1
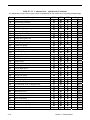
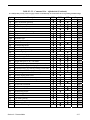
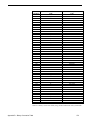
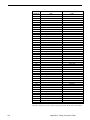
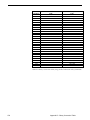
Parameter Kp Kd Ki Vff Aff Function Determines stiffness of servo loop. Main damping factor, used to eliminate oscillation Value Set Too Low Servo loop too soft with high following errors Uncompensated oscillation caused by other parameters being high Reduces following error during long motions and at stop Reduces following error during the constant velocity phase of a motion Stage does not reach or stay at the desired stop position Negative following error during the constant velocity phase of a motion. Stage lags the desired trajectory. Negative following error during the acceleration phase of a motion. Stage lags the desired trajectory. Reduces following error during the acceleration and deceleration phases of a motion Value Set Too High Servo loop too tight and/or causing oscillation Higher-frequency oscillation and/or audible noise in the motor caused by large ripple in the motor voltage Oscillations at lower frequency and higher amplitude Positive following error during the constant velocity phase of a motion. Stage is ahead of the desired trajectory. Position following error during the acceleration phase of a motion. Stage is ahead of the desired trajectory. Table 6.1: Servo Parameter Functions Section 6 – Servo Tuning 6-5