1
FMS-800 Software User's Manual
INU, GPS, and Integrated INU-GPS Navigation
INo, GPS, and Integrated INU-GPS Navigation
19.1 NAVIGATIONAL
SYSTEM OVERVIEW
Five independent navigational selections for the
pilot's and copilot's steering functions are provided.
The normal navigational selections are GPS, INUl,
INUl/GPS, INU2, and INU2/GPS. If a pilot selects
INU3 as the attitude and navigational source using the
external auxiliary selector, then INU3 replaces INUI
or INU2 as a selectable navigational source.
The fundamental
difference
Toggles navigational source
for pilot steering:
INU1/GPS
INU2/GPS
INU1
INU2
GPS
between
the INU
solutions and the INU/GPS solutions following loss of
GPS information (INUI- - -) is that the INU outputs
in the INU/- - - solution are corrected with the
Kalman Filter estimated INU "real time" drift errors
computed while GPS data was available, resulting in a
more accurate navigational solution than the INU
alone would provide.
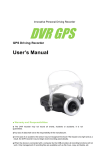
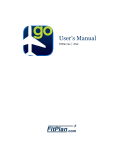
The navigational sources being used for the pilot's and
copilot's steering are indicated on the Pilot and
Copilot Lateral Steering Pages as shown in Figure 82.
Pressing the STR key accesses the
last-viewed
Steering Page; laterally and/
or vertically scroll if necessary to access
the Pilot or Copilot Lateral Steering Page
:INU1/GPS
~
~
~
BRT
o
CMD GS: 18::
pilot str
CID
DTK 025°
TTG
ETA
BRG/DIST
0:05:38
021"
02~/23. 5
XTK R15.0nm
DA:L1.2°
+[
Similar selections
available for copilot
steering on Copilot
Steering page
Figure 82 Pilot Lateral Steering and Steer Select Pages
16 May 1997
CPN: 988-4610-001,
USAF C-5 Version
117
Rev A
FMS-800 Software User's Manual
INU, GPS, and Integrated INU-GPS
19.2 POSITION,
Navigation
TRACK, AND AIR DATA DISPLAYS
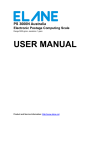
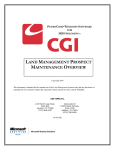
The steering selections determine the sources of the
data for the Pilot and Copilot Position Pages shown in
Figure 83. The air data shown on these pages comes
from the central air data computers
CADCl
or
CADC2.
The baroset input sets the local barometric
pressure for VNAV enroute, terminal, and approach
guidance.
The wind vector can be displayed as a current wind
vector, crosswind component,
or head/tail
wind
component.
Pressing the PSN key accesses the
last-viewed Position Page; laterally
scroll if necessary to access the
Pilot or Copilot Position Page
Navigation source selected on
Pilot/Copilot Lateral Steer Pages
Track displays true or
mag track, depending on
external true/mag switch
position
Toggle to display WIND,
HEADWIND or TAILWIND
(depending on wind
condition), or crosswind
("XWIND"); enter wind
manually if CADC fails
N4~OO.432
INU1/GPS
TRK 118~
WIND
:24~T/5
W09~34.432
pilot psn
VAR W22.4°
GS SAT TAS
291 +25C 293
BAROSET[29.71]
-[
:i
]
Computed mag var
at present position
Toggle between inches
and millibars with
empty scratchpad;
displays selected
baroset on the
"designated pilot's"
barometric altimeter
Figure 83 Pilot Position Page
118
16 May 1997
CPN: 988-4610-001, Rev A
USAF C-5 Version
FMS-800 Software User's Manual
INU, GPS, and Integrated INU-GPS Navigation
Table 5 Display of Navigation Mode on Position Pages
Selected Mode
Displayed
Mode
Conditions for Display
INU1/GPS
INUl/GPS
INU1 and GPS .are being used in the INU1/GPS integrated
solution
INU1/GPS
INU1/---
GPS is not being incorporated
solution
INU1/GPS
---1/---
INU2/GPS
INU2/GPS
---/-/-
MODEL
---2
---1
INU2
INU1
INU2/GPS . ---/A/H
GPS/-/H
GPS/-/GPS/A/H
---2/--INU2/---
MODEL
GPS
INU2
GPS
INU1
NU2
NU1
GPS
GPS
INU2/GPS
into the INUl/GPS integrated
INU1 navigation data is invalid
INU2 and GPS are being used in the INU2/GPS integrated
solution
GPS is not being incorporated
solution
into the INU2/GPS integrated
INU2 navigation data is invalid
INU1 navigation data is valid
INU1 navigation data is invalid
INU2 navigation data is valid
INU2 navigation data is invalid
GPS navigation data is smoothed with airspeed and heading
GPS navigation data is being smoothed with GPS ground speed
and heading data
GPS is not being smoothed with airspeed and heading data
GPS is invalid;
heading data
FMS is dead reckoning
with airspeed
and
GPS is invalid
The model aircraft function is providing the navigation
solution. (This function is available only while on the ground.)
16 May 1997
CPN: 988-4610-001,
USAF C-5 Version
119
Rev
A
FMS-BOO Software User's Manual
/NU, GPS, and Integrated /NU-GPS
19.3 NAVIGATIONAL
SOURCE
Navigation
DATA DISPLAYS
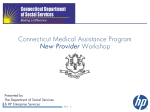
Each navigational
source (whether
selected for
pilot/copilot
steering
or not) has its own
Integrated
Navigation
(INAV) Page to display its
current
position
and navigational
status
(see
Figure 84), not dependent
on whether that source
is being used as either pilot's steering selection.
Table
5 provides
a summary
of the possible
navigation
sources
that are available
and the
current status of each source.
when compared
with the known aircraft position
(greater
than lOOnm), the "INAV RESET"
line
select key may be used to zero the Kalman Filter
error estimates
and re-start
its process.
This
action requires
confirmation.
"INAV RESET"
will not degrade
normal navigational
accuracy,
but it will eliminate
the benefit of the INU error
estimates
if GPS data should become unavailable
before they can be re-estimated
(usually about
half an hour after resetting).
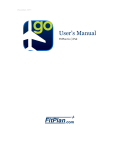
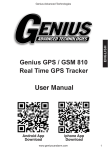
19.3.1 INUl/GPS and INU2/GPS Displays
The INUl/GPS
and INU2/GPS INAV Pages show
the computed present position of those integrated
navigation
solutions,
along with a "95% error"
figure of merit for the probable
system accuracy
given the currentINU
alignment and GPSsatellite
navigational
quality (see Figure
85). This page
also shows the difference between its navigational
position
and that of the "designated
pilot's"
selected
steering
solution
(if it is a different
source).
If, due to a grossly mis - aligned INU or other
anomalous condition, the position shown is incorrect
If GPS data becomes unavailable
en route, the
previously-computed
INU corrections
will
continue
to be applied
to this navigational
solution,
so it will be more accurate
than the
uncorrected
INU solution.
However, to enable
the crew to manually
update
the solution
if
necessary,
the "UPDATE"
line select
key
becomes available and may be used as described in
Section 19.4.
Manually
remove
GPS inputs to an INU/GPS
solution by toggling the "GPS" line select key to
"OUT".
To enable the inputs once again, toggle to
"USE".
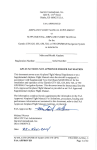
Pressing the lNAV key accesses
the last-viewed INAV Page;
laterally scroll if necessary to
access the desired solution page
.
. •
lNUl
•
inav
Scrolls laterally
among INAV
Pages
IiIJr
•..
•••- •= • •~• •
Secondary
inav
GPSGPS
inav
-
8~
Figure
120
- •
-
-
84 Navigation
Source INAV Page Selection
16 May 1997
CPN: 988-4610-001,
Rev A
USAF C-5 Version
FMS - 800 Software User's Manual
INU, GPS, and Integrated INU-GPS Navigation
95% probable
position error
INU1/GPS present position
N42°00.432
W093°
inav
0.07
4.43
lNU1/GPS
Difference from
"designated pilot's"
source
Resets Kalman Filter
estimation of INU
errors to zero
95%ERR
Toggles between
GPS USE or OUT in
KALMAN filter
DIFF lNU1/GPS
Selects the INU1/GPS
Update Page. This
selection appears and is
available only when GPS
data is unavailable, see
Section 19.4.
INAV RESET
-[
Figure 85 INU/GPS Integrated Navigation Page
19.3.2 INUI,INU2
and INU3 Displays
The INUI and INU2 and INU3 INAV Pages show the
present position from the respective INUs, along with
the alignment circular error probable (CEP) (see
Figure 86). The current alignment mode is also
displayed. The "DIFF" readout shows the difference
between the INU position and the "designated
pilot's" selected steering solution (if it is a different
source).
These pages also provide access to the individual INU
control page functions of the Carousel IV INUs, as
shown in Figure 86.
Each INU's Control Page may only be accessed from
the CDU which directly interfaces with that INU; i.e.,
INUI may only be controlled via CDUl, INU2 may
only be controlled via CDU2, and INU3 may only be
controlled via CDU3. Once a control page has been
accessed for an INU, the procedures for initializing,
controlling and displaying data for that INU is as
described in the Carousel IV operational procedures.
The "DTK-STS" selection is provided to access the
INU status codes and enter modes and code data into
the INU. Normal entries from the INU operator's
guide are provided.
To enable Triple Mix operations, enter "4" and press
"INSERT". Caution: Triple Mix is a reversionary
navigation state that should be used only when GPS
data is unavailable. Use of a Triple Mix INU solution
16 May 1997
CPN: 988-4610-001,
USAF C-5 Version
with the GPS integrated
solutions can cause
unpredictable behavior in the integrated solution.
DO NOT use Triple Mix modes with the INU/GPS
solutions.
To disable Triple Mix operations, enter "5" and press
"INSERT".
The "POSITION" selection is provided for entering
alignment present position. As a reminder to enter
the present position, the annunciation line will display
INUx PP (where x = 1, 2, or 3). After selecting the
position function, the alignment position is entered,
first a latitude, followed by "INSERT", then a
longitude, followed by "INSERT". After the INU
Mode Select Unit has transitioned to alignment, the
current alignment state can be monitored by selecting
"DTK-STS".
The "TEST" and AUTO/MAN selections are
provided to initiate INU tests and verify proper
behavior of the Inertial system. When on the
DTK-STS selection, TEST is used to review each of
the INU status codes.
The "WAY PT" selection is used to review the pure
inertial data prior to disabling Triple Mix operation.
To review pure inertial data, press "HOLD", then
select the WAY PT toggle selection. Note: True
waypoints are entered into the FMS flight plan, not on
the INU waypoint list.
The "HDG-DA" selection is used to review the
current INU heading and drift angle.
121
Rev A
FMS-800 Software User's Manual
/NU, GPS, and Integrated INU-GPS Navigation
The "HOLD" selection is used to hold the present
position and review the data for updating the INU.
Caution: The FMS-800 allows manual updates of the
INU per the INU operator's manual procedures.
Manually updating an INU with this procedure can
cause adverse effects to the Kalman filter models of
the FMS-800 and temporarily degrade the Kalman
filtered navigation solution.
The TESTIHOLD and TEST buttons can be used
together to review INU Fault History. See the INU
operator's guide for further instructions.
The Remote and Hold selections are used to enable
gimbal testing of the INU in accordance with INU
TOs.
Present INU1 position
N42~O.432 W093~4.432
lNUl inav
DIFF lNU1/GPS ----nm
Difference from
"designated pilot's"
source
Selects the INU1 Update
Page, see section 19.4.
~
~
:DTK-STS
lNUl control
- INSRT/ADV
HOLD=ON
33°56.1
~
~
N 118°24.7
- TEST
-TEST/HOLD
W
AUTO:
Indicates status of INU
and enables mode when
selected.
REMOTE=OFF
BRT
o
Figure 86 INU Integrated Navigation and Control Pages
122
16 May 1997
CPN: 988-4610-001, Rev A
USAF C-5 Version
FMS-BOO Software User's Manual
INU, GPS, and Integrated INU-GPS Navigation
19.3.3 GPS Display
The GPS INAV Page shows the present position
output from the GPS receiver, along with a "95%
error" figure of merit for the probable system
accuracy, given the current GPS satellite navigational
quality (satellite tracking state and geometry) as
shown in Figure 87. If "GPS/A/H" is indicated on the
title line, the FMS-800 is using airspeed and heading
sensor inputs to smooth the GPS data. This is
required to have a valid bank (roll) command output
to the flight director and autopilot.
The "MODE" indicates the current GPS receiver
tracking/aiding
mode:
"INIT",
"TEST",
"NAVIINU", or "NAVIPVI\'. If in the "NAVIINU"
mode, the GPS satellite tracking performance is
enhanced over the "NAV/PV/\' mode in the presence
of jamming and while maneuvering.
The "STATE" indicates the lowest tracking state 01
the four primary satellite tracking channels: "STATE
1" is acquisition, "STATE 3" is code track only (in
jamming) and "STATE 5" is code and carrier lock (no
jamming).
The number of satellites being tracked for primary
navigational purposes is also indicated; the normal
"fully determined" number is 4. Less than 4 may result
in GPS data invalidity.
Access the GPS Satellite
Data Page to view
information on the satellites currently being tracked
by the GPS receiver, including satellite vehicle
number, signal quality, and state.
95% probable
position error
Present GPS position
Current GPS
tracking/aiding
N42'00.432
W093"3
GPS/A/H inav
~
mode
~
95%ERR
0.2
~
MODE NAV /INU
DIFF lNU1/GPS
Selects GPS RAIM Page
run
O.02run
GPS receiver state
STATE
~
BRT
o
5
Difference from
"designated pilot's"
source
4 SATfr
-[
Number of GPS
satellites tracked
Figure 87 GPS Integrated Navigation Page
16 May 1997
CPN: 988-4610-001,
USAF C-5 Version
123
Rev A
FMS-800
Software User's Manual
INU, GPS, and Integrated
INU-GPS
Navigation
19.4 INU AND INTEGRATED NAVIGATIONAL POSITION UPDATES
To update the INUs or the INU-GPS navigational
solutions when GP$ data is unavailable, select the
"UPDATE" line select key on the respective INAV
Page (see Figure 88) to access the Update Page. Then
select the type of update desired using the left line
select key second from the top as shown. Tne three
types of updates are as follows:
1. MANUAL. Updates present position (on
line 1) to displayed checkpoint ("PT")
position on line 5.
2.
TACAN. Updates present position to the
manually entered bearing/slant
range
position.
3.
INUI/GPS, INU2/GPS, INUI, INU2, or GPS
(whichever is currently selected as the
"designated pilot's" steering solution).
Updates present position to the displayed
navigation solution position.
The Update Page can be accessed from:
INU1 INAV Page
INU2 INAV Page
INU3 INAV Page
INU1/--Page (GPS data unavailable)
INU2/- - - Page (GPS data unavailable)
Freezes displayed
position and difference
for update verification
prior to acceptance
Present INU1 position
Selects type of position
update:
1. MANUAL (overfly)
~
N4~OO.432 W09~34.432
~
tINUlt
update
:MANUAL
FREEZE*
UPDATE DIFF O.82nm
~
PT[N41029 W01~25J
2. TACAN
3. "Designated
pilot's" steering
solution
~
BRT
o
ACCEPT
REJECT
-[
The INU1 Update
Page with "MANUAL:'
selected as the
update type is shown
here as an example;
other examples are
shown in Figures 89
through 91.
Figure 88 Performing Navigational Position Updates
124
16 May 1997
CPN: 988-4610-001, Rev A
USAF C-5 Version
FMS-800 Software User's Manual
/NU, GPS, and Integrated INU-GPS Navigation
19.4.1 MANUAL Overfly Updates
To perform a manual overfly update, (1) toggle the left
line select key second from the top to "MANUAe' on
the Update
Page.
The "PT" coordinates
automatically default to the current active waypoint in
the flight plan. (2) If another checkpoint is desired,
enter
the
coordinates,
identifier,
or
identifierlbearingldistance checkpoint as the "PT", as
shown in Figure 89. To return to the active waypoint
default, enter a "-" at the "PT" line select key. (3)
Freeze the display to review the displayed update
difference ("DIFF") for reasonableness by pressing
the "FREEZE"
line select key. (4) Press the
"ACCEPT" line select key to accept the updated
position difference correction or the "REJECT" line
select key to reject it.
rn
Select "MANUAt.:'
for overfly updates
N4~OO.432 W09~34.432
update
t INUl t
:MANUAL
FREEZ
UPDATE DIFF 30.5nm
PT[N410 29 W093° 30]
[]J
Insert the
checkpoint position
(defaults to active
waypoint)
@
Freeze the position
and update difference
~
BRT
o
-[N42
0.432W09334.500]
[ZJ
Enter desired checkpoint
in the scratch pad
N4~00.432 W09~34.432
tINUlt
update
:MANUAL
FREEZE
UPDATE DIFF 0.82nm
ffiJ
Check the difference
display for
reasonableness
PT [N42° 00 W093° 34]
lID
ACCEPT
REJECT
-[
...or reject the update
Figure 89 Manual Overfly Position Update
16 May 1997
CPN: 988-4610-001,
USAF C-5 Version
125
Rev A
FMS-800 Software User's Manual
/NU, GPS, and Integrated
/NU-GPS
Navigation
19.4.2 TACAN Updates
TACAN updates provide the ability to update position
using radial bearing and slant range data from
TACAN or VORJDME equipment. Given the radial
bearing and slant range from the TACAN or
VOR/DME and the location of the Navaid station
from the ICAO identifier data base, the FMS can
compute the present position of the aircraft. This
computed position can be used to update the selected
navigational solution displayed on the Update Page.
To perform a TACAN update, the TACAN radio to be
used should first be tuned using an ICAO station
identifier and the station should be verified to be
correct.
On the Update Page (Figure 90),
(1) Toggle the left line select key second from the top
to "TACAN".
(2) Enter the TACAN bearing/slant range FROM the
indicated station as read from the HSI or TACAN
bearing indicator.
(3) "FREEZE" the position and update difference
("DIFF") displays, and verify reasonableness.
(4) "ACCEPT" or "REJECT" the difference for
update of the selected navigational solution.
Bearing/slant
tlNU1/---t
TACAN station
FREEZE
ORL/325/49.2
~
lZJ
BRG/RNG
[ORL/325/49.2]
update
N4~OO.432
W09~34.432
~
~
(JJ ~
O.82nm
range FROM the
-[
PDATE
DIFF
~
Figure 90 Update Page with TACAN as the Update Source
19.4.3
Updates to "Designated Pilot" Solution Position
To update the navigational solution to that of the
current "designated pilot's" steering solution (see
Figure 91),
(1) toggle the left line select key second from the top
to show the current solution;
(2) "FREEZE" the position and update difference
("DIFF") displays;
(3) verify the reasonableness of the difference
displayed;
(4) "ACCEPT" or "REJECT"
the difference
correction.
126
Note that if GPS data is not available and the pilot
desires to update all remaining valid navigational
solutions (INU1, INU2, INU3, INUlI---,
and
INU2/- - -) to the same position, the optimum
procedure is to first update the selected "designated
pilot" steering solution using a MANUAL, or TACAN
update, then update the others individually to that
solution.
Then, all will be exactly the same
immediately thereafter.
16 May 1997
CPN: 988-4610-001,
Rev A
USAF C-5 Version
FMS-800 Software User's Manual
/NU, GPS, and Integrated
,.,
UPDATE
DIFF
t
INU1/---t
-[
] ~
FREEZ~
update
:INU1/GPS
PSN
W015°25
N4~OO.432
W09~34.432
~N41029
O.82nm ~
INU-GPS
Navigation
~
~
"Designated pilot's"
solution present position
Figure 91 Update Page with "Designated Pilot" as the Update Source
16 May 1997
CPN: 988-4610-001,
USAF C-5 Version
127
Rev A
FMS-800 Software User's Manual
/NU, GPS, and Integrated INU-GPS
Navigation
19.5 ACTIVE GPS AND AIDING CONFIGURATION
Kalman filter INU corrections, through the navigation
configuration (NAV CONFIG) page, access as shown
in Figure 92.
The crew may control which of the two available GPS
receivers is used for active navigation calculations and
t [
I-~l
index 1
GPS
NAV CONFIG
""-1
t"'-I
'·--1
POWER
TIMERS
TEST ]
SA/AS
LOCK/ZERO
DATA
LOADER
"4-1
START
~
1 •••••••
1
1-'·'
[2.0]XTK ALERT
n3.V
1--"
1-'"
I-··l
[120] WPT ALERT
PILOT designated
ACTIVE: GPSl
BANK[25]O
:INU1
o
BP.T
Figure
92 Navigation
GPSAID
ADC2:
]
[
Configuration
Normally, GPSI should be selected as the Active GPS.
Whichever
one is selected, the other one will be
automatically used as a monitor of the active GPS. If
the difference
in positions between the two GPS
solutions exceeds the integrity limit for the current
phase of flight, a "COMPARE GPS" annunciation will
be given. If GPSI fails, GPS2 may be selected as the
128
SPD[15]
<::onfig
Page Access and Usage
active one.
Also on the NAV CONFIG page, the crew may select
the INU to be used for velocity aiding of the GPS
receivers, and the air data source to be used for
altitude aiding. Normally these should be set to INUI
and ADCl respectively.
16 May 1997
CPN: 988-4610-001,
Rev A
USAF C-S Version
1--'1
FMS-BOO Software User's Manual
INU, GPS, and Integrated INU-GPS Navigation
19.6 GPS SATELLITE DATAAND RECEIVER
AUTONOMOUS INTEGRITY
MONITORING (RAIM)
The FMS-800 provides the crew access to pages
displaying the individual channel/satellite tracking
status for each GPS receiver and the RAIM
control/predictive RAIM for the active GPS receiver.
These pages are accessed by selecting the related line
key on the GPS INAV page as shown in Figure 93.
To request the availability of approach RAIM at a
destination airport, first enter the identifier of the
airport in the top line of the RAIMIPREDICfION
page. Then enter the expected time of arrival (ETA)
in UTe. After performing the prediction calculation,
the FMS-800 will display the availability of approach
RAIM on the page information line. This availability
applies to a period from 15 minutes prior to the
entered ETA until 15 minutes after the ETA.
The FMS-800 provides an active RAIM solution at
present position.
By tracking GPS satellite
-.-
1"'-1
~---I
f·-I
,---I
I-~·I
I-~I1--.1 1"'-1
I-~I
+
state -of- health and orbital geometry, the FMS -800
is capable of determining when the GPS navigation
solution is degraded or suspect due to satellite
failures. If the GPS receiver is unable to provide a
RAIM solution due to satellite tracking problems or
problems with the satellite constellation geometry, a
NO RAIM annunciation and external RAIM alert will
be provided to inform the crew of the absence of
RAIM protection. During a NO RAIM period, the
GPS navigation solution may be acceptable but the
integrity of that solution will be indeterminate.
During normal GPS navigation with an active RAIM
solution, if the GPS receiver determines that there is
an inconsistency in the GPS navigation solution, a
RAIM WARN annunciation and external RAIM alert
will be provided to inform the crew of a degraded GPS
navigation solution.
When a RAIM WARN is
provided, the crew should immediately select a
non-GPS based navigation solution on the Lateral
Steer page (see Figure 82) until the integrity of the
GPS navigation solution is restored.
0
~-.-l
,
1+-1
~-·-I
1-.•-1
APPR
~PS/A/H
BRT inav
MODE
NAV/lNU
[[
5D
5D
lS
3I
RAIM
AVAILl\BLE
RAIM
5
24
15
11
01
1P
2C
2P data
1P
1P
41
41
41
SATS
satellite
41-[
30
] ] ] - ] RTN
4 3D
SATS
[1212]ETA
[CID
1-·-1
UTC
RTN-STATE
~ RAIM:ON
1---1
1'4-1
C/N
N4P29.329
W015 25 ~183
1--.1
RAIM/prediction
Figure 93 GPS Satellite Data and RAIM Pages
16 May 1997
CPN: 988-4610-001,
USAF C-5 Version
129
Rev A
FMS-BOO Software User's Manual
INU, GPS, and Integrated INU-GPS Navigation
This page intentionally left blank.
130
16 May 1997
CPN: 988-4610-001,
Rev A
USAF C-S Version