1
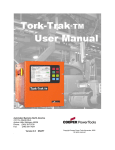
Chapter 2 APPLICATION PACKAGE MOTION Control connections for point-to-point positioning X5 1 + 10 V 2 - 10 V Supply voltage analog output max. 20 m 3 ISA0- 4 ISA0+ Neg. HW limit switch 5 ISA1 6 GND_ISA1 7 + 24 V 8 + 24 V 9 IS00 10 IS01 11 ENPO Release power stage 12 OS00 Ready 13 OS01 Standstill 14 DGND Digital ground 15 24V_EXT 16 GND_EXT 17 GND_EXT Feed release 3 NC Manual/automatic Pos. HW limit switch 1 1 2 1 2 , 18 OS03 19 OS02/3 20 OS02/4 24 V 10 %, 35 AA 24 V ±+10%, GND , , Relay output of holding brake +24V 1 M 3~ X13 13 25 4 22 9 4 +24V 21 8 20 7 GND 19 6 18 5 17 4 16 3 15 2 14 1 À Á Â OE03 OE02 OE01 OE00 24V-OUT GND-OUT +24V 3 DGND n.c. GND-IN IE07 IE06 IE05 IE04 IE03 IE02 IE01 IE00 Output: No tracking error Output: reference point defined Output: axis in position Output: axis in position 0 (reference point) 24 V supply for outputs OE00 ... 03 Ground for outputs OE00 ... 03 Ground for inputs IE00 ... 07 Input p3 Input p2 Input p1 Input p0 Input: jogInput: jog+ Input: start release Input: reference cam Earth all screens at both ends to the casing over a large surface area using cable clamps! Only use the control voltage connection for version SN2 (external supply of the control unit)! The internal 24 V of the servocontroller is used to supply inputs and outputs at X5 (max. loading capacity: 200 mA in total). Issue: January 1999 2-17