
1
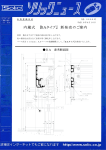
YASKAWA 安川産業用ロボット MOTOMAN-PXシリーズ 用途:塗装 可搬質量 3/10/15/20kg 6軸垂直多関節形 台中:886-4-23588755 台灣省新北市土城區忠承路83號9樓 北京:010-64882666轉8008 電話:886 2 2268-4088 天津:022-58853955 傳真:886 2 2268-4086 昆山:0512-57458588 網址:http://www.bfcoating.com 廈門:0592-6074228 邮箱:[email protected] 南海:0757-81139110 台南:886-6-2709257 北應機:010-64985309 上海:021-64839459 寧波:0574-87791683 東莞:0769-85415416 重慶:023-67700577 品質及び環境マネージメント システムの国際規格 ISO9001, ISO14001を取得しています。 QMS Accreditation R009 JQA-0813 JQA-EM0924 資料番号 KA-C945-465C 2 マニピュレータ ■ 充実のラインアップ 小物部品から自動車ボディのような大形部品や機械まで対応できるように, 8種類の マニピュレータを取りそろえています。 PX800シリーズは, 世界最小塗装ロボットで, 作業スペースを有効に使用でき,設置も短時間で行なえます。PX1450∼PX2900 シリーズのロボットは, 上腕部に塗装機器(24色CCV,FGP, 洗浄バルブユニット, マスタバルブなど)が搭載でき, 色替え時間の短縮や塗料・シンナーの廃液量低減にも 貢献します(壁掛け, 天井つり設置を除く)。 ■ ワークに合わせた手首構造 ワークに最適な塗装ができるように, 3種類の手首構造で対応いたします。また, 手首・ 上腕部はシンナーによる洗浄も可能です。 ●スリーロール形: 自動車ボディや箱物の内面塗装に有効。 ●レンマ形 : 前面・平面塗装に有効。 オフセットは左右どちらかを選択可能。 ●中空形 : 手首内にチューブ・ケーブルを収納する中空部を設置。 このため, チューブに付着した塗料ミストの落下による塗装不良 の低減と配管短縮による廃液量の低減を実現します。さらに, 手首 軸とホースの干渉もなくなり, タクトタイムも短縮できます。 ■ 内板塗装に威力を発揮 自動車などの内板塗装用途に最適な「中空スリムアームタイプ」3機種をラインアップ しました。塗装チューブを内蔵できる中空径φ50mm, 外径φ95mmのスリムなUアー ムを採用したことで箱物の内部であってもワークとの干渉が少なく, スムーズに塗装 できます。 コントローラ ■ 高性能制御 MOTOMAN専用制御盤 YASNAC XRCは, 塗装ガンを含めた塗装機器とマニピュ レータを一元的かつ最適に制御できるため, 塗装品質が向上します。 さらに, 高精度 軌跡制御・振動抑制制御が実現できるARM制御の搭載により, スプレーON・OFF 回数やオーバスプレーを減少し, 生産性が大きくアップします。 ■ 多機能 塗装プログラムの作成・管理を容易にするため, ガン制御命令(スプレー開始・停止命 令, 塗装条件命令)をサポートしています。 また, 総合的な塗装条件は, 塗装条件 ファイルにより管理できます。 さらに, 標準的なネットワーク (Ethernet, Device-Net, CC-Linkなど)に対応しており, 塗装機制御盤やライン管理盤など周辺機器との接続 が容易です。 プログラミングペンダント ●標準タイプ : 5.7インチ大形LCDを採用しています。 アイコン, プルダウン メニューにより, ティーチングや編集作業が簡単で, 操作時間 を短縮します。 ●防爆対応タイプ : 4.7インチの大形LCDで, 多くの塗装データやジョブ内容を表 示できます。 3 Manipulator 小形塗装ロボット 小形塗装ロボット (スリーロール形) ■標準仕様 名 称 形 式 ■標準仕様 MOTOMAN-PX800 YR-PX800-A02 YR-PX800-B00 (国内仕様) (FM仕様) 垂直多関節形(6自由度) 3kg ±0.03mm ±60° (床置き, 天吊り時は±170° ) +150° ,−45° +190° ,−70° ±165° ±135° ±350° 2.62rad/s,150° /s 2.09rad/s,120° /s 3.40rad/s,195° /s 5.23rad/s,300° /s 5.23rad/s,300° /s 7.33rad/s,420° /s 5.39N・m 5.39N・m 2.94N・m 0.1kg・m2 0.1kg・m2 0.03kg・m2 本質安全防爆構造(i2G4)及び Class1, Division1, 内圧防爆構造(f2G4) Group A, B, C & D 42kg 床置き,壁掛け,天吊り 1.5kVA 構 造 可搬質量 繰り返し位置決め精度*1 S軸 (旋回) 動 L軸 (下腕) 作 U軸(上腕) R軸 (手首旋回) 範 B軸 (手首振り) 囲 T軸 (手首回転) S軸 最 L軸 大 U軸 R軸 速 B軸 度 T軸 R軸 リスト許容 B軸 モーメント T軸 R軸 リスト許容 慣性モーメント B軸 (GD2/4) T軸 防爆構造 本体質量 設置方法 電源容量*2 *1:JIS B 8432に準拠しています。 *2:動作パターンにより異なります。 名 形 称 MOTOMAN-PX1450 YR-PX1450-A20 (国内仕様) 式 YR-PX1450-B20 (FM仕様) 垂直多関節形(6自由度) 構 造 10kg 可搬質量 ±0.5mm 繰り返し位置決め精度*1 ±90° (壁掛け時は±27.5° ) S軸 (旋回) +100° ,−50° L軸 (下腕) 動 U軸(上腕,下腕相対角) 6∼163° 作 範 R軸 (手首旋回) ±260° 囲 B軸 (手首振り) ±140° T軸 (手首回転) ±260° 2.0m/s 最大速度 R軸 34.1N・m リスト許容 B軸 34.1N・m モーメント T軸 9.8N・m R軸 リスト許容 1.21kg・m2 慣性モーメント B軸 1.21kg・m2 (GD2/4) T軸 0.10kg・m2 本質安全防爆構造(i2G4)及び Class1, Division1, 防爆構造 Group A, B, C & D 内圧防爆構造(f2G4) 本体質量 345kg 設置方法 床置き,壁掛け,天吊り 電源容量*2 5kVA *1:JIS B 8432に準拠しています。 *2:動作パターンにより異なります。 ■外形寸法及び動作範囲 単位:mm ■外形寸法及び動作範囲 単位:mm 2914 R7 98 R3 30 ゚ 90 90 ゚ R14 57 P点 23 R6 R586 ° 60 771 767 320 70 67 310 300 154 245 1542 1202 320 561 6゚ 5 ±260° P点 ゚ 70° 60° 0゚ 100 ° 150 45° 150 ±140° 6゚ (注) 12 P点動作範囲 ±260° ゚ 87 600 561 234 500 163゚ 295 600 87 100 P点 958 441 1016 1457 手首先端フランジ P.C 手首先端フランジ .D. 32 (注)この範囲で長時間姿勢を保持すると,サーボアラームが発生する場合が あります。詳細はマニピュレータ取扱説明書を参照してください。 φ5H7 穴深さ7 8-M6タップ 深さ9 4-M5XP0.8 タップ深さ9 P.C .D 45° 4 .31 .5 61 1253 1818 ° 1757 60 Manipulator 小形塗装ロボット (レンマ形) 小形塗装ロボット (スリーロール形) ■標準仕様 名 形 ■標準仕様 称 名 MOTOMAN-PX1450 YR-PX1450-A30 (国内仕様) 式 YR-PX1450-B30 (FM仕様) 形 称 MOTOMAN-PX1850 YR-PX1850-A20 (国内仕様) 式 YR-PX1850-B20 (FM仕様) 垂直多関節形(6自由度) 構 造 10kg 可搬質量 ±0.5mm 繰り返し位置決め精度*1 ±90° (壁掛け時は±27.5° ) S軸 (旋回) +100° ,−50° L軸 (下腕) 動 U軸(上腕,下腕相対角) 6∼163° 作 範 R軸 (手首旋回) ±260° 囲 B軸 (手首振り) ±270° T軸 (手首回転) ±260° 2.0m/s 最大速度 R軸 30.4N・m リスト許容 B軸 19.6N・m モーメント T軸 9.8N・m R軸 リスト許容 0.97kg・m2 慣性モーメント B軸 0.40kg・m2 (GD2/4) T軸 0.10kg・m2 本質安全防爆構造(i2G4)及び Class1, Division1, 防爆構造 Group A, B, C & D 内圧防爆構造(f2G4) 本体質量 360kg 設置方法 床置き,壁掛け,天吊り 電源容量*2 5kVA 垂直多関節形(6自由度) 構 造 10kg 可搬質量 ±0.5mm 繰り返し位置決め精度*1 ±90° S軸 (旋回) +100° ,−50° L軸 (下腕) 動 U軸(上腕,下腕相対角) 6∼163° 作 範 R軸 (手首旋回) ±260° 囲 B軸 (手首振り) ±140° T軸 (手首回転) ±260° 2.0m/s 最大速度 R軸 34.1N・m リスト許容 B軸 34.1N・m モーメント T軸 9.8N・m R軸 リスト許容 1.21kg・m2 慣性モーメント B軸 1.21kg・m2 (GD2/4) T軸 0.10kg・m2 本質安全防爆構造(i2G4)及び Class1, Division1, 防爆構造 Group A, B, C & D 内圧防爆構造(f2G4) 本体質量 360kg 設置方法 床置き,壁掛け 電源容量*2 5kVA *1:JIS B 8432に準拠しています。 *2:動作パターンにより異なります。 *1:JIS B 8432に準拠しています。 *2:動作パターンにより異なります。 ■外形寸法及び動作範囲 単位:mm ■外形寸法及び動作範囲 単位:mm 2914 165 3670 R14 57 P点 ゚ 90 90 ゚ ±90° 23 R6 R586 500 93 P点動作範囲 163゚ 154 ±140゚ ±260° ±260° 10 0゚ 650 50゚ 1583 2135 2532 1818 ±260° 1757 6゚ ゚ 600 ±270° 15 4° 397 600 20° 600 ゚ 100 1542 40゚ 163 ゚ 50 6゚∼ 6゚ 245 245 141.5 ±260° ゚ 88 300 194 850 93 P点 275 365 1016 61 640 441 1375 460 1835 392 手首先端フランジ P.C .D. 3 2 1457 手首先端フランジ 8-M6XP1.0 タップ深さ9 2 .D.3 P.C φ4 5(回 8-M6タップ 深さ9 転部 外径 ) 5 Manipulator 小形塗装ロボット (レンマ形) 中形塗装ロボット (スリーロール形) ■標準仕様 名 形 ■標準仕様 称 名 MOTOMAN-PX1850 YR-PX1850-A30 (国内仕様) 式 構 造 可搬質量 繰り返し位置決め精度*1 S軸 (旋回) L軸 (下腕) 動 U軸(上腕,下腕相対角) 作 範 R軸 (手首旋回) 囲 B軸 (手首振り) T軸 (手首回転) 最大速度 R軸 リスト許容 B軸 モーメント T軸 R軸 リスト許容 慣性モーメント B軸 (GD2/4) T軸 防爆構造 本体質量 設置方法 電源容量*2 YR-PX1850-B30 (FM仕様) 垂直多関節形(6自由度) 10kg ±0.5mm ±90° +100° ,−50° 6∼163° ±260° ±270° ±260° 2.0m/s 30.4N・m 19.6N・m 9.8N・m 0.97kg・m2 0.40kg・m2 0.10kg・m2 本質安全防爆構造(i2G4)及び Class1, Division1, Group A, B, C & D 内圧防爆構造(f2G4) 360kg 床置き,壁掛け 5kVA *1:JIS B 8432に準拠しています。 *2:動作パターンにより異なります。 形 称 MOTOMAN-PX2050 YR-PX2050-A20 (国内仕様) 式 YR-PX2050-B20 (FM仕様) 垂直多関節形(6自由度) 構 造 10kg 可搬質量 ±0.5mm 繰り返し位置決め精度*1 ±90° (壁掛け時は±27.5°) S軸 (旋回) +100° ,−50° L軸 (下腕) 動 U軸(上腕,下腕相対角) 5∼163° 作 範 R軸 (手首旋回) ±260° 囲 B軸 (手首振り) ±140° T軸 (手首回転) ±260° 2.0m/s 最大速度 R軸 34.1N・m リスト許容 B軸 34.1N・m モーメント T軸 9.8N・m R軸 リスト許容 1.21kg・m2 慣性モーメント B軸 1.21kg・m2 (GD2/4) T軸 0.10kg・m2 本質安全防爆構造(i2G4)及び Class1, Division1, 防爆構造 Group A, B, C & D 内圧防爆構造(f2G4) 本体質量 370kg 設置方法 床置き,壁掛け 電源容量*2 5kVA *1:JIS B 8432に準拠しています。 *2:動作パターンにより異なります。 ■外形寸法及び動作範囲 単位:mm ■外形寸法及び動作範囲 単位:mm 4070 3670 165 ±90° ±90° 194 93 ±140゚ ±260° 88 ±260° 850 194 ±260° 245 88 850 93 850 1783 10 0゚ 2335 50゚ 600 432 397 600 10 2767 245 650 ° 0° 1583 2135 141.5 50° 63 ±270° ゚ 163 5゚∼ ∼1 6° 2532 ±260° 275 365 275 365 640 640 1395 440 1460 1835 手首先端フランジ 392 8-M6XP1.0 タップ深さ9 2 φ4 5(回 6 手首先端フランジ 545 8-M6XP1.0 タップ深さ9 2 .D.3 .D.3 P.C 575 2035 P.C φ4 5(回 転部 外径 ) 転部 外径 ) Manipulator 中形塗装ロボット (レンマ形) 大形塗装ロボット (レンマ形) ■標準仕様 名 形 ■標準仕様 称 名 MOTOMAN-PX2050 YR-PX2050-A30 (国内仕様) 式 構 造 可搬質量 繰り返し位置決め精度*1 S軸 (旋回) L軸 (下腕) 動 U軸(上腕,下腕相対角) 作 範 R軸 (手首旋回) 囲 B軸 (手首振り) T軸 (手首回転) 最大速度 R軸 リスト許容 B軸 モーメント T軸 R軸 リスト許容 慣性モーメント B軸 (GD2/4) T軸 防爆構造 本体質量 設置方法 電源容量*2 YR-PX2050-B30 (FM仕様) 垂直多関節形(6自由度) 10kg ±0.5mm ±90° (壁掛け時は±27.5°) +100° ,−50° 5∼163° ±260° ±270° ±260° 2.0m/s 30.4N・m 19.6N・m 9.8N・m 0.97kg・m2 0.40kg・m2 0.10kg・m2 本質安全防爆構造(i2G4)及び Class1, Division1, Group A, B, C & D 内圧防爆構造(f2G4) 370kg 床置き,壁掛け 5kVA *1:JIS B 8432に準拠しています。 *2:動作パターンにより異なります。 形 称 MOTOMAN-PX2750 YR-PX2750-A30 (国内仕様) 式 構 造 可搬質量 繰り返し位置決め精度*1 S軸 (旋回) L軸 (下腕) 動 U軸(上腕,下腕相対角) 作 範 R軸 (手首旋回) 囲 B軸 (手首振り) T軸 (手首回転) 最大速度 R軸 リスト許容 B軸 モーメント T軸 R軸 リスト許容 慣性モーメント B軸 (GD2/4) T軸 防爆構造 本体質量 設置方法 電源容量*2 YR-PX2750-B30 (FM仕様) 垂直多関節形(6自由度) 10kg ±0.5mm ±150° +90° ,−40° 10∼168° ±260° ±270° ±260° 2.0m/s 30.4N・m 19.6N・m 9.8N・m 0.97kg・m2 0.40kg・m2 0.10kg・m2 本質安全防爆構造(i2G4)及び Class1, Division1, Group A, B, C & D 内圧防爆構造(f2G4) 560kg 床置き 5kVA *1:JIS B 8432に準拠しています。 *2:動作パターンにより異なります。 ■外形寸法及び動作範囲 単位:mm ■外形寸法及び動作範囲 単位:mm 5458 4070 165 165 ±150° ±90° 850 194 1298 210 88 136 93 ±260° 285 1100 ° 90 141.5 40° 600 600 ±260° ±270° 68° ∼1 10° 3758 3029 850 0° ° 1783 ° 50 10 141.5 ±270° 3 16 2335 ±260° 5°∼ 2767 245 ±260° 432 35 275 365 1460 760 575 2035 手首先端フランジ 300 460 729 640 2078 93 2125 2729 545 8-M6XP1.0 タップ深さ9 2 φ4 618 8-M6XP1.0 タップ深さ9 P.C φ4 5(回 2 .D.3 .D.3 P.C 手首先端フランジ 604 5(回 転部 外径 ) 転部 外径 ) 7


















![CURSA [1ex] Catalogue and Table Manipulation](http://vs1.manualzilla.com/store/data/005911996_1-56034bbec42ed74359b0b23f04aae37f-150x150.png)






