1
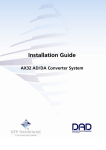
SPEED-Commander Frequency Controller Operating Instructions Software version 5.1.7a Caution: Special Software Program no. 05 Forward one way positioning Parameter list and connection of control terminals in accordance with enclosed program description • All other points accordance with enclosed standard operational instructions • SPEED TECH A/S Nybrovej 97. DK2820 Gentofte. Telefon: +45 45938545 Fax: +45 45938544 www.speed-tech.dk - [email protected] Forward one way positioning Please refer to SPEED COMMANDER VECTOR standard operating instructions for assembly, installation and for parameter setting. Description: Forward one way positioning are used for assignments were the motor must go a certain distance and stop in a fixed position. There must be a reset for every cycle to correct inaccuracy, this can be done with a photo sensor or switch. It is possible to select a second set of parameter values for distance, speed, acceleration, deceleration and position step Following parameters are used for second parameter set: 2*,3*,4*,5* and 8*. It is activated by applying a +10V/24 signal to terminal 5. Function: 1. Continuous distance where the reference signal is only used at first run. Set Par. 7* (Second set 8*) = 0 (Reference signal not used while running) (Fig. A). 2. Continuous distance with reference at each step. And the reference switch controls the no of position step.(Fig. B) 3. As no 2 but with different distance between positions e.g. package on a conveyer belt. (Fig. C). Connection: The power supply and the motor are connected in accordance with the standard terminal connection diagram and the control terminals in accordance with the wiring diagram below. Do not connect terminals 6 and 7 at first so that the drive doesn’t start by itself when the power supply is connected. Then power up the Speed Commander and do the parameter setting. Then connect the wires at terminal 6+7 and then it is ready for normal operation. Please note: If you do not use a potentiometer to control frequency, place a connection between terminal 3 and 1. Start-up: After powering up must the motor and counter direction be controlled. Do this in TIP mode by applying signal to terminal 6 (reveres) or 7 (forwards). If the motor runs in the wrong direction, switch over two of the motor wires. If the counter direction is wrong switch over the encoder signal A/B. TIP mode: Set the Speed Commander in off mode (No signal at terminal 6+7) then press the STEP/STORE button and keep it pressed. Then use the ▲ (forward) or ▼(reveres) button to run with the motor. Reference run: At every power up is a reference run required so that the controller knows where it is. The first start command initialise a reference run against the reference point. If the signal at the input terminal 8 (reference input) is 0 will the motor run forward until the reference switch is activated (+10V or +24V at terminal 8). If the reference switch is activated when the reference run is initiated is the reference run skipped and the controller is ready to operate in normal mode. Reference run is performed with TIP frequency (Par. C). Please note: Parameter A* (Reference function) If A* = 0 is the reference switch only used normal mode. If A*= 1 is the reference switch also used in OFF mode under reference run. Positioning: This type of position is recommended for one way positioning with or without reference correction at every cycle. The position length is set up in par 1* and 2*. To use position length 2* apply a +10V signal at terminal 5 First time a “Go to position” command is received after power up the system would perform a reference run to find the zero position (reference switch). A “go to position command is initiated by activating terminal 6 and 7 at the same time for 50mS.The reference run is done with the frequency set up in par. C. After the reference run the motor would go the position length the number times set up in par. 7* (8*). The system would stop if a reference position isn’t found before 2 times the position length. This safety function can be aborted by activating terminal 2, this can also be used if there are different distance between the object on the conveyer belt or as a emptying function. If par. 7* (8*) is set to 0, will the system only do a reference run first time after power up. But the position length would be corrected every time a new start is received. When activating TIP inputs the motor would go forward or reveres with the frequency set up in par. C. Analogue control of speed: It is possible to control the motor frequency between Par. 1 and 2 with a analogue signal at terminal 3 (0-10V). Note: If this function is not used connect terminal 3 to 1 (+10V). Then the motor will run with the speed set up in par. 1. Version 5.17a -2- Rights to changes reserved Forward one way positioning Photo sensor or equal for reference At first run 400 pos A: No. of position is continuous. Only ref. At start up Fault in position will be corrected at next run. (If a run is 399 because of position tolerance the next run will be 401 positions) Parameter 1* = 400 Parameter 7* = 0 B: As A but with reference at every run. Distance is continuous. Parameter 1* = 380 Parameter 7* = 1 If a reference signal isn’t present before 2 times the length of the position the motor will stop. 380 Pos. 418,5 Pos. Different distance between objects 250 Pos Photo sensor or equal for reference C: With reference signal at every run. Different distance between objects. Parameter 1* = 250 Parameter 7* = 1 Terminal 2 must be activated (+10 or +24Volts - Empty belt function) Version 5.17a -3- Rights to changes reserved Forward one way positioning Parameter list Par- Function No. 1* Position length Value range: Default: Description: 2* 1 2 3 4 5 6 7 8 9 A b C d E F Position length 2 1. max. frequency Min. Frequency 1. Acceleration Deceleration V/F – curve Boost DC – Brake current DC – Brake time Start frequency Stop frequency Current limit TIP - frequency Switch frequency Auto recovery Display readout 0 - 999.999 0,0 - 400 Hz 0,0 - 400 Hz 0,1 - 999 Hz/s 0,1 - 999 Hz/s 24,5 - 400 Hz 0,0 - 25% 0,0 - 25% 0,0 -120 s 0 - 20.0 Hz 0 - 20.0 Hz 50 - 150% 0 - 400 Hz 2,0 - 8,0 KHz 0-4 0 - 200 G H Scale factor Relay function 0,001 - 1000, 0 - 99 J NPN output 0 - 120 L P U y 3* 4* 6* 7* Motor revolutions./min. 0 - 3.000 Impulses pr. rotation. 1 - 1000 Position tolerance 0 - 999 Position hysteresis 1 - 999 Second par. 1 0-400Hz Second par. 3 0,1 - 999Hz pr. second Second par. 4 0,1 - 999Hz pr. second Second par. U 0 - 999 No of positioning step 0 - 999.999 8* 9* Second par. 7* Overrun 0 - 999.999 0 - 999.999 1 0 A* Reset function 0-1 0 X Not flashing 5* 0 - 999.999 1000 Position length no. 1 No. Of positions after reference position 2000 Position length no. 2 (Used when signal at terminal 5) 50,0 Hz Max. frequency no. 1 0,1 Hz Min. start frequency 15,0 Hz/s Acceleration no. 1 15,0 Hz/s See standard operating instructions 50,0 Hz See standard operating instructions – Frequency cross point See standard operating instructions 5,0 % See standard operating instructions 5,0 % See standard operating instructions 0,1 s See standard operating instructions 0 Hz See standard operating instructions 0 Hz See standard operating instructions 150% 10 Hz Motor frequency when running in TIP and reference m mode 2,5 KHz See standard operating instructions See standard operating instructions 0 30 30 - 33: Position / See standard operating instructions Example: 12.406 30: Showing the first 3 digits: 12.4 31: Scrolling display:12.406 = 12. 12.4 2.40 406 32: Showing the last 3 digits: 406 33: Showing thousands: 012. Note: Scale factor par. G has affect on the position readout. 1,000 Scale for readout and setting of par. 1*, 2* and 9* See standard operating instructions 82 82 / 83 – activated / not activated in position after reference signal. See standard operating instructions 82 82 / 83 – activated / not activated in position after reference signal. 1.350 At 50 Hz ( see motor spec ). Scrolling readout when n>1000 50 Set encoder pulses pr. rev. (MIG 1 pulse = 4 positions ) See standard operating instructions 3 See standard operating instructions 3 50,0 Hz Max. frequency no. 2 (Used when signal at terminal 5) 15,0 Hz/s Acceleration no. 2 (Used when signal at terminal 5) 15,0 Hz/s Deceleration no. 2 (Used when signal at terminal 5) 3 1 Positions tolerance no. 2(Used when signal at terminal 5) No of times that position length is carried out. (If = 0 reference is only done at start up) As 7* (Used when signal at terminal 5) Motor will go no. of positions set up in this par further when positions is reached and then return. (To correct mechanical slip in systems) 0 = Normal / 1 = Possible to reset in OFF mode too ( At ref. run) X* Flashing Version 5.17a -4- Rights to changes reserved Forward one way positioning Connections: Internal control power 10V DC NC Relay Max load 1A / 230 VAC COM 4 - lead NO 0V Channel B Channel A +10 VDC 6 - lead Blue White Black Yellow White Green Brown Brown Encoder E.g. MIG type as terminal 1 NPN-output Reference Function of terminal 6 and 7. Function Ter. 6 Ter. 7 OFF 0 0 TIP – fwd 1 0 TIP – rev 0 1 Positioning 1 1 Reference input On/Off – TIP forward On/Off – TIP reverse PTC TIP - fwd T * OFF TIP - rev Par. Set 1 or 2 Second parameter set 0V 0 – 10 Volt Cont. Of speed Choice of parameter set 10 V = max. frequency Empty belt function +10VDC Function max. 80mA Parameter set 1 Parameter set 2 Terminal 5 0 1 External control power 24V DC NC Relay Max load 1A (AC1) 230VAC COM 4 - lead 6 - lead NO Blue White Black Yellow White Green Brown Brown 0V Encoder E.g. MIG type Channel B Channel A +10 VDC as terminal 1 NPN-output Reference Reference input On/Off – TIP forward On/Off – TIP reverse TIP - fwd T OFF TIP - rev Par. Set 1 or 2 Second parameter set 0V Cont. Of speed 0 – 10 Volt 10 V = max. frequency 24 VDC (stabilized) + Empty belt function +10VDC - max. 80mA Function of terminal 6 and Signal Klemme 7. Funktion 6 7 FunctionSTOP Ter. 60 Ter. 0 7 OFF 0 TIP 0 10 TIP – fwd 1 0 TIP - bak 1 0 TIP – rev 0 1 Position 1 1 11 Positioning Choice of parameter set Funktion T = Thermo switch Parameter set 1 Parameter set 2 Terminal 5 0 1 Version 5.17a -5- Rights to changes reserved