/AC250V,1A/DC30V
RO1C
RO2A
RO2 relay output, RO2A NO, RO2B NC, RO2C common terminal
RO2B
Contactor capability: 3A/AC250V,1A/DC30V
RO2C
35
Goodrive300 inverters
Installation guidelines
Terminal
Description
name
PE
Grounding terminal
Provide the input switch working power supply from external to
PW
internal.
Voltage range: 12~24V
24V
COM
The inverter provides the power supply for users with a maximum
output current of 200mA
+24V common terminal
S1
Switch input 1
S2
Switch input 2
S3
Switch input 3
S4
Switch input 4
terminal supporting both NPN and PNP
S5
Switch input 5
4. Max input frequency:1kHz
S6
Switch input 6
S7
Switch input 7
S8
Switch input 8
1. Internal impedance:3.3kΩ
2. 12~30V voltage input is available
3. The terminal is the dual-direction input
5.
All
are programmable digital
input
terminal. User can set the terminal function
through function codes.
Except for S1~S8, this terminal can be used as high frequency
HDI
input channel.
Max. input frequency:50kHz
Terminal
Description
name
24V
HDO
The inverter provides the power supply for users with a maximum
output current of 200mA
1. Switch input:200mA/30V
2. Output frequency range:0~50kHz
COM
+24V common terminal
CME
Common terminal of the open collector pole output
Y
1.Swtich capability:200mA/30V
2.Output frequency range:0~1kHz
36
Goodrive300 inverters
Installation guidelines
485+
485 communication interface and 485 differential signal interface
If it is the standard 485 communication interface, please use
485-
twisted pairs or shield cable.
4.3.6 Input /Output signal connection figure
Please use U-shaped contact tag to set NPN mode or PNP mode and the internal or external
power supply. The default setting is NPN internal mode.
Fig 4-18 U-shaped contact tag
If the signal is from NPN transistor, please set the U-shaped contact tag between +24V and
PW as below according to the used power supply.
Diagram 4-19 NPN modes
If the signal is from PNP transistor, please set the U-shaped contact tag as below according
to the used power supply.
37
Goodrive300 inverters
Installation guidelines
Diagram 4-20 PNP modes
4.4 Layout protection
4.4.1 Protecting the inverter and input power cable in short-circuit situations
Protect the inverter and input power cable in short circuit situations and against thermal
overload.
Arrange the protection according to the following guidelines.
Fig 4-16 Fuse configuration
Note: Select the fuse as the manual indicated. The fuse will protect the input power cable
from damage in short-circuit situations. It will protect the surrounding devices when the
internal of the inverter is short circuited.
4.4.2 Protecting the motor and motor cable in short-circuit situations
The inverter protects the motor and motor cable in a short-circuit situation when the motor
cable is dimensioned according to the rated current of the inverter. No additional protection
devices are needed.
If the inverter is connected to multiple motors, a separate thermal
overload switch or a circuit breaker must be used for protecting each
cable and motor. These devices may require a separate fuse to cut off
38
Goodrive300 inverters
Installation guidelines
the short-circuit current.
4.4.3 Protecting the motor against thermal overload
According to regulations, the motor must be protected against thermal overload and the
current must be switched off when overload is detected. The inverter includes a motor
thermal protection function that protects the motor and closes the output to switch off the
current when necessary.
4.4.4 Implementing a bypass connection
It is necessary to set power frequency and variable frequency conversion circuits for the
assurance of continuous normal work of the inverter if faults occur in some significant
situations.
In some special situations, for example, if it is only used in soft start, the inverter can be
conversed into power frequency running after starting and some corresponding bypass
should be added.
Never connect the supply power to the inverter output terminals U, V
and W. Power line voltage applied to the output can result in permanent
damage to the inverter.
If frequent shifting is required, employ mechanically connected switches or contactors to
ensure that the motor terminals are not connected to the AC power line and inverter output
terminals simultaneously.
39
Goodrive300 inverters
Keypad operation procedure
Keypad Operation Procedure
5
5.1 What this chapter contains
This chapter contains following operation:
• Buttons, indicating lights and the screen as well as the methods to inspect, modify and
set function codes by keypad
• Start-up
5.2 Keypad
The keypad is used to control Goodrive300 series inverters, read the state data and adjust
parameters.
Fig 5-1 Keypad
Seri
Name
Description
al
No.
LED off means that the inverter is in the
stopping state; LED blinking means the
1
State LED
inverter is in the parameter autotune
RUN/TUNE
state; LED on means the inverter is in
the running state.
FED/REV LED
LED off means the inverter is in the
FWD/REV
forward rotation state; LED on means
40
Goodrive300 inverters
Seri
Keypad operation procedure
Name
Description
al
No.
the inverter is in the reverse rotation
state
LED for keypad operation, terminals
operation and remote communication
control
LED off means that the inverter is in the
LOCAL/REMOT
keypad operation state; LED blinking
means the inverter is in the terminals
operation state; LED on means the
inverter is in the remote communication
control state.
LED for faults
LED on when the inverter is in the fault
TRIP
state; LED off in normal state; LED
blinking means the inverter is in the
pre-alarm state.
Mean the unit displayed currently
2
Hz
Frequency unit
A
Current unit
V
Voltage unit
RPM
Rotating speed unit
%
Percentage
Unit LED
5-figure LED display displays various monitoring data and alarm code
such as set frequency and output frequency.
Display
Code
3
displaying
zone
ed
word
Correspon
ding word
Display
ed
word
Correspon
ding word
Display
ed
word
Correspon
ding word
0
1
2
3
4
5
7
8
6
41
Goodrive300 inverters
Seri
Keypad operation procedure
Name
Description
al
No.
9
A
B
C
d
E
F
H
I
L
N
n
o
P
r
S
t
U
v
.
-
Digital
4
potentiom
Tuning frequency. Please refer to P08.41.
eter
Enter or escape from the first level
5
Buttons
Programming key menu
and
remove the
parameter
quickly
Entry key
Enter the menu step-by-step
Confirm parameters
UP key
DOWN key
Increase data or function code
progressively
Decrease data or function code
progressively
Move right to select the displaying
parameter circularly in stopping and
Right-shift key
running mode.
Select the parameter modifying digit
during the parameter modification
Run key
This key is used to operate on the
inverter in key operation mode
Stop/
This key is used to stop in running state
Reset key
and it is limited by function code P07.04
42
This key is used to reset all control
Goodrive300 inverters
Seri
Keypad operation procedure
Name
Description
al
No.
modes in the fault alarm state
Quick key
The function of this key is confirmed by
function code P07.02.
5.3 Keypad displaying
The keypad displaying state of Goodrive300 series inverters is divided into stopping state
parameter, running state parameter, function code parameter editing state and fault alarm
state and so on.
5.3.1 Displayed state of stopping parameter
When the inverter is in the stopping state, the keypad will display stopping parameters which
is shown in figure 5-2.
In the stopping state, various kinds of parameters can be displayed. Select the parameters
to be displayed or not by P07.07. See the instructions of P07.07 for the detailed definition of
each bit.
In the stopping state, there are 14 stopping parameters can be selected to be displayed or
not. They are: set frequency, bus voltage, input terminals state, output terminals state, PID
given value, PID feedback value, torque set value, AI1, AI2, AI3, HDI, PLC and the current
stage of multi-stage speeds, pulse counting value, length value. P07.07 can select the
parameter to be displayed or not by bit and》/SHIFT can shift the parameters form left to right,
QUICK/JOG(P07.02=2) can shift the parameters form right to left.
5.3.2 Displayed state of running parameters
After the inverter receives valid running commands, the inverter will enter into the running
state and the keypad will display the running parameters. RUN/TUNE LED on the keypad is
on, while the FWD/REV is determined by the current running direction which is shown as
figure 5-2.
In the running state, there are 24 parameters can be selected to be displayed or not. They
are: running frequency, set frequency, bus voltage, output voltage, output torque, PID given
value, PID feedback value, input terminals state, output terminals state, torque set value,
length value, PLC and the current stage of multi-stage speeds, pulse counting value, AI1,
AI2, AI3, HDI, percentage of motor overload, percentage of inverter overload, ramp given
43
Goodrive300 inverters
Keypad operation procedure
value, linear speed, AC input current. P07.05 and P07.06 can select the parameter to be
displayed or not by bit and 》 /SHIFT can shift the parameters form left to right,
QUICK/JOG(P07.02=2) can shift the parameters from right to left.
5.3.3 Displayed state of fault
If the inverter detects the fault signal, it will enter into the fault pre-alarm displaying state. The
keypad will display the fault code by flicking. The TRIP LED on the keypad is on, and the
fault reset can be operated by theSTOP/RST on the keypad, control terminals or
communication commands.
5.3.4 Displayed state of function codes editing
In the state of stopping, running or fault, press PRG/ESC
to enter into the editing state (if
there is a password, see P07.00 ).The editing state is displayed on two classes of menu, and
the order is: function code group/function code number→function code parameter, press
DATA/ENT into the displayed state of function parameter. On this state, you can press
DATA/ENT to save the parameters or press PRG/ESC to retreat.
Fig 5-2 Displayed state
5.4 Keypad operation
Operate the inverter via operation panel. See the detailed structure description of function
codes in the brief diagram of function codes.
5.4.1 How to modify the function codes of the inverter
The inverter has three levels menu, which are:
1. Group number of function code (first-level menu)
2. Tab of function code (second-level menu)
3. Set value of function code (third-level menu)
44
Goodrive300 inverters
Keypad operation procedure
Remarks: Press both the PRG/ESC and the DATA/ENT can return to the second-level menu
from the third-level menu. The difference is: pressing DATA/ENT will save the set
parameters into the control panel, and then return to the second-level menu with shifting to
the next function code automatically; while pressing PRG/ESC will directly return to the
second-level menu without saving the parameters, and keep staying at the current function
code.
Under the third-level menu, if the parameter has no flickering bit, it means the function code
cannot be modified. The possible reasons could be:
1) This function code is not modifiable parameter, such as actual detected parameter,
operation records and so on;
2) This function code is not modifiable in running state, but modifiable in stop state.
Example:Set function code P00.01 from 0 to 1.
Fig 5-2 Sketch map of modifying parameters
5.4.2 How to set the password of the inverter
Goodrive300 series inverters provide password protection function to users. Set P7.00 to
gain the password and the password protection becomes valid instantly after quitting from
the function code editing state. Press PRG/ESC again to the function code editing state,
“0.0.0.0.0” will be displayed. Unless using the correct password, the operators cannot enter
it.
Set P7.00 to 0 to cancel password protection function.
The password protection becomes effective instantly after retreating form the function code
editing state. Press PRG/ESC again to the function code editing state, “0.0.0.0.0” will be
45
Goodrive300 inverters
Keypad operation procedure
displayed. Unless using the correct password, the operators cannot enter it.
Fig 5-3 Sketch map of password setting
5.4.3 How to watch the inverter state through function codes
Goodrive300 series inverters provide group P17 as the state inspection group. Users can
enter into P17 directly to watch the state.
Fig 5-4 Sketch map of state watching
46
Goodrive300 inverters
Function codes
Function Parameters
6
6.1 What this chapter contains
This chapter lists and describes the function parameters.
6.2 Goodrive300 general series function parameters
The function parameters of Goodrive300 series inverters have been divided into 30 groups
(P00~P29) according to the function, of which P18~P28 are reserved. Each function group
contains certain function codes applying 3-level menus. For example, “P08.08” means the
eighth function code in the P8 group function, P29 group is factory reserved, and users are
forbidden to access these parameters.
For the convenience of function codes setting, the function group number corresponds to the
first level menu, the function code corresponds to the second level menu and the function
code corresponds to the third level menu.
1. Below is the instruction of the function lists:
The first line “Function code”:codes of function parameter group and parameters;
The second line “Name”:full name of function parameters;
The third line “Detailed illustration of parameters”:Detailed illustration of the function
parameters
The fourth line “Default value”:the original factory set value of the function parameter;
The fifth line “Modify”:the modifying character of function codes (the parameters can be
modified or not and the modifying conditions),below is the instruction:
“○”: means the set value of the parameter can be modified on stop and running state;
“◎”: means the set value of the parameter can not be modified on the running state;
“●”: means the value of the parameter is the real detection value which can not be
modified.
(The inverter has limited the automatic inspection of the modifying character of the
parameters to help users avoid mismodifying)
2. “Parameter radix” is decimal (DEC), if the parameter is expressed by hex, then the
parameter is separated from each other when editing. The setting range of certain bits are
0~F (hex).
3.”The default value” means the function parameter will restore to the default value during
default parameters restoring. But the detected parameter or recorded value won’t be
47
Goodrive300 inverters
Function codes
restored.
4. For a better parameter protection, the inverter provides password protection to the
parameters. After setting the password (set P07.00 to any non-zero number), the system will
come into the state of password verification firstly after the user press PRG/ESC to come
into the function code editing state. And then “0.0.0.0.0.” will be displayed. Unless the user
input right password, they cannot enter into the system. For the factory setting parameter
zone, it needs correct factory password (remind that the users can not modify the factory
parameters by themselves, otherwise, if the parameter setting is incorrect, damage to the
inverter may occur). If the password protection is unlocked, the user can modify the
password freely and the inverter will work as the last setting one. When P07.00 is set to 0,
the password can be canceled. If P07.00 is not 0 during powering on, then the parameter is
protected by the password. When modify the parameters by serial communication, the
function of the password follows the above rules, too.
Functio
Name
n code
P00 Group
Detailed instruction of parameters
Default Modif
value
y
Basic function group
0: Sensorless vector control mode 0 (applying to
AM,SM)
0 is suitable in most cases, and in principle, one
inverter can only drive one motor in the vector
control mode.
1: Sensorless vector control mode 1 (applying to
AM)
P00.00
Speed
1 is suitable in high performance cases with the
control mode advantage of high accuracy of rotating speed and
1
◎
torque. It does not need to install pulse encoder.
2:V/F control (applying to AM,SM)
2 is suitable in cases where it does not need high
control accuracy, such as the load of fan and pump.
One inverter can drive multiple motors.
Note: AM-Asynchronous motor SM- synchronous
motor
Run
P00.01
Select the run command channel of the inverter.
command The control command of the inverter includes:
channel
start-up, stop, forward, reverse, jogging and fault
48
0
○
Goodrive300 inverters
Functio
n code
Function codes
Name
Detailed instruction of parameters
Default Modif
value
y
0
○
reset.
0:Keypad running command
channel(“LOCAL/REMOT” light off)
Carry out the command control by RUN, STOP/RST
on the keypad.
Set the multi-function key QUICK/JOG to
FWD/REVC shifting function (P07.02=3) to change
the running direction; press RUN and STOP/RST
simultaneously in running state to make the inverter
coast to stop.
1:Terminal running command channel
(“LOCAL/REMOT” flickering)
Carry out the running command control by the
forward rotation, reverse rotation and forward
jogging and reverse jogging of the multi-function
terminals
2:Communication running command channel
(“LOCAL/REMOT” on);
The running command is controlled by the upper
monitor via communication
Select the controlling communication command
channel of the inverter.
Communicati
P00.02
on running
commands
channel
0:MODBUS communication channel
1:PROFIBUS communication channel
2:Ethernet communication channel
3:CAN communication channel
Note: 1, 2 and 3 are extension functions which can
be used only when corresponding extension cards
are configured.
This parameter is used to set the maximum output
P00.03
Max. output
frequency
frequency of the inverter. Users should pay attention
to this parameter because it is the foundation of the
frequency setting and the speed of acceleration and
deceleration.
49
50.00H
z
◎
Goodrive300 inverters
Functio
n code
Name
Function codes
Detailed instruction of parameters
Default Modif
value
y
Setting range: P00.04~400.00Hz
The upper limit of the running frequency is the upper
Upper limit of limit of the output frequency of the inverter which is
P00.04
the running lower than or equal to the maximum frequency.
frequency Setting range:P00.05~P00.03 (Max. output
50.00H
◎
z
frequency)
The lower limit of the running frequency is that of the
output frequency of the inverter.
Lower limit of
P00.05
the running
frequency
The inverter runs at the lower limit frequency if the
set frequency is lower than the lower limit one.
Note: Max. output frequency ≥ Upper limit frequency
0.00Hz
◎
0
○
1
○
≥ Lower limit frequency
Setting range:0.00Hz~P00.04 (Upper limit of the
running frequency)
P00.06
A frequency 0:Keypad data setting
command Modify the value of function code P00.10 (set the
frequency by keypad) to modify the frequency by the
keypad.
1:Analog AI1 setting
2:Analog AI2 setting
3:Analog AI3 setting
Set the frequency by analog input terminals.
Goodrive300 series inverters provide 3 ways analog
input terminals as the standard configuration, of
P00.07
B frequency which AI1/AI2 are the voltage/current option
command (0~10V/0~20mA) which can be shifted by jumpers;
while AI3 is voltage input (-10V~+10V).
Note: when analog AI1/AI2 select 0~20mA input, the
corresponding voltage of 20mA is 10V.
100.0% of the analog input setting corresponds to
the maximum frequency (function code P00.03) in
forward direction and -100.0% corresponds to the
maximum frequency in reverse direction (function
code P00.03)
50
Goodrive300 inverters
Functio
n code
Name
Function codes
Detailed instruction of parameters
4:High-speed pulse HDI setting
The frequency is set by high-speed pulse terminals.
Goodrive300 series inverters provide 1 way high
speed pulse input as the standard configuration. The
pulse frequency range is 0.0~50.00kHz.
100.0% of the high speed pulse input setting
corresponds to the maximum frequency in forward
direction (function code P00.03) and -100.0%
corresponds to the maximum frequency in reverse
direction (function code P00.03).
Note: The pulse setting can only be input by
multi-function terminals HDI. Set P05.00 (HDI input
selection) to high speed pulse input, and set P05.49
(HDI high speed pulse input function selection) to
frequency setting input.
5:Simple PLC program setting
The inverter runs at simple PLC program mode
when P00.06=5 or P00.07=5. Set P10 (simple PLC
and multi-stage speed control) to select the running
frequency, running direction, ACC/DEC time and the
keeping time of corresponding stage. See the
function description of P10 for detailed information.
6: Multi-stage speed running setting
The inverter runs at multi-stage speed mode when
P00.06=6 or P00.07=6. Set P05 to select the current
running stage, and set P10 to select the current
running frequency.
The multi-stage speed has the priority when P00.06
or P00.07 does not equal to 6, but the setting stage
can only be the 1~15 stage. The setting stage is
1~15 if P00.06 or P00.07 equals to 6.
7: PID control setting
The running mode of the inverter is process PID
control when P00.06=7 or P00.07=7. It is necessary
51
Default Modif
value
y
Goodrive300 inverters
Functio
n code
Name
Function codes
Detailed instruction of parameters
Default Modif
value
y
0
○
0
○
to set P09. The running frequency of the inverter is
the value after PID effect. See P09 for the detailed
information of the given source, given value,
feedback source of PID.
8:MODBUS communication setting
The frequency is set by MODBUS communication.
See P14 for detailed information.
9:PROFIBUS communication setting
The frequency is set by PROFIBUS communication.
See P15 for the detailed information.
10:Ethernet communication setting(reserved)
11:CAN communication setting(reserved)
Note:A frequency and B frequency can not set as
the same frequency given method.
0:Maximum output frequency,
B frequency setting
100% of
corresponds to the maximum
B frequency output frequency
P00.08
command 1:A frequency command, 100% of B frequency
reference setting corresponds to the maximum output
frequency. Select this setting if it needs to adjust on
the base of A frequency command.
0: A, the current frequency setting is A freauency
command
1: B, the current frequency setting is B frequency
command
2: A+B, the current frequency setting is A frequency
Combination command + B frequency command
P00.09 of the setting 3: A-B, the current frequency setting is A frequency
source
command - B frequency command
4: Max (A, B):The bigger one between A frequency
command and B frequency is the set frequency.
5: Min (A, B):The lower one between A frequency
command and B frequency is the set frequency.
Note:The combination manner can be shifted by
52
Goodrive300 inverters
Functio
n code
Name
Function codes
Detailed instruction of parameters
Default Modif
value
y
P5(terminal function)
When A and B frequency commands are selected as
P00.10
Keypad set
frequency
“keypad setting”, the value of the function code is the
original setting one of the frequency data of the
inverter.
50.00H
○
z
Setting range:0.00 Hz~P00.03(the Max. frequency)
ACC time means the time needed if the inverter
P00.11
speeds up from 0Hz to the Max. One (P00.03).
ACC time 1 DEC time means the time needed if the inverter
Depend
on
○
speeds down from the Max. Output frequency to 0Hz model
(P00.03).
Goodrive300 series inverters define four groups of
ACC/DEC time which can be selected by P05. The
P00.12
DEC time 1 factory default ACC/DEC time of the inverter is the
first group.
Depend
on
○
model
Setting range of P00.11 and P00.12:0.0~3600.0s
0: Runs at the default direction, the inverter runs in
the forward direction. FWD/REV indicator is off.
1:Runs at the oppositing direction, the inverter runs
in the reverse direction. FWD/REV indicator is on.
Modify the function code to shift the rotation direction
of the motor. This effect equals to the shifting the
rotation direction by adjusting either two of the motor
P00.13
Running
direction
lines (U, V and W). The motor rotation direction can
be changed by QUICK/JOG on the keypad. Refer to
parameter P07.02.
Note: When the function parameter comes back to
the default value, the motor’s running direction will
come back to the factory default state, too. In some
cases it should be used with caution after
commissioning if the change of rotation direction is
disabled.
2: Forbid to run in reverse direction: It can be used in
53
0
○
Goodrive300 inverters
Functio
n code
Name
Function codes
Detailed instruction of parameters
Default Modif
value
y
some special cases if the reverse running is
disabled.
The relationship table of the motor type and carrier
frequency:
The factory value of
Motor type
carrier frequency
1.5~11kW
8kHz
15~55kW
4kHz
Above
75kW
2kHz
The advantage of high carrier frequency: ideal
Carrier
P00.14
frequency
setting
current waveform, little current harmonic wave and
Depend
on
motor noise.
The disadvantage of high carrier frequency:
increasing the switch loss, increasing inverter
temperature and the impact to the output capacity.
The inverter needs to derate on high carrier
frequency. At the same time, the leakage and
electrical magnetic interference will increase.
Applying low carrier frequency is contrary to the
above, too low carrier frequency will cause unstable
running, torque decreasing and surge.
The manufacturer has set a reasonal carrier
frequency when the inverter is in factory. In general,
users do not need to change the parameter.
When the frequency used exceeds the default carrier
frequency, the inverter needs to derate 20% for each
54
model
○
Goodrive300 inverters
Functio
Name
n code
Function codes
Detailed instruction of parameters
Default Modif
value
y
0
◎
1
○
0
◎
0
◎
0
◎
additional 1k carrier frequency.
Setting range:1.0~15.0kHz
0:No operation
1:Rotation autotuning
Comprehensive motor parameter autotune
It is recommended to use rotation autotuning when
high control accuracy is needed.
Motor
P00.15
2: Static autotuning 1(autotune totally); It is suitable
parameter in the cases when the motor can not de-couple form
autotuning the load. The antotuning for the motor parameter will
impact the control accuracy.
3: Static autotuning 2(autotune part parameters);
when the current motor is motor 1, autotune P02.06,
P02.07, P02.08; and when the current motor is
motor 2, autotune P12.06, P12.07, P02.08.
0:Invalid
P00.16
AVR function
selection
1:Valid during the whole prodecure
The auto-adjusting function of the inverter can
cancel the impact on the output voltage of the
inverter because of the bus voltage fluctuation.
P00.17
Reserved Reserved
0:No operation
1:Restore the default value
Function
P00.18
restore
2:Cancel the fault record
Note: The function code will restore to 0 after
parameter finishing the operation of the selected function code.
Restoring to the default value will cancel the user
password, please use this function with caution.
P01 Group
Start-up and stop control
0:Start-up directly:start from the starting frequency
P01.01
P01.00
Start mode 1:Start-up after DC braking: start the motor from the
starting frequency after DC braking (set the
parameter P01.03 and P01.04). It is suitable in the
55
Goodrive300 inverters
Functio
n code
Name
Function codes
Detailed instruction of parameters
Default Modif
value
y
0.50Hz
◎
0.0s
◎
0.0%
◎
cases where reverse rotation may occur to the low
inertia load during starting.
2: Start-up after reverse tracing: start the rotating
motor smoothly after tracking the rotation speed and
direction automatically. It is suitable in the cases
where reverse rotation may occur to the big inertia
load during starting.
Note: it is recommended to start the synchronous
motor directly.
Starting
P01.01 frequency of
direct start
Starting frequency of direct start-up means the
original frequency during the inverter starting. See
P01.02 for detailed information.
Setting range: 0.00~50.00Hz
Set a proper starting frequency to increase the
torque of the inverter during starting. During the
retention time of the starting frequency, the output
frequency of the inverter is the starting frequency.
And then, the inverter will run from the starting
frequency to the set frequency. If the set frequency is
lower than the starting frequency, the inverter will
stop running and keep in the stand-by state. The
Retention
P01.02
starting frequency is not limited in the lower limit
time of the frequency.
starting
frequency
Setting range: 0.0~50.0s
P01.03 The braking
The inverter will carry out DC braking at the braking
56
Goodrive300 inverters
Functio
n code
Name
Function codes
Detailed instruction of parameters
current
current set before starting and it will speed up after
before
the DC braking time. If the DC braking time is set to
starting
0, the DC braking is invalid.
Default Modif
value
y
0.0s
◎
0
◎
The stronger the braking current, the bigger the
The braking
P01.04
time before
starting
braking power. The DC braking current before
starting means the percentage of the rated current of
the inverter.
The setting range of P01.03: 0.0~150.0%
The setting range of P01.04: 0.0~50.0s
The changing mode of the frequency during start-up
and running.
0:Linear type
The output frequency increases or decreases
linearly.
ACC/DEC
P01.05
selection
1: Reserved
P01.06
Reserved
Reserv
◎
ed
P01.07
Reserved
Reserv
ed
57
◎
Goodrive300 inverters
Functio
n code
Name
Function codes
Detailed instruction of parameters
Default Modif
value
y
0
○
0.00Hz
○
0.0s
○
0: Decelerate to stop: after the stop command
becomes valid, the inverter decelerates to decrease
the output frequency during the set time. When the
P01.08
Stop mode frequency decreases to 0, the inverter stops.
1: Coast to stop: after the stop command becomes
valid, the inverter ceases the output immediately.
And the load coasts to stop at the mechanical inertia.
Starting
The starting frequency of stop braking: the inverter
P01.09 frequency of will carry on stop DC braking when the frequency is
DC braking arrived during the procedure of decelerating to stop.
Waiting time The waiting time of stop braking: before the stop DC
P01.10
before DC braking, the inverter will close output and begin to
braking
P01.11
carry on the DC braking after the waiting time. This
DC braking action is used to avoid the overcurrent fault caused
by DC braking when the speed is too high.
current
○
0.0%
Stop DC braking current: the DC brake added. The
○
stronger the current, the bigger the DC braking
effect.
The braking time of stop braking:The retention time
of DC brake. If the time is 0, the DC brake is invalid.
The inverter will stop at the set deceleration time.
DC braking
P01.12
0.0s
time
Setting range of P01.09: 0.00~P00.03 (the Max.
frequency)
Setting range of P01.10: 0.0~50.0s
58
Goodrive300 inverters
Functio
n code
Name
Function codes
Detailed instruction of parameters
Default Modif
value
y
0.0s
○
0
◎
0.50 Hz
◎
0
◎
0.05s
◎
Setting range of P01.11: 0.0~150.0%
Setting range of P01.12: 0.0~50.0s
During the procedure of switching for/rev rotation,
set the threshold by P01.14, which is as the table
below:
Dead time of
P01.13
FWD/REV
rotation
Setting range: 0.0~3600.0s
Shifting
between
P01.14
FWD/REV
rotation
P01.15
Stopping
speed
Set the threshold point of the inverter:
0:Switch after 0 frequency
1:Switch after the starting frequency
2: Switch after the speed reach P01.15 and delay for
P01.24
0.00~100.00Hz
0: Speed setting (the only detection method in V/F
mode)
Detection of 1: Speed detecting value
P01.16
stopping
speed
When the actual output frequency of the inverter is
lower than P01.15 and the lasting time is beyond
P01.17, the running state ends and the inverter
stops.
Detection If set P01.16 to 1, the feedback frequency is less
P01.17
time of the than or equal to P01.15 and detect in the set time of
feedback
P01.17, the inverter will stop; otherwise the inverter
59
Goodrive300 inverters
Functio
n code
Name
speed
Function codes
Detailed instruction of parameters
Default Modif
value
y
0
○
0
◎
will stop after the set time of P01.17.
Setting range:0.0~100.0s (only valid when
P01.16=1)
When the running command channel is the terminal
control, the system will detect the state of the
running terminal during powering on.
0:The terminal running command is invalid when
Terminal
running
P01.18
protection
when
powering on
powering on. Even the running command is detected
to be valid during powering on, the inverter won’t run
and the system keeps in the protection state until the
running command is canceled and enabled again.
1: The terminal running command is valid when
powering on. If the running command is detected to
be valid during powering on, the system will start the
inverter automatically after the initialization.
Note: this function should be selected with cautions,
or serious result may follow.
The running
frequency is
lower than
the lower
P01.19
limit one
(valid if the
lower limit
frequency is
above 0)
This function code determines the running state of
the inverter when the set frequency is lower than the
lower-limit one.
0: Run at the lower-limit frequency
1: Stop
2: Hibernation
The inverter will coast to stop when the set
frequency is lower than the lower-limit one.if the set
frequency is above the lower limit one again and it
lasts for the time set by P01.20, the inverter will
60
Goodrive300 inverters
Functio
n code
Name
Function codes
Detailed instruction of parameters
Default Modif
value
y
0.0s
○
0
○
1.0s
○
come back to the running state automatically.
This function code determines the Hibernation delay
time. When the running frequency of the inverter is
lower than the lower limit one, the inverter will pause
to stand by.
When the set frequency is above the lower limit one
again and it lasts for the time set by P01.20, the
inverter will run automatically.
Hibernation Note: The time is the total value when the set
P01.20 restore delay frequency is above the lower limit one.
time
Setting range: 0.0~3600.0s (valid when P01.19=2)
This function can enable the inverter start or not after
the power off and then power on.
P01.21
Restart after 0: Ddisable
power off
1: Enable, if the starting need is met, the inverter will
run automatically after waiting for the time defined by
P01.22.
The waiting
P01.22
time of
restart after
The function determines the waiting time before the
automatic running of the inverter when powering off
and then powering on.
power off
61
Goodrive300 inverters
Functio
Name
n code
Function codes
Detailed instruction of parameters
Default Modif
value
y
0.0s
○
0.0s
●
0
●
0
◎
Setting range: 0.0~3600.0s (valid when P01.21=1)
The function determines the brake release after the
P01.23
Start delay
time
running command is given, and the inverter is in a
stand-by state and wait for the delay time set by
P01.23
Setting range: 0.0~60.0s
Delay time of
P01.24
the stop
Setting range: 0.0~100.0 s
speed
Select the output mode at 0Hz.
P01.25
0Hz output 0: Output without voltage
selection 1: Output with voltage
2: Output at DC braking current at stopping
P02 Group
Motor 1
0:Asynchronous motor
P02.00 Motor type 1
1:Synchronous motor
Note: Switch the current motor by the switching
channel of P08.31.
Asynchronou
P02.01
Depend
s motor 1 0.1~3000.0kW
on
rated power
◎
model
Asynchronou
P02.02
s motor 1
rated
0.01Hz~P00.03(the Max. frequency)
50.00H
◎
z
frequency
P02.03
Asynchronou
s motor 1
Depend
1~36000rpm
on
62
◎
Goodrive300 inverters
Functio
n code
P02.04
P02.05
Name
Function codes
Detailed instruction of parameters
model
Asynchronou
Depend
s motor 1 0~1200V
on
rated voltage
model
Asynchronou
Depend
s motor 1 0.8~6000.0A
on
s motor 1
stator
0.001~65.535Ω
on
on
rotor resistor
Depend
0.1~6553.5mH
on
inductance
mutual
Depend
0.1~6553.5mH
on
inductance
s motor 1
non-load
○
model
Asynchronou
P02.10
○
model
Asynchronou
s motor 1
○
model
Asynchronou
P02.09
○
Depend
s motor 1 0.001~65.535Ω
leakage
◎
model
resistor
s motor 1
◎
Depend
Asynchronou
P02.08
y
model
Asynchronou
P02.07
value
rated speed
rated current
P02.06
Default Modif
Depend
0.1~6553.5A
on
○
model
current
Magnetic
saturation
P02.11 coefficient 1 0.0~100.0%
80.0%
◎
68.0%
◎
for the iron
core of AM1
P02.12
Magnetic
0.0~100.0%
saturation
63
Goodrive300 inverters
Functio
n code
Name
Function codes
Detailed instruction of parameters
Default Modif
value
y
57.0%
◎
40.0%
◎
coefficient 2
for the iron
core of AM1
Magnetic
saturation
P02.13 coefficient 3 0.0~100.0%
for the iron
core of AM1
Magnetic
saturation
P02.14 coefficient 4 0.0~100.0%
for the iron
core of AM1
Synchronous
Depend
P02.15 motor 1 rated 0.1~3000.0kW
on
power
◎
model
Synchronous
P02.16 motor 1 rated 0.01Hz~P00.03(the Max. frequency)
frequency
50.00H
◎
z
Synchronous
P02.17
motor 1
number of
1~50
2
◎
poles pairs
Synchronous
Depend
P02.18 motor 1 rated 0~1200V
on
voltage
model
Synchronous
Depend
P02.19 motor 1 rated 0.8~6000.0A
on
current
motor 1
stator
◎
model
Synchronous
P02.20
◎
Depend
0.001~65.535Ω
on
model
resistor
64
○
Goodrive300 inverters
Functio
n code
Name
Function codes
Detailed instruction of parameters
Synchronous
P02.21
motor 1
Direct axis
Default Modif
value
y
Depend
0.1~6553.5mH
on
○
model
inductance
Synchronous
Depend
motor 1
P02.22
Quadrature 0.1~655.35mH
on
axis
○
model
inductance
When P00.15=2, the set value of P02.23 cannot be
updated by autotuning, please count according to
the following method.
The counter-electromotive force constant can be
counted according to the parameters on the name
plate of the motor. There are three ways to count:
1. If the name plate designate the
Synchronous
P02.23
motor 1 Back
EMF
constant
counter-electromotive force constant Ke, then:
E=(Ke*nN*2π)/ 60
2. If the name plate designate the
300
○
counter-electromotive force constant
E’(V/1000r/min), then:
E=E’*nN/1000
3. If the name plate does not designate the above
parameters, then:
E=P/√3*I
In the above formulas: nN is the rated rotation speed,
P is the rated power and I is the rated current.
Setting range: 0~10000
P02.24
Reserved
P02.25
Reserved
Motor 1
P02.26
overload
protection
●
●
0:No protection
1: Common motor (with low speed compensation).
Because the heat-releasing effect of the common
motors will be weakened, the corresponding electric
65
2
◎
Goodrive300 inverters
Functio
Name
n code
Function codes
Detailed instruction of parameters
Default Modif
value
y
100.0%
○
heat protection will be adjusted properly. The low
speed compensation characteristic mentioned here
means reducing the threshold of the overload
protection of the motor whose running frequency is
below 30Hz.
2: Frequency conversion motor (without low speed
compensation) Because the heat-releasing effect of
the specific motors won’t be impacted by the rotation
speed, it is not necessary to adjust the protection
value during low-speed running.
When P02.27=overload protection current of the
motor/rated current of the motor
So, the bigger the overload coefficient is, the shorter
the reporting time of the overload fault is. When the
overload coefficient <110%, there is no overload
protection. When the overload coefficient =116%,
the fault will be reported after 1 hour, when the
P02.27
Motor 1 over overload coefficient=200%, the fault will be reported
after 1 minute.
load
protection
coefficient
Setting range: 20.0%~120.0%
P02.28
Parameter
P02.29
●
Reserved
display of
motor 1
P03 Group
0: Display according to the motor type
1: Display all
Vector control
66
0
●
Goodrive300 inverters
Functio
n code
Name
Function codes
Detailed instruction of parameters
Default Modif
value
y
20.0
○
0.200s
○
5.00Hz
○
20.0
○
0.200s
○
Speed loop The parameters P03.00~P03.05 only apply to vector
P03.00 proportional control mode. Below the switching frequency
gain1
1(P03.02), the speed loop PI parameters are:
Speed loop P03.00 and P03.01. Above the switching frequency
P03.01
P03.02
integral
2(P03.05), the speed loop PI parameters are:
time1
P03.03 and P03.04. PI parameters are gained
Low
according to the linear change of two groups of
switching
parameters. It is shown as below:
frequency
Speed loop
P03.03 proportional
gain 2
Speed loop
P03.04 integral time
2
Setting the proportional coefficient and integral time
of the adjustor and change the dynamic response
performance of vector control speed loop. Increasing
the proportional gain and decreasing the integral
time can speed up the dynamic response of the
speed loop. But too high proportional gain and too
low integral time may cause system vibration and
High
P03.05
switching
overshoot. Too low proportional gain may cause
system vibration and speed static deviation.
PI has a close relationship with the inertia of the
frequency
system. Adjust on the base of PI according to
different loads to meet various demands.
The setting range of P03.00:0~200.0
The setting range of P03.01:0.001~10.000s
The setting range of P03.02:0.00Hz~P03.05
The setting range of P03.03:0~200.0
The setting range of P03.04:0.001~10.000s
67
10.00H
z
○
Goodrive300 inverters
Functio
n code
Name
Function codes
Detailed instruction of parameters
Default Modif
value
y
0
○
100%
○
100%
○
1000
○
1000
○
0
○
The setting range of P03.05:P03.02~P00.03(the
Max. frequency)
P03.06
Speed loop
output filter
0~8( corresponds to 0~28/10ms)
Vector
control
P03.07
electromotio
n slip
compensatio
n coefficient
Vector
control brake
P03.08
Slip compensation coefficient is used to adjust the
slip frequency of the vector control and improve the
speed control accuracy of the system. Adjusting the
parameter properly can control the speed
steady-state error.
Setting range:50%~200%
slip
compensatio
n coefficient
Current loop Note:
P03.09
percentage 1 These two parameters adjust the PI adjustment
coefficient P parameter of the current loop which affects the
dynamic response speed and control accuracy
Current loop
P03.10
integral
coefficient 1
directly. Generally, users do not need to change the
default value.
2 Only apply to the vector control mode without PG
0(P00.00=0).
Setting range:0~65535
This parameter is used to enable the torque control
mode, and set the torque setting means.
0:Torque control is invalid
Torque
P03.11
setting
method
1:Keypad setting torque(P03.12)
2:Analog AI1 setting torque
3:Analog AI2 setting torque
4:Analog AI3 setting torque
5:Pulse frequency HDI setting torque
6: Multi-stage torque setting
7:MODBUS communication setting torque
68
Goodrive300 inverters
Functio
n code
Name
Function codes
Detailed instruction of parameters
Default Modif
value
y
Setting range: -300.0%~300.0%(motor rated current) 50.0%
○
0.000~10.000s
○
8:PROFIBUS communication setting torque
9:Ethernet communication setting torque
10:CAN communication setting torque
Note: 100% of Setting methods 2~10, corresponds
to three times of the rated current of the motor.
Keypad
P03.12
setting
torque
P03.13
Torque given
filter time
Torque
0:keypad setting upper-limit frequency(P03.16 sets
control
P03.14,P03.17 sets P03.15)
forward
1:Analog AI1 setting upper-limit frequency
rotation
P03.14
upper-limit
frequency
setting
source
selection
Torque
control
reverse
P03.15
0.100s
rotation
2:Analog AI2 setting upper-limit frequency
3:Analog AI3 setting upper-limit frequency
0
○
0
○
50.00
○
4:Pulse frequency HDI setting upper-limit frequency
5:Multi-stage setting upper-limit frequency
6:MODBUS communication setting upper-limit
frequency
7:PROFIBUS communication setting upper-limit
frequency
8:Ethernet communication setting upper-limit
upper-limit frequency
frequency 9:CAN communication setting upper-limit frequency
keypad Note:setting method 1~9, 100% corresponds to the
defined value maximum frequency
This function is used to set the upper limit of the
frequency. P03.16 sets the value of P03.14; P03.17
sets the value of P03.15.
P03.16
Torque
control
Setting range:0.00 Hz~P00.03 (the Max. output
frequency)
forward
rotation
upper-limit
frequency
69
Hz
Goodrive300 inverters
Functio
Name
n code
Function codes
Detailed instruction of parameters
Default Modif
value
y
keypad
defined value
Torque
control
reverse
P03.17
rotation
50.00
upper-limit
Hz
○
frequency
keypad
defined value
Electromotio This function code is used to select the
n
torque electromotion and braking torque upper-limit setting
upper-limit source selection.
P03.18
setting
0:Keypad setting upper-limit frequency(P03.20 sets
source
P03.18,P03.21 sets P03.19)
selection
0
○
0
○
180.0%
○
1:Analog AI1 setting upper-limit torque
2:Analog AI2 setting upper-limit torque
3:Analog AI3 setting upper-limit torque
4:Pulse frequency HDI setting upper-limit torque
Braking
torque
upper-limit
P03.19
setting
source
selection
5:MODBUS communication setting upper-limit
torque
6:PROFIBUS communication setting upper-limit
torque
7:Ethernet communication setting upper-limit torque
8:CAN communication setting upper-limit torque
Note:setting method 1~9,100% corresponds to three
times of the motor current.
Electromotio
n
P03.20
torque The function code is used to set the limit of the
upper-limit torque.
keypad
Setting range:0.0~300.0%(motor rated current)
setting
70
Goodrive300 inverters
Functio
n code
Name
Function codes
Detailed instruction of parameters
Default Modif
value
y
180.0%
○
0.3
○
20%
○
100.0%
◎
0.300s
○
1000
○
Braking
torque
P03.21
upper-limit
keypad
setting
Weakening The usage of motor in weakening control.
P03.22
coefficient in
constant
power zone
The lowest Function code P03.22 and P03.23 are effective at
weakening constant power. The motor will enter into the
P03.23
point in
Constant
weakening state when the motor runs at rated
speed. Change the weakening curve by modifying
power zone the weakening control coefficienct. The bigger the
weakening control coefficienct is, the steeper the
weak curve is.
The setting range of P03.22:0.1~2.0
The setting range of P03.23:10%~100%
P03.24
Max. voltage
limit
P03.24 set the Max. Voltage of the inverter, which is
dependent on the site situation.
The setting range:0.0~120.0%
Preactivate the motor when the inverter starts up.
Pre-exciting
P03.25
time
Build up a magnetic field inside the inverter to
improve the torque performance during the starting
process.
The setting time:0.000~10.000s
Weak
P03.26
magnetic
0~8000
Note: P03.24~P03.26 are invalid for vector mode.
71
Goodrive300 inverters
Functio
Name
n code
Function codes
Detailed instruction of parameters
Default Modif
value
y
0
○
0
◎
proportional
gain
Vector
control
P03.27
speed
display
0: Display the actual value
1: Display the setting value
selection
P04 Group
V/F control
These function codes define the V/F curve of
Goodrive300 motor 1 to meet the need of different
loads.
0:Straight line V/F curve;applying to the constant
torque load
1:Multi-dots V/F curve
2:1.3th power low torque V/F curve
3:1.7th power low torque V/F curve
4:2.0th power low torque V/F curve
P04.00
Motor 1V/F Curves 2~4 apply to the torque loads such as fans
curve setting and water pumps. Users can adjust according to the
features of the loads to achieve a best
energy-consuming effect.
5:Customized V/F(V/F separation);on this mode, V
and F can be separated from f and f can be adjusted
through the frequency given channel set by P00.06
or the voltage given channel set by P04.27 to
change the feature of the curve.
Note:Vb in the below picture is the motor rated
voltage and fb is the motor rated frequency.
72
Goodrive300 inverters
Functio
n code
P04.01
Function codes
Name
Detailed instruction of parameters
Motor 1
Torque boost to the output voltage for the features of
torque boost low frequency torque. P04.01 is for the Max. Output
Default Modif
value
y
0.0%
○
20.0%
○
voltage Vb.
P04.02 defines the percentage of closing frequency
of manual torque to fb.
Torque boost should be selected according to the
load. The bigger the load is, the bigger the torque is.
Too big torque boost is inappropriate because the
motor will run with over magnetic, and the current of
the inverter will increase to add the temperature of
the inverter and decrease the efficiency.
When the torque boost is set to 0.0%, the inverter is
Motor 1
automatic torque boost.
P04.02 torque boost Torque boost threshold: on this frequency point, the
close
torque boost is effective, but over this frequency
point, the torque boost is ineffective.
The setting range of
P04.01:0.0%:(automatic)0.1%~10.0%
73
Goodrive300 inverters
Functio
n code
Name
Function codes
Detailed instruction of parameters
Default Modif
value
y
0.00Hz
○
00.0%
○
The setting range of P04.02:0.0%~50.0%
Motor 1V/F
P04.03
Frequency
point 1
Motor 1 V/F
P04.04
Voltage
point 1
Motor 1 V/F
P04.05
00.00H
Frequency
Motor 1 V/F When P04.00 =1, the user can set V//F curve
P04.06 voltage point through P04.03~P04.08.
V/F is generally set according to the load of the
2
Motor 1 V/F
P04.07
Frequency
point 3
○
z
point 2
00.0%
○
motor.
Note:V1<V2<V3,f1<f2<f3. Too high low
frequency voltage will heat the motor excessively or
00.00H
○
z
damage. The inverter may loss the overcurrent
speed or overcurrent protection.
The setting range of P04.03: 0.00Hz~P04.05
The setting range of P04.04:0.0%~110.0%
The setting range of P04.05:P04.03~ P04.07
Motor 1 V/F
P04.08 voltage point
3
The setting range of P04.06:0.0%~110.0%(the rated
voltage of motor 1)
00.0%
○
0.0%
○
The setting range of P04.07:P04.05~ P02.02(the
rated frequency of motor 1) or P04.05~ P02.16(the
rated frequency of motor 1)
The setting range of P04.08:0.0%~110.0%(the rated
voltage of motor 1)
Motor 1 V/F This function code is used to compensate the
P04.09
slip
change of the rotation speed caused by load during
compensatio compensation V/F control to improve the rigidity of
n gain
the motor. It can be set to the rated slip frequency of
74
Goodrive300 inverters
Functio
n code
Name
Function codes
Detailed instruction of parameters
Default Modif
value
y
10
○
10
○
the motor which is counted as below:
△f=fb-n*p/60
Of which, fb is the rated frequency of the motor, its
function code is P02.01; n is the rated rotating speed
of the motor and its function code is P02.02;p is the
pole pair of the motor. 100.0% corresponds to the
rated slip frequency△f.
Setting range:0.0~200.0%
Motor 1 low
P04.10
frequency
vibration
control factor
Motor 1 high
P04.11
frequency
vibration
control factor
Motor 1
P04.12
vibration
In the V/F control mode, current fluctuation may
occur to the motor on some frequency, especially the
motor with big power. The motor can not run stably
or overcurrent may occur. These phenomena can be
canceled by adjusting this parameter.
The setting range of P04.10:0~100
The setting range of P04.11:0~100
The setting range of P04.12:0.00Hz~P00.03(the
30.00
Max. frequency)
control
○
Hz
threshold
P04.13
P04.14
P04.15
Motor 2 V/F This group of parameters defines the V/F setting
curve setting means of Goodrive300 motor 2 to meet the features
Motor 2
P04.16
Motor 2
Note: P04 group contains two sets of V/F
torque
parameters of the motor which cannot display
0.0%
○
20.0%
○
0.00Hz
○
00.0%
○
00.00H
○
simultaneously. Only the selected V/F parameter can
Motor 2V/F be shown. The motor selection can be defined by
frequency terminals function “the shift between motor 1 and
point 1
◎
of different loads. See P04.00~P04.12 for the
torque boost detailed function code instruction.
threshold
0
motor 2”
Motor 2V/F
P04.17 voltage point
1
P04.18
Motor 2V/F
75
Goodrive300 inverters
Functio
n code
Name
Function codes
Detailed instruction of parameters
frequency
Default Modif
value
y
z
point 2
Motor 2V/F
P04.19 voltage point
00.0%
○
2
Motor 2V/F
P04.20
00.00H
frequency
○
z
point 3
Motor 2V/F
P04.21 voltage point
00.0%
○
0.0%
○
10
○
10
○
3
Motor 2 V/F
P04.22
slip
compensatio
n gain
Motor 2 low
P04.23
frequency
vibration
control factor
Motor 2 high
P04.24
frequency
vibration
control factor
Motor 2
P04.25
vibration
In the V/F control mode, current fluctuation may
occur to the motor on some frequency, especially the
motor with big power. The motor can not run stably
or overcurrent may occur. These phenomena can be
canceled by adjusting this parameter.
The setting range of P04.23:0~100
The setting range of P04.24:0~100
The setting range of P04.25:0.00Hz~P00.03(the
30.00
Max. frequency)
control
○
Hz
threshold
Energy-savin
P04.26
g operation
selection
P04.27
0:No operation
1:Automatic energy-saving operation
Motor on the light load conditions, automatically
0
◎
0
○
adjusts the output voltage to save energy
Voltage
Select the output setting channel at V/F curve
Setting
separation.
Channel
0: Keypad setting voltage: the output voltage is
76
Goodrive300 inverters
Functio
n code
Name
Function codes
Detailed instruction of parameters
Default Modif
value
y
100.0%
○
5.0s
○
5.0s
○
100.0%
◎
0.0%
◎
determined by P04.28.
1:AI1 setting voltage ;
2:AI2 setting voltage;
3:AI3 setting voltage;
4:HDI1 setting voltage;
5:Multi-stage speed setting voltage;
6:PID setting voltage;
7:MODBUS communication setting voltage;
8:PROFIBUS communication setting voltage;
9:Ethernet communication setting voltage;
10:CAN communication setting voltage;
Note:100% corresponds to the rated voltage of the
motor.
Keypad
P04.28
setting
voltage
Voltage
P04.29
Voltage
decreasing
time
Maximum
P04.31
output
voltage
Minimum
P04.32
when the voltage setting channel is selected as
“keypad selection”
The setting range:0.0%~100.0%
Voltage increasing time is the time when the inverter
increasing accelerates from the output minimum voltage to the
time
P04.30
The function code is the voltage digital set value
output
output maximum voltage.
Voltage decreasing time is the time when the inverter
decelerates from the output maximum voltage to the
output minimum voltage.
The setting range:0.0~3600.0s
Set the upper and low limit of the output voltage.
The setting range of P04.31:P04.32~100.0%(the
rated voltage of the motor)
The setting range of P04.32:0.0%~ P04.31(the rated
voltage of the motor)
voltage
77
Goodrive300 inverters
Functio
Name
n code
Function codes
Detailed instruction of parameters
Default Modif
value
y
0
◎
1
◎
4
◎
7
◎
S4 terminals 9: External fault input
P05.04
function 10:Increasing frequency setting(UP)
selection 11:Decreasing frequency setting(DOWN)
0
◎
S5 terminals 12:Cancel the frequency change setting
P05.05
function 13:Shift between A setting and B setting
selection 14:Shift between combination setting and A setting
0
◎
0
◎
0
◎
P05 Group
Input terminals
HDI input
P05.00
type
selection
0:HDI is high pulse input. See P05.49~P05.54
1:HDI is switch input. See P05.09
S1 terminals 0: No function
P05.01
function
1: Forward rotation operation
selection
2: Reverse rotation operation
S2 terminals 3: 3-wire control operation
P05.02
function
4: Forward rotation jogging
selection
5: Reverse rotation jogging
S3 terminals 6: Coast to stop
P05.03
function
7: Fault reset
selection
8: Operation pause
S6 terminals
P05.06
function
selection
S7 terminals
P05.07
function
selection
15:Shift between combination setting and B setting
16:Multi-stage speed terminal 1
17:Multi-stage speed terminal 2
18:Multi-stage speed terminal 3
19:Multi- stage speed terminal 4
20:Multi- stage speed pause
78
Goodrive300 inverters
Functio
n code
Function codes
Name
Default Modif
Detailed instruction of parameters
value
y
0
◎
0
◎
0x000
○
0.010s
○
S8 terminals 21:ACC/DEC time option1
P05.08
function
22:ACC/DEC time option2
selection
23:Simple PLC stop reset
24:Simple PLC pause
25:PID control pause
26:Traverse Pause(stop at the current frequency)
27:Traverse reset(return to the center frequency)
28:Counter reset
29:Torque control prohibition
30:ACC/DEC prohibition
31:Counter trigger
HDI terminal 32:Length reset
P05.09
function
33:Cancel the frequency change setting temporarily
selection
34:DC brake
35:Shift the motor 1 into motor 2
36:Shift the command to the keypad
37:Shift the command to the terminals
38:Shift the command to the communication
39:Pre-magnetized command
40:Clear the power
41:Keep the power
42~63:Reserved
The function code is used to set the polarity of the
input terminals.
Set the bit to 0, the input terminal is anode.
Polarity
P05.10
selection of
the input
terminals
Set the bit to 1, the input terminal is cathode.
BIT0
BIT2
BIT3
BIT4
BIT5
S1
S2
S3
S4
S5
BIT6
BIT7
BIT8
BIT9
S6
S7
S8
HDI
The setting range:0x000~0x1FF
P05.11
ON-OFF
filter time
Set the sample filter time of S1~S8 and HDI
terminals. If the interference is strong, increase the
parameter to avoid the disoperation.
79
Goodrive300 inverters
Functio
n code
Name
Function codes
Detailed instruction of parameters
Default Modif
value
y
0
◎
0
◎
0.000~1.000s
Enable the input function of virtual terminals at the
communication mode.
0:Virtual terminals is invalid
Virtual
P05.12
terminals
setting
1:MODBUS communication virtual terminals are
valid
2:PROFIBUS communication virtual terminals are
valid
3: Ethernet communication virtual terminals are valid
4: CAN communication virtual terminals are valid
Set the operation mode of the terminals control
0:2-wire control 1, comply the enable with the
direction. This mode is widely used. It determines
the rotation direction by the defined FWD and REV
terminals command.
Terminals
P05.13
control
running
mode
1:2-wire control 2;Separate the enable from the
direction. FWD defined by this mode is the enabling
ones. The direction depends on the state of the
defined REV.
80
Goodrive300 inverters
Functio
n code
Name
Function codes
Detailed instruction of parameters
2:3-wire control 1; Sin is the enabling terminal on this
mode, and the running command is caused by FWD
and the direction is controlled by REV.
Sin is
natural closed.
3:3-wire control 2; Sin is the enabling terminal on this
mode, and the running command is caused by SB1
or SB3 and both of them control the running
direction.NC SB2 generates the stop command.
Note: for the 2-wire running mode, when FWD/REV
terminal is effective, the inverter stop because of the
stopping command from other sources, even the
control terminal FWD/REV keeps effective; the
inverter won’t work when the stopping command is
canceled. Only when FWD/REV is relaunched, the
inverter can start again. For example, the effective
81
Default Modif
value
y
Goodrive300 inverters
Functio
n code
Name
Function codes
Detailed instruction of parameters
Default Modif
value
y
0.000s
○
0.000s
○
0.000s
○
0.000s
○
0.000s
○
0.000s
○
0.000s
○
0.000s
○
0.000s
○
STOP/RSTstop when PLC signal cycles stop,
fixed-length stop and terminal control (see P07.04).
S1 terminal
P05.14 switching-on
delay time
S1
P05.15
terminal
switching-off
delay time
S2 terminal
The function code defines the corresponding delay
time of electrical level of the programmable terminals
from switching on to switching off.
P05.16 switching-on
delay time
S2
P05.17
terminal
switching-off
delay time
S3 terminal
P05.18 switching-on
delay time
S3
P05.19
terminal
switching-off
delay time
S4 terminal
P05.20 switching-on
delay time
Setting range:0.000~50.000s
S4
P05.21
terminal
switching-off
delay time
P05.22
S5
82
Goodrive300 inverters
Functio
n code
Name
Function codes
Detailed instruction of parameters
Default Modif
value
y
0.000s
○
0.000s
○
0.000s
○
0.000s
○
0.000s
○
0.000s
○
0.000s
○
terminal
switching-on
delay time
S5
P05.23
terminal
switching-off
delay time
S6
P05.24
terminal
switching-on
delay time
S6
P05.25
terminal
switching-off
delay time
S7
P05.26
terminal
switching-on
delay time
S7
P05.27
terminal
switching-off
delay time
S8
P05.28
terminal
switching-on
delay time
S8
P05.29
terminal
switching-off
delay time
83
Goodrive300 inverters
Functio
n code
Name
Function codes
Detailed instruction of parameters
Default Modif
value
y
0.000s
○
0.000s
○
0.00V
○
0.0%
○
10.00V
○
100.0%
○
0.100s
○
0.00V
○
0.0%
○
10.00V
○
100.0%
○
HDI
P05.30
terminal
switching-on
delay time
HDI
P05.31
terminal
switching-off
delay time
P05.32
Lower limit of The function code defines the relationship between
AI1
the analog input voltage and its corresponding set
Correspondi value. If the analog input voltage beyond the set
P05.33
ng setting of minimum or maximum input value, the inverter will
the lower
count at the minimum or maximum one.
limit of AI1 When the analog input is the current input, the
P05.34
Upper limit of corresponding voltage of 0~20mA is 0~10V.
AI1
In different cases, the corresponding rated value of
Correspondi 100.0% is different. See the application for detailed
P05.35
ng setting of information.
the upper The figure below illustrates different applications:
limit of AI1
P05.36
P05.37
AI1 input
filter time
Lower limit of
AI2
Correspondi
P05.38
ng setting of
the lower
limit of AI2
P05.39
Upper limit of
AI2
P05.40 Correspondi
Input filter time: this parameter is used to adjust the
sensitivity of the analog input. Increasing the value
properly can enhance the anti-interference of the
analog, but weaken the sensitivity of the analog
input.
84
Goodrive300 inverters
Functio
n code
Name
Function codes
Detailed instruction of parameters
Default Modif
value
y
0.100s
○
-10.00V
○
ng setting of Note: Analog AI1 and AI2 can support 0~10V or
the upper 0~20mA input, when AI1 and AI2 selects 0~20mA
limit of AI2 input, the corresponding voltage of 20mA is 5V. AI3
P05.41
P05.42
AI2 input
can support the output of -10V~+10V.
filter time
The setting range of P05.32:0.00V~P05.34
Lower limit of The setting range of P05.33:-100.0%~100.0%
AI3
The setting range of P05.34:P05.32~10.00V
Correspondi The setting range of P05.35:-100.0%~100.0%
P05.43
ng setting of The setting range of P05.36:0.000s~10.000s
the lower
The setting range of P05.37:0.00V~P05.39
-100.0
○
%
limit of AI3 The setting range of P05.38:-100.0%~100.0%
P05.44
Middle value The setting range of P05.39:P05.37~10.00V
The setting range of P05.40:-100.0%~100.0%
of AI3
Correspondi
P05.45
ng middle
setting of
AI3
P05.46
Upper limit of
AI3
Correspondi
P05.47
ng setting of
0.00V
○
0.0%
○
10.00V
○
100.0%
○
0.100s
○
0
◎
The setting range of P05.41:0.000s~10.000s
The setting range of P05.42:-10.00V~P05.44
The setting range of P05.43:-100.0%~100.0%
The setting range of P05.44:P05.42~P05.46
The setting range of P05.45:-100.0%~100.0%
The setting range of P05.46:P05.44~10.00V
The setting range of P05.47:-100.0%~100.0%
The setting range of P05.48:0.000s~10.000s
the upper
limit of AI3
P05.48
AI3 input
filter time
HDI
high-speed
P05.49
pulse input
function
selection
The function selection when HDI terminals is
high-speed pulse input
0:Frequency setting input, frequency setting source
1:Counter input, high-speed pulse counter input
terminals
2:Length counting input, length counter input
85
Goodrive300 inverters
Functio
Name
n code
Function codes
Detailed instruction of parameters
Default Modif
value
y
terminals
Lower limit
0.00KH
P05.50 frequency of 0.00 KHz ~ P05.52
○
z
HDI
Correspondi
ng setting of
P05.51
HDI low
-100.0%~100.0%
0.0%
○
frequency
setting
Upper limit
50.00K
P05.52 frequency of P05.50 ~50.00KHz
○
Hz
HDI
Correspondi
ng setting of
P05.53
upper limit -100.0%~100.0%
100.0%
○
0.100s
○
0
◎
0
○
frequency of
HDI
HDI
P05.54
frequency
input filter
0.000s~10.000s
time
P06 Group
Output terminals
The function selection of the high-speed pulse output
terminals.
0: Open collector pole high speed pulse output: The
P06.00 HDO output
Max.pulse frequency is 50.0kHz. See
P06.27~P06.31 for detailed information of the
related functions.
1: Open collector pole output. See P06.02 for
detailed information of the related functions.
P06.01
Y output
0:Invalid
86
Goodrive300 inverters
Functio
n code
Name
Function codes
Detailed instruction of parameters
P06.02 HDO output 1:In operation
P06.03
Relay RO1 2:Forward rotation operation
output
3:Reverse rotation operation
Default Modif
value
y
0
○
1
○
5
○
00
○
4: Jogging operation
5:The inverter fault
6:Frequency degree test FDT1
7:Frequency degree test FDT2
8:Frequency arrival
9:Zero speed running
10:Upper limit frequency arrival
11:Lower limit frequency arrival
12:Ready for operation
13:Pre-magnetizing
14:Overload pre-alarm
15: Underload pre-alarm
Relay RO2
P06.04
output
16:Completion of simple PLC stage
17:Completion of simple PLC cycle
18:Setting count value arrival
19:Defined count value arrival
20:External fault valid
21:Length arrival
22:Running time arrival
23:MODBUS communication virtual terminals output
24:PROFIBUS communication virtual terminals
output
25: Ethernet communication virtual terminals output
26: CAN communication virtual terminals output
27~30: Reserved
Polarity
P06.05
The function code is used to set the pole of the
selection of output terminal.
output
terminals
When the current bit is set to 0, input terminal is
positive.
87
Goodrive300 inverters
Functio
n code
Function codes
Name
Detailed instruction of parameters
Default Modif
value
y
0.000s
○
0.000s
○
0.000s
○
0.000s
○
0.000s
○
0.000s
○
0.000s
○
0.000s
○
When the current bit is set to 1, input terminal is
negative.
BIT0
BIT1
BIT2
BIT3
Y
HDO
RO1
RO2
Setting range:00~0F
Y
P06.06 switching-on
delay time
Y
P06.07 switching-off The function code defines the corresponding delay
delay time time of the electrical level change during the
HDO
programmable terminal switching on and off.
P06.08 switching-on
delay time
HDO
P06.09 switching-off
delay time
RO1
P06.10 switching-on
delay time
RO1
P06.11 switching-off
delay time The setting range :0.000~50.000s
RO2
Note: P06.08 and P06.08 are valid only when
P06.12 switching-on P06.00=1.
delay time
RO2
P06.13 switching-off
delay time
P06.14
AO1 output 0:Running frequency
0
○
P06.15
AO2 output 1:Set frequency
0
○
88
Goodrive300 inverters
Functio
n code
Name
Function codes
Detailed instruction of parameters
Default Modif
value
y
0
○
0.0%
○
0.00V
○
2:Ramp reference frequency
3:Running rotation speed
4:Output current (relative to the rated current of the
inverter)
5:Output current(relative to the rated current of the
motor)
6:Output voltage
7:Output power
8:Set torque value
9:Output torque
10:Analog AI1 input value
11:Analog AI2 input value
HDO
P06.16
high-speed
pulse output
selection
12:Analog AI3 input value
13:High speed pulse HDI input value
14:MODBUS communication set value 1
15:MODBUS communication set value 2
16:PROFIBUS communication set value 1
17:PROFIBUS communication set value 2
18: Ethernet communication set value 1
19: Ethernet communication set value 2
20: CAN communication set value 1
21: CAN communication set value 2
22:Torque current(relative to the rated current of the
motor)
23:Pre-magnetizing current(relative to the rated
current of the motor)
24:Reserved
P06.17
Lower limit of The above function codes define the relative
AO1 output relationship between the output value and analog
output. When the output value exceeds the range of
set maximum or minimum output, it will count
P06.18 Correspondi
ng AO1
output to the
according to the low-limit or upper-limit output.
89
Goodrive300 inverters
Functio
n code
Function codes
Name
Detailed instruction of parameters
Default Modif
value
y
100.0%
○
10.00V
○
0.000s
○
0.0%
○
0.00V
○
100.0%
○
10.00V
○
0.000s
○
0.00%
○
0.0kHz
○
100.0%
○
lower limit When the analog output is current output, 1mA
P06.19
Upper limit of equals to 0.5V.
AO1 output In different cases, the corresponding analog output
The
of 100% of the output value is different. See each
correspondin application for detailed information.
P06.20 g AO1 output
A
O
10 V (20 m A )
to the upper
limit
P06.21
P06.22
P06.23
AO1 output
filter time
0 .0 %
1 00.0%
Lower limit of Setting range of P06.18 0.00V~10.00V
AO2 output Setting range of P06.19 P06.17~100.0%
Correspondi Setting range of P06.20 0.00V~10.00V
ng AO2
Setting range of P06.21 0.000s~10.000s
output to the Setting range of P06.22 0.0%~P06.24
lower limit Setting range of P06.23 0.00V~10.00V
P06.24
Upper limit of Setting range of P06.24 P06.22~100.0%
AO2 output Setting range of P06.25 0.00V~10.00V
Correspondi Setting range of P06.26 0.000s~10.000s
P06.25
ng AO2
Setting range of P06.27 0.0%~P06.29
output to the Setting range of P06.28 0.00~50.00kHz
upper limit Setting range of P06.29 P06.27~100.0%
P06.26
P06.27
AO2 output Setting range of P06.30 0.00~50.00kHz
filter time
Setting range of P06.31 0.000s~10.000s
Lower limit of
HDO output
Correspondi
P06.28
ng HDO
output to the
lower limit
P06.29 Upper limit of
90
Goodrive300 inverters
Functio
Name
n code
Function codes
Detailed instruction of parameters
Default Modif
value
y
HDO output
Correspondi
ng HDO
50.00k
output to the
Hz
P06.30
○
upper limit
P06.31
HDO output
0.000s
○
0
○
0
◎
filter time
P07 Group
Human-Machine Interface
0~65535
The password protection will be valid when setting
any non-zero number.
00000: Clear the previous user’s password, and
make the password protection invalid.
After the set user’s password becomes valid, if the
password is incorrect, users cannot enter the
parameter menu. Only correct password can make
User’s
P07.00
the user check or modify the parameters. Please
password remember all users’ passwords.
Retreat editing state of the function codes and the
password protection will become valid in minute. If
the valid password is available, press PRG/ESCto
enter into the editing state of the function codes, and
then “0.0.0.0.0” will be displayed. Unless input right
password, the operator can not enter into it.
Note: restoring to the default value can clear the
password, please use it with caution.
The function code determines the manner of
Parameter
P07.01
copy
parameters copy.
0:No operation
1:Upload the local function parameter to the keypad
2:Download the keypad function parameter to local
91
Goodrive300 inverters
Functio
n code
Name
Function codes
Detailed instruction of parameters
Default Modif
value
y
1
◎
address(including the motor parameters)
3:Download the keypad function parameter to local
address (excluding the motor parameter of P02, P12
group)
4:Download the keypad function parameters to local
address (only for the motor parameter of P02,P12
group)
Note: After completing the 1~4 operations, the
parameter will come back to 0 automatically; the
function of upload and download excludes the
factory parameters of P29.
0:No function
1: Jogging running. Press QUICK/JOG to realize the
jogging running.
2: Shift the display state by the shifting key. Press
QUICK/JOGto shift the displayed function code from
right to left.
3: Shift between forward rotations and reverse
rotations. Press QUICK/JOG to shift the direction of
the frequency commands. This function is only valid
QUICK/JOG in the keypad commands channels.
P07.02
function
4: Clear UP/DOWN settings. Press QUICK/JOG to
selection
clear the set value of UP/DOWN.
5: Coast to stop. Press QUICK/JOG to coast to stop.
6: Shift the given manner of running commands.
Press QUICK/JOG to shift the given manner of
running commands.
7:Quick commission mode(committee according to
the non-factory parameter)
Note: Press QUICK/JOGto shift between forward
rotation and reverse rotation, the inverter does not
remember the state after shifting during powering off.
92
Goodrive300 inverters
Functio
n code
Name
Function codes
Detailed instruction of parameters
Default Modif
value
y
0
○
0
○
0x03FF
○
The inverter will run in the running direction set
according to parameter P00.13 during next powering
on.
QUICK/JOG When P07.06=6, set the shifting sequence of
the shifting running command channels.
sequence 0:Keypad control→terminals control
P07.03
selection of →communication control
running
1:Keypad control←→terminals control
command 2:Keypad control←→communication control
channel
3:Terminals control←→communication control
STOP/RST is an effective selection key of the stop
function. STOP/RST is effective in any state for the
STOP/RST
P07.04
stop function
fault reset.
0:Only valid for the panel control
1:Both valid for panel and terminals control
2:Both valid for panel and communication control
3:Valid for all control modes
0x0000~0xFFFF
BIT0:running frequency (Hz on)
BIT1:set frequency(Hz flickering)
BIT2:bus voltage (Hz on)
BIT3:output voltage(V on)
The
BIT4:output current(A on)
parameter BIT5:running rotation speed (rpm on)
P07.05 selection 1 in BIT6:output power(% on)
the running BIT7:output torque(% on)
state
BIT8:PID reference(% flickering)
BIT9:PID feedback value(% on)
BIT10:input terminals state
BIT11:output terminals state
BIT12:torque set value(% on)
BIT13:pulse counter value
93
Goodrive300 inverters
Functio
n code
Name
Function codes
Detailed instruction of parameters
Default Modif
value
y
BIT14:length value
BIT15:PLC and the current stage in multi-stage
speed
0x0000~0xFFFF
BIT0: analog AI1 value (V on)
BIT1: analog AI2 value (V on)
The
parameter 2
P07.06
in running
state
BIT2: analog AI3 value (V on)
BIT3: high speed pulse HDI frequency
BIT4: motor overload percentage (% on)
0x0000
BIT5: the inverter overload percentage (% on)
BIT6: ramp frequency given value(Hz on)
BIT7: linear speed
BIT8: AC inlet current (A on)
BIT9~15:reserved
0x0000~0xFFFF
BIT0:set frequency(Hz on, frequency flickering
slowly)
BIT1:bus voltage (V on)
BIT2:input terminals state
BIT3:output terminals state
BIT4:PID reference (% flickering)
The
BIT5:PID feedback value(% flickering)
parameter in BIT6:torque reference(% flickering)
P07.07
the stop
BIT7:analog AI1 value(V on)
state
BIT8:analog AI2 value(V on)
BIT9: analog AI3 value(V on)
BIT10:high speed pulse HDI frequency
BIT11:PLC and the current stage in multi-stage
speed
BIT12:pulse counters
BIT13:length value
BIT14~BIT15:reserved
94
0x00FF
○
Goodrive300 inverters
Functio
n code
P07.08
Name
Detailed instruction of parameters
Frequency 0.01~10.00
coefficient Displayed frequency=running frequency* P07.08
Rotation
P07.09
Function codes
speed
Default Modif
value
y
1.00
○
100.0%
○
1.0%
○
0.1~999.9%
Mechanical rotation speed =120*displayed running
coefficient frequency×P07.09/motor pole pairs
P07.10
Linear speed 0.1~999.9%
coefficient Linear speed= Mechanical rotation speed×P07.10
Rectifier
P07.11
bridge
-20.0~120.0℃
●
-20.0~120.0℃
●
1.00~655.35
●
module
temperature
Converter
P07.12
module
temperature
P07.13
Software
version
Local
●
P07.14 accumulative 0~65535h
running time
High bit of
P07.15
power
consumption
Low bit of
P07.16
power
Display the power used by the inverter.
●
The power consumption of the inverter
=P07.15*1000+P07.16
Setting range of P07.15: 0~65535°(*1000)
Setting range of P07.16: 0.0~999.9°
●
consumption
P07.17
●
Reserved Reserved
The rated
●
P07.18 power of the 0.4~3000.0kW
inverter
P07.19
The rated
voltage of
●
50~1200V
95
Goodrive300 inverters
Functio
n code
Name
Function codes
Detailed instruction of parameters
Default Modif
value
y
the inverter
The rated
●
P07.20 current of the 0.1~6000.0A
inverter
P07.21
Factory bar
0x0000~0xFFFF
●
0x0000~0xFFFF
●
0x0000~0xFFFF
●
0x0000~0xFFFF
●
0x0000~0xFFFF
●
0x0000~0xFFFF
●
code 1
P07.22
Factory bar
code 2
P07.23
P07.24
P07.25
P07.26
Factory bar
code 3
Factory bar
code 4
Factory bar
code 5
Factory bar
code 6
0:No fault
1:IGBT U phase protection(OUt1)
2:IGBT V phase protection(OUt2)
3:IGBT W phase protection(OUt3)
4:OC1
P07.27
Current fault
type
●
5:OC2
6:OC3
7:OV1
8:OV2
9:OV3
10:UV
96
Goodrive300 inverters
Functio
n code
Name
Function codes
Detailed instruction of parameters
Default Modif
value
y
11:Motor overload(OL1)
12:The inverter overload(OL2)
13:Input side phase loss(SPI)
14:Output side phase loss(SPO)
P07.28
Previous
15:Overheat of the rectifier module(OH1)
fault type
16:Overheat fault of the inverter module(OH2)
●
17:External fault(EF)
18:485 communication fault(CE)
19:Current detection fault(ItE)
20:Motor antotune fault(tE)
P07.29
P07.30
P07.31
Previous 2 21:EEPROM operation fault(EEP)
fault type
●
22:PID response offline fault(PIDE)
Previous 3 23:Braking unit fault(bCE)
fault type
●
24:Running time arrival(END)
Previous 4 25:Electrical overload(OL3)
fault type
●
26:Panel communication fault(PCE)
27:Parameter uploading fault (UPE)
28:Parameter downloading fault(DNE)
29:Profibus communication fault(E-DP)
30:Ethernet communication fault(E-NET)
P07.32
Previous 5 31:CAN communication fault(E-CAN)
fault type
●
32:Grounding short circuit fault 1(ETH1)
33:Grounding short circuit fault 2(ETH2)
34:Speed deviation fault(dEu)
35:Maladjustment(STu)
36: Undervoltage fault(LL)
Running
P07.33 frequency at
0.00Hz
current fault
Ramp
P07.34
reference
0.00Hz
frequency at
97
●
Goodrive300 inverters
Functio
n code
Name
Function codes
Detailed instruction of parameters
Default Modif
value
y
current fault
Output
P07.35
voltage at
0V
the current
fault
Output
P07.36
0.0A
current at
current fault
Bus voltage
P07.37
at current
0.0V
fault
The Max.
P07.38
temperature
0.0℃
at current
fault
Input
P07.39
terminals
0
●
0
●
0.00Hz
●
0.00Hz
●
0V
●
state at
current fault
Output
P07.40
terminals
state at
current fault
Running
P07.41 frequency at
previous fault
Ramp
P07.42
reference
frequency at
previous fault
P07.43
Output
98
Goodrive300 inverters
Functio
n code
Name
Function codes
Detailed instruction of parameters
Default Modif
value
y
0.0A
●
0.0V
●
0.0℃
●
0
●
0
●
0.00Hz
●
0.00Hz
●
0V
●
voltage at
previous fault
The output
P07.44
current at
previous fault
Bus voltage
P07.45
at previous
fault
The Max.
P07.46
temperature
at previous
fault
Input
P07.47
terminals
state at
previous fault
Output
P07.48
terminals
state at
previous fault
Runnig
P07.49
frequency at
previous 2
fault
Output
P07.50
voltage at
previous 2
faults
Output
P07.51
current at
previous 2
99
Goodrive300 inverters
Functio
Name
n code
Function codes
Detailed instruction of parameters
Default Modif
value
y
0.0A
●
0.0V
●
0.0℃
●
0
●
0
●
faults
Output
P07.52
current at
previous 2
fault
Bus voltage
P07.53 at previous 2
fault
The Max.
P07.54
temperature
at previous 2
fault
Input
terminals
P07.55
state at
previous 2
fault
Output
terminals
P07.56
state at
previous 2
fault
P08 Group
Enhanced function
See P00.11 and P00.12 for detailed definition.
P08.00
P08.01
ACC time 2 Goodrive300 series define four groups of ACC/DEC
Depend
on
time which can be selected by P5 group. The first
model
group of ACC/DEC time is the factory default one.
Depend
DEC time 2 Setting range:0.0~3600.0s
on
○
○
model
P08.02
ACC time 3
Depend
100
on
○
Goodrive300 inverters
Functio
n code
Name
Function codes
Detailed instruction of parameters
Default Modif
value
y
model
Depend
P08.03
DEC time 3
on
○
model
Depend
P08.04
ACC time 4
on
○
model
Depend
P08.05
DEC time 4
on
○
model
P08.06
Jogging
frequency
P08.07
Jogging ACC
time
This parameter is used to define the reference
frequency during jogging.
P08.09
Jogging DEC
time
Jumping
inverter runs from 0Hz to the Max. Frequency.
The jogging DEC time means the time needed if the
P08.10
P08.11
0Hz.
on
When the set frequency is in the range of jumping
○
model
Depend
on
Setting range:0.0~3600.0s
frequency 1 frequency, the inverter will run at the edge of the
Jumping
○
The jogging ACC time means the time needed if the Depend
inverter goes from the Max. Frequency (P0.03) to
P08.08
5.00Hz
Setting range: 0.00Hz ~P00.03(the Max. frequency)
○
model
0.00Hz
○
0.00Hz
○
0.00Hz
○
0.00Hz
○
0.00Hz
○
jumping frequency.
frequency The inverter can avoid the mechanical resonance
range 1
point by setting the jumping frequency. The inverter
Jumping
can set three jumping frequency. But this function
frequency 2 will be invalid if all jumping points are 0.
Jumping
P08.12
frequency
range 2
P08.13
Jumping
frequency 3
101
Goodrive300 inverters
Functio
n code
Name
Function codes
Detailed instruction of parameters
Default Modif
value
y
0.00Hz
○
0.0%
○
0.0%
○
5.0s
○
5.0s
○
Jumping
P08.14
frequency
range 3
Setting range: 0.00~P00.03(the Max. frequency)
P08.15
P08.16
Traverse
This function applies to the industries where traverse
range
and convolution function are required such as textile
Sudden
and chemical fiber.
jumping
The traverse function means that the output
frequency frequency of the inverter is fluctuated with the set
range
P08.17
Traverse
frequency as its center. The route of the running
frequency is illustrated as below, of which the
boost time traverse is set by P08.15 and when P08.15 is set as
0, the traverse is 0 with no function.
Traverse
P08.18
declining
time
Traverse range:The traverse running is limited by
upper and low frequency.
The traverse range relative to the center frequency:
traverse range AW=center frequency×traverse
range P08.15.
Sudden jumping frequency=traverse range AW×
sudden jumping frequency range P08.16. When run
at the traverse frequency, the value which is relative
102
Goodrive300 inverters
Functio
n code
Name
Function codes
Detailed instruction of parameters
Default Modif
value
y
0m
○
0m
●
1
○
to the sudden jumping frequency.
The raising time of the traverse frequency:The time
from the lowest point to the highest one.
The declining time of the traverse frequency :The
time from the highest point to the lowest one.
The setting range of P08.15: 0.0~100.0%(relative to
the set frequency)
The setting range of P08.16: 0.0~50.0%(relative to
the traverse range)
The setting range of P08.17: 0.1~3600.0s
The setting range of P08.18: 0.1~3600.0s
P08.19
Setting
The function codes of setting length, actual length
length
and unit pulse are mainly used to control the fixed
P08.20 Actual length length.
P08.21
P08.22
Pulse per The length is counted by the pulse signal of HDI
rotation
Alxe
terminals input and the HDI terminals are needed to
set as the length counting input.
perimeter Actual length=the length counting input pulse /unit
P08.23 Length ratio pulse
When the actual length P08.20 exceeds the setting
10.00c
○
m
1.000
○
1.000
○
0
○
0
○
length P08.19, the multi-function digital output
terminals will output ON.
Length
P08.24
Setting range of P08.19: 0~65535m
correcting Setting range of P08.20:0~65535m
coefficient Setting range of P08.21:1~10000
Setting range of P08.22:0.01~100.00cm
Setting range of P08.23:0.001~10.000
Setting range of P08.24:0.001~1.000
Setting
P08.25
counting
value
P08.26
The counter works by the input pulse signals of the
HDI terminals.
When the counter achieves a fixed number, the
Reference multi-function output terminals will output the signal
103
Goodrive300 inverters
Functio
n code
Function codes
Name
Detailed instruction of parameters
counting
of “fixed counting number arrival” and the counter go
value
Default Modif
value
y
0m
○
0
○
1.0s
○
0.00Hz
○
on working; when the counter achieves a setting
number, the multi-function output terminals will
output the signal of “setting counting number arrival”,
the counter will clear all numbers and stop to recount
before the next pulse.
The setting counting value P08.26 should be no
more than the setting counting value P08.25.
The function is illustrated as below:
Setting range of P08.25:P08.26~65535
Setting range of P08.26:0~P08.25
Pre-set running time of the inverter. When the
Set running
P08.27
time
accumulative running time achieves the set time, the
multi-function digital output terminals will output the
signal of “running time arrival”.
Setting range:0~65535m
P08.28
Fault reset The time of the fault reset: the inverter set the fault
times
reset time by selecting this function. If the reset time
exceeds this set value, the inverter will stop for the
fault and wait to be repaired.
Interval time The interval time of the fault reset: the interval
P08.29 of automatic between the time when the fault occurs and the time
fault reset when the reset action occurs.
Setting range of P08.28:0~10
Setting range of P08.29:0.1~3600.0s
Frequency The output frequency of the inverter changes as the
P08.30
decreasing load. And it is mainly used to balance the power
ratio of the when several inverters drive one load.
104
Goodrive300 inverters
Functio
n code
Name
dropping
Function codes
Detailed instruction of parameters
Default Modif
value
y
0
◎
Setting range:0.00~50.00Hz
control
Goodrive300 supports the shift between two motors.
This function is used to select the shifting channel.
LED ones: shifting channel
The shifting
channel
P08.31
between
motor 1 and
motor 2
0: terminal shifting; digital terminal is 35
1: MODBUS communication shifting
2: PROFIBUS communication shifting
3: Ethernet communication shifting
4: CAN communication shifting
LED tens: shifting enabling in operation
0: Disabled
1: Enabled
0x00~0x14
FDT1
P08.32
corresponding frequency of FDT electrical level, the
level
multi-function digital output terminals will output the
detection
P08.33
When the output frequency exceeds the
electrical
50.00H
○
z
signal of “frequency level detect FDT” until the output
value
frequency decreases to a value lower than (FDT
FDT1
electrical level—FDT retention detection value) the
retention
corresponding frequency, the signal is invalid. Below
detection
is the ware form diagram:
5.0%
○
value
FDT2
electrical
P08.34
50.00H
level
○
z
detection
value
FDT2
P08.35
retention
detection
5.0%
Setting range of P08.32: 0.00Hz~P00.03(the Max.
105
○
Goodrive300 inverters
Functio
n code
Name
value
Function codes
Detailed instruction of parameters
Default Modif
value
y
0.00Hz
○
0
○
frequency)
Setting range of P08.33: 0.0~100.0%(FDT1
electrical level)
Setting range of P08.34: 0.00~P00.03(the Max.
frequency)
Setting range of P08.35: 0.0~100.0%(FDT2
electrical level)
When the output frequency is among the below or
above the range of the set frequency, the
multi-function digital output terminal will output the
signal of “frequency arrival”, see the diagram below
for detailed information:
Frequency
P08.36
arrival
detection
value
The setting range:0.00Hz~P00.03(the Max.
frequency)
This parameter is used to control the internal braking
P08.37
Energy
pipe inside the inverter.
braking
0:Disable
enable
1:Enable
Note:Only applied to internal braking pipe.
Threshold
P08.38
voltage
After set the original bus voltage to brake the
220V
energy, brake the load by adjusting the voltage
voltage:3
appropriately. The factory changes with voltage
80.0V
106
○
Goodrive300 inverters
Functio
n code
Function codes
Name
Detailed instruction of parameters
level.
Default Modif
value
y
380V
The setting range:200.0~2000.0V
voltage:7
00.0V
660V
voltage:1
120.0V
Cooling fan
P08.39
running
0:Rated running mode
1:The fan keeps on running after power on
0
○
mode
LED ones: PWM mode selection
◎
0: PWM mode 1, three-phase modulation and
two-modulation
1: PWM mode 2, three-phase modulation
LED tens: low-speed carrier frequency limit mode
PWM
P08.40
selection
0: Low-speed carrier frequency limit mode 1, the
carrier frequency will limit to 2k if it exceeds 2k at low
01
speed
1:Low-speed carrier frequency limit mode 2, the
carrier frequency will limit to 4k if it exceeds 4k at low
speed
2: No limit
Over
P08.41 commission
0:Invalid
1:Valid
1
◎
0x0000
○
selection
0x000~0x1223
LED ones:frequency enable selection
0:Both ∧/∨ keys and digital potentiometer
P08.42
Keypad data adjustments are effective
control
1:Only ∧/∨ keys adjustments is
effective
2:Only digital potentiometer adjustments is effective
3:Neither ∧/∨ keys nor digital potentiometer
adjustments are effective
107
Goodrive300 inverters
Functio
n code
Name
Function codes
Detailed instruction of parameters
Default Modif
value
y
0.10s
○
0x000
○
LED tens: frequency control selection
0:Only effective when P00.06=0 or P00.07=0
1:Effective for all frequency setting manner
2:Ineffective for multi-stage speed when multi-stage
speed has the priority
LED hundreds: action selection during stopping
0:Setting is valid
1:Valid during running, cleared after stopping
2:Valid during running, cleared after receiving the
stop command
LED thousands: ∧/∨ keys and digital
potentiometer Integral function
0:The Integral function is valid
1:The Integral function is invalid
Keypad data
P08.43
potentiomete
r integral
0.01~10.00s
ratio
0x00~0x221
LED ones: frequency control selection
0:UP/DOWN terminals setting effective
1:UP/DOWN terminals setting ineffective
LED tens: frequency control selection
UP/DOWN
P08.44
terminals
control
0:Only effective when P00.06=0 or P00.07=0
1:All frequency means are effective
2:When the multi-stage are priority, it is ineffective to
the multi-stage
LED hundreds: action selection when stop
0:Setting effective
1:Effective in the running, clear after stop
2:Effective in the running, clear after receiving the
stop commands
108
Goodrive300 inverters
Functio
n code
Name
Function codes
Detailed instruction of parameters
Default Modif
value
y
UP terminals
P08.45
frequency
changing
0.50
0.01~50.00Hz/s
○
Hz/s
ratio
DOWN
terminals
P08.46
0.50
frequency 0.01~50.00 Hz/s
○
Hz/s
changing
ratio
0x000~0x111
LED ones:The action selection when the digital
adjusting the frequency is off.
0:Save when the power is off
Action when
the
P08.47
frequency
setting is off
1:Clear when the power is off
LED tens:The action selection when MODBUS set
frequency is off
0x000
○
0°
○
0.0°
○
0
●
0:Save when the power is off
1:Clear when the power is off
LED hundreds:The action selection when the other
frequency set frequency is off
0:Save when the power is off
1:Clear when the power is off
High bit of This parameter is used to set the original value of the
P08.48 initial power power comsumotion.
consumption The original value of the power comsumotion
Low bit of =P08.48*1000+ P08.49
P08.49 initial power Setting range of P08.48: 0~59999°(k)
consumption Setting range of P08.49:0.0~999.9°
P08.50
Magnetic flux
braking
This function code is used to enable magnetic flux.
0: Invalid.
1: Valid.
109
Goodrive300 inverters
Functio
Name
n code
Function codes
Detailed instruction of parameters
Default Modif
value
y
0.56
○
0
○
This inverter is used to increase the magnetic flux to
decelerate the motor. The energy generated by the
motor during braking can be converter into heat
energy by increasing the magnetic flux.
The inverter monitors the state of the motor
continuously even during the magnetic flux period.
So the magnetic flux can be used in the motor stop,
as well as to change the rotation speed of the motor.
Its other advantages are:
Brake immediately after the stop command. It does
not need to wait the magnetic flux weaken.
The effect is better for signal cooling. The current of
the stator other than the rotor increases during
magnetic flux braking, while the cooling of the stator
is more effective than the rotor.
Input power This function code is used to adjust the displayed
P08.51 factor of the current of the AC input side.
inverter
P09 Group
Setting range:0.00~1.00
PID control
When the frequency command selection (P00.06,
P00. 07) is 7 or the voltage setting channel selection
(P04.27) is 6, the running mode of the inverter is
procedure PID controlled.
The parameter determines the target given channel
PID
P09.00
during the PID procures.
reference 0:Keypad digital given(P09.01)
source
1:Analog channel AI1 given
2:Analog channel AI2 given
3:Analog channel AI3 set
4:High speed pulse HDI set
5:Multi-stage speed set
6:MODBUS communication set
110
Goodrive300 inverters
Functio
n code
Name
Function codes
Detailed instruction of parameters
Default Modif
value
y
0.0%
○
0
○
0
○
7:PROFIBUS communication set
8:Ethernet communication set
9:CAN communication set
The setting target of procedure PID is a relative one,
100% of the setting equals to 100% of the response
of the controlled system.
The system is calculated according to the relative
value (0~100.0%).
Note:
Multi-stage speed given,it is realized by
setting PA group parameters.
PROFIBUS communication setting,
Ethernet
communication setting and CAN communication
setting need more corresponding extension cards.
P09.01
Keypad PID
preset
When P09.00=0,set the parameter whose basic
value is the response value of the system.
The setting range:-100.0%~100.0%
Select the PID channel by the parameter.
0:Analog channel AI1 feedback
1:Analog channel AI2 feedback
2:Analog channel AI3 feedback
PID
P09.02
feedback
source
3:High speed HDI feedback
4:MODBUS communication feedback
5:PROFIBUS communication feedback
6:Ethernet communication feedback
7:CAN communication feedback
Note:The given channel and the feedback channel
can not coincide, otherwise, PID can not control
effectively.
P09.03
PID output
feature
0:PID output is positive:When the feedback signal
exceeds the PID given value, the output frequency of
the inverter will decrease to balance the PID. For
111
Goodrive300 inverters
Functio
n code
Name
Function codes
Detailed instruction of parameters
Default Modif
value
y
1.00
○
0.10s
○
0.00s
○
example, the strain PID control during wrapup
1:PID output is negative:When the feedback signal is
stronger than the PID given value, the output
frequency of the inverter will increase to balance the
PID. For example, the strain PID control during
wrapdown
The function is applied to the proportional gain P of
PID input.
P determines the strength of the whole PID adjuster.
P09.04
Proportional The parameter of 100 means that when the offset of
gain (Kp)
PID feedback and given value is 100%, the adjusting
range of PID adjustor is the Max. Frequency
(ignoring integral function and differential function).
The setting range:0.00~100.00
This parameter determines the speed of PID
adjustor to carry out integral adjustment on the
deviation of PID feedback and reference.
When the deviation of PID feedback and reference is
P09.05
Intergal
100%, the integral adjustor works continuously after
time(Ti)
the time (ignoring the proportional effect and
differential effect) to achieve the Max. Frequency
(P00.03) or the Max. Voltage (P04.31). Shorter the
integral time, stronger is the adjustment
Setting range: 0.00~10.00s
This parameter determines the strength of th e
change ratio when PID adjustor carries out integral
adjustment on the deviation of PID feedback and
P09.06
Differential reference.
time(Td)
If the PID feedback changes 100% during the time,
the adjustment of integral adjustor (ignoring the
proportional effect and differential effect) is the Max.
Frequency (P00.03) or the Max. Voltage (P04.31).
112
Goodrive300 inverters
Functio
n code
Name
Function codes
Detailed instruction of parameters
Default Modif
value
y
0.10s
○
0.0%
○
100.0%
○
0.0%
○
0.0%
○
Longer the integral time, stronger is the adjusting.
Setting range: 0.01~10.00s
This parameter means the sampling cycle of the
Sampling
P09.07
cycle(T)
feedback. The adjustor operates each sampling
cycle. The longer the sapling cycle is, the slower the
response is.
Setting range: 0.00~100.00s
The output of PID system is the maximum deviation
relative to close loop reference. As shown in the
diagram below, PID adjustor stops to work during the
deviation limit. Set the function properly to adjust the
accuracy and stability of the system.
PID control
P09.08
deviation
limit
Setting range:0.0~100.0%
P09.09
Output upper This parameter is used to set the upper and lower
limit of PID limit of the PID adjustor output.
100.0 % corresponds to Max. Frequency or the Max.
Output lower Voltage of ( P04.31)
P09.10
limit of PID Setting range of P09.09: P09.10~100.0%
Setting range of P09.10: -100.0%~P09.09
Set the PID feedback offline detection value, when
P09.11
Feedback
offline
detection
the detection value is smaller than or equals to the
feedback offline detection value, and the lasting time
113
Goodrive300 inverters
Functio
n code
Name
value
Function codes
Detailed instruction of parameters
Default Modif
value
y
1.0s
○
0x00
○
exceeds the set value in P09.12, the inverter will
report “PID feedback offline fault” and the keypad will
display PIDE.
Feedback
P09.12
offline
detection
time
Setting range of P09.11: 0.0~100.0%
Setting range of P09.12: 0.0~3600.0s
0x00~0x11
LED ones:
0:Keep on integral adjustment when the frequency
achieves the upper and low limit;the integration
shows the change between the reference and the
feedback unless it reaches the internal integral limit.
When the trend between the reference and the
feedback changes, it needs more time to offset the
impact of continuous working and the integration will
P09.13
PID
change with the trend.
adjustment 1:Stop integral adjustment when the frequency
achieves the upper and low limit. If the integration
keeps stable, and the trend between the reference
and the feedback changes, the integration will
change with the trend quickly.
LED tens:
0:The same with the setting direction; if the output of
PID adjustment is different from the current running
direction, the internal will output 0 forcedly.
1:Opposite to the setting direction
114
Goodrive300 inverters
Functio
Name
n code
Function codes
Detailed instruction of parameters
Default Modif
value
y
P09.14
Reserved
●
P09.15
Reserved
●
P09.16
Reserved
●
P10 Group
Simple PLC and multi-stage speed control
0:Stop after running once. The inverter has to be
commanded again after finishing a cycle.
1:Run at the final value after running once. After
P10.00 Simple PLC
finish a signal, the inverter will keep the running
frequency and direction of the last run.
0
○
0
○
0.0%
○
0.0s
○
0.0%
○
0.0s
○
0.0%
○
0.0s
○
0.0%
○
0.0s
○
2:Cycle running. The inverter will keep on running
until receiving a stop command d. And then, the
system will stop.
P10.01
P10.02
Simple PLC
memory
0: Power loss without memory
1:Power loss memory;PLC record the running stage
and frequency when power loss.
Multi-step The frequency setting range of stage 0~15:
speed 0
-100.0~100.0%,100.0% of the frequency setting
The running corresponds to the Max. Frequency P00.03.
P10.03 time of step The operation time setting of stage 0~15: the time
0
P10.04
P10.05
P10.06
unit is determined by P10.37. When selecting simple
Multi-step PLC running, set P10.02~P10.33 to define the
speed 1
running frequency and time of all stages.
The running Note:The symbol of multi-stage determines the
time of step 1 running direction of simple PLC. The negative value
Multi-step means reverse rotation.
speed 2
P10.07
The running
time of step 2
P10.08
P10.09
Multi-step
speed 3
The running
time of step 3
115
Goodrive300 inverters
Functio
n code
P10.10
P10.11
Name
Function codes
Detailed instruction of parameters
Multi-step
speed 4
The running
Default Modif
value
y
0.0%
○
0.0s
○
0.0%
○
0.0s
○
0.0%
○
0.0s
○
0.0%
○
0.0s
○
0.0%
○
0.0s
○
0.0%
○
0.0s
○
0.0%
○
0.0s
○
0.0%
○
time of step 4
P10.12
Multi-step
speed 5
P10.13
P10.14
P10.15
P10.16
The running
time of step 5
Multi-step
speed 6
The running
time of step 6
Multi-step
speed 7
P10.17
The running
time of step 7
P10.18
P10.19
Multi-step
speed 8
The running
time of step 8
If multi-stage speed operation is selected,
multi-stage speeds are in the range of --fmax~fmax and
it can be set continuously.
Goodrive300 series inverters can set 16 stages
speed, selected by the combination of multi-stage
terminals 1~4(select the setting by S terminals, the
corresponding function codes are P05.01~P05.09),
P10.20
P10.21
Multi-step
corresponding to the speed 1 to speed 15.
speed 9
The running
time of step 9
P10.22
Multi-step
speed 10
The running
P10.23 time of step
10
P10.24
Multi-step
speed 11
116
Goodrive300 inverters
Functio
n code
Name
Function codes
Default Modif
Detailed instruction of parameters
value
y
0.0s
○
0.0%
○
0.0s
○
0.0%
○
0.0s
○
0.0%
○
0.0s
○
0.0%
○
0.0s
○
0x0000
○
The running
P10.25 time of step
11
P10.26
Multi-step
speed 12
The running
P10.27 time of step
12
P10.28
Multi-step
speed 13
The running When terminal 1, terminal 2, terminal 3, terminal
P10.29 time of step 4=OFF, the frequency input manner is selected via
13
P10.30
Multi-step terminal 3, terminal 4 aren’t off, it runs at multi-stage
speed 14 which takes precedence of keypad, analog value,
The running
P10.31 time of step
14
P10.32
code P00.06 or P00.07. When terminal 1, terminal 2,
Multi-step
speed 15
high-speed pulse, PLC, communication frequency
input.
The relationship between terminal 1, terminal 2,
terminal 3, terminal 4 and multi-stage speed is as
following:
Terminal 1 OFF ON OFF ON OFF ON OFF ON
Terminal 2 OFF OFF ON ON OFF OFF ON ON
Terminal 3 OFF OFF OFF OFF ON ON ON ON
Terminal 4 OFF OFF OFF OFF OFF OFF OFF OFF
The running
P10.33 time of step
15
stage
0
1
2
3
4
5
6
7
Terminal 1 OFF ON OFF ON OFF ON OFF ON
Terminal 2 OFF OFF ON ON OFF OFF ON ON
Terminal 3 OFF OFF OFF OFF ON ON ON ON
Terminal 4 ON ON ON ON ON ON ON ON
Stage
P10.34 Simple PLC
8
9
10
11
12
Below is the detailed instruction:
117
13
14
15
Goodrive300 inverters
Functio
n code
Function codes
Name
Default Modif
Detailed instruction of parameters
0~7 step
Function
ACC/DEC
code
value
y
0x0000
○
0
◎
Stag ACC/DE ACC/DE ACC/DE ACC/DE
Binary bit
time
e
C0
C1
C2
C3
BIT1
BIT0 0
00
01
10
11
BIT3
BIT2 1
00
01
10
11
BIT5
BIT4 2
00
01
10
11
BIT7
BIT6 3
00
01
10
11
BIT9
P10.34
Simple PLC
P10.35
8~15 step
ACC/DEC
time
BIT8 4
00
01
10
11
BIT11 BIT10 5
00
01
10
11
BIT13 BIT12 6
00
01
10
11
BIT15 BIT14 7
00
01
10
11
BIT1
BIT0 8
00
01
10
11
BIT3
BIT2 9
00
01
10
11
BIT5
BIT4 10 00
01
10
11
BIT7
BIT6 11 00
01
10
11
BIT9
BIT8 12 00
01
10
11
BIT11 BIT10 13 00
01
10
11
BIT13 BIT12 14 00
01
10
11
BIT15 BIT14 15 00
01
10
11
P10.35
After the users select the corresponding ACC/DEC
time, the combining 16 binary bit will change into
Hexadecimal bit, and then set the corresponding
function codes.
ACC/DEC time 1 is aet by P00.11 and P00.12;
ACC/DEC time 2 is aet by P08.00 and P08.01;
ACC/DEC time 3 is aet by P08.02 and P08.03;
ACC/DEC time 4 is aet by P08.04 and P08.05.
Setting range: -0x0000~0xFFFF
0:Restart from the first stage; stop during running
(cause by the stop command, fault or power loss),
P10.36
PLC restart run from the first stage after restart.
1: Continue to run from the stop frequency; stop
during running(cause by stop command and fault),
118
Goodrive300 inverters
Functio
Function codes
Name
n code
Detailed instruction of parameters
Default Modif
value
y
0
◎
11
○
0
○
the inverter will record the running time
automatically, enter into the stage after restart and
keep the remaining running at the setting frequency.
0: Seconds;the running time of all stages is counted
P10.37
Multi-step by second
time unit
1: Minutes;the running time of all stages is counted
by minute
P11 Group
Protective parameters
0x00~0x11
LED ones:
P11.00
Phase loss
protection
0: Input phase loss protection disable
1: Input phase loss protection enable
LED tens:
0: Input phase loss protection disable
1: Input phase loss protection enable
Sudden
P11.01
power loss 0: Enable
frequency-de 1: Disable
creasing
Setting range: 0.00Hz/s~P00.03 (the Max.
frequency)
After the power loss of the grid, the bus voltage
drops to the sudden frequency-decreasing point, the
inverter begin to decrease the running frequency at
Frequency P11.02, to make the inverter generate power again.
decreasing The returning power can maintain the bus voltage to
P11.02
ratio of
ensure a rated running of the inverter until the
sudden
recovery of power.
Voltage degree
power loss
z/s
220V
380V
660V
260V
460V
800V
frequency-decre
asing point of
sudden power
10.00H
loss
Note:
119
○
Goodrive300 inverters
Functio
n code
Name
Function codes
Detailed instruction of parameters
Default Modif
value
y
1
○
1. Adjust the parameter properly to avoid the
stopping caused by inverter protection during the
switching of the grid.
2. Prohibition of input phase protection can enable
this function.
0:Disable
1:Enable
Overvoltage
P11.03
speed loss
protection
Overvoltage 120~150%(standard bus voltage)( 230V)
P11.04
120%
speed loss
120~150%(standard bus voltage)(400V)
140%
protection 120~150%(standard bus voltage)( 690V)
120%
voltage
○
Current limit The actual increasing ratio is higher than the ratio of
P11.05
action
selection
output frequency because of the big load during
1
◎
160.0%
◎
ACC running. It is necessary to take measures to
avoid overcurrent fault and the inverter trips.
P11.06
Automatic During the running of the inverter, this function will
current limit detect the output current and compare it with the limit
level defined in P11.06. If it exceeds the level, the
inverter will run at stable frequency in ACC running,
The
P11.07
or the inverter will derate to run during the constant
decreasing running. If it exceeds the level continuously, the
10.00H
ratio during output frequency will keep on decreasing to the
z/s
current limit lower limit. If the output current is detected to be
lower than the limit level, the inverter will accelerate
120
◎
Goodrive300 inverters
Functio
n code
Name
Function codes
Detailed instruction of parameters
Default Modif
value
y
0x000
○
150%
○
1.0s
○
to run.
Setting range of P11.05:
0:current limit invalid
1:current limit valid
2:current limit is invalid during constant speed
Setting range of P11.06:50.0~200.0%
Setting range of P11.07:0.00~50.00Hz/s
Overload
The output current of the inverter or the motor is
pre-alarm of above P11.09 and the lasting time is beyond P11.10,
P11.08
the
overload pre-alarm will be output.
motor/inverte
r
Overload
P11.09
pre-alarm
test level
Overload
P11.10
Setting range of P11.08:
pre-alarm Enable and define the overload pre-alarm of the
detection inverter or the motor.
time
Setting range: 0x000~0x131
LED ones:
0:Overload pre-alarm of the motor, comply with the
121
Goodrive300 inverters
Functio
n code
Name
Function codes
Detailed instruction of parameters
Default Modif
value
y
50%
○
1.0s
○
0x00
○
rated current of the motor
1:Overload pre-alarm of the inverter, comply with the
rated current of the inverter
LED tens:
0:The inverter continues to work after underload
pre-alarm
1:The inverter continues to work after underload
pre-alarm and the inverter stops to run after overload
fault
2: The inverter continues to work after overload
pre-alarm and the inverter stops to run after
underload fault
LED hundreds :
0:Detection all the time
1:Detection in constant running
Setting range of P11.09: P11.11~200%
Setting range of P11.10: 0.1~3600.0s
Detection
P11.11
level of the
underload
pre-alarm
Detection
P11.12
time of the
If the inverter current or the output current is lower
than P11.11, and its lasting time is beyond P11.12,
the inverter will output underload pre-alarm.
Setting range of P11.11: 0~P11.09
Setting range of P11.12: 0.1~3600.0s
underload
pre-alarm
Select the action of fault output terminals on
undervoltage and fault reset.
P11.13
Output
0x00~0x11
terminal
LED ones:
action during 0:Action under fault undervoltage
fault
1:No action under fault undervoltage
LED tens:
0:Action during the automatic reset
122
Goodrive300 inverters
Functio
Name
n code
Function codes
Detailed instruction of parameters
Default Modif
value
y
10.0%
●
0.5s
○
0
◎
1:No action during the automatic reset
Speed
P11.14
deviation
detection
0.0~50.0%
Set the speed deviation detection time.
This parameter is used to see the speed deviation
detection time.
Speed
P11.15
deviation
detection
time
Setting range of P11.08: 0.0~10.0s
P11.16
Reserved
P12 Group
Motor 2
0:Asynchronous motor
P12.00 Motor type 2
1:Synchronous motor
Note: switch the current motor by the switching
channel of P08.31.
Asynchronou
P12.01
P12.02
Set the parameter of
s motor 2 0.1~3000.0kW
the controlled
rated power
asynchronous motor.
Asynchronou
In order to ensure the
s motor 2 0.01Hz~P00.03(the Max.
rated
controlling
performance, set the
frequency)
Depend
on
◎
model
50.00H
◎
z
P12.01~P12.05
frequency
according to the name
plate of the
P12.03 Asynchronou 1~36000rpm
s motor 2
rated rotation
asynchronous motor.
123
Depend
on
model
◎
Goodrive300 inverters
Functio
n code
Name
Function codes
Detailed instruction of parameters
speed
s motor 2
value
y
CHE series inverters
provide the function of
Asynchronou
P12.04
Default Modif
parameter autotuning.
0~1200V
rated
Correct parameter
voltage
autotuning comes
Depend
on
◎
model
from the correct
setting of the motor
name plate.
In order to ensure the
controlling
performance, please
configure the motor
according to the
Asynchronou
P12.05
s motor 2
0.8~6000.0A
rated
standard principles, if
Depend
the gap between the
on
motor and the
current
◎
model
standard one is huge,
the features of the
inverter will decrease.
Note:reset the rated
power of the
motor(P12.01),initializ
e the motor parameter
of P12.02~P12.05
P12.06
P12.07
Asynchronou
After finish the motor
s motor 2
parameter autotuning,
rotor
0.001~65.535Ω
the set value of
resistance
P12.06~P12.10 will
Asynchronou
renew automatically.
s motor 2
These parameters are
0.001~65.535Ω
basic parameters
stator
controlled by vectors
resistance
124
Depend
on
○
model
Depend
on
model
○
Goodrive300 inverters
Functio
n code
Name
Function codes
Detailed instruction of parameters
Asynchronou
P12.08
which directly impact
s motor 2 0.1~655.35mH
the features.
leakage
Note: Users cannot
P12.09
mutual
value
y
Depend
on
○
model
modify the parameters
Asynchronou
s motor 2
Default Modif
freely.
0.1~655.35mH
Depend
on
○
model
induction
Asynchronou
P12.10
s motor 2
Depend
0.1~6553.5A
on
noload
○
model
current
Magnetic
saturation
P12.11 coefficient 1 0.0~100.0%
80.0%
◎
68.0%
◎
57.0%
◎
40.0%
◎
for the iron
core of AM2
Magnetic
saturation
P12.12 coefficient 2 0.0~100.0%
for the iron
core of AM2
Magnetic
saturation
P12.13 coefficient 3 0.0~100.0%
for the iron
core of AM2
Magnetic
saturation
P12.14 coefficient 4 0.0~100.0%
for the iron
core of AM2
125
Goodrive300 inverters
Functio
n code
Name
Function codes
Detailed instruction of parameters
Synchronous
Set the parameter of
P12.15 motor 2 rated 0.1~3000.0kW
the controlled
power
Synchronous
P12.16 motor 2 rated
frequency
asynchronous motor.
motor 2
value
y
Depend
on
◎
model
In order to ensure the
0.01Hz~P00.03(the Max.
frequency)
controlling
performance, set the
50.00H
◎
z
P12.151~P12.19
Synchronous
P12.17
Default Modif
according to the name
1~50
2
◎
plate of the
pority pairs
Synchronous
asynchronous motor.
P12.18 motor 2 rated 0~1200V
CHE series inverters
Depend
on
voltage
provide the function of
model
Synchronous
parameter autotuning.
Depend
P12.19 motor 2 rated 0.8~6000.0A
current
Correct parameter
on
autotuning comes
model
◎
◎
from the correct
setting of the motor
name plate.
In order to ensure the
controlling
performance, please
configure the motor
according to the
Synchronous
P12.20 motor 2 rotor 0.001~65.535Ω
resistance
on
the gap between the
model
motor and the
standard one is huge,
the features of the
inverter will decrease.
Note:reset the rated
power of the
motor(P12.15),initializ
126
Depend
standard principles, if
○
Goodrive300 inverters
Functio
n code
Function codes
Name
Detailed instruction of parameters
Default Modif
value
y
e the motor parameter
of P12.16~ P12.19.
Synchronous
P12.21
motor 2
d-axis
Depend
0.1~6553.5mH
inductor
motor 2
quadrature
0.1~6553.5mH
value of P12.23 cannot be
updated by autotuning,
please count according to
the following method.
force constant can be
parameters on the name
Synchronous plate of the motor. There are
three ways to count:
on
○
model
controlled by vectors
which directly impact
the features.
When P00.15=1, the
can be updated
automatically, and
there is no need to
change the value of
P12.23; when
counter-elect 1. If the name plate
force
Depend
renew automatically.
through autotuning
counted according to the
constant
P12.20~P12.22 will
set value of P12.23
The counter-electromotive
romotive
○
basic parameters
When P00.15=2, the set
P12.23
parameter autotuning,
These parameters are
axis inductor
motor 2
on
model
the set value of
Synchronous
P12.22
After finish the motor
P00.15=2, the set
designate the
value of P12.23 can
counter-electromotive force
constant Ke, then:
not be updated
through autotuning,
E=(Ke*nN*2π)/ 60
2. If the name plate
please account and
update the value of
designate the
P12.23.
counter-electromotive force
constant E’(V/1000r/min),
then:
Note:Users cannot
modify the parameters
freely.
E=E’*nN/1000
3. Iif the name plate does
not designate the above
127
300
○
Goodrive300 inverters
Functio
n code
Name
Function codes
Detailed instruction of parameters
Default Modif
value
y
0x0000
●
10%
●
2
◎
100.0%
○
parameters, then:
E=P/√3*I
In the above formulas: nN is
the rated rotation speed, P
is the rated power and I is
the rated current.
Setting range: 0~10000
Synchronous
motor 2
P12.24
original
magnetic
0~FFFFH (reserved)
pority
position
Synchronous
P12.25
motor 2
identification
0%~50%(the rated current of the motor)(reserved)
current
P12.26
Motor 2
0:No protection
overload
1:Common motor(with low speed compensation)
protection 2:Invertering motor(without low speed
selection
compensation)
When P12.27=overload protection current of the
motor/rated current of the motor
So, the bigger the overload coefficient is, the shorter
P12.27
Motor 2
the reporting time of the overload fault is. When the
overload
overload coefficient <110%, there is no overload
protection
coefficient
protection. When the overload coefficient =116%,
the fault will be reported after 1 hour, when the
overload coefficient =200%, the fault will be reported
after 1 minute.
128
Goodrive300 inverters
Functio
Name
n code
Function codes
Detailed instruction of parameters
Default Modif
value
y
Setting range: 20.0%~120.0%
P12.28
●
Reserved
0: Display according to the motor type: only the
Motor 2
P12.29
parameters relative to the current motor type are
parameters displayed for the convenient for the customers in this
display
selection
mode.
0
●
80.0%
◎
0
◎
20.0%
○
10.0%
○
1: All parameters are displayed: all parameters are
displayed in this mode.
P13 Group
Synchronous motor control
Reduction
P13.00
factor of
source
0.0~100.0%
current
Original
P13.01
0: No test
pority test 1: High-frequency superposition (reserved)
means
2: Pulse superposition
Source current is directional current of the magnetic
pole position. Source current 1 is effective under the
P13.02
Source
frequency point of current shifting. Please increase
current 1
the value is the starting torque should be modified.
Setting range;0.0%~100.0% (rated current of the
motor)
P13.03
Source
Source current is directional current of the magnetic
current 2
pole position. Source current 2 is effective under the
129
Goodrive300 inverters
Functio
n code
Name
Function codes
Detailed instruction of parameters
Default Modif
value
y
frequency point of current shifting. There is no need
to modify the value generally.
Setting range: 0.0%~100.0%(rated current of the
motor)
Shift
P13.04
frequency of
source
current
Valid frequency shifting point between source
current 1 and current 2.
Setting range: 0.00Hz~P00.03(the Max. frequency)
10.00
○
Hz
Superposing
P13.05
frequency 200~1000Hz
500Hz
◎
40.0%
◎
(reserved)
P13.06
Pulse
superpositio 0.0~300.0%(rated voltage of the motor)
n voltage
P13.07 Reserved
0~65535
0
○
P13.08 Reserved
0~65535
0
○
P13.09 Reserved
0~655.35
2.00
○
P13.10 Reserved
0~65535
0
○
0.5s
○
0.0%
○
0.0%
○
0.0s
○
Maladjustme
P13.11
nt detection
time
High
P13.12
Adjust the response of anti-maladjustment. If the
inertia of the load is bigger, this value may be bigger
too, but the response will be slow.
Setting range: 0.0~10.0s
When the motor runs above the rated rotation speed,
frequency the parameter is valid, if vibration occurs to the
compensatio motor, please adjust the parameter.
n coefficient Setting range: 0~100.0%
Braking
P13.13
When P01.00=0 during the starting of the inverter,
current of set P13.14 to a non-zero value to enter the short
short-circuit circuit braking.
The braking When the running frequency is lower than P01.09
P13.14
retention
during the stopping of the inverter, set 13.15 to a
time before non-zero value to enter into stopping short circuited
starting
braking and then carry out the DC braking at the time
130
Goodrive300 inverters
Functio
Name
n code
The braking
P13.15
retention
time when
stopping
P14 Group
Function codes
Detailed instruction of parameters
Default Modif
value
y
0.0s
○
1
○
4
○
1
○
set by P01.12 (refer to the instruction of
P01.09~P01.12) .
Setting range of P13.13: 0.0~150.0%(the inverter)
Setting range of P13.14: 0.0~50.0s
Setting range of P13.15: 0.0~50.0s
Serial communication
The setting range:1~247
When the master is writing the frame, the
communication address of the slave is set to 0; the
address is the communication address. All slaves on
Local
the MODBUS fieldbus can receive the frame, but the
P14.00 communicati salve doesn’t answer.
address
The communication of the drive is unique in the
communication net. This is the fundamental for the
point to point communication between the upper
monitor and the drive.
Note:The address of the slave cannot set to 0.
Set the digital transmission speed between the
upper monitor and the inverter.
0:1200BPS
1:2400BPS
2:4800BPS
3:9600BPS
P14.01
Communicati 4:19200BPS
baud ratio 5:38400BPS
6:57600BPS
7:115200BPS
Note:The baud rate between the upper monitor and
the inverter must be the same. Otherwise, the
communication is not applied. The bigger the baud
rate, the quicker the communication speed.
P14.02
Digital bit
checkout
The data format between the upper monitor and the
inverter must be the same. Otherwise, the
communication is not applied.
131
Goodrive300 inverters
Functio
n code
Name
Function codes
Detailed instruction of parameters
Default Modif
value
y
5
○
0.0s
○
0
○
0x00
○
0: No check (N,8,1)for RTU
1:Odd check (E,8,1)for RTU
2:Even check (O,8,1)for RTU
3:No check (N,8,2)for RTU
4: Odd check (E,8,2)for RTU
5:Even check(O,8,2)for RTU
0~200ms
Mean the interval time when the drive receive the
data and sent it to the upper monitor. If the answer
P14.03
Answer
delay
delay is shorter than the system processing time,
then the answer delay time is the system processing
time, if the answer delay is longer than the system
processing time, then after the system deal with the
data, waits until achieving the answer delay time to
send the data to the upper monitor.
0.0(invalid),0.1~60.0s
When the function code is set as 0.0, the
communication overtime parameter is invalid.
Fault time of
P14.04 communicati
on overtime
When the function code is set as non-zero, if the
interval time between two communications exceeds
the communication overtime, the system will report
“485 communication faults” (CE).
Generally, set it as invalid; set the parameter in the
continuous communication to monitor the
communication state.
0:Alarm and stop freely
Transmissio
P14.05
n fault
processing
1:No alarm and continue to run
2:No alarm and stop according to the stop
means(only under the communication control)
3:No alarm and stop according to the stop
means(under all control modes)
Communicati 0x00~0x11
P14.06
on
LED ones:
processing 0:Operation with response: the drive will respond to
132
Goodrive300 inverters
Functio
Name
n code
Function codes
Detailed instruction of parameters
Default Modif
value
y
all reading and writing commands of the upper
monitor.
1:Operation without response;The drive only
responds to the reading command other than the
writing command of the drive. The communication
efficiency can be increased by this method.
LED tens:(reserved)
P14.07
Reserved
●
P14.08
Reserved
●
P15 Group
Profibus function
P15.00 Module type
0:Profibus
Select communication protocol
0
◎
2
◎
0
○
0
○
0
○
0
○
0
○
0
○
0
○
0~127
This function code is used to designate the address
P15.01
Module
address
of the inverter.
Note:0 is the broadcast address,when set it as
broadcast address, only receive the radio command
of the upper monitor other than answering the upper
monitor.
P15.02
P15.03
P15.04
P15.05
P15.06
P15.07
P15.08
PZD2
0:Invalid
Receiving 1:Set frequency(0~Fmax(unit:0.01Hz))
PZD3
2:Given PID, range(0~1000,1000 corresponds to
Receiving 100.0%)
PZD4
3:PID feedback, range(0~1000,1000 corresponds
Receiving to 100.0%)
PZD5
4:Torque set value(-3000~3000,1000 corresponds to
Receiving 100.0% the rated current of the motor)
5:Set value of the forward rotation upper-limit
PZD6
Receiving frequency(0~Fmax unit:0.01Hz))
6:Set value of the reversed rotation upper-limit
PZD7
frequency(0~Fmax(unit:0.01Hz))
Receiving
7:Electromotion torque upper limit (0~3000,1000
PZD8
corresponds to 100.0%of the rated current of the
Receiving
133
Goodrive300 inverters
Functio
n code
P15.09
P15.10
P15.11
Name
PZD9
Function codes
Detailed instruction of parameters
motor)
Receiving 8:Braking torque upper limit (0~2000,1000
PZD10
value
y
0
○
0
○
0
○
0
○
0
○
0
○
0
○
0
○
0
○
0
○
0
○
0
○
0
○
0
○
corresponds to 100.0% of the rated current of the
Receiving motor)
PZD11
Default Modif
9:Virtual input terminals command
Receiving Range:0x000~0x1FF
10:Virtual output terminals command
Range:0x00~0x0F
11:Voltage setting
value(specialized for V/F
separation )(0~1000,1000 corresponds to 100.0%
P15.12
PZD12
Receiving
the rated voltage of the motor)
12:AO output set value 1(-1000~1000,1000
corresponds to 100.0%)
13:AO output set value 2(-1000~1000,1000
corresponds to 100.0%)
P15.13
P15.14
P15.15
P15.16
P15.17
P15.18
P15.19
P15.20
P15.21
P15.22
PZD2
sending
PZD3
sending
0: Invalid
1: Running frequency(*100,Hz)
2: Set frequency(*100,Hz)
3: Bus voltage(*10,V)
PZD4
4: Output voltage(*1,V)
sending
5:Output current (*10,A)
PZD5
6:Output torque actual value(*10,%)
sending
7:Output power actual value(*10,%)
PZD6
8:Running rotating speed(*1,RPM)
sending
PZD7
sending
PZD8
sending
PZD9
sending
PZD10
sending
PZD11
9:Running linear speed (*1,m/s)
10:Ramp given frequency
11:Fault code
12:AI1 value (*100,V)
13:AI2 value (*100,V)
14:AI3 value (*100,V)
15:PULSE frequency value (*100,kHz)
16:Terminals input state
17:Terminals output state
18:PID given(*100,%)
134
Goodrive300 inverters
Functio
Name
n code
P15.23
Function codes
Detailed instruction of parameters
sending
19:PID feedback(*100,%)
PZD12
20:Motor rated torque
sending
Default Modif
value
y
0
○
0
○
0.0s
○
0
●
Temporarily
P15.24 variable 1 for 0~65535
PZD sending
0.0(ineffective),0.1~60.0s
DP
P15.25
communicati
on overtime
downtime
When this function code is set as 0.0, this function is
ineffective.
When the function code is set as nonzero value, if
the internal time between two adjent communication
exceeds the communication overtime, the system
will report “PROFIBUS communication fault”(P-DP) .
0: 50k
CAN
1: 125 k
P15.26 communicati 2: 250 k
on baud rate 3: 500 k
4: 1M
P15.27
Reserved
●
P15.28
Reserved
●
P15.29
Reserved
●
P16 Group
Ethernet function
0:Self-adapting
Speed
1:100M full duplex
setting of the 2:100M semiduplex
3
◎
P16.01 IP address 1 0~255
192
◎
P16.02 IP address 2 Set the IP address of Ethernet communication
The format of IP address:PA.09.PA.10.PA.11.PA.12.
P16.03 IP address 3
168
◎
0
◎
P16.00
Ethernet
3:10M full duplex
communicati 4:10M semiduplex
on
The function code is used to set the Ethernet
communication speed.
135
Goodrive300 inverters
Functio
Name
n code
Function codes
Detailed instruction of parameters
P16.04 IP address 4 For example:IP address is 192.168.0.1.
Default Modif
value
y
1
◎
◎
P16.05 Subnet mask
255
1
0~255
P16.06 Subnet mask
2
P16.07 Subnet mask
3
◎
Set the subnet mask of Ethernet communication.
The format of
255
IP subnet
mask:PA.13.PA.14.PA.15.PA.16.
◎
255
For example:The mask is 255.255.255.0.
◎
P16.08 Subnet mask
0
4
P16.09
Gateway 1
192
◎
P16.10
Gateway 2 0~255
168
◎
P16.11
Gateway 3 Set the gateway of Ethernet communication
1
◎
P16.12
Gateway 4
1
◎
P16.13
Reserved
●
P16.14
Reserved
●
P17 Group
P17.00
Monitoring function
Set
Display current set frequency of the inverter
0.00Hz
●
0.00Hz
●
0.00Hz
●
0V
●
0.0A
●
0 RPM
●
0.0A
●
frequency Range: 0.00Hz~P00.03
P17.01
Output
frequency Range: 0.00Hz~P00.03
Ramp
P17.02
reference
frequency
P17.03
P17.04
Display current output frequency of the inverter
Display current ramp given frequency of the inverter
Range: 0.00Hz~P00.03
Output
Display current output voltage of the inverter
voltage
Range: 0~1200V
Output
Display current output current of the inverter
current
Range: 0.0~5000.0A
P17.05 Motor speed
Display the rotation speed of the motor.
Range: 0~65535RPM
P17.06
Torque
Display current torque current of the inverter
current
Range: 0~65535RPM
136
Goodrive300 inverters
Functio
n code
P17.07
Name
Reserved
Function codes
Detailed instruction of parameters
Display current magnetized current of the inverter
Range: 0.0~5000.0A
Default Modif
value
y
0.0A
●
0.0%
●
0.0%
●
0.00Hz
●
0V
●
0
●
0
●
0.00V
●
0.0%
●
0
●
0
●
Display current power of the motor.
P17.08 Motor power Setting range: -300.0%~300.0%(the rated current of
the motor)
P17.09
Output
Display the current output torque of the inverter.
torque
Range: -250.0~250.0%
Evaluated Evaluate the motor rotor frequency on close loop
P17.10
motor
vector
frequency Range: 0.00~ P00.03
P17.11
DC bus
Display current DC bus voltage of the inverter
voltage
Range: 0.0~2000.0V
ON-OFF
P17.12
input
terminals
state
ON-OFF
P17.13
output
terminals
Display current Switch input terminals state of the
inverter
Range: 0000~00FF
Display current Switch output terminals state of the
inverter
Range: 0000~000F
state
P17.14
Digital
adjustment
Display the adjustment through the keypad of the
inverter.
Range : 0.00Hz~P00.03
Display the torque given, the percentage to the
P17.15
Torque
current rated torque of the motor.
reference Setting range: -300.0%~300.0%(the rated current of
the motor)
P17.16 Linear speed
P17.17
Length
Display the current linear speed of the inverter.
Range: 0~65535
Display the current length of the inverter.
Range: 0~65535
137
Goodrive300 inverters
Functio
n code
P17.18
P17.19
Name
Detailed instruction of parameters
Counting
Display the current counting number of the inverter.
value
AI1 input
voltage
P17.20
AI2 input
voltage
P17.21
P17.22
AI3 input
voltage
HDI input
reference
value
PID
P17.24
feedback
value
P17.25
P17.26
Range: 0~65535
Display analog AI1 input signal
Display analog AI2 input signal
value
y
0
●
0.00V
●
0.00V
●
0.00V
●
Range: 0.00~10.00V
Display analog AI2 input signal
Range: -10.00~10.00V
Display HDI input frequency
Display PID given value
Range: -100.0~100.0%
Display PID response value
Range: -100.0~100.0%
Power factor Display the current power factor of the motor.
of the motor Range: -1.00~1.00
Current
Default Modif
Range: 0.00~10.00V
frequency Range: 0.00~50.00kHz
PID
P17.23
Function codes
Display the current running time of the inverter.
running time Range:0~65535min
0.00
●
kHz
0.0%
●
0.0%
●
0.0
●
0m
●
0
●
0.0%
●
0.0
●
Simple PLC
and the
P17.27
current step
of the
Display simple PLC and the current stage of the
multi-stage speed
Range: 0~15
multi-step
speed
ASR
P17.28
controller
output
The percentage of the rated torque of the relative
motor, display ASR controller output
Range: -300.0%~300.0% (the rated current of the
motor)
P17.29 Synchronous Display synchronous motor Magnetic pole angle
138
Goodrive300 inverters
Functio
n code
Name
motor
Function codes
Detailed instruction of parameters
Default Modif
value
y
0.0
●
0.0
●
0
●
0
●
0
●
0
●
0
●
0
●
0
●
Range: 0.0~360.0
Magnetic
pole angle
synchronous
P17.30
motor phase Display synchronous motor phase compensation
compensatio Range: -180.0~180.0
n
synchronous
motor
P17.31
high-frequen
cy
Display synchronous motor high-frequency
Superimposed current
Range: 0.0%~200.0%(the rated current of the motor)
Superimpose
d current
P17.32
Magnetic flux Display the magnetic flux linkage of the motor.
linkage
P17.33
Exciting
current given
P17.34
Torque
current given
P17.35
Range: 0.0%~200.0%
Display the exciting current given in the vector
control mode.
Range: -3000.0~3000.0A
Display the torque current given in the vector control
mode.
Range: -3000.0~3000.0A
AC advance Display the value of advance wire current in AC side.
wire current Range: 0.0~5000.0A
Display the output torque. Positive value is in the
P17.36
Output
electromotion state, and negative is in the power
torque
generating state.
Range : -3000.0Nm~3000.0Nm
Count value
P17.37
of motor
0~100(100 reports OL1 fault)
overload
P17.38
Reserved
139
Goodrive300 inverters
Functio
n code
P17.39
Name
Function codes
Detailed instruction of parameters
Reserved
140
Default Modif
value
y
0
●
Goodrive300 inverters
Basic operation instruction
Basic Operation Instruction
7
7.1 What this chapter contains
This chapter describes the internal function mode of the inverter in details.
Check all terminals are connected properly and tightly.
Check that the power of the motor corresponds to that of the inverter.
7.2 First powering on
Check before powering on
Please check according to the installation list in chapter two.
Original powering operation
Check to ensure there is no mistake in wiring and power supply, switch on the air switch of the AC
power supply on the input side of the inverter to power on the inverter. 8.8.8.8.8. will be displayed
on the keypad, and the contactor closes normally. When the character on the nixie tubs changes to
the set frequency, the inverter has finished the initialization and it is in the stand-by state.
Below diagram shows the first operation: (take motor 1 as the example)
141
Goodrive300 inverters
Basic operation instruction
142
Goodrive300 inverters
Basic operation instruction
Note: If fault occurs, please do as the “Fault Tracking”. Esitimate the fault reason and settle the
issue.
Besides P00.01 and P00.02, terminal command setting can also used to set the running command
channel.
Current runnig
Multi-function
command
terminal 36
channel
Shifting the
P00.01
command to keypad
Multi-function
Multi-function
terminal 37
terminal 38
Shifting the
Shifting the
command to
command to
communication
Keypad runnig
command
Terminal
/
runnig
command channel
channel
communication
Communication
runnig
command
channel
Terminal runnig
command
Keypad
runnig
command channel
Communication
/
runnig
channel
command
channel
Communication
runnig command
Keypad
runnig
command channel
Terminal
runnig
command channel
/
channel
Note: “/” means the multi-function terminal is invalid on the current given channel.
Relative parameters table:
Function
code
Name
Detailed instruction of parameters
Default
value
0: Sensorless vector control mode 0
(applying to AM,SM)
P00.00
Speed control mode
1: Sensorless vector control mode 1
1
(applying to AM)
2:V/F control (applying to AM and SM)
0:Keypad running command
channel(LED off)
P00.01
Run command channel
1:Terminal running command channel
(LED flickering)
2:Communication running command
channel (LED on);
143
0
Goodrive300 inverters
Function
code
Basic operation instruction
Name
Detailed instruction of parameters
Default
value
0:MODBUS communication channel
Communication running
1:PROFIBUScommunication channel
P00.02
commands channel
0
2:Ethernet communication channel
selection
3:CAN communication channel
0:No operation
Function parameter
P00.18
1:Restore the default value
0
restore
2:Cancel the fault record
0:No operation
Motor parameter
1:Rotation autotuning
autotuning
2:Static autotuning 1
P00.15
0
3: Static autotuning 2
0:Asynchronous motor
P02.00
Motor type 1
0
1:Synchronous motor
Asynchronous motor 1
P02.01
Depend
0.1~3000.0kW
rated power
on model
Asynchronous motor 1
P02.02
0.01Hz~P00.03(the Max. frequency)
50.00Hz
rated power
Asynchronous motor 1
P02.03
Depend
1~36000rpm
rated rotating speed
on model
Asynchronous motor 1
P02.04
Depend
0~1200V
rated voltage
on model
Asynchronous motor 1
P02.05
Depend
0.8~6000.0A
rated current
on model
Synchronous motor 1
P02.15
Depend
0.1~3000.0kW
rated power
on model
Synchronous motor 1
P02.16
0.01Hz~P00.03(the Max. frequency)
50.00Hz
rated frequency
Synchronous motor 1
P02.17
1~50
number of poles pairs
144
2
Goodrive300 inverters
Function
code
Basic operation instruction
Name
Synchronous motor 1
Detailed instruction of parameters
Default
value
0~1200V
Depend
P02.18
rated voltage
P02.19
Synchronous motor 1
on model
0.8~6000.0A
Depend
rated current
Multi-function digital input
P05.01~P0
terminals
5.09
(S1~S8,HDI) function
selection
on model
36:Shift the command to the keypad
37:Shift the command to the terminals
38:Shift
the
command
to
the
communication
The
function
code
determines
the
manner of parameters copy.
0:No operation
1:Upload the local function parameter to
the keypad
2:Download
P07.01
Function parameter copy
the
keypad
function
parameter to local address(including the
motor parameters)
3:Download
the
keypad
0
function
parameter to local address (excluding the
motor parameter of P02, P12 group)
4:Download
the
keypad
function
parameters to local address (only for the
motor parameter of P02,P12 group)
0:No function
1:Jogging running. Press QUICK/JOGto
realizes the jogging running.
2:Shift the display state by the shifting
P07.02
QUICK/JOG function
selection
key.
Press
QUICK/JOGto
shift
the
displayed function code from right to left.
3:Shift between forwad rotations and
reverse rotations. Press QUICK/JOG to
shift the direction of the frequency
commands. This function is only valid in
145
1
Goodrive300 inverters
Function
code
Basic operation instruction
Name
Detailed instruction of parameters
Default
value
the keypad commands channels.
4:Clear
UP/DOWN
settings.
Press
QUICK/JOG to clear the set value of
UP/DOWN.
5:Coast to stop. Press QUICK/JOG to
coast to stop.
6:Shift the given manner of running
commands. Press QUICK/JOG to shift
the given manner of running commands.
7:Quick
commission
mode(committee
according to the non-factory parameter)
7.3 Vector control
Because asynchronous motors have the characteristics of high stage, nonlinear, strong coupling
and various variables, the actual control of the asynchronous motor is very difficult. Vector control
is mainly used to settle this problem with the theme of that divide the stator current vector into
exciting current (the current heft generating internal magnetic field of the motor) and torque current
(the current heft generating torque) by controlling and measuring the stator current vector
according to the principles of beamed magnetic field to control the range and phase of these two
hefts. This method can realize the decoupling of exciting current and torque current to adjust the
high performance of asynchronous motors.
Goodrive300 series inverters are embedded speedless sensor vector control calculation for driving
both asynchronous motors and synchronous motors. Because the core calculation of vector
control is based on exact motor parameter models, the accuracy of motor parameter will impact on
the performance of vector control. It is recommended to input the motor parameters and carry out
autotune before vector running.
Because the vector control calculation is vary complicated, high technical theory is needed for the
user during internal autotune. It is recommended to use the specific function parameters in vector
control with cautions.
146
Goodrive300 inverters
Function
code
Basic operation instruction
Name
Detailed instruction of parameters
Default
value
0: Sensorless vector control mode 0
(applying to AM,SM)
P00.00
Speed control mode
1: Sensorless vector control mode 1
1
(applying to AM)
2:V/F control (applying to AM,SM)
0:No operation
P00.15
Motor parameter
1:Rotation autotuning
autotuning
2:Static autotuning 1
0
3: Static autotuning 2
P02.00
Motor type 1
0:Asynchronous motor
0
1:Synchronous motor
P03.00
Speed loop proportional
0~200.0
20.0
gain1
P03.01
Speed loop integral time1 0.000~10.000s
0.200s
P03.02
Low switching frequency
0.00Hz~P03.05
5.00Hz
P03.03
Speed loop proportional
0~200.0
147
20.0
Goodrive300 inverters
Function
code
Basic operation instruction
Name
Detailed instruction of parameters
Default
value
gain 2
P03.04
Speed loop integral time 2 0.000~10.000s
P03.05
High switching frequency
P03.06
Speed output filter
0.200s
P03.02~P00.03(the Max. frequency)
0~8( corresponds to 0~28/10ms)
10.00Hz
0
Vector control
P03.07
electromotion slip
50%~200%
100%
50%~200%
100%
0~65535
1000
0~65535
1000
compensation coefficient
P03.08
Vector control brake slip
compensation coefficient
P03.09
P03.10
Current loop percentage
coeffient P
Current loop integral
coefficient 1
0:Torque control is invalid
1:Keypad setting torque(P03.12)
2:Analog AI1 setting torque
3:Analog AI2 setting torque
4:Analog AI3 setting torque
5:Pulse frequency HDI setting torque
6: Multi-stage torque setting
P03.11
Torque setting method
7:MODBUS
communication
setting
torque
8:PROFIBUS
communication
0
setting
torque
9:Ethernet communication setting torque
10:CAN communication setting torque
Note: 100% of Setting methods 2~10,
corresponds to three times of the rated
current of the motor.
P03.12
Keypad setting torque
P03.13
Torque given filter time
-300.0%~300.0%(rated current of the
motor)
0.000~10.000s
148
50.0%
0.100s
Goodrive300 inverters
Function
code
Basic operation instruction
Name
Detailed instruction of parameters
Default
value
0:Keypad
setting
upper-limit
frequency(P03.16)
1:Analog
AI1
setting
upper-limit
AI2
setting
upper-limit
AI3
setting
upper-limit
frequency
2:Analog
frequency
3:Analog
frequency
4:Pulse frequency HDI setting upper-limit
Torque control forward
P03.14
rotation upper-limit
frequency setting saurce
selection
frequency
5:Multi-stages
setting
upper-limit
frequency
6:MODBUS
communication
0
setting
upper-limit frequency
7:PROFIBUS
communication
setting
upper-limit frequency
8:Ethernet
communication
setting
upper-limit frequency
9:CAN communication setting upper-limit
frequency
Note:setting
method
1~9,100%
corresponds to the maximum frequency
Torque control reverse
P03.15
rotation upper-limit
frequency keypad defined
value
0:Keypad setting upper-limit frequency
(P03.17 setting)
0
1~9:the same as P03.14
Torque control forward
P03.16
rotation upper-limit
frequency keypad defined Setting
value
P03.17
range:0.00Hz~P00.03(the
50.00Hz
Maximum frequency)
Torque control reverse
50.00Hz
rotation upper-limit
149
Goodrive300 inverters
Function
code
Basic operation instruction
Detailed instruction of parameters
Name
Default
value
frequency keypad defined
value
0:Keypad
sets
the
upper-limit
of
torque(P03.18 sets the value of P03.16;
P03.19 sets the value of P03.17)
1:Analog AI1 setting torque upper-limit
2:Analog AI2 setting torque upper-limit
3:Analog AI3 setting torque upper-limit
4:Pulse frequency HDI setting torque
upper-limit
Electromotion
P03.18
torque
upper-limit keypad setting
5:MODBUS
communication
setting
torque upper-limit
6:PROFIBUS
0
communication
setting
torque upper-limit
7: Ethernet communication setting torque
upper-limit
8:CAN communication setting torque
upper-limit
Note:setting
means
1~9,100%
corresponds to three times of motor
current.
P03.19
P03.20
P03.21
Brake torque upper-limit
setting saurce selection
0:Keypad setting upper-limit frequency
(P03.21 setting)
1~8:the same as P03.18
Brake torque upper-limit
keypad setting
0
180.0%
0.0~300.0%(rated current of the motor)
Weakening coefficience in
180.0%
constant power zone
The loweat weakening
P03.22
coefficient in Constant
P03.23
The loweat weakening
0.1~2.0
0.3
power zone
10%~100%
150
20%
Goodrive300 inverters
Function
Basic operation instruction
Name
code
Detailed instruction of parameters
Default
value
point in Constant power
zone
P03.24
Max. voltage limit
0.0~120.0%
100.0%
P03.25
Pre-exciting time
0.000~10.000s
0.300s
P17.32
Magnetic flux linkage
0.0~200.0%
0
7.4 V/F control
Goodrive300 series inverters provide internal V/F control which can be used in the cases where it
does not need high control accuracy. It is also recommended to use V/F control when one inverter
drives multiple motors.
Goodrive300 series inverters provide multiple V/F curve modes. The user can select the
corresponding V/F curve to the site needs. Or they can set the corresponding V/F curve to their
own needs.
Recommendations:
For the load of constant torque, such as the conveyor belt which runs linearly. It is properly to
select linear V/F curve because it needs constant torque.
For the load of decreasing torque, such as fans and water pumps, it is properly to select
corresponding 1.3th, 1.7th or 2th power of V/F curve because the actual torque is 2-squared or
3-squared of the rotating speed.
Goodrive300 series inverters provide multi-dots V/F curve, the user can change the output V/F
curve by setting the voltage and frequency of three middle dots. The whole curve is comsisted of
5 dots. The starting dot is (0Hz, 0V), and the ending dot is (the basic frequency of the motor, the
rated voltage of the motor). During the setting processing: 0≤f1≤f2≤f3≤the basic frequency of the
motor; 0≤V1≤V2≤V3≤the rated voltage of the motor.
151
Goodrive300 inverters
Basic operation instruction
Goodrive300 series inverters provide special function code for V/F control mode which can
improve the performance of V/F control by means of setting.
1. Torque boost
Torque boost function can compensate the performance of low speed torque during V/F control.
The inverter will adjust the torque boost according to the actual load.
Note:
The torque boost takes effect only when the frequency is under the cap frequency of the boost.
If the torque boost is too big, low frequency vibration or overcurrent fault may occur. Please lower
the torque boost.
2. Energy-saving running
In the actual operation, the inverter can search by itself to achieve a better effect point. The
inverter can work with high effect to save energy.
Note:
This function is usually used in the cases where the load is light or empty.
If the load transients frequently, this function is not appropriate to be slected.
3. V/F slips compensation gain
V/F control belongs to the open loop mode. If the load of the motor transients suddenly, the
fluctuation of the rotation speed may occur. In the cases where the high accuracy speed is
needed, slip compensation gain (internal output adjustment) can be set to compensate the
speed change caused by load fluctuation.
152
Goodrive300 inverters
Basic operation instruction
Setting range of slip compensation gain: 0~200%, of which 100% corresponds to the rated slip
frequency.
Note: Rated slip frequency= (rated synchronous rotation speed of the motor-rated rotation
speed of the motor) *number of pole pairs/60.
4. Vibration control
Motor vibration occurs frequently when applying V/F control mode in the cases where high
power is needed. In order to settle this problem, Goodrive300 series inverters add two function
codes which are set to control the vibration factors. The user can set the corresponding function
code according to the vibration frequency.
Note: Bigger the set value, more effective is the control. If the set value is too big, overcurrent
may occur to the motor.
5. User-defined V/F curve (V/F seperation) function
When the user selects the user-defined V/F curve function in Goodrive300 series inverters, they
can set the given channel of voltage and frequency and the corresponding ACC/DEC time, or the
two can combinate to form a real-time curve.
Note: the application of V/F curve separation can be used in many cases with various kinds of
power supply of the inverter. But the users should set and adjust the parameters with caution.
Incorrect parameters may cause damage to the inverter.
Function
code
Name
Detailed instruction of parameters
Default
value
0: Sensorless vector control mode 0
P00.00
Speed control mode
(applying to AM,SM)
153
1
Goodrive300 inverters
Function
code
Basic operation instruction
Name
Detailed instruction of parameters
Default
value
1: Sensorless vector control mode 1
(applying to AM)
2:V/F control (applying to AM,SM)
P00.03
P00.04
P00.05
Max. output frequency
Upper limit of the running
frequency
Lower limit of the running
frequency
P00.04~400.00Hz
50.00Hz
P00.05~P00.03
50.00Hz
0.00Hz~P00.04
0.00Hz
P00.11
ACC time 1
0.0~3600.0s
P00.12
DEC time 1
0.0~3600.0s
Depend
on model
Depend
on model
P02.00
P02.02
P02.04
Motor type 1
Asynchronous motor 1
rated power
Asynchronous motor 1
rated voltage
0:Asynchronous motor
0
1:Synchronous motor
0.01Hz~P00.03(Max frequency
50.00
Depend
0~1200V
on model
1:Multi-dots V/F curve
2:1.3th power low torque V/F curve
P04.00
Motor 1V/F curve setting
3:1.7th power low torque V/F curve
0
4:2.0th power low torque V/F curve
5:Customized V/F(V/F separation)
P04.01
P04.02
P04.03
Motor 1 torque boost
Motor 1 torque boost close
Motor 1V/F
0.0%:(automatic)0.1%~10.0%
0.0%~50.0%(the
motor 1)
0.00Hz~P04.05
rated
frequency
0.0%
of
20.0%
0.00Hz
Frequency point 1
P04.04
P04.05
Motor 1V/F voltage point 1 0.0%~110.0%
Motor 1V/F
P04.03~ P04.07
Frequency point 2
154
00.0%
00.00Hz
Goodrive300 inverters
Function
code
P04.06
P04.07
P04.08
P04.09
Basic operation instruction
Name
Detailed instruction of parameters
value
Motor 1V/F voltage point 2 0.0%~110.0%
Motor 1V/F
Frequency point 3
P04.05~ P02.02 or P04.05~ P02.16
Motor 1V/F voltage point 3 0.0%~110.0%
Motor 1V/F slip
Default
0.0~200.0%
00.0%
00.00Hz
00.0%
0.0%
compensation gain
P04.10
P04.11
P04.12
Motor 1 low frequency
vibration control factor
Motor 1 high frequency
vibration control factor
Motor 1 vibration control
0~100
10
0~100
10
0.00Hz~P00.03 (the Max. frequency)
30.00 Hz
threshold
0:Linear V/F curve
1:Multi-dots V/F curve
P04.13
Motor 2V/Fcurve setting
2:1.3th power of torque V/F curve
3:1.7 th power of torque V/F curve
0
4:2.0 th power of torque V/F curve
5:self-defined V/F(V/Fseperation )
P04.14
P04.15
P04.16
P04.17
P04.18
Motor 2 torque boost
0.0%: (automatic) 0.1%~10.0%
Motor 2 torque boost close 0.0%~50.0%(rated frequency of motor 1)
Motor 2V/F frequency
point 1
0.00Hz~P04.05
Motor 2V/F voltage point 1 0.0%~110.0%
Motor 2V/F frequency
P04.03~ P04.07
0.0%
20.0%
0.00Hz
00.0%
00.00Hz
point 2
P04.19
P04.20
Motor 2V/F voltage point 2 0.0%~110.0%
Motor 2V/F frequency
P04.05~ P02.02 or P04.05~ P02.16
00.0%
00.00Hz
point 3
P04.21
P04.22
Motor 2V/F voltage point 3 0.0%~110.0%
Motor 2V/F slip
compensation gain
0.0~200.0%
155
00.0%
0.0%
Goodrive300 inverters
Function
code
P04.23
P04.24
Basic operation instruction
Name
Motor 2 low frequency
vibration control factor
Motor 2 high frequency
Detailed instruction of parameters
Default
value
0~100
10
0~100
10
vibration control factor
P04.25
P04.26
Motor 2 vibration control
threshold
Energy-saving running
selection
0.00Hz~P00.03 (the Max. frequency)
30.00 Hz
0: no action
0
1: automatic energy-saving running
0:Keypad seting voltage: the output
voltage is determined by P04.28.
1:AI1setting voltage ;
2:AI2 setting voltage;
3:AI3 setting voltage;
4:HDI1 setting voltage;
5:Multi-stes setting voltage;
P04.27
Voltage Setting Channal
selection
6:PID setting voltage;
7:MODBUS
communication
setting
0
voltage;
8:PROFIBUS
communication
setting
voltage;
9:Ethernet
communication
setting
voltage;(Reversed)
10:CAN communication setting voltage;
(Reversed)
P04.28
Keypad setting voltage
0.0%~100.0%(the
rated
voltage
of
motor)
100.0%
P04.29
Voltage increasing time
0.0~3600.0s
5.0s
P04.30
Voltage decreasing time
0.0~3600.0s
5.0s
P04.31
Output maximum voltage
P04.32
Output minimum voltage
P04.32~100.0%(the rated voltage of
motor)
0.0%~P04.31(the rated voltage of motor)
156
100.0%
0.0%
Goodrive300 inverters
Basic operation instruction
7.5 Torque control
Goodrive300 series inverters support two kinds of control mode: torque control and rotation speed
control. The core of rotation speed is that the whole control focuses on the stable speed and
ensures the setting speed is the same as the actual running speed. The Max. Load sould be in the
range of the torque limit. The core of torque control is that the whole control focues on the stable
torque and ensures the setting torque is the same as the actual output torque. At the same time,
the output frequency is among the upper limit or the lower limit.
157
Goodrive300 inverters
Function
code
Name
Basic operation instruction
Detailed instruction of parameters
Default
value
0: Sensorless vector control mode 0 (applying
to AM,SM)
1: Sensorless vector control mode 1 (applying
P00.00
Speed control
mode
1
to AM)
2:V/F control (applying to AM,SM)
Note:AM-Asynchronous motor SMsynchronous motor
0:Torque control is invalid
1:Keypad setting torque(P03.11)
2:Analog AI1 setting torque(100% corresponds
to 3 times of the motor current)
3:Analog AI2 setting torque(100% corresponds
to 3 times of the motor current)
4:Analog AI3 setting torque(100% corresponds
to 3 times of the motor current)
5:Pulse frequency HDI setting torque(100%
corresponds to 3 times of the motor current)
P03.11
Torque setting
method
6: Multi-stage torque setting(100% corresponds
to 3 times of the motor current)
0
7:MODBUS communication setting
torque(100% corresponds to 3 times of the
motor current)
8:PROFIBUS communication setting
torque(100% corresponds to 3 times of the
motor current)
9:Ethernet communication setting torque(100%
corresponds to 3 times of the motor current)
10:CAN communication setting torque(100%
corresponds to 3 times of the motor current)
P03.12
Keypad setting
torque
-300.0%~300.0%( the rated current of the
motor)
158
50.0%
Goodrive300 inverters
Function
code
P03.13
Basic operation instruction
Name
Torque given filter
Detailed instruction of parameters
0.000~10.000s
time
Default
value
0
0:Keypad setting upper-limit frequency(P03.16)
1:Analog AI1 setting upper-limit frequency
(100% corresponds to the max. frequency)
2:Analog AI2 setting upper-limit
frequency(100% corresponds to the max.
frequency)
3:Analog AI3 setting upper-limit
frequency(100% corresponds to the max.
frequency)
4:Pulse frequency HDI setting upper-limit
frequency(100% corresponds to the max.
Torque control
forward
P03.14
rotation
upper-limit
frequency)
5:Multi-stage setting upper-limit
frequency(100% corresponds to the max.
frequency setting
frequency)
source selection
6:MODBUS communication setting upper-limit
0
frequency(100% corresponds to the max.
frequency)
7:PROFIBUS communication setting upper-limit
frequency (100% corresponds to the max.
frequency)
8:Ethernet communication setting upper-limit
frequency (100% corresponds to the max.
frequency)
9:CAN communication setting upper-limit
frequency(100% corresponds to the max.
frequency)
Torque control
P03.15
reverse
rotation
upper-limit
0:Keypad setting upper-limit frequency(P03.17)
1:Analog AI1 setting upper-limit frequency
(100% corresponds to the max. frequency)
159
0
Goodrive300 inverters
Function
code
Basic operation instruction
Name
Detailed instruction of parameters
frequency setting
2:Analog AI2 setting upper-limit
source selection
frequency(100% corresponds to the max.
Default
value
frequency)
3:Analog AI3 setting upper-limit
frequency(100% corresponds to the max.
frequency)
4:Pulse frequency HDI setting upper-limit
frequency(100% corresponds to the max.
frequency)
5:Multi-stage setting upper-limit
frequency(100% corresponds to the max.
frequency)
6:MODBUS communication setting upper-limit
frequency(100% corresponds to the max.
frequency)
7:PROFIBUS communication setting upper-limit
frequency (100% corresponds to the max.
frequency)
8:Ethernet communication setting upper-limit
frequency (100% corresponds to the max.
frequency)
9:CAN communication setting upper-limit
frequency(100% corresponds to the max.
frequency)
Torque control
forward
P03.16
rotation
upper-limit
0.00Hz~P00.03 (the Max. frequency)
50.00 Hz
0.00 Hz~P00.03 (the Max. frequency)
50.00 Hz
frequency keypad
defined value
Torque control
P03.17
reverse
rotation
upper-limit
160
Goodrive300 inverters
Function
code
Name
Basic operation instruction
Detailed instruction of parameters
Default
value
frequency keypad
defined value
0:Keypad setting upper-limit frequency(P03.20)
1:Analog AI1 setting upper-limit frequency
(100% corresponds to three times of the rated
current of the motor)
2:Analog AI2 setting upper-limit
frequency(100% corresponds to three times of
the rated current of the motor)
3:Analog AI3 setting upper-limit
frequency(100% corresponds to three times of
the rated current of the motor)
Electromotion
P03.18
torque upper-limit
setting source
selection
4:Pulse frequency HDI setting upper-limit
frequency(100% corresponds to three times of
the rated current of the motor)
0
5:MODBUS communication setting upper-limit
frequency(100% corresponds to three times of
the rated current of the motor)
6:PROFIBUS communication setting upper-limit
frequency (100% corresponds to three times of
the rated current of the motor)
7:Ethernet communication setting upper-limit
frequency (100% corresponds to three times of
the rated current of the motor)
8:CAN communication setting upper-limit
frequency(100% corresponds to three times of
the rated current of the motor)
0:Keypad setting upper-limit frequency(P03.21)
Brake torque
P03.19
upper-limit setting
source selection
1:Analog AI1 setting upper-limit frequency
(100% corresponds to three times of the rated
current of the motor)
2:Analog AI2 setting upper-limit
161
0
Goodrive300 inverters
Function
code
Basic operation instruction
Name
Detailed instruction of parameters
Default
value
frequency(100% corresponds to three times of
the rated current of the motor)
3:Analog AI3 setting upper-limit
frequency(100% corresponds to three times of
the rated current of the motor)
4:Pulse frequency HDI setting upper-limit
frequency(100% corresponds to three times of
the rated current of the motor)
5:MODBUS communication setting upper-limit
frequency(100% corresponds to three times of
the rated current of the motor)
6:PROFIBUS communication setting upper-limit
frequency (100% corresponds to three times of
the rated current of the motor)
7:Ethernet communication setting upper-limit
frequency (100% corresponds to three times of
the rated current of the motor)
8:CAN communication setting upper-limit
frequency(100% corresponds to three times of
the rated current of the motor)
Electromotion
P03.20
torque upper-limit
0.0~300.0%( rated current of the motor)
180.0%
0.0~300.0%( rated current of the motor)
180.0%
keypad setting
Brake torque
P03.21
upper-limit keypad
P17.09
Output torque
P17.15
Torque given value
setting
-250.0~250.0%
0.0%
-300.0~300.0%( rated current of the motor)
7.6 Parmeters of the motor
Physical accident may occur if the motor starts up suddenly during
autotune. Please check the safety of surrounding environment of the
162
Goodrive300 inverters
Basic operation instruction
motor and the load before autotune.
The power is still applied even the motor stops running during static
autotune. Please do not touch the motor until the autotune is
completed, otherwise there would be electric shock.
Do not carry out the rotation autotune if the motor is coupled with the
load, please do not operate on the rotation autotune. Otherwise
misaction or damage may occur to the inverter or the mechanical
devices. When carry out autotune on the motor which is coupled with
load, the motor parameter won’t be counted correctly and misaction
may occur. It is proper to de-couple the motor from the load during
autotune when necessary.
Goodrive300 series inverters can drive both asynchronous motors and synchronous motors. And
at the same time, they can support two sets of motor parameters which can shift between two
motors through multi-function digital input terminal or communication.
The control performance of the inverter is based on the established accurate motor model. The
user has to carry out the motor autotune before first running (take motor 1 as the example).
Note:
1. Set the motor parameters according to the name plate of the motor.
2. During the motor autotune, de-couple the motor form the load if rotation autotune is selected to
make the motor is in a static and empty state, otherwise the result of autotune is incorrect. The
asynchronous motors can autotune the parameters of P02.06~P02.10, while the synchronous
163
Goodrive300 inverters
Basic operation instruction
motors can autotune the parameters of P02.20~P02.23.
3. During the motor autotune, do not to de-couple the motor form the load if static autotune is
selected. Because only some parameters of the motor are involved, the control performance is not
as better as the rotation autotune.
The asynchronous motors can autotune the parameters of
P02.06~P02.10, while the synchronous motors can autotune the parameters of P02.20~P02.22.
P02.23 (synchronous motor 1 counter-electromotive force constant) can be counted to attain.
4. Motor autotune only involves the current motor. Switch the motor through P08.31 to carry out the
autotune on the other motor.
Relative parameters list:
Function
code
Name
Detailed instruction of parameters
Default
value
0:Keypad running command
channel(“LOCAL/REMOT” light off)
P00.01
Running command
channel
1:Terminal running command channel
(“LOCAL/REMOT” flickering)
2:Communication
running
1
command
channel (“LOCAL/REMOT” on);
0:No operation
P00.15
Motor parameter
1:Rotation autotuning
autotuning
2:Static autotuning 1
0
3: Static autotuning 2
P02.00
P02.01
P02.02
P02.03
P02.04
P02.05
P02.06
P02.07
Motor type 1
Asynchronous motor 1
rated power
Asynchronous motor 1
rated power
Asynchronous motor 1
rated rotating speed
Asynchronous motor 1
rated voltage
Asynchronous motor 1
rated current
Asynchronous motor 1
stator resistor
Asynchronous motor 1
0:Asynchronous motor
1:Synchronous motor
0.1~3000.0kW
0.01Hz~P00.03(the Max frequency)
1~36000rpm
0~1200V
0.8~6000.0A
0.001~65.535Ω
0.001~65.535Ω
164
0
Depend
on model
50.00Hz
Depend
on model
Depend
on model
Depend
on model
Depend
on model
Depend
Goodrive300 inverters
Function
code
Basic operation instruction
Name
Detailed instruction of parameters
rated power rotor resistor
P02.08
P02.09
P02.10
P02.15
P02.16
P02.17
P02.18
P02.19
P02.20
P02.21
Asynchronous motor 1
magnetic leakage
Asynchronous motor
1mutual inductance
Asynchronous motor 1
non-load current
Synchronous motor 1
rated power
Synchronous motor 1
rated frequency
Synchronous motor 1
number of poles pairs
Synchronous motor 1
rated voltage
Synchronous motor 1
rated current
Synchronous motor 1
stator resistor
Synchronous motor 1
direct axis inductance
quadrature axis
0.1~6553.5mH
0.1~6553.5mH
0.1~6553.5A
0.1~3000.0kW
0.01Hz~P00.03(the Max. frequency)
1~50
0~1200V
0.8~6000.0A
0.001~65.535Ω
0.1~6553.5mH
0.1~6553.5mH
inductance
P02.23
Synchronous motor 1
Back EMF constant
value
on model
Synchronous motor 1
P02.22
Default
0~10000
Depend
on model
Depend
on model
Depend
on model
Depend
on model
50.00Hz
2
Depend
on model
Depend
on model
Depend
on model
Depend
on model
Depend
on model
300
Multi-function digital input
P05.01~P0
terminals
5.09
(S1~S8, HDI) function
35: Shift from motor 1 to motor 2
selection
The shifting channel
P08.31
between motor 1 and
motor 2
LED ones:
0: terminal shifting; digital terminal is 35
1: MODBUS communication shifting
2: PROFIBUS communication shifting
165
0
Goodrive300 inverters
Function
code
Basic operation instruction
Name
Detailed instruction of parameters
Default
value
3: Ethernet communication shifting
4: CAN communication shifting
P12.00
P12.01
P12.02
P12.03
Motor type 2
Asynchronous motor 2
rated power
Asynchronous motor 2
rated frequency
Asynchronous motor 2
rated rotation speed
0:Asynchronous motor
1:Synchronous motor
0.1~3000.0kW
0.01Hz~P00.03(the Max. frequency)
1~36000rpm
Asynchronous motor 2
P12.04
rated
0~1200V
voltage
Asynchronous motor 2
P12.05
rated
0.8~6000.0A
current
P12.06
P12.07
P12.08
P12.09
P12.10
P12.15
Asynchronous motor 2
rotor resistance
Asynchronous motor 2
stator resistance
Asynchronous motor 2
leakage
Asynchronous motor 2
mutual induction
Asynchronous motor 2
noload current
Synchronous motor 2
rated power
0.001~65.535Ω
0.001~65.535Ω
0.1~655.35mH
0.1~655.35mH
0.1~6553.5A
0.1~3000.0kW
0
Depend
on model
50.00Hz
Depend
on model
Depend
on model
Depend
on model
Depend
on model
Depend
on model
Depend
on model
Depend
on model
Depend
on model
Depend
on model
Synchronous motor 2
P12.16
rated
0.01Hz~P00.03(the Max. frequency)
50.00Hz
frequency
P12.17
P12.18
Synchronous motor 2
pority pairs
Synchronous motor 2
1~50
0~1200V
166
2
Depend
Goodrive300 inverters
Function
code
Basic operation instruction
Name
Detailed instruction of parameters
rated voltage
rated
0.8~6000.0A
current
P12.20
P12.21
P12.22
Synchronous motor 2
rotor resistance
Synchronous motor 2
d-axis inductor
Synchronous motor 2
quadrature axis inductor
value
on model
Synchronous motor 2
P12.19
Default
0.001~65.535Ω
0.1~6553.5mH
0.1~6553.5mH
Depend
on model
Depend
on model
Depend
on model
Depend
on model
Synchronous motor 2
P12.23
counter-electromotive
force
0~10000
300
constant
7.7 Start-up and stop control
The start-up and stop control of the inverter includes three states: start after the running command
during normal powering on, start after the restarting function becomes valid during normal
powering on and start after the automatic fault reset. Below is the detailed instruction for three
startings.
There are three starting methods for the inverter: start from the starting frequency directly, start
after the AC braking and start after the rotation speed tracking. The user can select according to
different situations to meet their needs.
For the load with big inertia, especially in the cases where the reverse rotation may occur, it is
better to select starting after DC braking and then starting after rotation speed tracking.
Note: it is recommended to use the direct starting to drive synchronous motor.
1. The starting logic figure of starting after the running command during the normal powering on
167
Goodrive300 inverters
Basic operation instruction
2. The starting logic figure of starting after the restarting function becomes valid during the normal
powering on
168
Goodrive300 inverters
Basic operation instruction
3. The starting logic figure of starting after the automatic fault reset
Relative parameters list:
Function
code
Name
Detailed instruction of parameters
Default
value
0:Keypad running command
channel(LED light off)
P00.01
Running command
channel
1:Terminal running command channel
(LED flickering)
2:Communication
running
1
command
channel (LED on)
P00.11
P00.12
ACC time 1
0.0~3600.0s
DEC time 1
0.0~3600.0s
Depend
on model
Depend
on model
0:Start-up directly
P01.00
Start method
1:Start-up after DC braking
0
2: Start-up after rotation speed tracking 1
P01.01
P01.02
Starting frequency of
direct start-up
Retention time of the
0.00~50.00Hz
0.0~50.0s
169
0.50Hz
0.0s
Goodrive300 inverters
Function
code
Basic operation instruction
Name
Detailed instruction of parameters
Default
value
starting frequency
P01.03
P01.04
P01.05
The braking current before
starting
The braking time before
starting
1: Reserved
Reserved
P01.08
Stop manner selection
P01.12
P01.13
0.0s
0:Linear type
P01.07
P01.11
0.0~50.0s
selection
Reserved
P01.10
0.0%
ACC/DEC manner
P01.06
P01.09
0.0~150.0%
The starting frequency of
stop braking
The waiting time of stop
braking
DC braking current during
stopping
DC braking time during
stopping
Dead time of for/rev
rotation
0:Decelerate to stop
1:Coast to stop
0.00Hz~P00.03(the Max. frequency)
0
0
0.00Hz
0.0~50.0s
0.0s
0.0~150.0%
0.0%
0.0~50.0s
0.0s
0.0~3600.0s
0.0s
Set the threshold point of the inverter:
P01.14
Shifting between
FWD/REV rotation
0:Switch after 0 frequency
1:Switch after the starting frequency
0
2: Switch after the speed reach P01.15
and delay for P01.24
P01.15
P01.16
P01.17
P01.18
Stopping speed
Detection of stopping
speed
Detection time of the
feedback speed
Terminal
0.00~100.00Hz
0.10 Hz
0: Speed setting (the only detection
method in V/F mode)
0
1: Speed detecting value
Setting range:0.0~100.0s (only valid
when P01.16=1)
0:The terminal running command is
running protection slection invalid when powering on
170
0.05s
0
Goodrive300 inverters
Function
code
Basic operation instruction
Name
Detailed instruction of parameters
when powering on
1: The terminal running command is
Default
value
valid when powering on
The running frequency is
P01.19
lower than the lower limit
one (valid if the lower limit
frequency is above 0)
P01.20
P01.21
P01.22
P01.23
Hibernation restore delay
time
Restart after power off
The waiting time of restart
after power off
Start delay time
0: Run at the lower-limit frequency
1: Stop
0
2: Hibernation
0.0~3600.0s(valid when P01.15=2)
0: Disable
1: Enable
0.0s
0
0.0~3600.0s(valid when P01.17=1)
1.0s
0.0~60.0s
0.0s
1: Forward rotation operation
2: Reverse rotation operation
4: Forward rotation jogging
5: Reverse rotation jogging
P05.01~P0
Digital input function
5.09
selection
6: Coast to stop
7: Fault reset
8: Operation pause
21:ACC/DEC time option1
22:ACC/DEC time option2
30:ACC/DEC prohibition
P08.06
P08.07
P08.08
P08.00
P08.01
P08.02
Jogging running frequency 0.00~P00.03(the Max. frequency)
Jogging running ACC time
Jogging running DEC time
ACC time 2
DEC time 2
ACC time 3
0.0~3600.0s
5.00Hz
Depend
on model
0.0~3600.0s
Depend
on model
0.0~3600.0s
Depend
on model
0.0~3600.0s
Depend
on model
0.0~3600.0s
Depend
on model
171
Goodrive300 inverters
Function
code
P08.03
P08.04
P08.05
P08.28
P08.29
Basic operation instruction
Name
DEC time 3
ACC time 4
DEC time 4
Times of fault reset
Interval time of automatic
fault reset
Detailed instruction of parameters
0.0~3600.0s
Default
value
Depend
on model
0.0~3600.0s
Depend
on model
0.0~3600.0s
Depend
on model
0~10
0.1~3600.0s
0
1.0s
7.8 Frequency setting
Goodrive300 series inverters can set the frequency by various means. The given channel can be
divided into main given channel and assistant given channel.
There are two mian given channels: A frequency given channel and B frequency given channel.
These two given channels can carry out mutual simple math calculation between each other. And
the given channels can be shifted dynamically through set multi-funciton terminals.
There are three assistane given channels: keypad UP/DOWN input, terminals UP/DOWN switch
input and digital potentiometer input. The three ways equal to the effect of input UP/DOWN given in
internal assistant given of the inverter. The user can enable the given method and the effect of the
method to the frequency given by setting function codes.
The actual given of the inverter is comsisted of main given channel and assistant given channel.
172
Goodrive300 inverters
P00.10
Basic operation instruction
Keypad
P00.06
(A frequency command selection)
Keypad setting frequency
AI1
0
AI2
1
AI3
2
3
HDI
P17.00
Setting
frequency
4
Simple PLC
5
Multi-stage speed
7
PID
8
MODBUS
9
A
P00.04 (the upper limit of the running
frequency)
0
B
1
A+B
10
2
PROFIBUS
+
3
11
A
frequ
ency
com
man
d
Erthernet
CAN
A-B
+
4
Max
5
A B
Min A
P00.10
P17.02
Ramp given frequency
6
P00.05 (the lower limit of the running
frequency)
P00.09
(the setting source combination)
B
Keypad
1
P00.07
B frequency command selection
Keypad setting frequency
AI1
AI2
0
P00.03
0
(the Max. output frequency)
1
AI3
HDI
2
P00.08 (B frequency command reference selection)
3
4
Simple PLC
Multi-stage speed
5
6
7
PID
MODBUS
8
9
10
PROFIBUS
11
Terminal function 33
Frequency increasing/decreasing
setting temporal clear
Erthernet
P17.13
Keypad digital
adjustment
valid
CAN
Terminal function 12
Frequency increasing/decreasing
setting temporal clear
valid
0
0
invalid
Invalid
UP terminal
DOWN terminal
P08.41 unit
UP/DOWN
Digital potentiometer
enabling
0 1
UP/DOWN enabling
Digital
potentiometer
P08.43 unit
UP/DOWN terminal valid
selection
0
UP/DOWN enabling
Digital potentiometer
enabling
P08.43 tens setting
(frequency control selection)
P08.41 tens setting
(frequency control selection)
+
+
Goodrive300 series inverters support the shifting between different given channels, and the
detailed shifting rules is as below:
173
Goodrive300 inverters
Basic operation instruction
Multi-function
Current given
channel
P00.09
terminal function
13
Shifting from A
channel to B
channel
A
B
Multi-function
Multi-function
terminal function
terminal function
14
15
Shifting from
Shifting from
combination
combination
setting to A
setting to B
channel
channel
/
/
B
/
/
/
A+B
/
A
B
A-B
/
A
B
Max(A,B)
/
A
B
Min(A,B)
/
A
B
Note: “/” means the multi-function terminal is invalid under the current given channel.
When select multi-function terminal UP (10) and DOWN (11) to set the internal assistant frequency,
P08.44 and P08.45 can be set to increase or decrease the set frequency quickly.
Relative parameters list:
Function
code
Name
P00.03
Max. output frequency
P00.04
Upper limit of the running
Detailed instruction of parameters
Default
value
P00.04~400.00Hz
50.00Hz
P00.05~P00.03
50.00Hz
174
Goodrive300 inverters
Function
code
Basic operation instruction
Name
Detailed instruction of parameters
Default
value
frequency
P00.05
Lower limit of the running
0.00Hz~P00.04
0.00Hz
frequency
0:Keypad data setting
1:Analog AI1 setting
2:Analog AI2 setting
3:Analog AI3 setting
4:High-speed pulse HDI setting
5:Simple PLC program setting
P00.06
A frequency command
selection
6: Multi-stage speed running setting
7: PID control setting
0
8:MODBUS communication setting
9:PROFIBUS communication setting
10:Ethernet communication
setting(reserved)
11:CAN
communication
setting(reserved)
0:Keypad data setting
1:Analog AI1 setting
2:Analog AI2 setting
3:Analog AI3 setting
4:High-speed pulse HDI setting
5:Simple PLC program setting
P00.07
B frequency command
selection
6: Multi-stage speed running setting
7: PID control setting
1
8:MODBUS communication setting
9:PROFIBUS communication setting
10:Ethernet communication
setting(reserved)
11:CAN communication
setting(reserved)
P00.08
P00.09
B frequency command
reference selection
Combination type of the
0:The Max. output frequency
1:A frequency command
0:A
0
0
175
Goodrive300 inverters
Function
code
Basic operation instruction
Name
setting source
Default
Detailed instruction of parameters
value
1:B
2:(A+B)combination
3:(A-B)combination
4:Max(A,B)combination
5:Min(A,B)combination
10:Increasing frequency setting(UP)
11:Decreasing
Multi-function digital input
P05.01~P0
5.09
terminals
(S1~S8,HDI) function
selection
frequency
setting(DOWN)
12:Cancel the frequency change setting
13:Shift between A setting and B setting
14:Shift between combination setting
and A setting
15:Shift between combination setting
and B setting
0x000~0x1223
LED ones:frequency enable selection
0:Both
∧ / ∨
keys
and
digital
potentiometer adjustments are effective
1:Only ∧ / ∨
keys adjustments is
effective
2:Only digital potentiometer adjustments
is effective
3:Neither
P08.42
Keypad data control setting
∧ / ∨
keys
nor
digital
potentiometer adjustments are effective
LED tens: frequency control selection
0:Only
effective when P00.06=0
or
P00.07=0
1:Effective for
all
frequency setting
manner
2:Ineffective for multi-stage speed when
multi-stage speed has the priority
LED hundreds: action selection during
stopping
0:Setting is valid
176
0x0000
Goodrive300 inverters
Function
code
Basic operation instruction
Name
Default
Detailed instruction of parameters
value
1:Valid during running, cleared after
stopping
2:Valid during running, cleared after
receiving the stop command
LED thousands: ∧/∨ keys and digital
potentiometer Integral function
0:The Integral function is effective
1:The Integral function is ineffective
P08.43
Keypad data potentiometer
integral ratio
0.01~10.00s
0.10s
0x00~0x221
LED ones: frequency control selection
0:UP/DOWN terminals setting effective
1:UP/DOWN terminals setting ineffective
LED tens: frequency control selection
0:Only
effective when P00.06=0
or
P00.07=0
P08.44
UP/DOWN terminals
control setting
1:All frequency means are effective
2:When the multi-stage are priority, it is
0x000
ineffective to the multi-stage
LED hundreds: action selection when
stop
0:Setting effective
1:Effective in the running, clear after stop
2:Efective in the running, clear after
receiving the stop commands
P08.45
P08.46
P17.00
P17.02
UP terminals frequency
changing ratio
DOWN terminals
frequency changing ratio
Set frequency
0.01~50.00Hz/s
0.50 Hz/s
0.01~50.00 Hz/s
0.50 Hz/s
0.00Hz~P00.03
(the
Max.
output
(the
Max.
output
frequency)
Ramp given frequency
0.00Hz~P00.03
frequency)
177
0.00Hz
0.00Hz
Goodrive300 inverters
Basic operation instruction
Function
Name
code
Detailed instruction of parameters
Default
value
Display the adjustment through the
P17.14
Digital adjustment
keypad of the inverter.
0.00V
Range : 0.00Hz~P00.03
7.9 Analog input
Goodrive300 series inverters have three analog input terminals and 1 high-speed pulse input
terminals (of which, AI1 and AI2 are 0~10V/0~20mA and Al can select voltage input or current input
by J1, A2 can select voltage input or current input by J2 and AI3 is for -10~10V ) as the standard
configuration. The inputs can be filtered and the maximum and minimum values can be adjusted.
AI1 input voltage
Analog curve input setting
P17.15
AI1
AI2 input voltage
Analog input filter
P05.32
P05.33
P05.34
P05.35
P05.36
P17.16
AI2
AI3 input voltage
P05.37
P05.38
P05.39
P05.40
P05.41
P17.17
P05.42
P05.43
P05.44
P05.45
P05.46
P05.47
AI3
P05.48
AI3
HDI input frequency
P17.18
0
AI1/AI2/HDI
0
HDI
P05.50
P05.51
P05.52
P05.53
1
1
2
P05.00
HDI input type selection
P05.00
P05.49
HDI high speed pulse input function selection
0: HDI is high speed pulse input
1: HDI is switch input
P05.49
0: frequency setting input
1: counter input
2: length counter input
Relative parameters list:
178
P05.54
Goodrive300 inverters
Function
code
P05.00
P05.32
P05.33
P05.34
P05.35
P05.36
P05.37
P05.38
P05.39
P05.40
P05.41
P05.42
P05.43
P05.44
P05.45
P05.46
P05.47
P05.48
Basic operation instruction
Name
Detailed instruction of parameters
HDI input type selection
Lower limit of AI1
Corresponding setting of
the lower limit of AI1
Upper limit of AI1
Corresponding setting of
the upper limit of AI1
AI1 input filter time
Lower limit of
AI2
Corresponding setting of
the lower limit of AI2
Upper limit of AI2
Corresponding setting of
the upper limit of AI2
AI2 input filter time
Lower limit of
AI3
Corresponding setting of
the lower limit of AI3
middle value of AI3
Corresponding middle
setting of
AI3
Upper limit of AI3
Corresponding setting of
the upper limit of AI3
AI3 input filter time
0:HDI is high pulse input
P05.49
input function
selection
value
0
1:HDI is switch input
0.00V~P05.25
0.00V
0.0%
-100.0%~100.0%
P05.23~10.00V
10.00V
100.0%
-100.0%~100.0%
0.000s~10.000s
0.100s
0.00V
0.00V~P05.30
-100.0%~100.0%
0.0%
P05.28~10.00V
10.00V
-100.0%~100.0%
100.0%
0.000s~10.000s
0.100s
-10.00V~P05.35
-10.00V
-100.0%~100.0%
-100.0%
P05.33~P05.37
0.00V
-100.0%~100.0%
0.0%
P05.35~10.00V
10.00V
-100.0%~100.0%
100.0%
0.000s~10.000s
0:Fquency
HDI high-speed pulse
Default
setting
0.100s
input,
frequency
setting source
1:Cunter input, high-speed pulse counter
input terminals
2:Length counting input, length counter
input terminals
179
0
Goodrive300 inverters
Function
Name
code
P05.50
P05.51
P05.52
Basic operation instruction
Lower limit frequency of
HDI
Corresponding setting of
HDI low frequency setting
Upper limit frequency of
HDI
Detailed instruction of parameters
Default
value
0.00 kHz ~ P05.43
0.00kHz
-100.0%~100.0%
0.0%
P05.41 ~50.00kHz
50.00kHz
-100.0%~100.0%
100.0%
0.000s~10.000s
0.100s
Corresponding setting of
P05.53
upper limit frequency of
HDI
P05.54
HDI frequency input filter
time
7.10 Analog output
Goodrive300 series inverters have 2 analog output terminals (0~10V or 0~20mA) and 1 high speed
pulse output terminal. Analog output signal can be filtered and the maximum and minimum values
can be adjusted. The analog output signals can be proportional to motor speed, output frequency,
output current, motor torque, motor power, etc.
Output instructions:
180
Goodrive300 inverters
Basic operation instruction
Set value
Function
0
Running frequency
0~the Max. output frequency
1
Set frequency
0~ the Max. output frequency
2
Ramp given frequency
0~ the Max. output frequency
3
Running rotation speed
4
5
Output current (relative to the
inverter)
Output current (relative to the
motor)
Instructions
0~2 times of the rated synchronous rotation speed of
the motor
0~2 times of the rated current of the inverter
0~2 times of the rated current of the inverter
6
Output voltage
0~1.5 times of the rated voltage of the inverter
7
Output power
0~2 times of the rated power
8
Set torque
0~2 times of the rated current of the motor
9
Output torque
0~2 times of the rated current of the motor
10
AI1
0~10V/0~20mA
11
AI2
0~10V/0~20mA
12
AI3
-10V~10V
HDI
0.00~50.00kHz
13
14
15
16
17
18
MODBUS communication set
value 1
-1000~1000,1000 corresponds to 100.0%
MODBUS communication set -1000~1000,1000 corresponds to 100.0%
value 2
PROFIBUS communication
-1000~1000,1000 corresponds to 100.0%
set value 1
PROFIBUS communication
-1000~1000,100 corresponds to 100.0%
set value 2
Torque current(relative to the 0~2 times of the rated current of the motor
rated current of the motor)
Exciting current (relative to
19
the rated current of the
20
Reserved
0~2 times of the rated current of the motor
motor)
Relative parameters list:
Function
code
P06.00
Name
HDO output type
Detailed instruction of parameters
Default
value
0:Open collector pole high speed pulse
181
0
Goodrive300 inverters
Function
code
Basic operation instruction
Detailed instruction of parameters
Name
Default
value
output
1: Open collector pole output
P06.14
P06.15
AO1 output selection
0:Running frequency
0
AO2 output selection
1:Set frequency
0
2:Ramp reference frequency
3:Running rotation speed
4:Output current (relative to the rated
current of the inverter)
5:Output current(relative to the rated
current of the motor)
6:Output voltage
7:Output power
8:Set torque value
9:Output torque
10:Analogy AI1 input value
11:Analogy AI2 input value
P06.16
HDO high-speed pulse
output selection
12:Analogy AI3 input value
0
13:High speed pulse HDI input value
14:MODBUS communication set value 1
15:MODBUS communication set value 2
16:PROFIBUS communication set value
1
17:PROFIBUS communication set value
2
18:Torque current(relative to the rated
current of the motor)
19:Pre-magnetizing current(relative to
the rated current of the motor)
20:Reserved
P06.17
P06.18
Lower limit of AO1 output
0.0%~P06.15
Corresponding AO1
0.00V~10.00V
output to the lower limit
P06.19
Upper limit of AO1 output
P06.20
The corresponding AO1
0.0%
0.00V
P06.13~100.0%
100.0%
0.00V~10.00V
10.00V
182
Goodrive300 inverters
Function
Basic operation instruction
Name
code
Detailed instruction of parameters
Default
value
output to the upper limit
P06.21
AO1 output filter time
P06.22
Lower limit of AO2 output
0.0%~P06.20
Corresponding AO2
0.00V~10.00V
P06.23
P06.24
P06.25
P06.26
P06.27
P06.28
P06.29
P06.30
P06.31
0.000s~10.000s
output to the lower limit
Upper limit of AO2 output
Corresponding AO2
P06.18~100.0%
0.00V~10.00V
output to the upper limit
AO2 output filter time
0.000s~10.000s
Lower limit of HDO output 0.0%~P06.25
Corresponding HDO
0.00~50.00kHz
output to the lower limit
Upper limit of HDO output P06.23~100.0%
Corresponding HDO
0.00~50.00kHz
output to the upper limit
HDO output filter time
0.000s~10.000s
0.000s
0.0%
0.00V
100.0%
10.00V
0.000s
0.00%
0.0kHz
100.0%
50.00kHz
0.000s
7.11 Digital input
Goodrive300 series inverters have 8 programmable digital input terminals and 1 open circuit
electrode output terminal in the standard configuration. All functions of the digital input terminals
are programmable by the function codes. Open collector pole input can be selected into high
speed pulse input terminal or common switch input terminal by function code. When selected into
HDI, the user can select HDI high speed pulse input as frequency given, counting input or length
pulse input by setting.
183
Goodrive300 inverters
Basic operation instruction
This parameter is used to set the function corresponds to the digital multi-function terminals.
Note: two different multi-function terminals can not be set as one function.
Set
Function
Instructions
value
The inverter does not work even there is input signal.
0
No function
It is necessary to set the terminal which can not be
used to non-function to avoid misacting.
1
Forward running(FWD)
The forward or reverse rotation of the inverter can be
2
Reverse running(REV)
controlled by the external terminals.
184
Goodrive300 inverters
Set
value
Basic operation instruction
Function
Instructions
The terminal can determine the running mode of the
3
3-wire running control
inverter is 3-wire control mode. Refer to P05.13 for
detailed instruction of 3-wire control mode.
4
Forward jogging
See
5
Reverse jogging
frequency, jogging ACC/DEC time.
P08.06,
P08.07
and
P08.08
for
jogging
The inverter closes off the output. The motor is not
controlled by the inverter during the stopping. This
method is usually to be used when the load inertia is
6
Coast to stop
big and it has no requirement to the stopping time.
It has the same meaning with the “coast to stop” in
P01.08 and usually used in remote control.
External fault reset. It has the same function with the
7
Fault reset
reset function of STOP/RST on the keypad. This
function can realize remote fault reset.
The inverter decelerates to stop. But all running
parameters are in the memory state. For example,
8
Operation pause
PLC parameters, traverse parameters and PID
parameters. After the signal disappears, the inverter
will come back to the state before stopping.
When the external fault signal is sent to the inverter,
9
External fault input
10
Frequency setting up(UP)
This parameter is used to modify the increasing and
Frequency setting
decreasing command during the external terminal
the inverter will report the fault and stop.
12
down(DOWN)
given frequency.
Frequency
12
increasing/decreasing setting
clear
Frequency
increasing/decreasing
setting
clear
terminal can cancel the assistant channel frequency
185
Goodrive300 inverters
Set
value
Basic operation instruction
Function
Instructions
set by the internal UP/DOWN of the inverter to make
the given frequency restore to the frequency given by
the main given frequency channel.
13
14
Shifting between A setting
and B setting
This function can realize the shifting between the
frequency setting channels.
Shifting between A setting
The 13th function can realize the shifting between A
and combination setting
frequency given channel and B frequency given
channel.
The 14th function can realize the shifting between A
frequency given channel and the combination setting
Shifting between B setting
15
and combination setting
channel set by P00.09
The 15th function can realize the shifting between B
frequency given channel and the combination setting
channel set by P00.09
16
Multi-stage speed terminal 1
The 16 stage speeds can be set by the combination of
17
Multi-stage speed terminal 2
digital state of four terminals.
18
Multi-stage speed terminal 3
Note:
multi-stage speed 1is the low
position,
multi-stage speed 4 is the high position.
19
Multi-stage speed terminal 4
20
Multi-stage speed pause
21
ACC/DEC time selection 1
Multi-stag
Multi-stag
Multi-stag
Multi-stage
e speed 4
e speed 3
e speed 2
speed 1
BIT3
BIT2
BIT1
BIT0
Shield the multi-stage speed selection terminal
function to keep the setting value at the current state.
Select 4 ACC/DEC time by the combination of the 2
terminals.
Terminal Terminal
22
ACC/DEC time selection 2
ACC/DEC time
Corresponding
selection
parameter
1
2
OFF
OFF
ACC/DEC time 1 P00.11/P00.12
ON
OFF
ACC/DEC time 2 P08.00/P08.01
OFF
ON
ACC/DEC time 3 P08.02/P08.03
ON
ON
ACC/DEC time 4 P08.04/P08.05
186
Goodrive300 inverters
Set
value
Basic operation instruction
Function
23
Simple PLC stop reset
24
Simple PLC pause
Instructions
Restart simple PLC and clear the memory state of
PLC.
Program pause during PLC implement. Run at the
current speed stage. After cancel the function, simple
PLC continues to run.
25
PID control pause
Temporal PID invalid and the inverter will output at the
current frequency.
26
Traverse pause (stop at the
current frequency)
27
Traverse reset (return to the
middle frequency)
28
Counter reset
29
Torque control enabling
The inverter will stop at the current output and after
canceling the function, the inverter will continue to
traverse run at the current frequency.
The setting frequency of the inverter will come back to
the middle frequency.
Counter clear
The inverter shifts from torque control mode to speed
control mode.
Ensure the inverter will not be affected by the external
30
ACC/DEC disabling
signals (except for the stopping command) and keep
the current output frequency.
31
Counter trigging
32
Length reset
Enable the pulse counter.
Length counter clear
When the terminal closes, the frequency set by
Frequency
33
increasing/decreasing setting
temporal clear
UP/DOWN can be cleared. All set frequency will be
restored into the given frequency by the frequency
command channel and the frequency will come back
to the value after the frequency increasing or
decreasing.
34
DC braking
The inverter will begin DC braking after the valid
command.
35
36
Shifting between motor1 and Motor-shifting can be controlled after the terminal is
motor2
Shift the command to the
valid.
After the function terminal become valid, the running
187
Goodrive300 inverters
Set
value
Basic operation instruction
Function
Instructions
keypad
command channel will be shifted into keypad running
command channel and the running command channel
will come back to the original state if the function
terminal is invalid.
After the function terminal become valid, the running
Shift the command to the
37
terminals
command channel will be shifted into terminal running
command channel and the running command channel
will come back to the original state if the function
terminal is invalid.
After the function terminal become valid, the running
Shift the command to the
38
communication
command channel will be shifted into communication
running command channel and the running command
channel will come back to the original state if the
function terminal is invalid.
39
Pre-excitation command
40
Power consumption clear
Perform pre-exciting if the terminal is valid until the
terminal is invalid.
The power consumption will be cleared after the
command is valid.
41
Power consumption retention
42~60
Reversed
If the command is valid, the current running of the
inverter will not affect its power consumption.
Relative parameters list:
Function
code
Name
P05.00
HDI input type selection
P05.01
S1 terminals function
P05.02
P05.03
Detailed instruction of parameters
0:HDI is high pulse input
1:HDI is switch input
0: No function
selection
1: Forward rotation operation
S2 terminals function
2: Reverse rotation operation
selection
3: 3-wire control operation
S3 terminals function
4: Forward rotation jogging
selection
5: Reverse rotation jogging
188
Default
value
0
1
4
7
Goodrive300 inverters
Function
code
P05.04
Basic operation instruction
Name
S4 terminals function
selection
P05.05
S5 terminals function
selection
P05.06
P05.07
P05.08
S6 terminals function
Detailed instruction of parameters
6: Coast to stop
Default
value
0
7: Fault reset
8: Operation pause
0
9: External fault input
10:Increasing frequency setting(UP)
selection
11:Decreasing
S7 terminals function
setting(DOWN)
0
frequency
selection
12:Cancel the frequency change setting
S8 terminals function
13:Shift between A setting and B setting
selection
14:Shift between combination setting
0
0
and A setting
15:Shift between combination setting
and B setting
16:Multi-stage speed terminal 1
17:Multi-stage speed terminal 2
18:Multi-stage speed terminal 3
19:Multi- stage speed terminal 4
20:Multi- stage speed pause
21:ACC/DEC time option1
22:ACC/DEC time option2
23:Simple PLC stop reset
24:Simple PLC pause
P05.09
HDI terminals function
selection
25:PID control pause
26:Traverse Pause(stop at the current
frequency)
27:Traverse reset(return to the center
frequency)
28:Counter reset
29:Torque control prohibition
30:ACC/DEC prohibition
31:Counter trigger
32:Length reset
33:Cancel the frequency change setting
temporally
34:DC brake
189
0
Goodrive300 inverters
Function
code
Basic operation instruction
Name
Detailed instruction of parameters
Default
value
35:Shift the motor 1 into moor 2
36:Shift the command to the keypad
37:Shift the command to the terminals
38:Shift
the
command
to
the
communication
39:Pre-magnetized command
40:Clear the power
41:Keep the power
42~63:Reserved
P05.10
P05.11
Polarity selection of the
input terminals
Switch filter time
0x000~0x1FF
0x000
0.000~1.000s
0.010s
0:Virtual terminals is invalid
1:MODBUS
communication
virtual
terminals are valid
2:PROFIBUS
P05.12
Virtual terminals setting
communication
virtual
terminals are valid
0
3: Ethernet communication virtual
terminals are valid
4: CAN communication virtual terminals
are valid
0:2-wire control 1
P05.13
Terminals control running
1:2-wire control 2
mode
2:3-wire control 1
0
3:3-wire control 2
P05.14
S1 terminal switching on
0.000~50.000s
delay time
P05.15
S1
0.000s
0.000~50.000s
terminal switching off
0.000s
delay time
P05.16
S2 terminal switching on
0.000~50.000s
delay time
P05.17
S2
0.000~50.000s
terminal switching off
190
0.000s
0.000s
Goodrive300 inverters
Function
code
Basic operation instruction
Name
Detailed instruction of parameters
Default
value
delay time
P05.18
S3 terminal switching on
0.000~50.000s
delay time
P05.19
S3
0.000s
0.000~50.000s
terminal switching off
0.000s
delay time
P05.20
S4 terminal switching on
0.000~50.000s
delay time
P05.21
S4
0.000s
0.000~50.000s
terminal switching off
0.000s
delay time
P05.22
S5
0.000~50.000s
terminal switching on
0.000s
delay time
P05.23
S5
0.000~50.000s
terminal switching off
0.000s
delay time
P05.24
S6
0.000~50.000s
terminal switching on
0.000s
delay time
P05.25
S6
0.000~50.000s
terminal switching off
0.000s
delay time
P05.26
S7
0.000~50.000s
terminal switching on
0.000s
delay time
P05.27
S7
0.000~50.000s
0.000s
terminal switching off
delay time
P05.28
S8
0.000~50.000s
terminal switching on
0.000s
delay time
P05.29
S8
0.000~50.000s
terminal switching off
191
0.000s
Goodrive300 inverters
Basic operation instruction
Function
Name
code
Detailed instruction of parameters
Default
value
delay time
P05.30
HDI
0.000~50.000s
terminal switching on
0.000s
delay time
P05.31
HDI
0.000~50.000s
terminal switching off
0.000s
delay time
P07.37
P17.12
Current fault bus voltage
0
Switch input terminals
0
state
7.12 Digital input
Goodrive300 series inverters have 2 relay output terminals and 1 Y output terminal and 1 high
speed pulse output terminal in the standard configuration. All functions of the digital input terminals
are programmable by the function codes. Open collector pole input can be selected into high
speed pulse input terminal or common switch input terminal by function code.
The below table is the option of the four function parameters and selecting the repeated output
terminal function is allowed.
Set value
Function
0
Invalid
1
Running
2
Forward running
3
Reverse running
4
Jogging
5
Inverter fault
6
FDT1
7
FDT2
8
Frequency arrival
Instructions
The output terminal has no function.
Output ON signal when the inverter is running and
there is frequency output.
Output ON signal when the inverter is running
forward and there is frequency output.
Output ON signal when the inverter is running
reverse and there is frequency output.
Output ON signal when the inverter is jogging and
there is frequency output.
Output ON signal when the inverter is in fault
Please refer to P08.32 and P08.33 for detailed
information.
Please refer to P08.34 and P08.35 for detailed
information.
Please refer to P08.36 for detailed information.
192
Goodrive300 inverters
Set value
Basic operation instruction
Function
Instructions
Output ON signal when the output frequency and
9
Zero-speed running
given frequency of the inverter is 0 at the same
time.
10
Upper-limit frequency arrival
11
Upper-limit frequency arrival
Output ON signal when the running frequency of the
inverter is the upper limit frequency.
Output ON signal when the running frequency of the
inverter is the lower limit frequency.
When the main circuit and the control circuit is
12
Ready
established and the protection function of the
inverter is not active. The inverter is in the running
state and it will output ON signal.
13
Pre-exciting
14
Overload pre-alarm
Output ON signal when the inverter is in the
pre-exciting state.
Output ON signal if the inverter is beyond the
pre-alarm point. Refer to P11.08~P11.10 for the
detailed instruction.
Output ON signal if the inverter is beyond the
15
Underload pre-alarm
pre-alarm point. Refer to P11.11~P11.12 for the
detailed instruction.
16
Simple PLC stage completion Output signal if the simple PLC stage is completed.
17
Simple PLC cycle completion
18
Set counting arrival
19
Fixed counting arrival
20
External fault valid
21
Length arrival
22
Running time arrival
Output signal if the 1 simple PLC cycle is
completed.
Output ON signal if the detected counting exceeds
the set value of P08.25.
Output ON signal if the detected counting exceeds
the set value of P08.26.
Output ON signal if external fault occurs.
Output ON signal if the actual detected length
exceeds the se length by P08.19.
Output ON signal if the accumulative running time
of the inverter exceeds the setting time by P08.27.
Output corresponding signal according to the
23
MODBUS communication
setting value of MODBUS. Output ON signal if the
virtual terminal output
setting value is 1 and output OFF signal if the
setting value is 0.
193
Goodrive300 inverters
Set value
Basic operation instruction
Function
Instructions
Output corresponding signal according to the
24
POROFIBUS communication
setting value of PROFIBUS. Output ON signal if the
virtual terminal output
setting value is 1 and output OFF signal if the
setting value is 0.
25~30
Reserved
Relative parameters list:
Function
code
Name
Detailed instruction of parameters
Default
value
0:Open collector pole high speed pulse
P06.00
HDO output type
output
0
1: Open collector pole output
P06.01
Y output selection
P06.02
HDO output selection
P06.03
Relay RO1 output
selection
0:Invalid
0
1:On operation
0
2:Forward rotation operation
1
3:Reverse rotation operation
4: Jogging operation
5:The inverter fault
6:FDT1
7:FDT2
8:Frequency arrival
9:Zero speed running
10:Upper limit frequency arrival
11:Lower limit frequency arrival
12:Ready for operation
P06.04
Relay RO2 output
selection
13:Pre-magnetizing
5
14:Ooverload pre-alarm
15: Uunderload pre-alarm
16:Ccompletion of simple PLC stage
17:Completion of simple PLC cycle
18:Setting count value arrival
19:Defined count value arrival
20:External fault valid
21:Length arrival
22:Running time arrival
23:MODBUS
194
communication
virtual
Goodrive300 inverters
Basic operation instruction
Function
Name
code
Detailed instruction of parameters
Default
value
terminals output
24:PROFIBUS
communication
virtual
terminals output
25~30:Reserved
P06.05
Polarity selection of output
terminals
0x00~0x0F
0x00
P06.06
Y switching on delay time 0.000~50.000s
0.000s
P06.07
Y switching off delay time 0.000~50.000s
0.000s
P06.08
P06.09
P06.10
P06.11
P06.12
P06.13
P07.38
P17.13
HDO switching on delay
time
HDO switching off delay
time
RO1 switching on delay
time
RO1 switching off delay
time
RO2 switching on delay
time
RO2 switching off delay
time
0.000~50.000s(valid
only
when
only
when
P06.00=1)
0.000~50.000s(valid
P06.00=1)
0.000s
0.000s
0.000~50.000s
0.000s
0.000~50.000s
0.000s
0.000~50.000s
0.000s
0.000~50.000s
0.000s
Output terminals state at
0
the current fault
Switch output terminals
0
state
7.13 Simple PLC
Simple PLC function is also a multi-stage speed generator. The inverter can change the running
frequency, direction to meet the need of processing according to the running time automatically. In
the past, this function needs to be assisted by external PLC, but now the inverter can realize this
function by itself.
The series inverters can control 16-stage speed with 4 groups of ACC/DEC time.
The multi-function digital output terminals or multi-function relay output an ON signal when the set
PLC finishes a circle (or a stage).
195
Goodrive300 inverters
Basic operation instruction
Digital output 15
Simple PLC stage completion
200ms
Digital output 20
Simple PLC cycle completion
200ms
Relative parameters list:
Function
code
Name
Detailed instruction of parameters
Default
value
0:Stop after running once
P10.00
Simple PLC means
1:Run at the final value after running
once
0
2:Cycle running
P10.01
P10.02
P10.03
P10.04
P10.05
P10.06
P10.07
P10.08
P10.09
P10.10
P10.11
P10.12
P10.13
P10.14
P10.15
P10.16
Simple PLC memory
selection
Multi-stage speed 0
The running time of stage
0
Multi-stage speed 1
0:Power loss without memory
1:Power loss memory
-100.0~100.0%
0.0~6553.5s(min)
-100.0~100.0%
The running time of stage 1 0.0~6553.5s(min)
Multi-stage speed 2
-100.0~100.0%
The running time of stage 2 0.0~6553.5s(min)
Multi-stage speed 3
-100.0~100.0%
The running time of stage 3 0.0~6553.5s(min)
Multi-stage speed 4
-100.0~100.0%
The running time of stage 4 0.0~6553.5s(min)
Multi-stage speed 5
-100.0~100.0%
The running time of stage 5 0.0~6553.5s(min)
Multi-stage speed 6
-100.0~100.0%
The running time of stage 6 0.0~6553.5s(min)
Multi-stage speed 7
-100.0~100.0%
196
0
0.0%
0.0s
0.0%
0.0s
0.0%
0.0s
0.0%
0.0s
0.0%
0.0s
0.0%
0.0s
0.0%
0.0s
0.0%
Goodrive300 inverters
Function
code
P10.17
P10.18
P10.19
P10.20
P10.21
P10.22
P10.23
P10.24
P10.25
P10.26
P10.27
P10.28
P10.29
P10.30
P10.31
P10.32
P10.33
P10.36
P10.34
P10.35
P05.01~P0
5.09
P06.01~P0
6.04
Basic operation instruction
Name
Detailed instruction of parameters
The running time of stage 7 0.0~6553.5s(min)
Multi-stage speed 8
-100.0~100.0%
0.0%
0.0s
-100.0~100.0%
0.0%
The running time of stage 9 0.0~6553.5s(min)
Multi-stage speed 10
The running time of stage
10
Multi-stage speed 11
The running time of stage
11
Multi-stage speed 12
The running time of stage
12
Multi-stage speed 13
The running time of stage
13
Multi-stage speed 14
The running time of stage
14
Multi-stage speed 15
The running time of stage
15
PLC restart manner
selection
Simple PLC 0~7 stage
ACC/DEC time selection
Simple PLC 8~15 stage
ACC/DEC time selection
Digital input function
selection
Digital outnput function
selection
value
0.0s
The running time of stage 8 0.0~6553.5s(min)
Multi-stage speed 9
Default
0.0s
-100.0~100.0%
0.0%
0.0s
0.0~6553.5s(min)
-100.0~100.0%
0.0%
0.0s
0.0~6553.5s(min)
-100.0~100.0%
0.0%
0.0s
0.0~6553.5s(min)
-100.0~100.0%
0.0%
0.0s
0.0~6553.5s(min)
-100.0~100.0%
0.0%
0.0s
0.0~6553.5s(min)
-100.0~100.0%
0.0%
0.0s
0.0~6553.5s(min)
0:Restart from the first stage
1:Continue
to
run
from
the
stop
0
frequency
0x0000~0XFFFF
0000
0x0000~0XFFFF
0000
23:Simple PLC stop reset
24:Simple PLC pause
15: Underload pre-alarm
16:Completion of simple PLC stage
197
Goodrive300 inverters
Function
code
P17.00
Basic operation instruction
Name
Set frequency
Detailed instruction of parameters
0.00Hz~P00.03
(the
frequency)
Max.
output
Default
value
0.00Hz
Simple PLC and the
P17.27
current stage of the
multi-stage speed
7.14 Multi-stage speed running
Set the parameters when the inverter carries out multi-stage speed running. Goodrive300 series
inverters can set 16 stage speed which can be selected by the combination code of multi-stage
speed terminals 1~4. They correspond to multi-stage speed 0 to 15.
198
Goodrive300 inverters
Basic operation instruction
Relative parameters list:
Function
code
P10.02
P10.03
Name
Multi-stage speed 0
Multi-stage speed 1
P10.05
The running time of stage 1
P10.06
Multi-stage speed 2
P10.07
The running time of stage 2
P10.08
Multi-stage speed 3
P10.09
The running time of stage 3
P10.10
Multi-stage speed 4
P10.11
The running time of stage 4
P10.12
Multi-stage speed 5
P10.13
The running time of stage 5
P10.14
Multi-stage speed 6
P10.15
The running time of stage 6
P10.16
Multi-stage speed 7
P10.17
The running time of stage 7
P10.18
Multi-stage speed 8
P10.19
The running time of stage 8
P10.20
Multi-stage speed 9
P10.21
The running time of stage 9
P10.23
P10.24
P10.25
P10.26
P10.27
P10.28
P10.29
P10.30
P10.31
P10.32
P10.33
-100.0~100.0%
The running time of stage 0 0.0~6553.5s(min)
P10.04
P10.22
Detailed instruction of parameters
Multi-stage speed 10
0.0s
-100.0~100.0%
0.0%
0.0~6553.5s(min)
0.0s
-100.0~100.0%
0.0%
0.0~6553.5s(min)
0.0s
-100.0~100.0%
0.0%
0.0~6553.5s(min)
0.0s
-100.0~100.0%
0.0%
0.0~6553.5s(min)
0.0s
-100.0~100.0%
0.0%
0.0~6553.5s(min)
0.0s
-100.0~100.0%
0.0%
0.0~6553.5s(min)
0.0s
-100.0~100.0%
0.0%
0.0~6553.5s(min)
0.0s
-100.0~100.0%
0.0%
0.0~6553.5s(min)
0.0s
-100.0~100.0%
0.0%
-100.0~100.0%
-100.0~100.0%
-100.0~100.0%
The running time of stage 13 0.0~6553.5s(min)
Multi-stage speed 14
-100.0~100.0%
The running time of stage 14 0.0~6553.5s(min)
Multi-stage speed 15
0.0s
0.0~6553.5s(min)
The running time of stage 12 0.0~6553.5s(min)
Multi-stage speed 13
0.0%
0.0%
The running time of stage 11 0.0~6553.5s(min)
Multi-stage speed 12
value
-100.0~100.0%
The running time of stage 10 0.0~6553.5s(min)
Multi-stage speed 11
Default
-100.0~100.0%
The running time of stage 15 0.0~6553.5s(min)
199
0.0s
0.0%
0.0s
0.0%
0.0s
0.0%
0.0s
0.0%
0.0s
0.0%
0.0s
Goodrive300 inverters
Function
Name
code
P10.34
P10.35
Basic operation instruction
Simple PLC 0~7 stage
ACC/DEC time selection
Simple PLC 8~15 stage
ACC/DEC time selection
Detailed instruction of parameters
Default
value
0x0000~0XFFFF
0000
0x0000~0XFFFF
0000
16:Multi-stage speed terminal 1
P05.01~
Digital input function
P05.09
selection
17:Multi-stage speed terminal 2
18:Multi-stage speed terminal 3
19:Multi- stage speed terminal 4
20:Multi- stage speed pause
Simple PLC and the current
P17.27
stage of the multi-stage
speed
7.15 PID control
PID control is commonly used to control the procedure through the controlled procedure. Adjust the
output frequency by proportional, integral, differential operation with the dispersion of the target
signals to stabilize the value on the target. It is possible to apply to the flow, pressure and
temperature control. Figure of basic control is as below:
Simple illustration of the PID control operation and adjustment:
200
Goodrive300 inverters
Basic operation instruction
Proportional adjustment (Kp): when there is an error between the feedback and the reference, a
proportional adjustment will be output. If the error is constant, the adjustment will be constant, too.
Proportional adjustment can respond to the feedback change quickly, but it can not realize non-fault
control. The gain will increase with the adjustment speed, but too much gain may cause vibration. The
adjustment method is: set a long integration time and derivation time to 0 first. Secondly make the
system run by proportional adjustment and change the reference. And then watch the error of the
feedback signal and the reference. If the static error is available (for example, increasing the
reference, the feedback will be less than the reference after a stable system), continue to increase the
gain, vice versa. Repeat the action until the static error achieves a little value.
Integration time (Ti): the output adjustment will accumulate if there is an error between the feedback
and the reference. The adjustment will keep on increasing until the error disappears. If the error is
existent all the time, the integration adjustor can cancel the static error effectively. Vibration may
occur as a result of unstable system caused by repeated over-adjustment if the integration adjustor is
too strong. The features of this kind of vibration are: the fluctuating feedback signal (around the
reference) and increasing traverse range will cause vibration. Adjust the integration time parameter
from a big value to a little one to change the integration time and monitor the result until a stable
system speed is available.
Derivation time (Td): when the error between the feedback and the reference, a proportional
adjustment will be output. The adjustment only depends on the direction and value of the error
change other than the error itself. The derivation adjustment controls the change of feedback signals
according to the changing trend when it fluctuates. Because the derivation may enlarge the
interference to the system, especially the frequent-changing interference, please use it carefully.
When P00.06, P00. 07=7 or P04.27=6, the running mode of the inverter is procedure PID control.
7.15.1 General steps of PID parameters setting:
a Ensure the gain P
When ensure the gain P, firstly cancel the PID integration and derivation (set Ti=0 and Td=0, see
the PID parameter setting for detailed information) to make proportional adjustment is the only
method to PID. Set the input as 60%~70% of the permitted Max. Value and increase gain P from 0
until the system vibration occurs, vice versa, and record the PID value and set it to 60%~70% of
the current value. Then the gain P commission is finished.
b Ensure the integration time
After ensuring the gain P, set an original value of a bigger integration time and decrease it until the
system vibration occurs, vice versa, until the system vibration disappear. Record the Ti and set the
integration time to 150%~180% of the current value. Then integration time commission is finished.
c Ensure the derivation time
Generally, it is not necessary to set Td which is 0.
If it needs to be set, set it to 30% of the value without vibration via the same method with P and Ti.
201
Goodrive300 inverters
Basic operation instruction
d Commission the system with and without load and then adjust the PID parameter until it is
available.
7.15.2 PID inching
After setting the PID control parameters, inching is possible by following means:
Control the overshoot
Shorten the derivation time and prolong the integration time when overshoot occurs.
Achieve the stable state as soon as possible
Shorten the integration time (Ti) and prolong the derivation time (Td) even the overshoot occurs,
but the control should be stable as soon as possible.
Control long vibration
If the vibration periods are longer than the set value of integration time (Ti), it is necessary to
prolong the integration time (Ti) to control the vibration for the strong integration.
Control short vibration
Short vibration period and the same set value with the derivation time (Td) mean that the derivation
time is strong. Shortening the derivation time (Td) can control the vibration. When setting the
derivation time as 0.00(ire no derivation control) is useless to control the vibration, decrease the
gain.
202
Goodrive300 inverters
Basic operation instruction
Relative parameters list:
Function
code
Name
Detailed instruction of parameters
Default
value
0:Keypad digital given(P09.01)
1:Analog channel AI1 given
2:Analog channel AI2 given
3:Analog channel AI3 set
P09.00
PID given source
selection
4:Hhigh speed pulse HDI set
5:Multi-stage speed set
0
6:MODBUS communication set
7:PROFIBUS communication set
8:Ethernet communication set
9:CAN communication set
P09.01
Keypad pre-setting PID
given
-100.0%~100.0%
0.0%
0:Analog channel AI1 feedback
1:Analog channel AI2 feedback
2:Analog channel AI3 feedback
P09.02
PID feedback source
Selection
3:High speed HDI feedback
4:MODBUS communication feedback
0
5:PROFIBUS communication feedback
6:Ethernet communication feedback
7:CAN communication feedback
P09.03
P09.04
PID output feature
0:PID output is positive
selection
1:PID output is negative
0
Proportional gain (Kp)
0.00~100.00
1.00
P09.05
Interval time(Ti)
0.00~10.00s
0.10s
P09.06
Differential time(Td)
0.00~10.00s
0.00s
P09.07
Sampling cycle(T)
0.00~100.00s
0.10s
P09.08
PID control deviation limit
0.0~100.0%
P09.09
Output upper limit of PID
P09.10~100.0% (Max. Frequency or the
203
0.0%
100.0%
Goodrive300 inverters
Function
code
Basic operation instruction
Name
Detailed instruction of parameters
Default
value
Max. Voltage)
P09.10
P09.11
P09.12
Output lower limit of PID
-100.0%~P09.09 (Max. Frequency or the
Max. Voltage)
Feedback offline detection 0.0~100.0%
value
Feedback offline detection 0.0~3600.0s
time
0.0%
0.0%
1.0s
0x00~0x11
LED ones:
0:Keep the integral adjustment ON while
the frequency achieves upper or lower
limit.
P09.13
PID adjustment selection
1:Stop the integral adjustment while the
0x00
frequency achieves the upper or lower
limit
LED tens:
0:The same with the setting direction
1:Opposite to the setting direction
P17.00
Set frequency
0.00Hz~P00.03 (the Max. frequency)
0.00Hz
P17.23
PID given value
-100.0~100.0%
0.0%
P17.24
PID response value
-100.0~100.0%
0.0%
7.16 Traverse running
Traverse is applied in some industries such as textile, chemical fiber and cases where traverse and
convolution is required. The working flowchart is as below:
204
Goodrive300 inverters
Basic operation instruction
Function code
P00.03
Name
Max.
output
frequency
Detailed instruction of parameters
P00.03~400.00Hz
Default
value
50.00Hz
0:Keypad data setting
1:Analog AI1 setting
2:Analog AI2 setting
3:Analog AI3 setting
4:High-speed pulse HDI setting
A frequency
P00.06
5:Simple PLC program setting
command
6: Multi-stage speed running setting
selection
7: PID control setting
8:MODBUS communication setting
9:PROFIBUS communication setting
10:Ethernet communication
setting(reserved)
11:CAN communication setting(reserved)
205
0
Goodrive300 inverters
Basic operation instruction
Function code
Name
P00.11
ACC time 1
Detailed instruction of parameters
Default
value
Depend
0.0~3600.0s
on
model
Depend
P00.12
DEC time 1
0.0~3600.0s
on
model
Digital input
P05.01~P05.09
function
selection
P08.15
Traverse range
26:Traverse Pause(stop at the current
frequency)
27:Traverse reset(return to the center
frequency)
0.0~100.0%(relative to the set frequency)
0.0%
0.0~50.0%(relative to the traverse range)
0.0%
0.1~3600.0s
5.0s
0.1~3600.0s
5.0s
Sudden jumping
P08.16
frequency
range
P08.17
P08.18
Traverse boost
time
Traverse
declining time
7.17 Pulse counter
Goodrive300 series inverters support pulse counter which can input counting pulse through HDI
terminal. When the actual length is longer than or equal to the set length, the digital output terminal
can output length arrival pulse signal and the corresponding length will clear automatically.
206
Goodrive300 inverters
Function
code
P05.00
Basic operation instruction
Name
HDI input type selection
HDI high-speed pulse
P05.40
input function
selection
P05.01~
P05.09
P06.01~
P06.04
Digital input function
selection
Digital output function
selection
Detailed instruction of parameters
0:HDI is high pulse input
1:HDI is switch input
Default
value
0
0:Frequency setting input
1:Counter input
0
2:Length counting input
28:Counter reset
31:Counter trigger
17:Completion of simple PLC cycle
18:Setting count value arrival
P08.25
Setting counting value
P08.26~65535
0
P08.26
Given counting value
0~P08.25
0
P17.18
Counting value
0~65535
0
207
Goodrive300 inverters
Basic operation instruction
7.18 Fixed-length control
Goodrive300 series inverters support fixed-length control function which can input length counting
pulse through HDI, and then count the actual length according to the internal counting formula. If
the actual length is longer than or equal to the set length, the digital output terminal can output the
length arrival pulse signal of 200ms and the corresponding length will clear automatically.
Note: the length arrival belongs to pulse output and the lasting time is 200ms.
Function
code
P05.00
Name
HDI input type selection
HDI high-speed pulse
P05.40
input function
selection
P05.01~
P05.09
P06.01~
P06.04
Digital input function
selection
Digital output function
Detailed instruction of parameters
0:HDI is high pulse input
1:HDI is switch input
Default
value
0
0:Frequency setting input
1:Counter input
2:Length counting input
32: Length reset
20: Length arrival
selection
208
0
Goodrive300 inverters
Basic operation instruction
Function
Name
code
P08.19
Detailed instruction of parameters
Default
value
Set length
0~65535m
0
P08.20
Actual length
0~65535m
0
P08.21
Pulse number per
1~10000
1
revolution
P08.22
Axis perimeter
0.01~100.00cm
10.00cm
P08.23
Length times
0.001~10.000
1.000
P08.24
Length correcting
0.001~1.000
1.000
coefficient
P17.17
Length
0~65535
0
7.19 Fault procedure
Goodrive300 series inverters provide sufficient fault procedure information for the convenience of
user’s application.
Relative parameters list:
Function
code
Name
Detailed instruction of parameters
Default
value
0:No fault
P07.27
Current fault type
1:IGBT U phase protection(OUt1)
2:IGBT V phase protection(OUt2)
209
0
Goodrive300 inverters
Function
code
Basic operation instruction
Name
Detailed instruction of parameters
3:IGBT W phase protection(OUt3)
4:OC1
5:OC2
6:OC3
7:OV1
8:OV2
9:OV3
10:UV
11:Motor overload(OL1)
12:The inverter overload(OL2)
13:Input side phase loss(SPI)
14:Output side phase loss(SPO)
15:Overheating
of
the
rectifier
module(OH1)
16:Overheating fault
of the inverter
module(OH2)
17:External fault(EF)
18:485 communication fault(CE)
19:Current detection fault(ItE)
20:Motor antotune fault(tE)
21:EEPROM operation fault(EEP)
22:PID response offline fault(PIDE)
23:Braking unit fault(bCE)
24:Running time arrival(END)
25:Electrical overload(OL3)
26:Panel communication fault(PCE)
27:Parameter uploading fault (UPE)
28:Parameter downloading fault(DNE)
29:Profibus communication fault(E-DP)
30:Ethernet communication fault(E-NET)
31:CAN communication fault(E-CAN)
32:Grounding short circuit fault 1(ETH1)
33:Grounding short circuit fault 2(ETH2)
34:Speed deviation fault(dEu)
35:Maladjustment(STo)
210
Default
value
Goodrive300 inverters
Function
code
Basic operation instruction
Name
P07.28
Previous fault type
P07.29
Previous 2 fault type
P07.30
Previous 3 fault type
P07.31
Previous 4 fault type
P07.32
P07.33
P07.34
P07.35
P07.36
P07.37
P07.38
P07.39
P07.40
P07.41
P07.42
P07.43
P07.44
P07.45
P07.46
P07.47
Detailed instruction of parameters
Default
value
Previous 5 fault type
Current fault running
0.00Hz
frequency
Ramp given frequency at
0.00Hz
current fault
Output voltage at the
0V
current fault
Current fault output
0.0A
current
Current fault bus voltage
0.0V
The Max. temperature at
0.0℃
Current fault
Input terminals state at the
0
current fault
Output terminals state at
0
the current fault
Previous fault running
0.00Hz
frequency
Ramp reference
0.00Hz
frequency at previous fault
Output voltage at the
0V
previous fault
Output current at the
0.0A
previous fault
Bus voltage at the
0.0V
previous fault
The Max. temperature at
0.0℃
the previous fault
Input terminals state at the
0
previous fault
211
Goodrive300 inverters
Function
code
P07.48
P07.49
P07.50
P07.51
P07.52
P07.53
P07.54
P07.55
P07.56
Basic operation instruction
Name
Detailed instruction of parameters
Output terminals state at
Default
value
0
the previous fault
Previous 2 fault running
0.00Hz
frequency
Ramp given frequency at
0.00Hz
the previous 2 fault
Output voltage at the
0V
previous 2 fault
Output current at the
0.0A
previous 2 fault
Bus voltage at the
0.0V
previous 2 fault
The Max. temperature at
0.0℃
previous 2 fault
Input terminals state at
0
previous 2 fault
Output terminals state at
0
previous 2 fault
212
Goodrive300 inverters
Fault tracking
Fault tracking
8
8.1 What this chapter contains
This chapter tells how to reset faults and view fault history. It also lists all alarm and fault
messages including the possible cause and corrective actions.
Only qualified electricians are allowed to maintain the inverter. Read the
safety instructions in chapter Safety precautions before working on the
inverter.
8.2 Alarm and fault indications
Fault is indicated by LEDs. See Operation Procedure. When TRIP light is on, an alarm or
fault message on the panel display indicates abnormal inverter state. Using the information
given in this chapter, most alarm and fault cause can be identified and corrected. If not,
contact with the INVT office.
8.3 How to reset
The inverter can be reset by pressing the keypad key STOP/RST, through digital input, or by
switching the power light. When the fault has been removed, the motor can be restarted.
8.4 Fault history
Function codes P07.25~P07.30 store 6 recent faults. Function codes P07.31~P07.38,
P07.39~P7.46, P07.47~P07.54 show drive operation data at the time the latest 3 faults
occurred.
8.5 Fault instruction and solution
Do as the following after the inverter fault:
1. Check to ensure there is nothing wrong with the kepad. If not, please contact with the local
INVT office.
2. If there is nothing wrong, please check P07 and ensure the corresponding recorded fault
parameters to confirm the real state when the current fault occurs by all parameters.
3. See the following table for detailed solution and check the corresponding abnormal state.
4. Eliminate the fault and ask for relative help.
5. Check to eliminate the fault and carry out fault reset to run the inverter.
213
Goodrive300 inverters
Fault code
OUt1
Fault type
Possible cause
Inverter module
1. The acceleration is too
U phase
protection
OUt2
Fault tracking
1. Increase Acc time.
fast.
2. There is damage to the 2. Change the power unit.
Inverter module V
internal
phase protection
phase.
of the 3. Check the driving wires.
to IGBT
4. Check if there is strong
of the interference to the external
3.The connection
OUt3
Inverter module W
phase protection
OC1
OC2
What to do
equipment.
driving wires is not good,
4.The grounding is not good
Accelerating
1.
The
acceleration
or 1. Increase the ACC time
2. Check the input power
Overcurrent
deceleration is too fast.
Decelerating
2. The voltage of the grid is 3. Select the inverter with a
overcurrent
too low.
larger power
The power of the inverter is Check if the load is short
too low.
circuited
(the
grounding
The load transients or is short circuited or the wire
abnormal.
OC3
Constant
overcurrent
The
short
grounding
is
circuited)
circuited or the output is Check
phase loss.
or
the
short rotation is not smooth.
the
output
configuration.
There is strong external Check if there is strong
interference.
OV1
OV2
interference.
Accelerating
1. Check the input power
overvoltage
2. Check if the DEC time of
Decelerating
1. The input
overvoltage
abnormal.
voltage is the load is to short or the
inverter starts during the
2. There is large energy rotation of the motor or it
OV3
Constant
feedback.
needs to increase the
energy consumption
overvoltage
components.
UV
Undervoltage fault The voltage of the power Check the input power of
of the Bus
supply is too low.
214
the supply line
Goodrive300 inverters
Fault tracking
1. The voltage of the power 1. Check the power of the
supply is too low.
Overload of the
OL1
motor
supply line
2. The motor setting rated 2. Reset the rated current of
current is incorrect.
the motor
3. The motor stall or load 3. Check the load and adjust
transients is too strong.
the torque lift
1. The acceleration is too
fast
1. Increase the ACC time
2. Reset the rotating motor
2. Avoid the restarting after
3. The voltage of the power stopping.
OL2
Overload of the
inverter
supply is too low.
3. Check the power of the
4. The load is too heavy.
supply line
5. Close loop vector control, 4. Select an inverter with
reverse direction of the code bigger power.
panel and long low-speed 5. Select a proper motor.
operation
The
OL3
inverter
will
Electrical overload overload
report
pre-alarm
according to the set value.
SPI
SPO
Phase loss of the
input side
Phase loss of the
supply side
Phase loss or fluctuation of
input R,S,T
serious asymmetrical three
2.
Check
installation
1.
Check
the
output
distribution
cable
or fan 1. Refer to the overcurrent
Rectifying module damage
overheated
1. Check input power
2. Check the motor and
phase of the load)
OH1
overload pre-alarm point.
distribution
U,V,W phase loss input(or
1. Air duct jam
Check the load and the
solution
2. Ambient temperature is
2. Redistribute
too high.
dredge the wind channel or
215
Goodrive300 inverters
OH2
Fault tracking
Inverting module
overheated
EF
Outside fault
SI
external
fault
input Check the external device
terminals action
input
1. The baud rate setting is
incorrect.
2.
485
CE
communication
fault
Fault
occurs
to
the
The
communication
address is wrong.
4.
There
interference
is
strong
to
2. Check the communication
connection distribution
3.
communication wiring.
3.
1. Set proper baud rate
the
communication.
Set
proper
communication address.
4. Chang or replace the
connection
distribution
improve
or
the
anti-interference capability.
1. The connection of the
Current-detecting
ItE
fault
control board is not good
1. Check the connector and
2. Assistant power is bad
repatch
3. Hoare components is 2. Change the Hoare
broken
3. Change the main control
4. The modifying circuit is panel
abnormal.
1. The motor capacity does
not comply with the inverter
capability
2. The rated parameter of
Motor-autotuning
tE
fault
the motor does not set
correctly.
3. The offset between the
parameters from autotune
and the standard parameter
1. Change the inverter mode
2. Set the ratedparameter
according
to
the
motor
name plate
3. Empty the motor load and
reindentify
4.
Check
connection
the
and
motor
set
the
parameter.
5. Check if the upper limit
is huge
4. Autotune overtime
216
frequency is above 2/3 of
the rated frequency.
Goodrive300 inverters
Fault tracking
1. Error of controlling the
EEP
EEPROM
operation fault
write
and
read
of
the
parameters
2. Damage to EEPROM
PIDE
PID feedback
outline fault
1. PID feedback offline
2.
PID
feedback
source
disappear
1. Press STOP/RST to reset
2. Change the main control
panel
1. Check the PID feedback
signal
2. Check the PID feedback
source
1. Braking circuit fault or
damage to the braking pipes
bCE
Braking unit fault
2.
The
external
braking
resistor is not sufficient
1. Check the braking unit
and , change new braking
pipe
2.
Increase
the
braking
resistor
1. The output of the inverter 1. Check if the connection of
Grounding
ETH1
shortcut fault 1
is short circuited with the the motor is normal or not
ground.
2. Change the Hoare
2. There is fault in the 3. Change the main control
current detection circuit.
panel
1. The output of the inverter 1. Check if the connection of
Grounding
ETH2
shortcut fault 2
is short circuited with the the motor is normal or not
ground.
2. Change the Hoare
2. There is fault in the 3. Change the main control
current detection circuit.
panel
1.
Check the load
and
ensure it is normal. Increase
Velocity deviation
dEu
fault
The load is too heavy or the detection time.
stalled.
2.
Check
control
normal.
217
whether
the
parameters
are
Goodrive300 inverters
Fault tracking
1. The control parameters of
the synchronous motors not
STo
Maladjustment
fault
set properly.
2. The autoturn parameter is
The
Check the load
and
ensure it is normal.
2.
Check
control
whether
parameter is
the
set
properly or not.
not right.
3.
1.
inverter
is
not
connected to the motor.
3.
Increase
maladjustment
the
detection
time.
END
Running time
arrival
The actual running time of Ask for the supplier and
the inverter is above the adjust the setting running
internal setting running time. time.
1. The connection of the
keypad wires is not good or
broken.
PCE
Keypad
2. The keypad wire is too
communication
long and affected by strong
fault
interference.
3. There is circuit fault on
the communication of the
1. Check the keypad wires
and ensure whether there is
mistake.
2. Check the environment
and avoid the interference
source.
3. Change the hardware and
ask for service.
keypad and main board.
1. The connection of the 1. Check the keypad wires
keypad wires is not good or and ensure whether there is
broken.
DNE
Parameters
downloading fault
mistake.
2. The keypad wire is too 2. Change the hardware and
long and affected by strong ask for service.
interference.
3. Repack-up the data in the
3. There is mistake on the keypad.
data storage of the keypad.
LL
Electronic
underload fault
The inverter will report the
underload
pre-alarm
according to the set value.
218
Check the load and the
underload pre-alarm point.
Goodrive300 inverters
Fault tracking
1. Communication address
Profibus
E-DP
communication
fault
is not correct.
2. Corresponding resistor is
not dialed
Check related setting
3. The files of main stop
GSD does not set sound
4. The Ethernet address is
Ethernet
E-NET
communication
fault
not set right.
1. Check the relative setting.
5. The Ethernet
Check the communication
communication is not
method selection.
selected to right.
2. Check the environment
6. The ambient interference
and avoid the interference.
is too strong.
1. The connection is not
CAN
E-CAN
communication
fault
sound
1. Check the connection
2. Corresponding resistor is 2. Draw out the correspond
resistor
not dialed
3. The communication is 3. Set the same baud rate
uneven
8.6 Common fault analysis
8.6.1 The motor does not work
219
Goodrive300 inverters
Fault tracking
8.6.2 Motor vibration
220
Goodrive300 inverters
Fault tracking
8.6.3 Overvoltage
8.6.4 Undervoltage fault
221
Goodrive300 inverters
Fault tracking
8.6.5 Abnormal heating of the motor
Check if there is
abnormal heat to the
motor
Check if the parameter is No
right or not
Set right
motor
parameters
Yes
Check if it needs to carry
out parameter autotune
No
Parameter
autotune
Yes
Check if the inverter runs at low
speed all the time
Yes
Check if it is frequency- No
invertering motor
Select right
motor
Yes
Check if the load is too Yes
heavy
Low the load
No
Check if the 3-phase
motor is balance
No
Change the
motor
Yes
Set proper
carrier
frequency
Yes
Add output
filter
Yes
Check if the carrier
frequency is too low
No
Check if the motor wire
is too long
No
If the it is the inverter
fault, please contact with
our company
222
Goodrive300 inverters
Fault tracking
8.6.6 Overheat of the inverter
8.6.7 Speed loss during the acceleration of the motor
Speed loss occurs to the
inverter during ACC
Check if the ACC time
is too short
Y
e
s
Increase the ACC time
N
o
Check if the voltage between the
terminals is among the range
N
o
Check if the load and
inertia is too big
Y
e
s
Y
e
s
N
o
Reduce the torque of the
load and increase the
capacity of the inverter
Y
e
s
Check if the load
torque is too big
Y
e
s
Check if it is V/F
control
Thicken the motor cables and shorten
the configuration distance and adjust the
voltage of the reactor
Check if the motor is
special
N
o
Reduce the inertia of the
load and increase the
capacity of the inverter
N
o
If the it is the inverter
fault or interference,
please contact with our
company
N
o
Check if the torque
boost is too high
Y
e
s
Modify the torque boost
N
o
Check if it performs
parameter autotune
Y
e
s
If the it is the inverter
fault or interference,
please contact with our
company
223
N
o
Overcurrent
Y
e
s
Contact with our
company
Goodrive300 inverters
Fault tracking
8.6.8 Overcurrent
Overcurrent
Check if UVW is short circuited to
Y
the earth
e
Remove the motor cable and
s
ensure if there is connected with the
earth.
Settle the short circuit
problem and configure
the motor cables rightly
N
o
Check if the motor is
short circuited to the
earth
N
o
Check if the motor type and
parameters are right
Y
e
s
Check if it needs
parameters autotune
Y
e
s
Check if the ACC/DEC
time is too short
Y
e
s
N
o
Change the motor
Set right motor type and
parameters
N
o
Parameters autotune
Y
e
s
Adjust the ACC/DEC
time
N
o
Check if the load is too
heavy
Y
e
s
Reduce the load and
increase the capacity of
the inverter
N
o
Check if there is
interference source
Decrease the torque
boost
Y
e
s
Check if the torque
boost is too big
Adjust the V/F curve
Check if the multi-dots
V/F curve is set rightly
N
o
Set right
V/F vibration control
parameters
Y
e
s
Check if there is
abnormal vibration to
the motor
N
o
Clear the interference
source
N
o
Y
e
s
Check if it is V/F
control
N
o
Y
e
s
Y
e
s
N
o
Check if the parameter of current
loop and speed loop are right
Y
e
s
If the it is the inverter
fault, please contact with
our company
If the it is the inverter
fault, please contact with
our company
224
N
o
Set right parameters of
current loop and speed
loop
Goodrive300 inverters
Maintenance and hardware diagnostics
Maintenance and hardware diagnostics
9
9.1 What this chapter contains.
The chapter contains preventive maintenance instructions of the inverter.
9.2 Maintenance intervals
If installed in an appropriate environment, the inverter requires very little maintenance. The
table lists the routine maintenance intervals recommended by INVT.
Checking part
Checking
Checking item
Check
the
ambient
temperature,
humidity
and vibration and ensure
there is no dust, gas, oil
Ambient environment
fog and water drop.
Ensure there are no tools
or
other
foreign
or
dangerous objects
Visual
examination
Conforming
and instrument
the manual
and control circuit are
normal.
test
There
clear enough
tools
examination
dangerous
millimeter
examination
characters Visual
are displayed totally
Main
circuit
For public use
Ensure the screws are
tightened securility
Ensure
distortion,
damage
there
is
or
color-changing caused by
The
characters
are
displayed
normally.
Conforming
the manual
Tighten up
NA
no Visual
to
the manual
examination
crackles, examination
225
no
or
Measurement by Conforming
Keypad
the
are
Visual
Ensure the display is Visual
Ensure
to
objects.
Ensure the main circuit
Voltage
Criterion
method
NA
to
Goodrive300 inverters
Maintenance and hardware diagnostics
Checking part
Checking
Checking item
Criterion
method
overheating and aging to
the
machine
and
insulator.
NA
Note: if the color
of
copper
blocks change, it
Ensure there is no dust Visual
and dirtiness
the
does not mean
examination
that
there
is
something
wrong with the
features.
Ensure that there is no
distortion
or
color-changing
The lead of the
conductors
conductors
of
caused
the
by
NA
Visual
examination
overheating.
NA
Ensure that there are no
crackles
or Visual
color-changing
of
the examination
protective layers.
Terminals seat
NA
Ensure that there is no Visual
damage
examination
NA
Ensure that there is no
Filter capacitors
weeping, color-changing, Visual
crackles
and
cassis examination
expansion.
NA
Ensure the safety valve is Estimate
in the right place.
usage
the
time
according to the
226
maintenance
or
Goodrive300 inverters
Checking part
Maintenance and hardware diagnostics
Checking
Checking item
Criterion
method
measure
the
static capacity.
The
If necessary, measure the
static capacity.
Measure
capacity
static
the capacity
is
by above or equal
instruments.
to
the
original
value *0.85.
Ensure whether there is Smelling
and
NA
replacement and splitting visual
caused by overheating.
examination
Visual
examination
Resistors
Ensure that there is no
offline.
remove
or
one The resistors are
ending
to in ±10% of the
coagulate
or standard value.
measure
with
multimeters
Transformers and
reactors
Ensure
there
is
no
abnormal vibration, noise
Hearing,
smelling
examination
NA
Ensure whether there is
contactors and
relays
noise in
the Hearing
workrooms.
Ensure the contactor is Visual
good enough.
Control
circuit
PCB and plugs
NA
visual
and smelling,
Electromagnetism vibration
and
NA
examination
Ensure there is no loose
NA
Fasten up
screws and contactors.
Ensure
there
smelling
is
no Smelling
and visual
color-changing.
227
examination
and NA
Goodrive300 inverters
Maintenance and hardware diagnostics
Checking part
Checking
Checking item
Criterion
method
Ensure
there
crackles,
are
no
damage
NA
Visual
examination
distortion and rust.
NA
Visual
examination
Ensure
there
is
no estimate
weeping and distortion to usage
the capacitors.
or
the
time
according to the
maintenance
information
Estimate whether there is
abnormal
noise
and
vibration.
Estimate
Hearing
examination
or
there
is
no
losses screw.
NA
Tighten up
NA
Visual
examination
Cooling
Ensure
Stable rotation
rotate with hand
Cooling fan
system
and
Visual
there
is
no estimate
color-changing caused by usage
overheating.
or
the
time
according to the
maintenance
information
Ensure whether there is
Ventilating
duct
NA
stuff or foreign objection Visual
in the cooling fan, air examination
vent.
Consult the local INVT Service representative for more details on the maintenance. Visit the
official website of INVT: http://www.invt.com.cn and select Inverter Services – Maintenance
and Field Services.
228
Goodrive300 inverters
Maintenance and hardware diagnostics
9.3 Cooling fan
The inverter’s cooling fan has a minimum life span of 25,000 operating hours. The actual life
span depends on the inverter usage and ambient temperature.
The operating hours can be found through P07.15 (accumulative hours of the inverter).
Fan failure can be predicted by the increasing noise from the fan bearings. If the inverter is
operated in a critical part of a process, fan replacement is recommended once these
symptoms appear. Replacement fans are available from INVT.
Replacing the cooling fan
Read and follow the instructions in chapter Safety Precautions.
Ignoring the instructions would cause physical injury or death, or
damage to the equipment.
1. Stop the inverter and disconnect it from the AC power source and wait for at least the time
designated on the inverter.
2. Lever the fan holder off the drive frame with a screwdriver and lift the hinged fan holder
slightly upward from its front edge.
3. Free the fan cable from the clip.
4. Disconnect the fan cable.
5. Remove the fan holder from the hinges.
6. Install the new fan holder including the fan in reverse order.
7. Restore power.
9.4 Capacitors
9.4.1 Reforming the capacitors
The DC bus capacitors must be reformed according to the operation instruction if the
inverter has been stored for a long time. The storing time is counted form the producing date
other than the delivery data which has been marked in the serial number of the inverter.
Time
Storing time less than 1
Operational principle
Operation without charging
year
Storing time 1-2 years
Connect with the power for 1 hour before first ON command
Use power surge to charge for the inverter
Storing time 2-3 years
• Add 25% rated voltage for 30 minutes
• Add 50% rated voltage for 30 minutes
229
Goodrive300 inverters
Maintenance and hardware diagnostics
Time
Operational principle
• Add 75% rated voltage for 30 minutes
• Add 100% rated voltage for 30 minutes
Use power surge to charge for the inverter
Storing time more than 3
years
• Add 25% rated voltage for 2 hours
• Add 50% rated voltage for 2 hours
• Add 75% rated voltage for 2 hours
• Add 100% rated voltage for 2 hours
The method of using power surge to charge for the inverter:
The right selection of Power surge depends on the supply power of the inverter. Single
phase 230V AC/2A power surge applied to the inverter with single/three-phase 230V AC as
its input voltage. The inverter with single/three-phase 230V AC as its input voltage can apply
Single phase 230V AC/2A power surge. All DC bus capacitors charge at the same time
because there is one rectifier.
High-voltage inverter needs enough voltage (for example, 400V) during charging. The small
capacitor power (2A is enough) can be used because the capacitor nearly does not need
current when charging.
The operation method of inverter charging through resistors (LEDs):
The charging time is at least 60 minutes if charge the DC bus capacitor directly through
supply power. This operation is available on normal temperature and no-load condition and
the resistor should be serially connected in the 3-phase circuits of the power supply:
400V driven device: 1k/100W resistor. LED of 100W can be used when the power voltage is
no more than 400V. But if used, the light may be off or weak during charging.
400V charging illustration of the driven device
230
Goodrive300 inverters
Maintenance and hardware diagnostics
9.4.2 Change electrolytic capacitors
Read and follow the instructions in chapter Safety Precautions.
Ignoring the instructions may cause physical injury or death, or
damage to the equipment.
Change electrolytic capacitors if the working hours of electrolytic capacitors in the inverter
are above 35000. Please contact with the local INVT offices or diall our national service
hotline (400-700-9997) for detailed operation.
9.5 Power cable
Read and follow the instructions in chapter Safety Precautions.
Ignoring the instructions may cause physical injury or death, or
damage to the equipment.
1. Stop the drive and disconnect it from the power line. Wait for at least the time designated
on the inverter.
2. Check the tightness of the power cable connections.
3. Restore power.
231
Goodrive300 inverters
Communication protocol
Communication protocol
10
10.1 What this chapter contains
This chapter describes the communication protocol of Goodrive300 series inverters.
The Goodrive300 series inverters provide RS485 communication interface. It adopts
international
standard
ModBus
communication
protocol
to
perform
master-slave
communication. The user can realize centralized control through PC/PLC, upper control PC,
etc. (set the control command, running frequency of the inverter, modify relevant function
codes, monitor and control the operating state and fault information of the inverter and so on)
to adapt specific application requirements.
10.2 Brief instruction to Modbus protocol
Modbus protocol is a software protocol and common language which is applied in the
electrical controller. With this protocol, the controller can communicate with other devices via
network (the channel of signal transmission or the physical layer, such as RS485). And with
this industrial standard, the controlling devices of different manufacturers can be connected
to an industrial network for the convenient of being monitored.
There are two transmission modes for Modbus protocol: ASCII mode and RTU (Remote
Terminal Units) mode. On one Modbus network, all devices should select same transmission
mode and their basic parameters, such as baud rate, digital bit, check bit, and stopping bit
should have no difference.
Modbus network is a controlling network with single-master and multiple slaves, which
means that there is only one device performs as the master and the others are the slaves on
one Modbus network. The master means the device which has active talking right to sent
message to Modbus network for the controlling and inquiring to other devices. The slave
means the passive device which sends data message to the Modbus network only after
receiving the controlling or inquiring message (command) form the master (response). After
the master sends message, there is a period of time left for the controlled or inquired slaves
to response, which ensure there is only one slave sends message to the master at a time for
the avoidance of singles impact.
Generally, the user can set PC, PLC, IPC and HMI as the masters to realize central control.
Setting certain device as the master is a promise other than setting by a bottom or a switch
or the device has a special message format. For example, when the upper monitor is
232
Goodrive300 inverters
Communication protocol
running, if the operator clicks sending command bottom, the upper monitor can send
command message actively even it can not receive the message form other devices. In this
case, the upper monitor is the master. And if the designer makes the inverter send the data
only after receiving the command, then the inverter is the slave.
The master can communicate with any single slave or with all slaves. For the single-visiting
command, the slave should feedback a response message; for the broadcasting message
from the master, the slave does not need to feedback the response message.
10.3 Application of the inverter
The Modbus protocol of the inverter is RTU mode and the physical layer is 2-wire RS485.
10.3.1 2-wire RS485
The interface of 2-wire RS485 works on semiduplex and its data signal applies differential
transmission which is called balance transmission, too. It uses twisted pairs, one of which is
defined as A (+) and the other is defined as B (-). Generally, if the positive electrical level
between sending drive A and B is among +2~+6V, it is logic“1”,if the electrical level is among
-2V~-6V, it is logic“0”.
485+ on the terminal board corresponds to A and 485- to B.
Communication baud rate means the binary bit number in one second. The unit is bit/s (bps).
The higher the baud rate is, the quicker the transmission speed is and the weaker the
anti-interference is. If the twisted pairs of 0.56mm(24AWG)is applied as the communication
cables, the Max. Transmission distance is as below:
Baud rate
Max. transmission
Baud rate
distance
Max. transmission
distance
2400BPS
1800m
9600BPS
800m
4800BPS
1200m
19200BPS
600m
It is recommended to use shield cables and make the shield layer as the grounding wires
during RS485 remote communication.
In the cases with less devices and shorter distance, it is recommended to use 120Ω terminal
resistor as the performance will be weakened if the distance increase even though the
network can perform well without load resistor.
10.3.2.1 Single application
Figure 1 is the site Modbus connection figure of single inverter and PC. Generally, the
computer does not have RS485 interface, the RS232 or USB interface of the computer
should be converted into RS485 by converter. Connect the A terminal of RS485 to the 485+
233
Goodrive300 inverters
Communication protocol
terminal of the inverter and B to the 485- terminal. It is recommended to use the shield
twisted pairs. When applying RS232-RS485 converter, if the RS232 interface of the
computer is connected to the RS232 interface of the converter, the wire length should be as
short as possible within the length of 15m. It is recommended to connect the RS232-RS485
converter to the computer directly. If using USB-RS485 converter, the wire should be as
short as possible, too.
Select a right interface to the upper monitor of the computer (select the interface of
RS232-RS485 converter, such as COM1) after the wiring and set the basic parameters such
as communication baud rate and digital check bit to the same as the inverter.
Figure 1 RS485 physical connection in single application
10.3.1.2 Multi-applicationIn the real multi-application, the chrysanthemum connection and
star connection are commonly used.
Chrysanthemum chain connection is required in the RS485 industrial fieldbus standards.
The two ends are connected to terminal resistors of 120Ω which is shown as figure 2. Figure
3 is the simply connection figure and figure 4 is the real application figure.
Fugure 2 Chrysanthemum connection
234
Goodrive300 inverters
Communication protocol
Figure 3 Chrysanthemum connection
Figure 4 Chrysanthemum connection applications
Figure 5 is the star connection. Terminal resistor should be connected to the two devices
which have the longest distance. (1# and 15#device)
Figure 5 star connection
It is recommended to use shield cables in multiple connection. The basic parameter of the
devices, such as baud rate and digital check bit in RS485 should be the same and there
should be no repeated address.
10.3.2 RTU mode
10.3.2.1 RTU communication frame format
If the controller is set to communicate by RTU mode in Modbus network every 8bit byte in
the message includes two 4Bit hex characters. Compared with ACSII mode, this mode can
235
Goodrive300 inverters
Communication protocol
send more data at the same baud rate.
Code system
· 1
start bit
· 7 or 8 digital bit, the minimum valid bit can be sent firstly. Every 8 bit frame includes two
hex characters (0...9, A...F)
· 1
even/odd check bit . If there is no checkout, the even/odd check bit is inexistent.
· 1
end bit (with checkout), 2 Bit(no checkout)
Error detection field
· CRC
The data format is illustrated as below:
11-bit character frame (BIT1~BIT8 are the digital bits)
Start bit
BIT1
BIT2
BIT3
BIT4
BIT5
BIT6
BIT7
BIT8
Check
bit
End bit
10-bit character frame (BIT1~BIT7 are the digital bits)
Start bit
BIT1
BIT2
BIT3
BIT4
BIT5
BIT6
BIT7
Check
bit
End bit
In one character frame, the digital bit takes effect. The start bit, check bit and end bit is used
to send the digital bit right to the other device. The digital bit, even/odd checkout and end bit
should be set as the same in real application.
The Modbus minimum idle time between frames should be no less than 3.5 bytes. The
network device is detecting, even during the interval time, the network bus. When the first
field (the address field) is received, the corresponding device decodes next transmitting
character. When the interval time is at least 3.5 byte, the message ends.
The whole message frame in RTU mode is a continuous transmitting flow. If there is an
interval time (more than 1.5 bytes) before the completion of the frame, the receiving device
will renew the uncompleted message and suppose the next byte as the address field of the
new message. As such, if the new message follows the previous one within the interval time
of 3.5 bytes, the receiving device will deal with it as the same with the previous message. If
these two phenomena all happen during the transmission, the CRC will generate a fault
message to respond to the sending devices.
The standard structure of RTU frame:
START
ADDR
T1-T2-T3-T4(transmission time of 3.5 bytes)
Communication address: 0~247(decimal system)(0 is the broadcast
address)
236
Goodrive300 inverters
CMD
Communication protocol
03H:read slave parameters
06H:write slave parameters
DATA (N-1)
The data of 2*N bytes are the main content of the communication as
…
well as the core of data exchanging
DATA (0)
CRC CHK low bit
Detection value:CRC (16BIT)
CRC CHK high bit
END
T1-T2-T3-T4(transmission time of 3.5 bytes)
10.3.2.1 RTU communication frame error checkout
Various factors (such as electromagnetic interference) may cause error in the data
transmission. For example, if the sending message is a logic “1”,A-B potential difference on
RS485 should be 6V, but in reality, it may be -6V because of electromagnetic interference,
and then the other devices take the sent message as logic“0”. If there is no error checkout,
the receiving devices will not find the message is wrong and they may give incorrect
response which cause serious result. So the checkout is essential to the message.
The theme of checkout is that: the sender calculate the sending data according to a fixed
formula, and then send the result with the message. When the receiver gets this message,
they will calculate anther result according to the same method and compare it with the
sending one. If two results are the same, the message is correct. If not, the message is
incorrect.
The error checkout of the frame can be divided into two parts: the bit checkout of the byte
and the whole data checkout of the frame (CRC check).
Bit checkout of the byte
The user can select different bit checkouts or non-checkout, which impacts the check bit
setting of each byte.
The definition of even checkout: add an even check bit before the data transmission to
illustrate the number of “1” in the data transmission is odd number or even number. When it is
even, the check byte is “0”, otherwise, the check byte is”1”. This method is used to stabilize
the parity of the data.
The definition of odd checkout: add an odd check bit before the data transmission to illustrate
the number of “1” in the data transmission is odd number or even number. When it is odd, the
check byte is “0”, otherwise, the check byte is”1”. This method is used to stabilize the parity
of the data.
For example, when transmitting “11001110”, there are five “1” in the data. If the even
237
Goodrive300 inverters
Communication protocol
checkout is applied, the even check bit is “1”; if the odd checkout is applied; the odd check bit
is “0”. The even and odd check bit is calculated on the check bit position of the frame. And
the receiving devices also carry out even and odd checkout. If the parity of the receiving data
is different from the setting value, there is an error in the communication.
CRC check
The checkout uses RTU frame format. The frame includes the frame error detection field
which is based on the CRC calculation method. The CRC field is two bytes, including 16
figure binary values. It is added into the frame after calculated by transmitting device. The
receiving device recalculates the CRC of the received frame and compares them with the
value in the received CRC field. If the two CRC values are different, there is an error in the
communication.
During CRC, 0*FFFF will be stored. And then, deal with the continuous 6-above bytes in the
frame and the value in the register. Only the 8Bit data in every character is effective to CRC,
while the start bit, the end and the odd and even check bit is ineffective.
The calculation of CRC applies the international standard CRC checkout principles. When
the user is editing CRC calculation, he can refer to the relative standard CRC calculation to
write the required CRC calculation program.
Here provided a simple function of CRC calculation for the reference (programmed with C
language):
unsigned int crc_cal_value(unsigned char *data_value,unsigned char data_length)
{
int i;
unsigned int crc_value=0xffff;
while(data_length--)
{
crc_value^=*data_value++;
for(i=0;i<8;i++)
{
if(crc_value&0x0001)crc_value=(crc_value>>1)^0xa001;
else crc_value=crc_value>>1;
}
}
return(crc_value);
}
In ladder logic, CKSM calculated the CRC value according to the frame with the table inquiry.
238
Goodrive300 inverters
Communication protocol
The method is advanced with easy program and quick calculation speed. But the ROM
space the program occupied is huge. So use it with caution according to the program
required space.
10.4 RTU command code and communication data illustration
10.4.1 command code:03H
03H(correspond to binary 0000 0011),read N words(Word)(the Max. continuous
reading is 16 words)
Command code 03H means that if the master read data form the inverter, the reading
number depends on the “data number” in the command code. The Max. continuous reading
number is 16 and the parameter address should be continuous. The byte length of every
data is 2 (one word). The following command format is illustrated by hex (a number with “H”
means hex) and one hex occupies one byte.
The command code is used to read the working stage of the inverter.
For example, read continuous 2 data content from0004H from the inverter with the address
of 01H (read the content of data address of 0004H and 0005H), the frame structure is as
below:
RTU master command message (from the master to the inverter)
START
T1-T2-T3-T4 (transmission time of 3.5 bytes)
ADDR
01H
CMD
03H
High bit of the start bit
00H
Low bit of the start bit
04H
High bit of data number
00H
Low bit of data number
02H
CRC low bit
85H
CRC high bit
CAH
END
T1-T2-T3-T4 (transmission time of 3.5 bytes)
T1-T2-T3-T4 between START and END is to provide at least the time of 3.5 bytes as the
leisure time and distinguish two messages for the avoidance of taking two messages as one
message.
ADDR = 01H means the command message is sent to the inverter with the address of 01H
and ADDR occupies one byte
CMD=03H means the command message is sent to read data form the inverter and CMD
239
Goodrive300 inverters
Communication protocol
occupies one byte
“Start address” means reading data form the address and it occupies 2 bytes with the fact
that the high bit is in the front and the low bit is in the behind.
“Data number” means the reading data number with the unit of word. If the “start address’ is
0004H and the “data number” is 0002H, the data of 0004H and 0005H will be read.
CRC occupies 2 bytes with the fact that the high bit is in the front and the low bit is in the
behind.
RTU slave response message (from the inverter to the master)
START
T1-T2-T3-T4 (transmission time of 3.5 bytes)
ADDR
01H
CMD
03H
Byte number
04H
Data high bit of address 0004H
13H
Data low bit of address 0004H
88H
Data high bit of address 0005H
00H
Data low bit of address 0005H
00H
CRC CHK low bit
7EH
CRC CHK high bit
9DH
END
T1-T2-T3-T4 (transmission time of 3.5 bytes)
The meaning of the response is that:
ADDR = 01H means the command message is sent to the inverter with the address of 01H
and ADDR occupies one byte
CMD=03H means the message is receiced from the inverter to the master for the response
of reading command and CMD occupies one byte
“Byte number” means all byte number from the byte (excluding the byte) to CRC
byte(excluding the byte). 04 means there are 4 byte of data from the “byte number” to “CRC
CHK low bit”, which are “digital address 0004H high bit”, “digital address 0004H low bit”,
“digital address 0005H high bit” and “digital address 0005H low bit”.
There are 2 bytes stored in one data with the fact that the high bit is in the front and the low
bit is in the behind of the message, the data of data address 0004H is 1388H,and the data of
data address 0005H is 0000H.
CRC occupies 2 bytes with the fact that the high bit is in the front and the low bit is in the
behind.
240
Goodrive300 inverters
Communication protocol
10.4.2 Command code:06H
06H(correspond to binary 0000 0110), write one word(Word)
The command means that the master write data to the inverter and one command can write
one data other than multiple dates. The effect is to change the working mode of the inverter.
For example, write 5000 (1388H) to 0004H from the inverter with the address of 02H, the
frame structure is as below:
RTU master command message (from the master to the inverter)
START
T1-T2-T3-T4 (transmission time of 3.5
bytes)
ADDR
02H
CMD
06H
High bit of writing data address
00H
Low bit of writing data address
04H
data content
13H
data content
88H
CRC CHK low bit
C5H
CRC CHK high bit
6EH
END
T1-T2-T3-T4 (transmission time of 3.5
bytes)
RTU slave response message (from the inverter to the master)
START
T1-T2-T3-T4 (transmission time of 3.5
bytes)
ADDR
02H
CMD
06H
High bit of writing data address
00H
Low bit of writing data address
04H
High bit of data content
13H
Low bit of data content
88H
CRC CHK low bit
C5H
CRC CHK high bit
6EH
END
T1-T2-T3-T4 (transmission time of 3.5
bytes)
Note: section 10.2 and 10.3 mainly describe the command format, and the detailed
241
Goodrive300 inverters
Communication protocol
application will be mentioned in 10.8 with examples.
10.4.3 Command code 08H for diagnosis
Meaning of sub-function codes
Sub-function Code
Description
0000
Return to inquire information data
For example: The inquiry information string is same as the response information string when
the loop detection to address 01H of driver is carried out.
The RTU request command is:
START
T1-T2-T3-T4 (transmission time of 3.5 bytes)
ADDR
01H
CMD
08H
High byte of sub-function code
00H
Low byte of sub-function code
00H
High byte of data content
12H
Low byte of data content
ABH
Low byte of CRC
ADH
High byte of CRC
END
14H
T1-T2-T3-T4 (transmission time of 3.5 bytes)
The RTU response command is:
START
T1-T2-T3-T4 (transmission time of 3.5 bytes)
ADDR
01H
CMD
08H
High byte of sub-function code
00H
Low byte of sub-function code
00H
High byte of data content
12H
Low byte of data content
ABH
Low byte of CRC
ADH
High byte of CRC
14H
END
T1-T2-T3-T4 (transmission time of 3.5 bytes)
10.4.4 The definition of data address
The address definition of the communication data in this part is to control the running of the
inverter and get the state information and relative function parameters of the inverter.
242
Goodrive300 inverters
Communication protocol
10.4.4.1 The rules of parameter address of the function codes
The parameter address occupies 2 bytes with the fact that the high bit is in the front and the
low bit is in the behind. The range of high and low byte are: high byte—00~ffH; low byte—
00~ffH. The high byte is the group number before the radix point of the function code and the
low byte is the number after the radix point. But both the high byte and the low byte should
be changed into hex. For example P05.05, the group number before the radix point of the
function code is 05, then the high bit of the parameter is 05, the number after the radix point
05, then the low bit of the parameter is 05, then t he function code address is 0505H and the
parameter address of P10.01 is 0A01H.
Note: P29 group is the factory parameter which can not be read or changed. Some
parameters can not be changed when the inverter is in the running state and some
parameters can not be changed in any state. The setting range, unit and relative instructions
should be paid attention to when modifying the function code parameters.
Besides, EEPROM is stocked frequently, which may shorten the usage time of EEPROM.
For users, some functions are not necessary to be stocked on the communication mode.
The needs can be met on by changing the value in RAM. Changing the high bit of the
function code form 0 to 1 can also realize the function. For example, the function code
P00.07 is not stocked into EEPROM. Only by changing the value in RAM can set the
address to 8007H. This address can only be used in writing RAM other than reading. If it is
used to read, it is an invalid address.
10.4.1.2 The address instruction of other function in Modbus
The master can operate on the parameters of the inverter as well as control the inverter,
such as running or stopping and monitoring the working state of the inverter.
Below is the parameter list of other functions
243
Goodrive300 inverters
Function
instruction
Address
definition
Communication protocol
Data meaning instruction
R/W
characteristics
0001H:forward running
0002H:reverse running
0003H:forward jogging
Communication
control command
0004H:reverse jogging
2000H
0005H:stop
W
0006H:coast to stop (emergency stop)
0007H:fault reset
0008H:jogging stop
0009H:pre-exciting
The address of
the
communication n
setting value
2001H
Communication setting
frequency(0~Fmax(unit: 0.01Hz))
2002H
PID given, range(0~1000, 1000 corresponds
to100.0% )
2003H
PID feedback, range(0~1000, 1000
corresponds to100.0% )
W
2004H
Torque setting value (-3000~3000, 1000
corresponds to the 100.0% of the rated current
of the motor)
W
2005H
The upper limit frequency setting during
forward rotation(0~Fmax(unit: 0.01Hz))
W
2006H
The upper limit frequency setting during
reverse rotation(0~Fmax(unit: 0.01Hz))
W
2007H
The upper limit torque of electromotion torque
(0~3000, 1000 corresponds to the 100.0% of
the rated current of the motor)
W
2008H
The upper limit torque of braking torque
(0~3000, 1000 corresponds to the 100.0% of
the rated current of the motor)
W
2009H
Special control command word
Bit0~1:=00:motor 1
=01:motor 2
=10:motor 3
=11:motor 4
Bit2:=1 torque control =0:speed control
W
200AH
Virtual input terminal command , range:
0x000~0x1FF
W
200BH
Virtual input terminal command , range:
0x00~0x0F
W
200CH
Voltage setting value(special for V/F
separation)
(0~1000, 1000 corresponds to the 100.0% of
the rated voltage of the motor)
W
244
W
Goodrive300 inverters
Function
instruction
Communication protocol
Address
definition
Data meaning instruction
R/W
characteristics
200DH
AO output setting 1(-1000~1000, 1000
corresponds to 100.0%)
W
200EH
AO output setting 2(-1000~1000, 1000
corresponds to 100.0%)
W
0001H:forward running
SW 1 of the
inverter
0002H:forward running
2100H
R
0003H:stop
0004H:fault
0005H: POFF state
SW 2 of the
inverter
2101H
Bit0: =0:ready for operation =1:not ready for
operation
Bi1~2:=00:motor 1
=01:motor 2
=10:motor 3
=11:motor 4
Bit3: =0:asynchronous motor
=1:synchronous motor
Bit4:=0:pre-alarm without overload
=1:overload pre-alarm
Bit5~ Bit6: =00: keypad control =01: terminal
contorl
=10: communication control
Fault code of the
inverter
2102H
See the fault type instruction
R
Identifying code
of the inverter
2103H
Goodrive300-----0x0110
R
Operation
frequency
3000H
0~Fmax (unit: 0.01Hz)
R
Setting freqency
3001H
0~Fmax (unit: 0.01Hz)
R
Bus voltage
3002H
0.0~2000.0V (unit: 0.1V)
R
Output voltage
3003H
0~1200V (unit: 1V)
R
Output current
3004H
0.0~3000.0A (unit: 0.1A)
R
Rotation speed
3005H
0~65535 (unit: 1RPM)
R
Output power
3006H
-300.0~300.0% (unit: 0.1%)
R
Output torque
3007H
-250.0~250.0% (unit: 0.1%)
R
Close loop
setting
3008H
-100.0~100.0% (unit: 0.1%)
R
Close loop
feedback
3009H
-100.0~100.0% (unit: 0.1%)
R
R
Input IO state
300AH
00~0F
R
Output IO state
300BH
00~0F
R
Analog input 1
300CH
0.00~10.00V (unit: 0.01V)
245
R
Goodrive300 inverters
Communication protocol
Function
instruction
Address
definition
R/W
characteristics
Analog input 2
300DH
0.00~10.00V (unit: 0.01V)
R
Analog input 3
300EH
0.00~10.00V (unit: 0.01V)
R
Analog input 4
300FH
Read input of
high-speed pulse
1
3010H
Read input of
high-speed pulse
2
3011H
Read the current
stage of
multi-stage
speed
3012H
0~15
R
External length
3013H
0~65535
R
External
counting
3014H
0~65535
R
-300.0~300.0% (unit: 0.1%)
R
Data meaning instruction
R
0.00~50.00kHz (unit: 0.01Hz)
R
R
Torque setting
3015H
Identifying code
of the inverter
3016H
R
Fault code
5000H
R
R/W characteristics means the function is with read and write characteristics. For example,
“communication control command” is writing chrematistics and control the inverter with
writing command (06H). R characteristic can only read other than write and W characteristic
can only write other than read.
Note: when operate on the inverter with the table above, it is necessary to enable some
parameters. For example, the operation of running and stopping, it is necessary to set
P00.01 to communication running command channel and set P00.02 to MODBUS
communication channel. And when operate on “PID given”, it is necessary to set P09.00 to
“MODBUS communication setting”.
The encoding rules for device codes (corresponds to identifying code 2103H of the inverter)
Code high
8bit
01
Meaning
GD
Code low 8
Meaning
position
0x08
GD35 vector inverter
0x09
GD35-H1 vector inverter
0x0a
GD300 vector inverter
0x0b
GD100 simple vector inverter
0x0c
GD200 universal inverter
246
Goodrive300 inverters
Code high
8bit
Meaning
Communication protocol
Code low 8
Meaning
position
0x0d
GD10 mini inverter
0x0e
GD800 PWM rectifier
0x0f
GD800 PWM inverter
Note: the code is consisted of 16 bit which is high 8 bits and low 8 bits. High 8 bits mean the
motor type series and low 8 bits mean the derived motor types of the series. For example,
0110H means Goodrive300 vector inverters.
10.4.5 Fieldbus ratio values
The communication data is expressed by hex in actual application and there is no radix point
in hex. For example, 50.12Hz can not be expressed by hex so 50.12 can be magnified by
100 times into 5012, so hex 1394H can be used to express 50.12.
A non-integer can be timed by a multiple to get an integer and the integer can be called
fieldbus ratio values.
The fieldbus ratio values are refered to the radix point of the setting range or default value in
the function parameter list. If there are figures behind the radix point (n=1), then the fieldbus
n
ratio value m is
. Take the table as the example:
10
If there is one figure behind the radix point in the setting range or the default value, then the
fieldbus ratio value is 10. if the data received by the upper monitor is 50, then the
“hibernation restore delay time” is 5.0 (5.0=50÷10).
If Modbus communication is used to control the hibernation restore delay time as 5.0s.
Firstly, 5.0 can be magnified by 10 times to integer 50 (32H) and then this data can be sent.
After the inverter receives the command, it will change 50 into 5 according to the fieldbus
ratio value and then set the hibernation restore delay time as 5s.
Another example, after the upper monitor sends the command of reading the parameter of
247
Goodrive300 inverters
Communication protocol
hibernation restore delay time ,if the response message of the inverter is as following:
Because the parameter data is 0032H (50) and 50 divided by 10 is 5, then the hibernation
restore delay time is 5s.
10.4.6 Fault message response
There may be fault in the communication control. For example, some parameter can only be
read. If a writing message is sent, the inverter will return a fault response message.
The fault message is from the inverter to the master, its code and meaning is as below:
Code
Name
Meaning
The command from master can not be executed. The reason
Illegal
01H
command
maybe:
1. This command is only for new version and this version can not
realize.
2. Slave is in fault state and can not execute it.
02H
Illegal data
address.
Some of the operation addresses are invalid or not allowed to
access. Especially the combination of the register and the
transmitting bytes are invalid.
When there are invalid data in the message framed received by
slave.
03H
Illegal value
Note: This error code does not indicate the data value to write
exceed the range, but indicate the message frame is an illegal
frame.
04H
Operation
failed
05H
Password
error
06H
Data frame
error
The parameter setting in parameter writing is invalid. For example,
the function input terminal can not be set repeatedly.
The password written to the password check address is not same
as the password set by P7.00.
In the frame message sent by the upper monitor, the length of the
digital frame is incorrect or the counting of CRC check bit in RTU is
different from the lower monitor.
07H
Written not
allowed.
It only happen in write command, the reason maybe:
1. The written data exceeds the parameter range.
248
Goodrive300 inverters
Communication protocol
2. The parameter should not be modified now.
3. The terminal has already been used.
The parameter
can not be
08H
changed
The modified parameter in the writing of the upper monitor can not
be modified during running.
during running
Password
09H
protection
When the upper monitor is writing or reading and the user
password is set without password unlocking, it will report that the
system is locked.
The slave uses functional code fields and fault addresses to indicate it is a normal response
or some error occurs (named as objection response). For normal responses, the slave
shows corresponding function codes, digital address or sub-function codes as the response.
For objection responses, the slave returns a code which equals the normal code, but the first
byte is logic 1.
For example: when the master sends a message to the slave, requiring it to read a group of
address data of the inverter function codes, there will be following function codes:
0 0 0 0 0 0 1 1 (Hex 03H)
For normal responses, the slave responds the same codes, while for objection responses, it
will return:
1 0 0 0 0 0 1 1 (Hex 83H)
Besides the function codes modification for the objection fault, the slave will respond a byte
of abnormal code which defines the error reason.
When the master receives the response for the objection, in a typical processing, it will send
the message again or modify the corresponding order.
For example, set the “running command channel” of the inverter (P00.01, parameter
address is 0001H) with the address of 01H to 03, the command is as following:
But the setting range of “running command channel” is 0~2, if it is set to 3, because the
number is beyond the range, the inverter will return fault response message as below:
249
Goodrive300 inverters
Communication protocol
Abnormal response code 86H means the abnormal response to writing command 06H; the
fault code is 04H. In the table above, its name is operation failed and its meaning is that the
parameter setting in parameter writing is invalid. For example, the function input terminal can
not be set repeatedly.
10.4.7 Example of writing and reading
Refer to 10.4.1 and 10.4.2 for the command format.
10.4.7.1 Example of reading command 03H
Read the state word 1 of the inverter with the address of 01H (refer to table 1). From the
table 1, the parameter address of the state word 1 of the inverter is 2100H.
The command sent to the inverter:
If the response message is as below:
The data content is 0003H. From the table 1, the inverter stops.
Watch “the current fault type” to “the previous 5 times fault type” of the inverter through
commands, the corresponding function code is P07.27~P07.32 and corresponding
parameter address is 071BH~0720H(there are 6 from 071BH).
The command sent to the inverter:
If the response message is as below:
250
Goodrive300 inverters
Communication protocol
See from the returned data, all fault types are 0023H (decimal 35) with the meaning of
maladjustment (STo).
10.4.7.2 Example of writing command 06H
Make the inverter with the address of 03H to run forward. See table 1, the address of
“communication control command” is 2000H and forward running is 0001. See the table
below.
The command sent by the master:
If the operation is success, the response may be as below (the same with the command sent
by the master):
Set the Max. Output frequency of the inverter with the address of 03H as100Hz.
See the figures behind the radix point, the fieldbus ratio value of the Max. output frequency
(P00.03) is 100. 100Hz timed by 100 is 10000 and the corresponding hex is 2710H.
The command sent by the master:
251
Goodrive300 inverters
Communication protocol
If the operation is successful, the response may be as below (the same with the command
sent by the master):
Note: the blank in the above command is for illustration. The blank can not be added in the
actual application unless the upper monitor can remove the blank by themselves.
Common communication fault
Common communication faults are: no response to the communication or the inverter
returns abnormal fault.
The possible reason for no response to the communication:
Selecting wrong serial interface, for example, if the converter is COM1, selecting COM2
during the communication
The baud rate, digital bit, end bit and check bit are not the same with the inverter + and - of
RS485 are connected in reverse.
The 485 wire cap on the terminal board of the inverter is not plug in. the wire cap in behind
the terminal arrangement.
252
Goodrive300 inverters
Appendix A
Extension card
Appendix A
A.1 What this chapter contains
This chapter describes the extension cards used in Goodrive300 series inverters.
A.2 Profibus extension card
(1) Profibus is an open international fieldbus standard that allows data exchange among
various types of automation components. It is widely used in manufacturing automation,
process automation and in other automation areas such as buildings, transportation, power,
providing an effective solution for the realization of comprehensive automation and
site-equipment intellectualization.
(2) Profibus is composed of three compatible components, Profibus-DP (Decentralized
Periphery, distributed peripherals), Profibus-PA (Process Automation), Profibus-FMS
(Fieldbus Message Specification). It is periodically exchange data with the inverter when
using master-slave way. PRNV Profibus-DP Adapter module only supports Profibus-DP
protocol.
(3) The physical transmission medium of bus is twisted-pair (in line with RS-485 standard),
two-wire cable or fiber optic cable. Baud rate is from 9.6Kbit/s to 12Mbit/s. The maximum
bus cable length is between 100 m and 1200 m, specific length depending on the selected
transmission rate (see chapter Technical Data). Up to 31 nodes can be connected to the
same Profibus network when repeaters aren’t used. But, if use repeaters, up to 127 nodes
can be connected to the same Profibus network segment (including repeaters and master
stations).
(4) In the process of Profibus communication, tokens are assigned among main stations and
master-slave transmission among master-slave stations. Supporting single-master or
multi-master system, stations-programmable logic controller (PLC)-choose nodes to
respond to the host instruction. Cycle master-from user data transmission and non-cyclic
master-master station can also send commands to multiple nodes in the form of broadcast.
In this case, the nodes do not need to send feedback signals to the host. In the Profibus
network, communication between nodes can not be allowed.
(5) Profibus protocol is described in detail in EN 50170 standard. To obtain more information
about Profibus, please refer to the above-mentioned EN 50170 standards.
253
Goodrive300 inverters
Appendix A
254
Goodrive300 inverters
Appendix A
A.2.1 Product naming rules
Fieldbus adapter naming rules, the product model:
EC-TX 1 03
①
②
③
④
No.
Instruction
①
Product type
②
Card type
TX: communciation card
③
Technical
Odds such as 1,3,5,7 means the 1st, 2nd, 3rd, 4th technical version
④
Card
difference
Meaning
EC: extension card
03: PROFIBUS+Ethernet communication card
04: Ethernet+CAN communication card
A.2.2 EC-TX-103 communication card
EC-TX-103 communication card is an optional device to inverter which makes inverter
connected to Profibus network. In Profibus network, inverter is a subsidiary device. The
following functions can be completed using EC-TX-103 communication card:
● Send control commands to inverter (start, stop, fault reset, etc.).
● Send speed or given torque signal to inverter.
● Read state and actual values from inverter.
● Modify inverter parameter.
Please refer to the description of function codes in Group P15 for the commands supported
by the inverter. Below is the structure diagram of the connection between the INVT inverter
and Profibus:
A.2.3 The appearance of EC-TX-103 communication card
1
2
3
4
5
Outline diagram of EC-TX-103 communication card
1. Interface to the panel 2. Bus connector 3. Rotation node address selection switches 4.
255
Goodrive300 inverters
Appendix A
State display LEDs
External dimensions of EC-TX-103 communication card (Unit: mm)
A.2.4 Compatible motor of EC-TX-103 communication card
EC-TX-103 communication card is compatible with the following products:
● Goodrive300 series devices and all blasters supporting Profibus extension
● Host station supporting Profibus-DP protocol
A.2.5 Delivery list
The package of EC-TX-103 communication card contains:
● EC-TX-103 communication card
● Three copper columns (M3x10)
● User’s manual
Please contact with SHENZHEN INVT ELECTRIC CO., LTD or suppliers if there is
something missing. Notice will not be given for the reason of product upgrades.
A.2.6 Installation of EC-TX-103 communication card
A.2.6.1 Mechanical installation of EC-TX-103 communication card
1. Installation ambient
● Ambient temperature:0℃ ~ +40℃
● Relative humidity:5%~95%
● Other climate conditions: no drew, ice, rain, snow, hail air condition and the solar
radiation is below 700W/m 2,air pressure 70~106kPa
● Content of salt spray and corrosive gases :Pollution Level 2
● Dust and solid particles content: Pollution Level 2
● Vibration and shock: 5.9m/s2 (0.6g) on 9~ 200Hz sinusoidal vibration
256
Goodrive300 inverters
Appendix A
2. Installation steps:
● Fix the three copper columns on the location holes with screws.
● Insert the module into the defined location carefully and fix it on the copper column
with screw.
● Set the bus terminal switch of the module to the needed location.
3. Notes:
Disconnect the device from the power line before installation. Wait for at least three minutes
to let the capacitors discharge. Cut off dangerous voltage from external control circuit to the
unit output and input terminals.
Some electric components are sensitive to static charge. Do not touch the circuit board. If
you have to operate on it, please wear the grounding wrist belt.
A.2.6.2 Electrical installation of EC-TX-103 communication card
1. Node selection
Node address is the only address of Profibus on the bus. The address which is among
00~99 is shown with two figures and is selected by the spinning switch on the module. The
left switch shows the first number and the right one show the second number.
Node address = 10 x the first digital value + the second digital value x 1
2. Bus terminals
There is a bus terminal in each heading and ending to avoid error during operation. The DIP
switch on RPBA-01PCB is used to connect the bus terminals which can avoid the signal
feedback from the bus cables. If the module is the first or last one in the internet, the bus
terminal should be set as ON. Please disconnect EC-TX-103 communication card terminals
when the Profibus D-sub connector with internal terminals is in use.
A.2.6.3 Bus net connection of EC-TX-103 communication card
Bus communication interface
Transformation by double-shielded twisted pair copper cable is the most common way in
Profibus (conform to RS-485standard).
The basic characteristics of transformation technology:
257
Goodrive300 inverters
Appendix A
● Net topology:Linear bus, there are bus resistor in two ends.
● Transforming speed: 9.6k bit/s~12M bit/s
● Medium: double-shielded twisted pair cables,the shield can be removed according
to the environment (EMC).
● Station number: There are 32 stations in each segment (without relays) as to 127
stations (with relays)
● Contact pin: 9 frames D pin, the connector contact pins are as below:,
Contact pin of the connector
Instruction
1
-
Unused
2
-
Unused
3
B-Line
4
RTS
5
GND_BUS
6
+5V BUS
7
-
8
A-Line
9
-
Housing
SHLD
Positive data(twisted pair cables 1)
Sending requirement
Isolation ground
Isolated 5V DC power supply
Unused
Negative data(twisted pair cables 2)
Unused
Profibus shielded cable
+5V and GND_BUS are used in the fieldbus terminals. Some devices, such as light
transceiver (RS485) may get external power supply form these pins.
RTS is used in some devices to determine the sending direction. Only A-Line wires, B-Line
wires and shield are used in the normal application.
It is recommended to apply the standard DB9 connector of SIEMENS. If the communication
baud rate is above 187.5kbps, please follow the connection rules of SIEMENS seriously.
258
Goodrive300 inverters
Available
Appendix A
Not available (with interference to the keypad wiring)
Repeater
Up to 32 stations can be connected to each segment (master station or subsidiary stations),
the repeater have to be used when stations is more than 32. The repeaters in series are
generally no more than 3.
Note: There is no repeater station address.
A.2.6.4 Transmission rate and maximum distance
Maximum length of cable depends on the transmission rate. The Table below shows the
relationship between transmission rate and distance.
Transmission rate (kbps)
A-wire (m)
B-wire (m)
9.6
1200
1200
19.2
1200
1200
93.75
1200
1200
187.5
1000
600
500
400
200
1500
200
-----
259
Goodrive300 inverters
Appendix A
Transmission rate (kbps)
A-wire (m)
B-wire (m)
12000
100
-----
Transmission rate (kbps)
A-wire (m)
B-wire (m)
Impedance (Ω)
135~165
100~130
Capacitance per unit length(pF/m)
< 30
< 60
Loop Resistance (Ω/km)
110
--------
0.64
> 0.53
> 0.34
> 0.22
Transmission line parameters:
Core wire diameter (mm)
2
Line-core cross-section (mm )
Besides shielding twisted-pair copper wires, Profibus can also use optical fiber for
transmission in an electromagnetic interference environment to increase the high-speed
transmission distance there are two kinds of fiber optical conductors, one is low-cost plastic
fiber conductor, used distance is less than 50 meters, the other is glass fiber conductor, and
used distance is less than 1 kM.
A.2.6.5 Profibus bus connection diagram
Above is "terminal" wiring diagram. Cable is a standard Profibus cable consisting of a twisted
pair and shielding layer. The shielded layer of Profibus cable on all nodes is directly
grounded. Users can choose the best grounding method according to the situation.
Note:
Make sure that signal lines do not twist when connecting all stations. Shielded cable should
be used when system runs under high electromagnetic interface environment, which can
improve electromagnetic compatibility (EMC).
If using shielded braided wire and shielding foil, both ends should be connected to ground.
Using shielding area should be large enough to maintain a good conductivity. And data lines
must be separated from high-voltage.
Stub line segment should not be used when transmission rate more than 500K bit/s, The
260
Goodrive300 inverters
Appendix A
plug is available on the market which connects directly to data input and output cable. Bus
plug connection can be on or off at any time without interruption of data communications of
other station.
A.2.7 System configuration
1. Master station and inverter should be configured so that the master station can
communicate with the module after correctly installing EC-TX-103 communication card.
Each Profibus subsidiary station on the Profibus bus need to have "device description
document" named GSD file which used to describe the characteristics of Profibus-DP
devices. The software we provided for the user includes inverter related GSD files (device
data files) information, users can obtain type definition file (GSD) of master machines from
local INVT agent.
Configuration parameters of EC-TX-103 communication card:
Parameter number
Parameter name
Optional setting
Factory setting
0
Module type
Read only
Profibus-DP
1
Node address
0~99
2
0:9.6
1:19.2
kbit/s
2:45.45
3:93.75
4:187.5
2
Baud rate setting
5:500
6
6:1.5
7:3
Mbit/s
8:6
9:9
10:12
3
PZD3
0~65535
0
4
PZD4
Ibid
0
…
……
Ibid
0
10
PZD12
Ibid
0
2. Module type
This parameter shows communication module type detected by inverter; users can not
adjust this parameter. If this parameter is not defined, communication between the modules
261
Goodrive300 inverters
Appendix A
and inverter can not be established.
3. Node address
In Profibus network, each device corresponds to a unique node address, you can use the
node address selection switch to define node address (switch isn’t at 0) and the parameter is
only used to display the node address.
If node address selection switch is 0, this parameter can define node address. The user can
not adjust the parameter by themselves and the parameter is only used to display the node
address.
4. GSD file
In Profibus network, each Profibus subsidiary station needs GSD file "device description
document" which used to describe the characteristics of Profibus-DP devices. GSD file
contains all defined parameters, including baud rate, information length, amount of
input/output data, meaning of diagnostic data.
A CD-ROM will be offered in which contains GSD file (extension name is .gsd) for fieldbus
adapter. Users can copy GSD file to relevant subdirectory of configuration tools, please refer
to relevant system configuration software instructions to know specific operations and
Profibus system configuration.
A.2.8 Profibus-DP communication
1. Profibus-DP
Profibus-DP is a distributed I/O system, which enables master machine to use a large
number of peripheral modules and field devices. Data transmission shows cycle: master
machine read input information from subsidiary machine then give feedback signal.
EC-TX-103 communication card supports Profibus-DP protocol.
2. Service access point
Profibus-DP has access to Profibus data link layer (Layer 2) services through service access
point SAP. Every independent SAP has clearly defined function. Please refer to relevant
Profibus
user
manual
to know
more
about
service
access
point
information.
PROFIDRIVE-Variable speed drive adopts Profibus model or EN50170 standards (Profibus
protocol).
3. Profibus-DP information frame data structures
Profibus-DP bus mode allows rapid data exchange between master station and inverter.
Adopting master-slave mode dealing with inverter access, inverter is always subsidiary
station, and each has definite address. Profibus periodic transmission messages use 16
words (16 bit) transmission, the structure shown in figure1.
262
Goodrive300 inverters
Appendix A
Parameters area:
PKW1-Parameter identification
PKW2-array index number
PKW3-parameter value 1
PKW4-parameter value 2
Process data:
CW-Control word (from master to slave, see Table 1)
SW-state word (from slave to master, see Table 3)
PZD-process data (decided by users) (From master to slave output 【given value】, from
slave to master input【actual value】)
PZD area (process data area)
PZD area of communication message is designed for control and monitor inverter. PZD from
master and slave station is addressed in high priority; the priority of dealing with PZD is
superior to that of PKW, and always sends current valid date from interface.
Control word (CW) and state word (SW)
Control word (CW) is a basic method of fieldbus system controlling inverter. It is sent by the
fieldbus master station to inverter and the EC-TX-103 communication cards act as gateway.
Inverter responds according to the control word and gives feedbacks to master machine
through state word (SW).
Contents of control word and state word are shown in table 4.6 and table 4.7 respectively.
Please refer to inverter manual to know bit code.
Given value
Inverter can receive control information by several ways, these channels include: analog and
digital input terminals, inverter control board and module communication (such as RS485,
EC-TX-103 communication cards). In order to use Profibus control inverter, the
communication module must be set to be inverter controller.
Contents of set value are shown in Table 4.6.
Actual value
Actual value is a 16-bit word, which contains converter operation information. Monitoring
263
Goodrive300 inverters
Appendix A
capabilities are defined by inverter parameter. The integer scaling of actual value is sent to
master machine depending on selected function, please refer to inverter manual.
Contents of actual values are shown in Table 5.4.
Note: inverter always check the control word (CW) and bytes of given value.
Mission message (From master station to inverter)
Control word (CW)
The first word of PZD is control word (CW) of inverter; due to different control word (CW) of
PWM rectifier regenerative part and inverter part Illustration is depart in next two tables.
Control word (CW) of Goodrive300
Bit
0~7
8
9~10
11
14
Name
Value
State/Description
1
Forward running
2
Reverse running
3
Forward jogging
4
Reverse jogging
5
Decelerate to stop
6
Coast to stop (Emergency stop)
7
Fault reset
8
Jogging stop
9
Premagnetizing
1
Write enable (mainly is PKW1-PKW4 )
00
MOTOR GROUP 1 SELECTION
MOTOR GROUP
01
MOTOR GROUP 2 SELECTION
SELECTION
02
MOTOR GROUP 3 SELECTION
03
MOTOR GROUP 4 SELECTION
TORQUE CONTROL
1
Torque control enable
SELECTION
0
Torque control prohibition
COMMAND BYTE
WIRTE ENABLE
RESERVED
1
0
15
HEARTBEAT REF
1
Heartbeat enable
0
Heartbeat prohibition
Reference value (REF):
264
Goodrive300 inverters
Appendix A
From 2nd word to 12th of PZD task message is the main set value REF, main frequency set
value is offered by main setting signal source. As PWM rectifier feedback part doesn’t have
main frequency setting part, corresponding settings belong to reserved part, the following
table shows inverter part settings for Goodrive300.
Bit
PZD2
receiving
Name
2:Given
receiving
100.0%)
receiving
PZD5
receiving
PZD6
receiving
PZD7
receiving
PZD8
0
1:Set frequency(0~Fmax(unit:0.01Hz))
PZD3
PZD4
Function selection
0:Invalid
PID,
range(0~1000,1000
corresponds
to
0
3:PID feedback, range(0~1000,1000 corresponds to
0
100.0%)
4:Torque set value(-3000~3000,1000 corresponds to
0
100.0% the rated current of the motor)
5:Set
value
of
the
forward
rotation
upper-limit
0
frequency(0~Fmax unit:0.01Hz))
6:Set
value
of
the reversed
rotation
upper-limit
0
frequency(0~Fmax(unit:0.01Hz))
7:Electromotion
torque
upper
limit
(0~3000,1000
receiving
corresponds to 100.0%of the rated current of the motor)
PZD9
8:Braking torque upper limit (0~2000,1000 corresponds
receiving
PZD10
receiving
PZD11
receiving
0
0
to 100.0% of the rated current of the motor)
9:Virtual input terminals command
0
Range:0x000~0x1FF
10:Virtual output terminals command
0
Range:0x00~0x0F
11:Voltage
setting
value(specialized
for
V/F
separation )(0~1000,1000 corresponds to 100.0% the
rated voltage of the motor)
PZD12
receiving
12:AO output set value 1(-1000~1000,1000 corresponds
0
to 100.0%)
13:AO output set value 1(-1000~1000,1000 corresponds
to 100.0%)
State word (SW):
The first word of PZD response message is state word (SW) of inverter, the definition of state
265
Goodrive300 inverters
Appendix A
word is as follows:
State Word (SW) of Goodrive300 (SW)
Bit
Name
0~7
8
RUN STATE BYTE
DC VOLTAGE ESTABLISH
9~10
11
Value
Forward running
2
Reverse running
3
The inverter stops
4
The inverter is in fault
5
The inverter is in POFF state
1
Running ready
0
The running preparation is not ready
0
Motor 1 feedback
MOTOR GROUP
1
Motor 2 feedback
FEEDBACK
2
Motor 3 feedback
3
Motor 4 no feedback
1
Synchronous motor
0
Asynchronous motor
1
Overload pre-alarm
0
Non-overload pre-alarm
0
Keypad control
1
Terminal control
2
Communication control
3
Reserved
1
Heartbeat feedback
0
No heartbeat feedback
MOTOR TYPE FEEDBACK
12
State/Description
1
OVERLOAD ALARM
13
RUN/STOP MODE
14
15
HEARTBEAT FEEDBACK
Actual value (ACT):
From 2nd word to 12th of PZD task message is main set value ACT, main frequency set value
is offered by main setting signal source.
Actual value of Goodrive300
Bit
Name
Function selection
PZD2
0: Invalid
sending
1:Running frequency(*100, Hz)
PZD3
2: Set frequency(*100, Hz)
sending
3: Bus voltage(*10, V)
0
0
266
Goodrive300 inverters
Bit
Appendix A
Name
Function selection
PZD4
4: Output voltage(*1, V)
sending
5:Output current (*10, A)
PZD5
6:Output torque actual value(*10, %)
sending
7:Output power actual value (*10,
PZD6
%)
sending
8:Running rotating speed(*1, RPM)
PZD7
9:Running linear speed (*1, m/s)
sending
10:Ramp given frequency
PZD8
11:Fault code
sending
12:AI1 value (*100, V)
PZD9
13:AI2 value (*100, V)
sending
14:AI3 value (*100, V)
PZD10
15:PULSE frequency value (*100,
sending
kHz)
PZD11
16:Terminals input state
sending
17:Terminals output state
0
0
0
0
0
0
0
0
18:PID given (*100, %)
PZD12
sending
19:PID feedback (*100, %)
0
20:Motor rated torque
PKW area (parameter identification marks PKW1-value area). PKW area describes
treatment of parameter identification interface, PKW interface is a mechanism which
determine parameters transmission between two communication partners, such as reading
and writing parameter values.
Structure of PKW area:
Parameter identification zone
In the process of periodic Profibus-DP communication, PKW area is composed of four words
(16 bit), each word is defined as follows:
The first word PKW1 (16 bit)
267
Goodrive300 inverters
Bit 15~00
Appendix A
Task or response identification marks
0~7
The second word PKW2 (16 bit)
Bit 15~00
Basic parameters address
0~247
The third word PKW3 (16 bit)
Parameter value (high word) or return error
Bit 15~00
00
code value
The fourth word PKW4 (16 bit)
Bit 15~00
Parameter value (low word)
0~65535
Note: If the master requests one parameter value, the value of PKW3 and PKW4 will not be
valid.
Task requests and responses
When passing data to slave machine, master machine use request label while slave
machine use response label to positive or negative confirmation. Table 5.5 and Table 5.6 list
the request/response functional.
The definition of task logo PKW1 is as follows:
Definition of task logo PKW1
Request label (From master to slave)
Response label
Positive
Negative
Request
Function
confirmation
confirmation
0
No task
0
-
1
Request parameter value
1,2
3
1
3 or 4
2
3 or 4
1
3 or 4
2
3 or 4
2
Modification parameter value (one word) [only
change RAM]
3
4
5
Modification parameter value (double word) [only
change RAM]
Modification parameter value (one word) [RAM
and EEPROM are modified]
Modification parameter value (double word)
[RAM and EEPROM are modified]
Request label
"2"-modification parameter value (one word) [only change RAM],
"3"-modification parameter value (double word) [only change RAM]
"5"-modification parameter value (double word) [RAM and EPROM are modified] not
268
Goodrive300 inverters
Appendix A
support.
Reponses logo PKW1 defines as below:
Response label (From slave to master)
Confirmation
Function
0
No response
1
Transmission parameter value ( one word)
2
Transmission parameter value ( two word)
Task can not be executed and returns the following error number:
0: Illegal parameter number
1: Parameter values can not be changed (read-only parameter)
2: Out of set value range
3: The sub-index number is not correct
4: Setting is not allowed (only reset)
5: Data type is invalid
3
6: The task could not be implemented due to operational state
7: Request isn’t supported.
8: Request can’t be completed due to communication error
9: Fault occurs when write operation to stationary store
10: Request fails due to timeout
11: Parameter can not be assigned to PZD
12: Control word bit can’t be allocated
13: Other errors
4
No parameter change rights
Example 1: Read parameter value
Read keypad set frequency value (the address of keypad set frequency is 4) which can be
achieved by setting PKW1 as 1, PKW2 as 4, return value is in PKW4.
Request (From master to inverter):
PKW1 PKW2 PKW3 PKW4 CW PZD2 PZD3 ··· PZD12
Requst 00 01 00 04 00 00 00 00 xx xx xx xx xx xx ··· xx xx
0004: Parameter address
0001 Request read parameter
Response (From inverter to master)
269
Goodrive300 inverters
Appendix A
PKW1 PKW2 PKW3 PKW4 CW PZD2 PZD3 ··· PZD12
Response 00 01 00 04 00 00 50 00 xx xx xx xx xx xx ··· xx xx
5000: Address 4 parameter
0001: Reponse (Parameter values refreshed)
Example 2: Modify the parameter values (RAM and EEPROM are modified)
Modify keypad settings frequency value (the address of keypad set frequency is 4) which
can be achieved by setting PKW1 as 2; PKW2 as 4, modification value (50.00) is in PKW4.
Request (From master to inverter):
PKW1 PKW2 PKW3 PKW4 CW PZD2 PZD3 ··· PZD12
Requst 00 02 00 04 00 00 50 00 xx xx xx xx xx xx ··· xx xx
5000: Address 4 parameter
0004: Parameter changes
Response (From inverter to master)
PKW1 PKW2 PKW3 PKW4 CW PZD2 PZD3 ··· PZD12
Response 00 01 00 04 00 00 50 00 xx xx xx xx xx xx ··· xx xx
0001: Response (Parameter values refreshed)
Example for PZD:
Transmission of PZD area is achieved through inverter function code; please refer to
relevant INVT inverter user manual to know relevant function code.
Example 1: Read process data of inverter
Inverter parameter selects "8: Run frequency" as PZD3 to transmit which can be achieved
by setting Pd.14 as 8. This operation is mandatory until the parameter is instead of others.
Request (From master to inverter):
PKW1
Response xx
PKW2
xx xx xx
PKW3
PKW4
xx
xx
xx
xx
CW
xx
xx
PZD2
xx
xx
PZD3
00
0A
…
PZD12
…
xx
xx
Example 2: Write process data into inverter
Inverter parameter selects "2”: Traction given" from PZD3 which can be achieved by setting
Pd.03 as 2. In each request frame, parameters will use PZD3 to update until re-select a
parameter.
Request (From master to converter):
PKW1 PKW2 PKW3
PKW4
270
CW
PZD2
PZD3
…
PZD12
Goodrive300 inverters
Response xx
Appendix A
xx xx xx xx xx
xx
xx
xx
xx
xx
xx
00
00
…
xx
xx
In each request frame contents of PZD3 are given by traction until re-select a parameter.
A.2.9 Fault information
EC-TX-103 communication card is equipped with 2 fault display LEDs as shown is figure
below. The roles of these LEDs are as follows:
Fault display LEDs
LED No.
1
Name
Main
display
Color
Green
Red
2
Online
Green
3
Offline
Red
Function
ON--Connection works
ON-Connection lost for ever
Flashes- Connection lost for temporary
ON-module online and data can be exchanged.
OFF-module is not in "online" state.
ON-module offline and data can’t be exchanged.
OFF-module is not in "offline" state.
1. Flicker frequency 1Hz-configuration error: The length of
user parameter data sets is different from that of network
configuration process during module initialization process.
2. Flicker frequency 2Hz-user parameter data error: The
4
Fault
Red
length or content of user parameter data sets is different
from that of network configuration process during module
initialization process.
3. Flicker frequency 4Hz-Profibus communication ASIC
initialization error.
4. OFF-Diagnostic closed.
271
Goodrive300 inverters
Appendix B
Technical data
Appendix B
B.1 What this chapter contains
This chapter contains the technical specifications of the inverter, as well as provisions for
fulfilling the requirements for CE and other marks.
B.2 Ratings
B.2.1 Capacity
Inverter sizing is based on the rated motor current and power. To achieve the rated motor
power given in the table, the rated current of the inverter must be higher than or equal to the
rated motor current. Also the rated power of the inverter must be higher than or equal to the
rated motor power. The power ratings are the same regardless of the supply voltage within
one voltage range.
Note:
1. The maximum allowed motor shaft power is limited to 1.5 · PN. If the limit is exceeded,
motor torque and current are automatically restricted. The function protects the input bridge
of the drive against overload.
2. The ratings apply at ambient temperature of 40 °C
3. It is important to check that in Common DC systems the power flowing through the
common DC connection does not exceed PN.
B.2.2 Derating
The load capacity decreases if the installation site ambient temperature exceeds 40 °C, the
altitude exceeds 1000 metersor the switching frequency is changed from 4 kHz to 8, 12 or
15 kHz.
B.2.2.1 Temperature derating
In the temperature range +40 °C…+50 °C, the rated output current is decreased by 3% for
every additional 1 °C. Refer to the below list for the actual derating.
272
Goodrive300 inverters
Appendix B
B.2.2.2 Altitude derating
The device can output rated power if the installation site below 1000m. The output power
decreases if the altitude exceeds 1000 meters. Below is the detailed decreasing range of the
derating:
For 3-phase 200 V drives, the maximum altitude is 3000 m above sea level. In altitudes
2000…3000 m, the derating is 2% for every 100 m.
B.2.2.3 Carrier frequency derating
For Goodrive300 series inverters, different power level corresponds to different carrier
frequency range. The rated power of the inverter is based on the factory carrier frequency,
so if it is above the factory value, the inverter needs to derate 20% for every additional 1 kHz
carrier frequency.
B.3 Electric power network specification
AC 3PH 400V±15%
Voltage
AC 3PH 220V±10%
AC 3PH 660V±10%
Short-circuit
Maximum allowed prospective short-circuit current at the input
273
Goodrive300 inverters
Appendix B
power connection as defined in IEC 60439-1 is 100 kA. The drive is
capacity
suitable for use in a circuit capable of delivering not more than 100
kA at the drive maximum rated voltage.
Frequency
50/60 Hz ± 5%, maximum rate of change 20%/s
B.4 Motor connection data
Motor type
Voltage
Asynchronous induction motor or synchronous permanent magnet
motor
0 to U1, 3-phase symmetrical, Umax at the field weakening point
Short-circuit
protection
Frequency
Frequency
The motor output is short-circuit proof by IEC 61800-5-1
0...400 Hz
0.01 Hz
resolution
Current
Refer to Ratings
Power limit
Field weakening
point
Carrier frequency
1.5 · PN
10...400 Hz
4, 8, 12 or 15 kHz(in scalar control)
B.4.1 EMC compatibility and motor cable length
To comply with the European EMC Directive (standard IEC/EN 61800-3), use the following
maximum motor cable lengths for 4 kHz switching frequency.
All frame sizes
Maximum motor cable length, 4 kHz
With internal EMC filter
Second environment (category C3)
30
first environment (category C2)
30
Maximum motor cable length is determined by the drive’s operational factors. Contact your
local INVT representative for the exact maximum lengths when using external EMC filters.
B.5 Applicable standards
The inverter complies with the following standards:
EN ISO 13849-1: 2008
IEC/EN 60204-1:2006
Safety of machinery-safety related parts of control systems Part 1: general principles for design
Safety of machinery. Electrical equipment of machines. Part
274
Goodrive300 inverters
Appendix B
1: General requirements.
Safety of machinery – Functional safety of safety-related
IEC/EN 62061: 2005
electrical,electronic and programmable electronic control
systems
IEC/EN 61800-3:2004
IEC/EN 61800-5-1:2007
Adjustable speed electrical power drive systems. Part 3: EMC
requirements and specific test methods
Adjustable speed electrical power drive systems – Part 5-1:
Safety requirements – Electrical, thermal and energy
IEC/EN 61800-5-2:2007
Adjustable speed electrical power drive systems – Part 5-2:
Safety requirements. Functional.
B.5.1 CE marking
The CE mark is attached to the drive to verify that the drive follows the provisions of the
European Low Voltage and EMC Directives.
B.5.2 Compliance with the European EMC Directive
The EMC Directive defines the requirements for immunity and emissions of electrical
equipment used within the European Union. The EMC product standard (EN 61800-3:2004)
covers requirements stated for drives. See section EMC regulations
B.6 EMC regulations
EMC product standard (EN 61800-3:2004) contains the EMC requirements to the inverter.
First environment: domestic environment (includes establishments connected to a
low-voltage network which supplies buildings used for domestic purposes).
Second environment includes establishments connected to a network not directly supplying
domestic premises.
Four categories of the inverter:
Inverter of category C1: inverter of rated voltage less than 1000 V and used in the first
environment.
Inverter of category C2: inverter of rated voltage less than 1000 V other than pins, sockets
and motion devices and intended to be installed and commissioned only by a professional
electrican when used in the first environment.
Note: IEC/EN 61800-3 in EMC standard doesn’t limit the power distribution of the inverter,
but it defines the ustage, installation and commission. The professional electrician has
necessary skills in installing and/or commissioning power drive systems, including their EMC
aspects.
275
Goodrive300 inverters
Appendix B
Inverter of category C3: inverter of rated voltage less than 1000 V and used in the second
environment other than the first one
Inverter of category C4: inverter of rated voltage more than 1000 V or the nomninal current is
above or equal to 400A and used in the complicated system in second environment
B.6.1 Category C2
The emission limits are complied with the following provisions:
1. The optional EMC filter is selected according to the options and installed as specified in
the EMC filter manual.
2. The motor and control cables are selected as specified in this manual.
3. The drive is installed according to the instructions given in this manual.
4. For the maximum motor cable length with 4 kHz switching frequency, see EMC
compatibility and motor cable length
In a domestic environment, this product may cause radio inference, in
which case supplementary mitigation measures may be required.
B.6.2 Category C3
The immunity performance of the drive complies with the demands of IEC/EN 61800-3,
second environment.
The emission limits are complied with the following provisions:
1. The optional EMC filter is selected according to the options and installed as specified in
the EMC filter manual.
2. The motor and control cables are selected as specified in this manual.
3. The drive is installed according to the instructions given in this manual.
4. For the maximum motor cable length with 4 kHz switching frequency, see EMC
compatibility and motor cable length
A drive of category C3 is not intended to be used on a low-voltage
public network which supplies domestic premises. Radio frequency
interference is expected if the drive is used on such a network.
276
Goodrive300 inverters
Appendix C
Dimension drawings
Appendix C
C.1 What this chapter contains
Dimension drawings of the Goodrive300 are shown below. The dimensions are given in
millimeters andinches.
C.2 Keypad structure
C.2.1 Structure chart
C.2.2 Installaiton chart
277
Goodrive300 inverters
Appendix C
C.3 Inverter chart
C.4 Inverter chart
C.4.1 Wall installation
Wall installation of 1.5-30kW inverters
278
Goodrive300 inverters
Appendix C
Wall installation of 37-110kW inverters
Wall installation of 132-200kW inverters
Wall installation of 220-315kW inverters
Installation dimension (unit:mm)
Installation
Inverter model
W1
W2
H1
H2
D1
1.5kW~2.2kW
126
115
193
175
174.5
5
hole
4kW~5.5kW
146
131
263
243.5
181
6
7.5kW~11kW
170
151
331.5
303.5
216
6
15kW~18.5kW
230
210
342
311
216
6
22kW~30kW
255
237
407
384
245
7
37kW~55kW
270
130
555
540
325
7
75kW~110kW
325
200
680
661
365
9.5
132kW~200kW
500
180
870
850
360
11
220kW~315kW
680
230
960
926
379.5
13
279
Goodrive300 inverters
Appendix C
C.4.2 Flange installation
Flange installation of 1.5-30kW inverters
Flange installation of 37-110kW inverters
Flange installation of 132-200kW inverters
Installation dimension (unit:mm)
280
Goodrive300 inverters
Inverter model
W1
W2
Appendix C
W3
W4
H1
H2
H3
H4
D1
D2
Installation
hole
1.5kW~2.2kW
150
115
130
7.5
234
220
190
16.5
174.5
65.5
5
4kW~5.5kW
170
131
150
9.5
292
276
260
10
181
79.5
6
7.5kW~11kW
191
151
174
11.5
370
351
324
15
216.2
113
6
15kW~18.5kW
250
210
234
12
375
356
334
10
216
108
6
22kW~30kW
275
237
259
11
445
426
404
10
245
119
7
37kW~55kW
270
130
261
65.5
555
540
516
17
325
167
7
75kW~110kW
325
200
317
58.5
680
661
626
23
363
182
9.5
132kW~200kW
500
180
480
60
870
850
796
37
358
178.5
11
C.4.3 Floor installtion
Floor installation of 220-315kW inverters
281
Goodrive300 inverters
Appendix C
Floor installation of 350-500kW inverters
Installation
Inverter model
W1
W2
W3
W4
H1
H2
D1
D2
220kW~315kW
750
230
714
680
1410
1390
380
150
13\12
350kW~500kW
620
230
573
\
1700
1678
560
240
22\12
hole
282
Goodrive300 inverters
Appendix D
Peripherial options and parts
D.1 What this chapter contains
Appendix D
What this chapter contain
This chapter describes how to select the options and parts of Goodrive300 series.
D.2 Peripherial wiring
Below is the peripherial wiring of Goodrive300 series inverters.
Note:
1. The inverter below 30kW (including 30kW) are embedded with braking unit.
2.
Only the inverter above 37kW (including 37kW) have P1 terminal and are connected
with DC reators.
3.
The braking units apply standard braking unit DBU series in. Refer to the instruction of
DBU for detailed information.
Pictures
Name
Descriptions
Cables
Device to transfer the electronic signals
283
Goodrive300 inverters
Pictures
Appendix D
Name
Descriptions
Cables
Device to transfer the electronic signals
Prevent from electric shock and protect the
power supply and the cables system from
overcurrent when short circuits occur.
Breaker
(Please select
the breaker with the
function of reducing high order harmonic
and the rated sensitive current to 1 inverter
should be above 30mA).
This device is used to improve the power
Input reactor
factor of the input side of the inverter and
control the higher harmonic current.
The inverter above 37kW (including 37kW)
DC reactor
can be connected with DC reactor.
Control the electromagnetic interference
generated from the inverter, please install
Input filter
close to the input terminal side of the
inverter.
Shorten the DEC time
The inverters below 30kW(including 30kW)
Braking unit or resistors
only need braking resistors and the
inverters above 37kW(including 37 kW)
or
need braking units
Control the interference from the output
Output filter
side of the inverter and please install close
to the output terminals of the inverter.
Prolong the effective transimiting distance
of the inverter to control the sudden high
Output reactor
voltage when switchiong on/off the IGBT of
the inverter.
D.3 Power supply
Please refer to Electronical Installation.
284
Goodrive300 inverters
Appendix D
Check that the voltage degree of the inverter complies with the voltage
of the supply power voltage.
D.4 Cables
D.4.1 Power cables
Dimension the input power and motor cables according to local regulations.
•
The input power and the motor cables must be able to carry the corresponding load
currents.
•
The cable must be rated for at least 70 °C maximum permissible temperature of the
conductor in continuous use.
•
The conductivity of the PE conductor must be equal to that of the phase conductor
(same cross-sectional area).
•
Refer to chapter Technical Data for the EMC requirements.
A symmetrical shielded motor cable (see the figure below) must be used to meet the EMC
requirements of the CE.
A four-conductor system is allowed for input cabling, but a shielded symmetrical cable is
recommended. Compared to a four-conductor system, the use of a symmetrical shielded
cable reduces electromagnetic emission of the whole drive system as well as motor bearing
currents and wear.
Note: A separate PE conductor is required if the conductivity of the cable shield is not
sufficient for the purpose.
To function as a protective conductor, the shield must have the same cross-sectional area as
the phase conductors when they are made of the same metal.
To effectively suppress radiated and conducted radio-frequency emissions, the shield
conductivity must be at least 1/10 of the phase conductor conductivity. The requirements are
easily met with a copper or aluminum shield. The minimum requirement of the motor cable
shield of the drive is shown below. It consists of a concentric layer of copper wires. The
better and tighter the shield, the lower the emission level and bearing currents.
285
Goodrive300 inverters
Appendix D
D.4.2 Control cables
All analog control cables and the cable used for the frequency input must be shielded. Use a
double-shielded twisted pair cable (Figure a) for analog signals. Employ one individually
shielded pair for each signal. Do not use common return for different analog signals.
A double-shielded cable is the best alternative for low-voltage digital signals, but a
single-shielded or unshielded twisted multipair cable (Figure b) is also usable. However, for
frequency input, always use a shielded cable.
Note: Run analog and digital signals in separate cables.
The relay cable needs the cable type with braided metallic screen.
The keypad needs to connect with cables. It is recommended to use the screen cable on
complex electrical magnetic condition.
Note: Run analog and digital signals in separate cables.
Do not make any voltage tolerance or insulation resistance tests (for example hi-pot or
megger) on any part of the drive as testing can damage the drive. Every drive has been
tested for insulation between the main circuit and the chassis at the factory. Also, there are
voltage-limiting circuits inside the drive which cut down the testing voltage automatically.
Check the insulation of the input power cable according to local regulations before
connecting to the drive.
Recommended
cable size (mm2)
Connecting cable size (mm2)
The inverter
RST
UVW
PE
RST
P1
UVW
and(+)
screw
torque
PE
size
(Nm)
PB
(+) and
Terminal Tightening
(-)
GD300-1R5G-4
2.5
2.5
2.5~6
2.5~6
2.5~6
2.5~6
M4
1.2~1.5
GD300-2R2G-4
2.5
2.5
2.5~6
2.5~6
2.5~6
2.5~6
M4
1.2~1.5
GD300-004G-4
2.5
2.5
2.5~6
2.5~6
2.5~6
2.5~6
M4
1.2~1.5
286
Goodrive300 inverters
Appendix D
Recommended
cable size (mm2)
Connecting cable size (mm2)
The inverter
RST
UVW
PE
RST
P1
UVW
and(+)
screw
torque
PE
size
(Nm)
PB
(+) and
Terminal Tightening
(-)
GD300-1R5G-4
2.5
2.5
2.5~6
2.5~6
2.5~6
2.5~6
M4
1.2~1.5
GD300-2R2G-4
2.5
2.5
2.5~6
2.5~6
2.5~6
2.5~6
M4
1.2~1.5
GD300-004G-4
2.5
2.5
2.5~6
2.5~6
2.5~6
2.5~6
M4
1.2~1.5
GD300-5R5G-4
2.5
2.5
2.5~16
4~16
4~6
2.5~6
M4
1.2~1.5
GD300-7R5G-4
4
4
2.5~16
4~16
4~6
2.5~6
M5
2-~2.5
GD300-011G-4
6
6
6~16
6~16
6~10
6~10
M5
2-~2.5
GD300-015G-4
10
10
10~16
6~16
6~10
6~16
M5
2-~2.5
GD300-018G-4
16
16
16~25 16~25
6~10
10~16
M5
2-~2.5
GD300-022G-4
16
16
10~16 16~35 10~16
10~16
M6
4~6
GD300-030G-4
25
16
16~25 16~35 16~25
16~25
M6
4~6
GD300-037G-4
25
16
25~50 25~50 16~50
16~25
M8
9~11
GD300-045G-4
35
16
25~50 25~50 25~50
16~25
M8
9~11
GD300-055G-4
50
25
35~95 50~95 25~95
25
M8
9~11
GD300-075G-4
70
35
70~95 35~95 50~75
25~35
M10
18~23
GD300-090G-4
95
50
35~95 35~150 25~70 50~150
M10
18~23
M10
18~23
GD300-110G-4
120
70
95~300 70~300 35~300 70~240
GD300-220G-4
185
95
95~300 70~300 35~300 95~240
GD300-250G-4
240
120
95~300 95~300 70~300 120~240 It is recommended to
GD300-280G-4
95*2P
95
95~150 70~150 70~150 35~95 use
GD300-315G-4
150*2P
150
95~150 70~150 70~150 50~150 sleeve
GD300-350G-4
95*4P
95*2P
95~150 70~150 70~150 60~150 screw is used as
GD300-400G-4
95*4P
95*2P
95~150 70~150 70~150 70~150 terminal.
GD300-500G-4
95*4P
95*4P
95~150 70~150 70~150 70~150
wrench
or
because
Note:
1. It is appropriate to use the recommended cable size under 40℃ and rated current. The
wiring distance should be no more than 100m..
2. Terminals P1, (+), PB and (-) connects the DC reactor options and parts.
287
Goodrive300 inverters
Appendix D
D.4.3 Routing the cables
Route the motor cable away from other cable routes. Motor cables of several drives can be
run in parallel installed next to each other. It is recommended that the motor cable, input
power cable and control cables are installed on separate trays. Avoid long parallel runs of
motor cables with other cables to decrease electromagnetic interference caused by the rapid
changes in the drive output voltage.
Where control cables must cross power cables make sure that they are arranged at an angle
as near to 90 degrees as possible.
The cable trays must have good electrical bonding to each other and to the grounding
electrodes. Aluminum tray systems can be used to improve local equalizing of potential.
A figure of the cable routing is shown below.
D.4.4 Checking the insulation
Check the insulation of the motor and motor cable as follows:
1.
Check that the motor cable is connected to the motor and disconnected from the drive
output terminals U, V and W.
2.
Measure the insulation resistance between each phase conductor and the Protective
Earth conductor using a measuring voltage of 500 V DC. For the insulation resistance of
other motors, please consult the manufacturer’s instructions.
Note: Moisture inside the motor casing will reduce the insulation resistance. If moisture is
suspected, dry the motor and repeat the measurement.
D.5 Breaker and electromagnetic contactor
It is necessary to add fuse for the avoidance of overload.
It is appropriate to use a breaker (MCCB)which complies with the inverter power in the
3-phase AC power and input power and terminals (R,S,T). The capacity of the inverter
should be 1.5-2 times of the rated current.
288
Goodrive300 inverters
Appendix D
Due to the inherent operating principle and construction of circuit
breakers, independent of the manufacturer, hot ionized gases may
escape from the breaker enclosure in case of a short-circuit. To ensure
safe use, special attention must be paid to the installation and
placement of the breakers. Follow the manufacturer’s instructions.
It is necessary to install the electromagnetic contactor in the input side to control the
switching on and off safety of the main circuit. It can switch off the input power supply when
syatem fault.
The rated working
The inverter
Breaker (A)
Breaker (A)
current of the
GD300-1R5G-4
15
16
10
GD300-2R2G-4
17.4
16
10
contactor(A)
GD300-004G-4
30
25
16
GD300-5R5G-4
45
25
16
GD300-7R5G-4
60
40
25
GD300-011G-4
78
63
32
GD300-015G-4
105
63
50
GD300-018G-4
114
100
63
GD300-022G-4
138
100
80
GD300-030G-4
186
125
95
GD300-037G-4
228
160
120
GD300-045G-4
270
200
135
GD300-055G-4
315
200
170
GD300-075G-4
420
250
230
GD300-090G-4
480
315
280
GD300-110G-4
630
400
315
GD300-132G-4
720
400
380
GD300-160G-4
870
630
450
GD300-200G-4
1110
630
580
GD300-220G-4
1230
800
630
GD300-250G-4
1380
800
700
GD300-280G-4
1500
1000
780
289
Goodrive300 inverters
Appendix D
The rated working
The inverter
Breaker (A)
Breaker (A)
GD300-315G-4
1740
1200
GD300-350G-4
1860
1280
960
GD300-400G-4
2010
1380
1035
GD300-500G-4
2505
1720
1290
current of the
contactor(A)
900
D.6 Reactors
High current in the input power circuit may cause damage to the rectifying components. It is
appropriate to use AC reactor in the input side for the avoidance of high-voltage input of the
power supply and improvement of the power factors.
If the distance between the inverter and the motor is longer than 50m, frequent overcurrent
protection may occur to the inverter because of high leakage current caused by parasitic
capacitance effects from the long cables to the ground. In order to avoid the damage of the
motor insulation, it is necessary to add reactor compensation.
All the inverters above 37kW (including 37kW)are equipped with internal DC reactors for the
improvement of power factors and the avoidance of damage from high input current to the
rectifying components because of the high-capacity transformer. The device can also cease
the damage to the rectifying components which are caused by supply net voltage transients
and harmonic waves of the loads.
The power of the inverter
Input reactor
DC reactor
Output reactor
GD300-1R5G-4
ACL2-1R5-4
/
OCL2-1R5-4
GD300-2R2G-4
ACL2-2R2-4
/
OCL2-2R2-4
GD300-004G-4
ACL2-004-4
/
OCL2-004-4
GD300-5R5G-4
ACL2-5R5-4
/
OCL2-5R5-4
290
Goodrive300 inverters
Appendix D
The power of the inverter
Input reactor
DC reactor
Output reactor
GD300-7R5G-4
ACL2-7R5-4
/
OCL2-7R5-4
GD300-011G-4
ACL2-011-4
/
OCL2-011-4
GD300-015G/-4
ACL2-015-4
/
OCL2-015-4
GD300-018G-4
ACL2-018-4
/
OCL2-018-4
GD300-022G-4
ACL2-022-4
/
OCL2-022-4
GD300-030G-4
ACL2-030-4
/
OCL2-030-4
GD300-037G-4
ACL2-037-4
DCL2-037-4
OCL2-037-4
GD300-045G-4
ACL2-045-4
DCL2-045-4
OCL2-045-4
GD300-055G-4
ACL2-055-4
DCL2-055-4
OCL2-055-4
GD300-075G-4
ACL2-075-4
DCL2-075-4
OCL2-075-4
GD300-090G-4
ACL2-090-4
DCL2-090-4
OCL2-090-4
GD300-110G-4
ACL2-110-4
DCL2-110-4
OCL2-110-4
GD300-132G-4
ACL2-132-4
DCL2-132-4
OCL2-132-4
GD300-160G-4
ACL2-160-4
DCL2-160-4
OCL2-160-4
GD300-200G-4
ACL2-200-4
DCL2-200-4
OCL2-200-4
GD300-220G-4
ACL2-250-4
DCL2-250-4
OCL2-250-4
GD300-250G-4
ACL2-250-4
DCL2-250-4
OCL2-250-4
GD300-280G-4
ACL2-280-4
DCL2-280-4
OCL2-280-4
GD300-315G-4
ACL2-315-4
DCL2-315-4
OCL2-315-4
GD300-350G-4
Standard
DCL2-350-4
OCL2-350-4
GD300-400G-4
Standard
DCL2-400-4
OCL2-400-4
GD300-500G-4
Standard
DCL2-500-4
OCL2-500-4
Note:
1. The rated derate voltage of the input reactor is 2%±15%.
2. The power factor of the input side is above 90% after adding DC reactor.
3. The rated derate voltage of the output reactor is 1%±15%.
4. Above options are external, the customer should indicate when purchasing.
D.7 Filter
Goodrive300 series inverters have embedded C3 filters which can be connected by J10.
291
Goodrive300 inverters
Appendix D
The input interference filter can decrease the interference of the inverter to the surrounding
equipments.
Output interference filter can decrease the radio noise cause by the cables between the
inverter and the motor and the leakage current of the conducting wires.
Our company configured some filters for the convenient of the users.
D.7.1 Filter type instruction
Character
Detailed instruction
designation
A
B
FLT:inverter filter seriee
Filter type
P:power supply filter
Voltage degree
C
S2:signle phase 220Vac
04:3-phase 380Vac
D
3 bit rated current code “015” means 15A
Installation type
E
L: Common type
H: High performance type
Utilization environment of the filters
F
A:the
first
envirtonment
(IEC61800-3:2004)
category
C1
(EN
envirtonment
(IEC61800-3:2004)
category
C2
(EN
61800-3:2004)
B:the
first
292
Goodrive300 inverters
Appendix D
Character
Detailed instruction
designation
61800-3:2004)
C:the
second
envirtonment
(IEC61800-3:2004)
category
C3
61800-3:2004)
D.7.2 Filters selection table
Inverter
GD300-1R5G-4
Input filter
Output filter
FLT-P04006L-B
FLT-L04006L-B
FLT-P04016L-B
FLT-L04016L-B
FLT-P04032L-B
FLT-L04032L-B
FLT-P04045L-B
FLT-L04045L-B
FLT-P04065L-B
FLT-L04065L-B
FLT-P04100L-B
FLT-L04100L-B
FLT-P04150L-B
FLT-L04150L-B
FLT-P04200L-B
FLT-L04200L-B
FLT-P04250L-B
FLT-L04250L-B
FLT-P04400L-B
FLT-L04400L-B
FLT-P04600L-B
FLT-L04600L-B
FLT-P04800L-B
FLT-L04800L-B
GD300-2R2G-4
GD300-004G-4
GD300-5R5G-4
GD300-7R5G-4
GD300-011G-4
GD300-015G-4
GD300-018G-4
GD300-022G-4
GD300-030G-4
GD300-037G-4
GD300-045G-4
GD300-055G-4
GD300-075G-4
GD300-090G-4
GD300-110G-4
GD300-132G-4
GD300-160G-4
GD300-200G-4
GD300-220G-4
GD300-250G-4
GD300-280G-4
GD300-315G-4
GD300-350G-4
GD300-400G-4
293
(EN
Goodrive300 inverters
Appendix D
Inverter
Input filter
Output filter
GD300-500G-4
FLT-P041000L-B
FLT-L041000L-B
Note:
1. The input EMI meet the requirement of C2 after adding input filters.
2. Above options are external, the customer should indicate when purchasing.
D.8 Braking system
D.8.1 Select the braking components
It is appropriate to use braking resistor or braking unit when the motor brakes sharply or the
motor is driven by a high inertia load. The motor will become a generator if its actual rotating
speed is higher than the corresponding speed of the reference frequency. As a result, the
inertial energy of the motor and load return to the inverter to charge the capacitors in the
main DC circuit. When the voltage increases to the limit, damage may occur to the inverter. It
is necessary to apply braking unit/resistor to avoid this accident happens.
Only qualified electricians are allowed to design, install, commission
and operate on the inverter.
Follow the instructions in “warning” during working. Physical injury or
death or serious property may occur.
Only qualified electricians are allowed to wire. Damage to the inverter
or braking options and part may occur. Read carefully the instructions
of braking resistors or units before connecting them with the inverter.
Do not connect the braking resistor with other terminals except for PB
and (-). Do not connect the braking unit with other terminals except
for(+)and(-).Damage to the inverter or braking circuit or fire may occur.
Connect the braking resistor or braking unit with the inverter
according to the diagram. Incorrect wiring may cause damage to the
inverter or other devices.
Goodrive300 series inverters below 30kW (including 30kW) need internal braking units and
the inverters above 37kW need external braking unit. Please select the resistence and
power of the braking resistors according to actual utilization.
Type
Braking unit type
100% of
braking
294
The cousumped power of the
braking resistor
Mini
Braking
Goodrive300 inverters
Appendix D
10%
50%
80%
braking
braking
braking
GD300-1R5G-4
326
0.23
1.1
1.8
170
GD300-2R2G-4
222
0.33
1.7
2.6
130
GD300-004G-4
122
0.6
3
4.8
80
GD300-5R5G-4
89
0.75
4.1
6.6
60
GD300-7R5G-4
Internal braking
65
1.1
5.6
9
47
GD300-011G-4
unit
44
1.7
8.3
13.2
31
GD300-015G-4
32
2
11
18
23
GD300-018G-4
27
3
14
22
19
GD300-022G-4
22
3
17
26
17
GD300-030G-4
16
5
23
36
17
GD300-037G-4 DBU100H-060-4
13
6
28
44
11.7
GD300-045G-4
10
7
34
54
GD300-055G-4 DBU100H-110-4
8
8
41
66
GD300-075G-4
6.5
11
56
90
ID300-090G-4
5.4
14
68
108
GD300-110G-4
4.5
17
83
132
GD300-132G-4 DBU100H-220-4
3.7
20
99
158
GD300-160G-4
3.1
24
120
192
2.5
30
150
240
2.2
33
165
264
GD300-250G-4
2.0
38
188
300
GD300-280G-4
3.6*2
21*2
105*2
168*2
3.2*2
24*2
118*2
189*2
GD300-350G-4 DBU100H-320-4
2.8*2
27*2
132*2
210*2
GD300-400G-4
2.4*2
30*2
150*2
240*2
2*2
38*2
186*2
300*2
DBU100H-160-4
DBU100H-320-4
GD300-200G-4
GD300-220G-4
GD300-315G-4
DBU100H-400-4
Two
6.4
4.4
3.2
2.2
1.8
2.2*2
Two
GD300-500G-4
DBU100H-400-4
1.8*2
Note:
Select the resistor and power of the braking unit according to the data our company
provided.
295
Goodrive300 inverters
Appendix D
The braking resistor may increase the braking torque of the inverter. The resistor power in
the above table is designed on 100% braking torque and 10% braking usage ratio. If the
users need more braking torque, the braking resistor can decrease properly and the power
needs to be magnified.
When using the external braking units, please see the instructions of the energy braking
units to set the voltage degree of the braking unit. Incorrect voltage degree may affect the
normal running of the inverter.
Never use a brake resistor with a resistance below the minimum value
specified for the particular drive. The drive and the internal chopper are
not able to handle the overcurrent caused by the low resistance.
Increase the power of the braking resistor properly in the frequent
braking situation (the frequency usage ratio is more than 10%).
D.8.2 Selecting the brake resistor cables
Use a shielded cable to the resistor cable.
D.8.3 Placing the brake resistor
Install all resistors in a place where they will cool.
The materials near the brake resistor must be non-flammable. The
surface temperature of the resistor is high. Air flowing from the resistor
is of hundreds of degrees Celsius. Protect the resistor against contact.
Installation of the braking resistor:
The inverters below30kW (including 30kW) only needs external braking
resistors.
PB and(+)are the wiring terminals of the braking resistors.
Installation of braking units:
The inverters above 37kW (including 370kW) only needs external
braking units.
(+),(-) are the wiring terminals of the braking units.
296
Goodrive300 inverters
Appendix D
The wiring length between the (+),(-) terminals of the inverter and the
(+),(-) terminals of the braking units should be no more than 5m,and the
distributing length among BR1 and BR2 and the braking resistor
terminals should be no more than 10m.
Signal installation is as below:
297
Goodrive300 inverters
Appendix E
Further information
Appendix E
E.1.1 Product and service inquirie
Address any inquiries about the product to your local INVT offices, quoting the type
designation and serial number of the unit in question. A listing of INVT sales, support and
service contacts can be found by navigating to www.invt.com.cn.
E.1.2 Providing feedback on INVT Inverters manuals
Your comments on our manuals are welcome. Go to www.invt.com.cn and select Online
Feedback of Contact Us.
E.1.3 Document library on the Internet
You can find manuals and other product documents in PDF format on the Internet. Go to
www.invt.com.cn and select Service and Support of Document Download.
298
C
E