1
MITSUBISHI ELECTRIC
Motion Controllers
Programming Manual
SV13/SV22 (REAL MODE)
Q173DCPU
Q172DCPU
01 01 2008
IB(NA)-0300136
Version A
MITSUBISHI ELECTRIC
INDUSTRIAL AUTOMATION
SAFETY PRECAUTIONS
(Please read these instructions before using this equipment.)
Before using this product, please read this manual and the relevant manuals introduced in this manual
carefully and pay full attention to safety to handle the product correctly.
These precautions apply only to this product. Refer to the Q173DCPU/Q172DCPU Users manual for a
description of the Motion controller safety precautions.
In this manual, the safety instructions are ranked as "DANGER" and "CAUTION".
DANGER
Indicates that incorrect handling may cause hazardous
conditions, resulting in death or severe injury.
CAUTION
Indicates that incorrect handling may cause hazardous
conditions, resulting in medium or slight personal injury or
physical damage.
CAUTION may also be linked to serious
Depending on circumstances, procedures indicated by
results.
In any case, it is important to follow the directions for usage.
Please save this manual to make it accessible when required and always forward it to the end user.
A-1
For Safe Operations
1. Prevention of electric shocks
DANGER
Never open the front case or terminal covers while the power is ON or the unit is running, as this
may lead to electric shocks.
Never run the unit with the front case or terminal cover removed. The high voltage terminal and
charged sections will be exposed and may lead to electric shocks.
Never open the front case or terminal cover at times other than wiring work or periodic
inspections even if the power is OFF. The insides of the Motion controller and servo amplifier are
charged and may lead to electric shocks.
Completely turn off the externally supplied power used in the system before mounting or removing the
module, performing wiring work, or inspections. Failing to do so may lead to electric shocks.
When performing wiring work or inspections, turn the power OFF, wait at least ten minutes, and
then check the voltage with a tester, etc.. Failing to do so may lead to electric shocks.
Be sure to ground the Motion controller, servo amplifier and servomotor. (Ground resistance :
100 or less) Do not ground commonly with other devices.
The wiring work and inspections must be done by a qualified technician.
Wire the units after installing the Motion controller, servo amplifier and servomotor. Failing to do
so may lead to electric shocks or damage.
Never operate the switches with wet hands, as this may lead to electric shocks.
Do not damage, apply excessive stress, place heavy things on or sandwich the cables, as this
may lead to electric shocks.
Do not touch the Motion controller, servo amplifier or servomotor terminal blocks while the power
is ON, as this may lead to electric shocks.
Do not touch the built-in power supply, built-in grounding or signal wires of the Motion controller
and servo amplifier, as this may lead to electric shocks.
2. For fire prevention
CAUTION
Install the Motion controller, servo amplifier, servomotor and regenerative resistor on
incombustible. Installing them directly or close to combustibles will lead to fire.
If a fault occurs in the Motion controller or servo amplifier, shut the power OFF at the servo
amplifier’s power source. If a large current continues to flow, fire may occur.
When using a regenerative resistor, shut the power OFF with an error signal. The regenerative
resistor may abnormally overheat due to a fault in the regenerative transistor, etc., and may lead
to fire.
Always take heat measures such as flame proofing for the inside of the control panel where the
servo amplifier or regenerative resistor is installed and for the wires used. Failing to do so may
lead to fire.
Do not damage, apply excessive stress, place heavy things on or sandwich the cables, as this may
lead to fire.
A-2
3. For injury prevention
CAUTION
Do not apply a voltage other than that specified in the instruction manual on any terminal.
Doing so may lead to destruction or damage.
Do not mistake the terminal connections, as this may lead to destruction or damage.
Do not mistake the polarity ( + / - ), as this may lead to destruction or damage.
Do not touch the heat radiating fins of controller or servo amplifier, regenerative resistor and
servomotor, etc., while the power is ON and for a short time after the power is turned OFF. In this
timing, these parts become very hot and may lead to burns.
Always turn the power OFF before touching the servomotor shaft or coupled machines, as these
parts may lead to injuries.
Do not go near the machine during test operations or during operations such as teaching.
Doing so may lead to injuries.
4. Various precautions
Strictly observe the following precautions.
Mistaken handling of the unit may lead to faults, injuries or electric shocks.
(1) System structure
CAUTION
Always install a leakage breaker on the Motion controller and servo amplifier power source.
If installation of an electromagnetic contactor for power shut off during an error, etc., is specified in
the instruction manual for the servo amplifier, etc., always install the electromagnetic contactor.
Install the emergency stop circuit externally so that the operation can be stopped immediately and
the power shut off.
Use the Motion controller, servo amplifier, servomotor and regenerative resistor with the correct
combinations listed in the instruction manual. Other combinations may lead to fire or faults.
Use the CPU module, base unit and motion module with the correct combinations listed in the
instruction manual. Other combinations may lead to faults.
If safety standards (ex., robot safety rules, etc.,) apply to the system using the Motion controller,
servo amplifier and servomotor, make sure that the safety standards are satisfied.
Construct a safety circuit externally of the Motion controller or servo amplifier if the abnormal
operation of the Motion controller or servo amplifier differ from the safety directive operation in the
system.
In systems where coasting of the servomotor will be a problem during the forced stop, emergency
stop, servo OFF or power supply OFF, use dynamic brakes.
Make sure that the system considers the coasting amount even when using dynamic brakes.
In systems where perpendicular shaft dropping may be a problem during the forced stop,
emergency stop, servo OFF or power supply OFF, use both dynamic brakes and electromagnetic
brakes.
A-3
CAUTION
The dynamic brakes must be used only on errors that cause the forced stop, emergency stop, or
servo OFF. These brakes must not be used for normal braking.
The brakes (electromagnetic brakes) assembled into the servomotor are for holding applications,
and must not be used for normal braking.
The system must have a mechanical allowance so that the machine itself can stop even if the
stroke limits switch is passed through at the max. speed.
Use wires and cables that have a wire diameter, heat resistance and bending resistance
compatible with the system.
Use wires and cables within the length of the range described in the instruction manual.
The ratings and characteristics of the parts (other than Motion controller, servo amplifier and
servomotor) used in a system must be compatible with the Motion controller, servo amplifier and
servomotor.
Install a cover on the shaft so that the rotary parts of the servomotor are not touched during
operation.
There may be some cases where holding by the electromagnetic brakes is not possible due to the
life or mechanical structure (when the ball screw and servomotor are connected with a timing belt,
etc.). Install a stopping device to ensure safety on the machine side.
(2) Parameter settings and programming
CAUTION
Set the parameter values to those that are compatible with the Motion controller, servo amplifier,
servomotor and regenerative resistor model and the system application. The protective functions
may not function if the settings are incorrect.
The regenerative resistor model and capacity parameters must be set to values that conform to
the operation mode, servo amplifier and servo power supply module. The protective functions
may not function if the settings are incorrect.
Set the mechanical brake output and dynamic brake output validity parameters to values that are
compatible with the system application. The protective functions may not function if the settings
are incorrect.
Set the stroke limit input validity parameter to a value that is compatible with the system
application. The protective functions may not function if the setting is incorrect.
Set the servomotor encoder type (increment, absolute position type, etc.) parameter to a value
that is compatible with the system application. The protective functions may not function if the
setting is incorrect.
Set the servomotor capacity and type (standard, low-inertia, flat, etc.) parameter to values that
are compatible with the system application. The protective functions may not function if the
settings are incorrect.
Set the servo amplifier capacity and type parameters to values that are compatible with the
system application. The protective functions may not function if the settings are incorrect.
A-4
CAUTION
Use the program commands for the program with the conditions specified in the instruction
manual.
Set the sequence function program capacity setting, device capacity, latch validity range, I/O
assignment setting, and validity of continuous operation during error detection to values that are
compatible with the system application. The protective functions may not function if the settings
are incorrect.
Some devices used in the program have fixed applications, so use these with the conditions
specified in the instruction manual.
The input devices and data registers assigned to the link will hold the data previous to when
communication is terminated by an error, etc. Thus, an error correspondence interlock program
specified in the instruction manual must be used.
Use the interlock program specified in the intelligent function module's instruction manual for the
program corresponding to the intelligent function module.
(3) Transportation and installation
CAUTION
Transport the product with the correct method according to the mass.
Use the servomotor suspension bolts only for the transportation of the servomotor. Do not
transport the servomotor with machine installed on it.
Do not stack products past the limit.
When transporting the Motion controller or servo amplifier, never hold the connected wires or
cables.
When transporting the servomotor, never hold the cables, shaft or detector.
When transporting the Motion controller or servo amplifier, never hold the front case as it may fall
off.
When transporting, installing or removing the Motion controller or servo amplifier, never hold the
edges.
Install the unit according to the instruction manual in a place where the mass can be withstood.
Do not get on or place heavy objects on the product.
Always observe the installation direction.
Keep the designated clearance between the Motion controller or servo amplifier and control panel
inner surface or the Motion controller and servo amplifier, Motion controller or servo amplifier and
other devices.
Do not install or operate Motion controller, servo amplifiers or servomotors that are damaged or
that have missing parts.
Do not block the intake/outtake ports of the Motion controller, servo amplifier and servomotor with
cooling fan.
Do not allow conductive matter such as screw or cutting chips or combustible matter such as oil
enter the Motion controller, servo amplifier or servomotor.
A-5
CAUTION
The Motion controller, servo amplifier and servomotor are precision machines, so do not drop or
apply strong impacts on them.
Securely fix the Motion controller, servo amplifier and servomotor to the machine according to
the instruction manual. If the fixing is insufficient, these may come off during operation.
Always install the servomotor with reduction gears in the designated direction. Failing to do so
may lead to oil leaks.
Store and use the unit in the following environmental conditions.
Environment
Ambient
temperature
Ambient humidity
Storage
temperature
Atmosphere
Altitude
Vibration
Conditions
Motion controller/Servo amplifier
According to each instruction manual.
According to each instruction manual.
According to each instruction manual.
Servomotor
0°C to +40°C (With no freezing)
(32°F to +104°F)
80% RH or less
(With no dew condensation)
-20°C to +65°C
(-4°F to +149°F)
Indoors (where not subject to direct sunlight).
No corrosive gases, flammable gases, oil mist or dust must exist
1000m (3280.84ft.) or less above sea level
According to each instruction manual
When coupling with the synchronous encoder or servomotor shaft end, do not apply impact such
as by hitting with a hammer. Doing so may lead to detector damage.
Do not apply a load larger than the tolerable load onto the synchronous encoder and servomotor
shaft. Doing so may lead to shaft breakage.
When not using the module for a long time, disconnect the power line from the Motion controller
or servo amplifier.
Place the Motion controller and servo amplifier in static electricity preventing vinyl bags and store.
When storing for a long time, please contact with our sales representative.
Also, execute a trial operation.
A-6
(4) Wiring
CAUTION
Correctly and securely wire the wires. Reconfirm the connections for mistakes and the terminal
screws for tightness after wiring. Failing to do so may lead to run away of the servomotor.
After wiring, install the protective covers such as the terminal covers to the original positions.
Do not install a phase advancing capacitor, surge absorber or radio noise filter (option FR-BIF)
on the output side of the servo amplifier.
Correctly connect the output side (terminal U, V, W). Incorrect connections will lead the
servomotor to operate abnormally.
Do not connect a commercial power supply to the servomotor, as this may lead to trouble.
Do not mistake the direction of the surge absorbing diode
Servo amplifier
installed on the DC relay for the control signal output of brake
VIN
signals, etc. Incorrect installation may lead to signals not being
(24VDC)
output when trouble occurs or the protective functions not
functioning.
Control output
RA
signal
Do not connect or disconnect the connection cables between
each unit, the encoder cable or PLC expansion cable while the
power is ON.
Securely tighten the cable connector fixing screws and fixing mechanisms. Insufficient fixing may
lead to the cables combing off during operation.
Do not bundle the power line or cables.
(5) Trial operation and adjustment
CAUTION
Confirm and adjust the program and each parameter before operation. Unpredictable
movements may occur depending on the machine.
Extreme adjustments and changes may lead to unstable operation, so never make them.
When using the absolute position system function, on starting up, and when the Motion
controller or absolute value motor has been replaced, always perform a home position return.
A-7
(6) Usage methods
CAUTION
Immediately turn OFF the power if smoke, abnormal sounds or odors are emitted from the Motion
controller, servo amplifier or servomotor.
Always execute a test operation before starting actual operations after the program or
parameters have been changed or after maintenance and inspection.
Do not attempt to disassemble and repair the units excluding a qualified technician whom our
company recognized.
Do not make any modifications to the unit.
Keep the effect or electromagnetic obstacles to a minimum by installing a noise filter or by using
wire shields, etc. Electromagnetic obstacles may affect the electronic devices used near the
Motion controller or servo amplifier.
When using the CE Mark-compliant equipment, refer to the "EMC Installation Guidelines" (data
number IB(NA)-67339) for the Motion controllers and refer to the corresponding EMC guideline
information for the servo amplifiers, inverters and other equipment.
Use the units with the following conditions.
Item
Conditions
Q61P-A1
100 to 120VAC
Q61P-A2
+10%
-15%
200 to 240VAC
Q61P
+10%
-15%
Q62P
100 to 240VAC
+10%
-15%
Q63P
24VDC
Q64P
+30%
-35%
100 to 120VAC
200 to 240VAC
Input power
(85 to 132VAC)
(170 to 264VAC)
(85 to 264VAC)
Input frequency
50/60Hz ±5%
Tolerable
momentary
power failure
20ms or less
A-8
(15.6 to 31.2VDC)
+10%
-15%
+10%
-15%
(85 to 132VAC/
170 to 264VAC)
/
(7) Corrective actions for errors
CAUTION
If an error occurs in the self diagnosis of the Motion controller or servo amplifier, confirm the
check details according to the instruction manual, and restore the operation.
If a dangerous state is predicted in case of a power failure or product failure, use a servomotor
with electromagnetic brakes or install a brake mechanism externally.
Use a double circuit construction so that the electromagnetic brake operation circuit can be
operated by emergency stop signals set externally.
Shut off with the
emergency stop
signal(EMG).
Shut off with servo ON signal OFF,
alarm, electromagnetic brake signal.
Servomotor
RA1
EMG
Electromagnetic
brakes
24VDC
If an error occurs, remove the cause, secure the safety and then resume operation after alarm
release.
The unit may suddenly resume operation after a power failure is restored, so do not go near the
machine. (Design the machine so that personal safety can be ensured even if the machine
restarts suddenly.)
(8) Maintenance, inspection and part replacement
CAUTION
Perform the daily and periodic inspections according to the instruction manual.
Perform maintenance and inspection after backing up the program and parameters for the Motion
controller and servo amplifier.
Do not place fingers or hands in the clearance when opening or closing any opening.
Periodically replace consumable parts such as batteries according to the instruction manual.
Do not touch the lead sections such as ICs or the connector contacts.
Before touching the module, always touch grounded metal, etc. to discharge static electricity from
human body. Failure to do so may cause the module to fail or malfunction.
Do not directly touch the module's conductive parts and electronic components.
Touching them could cause an operation failure or give damage to the module.
Do not place the Motion controller or servo amplifier on metal that may cause a power leakage
or wood, plastic or vinyl that may cause static electricity buildup.
Do not perform a megger test (insulation resistance measurement) during inspection.
A-9
CAUTION
When replacing the Motion controller or servo amplifier, always set the new module settings
correctly.
When the Motion controller or absolute value motor has been replaced, carry out a home position
return operation using one of the following methods, otherwise position displacement could occur.
1) After writing the servo data to the Motion controller using programming software, switch on the
power again, then perform a home position return operation.
2) Using the backup function of the programming software, load the data backed up before
replacement.
After maintenance and inspections are completed, confirm that the position detection of the
absolute position detector function is correct.
Do not drop or impact the battery installed to the module.
Doing so may damage the battery, causing battery liquid to leak in the battery. Do not use the
dropped or impacted battery, but dispose of it.
Do not short circuit, charge, overheat, incinerate or disassemble the batteries.
The electrolytic capacitor will generate gas during a fault, so do not place your face near the
Motion controller or servo amplifier.
The electrolytic capacitor and fan will deteriorate. Periodically replace these to prevent secondary
damage from faults. Replacements can be made by our sales representative.
(9) About processing of waste
When you discard Motion controller, servo amplifier, a battery (primary battery) and other option articles,
please follow the law of each country (area).
CAUTION
This product is not designed or manufactured to be used in equipment or systems in situations
that can affect or endanger human life.
When considering this product for operation in special applications such as machinery or systems
used in passenger transportation, medical, aerospace, atomic power, electric power, or
submarine repeating applications, please contact your nearest Mitsubishi sales representative.
Although this product was manufactured under conditions of strict quality control, you are strongly
advised to install safety devices to forestall serious accidents when it is used in facilities where a
breakdown in the product is likely to cause a serious accident.
(10) General cautions
CAUTION
All drawings provided in the instruction manual show the state with the covers and safety
partitions removed to explain detailed sections. When operating the product, always return the
covers and partitions to the designated positions, and operate according to the instruction manual.
A - 10
REVISIONS
The manual number is given on the bottom left of the back cover.
Print Date
Jan., 2008
Manual Number
IB(NA)-0300136-A First edition
Revision
Japanese Manual Number IB(NA)-0300128
This manual confers no industrial property rights or any rights of any other kind, nor does it confer any patent
licenses. Mitsubishi Electric Corporation cannot be held responsible for any problems involving industrial property
rights which may occur as a result of using the contents noted in this manual.
© 2008 MITSUBISHI ELECTRIC CORPORATION
A - 11
INTRODUCTION
Thank you for choosing the Mitsubishi Motion controller Q173DCPU/Q172DCPU.
Before using the equipment, please read this manual carefully to develop full familiarity with the functions
and performance of the Motion controller you have purchased, so as to ensure correct use.
CONTENTS
Safety Precautions .........................................................................................................................................A- 1
Revisions ........................................................................................................................................................A-11
Contents .........................................................................................................................................................A-12
About Manuals ...............................................................................................................................................A-15
1. OVERVIEW
1- 1 to 1- 4
1.1 Overview................................................................................................................................................... 1- 1
1.2 Features ................................................................................................................................................... 1- 3
1.2.1 Performance Specifications .............................................................................................................. 1- 3
2. POSITIONING CONTROL BY THE MOTION CPU
2- 1 to 2-14
2.1 Positioning Control by the Motion CPU................................................................................................... 2- 1
3. POSITIONING DEDICATED SIGNALS
3- 1 to 3-64
3.1 Internal Relays ......................................................................................................................................... 3- 3
3.1.1 Axis statuses ..................................................................................................................................... 3-10
3.1.2 Axis command signals ...................................................................................................................... 3-20
3.1.3 Common devices .............................................................................................................................. 3-27
3.2 Data Registers.......................................................................................................................................... 3-40
3.2.1 Axis monitor devices ......................................................................................................................... 3-44
3.2.2 Control change registers................................................................................................................... 3-50
3.2.3 Common devices .............................................................................................................................. 3-51
3.3 Motion Registers(#).................................................................................................................................. 3-54
3.4 Special Relays (SM) ................................................................................................................................ 3-56
3.5 Special Registers (SD)............................................................................................................................. 3-59
4. PARAMETERS FOR POSITIONING CONTROL
4- 1 to 4-14
4.1 System Settings ....................................................................................................................................... 4- 1
4.2 Fixed Parameters..................................................................................................................................... 4- 2
4.2.1 Number of pulses/travel value per rotation....................................................................................... 4- 3
4.2.2 Backlash compensation amount....................................................................................................... 4- 5
4.2.3 Upper/lower stroke limit value........................................................................................................... 4- 5
4.2.4 Command in-position range.............................................................................................................. 4- 7
4.2.5 Speed control 10 multiplier setting for degree axis ........................................................................ 4- 8
4.3 Parameter Block....................................................................................................................................... 4-11
4.3.1 Relationships between the speed limit value, acceleration time, deceleration time and rapid stop
deceleration time............................................................................................................................... 4-13
4.3.2 S-curve ratio ...................................................................................................................................... 4-13
A - 12
4.3.3 Allowable error range for circular interpolation................................................................................. 4-14
5. SERVO PROGRAMS FOR POSITIONING CONTROL
5- 1 to 5-26
5.1 Servo Program Composition Area........................................................................................................... 5- 1
5.1.1 Servo program composition.............................................................................................................. 5- 1
5.1.2 Servo program area .......................................................................................................................... 5- 2
5.2 Servo Instructions .................................................................................................................................... 5- 3
5.3 Positioning Data ....................................................................................................................................... 5-16
5.4 Setting Method for Positioning Data........................................................................................................ 5-22
5.4.1 Setting method by specifying numerical values ............................................................................... 5-22
5.4.2 Indirect setting method by devices ................................................................................................... 5-23
6. POSITIONING CONTROL
6- 1 to 6-236
6.1 Basics of Positioning Control ................................................................................................................... 6- 1
6.1.1 Positioning speed .............................................................................................................................. 6- 1
6.1.2 Positioning speed at the interpolation control .................................................................................. 6- 2
6.1.3 Control units for 1 axis positioning control........................................................................................ 6- 7
6.1.4 Control units for interpolation control................................................................................................ 6- 7
6.1.5 Control in the control unit "degree" ................................................................................................... 6- 9
6.1.6 Stop processing and restarting after stop........................................................................................ 6-11
6.1.7 Acceleration/deceleration processing............................................................................................... 6-17
6.2 1 Axis Linear Positioning Control............................................................................................................. 6-19
6.3 2 Axes Linear Interpolation Control ......................................................................................................... 6-22
6.4 3 Axes Linear Interpolation Control ......................................................................................................... 6-27
6.5 4 Axes Linear Interpolation Control ......................................................................................................... 6-33
6.6 Auxiliary Point-Specified Circular Interpolation Control .......................................................................... 6-38
6.7 Radius-Specified Circular Interpolation Control ...................................................................................... 6-43
6.8 Central Point-Specified Circular Interpolation Control ............................................................................ 6-49
6.9 Helical Interpolation Control..................................................................................................................... 6-55
6.9.1 Circular interpolation specified method by helical interpolation....................................................... 6-56
6.10 1 Axis Fixed-Pitch Feed Control............................................................................................................ 6-77
6.11 Fixed-Pitch Feed Control Using 2 Axes Linear Interpolation ............................................................... 6-81
6.12 Fixed-Pitch Feed Control Using 3 Axes Linear Interpolation ............................................................... 6-85
6.13 Speed Control ( ).................................................................................................................................... 6-89
6.14 Speed Control ( )................................................................................................................................... 6-93
6.15 Speed/Position Switching Control ......................................................................................................... 6-96
6.15.1 Speed/position switching control start ............................................................................................ 6-96
6.15.2 Re-starting after stop during control ............................................................................................. 6-103
6.16 Speed-Switching Control ..................................................................................................................... 6-108
6.16.1 Speed-switching control start, speed-switching points and end specification ............................ 6-108
6.16.2 Specification of speed-switching points using repetition instructions.......................................... 6-114
6.17 Constant-Speed Control ...................................................................................................................... 6-120
6.17.1 Specification of pass points by repetition instructions ................................................................. 6-124
6.17.2 Speed-switching by instruction execution .................................................................................... 6-129
6.17.3 1 axis constant-speed control ....................................................................................................... 6-134
6.17.4 2 to 4 axes constant-speed control............................................................................................... 6-138
6.17.5 Constant speed control for helical interpolation ........................................................................... 6-145
6.17.6 Pass point skip function ................................................................................................................ 6-148
A - 13
6.17.7 FIN signal wait function................................................................................................................. 6-150
6.18 Position Follow-Up Control .................................................................................................................. 6-160
6.19 Speed control with fixed position stop ................................................................................................. 6-167
6.20 Simultaneous Start............................................................................................................................... 6-172
6.21 JOG Operation ..................................................................................................................................... 6-175
6.21.1 JOG operation data....................................................................................................................... 6-175
6.21.2 Individual start ............................................................................................................................... 6-176
6.21.3 Simultaneous start ........................................................................................................................ 6-181
6.22 Manual Pulse Generator Operation .................................................................................................... 6-184
6.23 Home Position Return.......................................................................................................................... 6-191
6.23.1 Home position return data............................................................................................................. 6-192
6.23.2 Home position return by the proximity dog type 1 ....................................................................... 6-200
6.23.3 Home position return by the proximity dog type 2 ....................................................................... 6-203
6.23.4 Home position return by the count type 1 .................................................................................... 6-205
6.23.5 Home position return by the count type 2 .................................................................................... 6-207
6.23.6 Home position return by the count type 3 .................................................................................... 6-208
6.23.7 Home position return by the data set type 1 ................................................................................ 6-210
6.23.8 Home position return by the data set type 2 ................................................................................ 6-211
6.23.9 Home position return by the dog cradle type ............................................................................... 6-212
6.23.10 Home position return by the stopper type 1 ............................................................................... 6-217
6.23.11 Home position return by the stopper type 2 ............................................................................... 6-219
6.23.12 Home position return by the limit switch combined type............................................................ 6-221
6.23.13 Home position return retry function ............................................................................................ 6-223
6.23.14 Home position shift function........................................................................................................ 6-227
6.23.15 Condition selection of home position set.................................................................................... 6-231
6.23.16 Servo program for home position return .................................................................................... 6-232
6.24 High-Speed Oscillation ........................................................................................................................ 6-234
7. AUXILIARY AND APPLIED FUNCTIONS
7- 1 to 7-12
7.1 M-code Output Function .......................................................................................................................... 7- 1
7.2 Backlash Compensation Function........................................................................................................... 7- 4
7.3 Torque Limit Function .............................................................................................................................. 7- 6
7.4 Skip Function in which Disregards Stop Command ............................................................................... 7- 8
7.5 Cancel of the Servo Program .................................................................................................................. 7-10
7.5.1 Cancel/start ....................................................................................................................................... 7-11
APPENDICES
APP- 1 to APP-57
APPENDIX 1 Error Codes Stored Using The Motion CPU ....................................................................APP- 1
APPENDIX 1.1 Servo program setting errors (Stored in SD517)........................................................APP- 3
APPENDIX 1.2 Minor errors .................................................................................................................APP- 8
APPENDIX 1.3 Major errors .................................................................................................................APP-18
APPENDIX 1.4 Servo errors.................................................................................................................APP-22
APPENDIX 2 Example Programs.............................................................................................................APP-41
APPENDIX 2.1 Reading M-code..........................................................................................................APP-41
APPENDIX 2.2 Reading error code......................................................................................................APP-42
APPENDIX 3 Setting Range for Indirect Setting Devices........................................................................APP-44
APPENDIX 4 Processing Times of the Motion CPU ...............................................................................APP-46
APPENDIX 5 Device List ..........................................................................................................................APP-47
A - 14
About Manuals
The following manuals are also related to this product.
In necessary, order them by quoting the details in the tables below.
Related Manuals
(1) Motion controller
Manual Number
(Model Code)
Manual Name
Q173DCPU/Q172DCPU Motion controller User's Manual
This manual explains specifications of the Motion CPU modules, Q172DLX Servo external signal interface
module, Q172DEX Synchronous encoder interface module, Q173DPX Manual pulse generator interface
module, Power supply modules, Servo amplifiers, SSCNET
cables, Synchronous encoder cables and
IB-0300133
(1XB927)
others.
(Optional)
Q173DCPU/Q172DCPU Motion controller Programming Manual (COMMON)
This manual explains the Multiple CPU system configuration, performance specifications, common
parameters, auxiliary/applied functions, error lists and others.
IB-0300134
(1XB928)
(Optional)
Q173DCPU/Q172DCPU Motion controller (SV13/SV22) Programming Manual (Motion SFC)
This manual explains the functions, programming, debugging, error lists and others for Motion SFC.
IB-0300135
(1XB929)
(Optional)
Q173DCPU/Q172DCPU Motion controller (SV22) Programming Manual (VIRTUAL MODE)
This manual explains the dedicated instructions to use the synchronous control by virtual main shaft,
mechanical system program create mechanical module, servo parameters, positioning instructions, device
lists, error lists and others.
(Optional)
A - 15
IB-0300137
(1XB931)
(2) PLC
Manual Number
(Model Code)
Manual Name
QCPU User's Manual (Hardware Design, Maintenance and Inspection)
This manual explains the specifications of the QCPU modules, power supply modules, base modules,
extension cables, memory card battery and others.
SH-080483ENG
(13JR73)
(Optional)
QCPU User's Manual (Function Explanation, Program Fundamentals)
This manual explains the functions, programming methods and devices and others to create programs
with the QCPU.
SH-080484ENG
(13JR74)
(Optional)
QCPU User's Manual (Multiple CPU System)
This manual explains the functions, programming methods and cautions and others to construct the
Multiple CPU system with the QCPU.
SH-080485ENG
(13JR75)
(Optional)
QCPU (Q Mode)/QnACPU Programming Manual (Common Instructions)
This manual explains how to use the sequence instructions, basic instructions, application instructions and
micro computer program.
SH-080039
(13JF58)
(Optional)
QCPU (Q Mode)/QnACPU Programming Manual (PID Control Instructions)
SH-080040
(13JF59)
This manual explains the dedicated instructions used to exercise PID control.
(Optional)
QCPU (Q Mode)/QnACPU Programming Manual (SFC)
This manual explains the system configuration, performance specifications, functions, programming,
debugging, error codes and others of MELSAP3.
SH-080041
(13JF60)
(Optional)
I/O Module Type Building Block User's Manual
SH-080042
(13JL99)
This manual explains the specifications of the I/O modules, connector, connector/terminal block
conversion modules and others.
(Optional)
(3) Servo amplifier
Manual Number
(Model Code)
Manual Name
MR-J3- B Servo amplifier Instruction Manual
This manual explains the I/O signals, parts names, parameters, start-up procedure and others for
MR-J3- B Servo amplifier.
SH-030051
(1CW202)
(Optional)
Fully Closed Loop Control MR-J3- B-RJ006 Servo amplifier Instruction Manual
This manual explains the I/O signals, parts names, parameters, start-up procedure and others for Fully
Closed Loop Control MR-J3- B-RJ006 Servo amplifier.
(Optional)
A - 16
SH-030056
(1CW304)
1 OVERVIEW
1. OVERVIEW
1
1.1 Overview
This programming manual describes the positioning control parameters, positioning
dedicated devices and positioning method required to execute positioning control in the
Motion controller (SV13/22 real mode).
The following positioning control is possible in the Motion controller (SV13/22 real
mode).
Applicable CPU
Number of positioning control axes
Q173DCPU (32 axes)
Up to 32 axes
Q172DCPU (8 axes)
Up to 8 axes
In this manual, the following abbreviations are used.
Generic term/Abbreviation
Description
Q173DCPU/Q172DCPU or
Motion CPU (module)
Q173DCPU/Q172DCPU Motion CPU module
Q172DLX/Q172DEX/Q173DPX or
Motion module
Q172DLX Servo external signals interface module/
(Note-1)
Q172DEX Serial Synchronous encoder interface module
/
Q173DPX Manual pulse generator interface module
MR-J3- B
Servo amplifier model MR-J3- B
AMP or Servo amplifier
General name for "Servo amplifier model MR-J3- B"
QCPU, PLC CPU or PLC CPU module QnUD(H)CPU
Multiple CPU system or Motion system Abbreviation for "Multiple PLC system of the Q series"
CPUn
Abbreviation for "CPU No.n (n= 1 to 4) of the CPU module for the Multiple CPU
system"
Self CPU
Motion CPU being programmed by the currently open MT Developer project
Programming software package
General name for MT Developer/GX Developer/MR Configurator
Operating system software
General name for "SW8DNC-SV Q "
SV13
Operating system software for conveyor assembly use (Motion SFC) :
SW8DNC -SV13Q
SV22
Operating system software for automatic machinery use (Motion SFC) :
SW8DNC -SV22Q
MT Developer
Abbreviation for "Motion controller programming software
MT Developer2 (Version 1.00A or later)"
GX Developer
Abbreviation for "MELSEC PLC programming software package
GX Developer (Version 8.48A or later)"
MR Configurator
Abbreviation for "Servo setup software package
MR Configurator (Version C0 or later)"
Manual pulse generator or MR-HDP01 Abbreviation for "Manual pulse generator (MR-HDP01)"
Serial absolute synchronous encoder
or Q170ENC
SSCNET
(Note-2)
Absolute position system
Abbreviation for "Serial absolute synchronous encoder (Q170ENC)"
High speed synchronous network between Motion controller and servo
amplifier
General name for "system using the servomotor and servo amplifier for
absolute position"
1-1
1 OVERVIEW
Generic term/Abbreviation
Description
Battery holder unit
Battery holder unit (Q170DBATC)
External battery
General name for "Q170DBATC" and "Q6BAT"
Intelligent function module
Abbreviation for "MELSECNET/H module/Ethernet module/CC-Link module/
Serial communication module"
(Note-1) : Q172DEX can be used in SV22.
(Note-2) : SSCNET: Servo System Controller NETwork
REMARK
For information about the each module, design method for program and parameter,
refer to the following manuals relevant to each module.
Item
Reference Manual
Motion CPU module/Motion unit
Q173DCPU/Q172DCPU User’s Manual
PLC CPU, peripheral devices for PLC program design, I/O
modules and intelligent function module
Operation method for MT Developer
Manual relevant to each module
Help of each software
• Multiple CPU system configuration
SV13/SV22
• Performance specification
Q173DCPU/Q172DCPU Motion controller
• Design method for common parameter
Programming Manual (COMMON)
• Auxiliary and applied functions (common)
• Design method for Motion SFC program
• Design method for Motion SFC parameter
• Motion dedicated PLC instruction
SV22
(Virtual mode)
• Design method for mechanical system
program
Q173DCPU/Q172DCPU Motion controller (SV13/SV22)
Programming Manual (Motion SFC)
Q173DCPU/Q172DCPU Motion controller (SV22)
Programming Manual (VIRTUAL MODE)
CAUTION
When designing the system, provide external protective and safety circuits to ensure safety in
the event of trouble with the Motion controller.
There are electronic components which are susceptible to the effects of static electricity
mounted on the printed circuit board. When handling printed circuit boards with bare hands you
must ground your body or the work bench.
Do not touch current-carrying or electric parts of the equipment with bare hands.
Make parameter settings within the ranges stated in this manual.
Use the program instructions that are used in programs in accordance with the conditions
stipulated in this manual.
Some devices for use in programs have fixed applications: they must be used in accordance
with the conditions stipulated in this manual.
1-2
1 OVERVIEW
1.2 Features
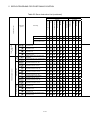
1.2.1 Performance Specifications
(1) Motion control specifications
Item
Number of control axes
Q173DCPU
Q172DCPU
Up to 32 axes
Up to 8 axes
0.44ms/ 1 to 6 axes
SV13
0.44ms/ 1 to 6 axes
0.88ms/ 7 to 18 axes
0.88ms/ 7 to 8 axes
1.77ms/19 to 32 axes
Operation cycle
0.44ms/ 1 to 4 axes
(default)
SV22
0.88ms/ 5 to 12 axes
0.44ms/ 1 to 4 axes
1.77ms/13 to 28 axes
0.88ms/ 5 to 8 axes
3.55ms/29 to 32 axes
Interpolation functions
Linear interpolation (Up to 4 axes), Circular interpolation (2 axes),
Helical interpolation (3 axes)
PTP(Point to Point) control, Speed control, Speed-position control, Fixed-pitch feed,
Control modes
Constant speed control, Position follow-up control, Speed control with fixed position stop,
Speed switching control, High-speed oscillation control, Synchronous control (SV22)
Acceleration/
Automatic trapezoidal acceleration/deceleration,
deceleration control
Compensation
S-curve acceleration/deceleration
Backlash compensation, Electronic gear, Phase compensation (SV22)
Programming language
Motion SFC, Dedicated instruction, Mechanical support language (SV22)
Servo program capacity
14k steps
Number of positioning
points
3200 points
(Positioning data can be designated indirectly)
Peripheral I/F
Home position return
function
Via PLC CPU (USB/RS-232)
Proximity dog type (2 types), Count type (3 types), Data set type (2 types), Dog cradle type,
Stopper type (2 types), Limit switch combined type
(Home position return re-try function provided, home position shift function provided)
JOG operation function
Provided
Manual pulse generator
Possible to connect 3 modules
operation function
Synchronous encoder
operation function
M-code function
Possible to connect 12 modules
M-code output function provided
M-code completion wait function provided
Limit switch output
function
Number of output points 32 points
Watch data: Motion control data/Word device
Absolute position system
Number of SSCNET
systems
Possible to connect 8 modules
(Note-1)
Made compatible by setting battery to servo amplifier.
(Possible to select the absolute data method or incremental method for each axis)
2 systems
1 system
1-3
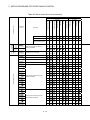
1 OVERVIEW
Motion control specifications (continued)
Item
Q173DCPU
Motion related interface
module
Q172DCPU
Q172DLX : 4 modules usable
Q172DLX : 1 module usable
Q172DEX : 6 modules usable
Q173DPX : 4 modules usable
Q172DEX : 4 modules usable
(Note-2)
Q173DPX : 3 modules usable
(Note-2)
(Note-1) : The servo amplifiers for SSCNET cannot be used.
(Note-2) : When using the incremental synchronous encoder (SV22 use), you can use above number of modules.
When connecting the manual pulse generator, you can use only 1 module.
1-4
2 POSITIONING CONTROL BY THE MOTION CPU
2. POSITIONING CONTROL BY THE MOTION CPU
2.1 Positioning Control by the Motion CPU
The positioning control of up to 32 axes in Q173DCPU and up to 8 axes in Q172DCPU
is possible in the Motion CPU.
There are following four functions as controls toward the servo amplifier/servomotor.
(1) Servo operation by the positioning instructions.
There are following two methods for execution of the positioning instruction.
(a) Programming using the motion control step "K" of Motion SFC.
The starting method of Motion SFC program is shown below.
1) Motion SFC start request (D(P).SFCS) of PLC CPU
2) Automatic start setting of Motion SFC program
(Note): Step "K" of the positioning instruction cannot be programmed to
NMI task and event task.
3) Start by the Motion SFC program (GSUB)
(b) Execution of servo program by the servo program start request (D(P).SVST) of
PLC CPU.
(2) JOG operation by the each axis command signal of Motion CPU.
(3) Manual pulse generator operation by the positioning dedicated device of Motion
CPU.
(4) Speed change and torque limit value change during positioning control by the
Motion dedicated PLC instruction (D(P).CHGV, D(P).CHGT) and Motion
dedicated function (CHGV, CHGT) of operation control step "F".
(Note): Refer to the "Q173DCPU/Q172DCPU Motion controller (SV13/SV22)
Programming Manual (Motion SFC)" for the Motion dedicated PLC
instruction.
2-1
2
2 POSITIONING CONTROL BY THE MOTION CPU
[Execution of the Motion SFC program start (D(P).SFCS instruction)]
Positioning control is executed by starting the Motion SFC program specified with
D(P).SFCS instruction of the PLC CPU in the Motion CPU. (The Motion SFC program
can also be started automatically by parameter setting.)
An overview of the starting method using the Motion SFC is shown below.
Multiple CPU control system
PLC CPU
PLC program
<Example> D(P).SFCS instruction
Positioning execute command
DP.SFCS H3E3
K15
M0
D0
Device which stores the
complete status
Complete device
Motion SFC program No.15
Target CPU
Start request of the
Motion SFC program
Start request of the
Motion SFC program
1) The Motion SFC program No. is set using the D(P).SFCS instruction
in the PLC program.
2) When the D(P).SFCS instruction is executed, the program of the
Motion SFC program No. specified with the Motion CPU is executed.
(1) Create/set the PLC programs, Motion SFC programs and positioning control
parameters using a programming software package.
(2) Perform the positioning start using the PLC program (D(P).SFCS instruction) of
PLC CPU.
(a) Motion SFC program No. is specified with the D(P).SFCS instruction.
1) Motion SFC program No. can be set either directly or indirectly.
(3) Perform the specified positioning control using the specified with Motion SFC
program.
2-2
2 POSITIONING CONTROL BY THE MOTION CPU
Motion CPU
Motion SFC program
Motion SFC program No.15
(Program No. specified with the D(P).SFCS instruction.)
START
F10
Once execution type operation control step
Command which performs numerical operation and
bit operation.
G100
"WAIT"
Command which transits to the next step by
formation of transition condition Gn.
K100
Motion control step
Command which performs starting of the servo
program "Kn", etc.
G101
END
Servo amplifier
Positioning control parameters
System settings
System data such as axis allocations
Fixed parameters
Fixed data by the mechanical system, etc.
Servo parameters
Data by the specifications of the connected
servo amplifier
Parameters block
Data required for the acceleration, deceleration
of the positioning control, etc.
Home position return data
Data required for the home position return
JOG operation data
Data required for the JOG operation
Limit switch output data
ON/OFF pattern data required for the limit
switch output function
2-3
Servomotor
2 POSITIONING CONTROL BY THE MOTION CPU
[Execution of the positioning control (Motion SFC program)]
The positioning control is executed using the servo program specified with the Motion
SFC program in the Motion CPU system.
An overview of the positioning control is shown below.
Motion CPU control system
Motion SFC program
1 axis linear positioning control
[F100]
SET M2042
All axes servo ON command on
[G200]
PX000*M2475
Stand by until PX000 is on and Axis 4
servo ON.
[K100]
ABS-1
Axis
4, 80000PLS
Speed
10000PLS/s
[G210]
!PX000
1 axis linear positioning control
Axis used . . . . . . . . . . . Axis 4
Positioning address . . . 80000[PLS]
Command speed . . . . . 10000[PLS/s]
Start request of the
servo program
Stand by until PX000 is OFF after
positioning completion.
END
(1) Create/set the Motion SFC programs, servo programs and positioning control
parameters using a programming software package.
(2) Specify the servo program started by the Motion SFC program.
(3) Perform the specified positioning control using the specified with servo program.
2-4
2 POSITIONING CONTROL BY THE MOTION CPU
Servo program
<K 100>
Servo instruction
(Specification of the positioning control method)
ABS-1
Axis
Speed
4,
Dwell time
M-code
80000
10000
-
Positioning data which must be set:
Axis used, positioning address and positioning
speed, etc.
Positioning data to be set if required:
Dwell time, M-code, etc.
Servo amplifier
Positioning control parameters
System settings
System data such as axis allocations
Fixed parameters
Fixed data by the mechanical system, etc.
Servo parameters
Data by the specifications of the connected
servo amplifier
Parameters block
Data required for the acceleration, deceleration
of the positioning control, etc.
Home position return data
Data required for the home position return
JOG operation data
Data required for the JOG operation
Limit switch output data
ON/OFF pattern data required for the limit
switch output function
2-5
Servomotor
2 POSITIONING CONTROL BY THE MOTION CPU
[Execution of the servo program start (D(P).SVST instruction)]
Positioning control is executed by starting the specified servo program toward the axis
specified with D(P).SVST instruction of PLC CPU in the Motion CPU.
An overview of the starting method using the servo program is shown below.
Multiple CPU control system
PLC CPU
PLC program
<Example> DP.SVST instruction
Positioning execute command
DP.SVST H3E3 "J3J4"
K25
M0
D0
Device which stores the
complete status
Complete device
Servo program No.25
Starting axis No.3 and 4
Target CPU
Start request of the
servo program
Start request of the
servo program
1) The starting axis No. and servo program No. are set using the
D(P).SVST instruction in the PLC program.
2) When the D(P).SVST instruction is executed, the program of the
servo program No. is executed toward the specified axis.
(1) Create/set the PLC programs, servo programs and positioning control parameters
using a programming software package.
(2) Perform the positioning start using the PLC program (D(P).SVST instruction) of
PLC CPU.
(a) Starting axis No. and servo program No. are specified with the D(P).SVST
instruction.
1) Servo program No. can be set either directly or indirectly.
(3) Perform the positioning control of specified servo program toward the specified
axis.
2-6
2 POSITIONING CONTROL BY THE MOTION CPU
Motion CPU
Servo program
Servo program No.25
(Servo program No. specified with the D(P).SVST instruction.)
<K 25>
ABS-2
Axis
Axis
Vector speed
2 axes linear interpolation control
3,
4,
50000
40000
30000
Axis used . . . . . . . . . . . Axis 3, Axis 4
Travel value to stop
position
Axis 3 . . . . . . 50000
Axis 4 . . . . . . 40000
Command positioning speed
Vector speed . . . . . . 30000
Servo amplifier
Positioning control parameters
Servomotor
System settings
System data such as axis allocations
Fixed parameters
Fixed data by the mechanical system, etc.
Servo parameters
Data by the specifications of the connected
servo amplifier
Parameters block
Data required for the acceleration, deceleration
of the positioning control, etc.
Home position return data
Data required for the home position return
JOG operation data
Data required for the JOG operation
Limit switch output data
ON/OFF pattern data required for the limit
switch output function
2-7
2 POSITIONING CONTROL BY THE MOTION CPU
[Execution of the JOG operation]
JOG operation of specified axis is executed using the Motion SFC program in the
Motion CPU. JOG operation can also be executed by controlling the JOG dedicated
device of specified axis.
An overview of JOG operation is shown below.
Motion CPU control system
Motion SFC program
JOG
[F120]
D640L=K100000
Axis 1 JOG operation speed = 100000[PLS/s]
P0
[G120]
SET M3202=PX000 * !M3203
[G130]
RST M3202=!PX000
Axis 1 forward JOG command SET
Axis 1 forward JOG command RST
JOG operation by
the JOG dedicated
device control
P0
Note) : Do not stop this task during operation.
Operation may not stop.
(1) Create/set the Motion SFC programs, positioning control parameters using a
programming software package.
(2) Set the JOG speed to the JOG speed setting register for each axis using the
Motion SFC program.
(3) Perform the JOG operation while the JOG start command signal is ON in the
Motion SFC program.
2-8
2 POSITIONING CONTROL BY THE MOTION CPU
Positioning control parameter
System settings
System data such as axis allocations
Fixed parameters
Fixed data by the mechanical system, etc.
Servo parameters
Parameter block
Data by the specifications of the connected
servo amplifier
Data required for the acceleration, deceleration
of the positioning control, etc.
Home position return data
Data required for the home position return
JOG operation data
Data required for the JOG operation
Limit switch output data
ON/OFF pattern data required for the limit
switch output function
Servo amplifier
Servomotor
2-9
2 POSITIONING CONTROL BY THE MOTION CPU
[Executing Manual Pulse Generator Operation]
When the positioning control is executed by the manual pulse generator connected to
the Q173DPX, manual pulse generator operation must be enabled using the Motion
SFC program.
An overview of manual pulse generator operation is shown below.
Motion CPU control system
Motion SFC program
Manual pulse generator operation
[F130]
D720=100
D714L=H0000001
SET M2051
Set "axis 1" 1-pulse input magnification.
Control axis 1 by P1.
P1 manual pulse generator enable flag
ON.
Manual pulse generator operation
by the manual pulse generator
dedicated device
END
(1) Create/set the Motion SFC programs, positioning control parameters using a
programming software package.
(2) Set the used manual pulse generator, operated axis No. and magnification for 1
pulse input using the Motion SFC program.
(3) Turn the manual pulse generator enable flag on using the Motion SFC program
................................................ Manual pulse generator operation enabled
(4) Perform the positioning by operating the manual pulse generator.
(5) Turn the manual pulse generator enable flag OFF using the Motion SFC program
............................................ Manual pulse generator operation completion
2 - 10
2 POSITIONING CONTROL BY THE MOTION CPU
Positioning control parameter
System settings
System data such as axis allocations
Fixed parameters
Fixed data by the mechanical system, etc.
Servo parameters
Data by the specifications of the connected
servo amplifier
Parameter block
Data required for the acceleration, deceleration
of the positioning control, etc.
Home position return data
Data required for the home position return
JOG operation data
Data required for the JOG operation
Limit switch output data
ON/OFF pattern data required for the limit
switch output function
Servo amplifier
Servomotor
Manual pulse generator
2 - 11
2 POSITIONING CONTROL BY THE MOTION CPU
(1) Positioning control parameters
There are following seven types as positioning control parameters.
Parameter data can be set and corrected interactively using MT Developer.
Item
1 System settings
2
3
4
5
Description
Multiple system settings, Motion modules and axis No., etc. are set.
Data by such as the mechanical system are set for every axis.
Fixed
parameters
They are used for calculation of a command position at the
positioning control.
Reference
Section
4.1
Section
4.2
Data by such as the servo amplifier and motor type with connected
Servo
parameters
servomotor are set for every axis.
(Note-1)
They are set to control the servomotors at the positioning control.
Home position
Data such as the direction, method and speed of the home position
Section
return data
return used at the positioning control are set for every axis.
6.23.1
JOG operation
Data such as the JOG speed limit value and parameter block No.
Section
data
used at the JOG operation are set for every axis.
6.21.1
Data such as the acceleration, deceleration time and speed control
value at the positioning control are set up to 16 parameter blocks.
6 Parameter block
They are set with the servo program, JOG operation data and home
position return data, and it is used to change easily the
Section
4.3
acceleration/deceleration processing (acceleration/deceleration time
and speed limit value) at the positioning control.
7
Limit switch
output data
Output device, watch data, ON section, output enable/disable bit and
forced output bit used for the limit output function for every limit
(Note-2)
output are set.
(Note-1): Refer to Section 3.3 of the "Q173DCPU/Q172DCPU Motion controller Programming Manual
(COMMON)".
(Note-2): Refer to Section 4.1 of the "Q173DCPU/Q172DCPU Motion controller Programming Manual
(COMMON)".
(2) Servo program
The servo program is used for the positioning control in the Motion SFC program.
The positioning control by servo program is executed using the Motion SFC
program and Motion dedicated PLC instruction (Servo program start request
(D(P).SVST)) .
It comprises a program No., servo instructions and positioning data.
Refer to Chapter 5 for details.
• Program No. ............... It is specified using the Motion SFC program and
Motion dedicated PLC instruction.
• Servo instruction ......... It indicates the type of positioning control.
• Positioning data .......... It is required to execute the servo instructions.
The required data is fixed for every servo instruction.
2 - 12
2 POSITIONING CONTROL BY THE MOTION CPU
(3) Motion SFC program
Motion SFC program is used to execute the operation sequence or transition
control combining "Start", "Step", Transition", or "End" to the servo program.
The positioning control, JOG operation and manual pulse generator operation by
the servo program can be executed.
Refer to the "Q173DCPU/Q172DCPU Motion controller (SV13/SV22)
Programming Manual (Motion SFC)" for details.
(4) PLC program
The positioning control by the servo program can be executed using the Motion
dedicated PLC instruction of PLC program.
Refer to the "Q173DCPU/Q172DCPU Motion controller (SV13/SV22)
Programming Manual (Motion SFC)" for details.
2 - 13
2 POSITIONING CONTROL BY THE MOTION CPU
MEMO
2 - 14
3 POSITIONING DEDICATED SIGNALS
3. POSITIONING DEDICATED SIGNALS
The internal signals of the Motion CPU and the external signals to the Motion CPU
are used as positioning signals.
(1) Internal signals
The following five devices of the Motion CPU are used as the internal signals of
the Motion CPU.
• Internal relay (M) ..............................M2000 to M3839 (1840 points)
• Special relay (SM) ...........................SM0 to SM2255 (2256 points)
• Data register (D) ..............................D0 to D799 (800 points)
• Motion register (#) ............................ #8000 to #8735 (736 points)
• Special register (SD) ....................... SD0 to SD2255 (2256 points)
(2) External signals
The external input signals to the Motion CPU are shown below.
• Upper/lower limit switch input .......... The upper/lower limit of the positioning
range is controlled.
• Stop signal ....................................... This signal makes the starting axis stop.
• Proximity dog signal ........................ ON/OFF signal from the proximity dog.
• Speed/position switching signal ...... Signal for switching from speed to position.
• Manual pulse generator input .......... Signal from the manual pulse generator.
PLC CPU
Configuration between modules
2)
1)
Device memory
PLC control
processor
Multiple CPU
high speed
transmission
memory
Motion CPU
Device memory
Multiple CPU
high speed
bus
Multiple CPU
high speed
transmission
memory
Motion control
processor
SSCNET
Q series PLC system bus
Servo
amplifier
PLC I/O module
(DI/O)
PLC intelligent
function module
(A/D, D/A, etc.)
Motion module
(Proximity dog signal, manual
pulse generator input)
M
M Servomotor
Note) : Device memory data : 1) = 2)
Fig.3.1 Flow of the internal signals/external signals
3-1
3
3 POSITIONING DEDICATED SIGNALS
The positioning dedicated devices are shown below.
It indicates the device refresh cycle of the Motion CPU for status signal with the
positioning control, and the device fetch cycle of the Motion CPU for command signal
with the positioning control.
The operation cycle of the Motion CPU is shown below.
Item
Q173DCPU
Q172DCPU
Up to 32 axes
Up to 8 axes
SV13
0.44ms/ 1 to 6 axes
0.88ms/ 7 to 18 axes
1.77ms/ 19 to 32 axes
0.44ms/ 1 to 6 axes
0.88ms/ 7 to 8 axes
SV22
0.44ms/ 1 to 4 axes
0.88ms/ 5 to 12 axes
1.77ms/ 13 to 28 axes
3.55ms/ 29 to 32 axes
0.44ms/ 1 to 4 axes
0.88ms/ 5 to 8 axes
Number of control axes
Operation cycle
(Default)
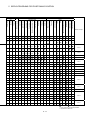
REMARK
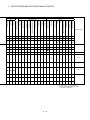
In the positioning dedicated signals, "n" in "M3200+20n", etc. indicates a value
corresponding to axis No. such as the following tables.
Axis No.
n
Axis No.
n
Axis No.
n
1
2
0
9
8
17
16
25
24
1
10
9
18
17
26
25
3
2
11
10
19
18
27
26
4
3
12
11
20
19
28
27
5
4
13
12
21
20
29
28
6
5
14
13
22
21
30
29
7
6
15
14
23
22
31
30
8
7
16
15
24
23
32
31
• Calculate as follows for the device No. corresponding to each axis.
(Example) For axis 32
M3200+20n (Stop command)=M3200+20 31=M3820
M3215+20n (Servo OFF command)=M3215+20 31=M3835
• The range (n=0 to 7) of axis No.1 to 8 is valid in the Q172DCPU.
3-2
Axis No.
n
3 POSITIONING DEDICATED SIGNALS
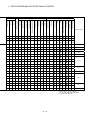
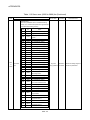
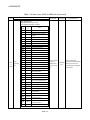
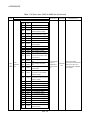
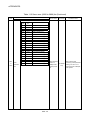
3.1 Internal Relays
(1) Internal relay list
SV13
Device No.
M0
SV22
Purpose
Device No.
M0
User device
(2000 points)
to
M2000
to
M2320
to
to
Common device
(320 points)
M2000
Unusable
(80 points)
M2320
to
to
M2400
M2400
Axis status
(20 points
to
M3040
to
M3072
to
M3136
to
32 axes)
to
Unusable
(32 points)
M3040
Common device (Command signal)
(64 points)
M3072
Unusable
(64 points)
M3136
to
to
M3200
M3200
Axis command signal
(20 points
32 axes)
to
to
to
M3840
M3840
to
M4000
to
M4640
to
M4688
to
User device
(4352 points)
to
M4800
to
M5440
to
M5488
to
M8191
M8191
Purpose
User device
(2000 points)
Common device
(320 points)
Unusable
(80 points)
Axis status
(20 points
32 axes)
Real mode……Each axis
Virtual mode….Output module
Unusable
(32 points)
Common device (Command signal)
(64 points)
Unusable
(64 points)
Axis command signal
(20 points
32 axes)
Real mode……Each axis
Virtual mode….Output module
Unusable
(160 points)
Virtual servomotor axis status (Note-1)
(20 points
32 axes)
Synchronous encoder axis status
(4 points
12 axes)
Unusable (Note-1)
(112 points)
Virtual servomotor axis command
signal (Note-1)
(20 points
32 axes)
Synchronous encoder axis
command signal
(4 points
12 axes)
User device
(2704 points)
It can be used as an user device.
(Note-1): It can be used as an user device in the SV22 real mode only.
POINT
• Total number of user device points
(Note)
(SV22)
6352 points (SV13) / 4074 points
(Note): Up to 6096 points can be used when not using it in the virtual mode.
3-3
3 POSITIONING DEDICATED SIGNALS
(2) Axis status list
Axis No.
Device No.
1
M2400 to M2419
Signal name
2
M2420 to M2439
3
M2440 to M2459
4
M2460 to M2479
0
Positioning start complete
5
M2480 to M2499
1
Positioning complete
6
M2500 to M2519
2
In-position
7
M2520 to M2539
3
Command in-position
Signal name
Refresh cycle
Fetch cycle
Signal direction
Operation cycle
8
M2540 to M2559
4
Speed controlling
9
M2560 to M2579
5
Speed/position switching latch
10
M2580 to M2599
6
Zero pass
11
M2600 to M2619
7
Error detection
12
M2620 to M2639
8
Servo error detection
13
M2640 to M2659
9
Home position return request
14
M2660 to M2679
10
Home position return complete
15
M2680 to M2699
11
16
M2700 to M2719
12
17
M2720 to M2739
13
Immediate
Status signal
Operation cycle
Main cycle
Operation cycle
FLS
External RLS
signals STOP
Main cycle
18
M2740 to M2759
14
19
M2760 to M2779
15
Servo ready
DOG/CHANGE
20
M2780 to M2799
16
Torque limiting
21
M2800 to M2819
17
Unusable
22
M2820 to M2839
23
M2840 to M2859
18
24
M2860 to M2879
Virtual mode continuation
operation disable warning
(Note-1)
signal (SV22)
At virtual mode
transition
25
M2880 to M2899
19
M-code outputting signal
Operation cycle
26
M2900 to M2919
27
M2920 to M2939
28
M2940 to M2959
29
M2960 to M2979
30
M2980 to M2999
31
M3000 to M3019
32
M3020 to M3039
Operation cycle
—
—
—
Status signal
(Note-1): It is unusable in the SV13/SV22 real mode.
POINT
(1) The range of axis No.1 to 8 is valid in the Q172DCPU.
(2) The device area more than 9 axes as an user device in the Q172DCPU.
However, when the project of Q172DCPU is replaced with Q173DCPU, this area
cannot be used.
3-4
3 POSITIONING DEDICATED SIGNALS
(3) Axis command signal list
Axis No.
Device No.
1
M3200 to M3219
2
M3220 to M3239
3
M3240 to M3259
Signal name
Signal name
Refresh cycle
4
M3260 to M3279
0
Stop command
5
M3280 to M3299
1
Rapid stop command
6
M3300 to M3319
2
Forward rotation JOG start command
7
M3320 to M3339
3
Reverse rotation JOG start command
8
M3340 to M3359
4
Complete signal OFF command
9
M3360 to M3379
10
M3380 to M3399
5
Speed/position switching enable
command
Fetch cycle
Signal
direction
Operation cycle
11
M3400 to M3419
6
Unusable
12
M3420 to M3439
7
Error reset command
13
M3440 to M3459
8
Servo error reset command
14
M3460 to M3479
15
M3480 to M3499
9
External stop input disable at start
command
16
M3500 to M3519
10
17
M3520 to M3539
11
18
M3540 to M3559
19
M3560 to M3579
20
M3580 to M3599
21
M3600 to M3619
22
M3620 to M3639
23
M3640 to M3659
Main cycle
Command
signal
Operation cycle
Main cycle
At start
Command
signal
Unusable
12
Feed current value update request
command
13
Address clutch reference setting
(Note-1)
command (SV22 only)
Cam reference position setting
14
(Note-1)
command (SV22 only)
24
M3660 to M3679
15 Servo OFF command
25
M3680 to M3699
16 Gain changing command
At start
At virtual mode
transition
Command
signal
Operation cycle
Operation cycle
26
M3700 to M3719
17 Unusable
27
M3720 to M3739
18 Control loop changing command
28
M3740 to M3759
29
M3760 to M3779
30
M3780 to M3799
31
M3800 to M3819
32
M3820 to M3839
(Note-2)
Operation cycle
19 FIN signal
Command
signal
(Note-1): It is unusable in the SV13/SV22 real mode.
(Note-2): Operation cycle 7.1[ms] or more: Every 3.5[ms]
POINT
(1) The range of axis No.1 to 8 is valid in the Q172DCPU.
(2) The device area more than 9 axes as an user device in the Q172DCPU.
However, when the project of Q172DCPU is replaced with Q173DCPU, this area
cannot be used.
3-5
3 POSITIONING DEDICATED SIGNALS
(4) Common device list
Device
Signal name
No.
Refresh cycle
M2000 PLC ready flag
Fetch cycle
Main cycle
Signal
Remark
Device
direction
(Note-4)
No.
M3072
M2053
Command
signal
M2001 Axis 1
Signal name
Manual pulse generator 3
M2003 Axis 3
M2055
M2004 Axis 4
M2056
M2005 Axis 5
M2057 Unusable
M2006 Axis 6
M2058 (6 points)
M2007 Axis 7
M2059
M2008 Axis 8
M2060
M2009 Axis 9
M2061 Axis 1
M2010 Axis 10
M2062 Axis 2
M2011 Axis 11
M2063 Axis 3
M2012 Axis 12
M2064 Axis 4
M2013 Axis 13
M2065 Axis 5
M2014 Axis 14
M2017 Axis 17
Start accept flag
Operation cycle
M2018 Axis 18
Status
M2067 Axis 7
signal
M2068 Axis 8
(Note-1),
M2069 Axis 9
(Note-2)
M2070 Axis 10
M2019 Axis 19
M2071 Axis 11
M2020 Axis 20
M2072 Axis 12
M2021 Axis 21
M2073 Axis 13
M2022 Axis 22
M2074 Axis 14
M2023 Axis 23
M2075 Axis 15
M2024 Axis 24
M2076 Axis 16 Speed changing
M2025 Axis 25
M2077 Axis 17 accepting flag
M2026 Axis 26
M2078 Axis 18
M2027 Axis 27
M2079 Axis 19
M2028 Axis 28
M2080 Axis 20
M2029 Axis 29
M2081 Axis 21
M2030 Axis 30
M2082 Axis 22
M2031 Axis 31
M2083 Axis 23
M2032 Axis 32
M2084 Axis 24
M2033 Unusable
M2034 (2 points)
M2035
—
Motion error history clear
M2037 (2 points)
M2038 Motion SFC debugging flag
—
Immediate
Speed switching point specified
At start
flag
M2044
—
Operation cycle
Operation cycle
Real mode/virtual mode
At virtual mode
switching request (SV22)
Command
transition
signal
—
signal
—
—
—
signal
M2093
M2094
M3073
M2096 Unusable
M2097 (8 points)
signal
M2098
signal
transition
M3074
M3075
Manual pulse generator 2
enable flag
—
—
—
—
M2099
M2100
M2101 Axis 1
M2104 Axis 4
Synchronous
Status
M2105 Axis 5
encoder current
signal
M2106 Axis 6
value changing flag
M2107 Axis 7
(Note-3)
M2109 Axis 9
Main cycle
Command
signal
signal
(Note-1),
(Note-2)
—
Main cycle
Command
signal
M2111 Axis 11
M2112 Axis 12
M2113
signal
—
(12 axes)
M2110 Axis 10
M3076
Status
Operation cycle
—
Status
Operation cycle
M2108 Axis 8
Operation cycle
Manual pulse generator 1
enable flag
M2095
M2103 Axis 3
start command
M2050 Unusable
M2088 Axis 28
M2092 Axis 32
At virtual mode
JOG operation simultaneous
M2049 All axes servo ON accept flag
M2087 Axis 27
M2091 Axis 31
M2046 Out-of-sync warning (SV22)
M2047 Motion slot fault detection flag
(Note-2)
Status
Command
signal
(Note-1),
M2090 Axis 30
signal
Command
Status
Operation cycle
M2102 Axis 2
signal (SV22)
M2052
M3079
M2089 Axis 29
—
switching status (SV22)
M2045 switching error detection
M2051
signal
M2086 Axis 26
M3080
Real mode/virtual mode
Real mode/virtual mode
M2048
Command
M2085 Axis 25
—
Status
transition
M2042 All axes servo ON command
M2043
—
At debugging mode
M2039 Motion error detection flag
M2041 System setting error flag
—
Main cycle
request flag
M2036 Unusable
M2040
Remark
(Note-4)
Status
Operation cycle
—
Signal
direction
M2066 Axis 6
M2015 Axis 15
M2016 Axis 16
Fetch cycle
Main cycle
enable flag
M2054 Operation cycle over flag
M2002 Axis 2
Refresh cycle
—
M2114
M3077
M3078
M2115
M2116
M2117
M2118
3-6
Unusable
(6 points)
—
—
—
—
3 POSITIONING DEDICATED SIGNALS
Common device list (Continued)
Device
Signal name
No.
Refresh cycle
Fetch cycle
Signal
Remark
Device
direction
(Note-4)
No.
M2119
M2188
M2120
M2189
M2121
M2122
M2123
M2124
Signal name
(9 points)
—
—
—
—
—
—
—
—
M2191
—
—
—
—
M2192
M2193
M2194
M2126
M2195
M2127
M2196
M2128 Axis 1
M2197
M2129 Axis 2
M2198
M2130 Axis 3
M2199
M2131 Axis 4
M2200
M2132 Axis 5
M2201
M2133 Axis 6
M2202
M2134 Axis 7
M2203
M2135 Axis 8
M2204
M2136 Axis 9
M2205
M2137 Axis 10
M2206
M2138 Axis 11
M2207
M2139 Axis 12
M2208
M2140 Axis 13
M2209
M2141 Axis 14
Unusable
(36 points)
(Note-5)
M2210
M2142 Axis 15
M2143 Axis 16
Automatic
M2144 Axis 17
decelerating flag
Operation cycle
M2145 Axis 18
Status
M2211
signal
M2212
(Note-1),
M2213
(Note-2)
M2214
M2146 Axis 19
M2215
M2147 Axis 20
M2216
M2148 Axis 21
M2217
M2149 Axis 22
M2218
M2150 Axis 23
M2219
M2151 Axis 24
M2220
M2152 Axis 25
M2221
M2153 Axis 26
M2222
M2154 Axis 27
M2223
M2155 Axis 28
M2224
M2156 Axis 29
M2225
M2157 Axis 30
M2226
M2158 Axis 31
M2227
M2159 Axis 32
M2228
M2160
M2229
M2161
M2230
M2162
M2163
M2231 Unusable
M2232 (16 points)
M2164
M2233
M2165
M2234
M2166
M2235
M2167
M2236
M2168
M2237
M2169
M2238
M2170
M2239
M2171
M2240 Axis 1
M2172
M2174
Remark
(Note-4)
Fetch cycle
M2190
Unusable
M2125
M2173
Signal
direction
Refresh cycle
M2241 Axis 2
Unusable
(28 points)
(Note-5)
—
—
—
—
M2242 Axis 3
M2243 Axis 4
M2175
M2244 Axis 5
M2176
M2245 Axis 6
M2177
M2246 Axis 7
M2178
M2247 Axis 8
M2179
M2248 Axis 9
M2180
M2249 Axis 10
M2181
M2250 Axis 11
M2182
M2251 Axis 12
M2183
M2252 Axis 13
M2184
M2253 Axis 14
M2185
M2254 Axis 15
M2186
M2255 Axis 16
M2187
M2256 Axis 17
3-7
Status
Speed change "0"
accepting flag
Operation cycle
signal
(Note-1),
(Note-2)
3 POSITIONING DEDICATED SIGNALS
Common device list (Continued)
Device
No.
Signal name
Refresh cycle
Fetch cycle
Signal
Remark
Device
direction
(Note-4)
No.
M2257 Axis 18
M2289 Axis 18
M2258 Axis 19
M2290 Axis 19
M2259 Axis 20
M2291 Axis 20
M2260 Axis 21
M2292 Axis 21
M2261 Axis 22
M2293 Axis 22
M2262 Axis 23
M2263 Axis 24
M2264 Axis 25
M2265 Axis 26
M2295 Axis 24
M2296 Axis 25
accepting flag
M2297 Axis 26
M2298 Axis 27
M2267 Axis 28
M2299 Axis 28
M2268 Axis 29
M2300 Axis 29
M2269 Axis 30
M2301 Axis 30
M2270 Axis 31
M2272 Axis 1
Operation cycle
M2273 Axis 2
M2274 Axis 3
Status
M2303 Axis 32
signal
M2304
(Note-1),
M2305
(Note-2)
M2306
M2275 Axis 4
M2307
M2276 Axis 5
M2308
M2277 Axis 6
M2309
M2278 Axis 7
M2281 Axis 10
Fetch cycle
Signal
Remark
direction
(Note-4)
Status
Control loop
monitor status
signal
Operation cycle
(Note-1),
(Note-2)
M2302 Axis 31
M2271 Axis 32
M2280 Axis 9
Refresh cycle
M2294 Axis 23
Speed change "0"
M2266 Axis 27
M2279 Axis 8
Signal name
M2310
Control loop
monitor status
M2311 Unusable
M2312 (16 points)
—
—
—
—
M2313
M2282 Axis 11
M2314
M2283 Axis 12
M2315
M2284 Axis 13
M2316
M2285 Axis 14
M2317
M2286 Axis 15
M2318
M2287 Axis 16
M2319
M2288 Axis 17
(Note-1): The range of axis No.1 to 8 is valid in the Q172DCPU.
(Note-2): Device area of 9 axes or more is unusable in the Q172DCPU.
(Note-3): This signal is unusable in the SV13/SV22 real mode.
(Note-4): It can also be ordered the device of a remark column.
(Note-5): These devices can be used as the clutch statuses.
The clutch status can also be set as the optional device at the clutch parameter.
Refer to Chapter 7 of the "Q173DCPU/Q172DCPU Motion controller (SV22)
Programming Manual (VIRTUAL MODE)" for details.
3-8
3 POSITIONING DEDICATED SIGNALS
(5) Common device list (Command signal)
Device No.
Signal name
M3072
PLC ready flag
M3073
Speed switching point specified flag
M3074
All axes servo ON command
M3075
Real mode/virtual mode switching
request (SV22)
Refresh cycle
Fetch cycle
Signal direction
Remark
(Note-1), (Note-2)
Main cycle
M2000
At start
M2040
Operation
cycle
M2042
At virtual mode
transition
M2043
Command
signal
M3076
JOG operation simultaneous start
command
M3077
Manual pulse generator 1 enable flag
M3078
Manual pulse generator 2 enable flag
M3079
Manual pulse generator 3 enable flag
M2053
M3080
Motion error history clear request flag
M2035
M3081
to
Unusable
M2048
M2051
Main cycle
M2052
(Note-3)
—
(55 points)
—
—
—
M3135
(Note-1): The state of a device is not in agreement when the device of a remark column is turned ON/OFF directly. In addition,
when the request from a data register and the request from the above device are performed simultaneously, the
request from the above device becomes effective.
(Note-2): It can also be ordered the device of a remark column.
(Note-3): Do not use it as an user device. It can be used as a device that performs automatic refresh because of area for the
reserve of command signal.
POINT
The device of a remark column turns ON by OFF to ON of the above device, and
turns OFF by ON to OFF of the above device.
The command signal cannot be turned ON/OFF by the PLC CPU in the automatic
refresh because the statuses and commands are mixed together in M2000 to
M2053. Use the above devices in the case.
And, it can also be turned ON/OFF by the data register. (Refer to Section 3.2.3)
3-9
3 POSITIONING DEDICATED SIGNALS
3.1.1 Axis statuses
(1) Positioning start complete signal (M2400+20n) .......... Status signal
(a) This signal turns on with the start completion for the positioning control of
the axis specified with the servo program. It does not turn on at the starting
using JOG operation or manual pulse generator operation.
It can be used to read a M-code at the positioning start.
(Refer to Section 7.1.)
(b) This signal turns off at leading edge of complete signal OFF command
(M3204+20n) or positioning completion.
At leading edge of complete signal OFF command (M3204+20n)
V
Dwell time
t
Servo program start
ON
Start accept flag
(M2001 to M2032)
OFF
Positioning start complete signal
(M2400+20n)
OFF
Complete signal OFF command
(M3204+20n)
OFF
ON
ON
At positioning completion
Dwell time
V
Positioning completion
t
Servo program start
ON
Start accept flag
(M2001 to M2032)
OFF
Positioning start complete signal
(M2400+20n)
OFF
ON
3 - 10
3 POSITIONING DEDICATED SIGNALS
(2) Positioning complete signal (M2401+20n) ..................Status signal
(a) This signal turns on with the completion of the command output to
positioning address for the axis specified with the servo program.
It does not turn on at the start or stop on the way using home position
return, JOG operation, manual pulse generator operation or speed control.
It does not turn on at the stop on the way during positioning.
It can be used to read a M-code at the positioning completion.
(Refer to Section 7.1.)
(b) This signal turns off at leading edge of complete signal OFF command
(M3204+20n) or positioning start.
At leading edge of complete signal OFF command (M3204+20n)
V
Dwell time
t
Servo program start
ON
ON
Start accept flag
(M2001 to M2032)
OFF
Positioning complete signal
(M2401+20n)
OFF
Complete signal OFF
command (M3204+20n)
OFF
OFF
ON
ON
At next positioning start
V
Dwell time
Positioning
completion
Positioning start
t
Servo program start
ON
ON
Start accept flag
(M2001 to M2032)
OFF
Positioning complete signal
(M2401+20n)
OFF
OFF
ON
CAUTION
The deviation counter value is not considered, so that the positioning complete signal (M2401+20n)
turns on with the completion of the command output to positioning address. Use the positioning
complete signal (M2401+20n) together with the in-position signal (M2402+20n) to confirm the
positioning completion of servo axis in the final instruction under program.
3 - 11
3 POSITIONING DEDICATED SIGNALS
(3) In-position signal (M2402+20n) ...................................Status signal
(a) This signal turns on when the number of droop pulses in the deviation
counter becomes below the "in-position range" set in the servo parameters.
It turns off at the start.
Number of droop pulses
In-position range
t
ON
In-position
(M2402+20n)
OFF
(b) An in-position check is performed in the following cases.
• When the servo power supply is turned on.
• After the automatic deceleration is started during positioning control.
• After the deceleration is started with the JOG start signal OFF.
• During the manual pulse generator operation.
• After the proximity dog ON during a home position return.
• After the deceleration is started with the stop command.
• When the speed change to a speed "0" is executed.
(4) Command in-position signal (M2403+20n) .................Status signal
(a) This signal turns on when the absolute value of difference between the
command position and feed current value becomes below the "command
in-position range" set in the fixed parameters.
This signal turns off in the following cases.
• Positioning control start
• Home position return
• Speed control
• JOG operation
• Manual pulse generator operation
(b) Command in-position check is continually executed during position control.
This check is not executed during speed control or speed control in the
speed/position switching control.
(b)
V
Command in-position setting
Position
control
start
Speed/position
control start
Switch from speed to position
Command in-position
setting
t
Command in-position ON
(M2403+20n)
OFF
Execution of command in-position check
3 - 12
Execution of command
in-position check
3 POSITIONING DEDICATED SIGNALS
(5) Speed controlling signal (M2404+20n) ........................Status signal
(a) This signal turns on during speed control, and it is used as judgement of
during the speed control or position control.
It is turning on while the switching from speed control to position control by
the external CHANGE signal at the speed/position switching control.
(b) This signal turns off at the power supply on and during position control.
At speed/position switching control
CHANGE
At speed control
Speed control start
At position control
Positioning start
Speed/position control start
t
ON
Speed controlling OFF
signal
(M2404+20n)
Speed
control
Position
control
(6) Speed/position switching latch signal (M2405+20n)
.........................Status signal
(a) This signal turns on when the control is switched from speed control to
position control.
It can be used as an interlock signal to enable or disable changing of the
travel value in position control.
(b) The signal turns off at the following start.
• Position control
• Speed/position control
• Speed control
• JOG operation
• Manual pulse generator operation
CHANGE
Start
Speed/position control start
t
Speed/position switching ON
latch signal(M2405+20n)
OFF
ON
CHANGE signal from
external source
OFF
3 - 13
3 POSITIONING DEDICATED SIGNALS
(7) Zero pass signal (M2406+20n) ....................................Status signal
This signal turns on when the zero point is passed after the power supply on of
the servo amplifier.
Once the zero point has been passed, it remains on state until the Multiple CPU
system has been reset.
However, in the home position return method of proximity dog, count, dog cradle
or limit switch combined type, this signal turns off once at the home position
return start and turns on again at the next zero point passage.
(8) Error detection signal (M2407+20n) ............................Status signal
(a) This signal turns on with detection of a minor error or major error, and it is
used as judgement of the error available/not available.
The applicable error code (Note-1) is stored in the minor error code storage
register with detection of a minor error. (Refer to Section 3.2.1)
The applicable error code (Note-1) is stored in the major error code storage
register with detection of a major error. (Refer to Section 3.2.1)
(b) This signal turns off when the error reset command (M3207+20n) turns on.
Error detection
Error detection signal
(M2407+20n)
OFF
Error reset command
(M3207+20n)
OFF
ON
ON
REMARK
(Note-1): Refer to APPENDIX 1 for the error codes with detection of major/minor
errors.
(9) Servo error detection signal (M2408+20n) ..................Status signal
(a) This signal turns on when an error occurs at the servo amplifier side (except
for errors cause of alarms and emergency stops) (Note-1), and it is used as
judgement of the servo error available/not available.
When an error is detected at the servo amplifier side, the applicable error
code (Note-1) is stored in the servo error code storage register. (Refer to
Section 3.2.1)
(b) This signal turns off when the servo error reset command (M3208+20n)
turns on or the servo power supply turns on again.
Servo error detection
Servo error detection signal OFF
(M2408+20n)
ON
ON
Servo error reset command OFF
(M3208+20n)
3 - 14
3 POSITIONING DEDICATED SIGNALS
REMARK
(Note-1): Refer to APPENDIX 1.4 for the error codes on errors detected at the servo
amplifier side.
(10) Home position return request signal (M2409+20n)
.........................Status signal
This signal turns on when it is necessary to confirm the home position address.
(a) When not using an absolute position system
1) This signal turns on in the following cases:
• Multiple CPU system power supply on or reset
• Servo amplifier power supply on
• Home position return start
(Unless a home position return is completed normally, the home
position return request signal does not turn off.)
2) This signal turns off by the completion of home position return.
(b) When using an absolute position system
1) This signal turns on in the following cases:
• When not executing a home position return once after system start.
• Home position return start
(Unless a home position return is completed normally, the home
position return request signal does not turn off.)
• Erase of an absolute data in Motion CPU according to causes, such
as battery error
• Servo error [2025] (absolute position erase) occurrence
• Servo error [2143] (absolute position counter warning) occurrence
• Major error [1202], [1203], or [1204] occurrence
• When the "rotation direction selection" of servo parameter is
changed.
2) This signal turns off by the completion of the home position return.
CAUTION
When using the absolute position system function, on starting up, and when the Motion
controller or absolute value motor has been replaced, always perform a home position return.
In the case of the absolute position system, use the PLC program to check the home position
return request before performing the positioning operation.
Failure to observe this could lead to an accident such as a collision.
3 - 15
3 POSITIONING DEDICATED SIGNALS
(11) Home position return complete signal (M2410+20n)
.......................Status signal
(a) This signal turns on when the home position return operation using the
servo program has been completed normally.
(b) This signal turns off at the positioning start, JOG operation start and manual
pulse generator operation start.
(c) If the home position return of proximity dog, dog cradle or stopper type
using the servo program is executed during this signal on, the "continuous
home position return start error (minor error: 115)" occurs and it cannot be
start the home position return.
(12) FLS signal (M2411+20n) (Note-1) ...................................Status signal
(a) This signal is controlled by the ON/OFF state for the upper stroke limit
switch input (FLS) of the Q172DLX/servo amplifier.
• Upper stroke limit switch input OFF ...... FLS signal: ON
• Upper stroke limit switch input ON ........ FLS signal: OFF
(b) The state for the upper stroke limit switch input (FLS) when the FLS signal
is ON/OFF is shown below.
(Note-2)
1) Q172DLX use
FLS signal : ON
Q172DLX
FLS
FLS signal : OFF
Q172DLX
FLS
FLS
COM
2) Servo amplifier input use
COM
(Note-3)
FLS signal : ON
MR-J3- B
FLS
FLS
DI1
DICOM
FLS signal : OFF
MR-J3- B
FLS
DI1
DICOM
(Note-1): Refer to the "Q173DCPU/Q172DCPU Motion controller Programming Manual
(COMMON)" for an external signal.
(Note-2): Refer to the "Q173DCPU/Q172DCPU User’s Manual" for a pin configuration.
(Note-3): Refer to the "MR-J3- B Servo Amplifier Instruction Manual" for a pin configuration.
3 - 16
3 POSITIONING DEDICATED SIGNALS
(13) RLS signal (M2412+20n) (Note-1) .................................. Status signal
(a) This signal is controlled by the ON/OFF state for the lower stroke limit
switch input (FLS) of the Q172DLX/servo amplifier.
• Lower stroke limit switch input OFF ...... RLS signal: ON
• Lower stroke limit switch input ON ........ RLS signal: OFF
(b) The state of the lower stroke limit switch input (RLS) when the RLS signal
is ON/OFF is shown below.
(Note-2)
1) Q172DLX use
RLS signal : ON
Q172DLX
RLS
RLS signal : OFF
Q172DLX
RLS
RLS
COM
COM
2) Servo amplifier input use
(Note-3)
RLS signal : ON
MR-J3- B
RLS
RLS
DI2
RLS signal : OFF
MR-J3- B
RLS
DI2
DICOM
DICOM
(Note-1): Refer to the "Q173DCPU/Q172DCPU Motion controller Programming Manual
(COMMON)" for an external signal.
(Note-2): Refer to the "Q173DCPU/Q172DCPU User’s Manual" for a pin configuration.
(Note-3): Refer to the "MR-J3- B Servo Amplifier Instruction Manual" for a pin configuration.
(14) STOP signal (M2413+20n) ........................................Status signal
(a) This signal is controlled by the ON/OFF state for the stop signal input
(STOP) of the Q172DLX.
• Stop signal input of the Q172DLX OFF ..... STOP signal: OFF
• Stop signal input of the Q172DLX ON ....... STOP signal: ON
(b) The state of the stop signal input (STOP) of the Q172DLX when the STOP
signal input is ON/OFF is shown below.
STOP signal : ON
Q172DLX
STOP signal : OFF
Q172DLX
STOP
STOP
STOP
STOP
COM
COM
3 - 17
3 POSITIONING DEDICATED SIGNALS
(15) DOG/CHANGE signal (M2414+20n) (Note-1) ..................Status signal
(a) This signal turns on/off by the proximity dog input (DOG) of the
Q172DLX/servo amplifier at the home position return.
This signal turns on/off by the speed/position switching input (CHANGE) of
the Q172DLX at the speed/position switching control.
(There is no CHANGE signal in the servo amplifier.)
(b) When using the Q172DLX, "Normally open contact input" and "Normally
closed contact input" of the system setting can be selected.
The state of the speed/position switching input (CHANGE) when the
CHANGE signal is ON/OFF is shown below.
(Note-2)
1) Q172DLX use
DOG/CHANGE signal : OFF
Q172DLX
DOG/CHANGE
DOG/CHANGE signal : ON
Q172DLX
DOG/CHANGE
DOG/CHANGE
DOG/CHANGE
COM
COM
2) Servo amplifier input use
(Note-3)
DOG/CHANGE signal : ON
MR-J3- B
DOG/CHANGE
DOG/CHANGE signal : OFF
MR-J3- B
DOG/CHANGE
DI3
DI3
DICOM
DICOM
(Note-1): Refer to the "Q173DCPU/Q172DCPU Motion controller Programming Manual
(COMMON)" for an external signal.
(Note-2): Refer to the "Q173DCPU/Q172DCPU User’s Manual" for a pin configuration.
(Note-3): Refer to the "MR-J3- B Servo Amplifier Instruction Manual" for a pin configuration.
(16) Servo ready signal (M2415+20n) ..............................Status signal
(a) This signal turns on when the servo amplifiers connected to each axis are in
the READY state.
(b) This signal turns off in the following cases.
• M2042 is off
• Servo amplifier is not mounted
• Servo parameter is not set
• It is received the forced stop input from an external source
• Servo OFF by the servo OFF command (M3215+20n) ON
• Servo error occurs
Refer to "APPENDIX 1.4 Servo errors" for details.
3 - 18
3 POSITIONING DEDICATED SIGNALS
Q38DB
Q61P Q03UD Q172D
CPU
CPU
Communication is normal
Servo ready signal : ON
AMP
AMP
M
M
POINT
When the part of multiple servo amplifiers connected to the SSCNET
servo error, only an applicable axis becomes the servo OFF state.
becomes a
(17) Torque limiting signal (M2416+20n) ..........................Status signal
This signal turns on while torque limit is executed.
The signal toward the torque limiting axis turns on
(18) M-code outputting signal (M2419+20n) .....................Status signal
(a) This signal turns during M-code is outputting.
(b) This signal turns off when the stop command, cancel signal, skip signal or
FIN signal are inputted.
M1
M-code
M-code
outputting signal
(M2419+20n)
OFF
FIN signal
(M3219+20n)
OFF
M2
M3
ON
ON
POINTS
(1) The FIN signal and M-code outputting signal are both for the FIN signal wait
function.
(2) The FIN signal and M-code outputting signal are effective only when FIN
acceleration/deceleration is designated in the servo program.
Otherwise, the FIN signal wait function is disabled, and the M-code outputting
signal does not turn on.
3 - 19
3 POSITIONING DEDICATED SIGNALS
3.1.2 Axis command signals
(1) Stop command (M3200+20n) ............................... Command signal
(a) This command is a signal which stop a starting axis from an external source
and becomes effective at leading edge of signal. (An axis for which the stop
command is turning on cannot be started.)
ON
Stop command
(M3200+20n)
OFF
Stop command for
specified axis
V
Setting speed
Control when stop
command turns off
Stop
t
Deceleration stop processing
(b) The details of stop processing when the stop command turns on are shown
below. (Refer to Section 6.13 or 6.14 for details of the speed control.)
Control details
during execution
Processing at the turning stop command on
During control
Positioning control
The axis decelerates to a stop in the
Speed control ( , ) deceleration time set in the parameter
block or servo program.
JOG operation
During deceleration stop processing
The deceleration stop processing is
continued.
Speed control with
fixed position stop
Manual pulse
An immediate stop is executed without
generator operation deceleration processing.
(1) The axis decelerates to a stop in the deceleration time set in the parameter block.
Home position return (2) A "stop error during home position return" occurs and the error code [202] is
stored in the minor error storage register for each axis.
(c) The stop command in a dwell time is invalid. (After a dwell time, the start
accept flag (M2001+n) turns OFF, and the positioning complete signal
(M2401+20n) turns ON.)
POINT
If it is made to stop by turning on the stop command (M3200+20n) during a home
position return, execute the home position return again.
If the stop command is turned on after the proximity dog ON in the proximity dog
type, execute the home position return after move to before the proximity dog ON
by the JOG operation or positioning.
3 - 20
3 POSITIONING DEDICATED SIGNALS
(2) Rapid stop command (M3201+20n) ..................... Command signal
(a) This command stops a starting axis rapidly from an external source and
becomes effective at leading edge of signal. (An axis for which the rapid
stop command is turning on cannot be started.)
ON
Rapid stop command OFF
(M3201+20n)
Rapid stop command
for specified axis
V
Control when rapid
stop command turns off
Setting speed
Stop
t
Rapid stop processing
(b) The details of stop processing when the rapid stop command turns on are
shown below.
Control details
during execution
Processing at the turning rapid stop command on
During control
During deceleration stop processing
Deceleration processing is stopped and
The axis decelerates to a rapid stop
Speed control ( , ) deceleration time set in the parameter rapid stop processing is executed.
block or servo program.
JOG operation
Position control
Speed control with
fixed position stop
Manual pulse
An immediate stop is executed without
generator operation deceleration processing.
(1) The axis decelerates to a stop in the rapid stop deceleration time set in the
parameter block.
Home position return
(2) A "stop error during home position return" error occurs and the error code [203] is
stored in the minor error storage register for each axis.
(c) The rapid stop command in a dwell time is invalid. (After a dwell time, the
start accept flag (M2001+n) turns OFF, and the positioning complete signal
(M2401+20n) turns ON.)
POINT
If it is made to stop rapidly by turning on the rapid stop command (M3201+20n)
during a home position return, execute the home position return again.
If the rapid stop command turned on after the proximity dog ON in the proximity dog
type, execute the home position return after move to before the proximity dog ON
by the JOG operation or positioning.
3 - 21
3 POSITIONING DEDICATED SIGNALS
(3) Forward rotation JOG start command (M3202+20n)/Reverse
rotation JOG start command (M3203+20n) ......... Command signal
(a) JOG operation to the address increase direction is executed while forward
rotation JOG start command (M3202+20n) is turning on.
When M3202+20n is turned off, a deceleration stop is executed in the
deceleration time set in the parameter block.
(b) JOG operation to the address decrease direction is executed while reverse
rotation JOG start command (M3203+20n) is turning on.
When M3203+20n is turned off, a deceleration stop is executed in the
deceleration time set in the parameter block.
POINT
Take an interlock so that the forward rotation JOG start command (M3202+20n)
and reverse rotation JOG start command (M3203+20n) may not turn on
simultaneously.
(4) Complete signal OFF command (M3204+20n)
......................... Command signal
(a) This command is used to turn off the positioning start complete signal
(M2400+20n) and positioning complete signal (M2401+20n).
Dwell time
Positioning start
complete signal
(M2400+20n)
Dwell time
t
ON
OFF
ON
Positioning complete
signal (M2401+20n)
OFF
Complete signal OFF
command (M3204+20n)
OFF
ON
POINT
Do not turn the complete signal OFF command on with a PLS instruction.
If it is turned on with a PLS instruction, it cannot be turned off the positioning start
complete signal (M2400+20n) and the positioning complete signal (M2401+20n).
3 - 22
3 POSITIONING DEDICATED SIGNALS
(5) Speed/position switching enable command (M3205+20n)
......... Command signal
(a) This command is used to make the CHANGE signal (speed/position
switching signal) effective from an external source.
• ON .......... Control switches from speed control to position control when
the CHANGE signal turned on.
• OFF .......... Control does not switch from speed to position control even if
the CHANGE signal turns on.
Control does not switch from
speed control to position control
because M3205+20n turns off
CHANGE
CHANGE
Control switches from
speed control to position
control because
M3205+20n turns on
t
ON
Speed/position switching
OFF
enable command (M3205+20n)
CHANGE signal from
external source
OFF
(6) Error reset command (M3207+20n) ..................... Command signal
This command is used to clear the minor/major error code storage register of an
axis for which the error detection signal has turn on (M2407+20n: ON), and reset
the error detection signal (M2407+20n).
ON
Error detection signal
(M2407+20n)
OFF
Error reset command
(M3207+20n)
OFF
ON
Minor error code storage
register (D6+20n)
**
00
Major error code storage
register (D7+20n)
**
00
** : Error code
(7) Servo error reset command (M3208+20n) ........... Command signal
This command is used to clear the servo error code storage register of an axis
for which the servo error detection signal has turn on (M2408+20n: ON), and
reset the servo error detection signal (M2408+20n).
ON
Servo error detection signal
(M2408+20n)
OFF
Servo error reset command
(M3208+20n)
OFF
ON
Servo error code storage
register
**
00
** : Error code
3 - 23
3 POSITIONING DEDICATED SIGNALS
REMARK
Refer to APPENDIX 1 for details on the minor error code, major error code and
servo error code storage registers.
(8) External stop input disable at start command (M3209+20n)
....................... Command signal
This signal is used to set the external stop signal input valid or invalid.
• ON .......... External stop input is set as invalid, and even axes which stop
input is turning on can be started.
• OFF .......... External stop input is set as valid, and axes which stop input is
turning on cannot be started.
POINT
When it stops an axis with the external stop input after it starts by turning on the
external stop input disable at start command (M3209+20n), switch the external stop
input from OFF ON (if the external stop input is turning on at the starting, switch
it from ON OFF ON).
(9) Feed current value update request command (M3212+20n)
....................... Command signal
This signal is used to set whether the feed current value will be cleared or not at
the starting in speed/position switching control.
• ON .......... The feed current value is updated from the starting.
The feed current value is not cleared at the starting.
• OFF .......... The feed current value is updated from the starting.
The feed current value is cleared at the starting.
POINT
When it starts by turning on the feed current value update request command
(M3212+20n), keep M3212+20n on until completion of the positioning control.
If M3212+20n is turned off on the way, the feed current value may not be reliable.
(10) Servo OFF command (M3215+20n) .................. Command signal
This command is used to execute the servo OFF state (free run state).
• M3215+20n: OFF ..... Servo ON
• M3215+20n: ON ....... Servo OFF (free run state)
This command becomes invalid during positioning, and should therefore be
executed after completion of positioning.
CAUTION
Turn the power supply of the servo amplifier side off before touching a servomotor, such as
machine adjustment.
3 - 24
3 POSITIONING DEDICATED SIGNALS
(11) Gain changing command (M3216+20n) ............. Command signal
This signal is used to change the gain of servo amplifier in the Motion
controller by the gain changing command ON/OFF.
• ON .......... Gain changing command ON
• OFF .......... Gain changing command OFF
Refer to the "MR-J3- B Servo Amplifier Instruction Manual" for details of
gain changing function.
Instruction Manual list is shown below.
Servo amplifier type
MR-J3- B
Instruction manual name
MR-J3- B Servo Amplifier Instruction Manual (SH-030051)
(12) Control loop changing command (M3218+20n)
....................... Command signal
When using the fully closed loop control servo amplifier, this signal is used to
change the fully closed loop control/semi closed loop control of servo
amplifier in the Motion controller by the control loop changing command
ON/OFF.
• ON .......... During fully closed loop control
• OFF .......... During semi closed loop control
Fully closed loop
control change
Control loop
changing command OFF
(M3218+20n)
Control loop
monitor status
(M2272+n)
ON
Semi closed loop
control change
ON
OFF
Refer to the "Fully closed loop control MR-J3- B-RJ006 Servo Amplifier
Instruction Manual" for details of control loop changing.
Instruction Manual list is shown below.
Servo amplifier type
MR-J3- B-RJ006
Instruction manual name
Fully closed loop control MR-J3- B-RJ006
Servo Amplifier Instruction Manual (SH-030056)
POINTS
(1) When the servo amplifier is not started (LED: "AA", "Ab", "AC", "Ad" or "AE"), if
the control loop changing command is turned ON/OFF, the command becomes
invalid.
(2) When the followings are operated during the fully closed loop, it returns to the
semi closed loop control.
(a) Power supply OFF or reset of the Multiple CPU system
(b) Wire breakage of the SSCNET cable between the servo amplifier and
Motion controller
(c) Control circuit power supply OFF of the servo amplifier
3 - 25
3 POSITIONING DEDICATED SIGNALS
(13) FIN signal (M3219+20n) .................................... Command signal
When a M-code is set in a servo program, transit to the next block does not
execute until the FIN signal changes as follows: OFF ON OFF.
Positioning to the next block begins after the FIN signal changes as above.
It is valid, only when the FIN acceleration/deceleration is set and FIN signal
wait function is selected.
Point
<K 0>
Point
1
2
3
4
CPSTART2
Axis
1
Axis
2
Speed
FIN acceleration/
deceleration
ABS-2
Axis
1,
Axis
2,
M-code
ABS-2
Axis
1,
Axis
2,
M-code
ABS-2
Axis
1,
Axis
2,
M-code
ABS-2
Axis
1,
Axis
2,
CPEND
1
M-code
10000
100
200000
200000
10
300000
250000
11
350000
300000
12
400000
400000
WAIT
10
2
11
M-code outputting
signal
(M2419+20n)
FIN signal
(M3219+20n)
Timing Chart for Operation Description
1. When the positioning of point 1 starts, M-code 10 is output and
the M-code outputting signal turns on.
2. FIN signal turns on after performing required processing in the
Motion SFC program. Transition to the next point does not
execute until the FIN signal turns on.
3. When the FIN signal turns on, the M-code outputting signal
turns off.
4. When the FIN signal turns off after the M-code outputting signal
turns off, the positioning to the next point 2 starts.
POINTS
(1) The FIN signal and M-code outputting signal are both signal for the FIN signal
wait function.
(2) The FIN signal and M-code outputting signal are valid only when FIN
acceleration/deceleration is designated in the servo program.
Otherwise, the FIN signal wait function is disabled, and the M-code outputting
signal does not turn on.
3 - 26
3 POSITIONING DEDICATED SIGNALS
3.1.3 Common devices
POINTS
(1) Internal relays for positioning control are not latched even within the latch range.
In this manual, in order to indicate that internal relays for positioning control are
not latched, the expression used in this text is "M2000 to M2319".
(2) The range devices allocated as internal relays for positioning control cannot be
used by the user even if their applications have not been set.
(1) PLC ready flag (M2000) ..............………………… Command signal
(a) This signal informs the Motion CPU that the PLC CPU is normal.
1) The positioning control, home position return, JOG operation or manual
pulse generator operation using the servo program which performs the
Motion SFC program when the M2000 is ON.
2) The above 1) control is not performed even if the M2000 is turned on
during the test mode [TEST mode ON flag (SM501): ON] using
MT Developer.
(b) The setting data such as the fixed parameters, servo parameters and limit
switch output data can be changed using MT Developer when the M2000 is
OFF only.
The above data using MT Developer cannot be written when the M2000 is
ON.
(c) The following processings are performed when the M2000 turns OFF to ON.
1) Processing details
• Clear the M-code storage area of all axes.
• Turn the PCPU READY complete flag (SM500) on. (Motion SFC
program can be executed.)
• Start to execute the Motion SFC program of the automatic starting
from the first.
2) If there is a starting axis, an error occurs, and the processing in above
(c) 1) is not executed.
3 - 27
3 POSITIONING DEDICATED SIGNALS
3) The processing in above (c) 1) is not executed during the test mode.
It is executed when the test mode is cancelled and M2000 is ON.
V
Positioning start
Deceleration stop
t
ON
PLC ready flag OFF
(M2000)
ON
PCPU READY OFF
complete flag
(SM500)
PCPU READY complete flag
(SM500) does not turn on because
during deceleration.
Clear a M-code
(d) The following processings are performed when the M2000 turns ON to
OFF.
1) Processing details
• Turn the PCPU READY complete flag (SM500) off.
• Deceleration stop of the starting axis.
• Stop to execute the Motion SFC program.
• Turn all points of the real output PY off.
(e) Operation setting at STOP RUN
The condition which the PLC ready flag (M2000) turns on is set in the
system setting. Select the following either.
1) M2000 is turned on by switching from STOP to RUN. (Default)
The condition which M2000 turns OFF to ON.
• Move the RUN/STOP switch from STOP to RUN.
• Turn the power supply on where the RUN/STOP switch is moved to
RUN.
The condition which M2000 turns ON to OFF.
• Move the RUN/STOP switch from RUN to STOP.
2) M2000 is turned on by switching from STOP to RUN and setting 1 in the
set register.
(M2000 is turned on by set "1" to the switch RUN setting register.)
The condition which M2000 is turned ON to OFF.
• Set "1" to the setting register D704 of the PLC ready flag where the
RUN/STOP switch is moved to RUN. (The Motion CPU detects the
change of the lowest rank bit 0 1 in D704.)
3 - 28
3 POSITIONING DEDICATED SIGNALS
The condition which M2000 is turned ON to OFF.
• Set "0" to the setting register D704 of the PLC ready flag where the
RUN/STOP switch is moved to RUN. (The Motion CPU detects the
change of the lowest rank bit 1 0 in D704.)
• Move the RUN/STOP switch from RUN to STOP.
(2) Start accept flag (M2001 to M2032) ............................ Status signal
(a) This flag turns on when the servo program is started. The start accept flag
corresponding to an axis specified with the servo program turns on.
(b) The ON/OFF processing of the start accept flag is shown below.
1) When the servo program is started using the Motion SFC program or
Motion dedicated PLC instruction (D(P).SVST), the start accept flag
corresponding to an axis specified with the servo program turns on and
it turns off at the positioning completion. This flag also turns off when it
is made to stopping on the way.
(When it is made to stop on the way by the speed change to speed "0",
this flag remains on.)
Positioning stop during control
Normal positioning completion
V
V
Dwell time
t
Positioning
completion
Servo program start
Positioning
start
Servo program start
ON
ON
Start accept flag
(M2001+n)
OFF
Positioning complete
(M2401+20n)
Positioning start
complete (M2400+20n)
t
Positioning
stop
completion
ON
OFF
Start accept flag
(M2001+n)
OFF
Positioning complete
(M2401+20n)
OFF
Positioning start
complete (M2400+20n)
OFF
ON
2) This flag turns on at the positioning control by turning on the JOG start
command (M3202+20n or M3203+20n), and turns off at the positioning
stop by turning off the JOG start command.
3) This flag turns on during the manual pulse generator enable (M2051 to
M2053: ON), and turns off at the manual pulse generator disable
(M2051 to M2053: OFF).
4) This flag turns on during a current value change by the CHGA
instruction of servo program or Motion dedicated PLC instruction
(D(P).CHGA), and turns off at the completion of the current value
change.
CHGA instruction
ON
Current value changing
processing
Start accept flag OFF
(M2001 to M2032)
3 - 29
Turns off at the completion of
current value change.
3 POSITIONING DEDICATED SIGNALS
The start accept flag list is shown below.
Axis No.
Device No.
Axis No.
Device No.
Axis No.
Device No.
Axis No.
1
M2001
9
M2009
17
M2017
25
Device No.
M2025
2
M2002
10
M2010
18
M2018
26
M2026
3
M2003
11
M2011
19
M2019
27
M2027
4
M2004
12
M2012
20
M2020
28
M2028
5
M2005
13
M2013
21
M2021
29
M2029
6
M2006
14
M2014
22
M2022
30
M2030
7
M2007
15
M2015
23
M2023
31
M2031
8
M2008
16
M2016
24
M2024
32
M2032
(Note): The range of axis No.1 to 8 is valid in the Q172DCPU.
CAUTION
Do not turn the start accept flags ON/OFF in the user side.
• If the start accept flag is turned off using the Motion SFC program or MT Developer while this
flag is on, no error will occur but the positioning operation will not be reliable. Depending on
the type of machine, it might operate in an unanticipated operation.
• If the start accept flag is turned on using the Motion SFC program or MT Developer while this
flag is off, no error will occur but the "start accept on error" will occur at the next starting and
cannot be started.
(3) Motion error history clear request flag (M2035)
.……. Command signal
This flag is used to clear the backed-up Motion error history (#8640 to #8735).
The Motion error history is cleared at leading edge of M2035.
After detection of leading edge of M2035, the Motion error history is cleared, and
then the M2035 is automatically turned OFF.
(4) Motion SFC debugging flag (M2038) ......….............… Status signal
This flag turns on when it switches to the debug mode of the Motion SFC
program using MT Developer.
It turns off with release of the debug mode.
(5) Motion error detection flag (M2039) .....…..…......…… Status signal
This flag turns on with error occurrence of the Motion CPU.
Turn off this flag by the user side, after checking the error contents and removing
the error cause.
The self-diagnosis error information except stop error is cleared at the turning
M2039 ON to OFF.
3 - 30
3 POSITIONING DEDICATED SIGNALS
(6) Speed switching point specified flag (M2040) ...... Command signal
This flag is used when the speed change is specified at the pass point of the
constant speed control.
(a) By turning M2040 on before the starting of the constant speed control
(before the servo program is started), control with the change speed can be
executed from the first of pass point.
• OFF .......... Speed is changed to the specified speed from the pass point
of the constant speed control.
• ON .......... Speed has been changed to the specified speed at the pass
point of the constant speed control.
M2040 OFF
V
t
t
Pass points of the
constant speed control
(When the speed change
is specified with P3.)
Speed switching point
specified flag (M2040)
P1
P2
P3
Pass points of the
constant speed control
(When the speed change
is specified with P3.)
P4
OFF
Speed switching point
specified flag (M2040)
P1
P2
P3
P4
ON
OFF
Servo program start
Servo program start
ON
Start accept flag
(M2001+n)
M2040 ON
V
ON
OFF
Start accept flag
(M2001+n)
OFF
(7) System setting error flag (M2041)................................. Status signal
This flag set the "system setting data" set by MT Developer and performs an
adjustment check with a real mounting state (main base unit/extension base
units) at the power supply on or reset.
• ON .......... Error
• OFF .......... Normal
(a) When an error occurs, the 7-segment LED at the front side of Motion CPU
shows the system setting error.
The error contents can be confirmed using the Motion CPU error batch
monitor of MT Developer.
(b) When M2041 is on, positioning cannot be started. Remove an error factor,
and turn the power supply on again or reset the Multiple CPU system.
REMARK
Even if the module which is not set as the system setting of MT Developer is
installed in the slot, it is not set as the object of an adjustment check. And, the
module which is not set as the system setting cannot be used in the Motion CPU.
3 - 31
3 POSITIONING DEDICATED SIGNALS
(8) All axes servo ON command (M2042) .................. Command signal
This command is used to enable servo operation.
(a) Servo operation enabled … M2042 turns on while the servo OFF command
(M3215+20n) is off and there is no servo error.
(b) Servo operation disable ...... • M2042 is off
• The servo OFF command (M3215+20n) is on
• Servo error state
ON
All axes servo ON command OFF
(M2042)
ON
All axes servo ON accept flag OFF
(M2049)
ON
(Note)
Each axis servo ready state
OFF
(Note): Refer to "3.1.1 Axis statuses "Servo ready signal"" for details.
POINT
When M2042 turns on, it is not turned off even if the CPU is set in the STOP state.
(9) Motion slot fault detection flag (M2047) ....................... Status signal
This flag is used as judgement which modules installed in the motion slot of the
main base unit is "normal" or "abnormal".
• ON .......... Installing module is abnormal
• OFF .......... Installing module is normal
The module information at the power supply on and after the power supply
injection are always checked, and errors are detected.
(a) Perform the disposal (stop the starting axis, servo OFF, etc.) of error
detection using the Motion SFC program.
(10) JOG operation simultaneous start command (M2048)
.……. Command signal
(a) When M2048 turns on, JOG operation simultaneous start based on the
JOG operation execution axis set in the JOG operation simultaneous start
axis setting register (D710 to D713).
(b) When M2048 turns off, the axis during operation decelerates to a stop.
3 - 32
3 POSITIONING DEDICATED SIGNALS
(11) All axes servo ON accept flag (M2049) .................... Status signal
This flag turns on when the Motion CPU accepts the all axes servo ON
command (M2042).
Since the servo ready state of each axis is not checked, confirm it in the servo
ready signal (M2415+20n).
ON
All axes servo ON command
(M2042)
OFF
ON
All axes servo ON accept flag OFF
(M2049)
ON
(Note)
Each axis servo ready state
OFF
(Note): Refer to "3.1.1 Axis statuses "Servo ready signal"" for details.
(12) Manual pulse generator enable flag (M2051 to M2053)
.......... Command signal
This flag set the enabled or disabled state for positioning with the pulse input
from the manual pulse generators connected to P1 to P3 (Note) of the Q173DPX.
• ON .......... Positioning control is executed by the input from the manual pulse
generators.
• OFF .......... Positioning control cannot be executed by the manual pulse
generators because of the input from the manual pulse
generators is ignored.
Default value is invalid (OFF).
REMARK
(Note): Refer to the "Q173DCPU/Q172DCPU User's Manual" for P1 to P3
connector of the Q173DPX.
(13) Operation cycle over flag (M2054) ............................ Status signal
This flag turns on when the time concerning motion operation exceeds the
operation cycle of the Motion CPU setting (SD523). Perform the following
operation, in making it turn off.
• Turn the power supply of the Multiple CPU system on to off
• Reset the Multiple CPU system
• Reset using the user program
[Error measures]
1) Change the operation cycle into a large value in the system setting.
2) The number of instruction completions of an event task or NMI task in
the Motion SFC program.
3 - 33
3 POSITIONING DEDICATED SIGNALS
(14) Speed change accepting flag (M2061 to M2092)
................... Status signal
This flag turns on during speed change by the control change (CHGV)
instruction (or Motion dedicated PLC instruction (D(P).CHGV)) of the Motion
SFC program.
CHGV instruction
ON
Speed change
accepting flag
OFF
0 to 4ms
Speed change
Speed after
speed change
Setting speed
t
Speed change completion
The speed change accepting flag list is shown below.
Axis No.
Device No.
Axis No.
Device No.
Axis No.
Device No.
Axis No.
1
M2061
9
M2069
17
M2077
25
Device No.
M2085
2
M2062
10
M2070
18
M2078
26
M2086
3
M2063
11
M2071
19
M2079
27
M2087
4
M2064
12
M2072
20
M2080
28
M2088
5
M2065
13
M2073
21
M2081
29
M2089
6
M2066
14
M2074
22
M2082
30
M2090
7
M2067
15
M2075
23
M2083
31
M2091
8
M2068
16
M2076
24
M2084
32
M2092
(Note): The range of axis No.1 to 8 is valid in the Q172DCPU.
REMARK
In the SV22 virtual mode, the flag is that of the virtual servomotor axis.
3 - 34
3 POSITIONING DEDICATED SIGNALS
(15) Automatic decelerating flag (M2128 to M2159) ......... Status signal
This signal turns on while automatic deceleration processing is performed
during the positioning control or position follow-up control.
(a) This flag turns on while automatic deceleration to the command address at
the position follow-up control, but it turns off if the command address is
changed.
(b) This signal turns on while automatic deceleration processing is performed
during execution of positioning to final point while in constant speed
control.
V
P1
P2
P3
t
ON
Automatic
decelerating flag
OFF
V
P1
The automatic decelerating flag is turns
on after the execution of positioning to
final point (P3) even if automatic
deceleration processing start while
executing the positioning to P2.
P2
P3
t
ON
Automatic
decelerating flag
OFF
POINT
Set a travel value in which automatic deceleration processing can be started at the
final positioning point, therefore the automatic decelerating flag turns on at the start
point of automatic deceleration processing after this final point.
(c) The signal turns off when all normal start complete commands became
achieve.
3 - 35
3 POSITIONING DEDICATED SIGNALS
(d) In any of the following cases, this flag does not turn off.
• When deceleration due to JOG signal off
• During manual pulse generator operation
• During deceleration due to stop command or stop cause occurrence
• When travel value is 0
V
t
ON
Automatic
decelerating flag
OFF
The automatic decelerating flag list is shown below.
Axis No.
Device No.
Axis No.
Device No.
Axis No.
Device No.
Axis No.
1
M2128
9
M2136
17
M2144
25
Device No.
M2152
2
M2129
10
M2137
18
M2145
26
M2153
3
M2130
11
M2138
19
M2146
27
M2154
4
M2131
12
M2139
20
M2147
28
M2155
5
M2132
13
M2140
21
M2148
29
M2156
6
M2133
14
M2141
22
M2149
30
M2157
7
M2134
15
M2142
23
M2150
31
M2158
8
M2135
16
M2143
24
M2151
32
M2159
(Note): The range of axis No.1 to 8 is valid in the Q172DCPU.
REMARK
In the SV22 virtual mode, the flag is that of the virtual servomotor axis.
3 - 36
3 POSITIONING DEDICATED SIGNALS
(16) Speed change "0" accepting flag (M2240 to M2271)
....………. Status signal
This flag turns on while a speed change request to speed "0" or negative
speed change is being accepted.
It turns on when the speed change request to speed "0" or negative speed
change is accepted during a start. After that, this signal turns off when a speed
change is accepted or on completion of a stop due to a stop cause.
Deceleration stop at the speed change
"0" accept.
Speed change "0"
V
Thereafter, by changing speed to
except "0", it starts continuously.
V1
Speed change V2
V2
t
Start accept flag
ON
Speed change "0"
accepting flag
OFF
Positioning
complete signal
The speed change "0" accepting flag list is shown below.
Axis No.
Device No.
Axis No.
Device No.
Axis No.
Device No.
Axis No.
1
M2240
9
M2248
17
M2256
25
Device No.
M2264
2
M2241
10
M2249
18
M2257
26
M2265
3
M2242
11
M2250
19
M2258
27
M2266
4
M2243
12
M2251
20
M2259
28
M2267
5
M2244
13
M2252
21
M2260
29
M2268
6
M2245
14
M2253
22
M2261
30
M2269
7
M2246
15
M2254
23
M2262
31
M2270
8
M2247
16
M2255
24
M2263
32
M2271
(Note): The range of axis No.1 to 8 is valid in the Q172DCPU.
REMARK
(1) Even if it has stopped, when the start accept flag (M2001 to M2032) is ON state,
the state where the request of speed change "0" is accepted is indicated.
Confirm by this speed change "0" accepting flag.
(2) During interpolation, the flags corresponding to the interpolation axes are set.
(3) In any of the following cases, the speed change "0" request is invalid.
• After deceleration by the JOG signal off
• During manual pulse generator operation
• After positioning automatic deceleration start
• After deceleration due to stop cause
(4) During the SV22 virtual mode, the flag is that of the virtual servomotor axis.
3 - 37
3 POSITIONING DEDICATED SIGNALS
(a) The flag turns off if a speed change request occurs during deceleration to a
stop due to speed change "0".
Speed change "0"
V
V1
Speed change V2
V2
t
Start accept flag
ON
Speed change "0"
accepting flag
OFF
(b) The flag turns off if a stop cause occurs after speed change "0" accept.
Speed change "0"
V
Stop cause
t
Start accept flag
ON
Speed change "0"
accepting flag
OFF
(c) The speed change "0" accepting flag does not turn on if a speed change "0"
occurs after an automatic deceleration start.
Automatic deceleration start
V
Speed change "0"
t
Start accept flag
(OFF)
Speed change "0"
accepting flag
3 - 38
3 POSITIONING DEDICATED SIGNALS
(d) Even if it is speed change "0" after the automatic deceleration start to the
"command address", speed change "0" accepting flag turns on.
Automatic deceleration start
V
Speed change "0"
Command address P1
V1
Speed change V2
V2
Command
address P2
P1
P2
t
Start accept flag
ON
OFF
Speed change "0"
accepting flag
REMARK
It does not start, even if the "command address" is changed during speed change
"0" accepting.
(17) Control loop monitor status (M2272 to M2303)
............................... Command signal
When using the fully closed loop control servo amplifier, this signal is used to
check the fully closed loop control/semi closed loop control of servo amplifier.
• ON .......... During fully closed loop control
• OFF .......... During semi closed loop control
It can be changed the fully closed loop control/semi closed loop control of
servo amplifier in the Motion controller by the control loop changing
command ON/OFF.
Fully closed loop
control change
Control loop
changing command OFF
(M3218+20n)
Control loop
monitor status
(M2272+n)
Semi closed loop
control change
ON
ON
OFF
The Control loop monitor status list is shown below.
Axis No.
Device No.
Axis No.
Device No.
Axis No.
Device No.
Axis No.
1
M2272
9
M2280
17
M2288
25
Device No.
M2296
2
M2273
10
M2281
18
M2289
26
M2297
3
M2274
11
M2282
19
M2290
27
M2298
4
M2275
12
M2283
20
M2291
28
M2299
5
M2276
13
M2284
21
M2292
29
M2300
6
M2277
14
M2285
22
M2293
30
M2301
7
M2278
15
M2286
23
M2294
31
M2302
8
M2279
16
M2287
24
M2295
32
M2303
(Note): The range of axis No.1 to 8 is valid in the Q172DCPU.
3 - 39
3 POSITIONING DEDICATED SIGNALS
3.2 Data Registers
(1) Data register list
SV13
Device No.
SV22
Application
Device No.
D0
to
D640
to
D704
to
D758
to
D0
Axis monitor device
(20 points 32 axes)
to
D640
Control change register
(2 points 32 axes)
to
Common device (Command signal)
(54 points)
D704
to
D758
Unusable
(42 points)
to
D800
D800
to
D1120
to
D1240
to
Application
Axis monitor device
(20 points
32 axes)
Real mode……each axis
Virtual mode….output module
Control change register
(2 points 32 axes)
Common device (Command signal)
(54 points)
Unusable
(42 points)
Virtual servomotor axis monitor
device (Note)
(10 points
32 axes)
(Mechanical system setting axis only)
Synchronous encoder axis monitor
device (Note) (10 points 12 axes)
CAM axis monitor device (Note)
(10 points
32 axes)
D1560
to
User device
(7392 points)
to
User device
(6632 points)
D8191
D8191
Usable in the user device.
(Note): When it is used in the SV22 real mode only, it can be used as an user device.
POINT
• Total number of user device points
(Note)
(SV22)
7392 points (SV13) / 6632 points
(Note): Up to 7272 points can be used when not using it in the virtual mode.
3 - 40
3 POSITIONING DEDICATED SIGNALS
(2) Axis monitor device list
Axis
No.
Device No.
Signal name
1
D0 to D19
2
D20 to D39
3
D40 to D59
4
D60 to D79
0
5
D80 to D99
1
6
D100 to D119
2
7
D120 to D139
3
8
D140 to D159
4
9
D160 to D179
5
10
D180 to D199
6 Minor error code
11
D200 to D219
7 Major error code
12
D220 to D239
8 Servo error code
13
D240 to D259
14
D260 to D279
15
D280 to D299
16
D300 to D319
10 Travel value after
11 proximity dog ON
17
D320 to D339
12 Execute program No.
18
D340 to D359
13 M-code
19
D360 to D379
14 Torque limit value
20
D380 to D399
21
D400 to D419
Data set pointer for
15
constant-speed control
22
D420 to D439
16
23
D440 to D459
17
24
D460 to D479
25
D480 to D499
18 Real current value at
19 stop input
26
D500 to D519
27
D520 to D539
28
D540 to D559
29
D560 to D579
30
D580 to D599
31
D600 to D619
32
D620 to D639
Signal name
9
Refresh cycle
Feed current value
Real current value
Operation cycle
Deviation counter value
Home position return
re-travel value
Fetch cycle
Unit
Signal
direction
Command
unit
PLS
Immediate
Main cycle
PLS
Operation cycle
Monitor
device
Command
unit
At start
Operation cycle
%
At start/during start
Unusable (Note-1)
Operation cycle
Command
unit
Monitor
device
(Note-1): It can be used as the travel value change register. The travel value change register can be set to the device optionally in the
servo program. Refer to Section 6.15 for details.
POINT
(1) The range of axis No.1 to 8 is valid in the Q172DCPU.
(2) The device area more than 9 axes as an user device in the Q172DCPU.
However, when the project of Q172DCPU is replaced with Q173DCPU, this area
cannot be used.
3 - 41
3 POSITIONING DEDICATED SIGNALS
(3) Control change register list
Axis
No.
Device No.
1
D640, D641
2
D642, D643
3
D644, D645
4
D646, D647
0
5
D648, D649
1
6
D650, D651
7
D652, D653
8
D654, D655
9
D656, D657
10
D658, D659
11
D660, D661
12
D662, D663
13
D664, D665
14
D666, D667
15
D668, D669
16
D670, D671
17
D672, D673
18
D674, D675
19
D676, D677
20
D678, D679
21
D680, D681
22
D682, D683
23
D684, D685
24
D686, D687
25
D688, D689
26
D690, D691
27
D692, D693
28
D694, D695
29
D696, D697
30
D698, D699
31
D700, D701
32
D702, D703
Signal name
Signal name
Refresh cycle
Fetch cycle
At start
JOG speed setting
Unit
Signal
direction
Command Command
unit
device
POINT
(1) The range of axis No.1 to 8 is valid in the Q172DCPU.
(2) The device area more than 9 axes as an user device in the Q172DCPU.
However, when the project of Q172DCPU is replaced with Q173DCPU, this area
cannot be used.
3 - 42
3 POSITIONING DEDICATED SIGNALS
(4) Common device list
Device
No.
Signal name
Refresh cycle
Fetch cycle
Signal
direction
Device
No.
Signal name
D704
PLC ready flag request
D752
Manual pulse generator 1
smoothing magnification
setting register
D705
Speed switching point
specified flag request
D753
Manual pulse generator 2
smoothing magnification
setting register
D706
All axes servo ON command
request
D754
Manual pulse generator 3
smoothing magnification
setting register
D707
Real mode/virtual mode
switching request (SV22)
D755
Manual pulse generator 1
enable flag request
D708
JOG operation simultaneous
start command request
D756
Manual pulse generator 2
enable flag request
D757
Manual pulse generator 3
enable flag request
D709
Unusable
Main cycle
—
—
Command
device
—
D710
D711
D712
JOG operation simultaneous
start axis setting register
D764
D766
D719
Manual pulse generator axis
3 No. setting register
D720
Axis 1
D768
D721
Axis 2
D769
D722
Axis 3
D770
D723
Axis 4
D771
D724
Axis 5
D772
D725
Axis 6
D773
D726
Axis 7
D774
D727
Axis 8
D775
D728
Axis 9
D776
D729
Axis 10
D730
Axis 11
D731
Axis 12
D732
Axis 13
D733
Axis 14
D734
Axis 15
D735
Axis 16
D736
Axis 17
D737
Axis 18
D738
Axis 19
D786
D739
Axis 20
D787
D740
Axis 21
D788
D741
Axis 22
D789
D742
Axis 23
D790
D743
Axis 24
D791
D744
Axis 25
D792
D745
Axis 26
D793
D746
Axis 27
D794
D747
Axis 28
D795
D748
Axis 29
D796
D749
Axis 30
D797
D750
Axis 31
D798
D751
Axis 32
D799
D718
Command
device
Main cycle
D760
Manual pulse generator axis
2 No. setting register
D717
At the manual pulse
generator enable flag
D761
D762
D716
Signal
direction
D759
At start
Manual pulse generator axis
1 No. setting register
D715
Fetch cycle
D758
D713
D714
Refresh cycle
D763
D765
D767
D777
Command
device
At the manual pulse
generator enable flag
Manual pulse
generators 1 pulse
input magnification
setting register
(Note-1), (Note-2)
D778
D779
Unusable
(42 points)
—
—
—
D780
D781
D782
D783
D784
D785
(Note-1): The range of axis No.1 to 8 is valid in the Q172DCPU.
(Note-2): Device area of 9 axes or more is unusable in the Q172DCPU.
3 - 43
3 POSITIONING DEDICATED SIGNALS
3.2.1 Axis monitor devices
The monitoring data area is used by the Motion CPU to store data such as the feed
current value during positioning control, the real current value and the deviation
counter value.
It can be used to check the positioning control state using the Motion SFC program.
The user cannot write data to the monitoring data area (except the travel value
change register).
Refer to "APPENDIX 4 Processing Times of the Motion CPU" for the delay time
between a positioning device (input, internal relay and special relay) turning on/off and
storage of data in the monitor data area.
(1) Feed current value storage register (D0+20n, D1+20n)
…..……...…….. Monitor device
(a) This register stores the target address output to the servo amplifier on the
basis of the positioning address/travel value specified with the servo
program.
1) A part for the amount of the travel value from "0" after starting is stored in
the fixed-pitch feed control.
2) The current value from address at the time of starting is stored in the
speed/position switching control.
However, the address at the time of starting varies depending on the
ON/OFF state of the feed current value update command (M3212+20n) at
the start.
• M3212+20n: OFF ..... Resets the feed current value to "0" at the start.
• M3212+20n: ON ..... Not reset the feed current value at the start.
3) "0" is stored during speed control.
(b) The stroke range check is performed on this feed current value data.
(2) Real current value storage register (D2+20n, D3+20n)
....…….. Monitor device
(a) This register stores the real current value which took the droop pulses of the
servo amplifier into consideration to the feed current value.
(b) The "feed current value" is equal to the "real current value" in the stopped
state.
(3) Deviation counter value storage register (D4+20n, D5+20n)
....…….. Monitor device
This register stores the droop pulses read from the servo amplifier.
3 - 44
3 POSITIONING DEDICATED SIGNALS
(4) Minor error code storage register (D6+20n) ............. Monitor device
(a) This register stores the corresponding error code (Refer to APPENDIX 1.2)
at the minor error occurrence. If another minor error occurs after error code
storing, the previous error code is overwritten by the new error code.
(b) Minor error codes can be cleared by an error reset command (M3207+20n).
(5) Major error code storage register (D7+20n) ............. Monitor device
(a) This register stores the corresponding error code (Refer to APPENDIX 1.3)
at the major error occurrence. If another major error occurs after error code
storing, the previous error code is overwritten by the new error code.
(b) Major error codes can be cleared by an error reset command (M3207+20n).
(6) Servo error code storage register (D8+20n) ......... Monitor device
(a) This register stores the corresponding error code (Refer to APPENDIX 1.4)
at the servo error occurrence. If another servo error occurs after error code
storing, the previous error code is overwritten by the new error code.
(b) Servo error codes can be cleared by an error reset command (M3208+20n).
(7) Home position return re-travel value storage register (D9+20n)
....…….. Monitor device
If the position stopped in the position specified with the travel value after
proximity dog ON (Refer to Section 6.23.1) using MT Developer is not zero
point, it made to travel to zero point by re-travel in the Motion CPU. The travel
value (signed) of making it travel to zero point by re-travel at this time is stored.
(Data does not change with the last value in the data setting type.)
The following value is stored according to the number of feedback pulses of the
motor connected.
Number of feedback pulses
Less than 131072[PLS]
131072[PLS] or more, 262144[PLS] or less
More than 262144[PLS]
Storage data
Feedback pulses
1/10 of feedback pulses
1/10000 of feedback pulses
(8) Travel value after proximity dog ON storage register
(D10+20n, D11+20n) ………………………………… Monitor device
(a) This register stores the travel value (unsigned) from the proximity dog ON to
home position return completion after the home position return start.
(b) The travel value (signed) of the position control is stored at the time of
speed/position switching control.
3 - 45
3 POSITIONING DEDICATED SIGNALS
(9) Execute program No. storage register (D12+20n)
....…….. Monitor device
(a) This register stores the starting program No. at the servo program starting.
(b) The following value is stored in the JOG operation and manual pulse
generator operation.
1) JOG operation...................................... FFFF
2) Manual pulse generator operation ...... FFFE
3) Power supply on................................... FF00
(c) When the following control is being executed using MT Developer in the test
mode, FFFD is stored in this register.
• Home position return
(10) M-code storage register (D13+20n) ..........……….. Monitor device
(a) This register stores the M-code (Note) set to the executed servo program at
the positioning start.
If M-code is not set in the servo program, the value "0" is stored.
(b) It does not change except positioning start using the servo program.
(c) The value "0" is stored at leading edge of PLC ready flag (M2000).
REMARK
(Note): Refer to the following sections for M-codes and reading M-codes.
• M-code ......................... Section 7.1
• Reading M-code ........... APPENDIX 2.1
(11) Torque limit value storage register (D14+20n) ...... Monitor device
This register stores the torque limit value imposed on the servo amplifier.
The default value "300[%]" is stored at the power supply of servo amplifier ON.
3 - 46
3 POSITIONING DEDICATED SIGNALS
(12) Data set pointer for constant-speed control (D15+20n)
....…….. Monitor device
This pointer is used in the constant-speed control when specifying positioning
data indirectly and substituting positioning data during operation.
It stores a "point" that indicates which of the values stored in indirect devices has
been input to the Motion CPU when positioning is being repeated by using a
repetition instructions (FOR-TIMES, FOR-ON or FOR-OFF).
Use this pointer in conjunction with the updated data set pointer (controlled by
the user in the Motion SFC program) - which indicates the extent to which the
positioning data has been updated using the Motion SFC program - to confirm
which positioning data is to be updated.
Data set pointer for constant-speed control and updated data set pointer are
described here using the example servo program below.
<K 0>
Pass point
9
*
1
2
3
4
5
6
7
8
*
9
CPSTART2
Axis
Axis
Speed
FOR-TIMES
ABS-2
Axis
Axis
ABS-2
Axis
Axis
ABS-2
Axis
Axis
ABS-2
Axis
Axis
ABS-2
Axis
Axis
ABS-2
Axis
Axis
ABS-2
Axis
Axis
ABS-2
Axis
Axis
NEXT
CPEND
1
2
D3200
Point
1,
2,
D3000
D3002
1,
2,
D3004
D3006
1,
2,
D3008
D3010
1,
2,
D3012
D3014
1,
2,
D3016
D3018
1,
2,
D3020
D3022
1,
2,
D3024
D3026
1,
2,
D3028
D3030
...0
...1
...2
Repetition instructions
FOR-TIMES
FOR-ON
FOR-OFF
NEXT
0, 1, 2, etc., starting from the
first instructions defined by the
above repetition instructions :
...3
...4
...5
...6
...7
The input situation of positioning data to the Motion CPU is shown the next page
by executing the 2-axes constant-speed control using above the servo program
and updating the positioning data in indirect devices D3000 to D3006.
3 - 47
3 POSITIONING DEDICATED SIGNALS
[Input situation of positioning data in the Motion CPU]
Update of data using the Motion SFC program
Positioning data input to the Motion CPU at each point
Positioning point
Updated data
(A)
Updating
Point
Input
Indirect device D
0
(1)
(A)
(B)
2
(2)
(B)
(C)
4
(3)
(C)
(D)
6
(4)
(D)
8
(5)
10
(6)
12
(7)
14
(8)
16
(9)
18 (10)
20 (11)
22 (12)
24 (13)
26 (14)
28 (15)
30 (16)
0
First
positioning
Point 0
1
1
2
3
2
4
5
3
6
7
4
3
2
1
0
(13) (11) (9)
6
(7)
(5)
(3)
(1)
(14) (12) (10) (8)
(6)
(4)
(2)
7
5
4
3
2
1
(15) (13) (11) (9)
(7)
(5)
(3)
(16) (14) (12) (10) (8)
(6)
(4)
4
3
2
(A) (15) (13) (11) (9)
(7)
(5)
(B) (16) (14) (12) (10) (8)
(6)
0
1
6
7
0
5
6
7
5
6
5
4
3
(C)
(A) (15) (13) (11) (9)
(7)
(D)
(B) (16) (14) (12) (10) (8)
Data set pointer for
constant-speed control
Indicates the last
positioning data input
to the Motion CPU.
Each time the
positioning at a point
is completed, the
value increases by
one.
Update data set pointer
4
5
6
7
Second
positioning
Point 0
2
1
(5)
(C)
(A) (15) (13) (11) (9)
(6)
(D)
(B) (16) (14) (12) (10)
3
2
1
(7)
(5)
(C)
(A) (15) (13) (11)
(8)
(6)
(D)
(B) (16) (14) (12)
0
7
0
1
6
7
0
5
6
7
4
5
4
3
2
(9)
(7)
(5)
(C) (A) (15) (13)
(10) (8)
(6)
(D) (B) (16) (14)
6
4
3
2
1
(11) (9)
(7)
(5)
(C)
(A) (15)
(12) (10) (8)
(6)
(D)
(B) (16)
4
3
2
(13) (11) (9)
(7)
(5)
(C)
(A)
(14) (12) (10) (8)
(6)
(D)
(B)
5
6
5
0
1
Indicates the last
positioning data
updated by the Motion
SFC program last time.
The user controls
this pointer in the
Motion SFC program.
7
0
The internal processing shown above is described in the next page.
3 - 48
3 POSITIONING DEDICATED SIGNALS
[Internal processing]
(a) The positioning data ((1) to (14)) of points 0 to 6 is input to the Motion CPU
by the starting. The last point "6" of the input data to be input is stored in the
data set pointer for constant-speed control at this time.
The "6" stored in the data set pointer for constant-speed control indicates
that updating of the positioning data stored in points 0 to 6 is possible.
(b) The positioning data ((A) to (D)) of points 0 to 1 is updated using the Motion
SFC program.
The last point "1" of the positioning data to be rewritten is stored in the
updated data set pointer (which must be controlled by the user in the
Motion SFC program). Updating of positioning data of points 2 to 6 (data (5)
to (14)) remains possible.
(c) On completion of the positioning for point 0, the value in the data set pointer
for constant-speed control is automatically incremented by one to "7".
The positioning data ((1) to (2)) of point 0 is discarded and the positioning
data ((15) to (16)) for point 7 is input to the Motion CPU at this time.
(d) Hereafter, whenever positioning of each point is completed, the positioning
data shifts one place.
The positioning data that can be updated is the data after that indicated by
the updated data set pointer: this is the data which has not yet been input to
the Motion CPU.
Even if the values of the indirect devices D8 and D10 are updated by the
Motion SFC program after the positioning completion of the point 3, the
positioning data of point 2 that is input to the Motion CPU will not be
updated and the second positioning will be executed using the unupdated
data. The data set pointer for constant-speed control has not yet been input
to the Motion CPU, and indicates the positioning data which a user can
update using the Motion SFC program.
POINT
Number of points that can be defined by a repeat instruction
• Create the servo program at least eight points.
• If there are less than eight points and they include pass points of few travel value,
the positioning at each point may be completed, and the data input to the Motion
CPU, before the data has been updated using the Motion SFC program.
• Create a sufficient number of points to ensure that data will not be input before the
Motion CPU has updated the values in the indirect devices.
(13) Real current value at STOP input storage register
(D18+20n, D19+20n) .............……………………... Monitor device
This register stores the real current value at the STOP signal (STOP) input of
the Q172DLX.
3 - 49
3 POSITIONING DEDICATED SIGNALS
3.2.2 Control change registers
This area stores the JOG operation speed data.
Table 3.1 Data storage area for control change list
Name
Axis 1
Axis 2
Axis 3
Axis 4
Axis 5
Axis 6
Axis 7
Axis 8
D641, D640 D643, D642 D645, D644 D647, D646 D649, D648 D651, D650 D653, D652 D655, D654
Axis 9
Axis 10
Axis 11
Axis 12
Axis 13
Axis 14
Axis 15
Axis 16
JOG speed D657, D656 D659, D658 D661, D660 D663, D662 D665, D664 D667, D666 D669, D668 D671, D670
setting
register
Axis 17
Axis 18
Axis 19
Axis 20
Axis 21
Axis 22
Axis 23
Axis 24
D673, D672 D675, D674 D677, D676 D679, D678 D681, D680 D683, D682 D685, D684 D687, D686
Axis 25
Axis 26
Axis 27
Axis 28
Axis 29
Axis 30
Axis 31
Axis 32
D689, D688 D691, D690 D693, D692 D695, D694 D697, D696 D699, D698 D701, D700 D703, D702
(Note): The range of axis No.1 to 8 is valid in the Q172DCPU.
(1) JOG speed setting registers (D640+2n, D641+2n)
....…….. Command device
(a) This register stores the JOG speed at the JOG operation.
(b) Setting range of the JOG speed is shown below.
Unit
Item
JOG speed
mm
inch
degree
Setting range
Unit
Setting range
Unit
Setting range
1 to
600000000
10-2
[mm/min]
1 to
600000000
10-3
[inch/min]
1 to
2147483647
(Note-1) : When the " speed control 10
" 10-2[degree/min] ".
PLS
Unit
(Note-1)
Setting range
10-3
1 to
[degree/min] 2147483647
Unit
[PLS/s]
multiplier setting for degree axis" is set to "valid" in the fixed parameter, the unit is
(c) The JOG speed is the value stored in the JOG speed setting registers at
leading edge of JOG start signal.
Even if data is changed during JOG operation, JOG speed cannot be
changed.
(d) Refer to Section 6.21 for details of JOG operation.
3 - 50
3 POSITIONING DEDICATED SIGNALS
3.2.3 Common devices
(1) Common bit device SET/RST request register (D704 to D708,
D755 to D757) ..…........….................................... Command device
Because cannot be turn on/off in every bit from the PLC CPU, the bit device is
assigned to D register, and each bit device turns on with the lowest rank bit 0 to
1 and each bit device becomes off with 1 to 0.
The details of request register are shown below.
(Refer to Section "3.1.3 Common devices" for the bit device M2000 to M2053.)
Details of the request register
No.
Function
Bit device
Request register
1
PLC ready flag
M2000
D704
2
Speed switching point specified flag
M2040
D705
3
All axes servo ON command
M2042
D706
4
Real mode/virtual mode switching request (SV22)
M2043
D707
5
JOG operation simultaneous start command
M2048
D708
6
Manual pulse generator 1 enable flag
M2051
D755
7
Manual pulse generator 2 enable flag
M2052
D756
8
Manual pulse generator 3 enable flag
M2053
D757
(2) JOG operation simultaneous start axis setting registers (D710 to
D713) ....….……………..….……………………… Command device
(a) These registers set the axis No. and direction which start simultaneously the
JOG operation.
b15
b14
b13
b12
b11
b10
b9
b8
b7
b6
b5
b4
b3
b2
b1
b0
Axis 8
Axis 7
Axis 6
Axis 5
Axis 4
Axis 3
Axis 2
Axis 1
D710
Axis 16 Axis 15 Axis 14 Axis 13 Axis 12 Axis 11 Axis 10 Axis 9
D711
Axis 32 Axis 31 Axis 30 Axis 29 Axis 28 Axis 27 Axis 26 Axis 25 Axis 24 Axis 23 Axis 22 Axis 21 Axis 20 Axis 19 Axis 18 Axis 17
D712
Axis 16 Axis 15 Axis 14 Axis 13 Axis 12 Axis 11 Axis 10 Axis 9
D713
Axis 32 Axis 31 Axis 30 Axis 29 Axis 28 Axis 27 Axis 26 Axis 25 Axis 24 Axis 23 Axis 22 Axis 21 Axis 20 Axis 19 Axis 18 Axis 17
Axis 8
Axis 7
Axis 6
Axis 5
Axis 4
Axis 3
Axis 2
Axis 1
Forward
rotation
JOG
Reverse
rotation
JOG
(Note-1) : Make JOG operation simultaneous start axis setting with 1/0.
1 : Simultaneous start execution
0 : Simultaneous start not execution
(Note-2) : The range of axis No.1 to 8 is valid in the Q172DCPU.
(b) Refer to Section 6.21.3 for details of the JOG operation simultaneous start.
(3) Manual pulse generator axis No. setting registers (D714 to D719)
....…….. Command device
(a) These registers stores the axis No. controlled with the manual pulse
generator.
3 - 51
3 POSITIONING DEDICATED SIGNALS
b15
b14
b13
b12
b11
b10
b9
b8
b7
b6
b5
b4
b3
b2
b1
b0
Axis 8
Axis 7
Axis 6
Axis 5
Axis 4
Axis 3
Axis 2
Axis 1
D714
Axis 16 Axis 15 Axis 14 Axis 13 Axis 12 Axis 11 Axis 10 Axis 9
D715
Axis 32 Axis 31 Axis 30 Axis 29 Axis 28 Axis 27 Axis 26 Axis 25 Axis 24 Axis 23 Axis 22 Axis 21 Axis 20 Axis 19 Axis 18 Axis 17
D716
Axis 16 Axis 15 Axis 14 Axis 13 Axis 12 Axis 11 Axis 10 Axis 9
D717
Axis 32 Axis 31 Axis 30 Axis 29 Axis 28 Axis 27 Axis 26 Axis 25 Axis 24 Axis 23 Axis 22 Axis 21 Axis 20 Axis 19 Axis 18 Axis 17
D718
Axis 16 Axis 15 Axis 14 Axis 13 Axis 12 Axis 11 Axis 10 Axis 9
D719
Axis 32 Axis 31 Axis 30 Axis 29 Axis 28 Axis 27 Axis 26 Axis 25 Axis 24 Axis 23 Axis 22 Axis 21 Axis 20 Axis 19 Axis 18 Axis 17
P1
Axis 8
Axis 7
Axis 6
Axis 5
Axis 4
Axis 3
Axis 2
Axis 1
P2
Axis 8
Axis 7
Axis 6
Axis 5
Axis 4
Axis 3
Axis 2
Axis 1
P3
(Note-1) : Make the axis No. controlled with the manual pulse generator
setting with 1/0.
1 : Specified axis
0 : Unspecified axis
(Note-2) : The range of axis No.1 to 8 is valid in the Q172DCPU.
(b) Refer to Section 6.22 for details of the manual pulse generator operation.
(4) Manual pulse generator 1-pulse input magnification setting
registers (D720 to D751) ..................................... Command device
(a) These register set the magnification (1 to 10000) per pulse of number of the
input pulses from manual pulse generator at the pulse generator operation.
1-pulse input
magnification
1-pulse input
Axis No.
Setting range
setting register
magnification
Axis No.
Setting range
setting register
D720
Axis 1
D736
Axis 17
D721
Axis 2
D737
Axis 18
D722
Axis 3
D738
Axis 19
D723
Axis 4
D739
Axis 20
D724
Axis 5
D740
Axis 21
D725
Axis 6
D741
Axis 22
D726
Axis 7
D742
Axis 23
D727
Axis 8
D743
Axis 24
D728
Axis 9
D744
Axis 25
D729
Axis 10
D745
Axis 26
D730
Axis 11
D746
Axis 27
D731
Axis 12
D747
Axis 28
D732
Axis 13
D748
Axis 29
D733
Axis 14
D749
Axis 30
D734
Axis 15
D750
Axis 31
D735
Axis 16
D751
Axis 32
1 to 10000
1 to 10000
(Note-1): The range of axis No.1 to 8 is valid in the Q172DCPU.
(b) Refer to Section 6.22 for details of the manual pulse generator operation.
3 - 52
3 POSITIONING DEDICATED SIGNALS
(5) Manual pulse generator smoothing magnification setting registers
(D752 to D754) .................................................... Command device
(a) These registers set the smoothing time constants of manual pulse
generators.
Manual pulse generator smoothing
Setting range
magnification setting register
Manual pulse generator 1 (P1): D752
0 to 59
Manual pulse generator 2 (P1): D753
Manual pulse generator 3 (P1): D754
(b) When the smoothing magnification is set, the smoothing time constant is as
indicated by the following expression.
Smoothing time constant (t) = (smoothing magnification + 1) 56.8 [ms]
(c) Operation
Manual pulse
generator input
ON
Manual pulse generator OFF
enable flag (M2051)
V
V1
t
t
t
t
Output speed (V1) [PLS/s] = (Number of input pulses/s) (Manual pulse
generator 1-pulse input magnification setting)
Travel value (L) =
(Travel value Number of
×
per pulse)
input pulses
(Manual pulse generator 1-pulse
input magnification setting)
REMARK
(1) The travel value per pulse of the manual pulse generator is shown below.
:0.1[µm]
• Setting unit
mm
inch
:0.00001[inch]
degree :0.00001[degree]
PLS
:1[PLS]
(2) The smoothing time constant is 56.8[ms] to 3408[ms].
3 - 53
3 POSITIONING DEDICATED SIGNALS
3.3 Motion Registers (#)
There are motion registers (#0 to #8735) in the Motion CPU. #8000 to #8639 are used
as the monitor device and #8640 to #8735 are used as the Motion SFC dedicated
device.
Refer to the "Q173DCPU/Q172DCPU Motion Controller (SV13/SV22) Programming
Manual (Motion SFC)" for details of the motion registers and Motion SFC dedicated
device.
(1) Monitor devices (#8000 to #8639)
Information for each axis is stored in the monitor devices.
The details of the storage data are shown below.
Axis
No.
Device No.
1
#8000 to #8019
2
#8020 to #8039
3
#8040 to #8059
4
#8060 to #8079
0
Servo amplifier type
5
#8080 to #8099
1
Motor current
6
#8100 to #8119
2
7
#8120 to #8139
3
8
#8140 to #8159
4
9
#8160 to #8179
5
10
#8180 to #8199
6
11
#8200 to #8219
7
12
#8220 to #8239
8
13
#8240 to #8259
9
14
#8260 to #8279
10
15
#8280 to #8299
11
16
#8300 to #8319
12
17
#8320 to #8339
13
18
#8340 to #8359
14
19
#8360 to #8379
15
20
#8380 to #8399
16
21
#8400 to #8419
17
22
#8420 to #8439
18
23
#8440 to #8459
19
24
#8460 to #8479
25
#8480 to #8499
26
#8500 to #8519
27
#8520 to #8539
28
#8540 to #8559
29
#8560 to #8579
30
#8580 to #8599
31
#8600 to #8619
32
#8620 to #8639
Signal name
Signal name
Motor speed
Refresh cycle
Signal direction
When the servo amplifier power-on
Operation cycle 1.7[ms] or less: Operation cycle
Operation cycle 3.5[ms] or more: 3.5[ms]
Monitor device
Command speed
Operation cycle
Home position return re-travel
At home position return re-travel
value
Unusable
3 - 54
3 POSITIONING DEDICATED SIGNALS
(a) Servo amplifier type (#8000+20n) .......................................... Monitor device
This register stores the servo amplifier type for each axis at the servo
amplifier power supply ON.
• 0 .............. Unused
• 256 ........... MR-J3-B
• 257 ........... MR-J3-B (For fully closed loop control)
• 258 ........... MR-J3-B (For Linear control)
It is not cleared even if the servo amplifier power supply turns ON.
(b) Motor current (#8001+20n) ..................................................... Monitor device
This register stores the motor current ( 0.1[%] ) read from the servo
amplifier.
(c) Motor speed (#8002+20n, #8003+20n) .................................. Monitor device
This register stores the motor speed ( 0.1[r/min] ) read from the servo
amplifier.
(d) Command speed (#8004+20n, #8005+20n)........................... Monitor device
This register stores the speed at which command value to the servo
amplifier for every operation cycle is converted into [PLS/s].
(e) Home position return re-travel value (#8006+20n, #8007+20n)
.................... Monitor device
If the position stopped in the position specified with the travel value after
proximity dog ON (Refer to Section 6.23.1) using MT Developer is not zero
point, it made to travel to zero point by re-travel in the Motion CPU. The
travel value (signed) of making it travel to zero point by re-travel at this time
is stored.
(Data does not change with the last value in the data setting type.)
3 - 55
3 POSITIONING DEDICATED SIGNALS
3.4 Special Relays (SM)
There are 2256 special relay points of SM0 to SM2255 in the Motion CPU.
Of these, 8 points of the SM500 to SM503, SM510, SM512, SM513 and SM516 are
used for the positioning control.
The special relay list used for the positioning control is shown below.
(Refer to "Q173DCPU/Q172DCPU Motion controller programming Manual
(COMMON)" for the application of special relays except SM500 to SM503, SM510,
SM512, SM513 and SM516.)
Table 3.2 Special relay list
Device No.
SM500
Signal name
Refresh cycle
Fetch cycle
Signal type
PCPU REDAY complete flag
SM501
TEST mode ON flag
SM502
External forced stop input flag
SM503
Digital oscilloscope executing flag
SM510
TEST mode request error flag
SM512
Motion CPU WDT error flag
SM513
Manual pulse generator axis setting error flag
SM516
Servo program setting error flag
Main cycle
Status signal
(1) PCPU REDAY complete flag (SM500) ………............ Status signal
This flag is used as judgement of the normal or abnormal in the Motion CPU
side using the PLC program.
(a) The fixed parameters, servo parameters and limit switch output data are
checked at leading edge of PLC ready flag (M2000), and if error is not
detected, this flag turns on.
The servo parameters are written to the servo amplifiers and the M-codes
are cleared.
(b) This flag turns off when the PLC ready flag (M2000) turns off.
PLC ready flag
(M2000)
t
PCPU READY
complete flag
(SM500)
The servo parameters are
written to the servo amplifiers
and the M-codes are cleared.
3 - 56
3 POSITIONING DEDICATED SIGNALS
(2) TEST mode ON flag (SM501) ........…...................... Status signal
(a) This flag is used as judgement of during the test mode or not using
MT Developer.
Use it for an interlock, etc. at the starting of the servo program using the
Motion SFC program.
• OFF ......... Except the test mode
• ON ......... During the test mode
(b) If the test mode is not executed in the test mode request from
MT Developer, the TEST mode request error flag (SM510) turns on.
(3) External forced stop input flag (SM502) ....………… Status signal
This flag is used to check the external forced stop input signal ON/OFF.
• OFF ........ External forced stop input ON
• ON ........ External forced stop input OFF
POINTS
(1) If the forced stop signal is input during positioning, the feed current value is
advanced within the rapid stop deceleration time set in the parameter block. At
the same time, the servo OFF state is established because the all axes servo
ON command (M2042) turns off.
When the rapid stop deceleration time has elapsed after input of the forced stop
signal, the feed current value returns to the value at the point when the
emergency stop was initiated.
(2) If the forced stop is reset before the emergency stop deceleration time has
elapsed, a servo error occurs.
(4) Digital oscilloscope executing flag (SM503) .……...... Status signal
This flag is used to check the state of execution for the digital oscilloscope.
• 0 ........ Digital oscilloscope has stopped.
• 1 ........ Digital oscilloscope is executing.
(5) TEST mode request error flag (SM510) .........………. Status signal
(a) This flag turns on when the test mode is not executed in the test mode
request using MT Developer.
(b) When SM510 turns on, the error contents are stored in the test mode
request error information (SD510, SD511).
(6) Motion CPU WDT error flag (SM512) ......................... Status signal
This flag turns on when a "watchdog timer error" is detected of the Motion CPU
self-diagnosis function.
When the Motion CPU detects a WDT error, it executes an immediate stop
without deceleration of the operating axes.
If the Motion CPU WDT error flag has turn on, reset the Multiple CPU system.
If SM512 remains on after resetting, there is a fault at the Motion CPU side.
The error cause is stored in the "Motion CPU WDT error cause (SD512)".
(Refer to Section 3.5).
3 - 57
3 POSITIONING DEDICATED SIGNALS
(7) Manual pulse generator axis setting error flag (SM513)
.………...... Status signal
(a) This flag is use as judgement of normal or abnormal setting of the manual
pulse generator axis No. setting registers (D714 to D719).
• OFF ......... D714 to D719 is normal
• ON ......... D714 to D719 is abnormal
(b) When SM513 turns on, the error contents are stored in the manual pulse
generator axis setting error information (SD513 to SD515).
(8) Servo program setting error flag (SM516) ...........…... Status signal
This flag is used as judgement of normal or abnormal for the servo program
positioning data.
• OFF ...... Normal
• ON ...... Abnormal
3 - 58
3 POSITIONING DEDICATED SIGNALS
3.5 Special Registers (SD)
There are 2256 special register points of SD0 to SD2255 in the Motion CPU.
Of these, 20 points of the SD200, SD500 to SD506, SD508, SD510 to SD517, SD522,
SD523 and SD803 are used for the positioning control.
The special register list used for the positioning control is shown below.
(Refer to the "Q173DCPU/Q172DCPU Motion controller Programming Manual
(COMMON)" for the applications of special registers except SD200, SD500 to SD506,
SD508, SD510 to SD517, SD522, SD523 and SD803.)
Table 3.3 Special register list
Device No.
SD200
SD500
SD501
SD502
SD503
SD504
SD505
SD506
SD508
SD510
SD511
SD512
SD513
SD514
SD515
Signal name
Refresh cycle
Fetch cycle
Signal direction
State of switch
Main cycle
Real mode axis information register (SV22)
Servo amplifier loading information
Real mode/virtual mode switching error
information (SV22)
At power supply on/
operation cycle
At virtual mode transition
Connect/disconnect (status)
Test mode request error information
Motion CPU WDT error cause
Manual pulse generator axis setting error
information
SD516
Error program No.
SD517
Error item information
SD522
Motion operation cycle
SD523
Operation cycle of the Motion CPU setting
SD803
Connect/disconnect (command)
Main cycle
Monitor device
At test mode request
At Motion CPU
WDT error occurrence
At the manual pulse generator
enable flag
At start
Operation cycle
At power supply on
Main cycle
3 - 59
Command device
3 POSITIONING DEDICATED SIGNALS
(1) State of switch (SD200) ………………………….. Monitor device
The switch state of CPU is stored in the form of the following.
b15
b14
b13
b12
b11
b10
b9
b8
b7
b6
b5
b4
b3
b2
b1
b0
SD200
Switch state of CPU
0 : RUN
1 : STOP
Memory card switch
Always OFF
(All setting of each digit is "0".)
No used
(2) Real mode axis information register (SD500, SD501)
.................................................... Monitor device
This signal is used to store the information used as a real mode axis at the time
of switching from real mode to virtual mode.
The real mode axis information does not change at the time of switching from
virtual mode to real mode.
b15
b14
b13
b12
b11
b10
b9
b8
b7
b6
b5
b4
b3
b2
b1
b0
Axis 8
Axis 7
Axis 6
Axis 5
Axis 4
Axis 3
Axis 2
Axis 1
SD500
Axis 16 Axis 15 Axis 14 Axis 13 Axis 12 Axis 11 Axis 10 Axis 9
SD501
Axis 32 Axis 31 Axis 30 Axis 29 Axis 28 Axis 27 Axis 26 Axis 25 Axis 24 Axis 23 Axis 22 Axis 21 Axis 20 Axis 19 Axis 18 Axis 17
Real mode axis information
0 : Real mode axis
1 : Except real mode axis
(Note-1): The range of axis No.1 to 8 is valid in the Q172DCPU.
(Note-2): Refer to APPENDIX of the "Q173DCPU/Q172DCPU Motion controller (SV22)
Programming Manual (VIRTUAL MODE)" for the expression method of the axis
number corresponding to each bit of word data.
(3) Servo amplifier loading information (SD502, SD503)
........... Monitor device
The mounting status of the servo amplifier is checked at the power supply on or
reset of the Multiple CPU system and its results are stored in this device.
If communication with servo amplifier stops, it is reset.
The mounting status of changed axis after the power supply on is stored.
b15
b14
b13
b12
b11
b10
b9
b8
b7
b6
b5
b4
b3
b2
b1
b0
Axis 8
Axis 7
Axis 6
Axis 5
Axis 4
Axis 3
Axis 2
Axis 1
SD502
Axis 16 Axis 15 Axis 14 Axis 13 Axis 12 Axis 11 Axis 10 Axis 9
SD503
Axis 32 Axis 31 Axis 30 Axis 29 Axis 28 Axis 27 Axis 26 Axis 25 Axis 24 Axis 23 Axis 22 Axis 21 Axis 20 Axis 19 Axis 18 Axis 17
(Note): The range of axis No.1 to 8 is valid in the Q172DCPU.
3 - 60
Servo amplifier mounting status
Mounted. . . . . . . . 1
Not mounted. . . . 0
3 POSITIONING DEDICATED SIGNALS
(a) Servo amplifier mounting status
1) Mounting status
• Mounted ..…..... The servo amplifier is normal. (Communication with
the servo amplifier is normal.)
• Not mounted .... The servo amplifier is not mounted.
The servo amplifier power is off.
Normal communication with the servo amplifier is
not possible due to a connecting cable fault, etc.
2) The system settings and servo amplifier mounting status are shown
below.
Servo amplifier
System Settings
Used (axis No. setting)
Mounted
Not mounted
1 is stored
0 is stored
Unused
0 is stored
(4) Connect/disconnect (status) (SD508) ...................... Monitor device
This signal is used to temporarily suspend SSCNET communication while servo
amplifiers and/or SSCNET cables after Axis 1 are exchanged with the power
supply ON in a Multiple CPU system.
SD508 stores the command status for "accept waiting" or "execute waiting"
during this process.
• 0 ………… Connect/disconnect command accept waiting
• -1 ……….. Connect/disconnect execute waiting
• -2 ………... Connect/disconnect executing
Refer to the "Q173DCPU/Q172DCPU Motion controller programming Manual
(COMMON)" for details of the connect/disconnect function.
(5) Test mode request error information (SD510, SD511)
........... Monitor device
If there are operating axis at a test mode request using MT Developer, a test
mode request error occurs, the test mode request error flag (SM510) turns on,
and the during operation/stop data of the each axis are stored.
b15
b14
b13
b12
b11
b10
b9
b8
b7
b6
b5
b4
b3
b2
b1
b0
Axis 8
Axis 7
Axis 6
Axis 5
Axis 4
Axis 3
Axis 2
Axis 1
SD510
Axis 16 Axis 15 Axis 14 Axis 13 Axis 12 Axis 11 Axis 10 Axis 9
SD511
Axis 32 Axis 31 Axis 30 Axis 29 Axis 28 Axis 27 Axis 26 Axis 25 Axis 24 Axis 23 Axis 22 Axis 21 Axis 20 Axis 19 Axis 18 Axis 17
(Note): The range of axis No.1 to 8 is valid in the Q172DCPU.
3 - 61
Stores the during operation/stop
data of each axis
0 : During stop
1 : During operation
3 POSITIONING DEDICATED SIGNALS
(6) Motion CPU WDT error cause (SD512) ………........ Monitor device
This register is used as judgement of the error contents in the Motion CPU.
Error code
1
Operation when error
occurs
Error cause
S/W fault 1
Action to take
• Reset the Multiple CPU system.
• If the error reoccurs after resetting,
1) Change the operation cycle into a
large value in the system setting.
2) Reduce the number of command
execution of the event task or NMI
task in the system setting.
Operation cycle time over
2
Q bus WDT error
• Reset the Multiple CPU system.
• If the error reoccurs after resetting, the
relevant module or the relevant slot
(base unit) is probably faulty: replace
the module/base unit.
WDT error
• Reset the Multiple CPU system.
• If the error reoccurs after resetting,
explain the error symptom and get
advice from our sales representative.
Q bus H/W fault
• Reset the Multiple CPU system.
• If the error reoccurs after resetting, the
relevant module or the relevant slot
(base unit) is probably faulty: replace
the module/base unit.
3
4
201
Error contents
01 : Q bus error 1
02 : Q bus error 2
04 : Q bus error 4
08 : Q bus error 8
201 to 215
All axes stop immediately,
after which operation
cannot be started.
Error code = Total of the error contents + 200
Servo amplifier interface H/W fault
250
Faulty SSCNET No.
0 : SSCNET 1
1 : SSCNET 2
250 to 253
Error code = Total of the faulty SSCNET No. + 250
S/W fault 3
• Reset the Multiple CPU system.
• If the error reoccurs after resetting,
explain the error symptom and get
advice from our sales representative.
8 or more points of CPSTART instruction were used
to start programs in excess of simultaneously
startable program.
• Reset the Multiple CPU system.
• Use 8 or more points of CPSTART
instruction to start programs within the
number of simultaneously startable
programs.
300
301
Number of simultaneous startable programs
14
303
• Reset the Multiple CPU system.
• If the error reoccurs after resetting,
explain the error symptom and get
advice from our sales representative.
S/W fault 4
3 - 62
3 POSITIONING DEDICATED SIGNALS
(7) Manual pulse generator axis setting error information
(SD513 to SD515) ..............................................….. Monitor device
The setting information is checked at leading edge of manual pulse generator
enable signal, if an error is found, the following error information is stored into
SD513 to SD515 and the manual pulse generator axis setting error flag (SM513)
turns on.
SD513
b15
b14
b13
b12
b11
b10
b9
b8
b7
b6
b5
b4
b3
b2
b1
b0
0
0
0
0
0
0
0
0
0
0
P3
P2
P1
P3
P2
P1
Store the axis setting errors of the manual pulse
generators connected to P1 to P3 of Q173DPX.
0 : Normal
1 : Setting error
(Axis setting in each digit is except 1 to 32)
Store the smoothing magnification setting errors
of the manual pulse generators connected to P1
to P3 of Q173DPX.
0 : Normal
1 : Setting error
(Axis setting in each digit is except 0 to 59)
All turn to 0.
SD514
Axis 16 Axis 15 Axis 14 Axis 13 Axis 12 Axis 11 Axis 10 Axis 9
SD515
Axis 32 Axis 31 Axis 30 Axis 29 Axis 28 Axis 27 Axis 26 Axis 25 Axis 24 Axis 23 Axis 22 Axis 21 Axis 20 Axis 19 Axis 18 Axis 17
Axis 8
Axis 7
Axis 6
Axis 5
Axis 4
Axis 3
Axis 2
Axis 1
Store the 1-pulse input magnification setting
errors of the axis.
0 : Normal
1 : Setting error
(Input magnification of each axis is except
1 to 10000.)
(Note-1): The range of axis No.1 to 8 is valid in the Q172DCPU.
(8) Error program No. (SD516) .................……….......... Monitor device
(a) When the servo program error occurs at the servo program operation, the
servo program setting error flag (SM516) turns on and the error servo
program No. (0 to 4095).
(b) If an error occurs in another servo program when error program No. has
been stored, the program No. of the new error is stored.
(9) Error item information (SD517) ..........………......... Monitor device
When the servo program error occurs at the servo program operation, the servo
program setting error flag (SM516) turns on and the error code corresponds to
the error setting item is stored.
Refer to APPENDIX 1.1 for details of servo program setting errors.
(10) Motion operation cycle (SD522) ….……..………. Monitor device
The time which motion operation took for every motion operation cycle is stored
in [µs] unit.
3 - 63
3 POSITIONING DEDICATED SIGNALS
(11) Operation cycle of the Motion CPU setting (SD523)
........... Monitor device
The setting operation cycle is stored in [µs] unit.
When the "Automatic setting" is set in the system setting, the operation cycle
corresponding to the number of setting axes. When "0.4[ms] / 0.8[ms] / 1.7[ms] /
3.5[ms] / 7.1[ms] / 14.2[ms]" is set in the system setting, the operation cycle
corresponding to each setting.
(Note): If the servo amplifiers of 9 axes or more are connected to one SSCNET
system, it does not support an operation cycle of 0.4[ms]. 0.8[ms] is used
as the real operation cycle, even if 0.4[ms] is set in the system setting.
(12) Connect/disconnect (command) (SD803)
……………………..…… Command device
This signal is used to temporarily suspend SSCNET communication while servo
amplifiers and/or SSCNET cables after Axis 1 are exchanged with the power
supply ON in a Multiple CPU system.
SD803 is required for connect/disconnect during this process.
• 1 to 32… Disconnect command
• -10 …….. Re-connect command
• -2 ………... Connect/disconnect execute command
Refer to the "Q173DCPU/Q172DCPU Motion controller Programming Manual
(COMMON)" for details of the connect/disconnect function.
3 - 64
4 PARAMETERS FOR POSITIONING CONTROL
4. PARAMETERS FOR POSITIONING CONTROL
4.1 System Settings
In the Multiple CPU system, the common system parameters and individual
parameters are set for each CPU and written to each CPU.
(1) The base settings, Multiple CPU settings and Motion slot settings are set in the
common system parameter setting.
(2) The system basic setting, self CPU installation position setting, servo amplifier
setting, high-speed read setting and optional data monitor setting are set in the
individual parameter setting.
(3) The data setting and correction can be performed in dialog form using
MT Developer.
(Refer to the "Q173DCPU/Q172DCPU Motion Controller Programming Manual
(COMMON)" for details of the setting contents.)
4-1
4
4 PARAMETERS FOR POSITIONING CONTROL
4.2 Fixed Parameters
(1) The fixed parameters are set for each axis and their data is fixed based on the
mechanical system, etc.
(2) The fixed parameters are set using MT Developer.
(3) The fixed parameters to be set are shown in Table 4.1.
Table 4.1 Fixed parameter list
Setting range
No.
Item
mm
inch
degree
2
3
Unit setting
Travel value per pulse (A)
1
0
1
Initial value Units
PLS
Setting range Units Setting range Units Setting range Units
2
3
1 to 2147483647[PLS]
rotation
20000
(AP)
• Set the travel value per motor
based on the mechanical
system.
Travel
value per
rotation
0.1 to
0.00001 to
0.00001 to
1 to
214748364.7
21474.83647
21474.83647
2147483647
20000
• Set the backlash amount of
the machine.
• Every time of the positioning
direction changes at the
positioning, compensation by
the backlash compensation
amount is executed.
The expression below shows
the setting range.
0 (backlash compensation
amount) × AP/AL 65535
compensation
0 to 6553.5
0 to 0.65535
0 to 0.65535
0 to 65535
0
amount (Note)
PLS
5
6
Upper stroke
limit
(Note)
(Note)
Command in7
-214748364.8
to
214748364.7
Lower stroke
limit
position range
(Note)
-21474.83648
µm
to
21474.83647
-214748364.8
-21474.83648
to
to
214748364.7
21474.83647
inch
-2147483648
0 to
359.99999
to
degree
PLS 2147483647
2147483647
-2147483648
0 to
359.99999
to
0
2147483647
0.1 to
0.00001 to
0.00001 to
1 to
214748364.7
21474.83647
359.99999
2147483647
100
Speed control
8
4.2.1
(AL)
Backlash
4
Section
• Set the command value for
each axis at the positioning
control.
• Set the number of feedback
pulses per motor rotation
based on the mechanical
system.
3
Number of
pulses per
Remarks
Setting range Units
10 multiplier
setting for
Invalid/Valid
Invalid
degree axis
• Set the upper limit for the
machine travel range. The
expression below shows the
setting range.
(SV13 only) -2147483648
(upper stroke limit value) ×
AP/AL 2147483647
• Set the lower limit for the
machine travel range. The
expression below shows the
setting range.
(SV13 only) -2147483648
(lower stroke limit value) ×
AP/AL 2147483647
• Set the position at which the
command in-position signal
(M2403+20n) turns on
[(positioning address) (current value)].
The expression below shows
the setting range.
1 (command in-position
range) × AP/AL 32767
• Set whether the positioning
control is executed with a
value 10 multiplier the speed
of a command speed setting,
when a control unit is degree
axis.
7.2
4.2.3
4.2.4
4.2.5
(Note): The display of the possible setting range changes according to the electronic gear value.
4-2
4 PARAMETERS FOR POSITIONING CONTROL
4.2.1 Number of pulses/travel value per rotation
The "Electronic gear function" adjusts the pulse calculated and output by the parameter
set in the Q173DCPU/Q172DCPU and the real travel value of machine.
It is defined by the "Number of pulses per rotation" and "Travel value per revolution".
POINTS
(1) The mechanical system error of the command travel value and real travel value
is rectified by adjustment the "electronic gear".
(2) The value of less than 1 pulse that cannot be execute a pulse output when the
machine travels is incremented in the Q173DCPU/Q172DCPU, and a total
incremented pulse output is performed when the total incremented value
becomes more than 1 pulse.
(3) The total incremented value of less than 1 pulse that cannot be execute a pulse
output is cleared and it is referred to as "0" at the home position return
completion, current value change completion, speed-switching control start
(except the feed current value update) and fixed-pitch feed control start. (When
the total incremented value is cleared, the error occurs to the feed machine
value only a part to have been cleared.)
(1) Number of pulses/travel value per rotation
Number of pulses (AP)/travel value (AL) per rotation is an item which determines
how many rotations (number of pulses per rotation) of the servomotor in order to
make it a machine as the travel value ordered by the program.
The position control toward the servomotor is controlled with the number of
feedback pulses of the encoder connected to the servomotor in the servo
amplifier.
The control content of the Motion CPU is shown below.
Q173DCPU/Q172DCPU
Command Control
units
value
AP
AL
Reduction gear
PLS
PLS Servo amplifier
Machine
M
ENC
PLS
Feedback pulse
Fig. 4.1 Control content of the Motion CPU
For example, suppose that the servomotor was connected to the ball screw.
Because the travel value ( S) of machine per motor rotation is [mm] / [inch] unit,
the travel value (positioning address) set in the program is commanded in [mm] /
[inch] unit. However, the servomotor is positioning controlled by the servo
amplifier in pulse unit.
4-3
4 PARAMETERS FOR POSITIONING CONTROL
Therefore, AP/AL is set so that the following expression of relations may be
materialized in order to convert the travel value of [mm] / [inch] unit set in the
program into a pulse.
Number of pulses per motor rotation = AP
Travel value of machine per motor rotation = AL
AP
AL
Electronic
=
gear
. . . . . (1)
(There is a range which can be set in the numerical value set as AP/AL, so it is
necessary to make the setting range of AP/AL the value calculated from the
above expression (reduced) of relations.)
Example of the real setting is shown below.
(a) For ball screw
When the ball screw pitch is 20[mm], the servomotor is HF-KP
(262144[PLS/rev]) and direct connection (No reduction gear) is set.
Machine
Motor
Fig. 4.2 For ball screw
First, find how many millimeters the load (machine) will travel (AL) when the
servomotor runs for one rotation (AP).
AP (Number of pulses per motor rotation) = 262144[PLS]
AL (Travel value of machine per rotation)
= Ball screw pitch × Reduction ratio
= 20[mm]
Substitute this for the above expression (1).
AP
AL
=
262144[PLS]
20[mm]
Although it becomes above, when a control unit is set to [mm] unit, the
minimum unit of the command value in a program is 0.1[µm] and converted
from 20[mm] (20.0000[mm]) to 20000.0[µm].
AP
AL
=
262144[PLS]
20000.0[ m]
4-4
4 PARAMETERS FOR POSITIONING CONTROL
The travel value per motor rotation in this example is 0.000076[mm].
For example, when ordering the travel value of 19[mm], it becomes
249036.8[PLS] and the fraction of 0.8[PLS]. At this time, the Motion CPU
orders the travel value of 249036[PLS] to the servomotor and the fraction is
memorized in the Motion CPU.
Positioning is performed by seasoning the travel value with this fraction at
the next positioning.
4.2.2 Backlash compensation amount
(1) Backlash compensation amount can be set within the following range.
(Refer to Section "7.2 Backlash Compensation Function" for details.)
0
Backlash compensation amount × Number of pulses per rotation (AP)
Travel value per rotation (AL)
(=A)
65535[PLS]
(2) The servo error may occur depending on the type of the servo amplifier
(servomotor) or operation cycle even if the backlash compensation amount which
fulfill the above condition.
Set the backlash compensation amount within the following range in order for
servo error may not occur.
A
Maximum motor speed [r/min] × 1.2 × Encoder resolution [PLS] × Operation cycle [ms]
60[s] × 1000[ms]
[PLS]
4.2.3 Upper/lower stroke limit value
The upper/lower limit value for the travel range of the mechanical system is set.
RLS
FLS
(Travel range of the machine)
Stroke limit
(lower)
Limit switch for
emergency stop
Stroke limit
(upper)
Fig. 4.3 Travel range at the upper/lower stroke limit value setting
4-5
4 PARAMETERS FOR POSITIONING CONTROL
(1) Stroke limit range check
The stroke limit range is checked at the following start or during operation.
Operation start
• Position follow-up control
• Constant-speed control
• Speed switching control
• Positioning control
• Fixed-pitch feed control
• Speed control ( )
• Speed control ( )
Check
Remarks
Check
• It is checked whether the feed current value is within the
stroke limit range or not at the positioning start. If it
outside the range, an error occurs (error code: 106) and
positioning is not executed.
• If the interpolation path exceeds the stroke limit range
during circular interpolation start, an error occurs (error
codes: 207, 208) and deceleration stop is executed.
• If the current value exceeds the stroke limit range,
deceleration stop is executed.
Not check
• The current value becomes "0", and operation continues
until the external limit signal (FLS, RLS, STOP) is
received.
• Speed/position switching
control (including restart)
• It is checked after the switch to position control.
• JOG operation
• When the current value is executed a deceleration stop
from current command speed, if the current value
exceeds the stroke limit range, a deceleration stop is
made before a stroke limit. (Error code: 207) Travel to
the direction that returns the axis into the stroke range
is possible.
Check
• If the current value exceeds the stroke limit range, it
stops at stroke limit. (Error code: 207) In this case, a
deceleration stop is not made. Travel to the direction
that returns the axis into the stroke range is possible.
• Manual pulse generator
operation
POINTS
(1) Besides setting the upper/lower stroke limit value in the fixed parameters, the
stroke limit range can also be set by using the external limit signals (FLS, RLS).
(2) When the external limit signal turns off, a deceleration stop is executed.
"Deceleration time" and "Rapid stop deceleration time" can be used in the
parameter block for deceleration stop time.
4-6
4 PARAMETERS FOR POSITIONING CONTROL
4.2.4 Command in-position range
The command in-position is the difference between the positioning address (command
position) and feed current value.
Once the value for the command in-position has been set, the command in-position
signal (M2403+20n) turns on when the difference between the command position and
the feed current value enters the set range [(command position - feed current value)
(command in-position range)].
The command in-position range check is executed continuously during position control.
V
Position
control
start
Command in-position
setting value
Speed
position
control
start
Speed/position switching
Command in-position
setting value
t
Command in-position ON
( M2403+20n )
OFF
Execution of command in-position check
4-7
Execution of command
in-position check
4 PARAMETERS FOR POSITIONING CONTROL
4.2.5 Speed control 10 multiplier setting for degree axis
The setting range of command speed is 0.001 to 2147483.647[degree/min] normally in
the axis of control unit [degree]. However, when the "speed control 10 multiplier
setting for degree axis" is set to "valid" in the fixed parameter the speed setting range
increases 10 multiplier "0.01 to 21474836.47[degree/min]".
(1) When the "speed control 10 multiplier setting for degree axis" is set to "valid", the
positioning control is executed by the speed increased 10 multiplier command
speed set in the servo program or servo parameter, and speed limit value.
(2) In the interpolation control for the axis of "control unit [degree] and [except
degree]", if the interpolation control unit of parameter block is set as [degree]," the
positioning control is executed by the speed increased 10 multiplier command
speed and speed limit value.
(3) When the "speed control 10 multiplier setting for degree axis" is set as "valid", 2
figures below the decimal point of ***.** [degree/min] is displayed on the screen of
MT Developer.
<K 10>
INC-1
Axis
Speed
1, 360.00000degree
180.00degree/min
When the "control 10 multiplier
setting for degree axis" is set to "valid",
2 figures below the decimal point
is displayed .
(4) Speed setting range in the interpolation operation is shown below.
(a) Vector speed specification/Long-axis speed specification
If the "speed control 10 multiplier setting for degree axis" is set to "valid"
even by one axis among interpolation axes, the speed setting range is "0.01
to 21474836.47[degree/min] ".
(b) Reference-axis speed specification
If the "speed control 10 multiplier setting for degree axis" is set to "valid" in
the specified reference axis, the speed setting range is "0.01 to
21474836.47[degree/min] ".
4-8
4 PARAMETERS FOR POSITIONING CONTROL
Example
• An example for positioning control is shown below when the "speed control 10 multiplier setting for degree
axis" of fixed parameter and "interpolation control unit" of parameter block are set as follows.
• Speed control 10 multiplier setting for degree axis
Axis
Speed control 10 multiplier setting for degree axis
Axis 1
Invalid
Axis 2
Valid
• Interpolation control unit of parameter block
Block 10
Interpolation control unit
degree
(1) 1 axis linear positioning control program (Axis 1) (2) 1 axis linear positioning control program (Axis 2)
<K 10>
INC-1
Axis
Speed
<K 20>
1,
360.00000
18.000
1 axis linear positioning control
Axis used . . . . . . . Axis 1
Travel value to stop position
. . . . . . . 360.00000[degree]
INC-1
Axis
Speed
2,
Positioning speed . . . . 18.000[degree/min]
1 axis linear positioning control
Axis used . . . . . . . Axis 2
Travel value to stop position
. . . . . . . 360.00000[degree]
Positioning speed . . . . 180.00[degree/min]
[degree/min]
V
180.00
[degree/min] V
Axis 1
speed
360.00000
180.00
Servo program No.20
Axis 2
speed
Servo program No.10
18.000
t
t
(3) 2 axes linear interpolation control program (Axis 1, Axis 2)
(a) Vector speed specification
<K 30>
INC-2
Axis
Axis
Vector speed
[degree/min] V
180.00
1,
2,
360.00000
360.00000
180.00
2 axes linear interpolation control
Axis used . . . . . . . Axis 1, Axis 2
Axis 1 . . . . . 360.000[degree]
Travel value to stop position
Axis 2 . . . . . 360.000[degree]
Positioning speed . . . 180.00[degree/min]
[degree/min] V
Servo program No.30
127.28
Vector
speed
Axis 1
speed
t
t
[degree/min] V
127.28
Axis 2
speed
t
4-9
4 PARAMETERS FOR POSITIONING CONTROL
Example
(b) Long-axis reference specification
<K 50>
INC-2
Axis
1,
360.00000
Axis
2, 20000.00000
Long-axis speed
180.00
2 axes linear interpolation control
Axis used . . . . . . . Axis 1, Axis 2
Axis 1 . . . . . 360.00000[degree]
Travel value to stop position
Axis 2 . . . 20000.00000[degree]
Positioning speed . . . 180.00[degree/min]
[degree/min] V
Axis 1
speed
Servo program No.50
3.24
t
[degree/min] V
180.00
Servo program No.50
Axis 2
speed
t
(c) Reference-axis speed setting
<K 60>
INC-2
Axis
1,
360.00000
Axis
2, 20000.00000
Reference-axis speed
180.00
Reference-axis
2
2 axes linear interpolation control
Axis used . . . . . . . Axis 1, Axis 2
Axis 1 . . . . . 360.00000[degree]
Travel value to stop position
Axis 2 . . . 20000.00000[degree]
Positioning speed . . . 180.00[degree/min]
[degree/min] V
Axis 1
speed
Servo program No.60
3.24
t
[degree/min] V
180.00
Servo program No.60
Axis 2
speed
t
POINTS
When a speed change is executed by the Motion dedicated PLC instruction
(D(P).CHGV) or servo program (CHGV instruction) after setting the "speed control
10 multiplier setting for degree axis is valid", the positioning control is executed by
the speed increased 10 multiplier setting value.
4 - 10
4 PARAMETERS FOR POSITIONING CONTROL
4.3 Parameter Block
(1) The parameter blocks serve to make setting changes easy by allowing data such
as the acceleration/deceleration control to be set for each positioning processing.
(2) A maximum 64 blocks can be set as parameter blocks.
(3) Parameter blocks can be set using MT Developer.
(4) Parameter block to be set are shown in Table 4.2.
Table 4.2 Parameter Block Setting List
Setting range
No.
Item
mm
inch
degree
Setting range Units Setting range Units Setting range
Initial
PLS
Units
Setting range Units
value
Units
Remarks
Section
• Set the units for compensation
control.
1
Interpolation
control unit
0
1
2
3
• It can be also used as the units for
3
the command speed and allowable
6.1.4
error range for circular interpolation
set in the servo program.
• Set the maximum speed for
positioning/home position return.
2
Speed limit
value
0.01 to
mm/
0.001 to
inch/
6000000.00
min
600000.000
min
0.001 to
2147483.647
(Note-1)
degree/
1 to
min
2147483647
• If the positioning speed or home
PLS/s 200000 PLS/s
position return speed setting
exceeds the speed limit value,
control is executed at the speed
limit value.
3
4
• Set the time taken to reach the
Acceleration
1 to 65535[ms]
time
1000
ms
motion.
Deceleration
1 to 65535[ms]
time
1000
ms
Rapid stop
5
4.3.1
speed limit value from the start of
• Set the time taken to stop from
the speed limit value.
• Set the time taken to stop from
deceleration
1 to 65535[ms]
1000
ms
time
the speed limit value when a rapid
stop is executed.
• Set the S-curve ratio for S-pattern
processing.
6
S-curve ratio
0 to 100[%]
0
%
• When the S-curve ratio is 0[%],
trapezoidal
4.3.2
acceleration/deceleration
processing is executed.
7
Torque limit
Deceleration
8
1 to 1000[%]
value
processing on
STOP input
300
%
error range
for circular
servo program.
• Set the deceleration processing
0 : Deceleration stop is executed based on the deceleration time.
0
1 : Deceleration stop is executed based on the rapid stop deceleration time.
when external signals (STOP, FLS,
RLS) are input.
Allowable
9
• Set the torque limit value in the
• Set the permissible range for the
0 to 10000.0
µm
0 to 1.00000 inch 0 to 1.00000
degree
0 to 100000
PLS
100
PLS
locus of the arc and the set end
point coordinates.
4.3.3
interpolation
(Note-1): When the "speed control 10 multiplier setting for degree axis" is set to "valid", the setting range is 0.01 to 21474836.47[degree/min].
However, setting range of 0.001 to 2147483.647[degree/min] is displayed in the parameter block setting screen of programming software.
POINTS
(1) Parameter blocks are specified in the home position return data, JOG operation
data or servo program.
(2) The various parameter block data can be changed using the servo program.
(Refer to Section 5.3.)
4 - 11
4 PARAMETERS FOR POSITIONING CONTROL
POINTS
The data set in the parameter block is used in the positioning control, home position return
and JOG operation.
(1) The parameter block No. used in the positioning control is set using MT Developer at
the creating of the servo program. If it is not set, control is executed with the contents of
parameter block No.1.
Also, it is possible to set parameter block data individually in the servo program.
[Servo program creation screen]
Parameter block No.
setting
Setting items of the
parameter block
Individual parameter
block data setting
: Interpolation control unit
: Acceleration time
: Rapid stop deceleration time,
E
: Deceleration processing on STOP input
STOP
S RATIO : S-curve ratio when S-pattern processing
is executed
UNIT
S.R.
P.TORQ
: Speed limit value
: Deceleration time
: Torque limit value
: Allowable error range for circular
interpolation
(2) The parameter block No. used in the home position return or JOG operation is set at
the setting of the "home position return data" or "JOG operation data" using
MT Developer.
Refer to Section "6.23.1 Home position return data" or "6.21.1 JOG operation data" for
details.
[Home position return data setting screen]
Parameter block No.
setting of the home
position return
Parameter block No.
setting of the JOG
operation
4 - 12
4 PARAMETERS FOR POSITIONING CONTROL
4.3.1 Relationships between the speed limit value, acceleration time, deceleration time and
rapid stop deceleration time
The speed limit value is the maximum speed at the positioning/home position return.
The acceleration time is the time taken to reach the set speed limit value from the start
of positioning.
The deceleration time and rapid stop deceleration time are the time taken to effect a
stop from the set speed limit value.
Accordingly, the actual acceleration time, deceleration time, and rapid stop deceleration
time are faster, because the positioning speed is faster than the speed limit value.
Speed limit value
Speed
Rapid stop cause occurrence
Positioning
speed set in
the servo
program
1) Real acceleration time
Time take to reach the positioning speed
set in the servo program.
2) Real rapid stop deceleration time
Time taken to effect a rapid stop from the
positioning speed set in the servo program.
1) Real acceleration time
2) Real rapid stop
deceleration time
Time
Set acceleration Set rapid stop
deceleration
time
time
3) Real deceleration time
Time taken to stop from the positioning
speed set in the servo program.
3) Real deceleration time
Set deceleration time
4.3.2 S-curve ratio
S-curve ratio can be set as the acceleration and deceleration processing method for Spattern processing.
(Refer to Section 6.1.7 for details of S-curve acceleration/deceleration processing.)
Setting range of the S-curve ratio is 0 to 100[%].
If it is set outside the range, an error occurs at the start and control is executed with the
S-curve ratio set as 100[%].
Errors are set in the error item information (SD517).
Setting of the S-curve ratio enables acceleration/deceleration processing to be
executed gently.
The graph for S-pattern processing is a sine curve as shown below.
V
Positioning speed
Sine curve
0
t
Acceleration
time
4 - 13
Deceleration
time
Time
4 PARAMETERS FOR POSITIONING CONTROL
As shown below, the S-curve ratio setting serves to select the part of the sine curve to
be used as the acceleration/deceleration curve.
V
A
A
B/2
B
Positioning speed
B
B/2
B/A=1.0
t
S-curve ratio is 100[%]
V
Positioning speed
Sine curve
B
B/A=0.7
A
S-curve ratio = B/A 100[%]
t
S-curve ratio is 70[%]
4.3.3 Allowable error range for circular interpolation
The locus of the arc calculated from the start point address and central point address
may not coincide with the set end point address for the central-specified control.
The allowable error range for circular interpolation sets the allowable range for the error
between the locus of the arc determined by calculation and the end point address.
If the error is within the allowable range, circular interpolation to the set end point
address is executed while also executing error compensation by means of spiral
interpolation.
If it exceeds the setting range, an error occurs at the start and positioning does not
start. Such an error are set the applicable axis or minor error code area.
Error
End point address
by calculation
Locus determined by spiral
interpolation
Setting end point
address
Start point address
Central point address
Fig. 4.4 Spiral Interpolation
4 - 14
5 SERVO PROGRAMS FOR POSITIONING CONTROL
5. SERVO PROGRAMS FOR POSITIONING CONTROL
Servo programs specify the type of the positioning data required to execute the
positioning control in the Multiple CPU system.
This chapter describes the configuration and setting method of the servo programs.
Refer to Chapter "6 POSITIONING CONTROL" for details of the servo program.
5.1 Servo Program Composition Area
This section is described the composition of servo programs and the area in which
stores the servo program.
5.1.1 Servo program composition
A servo program is composed a program No., servo instructions and positioning data.
When a program No. and the required servo instructions are specified using
MT Developer, the positioning data required to execute the specified servo instructions
can be set.
[Explanation of the program]
K11 . . . . . . . Program No.11
ABS-3 . . . . . 3 axes linear interpolation control as absolute
data method.
Program No.
Control units
<K 11>
Servo instruction
Positioning
data
ABS-3
Axis
1,
Axis
2,
Axis
3,
Vector speed
Dwell
M-code
P.B.
3000000.0
5500000.0
-2500000.0
40000.00
2500
12
3
[mm]
[mm]
[mm]
[mm/min]
[ms]
Axis1, 3000000.0
Axis2, 5500000.0
Axis3, -2500000.0
. . . Axis used and positioning address
Used axes
Positioning address
1
3000000.0[µm]
2
5500000.0[µm]
3
-2500000.0[µm]
• Vector speed …………. Command speed for the 3 axes
(axis 1, axis 2, axis 3) combination
40000.00 [mm/min]
Number of program steps
10
Number of used programs 20/13312
• Dwell ……………………. Dwell time
• M-code …………………. M-code
2500 [ms]
12
• P.B. ……………………... Parameter block No. 3
Fig. 5.1 Composition example of servo program
(1) Program No. ........... This No. is specified using the Motion SFC program.
Any No. in the range of 0 to 4095 can be set.
(2) Servo instruction .… Type of positioning control is indicated.
Refer to Section 5.2 for details.
5-1
5
5 SERVO PROGRAMS FOR POSITIONING CONTROL
(3) Positioning data ...... This is the data required to execute servo instructions.
The data required to execute is fixed for each servo
instruction.
Refer to Section 5.3 for details.
The follows applies for the servo program shown in Figure
5.1:
• Axis used and
Data which must be set in order to
positioning address
execute the servo instruction.
• Command speed
• Dwell time
Data which will be set to default
• M-code
values for control if not set.
• P.B.
Control is executed using the data
(parameter block)
of parameter block 3 (P.B.3).
5.1.2 Servo program area
(1) Servo program area
This area is an internal memory of the Multiple CPU system which store the
servo program created using MT Developer.
This area is an internal RAM.
(2) Servo program capacity
The servo program area has a capacity of 14334 steps.
0
Program No.10
Program No.1
Program No. 2
Servo programs are stored in the order
in which their program No. were created.
Servo program area
(14k steps)
14333
Step
Fig. 5.2 Servo program area
POINT
If the servo program area has insufficient capacity, execute the multiple positioning
control operations with one program by indirect setting of the positioning data used
in the servo program. (Refer to Section 5.4.2 for details of indirect setting.)
5-2
5 SERVO PROGRAMS FOR POSITIONING CONTROL
5.2 Servo Instructions
The servo instructions used in the servo programs are shown below.
Refer to Chapter 6 for details of the servo instruction.
Refer to Chapter 7 of the "Q173DCPU/Q172DCPU Motion Controller (SV13/SV22)
Programming Manual (Motion SFC)" for details of the current value change control
(CHGA, CHGA-E, CHGA-C).
(1) Guide to servo instruction list
Table. 5.1 Guide to Servo Instruction List
3)
4)
5)
6)
7)
8)
Positioning data
1
2 1
1
1
1
1
1
1
1
1
2
1
1
2
1
1
1
1
2
1
2
1/
1(B)
2
2
1
Number of steps
1
2
/deceleration time
Program No.
Command speed (constant speed)
1
2
Fixed position stop
S-curve ratio
Repeat condition
1
2
Skip
Allowable error range for circular
interpolation
1
1
FIN acceleration/deceleration
Torque limit value
Deceleration processing
at stop input
1
2
Cancel
Rapid stop deceleration time
1
Acceleration time
Deceleration time
1 1
2
Control unit
Reference axis No.
1
1
Speed limit value
Frequency
1
1
Amplitude
Pitch
Starting angle
1
1
Radius
Central point
1
2
M-code
1
2
WAIT-ON/OFF
Other
Parameter block
Fixed position stop acceleration
1
OSC
Arc/Helical
Torque limit value
Auxiliary point
1
Dwell time
1
Command speed
Axis
Processing
Address/travel
Instruction
symbol
Parameter block No.
Positioning control
Common
Virtual enable
Number of step
axes
1 axis
Number of indirect words 1
ABS-1
Absolute 1-axis positioning
INC-1
Incremental 1-axis positioning
ABS-2
Absolute 2-axes linear
2
2
2 2
1(B) 1(B)
2
1
1
1
2
1(B)
1
2
1(B)
4 to 17
1)
2)
Number
1)
1
Description
Instruction symbol
Gives the servo instructions usable in servo programs.
Processing
Gives the processing outlines of the servo instructions.
(a) Indicates positioning data which can be set in servo instructions.
1)
: Item which must be set (Data which cannot execute the servo instruction unless it sets.)
2)
: Item which is set when required (Data which will be controlled by the default value unless it sets.)
2)
(b) Allows direct or indirect designation (except axis No.)
1) Direct designation : Set with numerical value.
2) Indirect designation : Set with word device.
• Servo program execution is controlled using the preset word device contents.
• Each setting item may either be 1 or 2 word data.
• For 2 word data, set the start device No..
(c) Number of steps
As there are more setting items, there are more number of instruction steps. (The number of steps is displayed when a
servo program is created.)
(The instruction +
item comprise the minimum steps, and one
item increases the number of steps by 1.)
3)
Items common to the servo instructions
4)
Items set in circular interpolation starting servo programs
5)
Items set for high-speed oscillation
6)
Set when changing the parameter block (default value when not set) data set in the servo program to control.
(The parameter block data are not changed.)
7)
Setting items other than the common, circular and parameter block items (Items to be set vary with the servo instruction.)
8)
Indicates the number of steps of each servo instruction.
5-3
5 SERVO PROGRAMS FOR POSITIONING CONTROL
(2) Servo instruction list
The servo instructions that can be used in servo programs and the positioning
data set in the servo instruction are shown in Table 5.2. Refer to Section 5.3 for
details of the positioning data set in the servo instructions.
Table 5.2 Servo instruction list
Positioning data
Radius
Central point
Pitch
1
1
1
1
1
1
1
1
Number of indirect words
1
—
2
2
1
1
1
2
2
2
1
—
2 axes
3 axes
Radius-specified
Circular interpolation control
Auxiliary
pointspecified
4 axes
Linear interpolation control
1 axis
Virtual enable
ABS-1
Absolute 1-axis positioning
INC-1
Incremental 1-axis positioning
ABS-2
Absolute 2-axes linear interpolation
INC-2
Incremental 2-sxes linear interpolation
ABS-3
Absolute 3-axes linear interpolation
INC-3
Incremental 3-axes linear interpolation
ABS-4
Absolute 4-axes linear interpolation
INC-4
Incremental 4-axes linear interpolation
Torque limit value
1
Dwell time
1
Command speed
1
Axis
Auxiliary point
M -code
Arc/Helical
Number of steps
Processing
Address/travel value
Instruction
symbol
Parameter block No.
Positioning control
Common
ABS
Absolute auxiliary point-specified circular
interpolation
INC
Incremental auxiliary point-specified circular
interpolation
ABS
Absolute radius-specified circular
interpolation less than CW 180°
ABS
Absolute radius-specified circular
interpolation CW 180° or more
ABS
Absolute radius-specified circular
interpolation less than CCW 180°
ABS
Absolute radius-specified circular
interpolation CCW 180° or more
INC
Incremental radius-specified circular
interpolation less than CW 180°
INC
Incremental radius-specified circular
interpolation CW 180° or more
INC
Incremental radius-specified circular
interpolation less than CCW 180°
INC
Incremental radius-specified circular
interpolation CCW 180° or more
5-4
2
2
—
—
—
1
1
1
2
1
1
1
1
2
2
1
1
1
1
—
1
1
1
1
1
1
1
2
5-5
WAIT-ON/OFF
FIN acceleration/deceleration
Skip
Cancel
Command speed
(constant speed)
Program No.
Repeat condition
Fixed position stop
—
S-curve ratio
Parameter block
Fixed position stop acceleration
/deceleration time
—
Allowable error range for circular
interpolation
Deceleration processing
at stop input
Torque limit value
Rapid stop deceleration time
*1
Deceleration time
Acceleration time
Speed limit value
Control unit
OSC
Reference axis No.
Frequency
Amplitude
Starting angle
5 SERVO PROGRAMS FOR POSITIONING CONTROL
Positioning data
Others
—
—
Number of steps
1
1
1
2
2
2
1
2
1
1
1
*2
1/
1(B)
—
2
*2
1(B)
*2
1(B)
1
*2
1(B)
1
*2
1(B)
4 to 17
5 to 20
7 to 21
8 to 22
7 to 22
6 to 21
: Must be set.
: Set if required.
*1 : Only reference axis speed specification.
*2 : (B) indicates a bit device.
5 SERVO PROGRAMS FOR POSITIONING CONTROL
Table 5.2 Servo Instruction List (continued)
Positioning data
Auxiliary point
Radius
Central point
Pitch
1
1
1
1
1
1
1
Number of indirect words
1
—
2
2
1
1
1
2
2
2
1
—
Central point-specified
Central point-specified
Radius-specified
Auxiliary
pointspecified
Circular interpolation
control
Virtual enable
Helical interpolation control
Torque limit value
1
Dwell time
1
Command speed
1
Address/travel value
1
Processing
Axis
Number of steps
Parameter block No.
Positioning control
Instruction
symbol
Arc/Helical
M-code
Common
ABS
Absolute central point-specified circular
interpolation CW
ABS
Absolute central point-specified circular
interpolation CCW
INC
Incremental central point-specified circular
interpolation CW
INC
Incremental central point-specified circular
interpolation CCW
ABH
Absolute auxiliary point- specified helical
interpolation
INH
Incremental auxiliary point- specified helical
interpolation
ABH
Absolute radius-specified helical
interpolation less than CW 180°
ABH
Absolute radius-specified helical
interpolation CW 180° or more
ABH
Absolute radius-specified helical
interpolation less than CCW 180°
ABH
Absolute radius-specified helical
interpolation CCW 180° or more
INH
Incremental radius-specified helical
interpolation less than CW 180°
INH
Incremental radius-specified helical
interpolation CW 180° or more
INH
Incremental radius-specified helical
interpolation less than CCW 180°
INH
Incremental radius-specified helical
interpolation CCW 180° or more
ABH
Absolute central point-specified helical
interpolation CW
ABH
Absolute central point-specified helical
interpolation CCW
INH
Incremental central point-specified helical
interpolation CW
INH
Incremental central point-specified helical
interpolation CCW
5-6
2
2
—
—
—
1
1
1
2
1
1
1
1
2
2
1
1
1
1
—
1
1
1
1
1
1
1
2
5-7
WAIT-ON/OFF
FIN acceleration/deceleration
Skip
Cancel
Command speed
(constant speed)
Program No.
Repeat condition
Fixed position stop
—
S-curve ratio
Parameter block
Fixed position stop acceleration
/deceleration time
—
Allowable error range for circular
interpolation
Deceleration processing
at stop input
Torque limit value
Rapid stop deceleration time
*1
Deceleration time
Acceleration time
Speed limit value
Control unit
OSC
Reference axis No.
Frequency
Amplitude
Starting angle
5 SERVO PROGRAMS FOR POSITIONING CONTROL
Positioning data
Others
—
—
Number of steps
1
1
1
2
2
2
1
2
1
1
1
*2
1/
1(B)
—
2
*2
1(B)
*2
1(B)
1
*2
1(B)
1
*2
1(B)
7 to 22
10 to 27
9 to 26
10 to 27
: Must be set.
: Set if required.
*1 : Only reference axis speed specification.
*2 : (B) indicates a bit device.
5 SERVO PROGRAMS FOR POSITIONING CONTROL
Table 5.2 Servo Instruction List (continued)
Positioning data
Auxiliary point
Radius
Central point
Pitch
1
1
1
1
1
1
1
Number of indirect words
1
—
2
2
1
1
1
2
2
2
1
—
Reverse Forward Reverse Forward Reverse Forward
3
rotation rotation rotation rotation rotation rotation
Restart
Speed-position
control
Speed
control ( )
Speed
control ( )
Fixed-pitch feed
axes 2 axes 1 axis
Virtual enable
FEED-1
1-axis fixed-pitch feed start
FEED-2
2-axes linear interpolation
fixed-pitch feed start
FEED-3
3-axes linear interpolation
fixed-pitch feed start
VF
Speed control ( ) forward
rotation start
VR
Speed control ( ) reverse
rotation start
VVF
Speed control ( ) forward
rotation start
VVR
Speed control ( ) reverse
rotation start
VPF
Speed-position control
forward rotation start
VPR
Speed-position control
reverse rotation start
VPSTART
Speed-position control restart
VSTART
Speed-switching control start
VEND
Speed-switching control end
Speed-switching control
ABS-1
ABS-2
Speed-switching control end
point address
ABS-3
INC-1
INC-2
Travel value up to speed-switching
control end point
INC-3
VABS
Speed-switching point
absolute specification
VINC
Speed-switching point
incremental specification
Torque limit value
1
Dwell time
1
Command speed
1
Address/travel value
1
Processing
Axis
Number of steps
Parameter block No.
Positioning control
Instruction
symbol
Arc/Helical
M-code
Common
5-8
2
2
—
—
—
1
1
1
2
1
1
1
1
2
2
1
1
1
1
—
1
1
1
1
1
1
1
2
5-9
WAIT-ON/OFF
FIN acceleration/deceleration
Skip
Cancel
Command speed
(constant speed)
Program No.
Repeat condition
Fixed position stop
—
S-curve ratio
Parameter block
Fixed position stop acceleration
/deceleration time
—
Allowable error range for circular
interpolation
Deceleration processing
at stop input
Torque limit value
Rapid stop deceleration time
*1
Deceleration time
Acceleration time
Speed limit value
Control unit
OSC
Reference axis No.
Frequency
Amplitude
Starting angle
5 SERVO PROGRAMS FOR POSITIONING CONTROL
Positioning data
Others
—
—
Number of steps
1
1
1
2
2
2
1
2
1
1
1
*2
1/
1(B)
—
2
*2
1(B)
*2
1(B)
1
*2
1(B)
1
*2
1(B)
4 to 17
5 to 19
7 to 21
3 to 15
3 to 16
4 to 18
2 to 4
1 to 13
1
4 to 9
5 to 10
7 to 12
4 to 9
5 to 10
7 to 12
4 to 6
: Must be set.
: Set if required.
*1 : Only reference axis speed specification.
*2 : (B) indicates a bit device.
5 SERVO PROGRAMS FOR POSITIONING CONTROL
Table 5.2 Servo Instruction List (continued)
Positioning data
Auxiliary point
Radius
Central point
Pitch
1
1
1
1
1
1
1
1
1
1
1
Number of indirect words
1
—
2
2
1
1
1
2
2
2
1
Axis
Number of steps
Processing
—
rotation rotation
control Reverse Forward
follow-up
Speed control
with fixed
Position
position stop
Virtual enable
PVF
PVR
Speed control with fixed position stop
absolute specification
PFSTART
Position follow-up control start
CPSTART1
1-axis constant-speed control start
CPSTART2
2-axes constant-speed control start
CPSTART3
3-axes constant-speed control start
CPSTART4
4-axes constant-speed control start
ABS-1
ABS-2
ABS-3
ABS-4
Constant-speed control
ABS
ABS
Constant-speed control passing point
absolute specification
ABS
ABS
ABS
ABS
ABS
ABH
ABH
ABH
ABH
Torque limit value
M-code
Arc/Helical
Dwell time
Command speed
Address/travel value
Instruction
symbol
Parameter block No.
Positioning control
Common
Constant-speed control passing point
helical absolute specification
ABH
ABH
ABH
5 - 10
2
2
—
—
—
1
1
1
2
1
1
1
1
2
2
1
1
1
1
—
1
1
1
—
—
1
1
1
1
2
1
1
5 - 11
1
1/
1(B)
*2
1
2
—
2
2
2
1(B) 1(B)
*2
*2
1
1
1(B)
*2
Fixed position stop
2
Fixed position stop acceleration
/deceleration time
WAIT-ON/OFF
FIN acceleration/deceleration
Parameter block
Skip
Cancel
Command speed
(constant speed)
Program No.
Repeat condition
S-curve ratio
Allowable error range for circular
interpolation
Deceleration processing
at stop input
Torque limit value
Rapid stop deceleration time
*1
Deceleration time
Acceleration time
Speed limit value
Control unit
OSC
Reference axis No.
Frequency
Amplitude
Starting angle
5 SERVO PROGRAMS FOR POSITIONING CONTROL
Positioning data
Others
—
—
1
1
1
*2
1(B)
Number of steps
6 to 19
4 to 16
3 to 15
3 to 17
4 to17
2 to 10
3 to 11
4 to 12
5 to 13
5 to 14
4 to 13
5 to 14
9 to 14
8 to 13
9 to 14
: Must be set.
: Set if required.
*1 : Only reference axis speed specification.
*2 : (B) indicates a bit device.
5 SERVO PROGRAMS FOR POSITIONING CONTROL
Table 5.2 Servo Instruction List (continued)
Positioning data
Auxiliary point
Radius
Central point
Pitch
1
1
1
1
1
1
1
1
1
1
1
Number of indirect words
1
—
2
2
1
1
1
2
2
2
1
Axis
Number of steps
Processing
—
Virtual enable
INC-1
INC-2
INC-3
INC-4
INC
INC
Constant-speed control passing point
incremental specification
Constant-speed control
INC
INC
INC
INC
INC
INH
INH
INH
INH
Constant-speed control passing point
helical incremental specification
INH
INH
INH
CPEND
Torque limit value
M-code
Arc/Helical
Dwell time
Command speed
Address/travel value
Instruction
symbol
Parameter block No.
Positioning control
Common
Constant-speed control end
5 - 12
2
2
—
—
—
1
1
1
2
1
1
1
1
2
2
1
1
1
1
—
1
1
1
—
—
1
1
1
1
2
1
1
5 - 13
1
1/
1(B)
*2
1
2
—
2
2
2
1(B) 1(B)
*2
*2
1
2
1
1(B)
Fixed position stop
*2
Fixed position stop acceleration
/deceleration time
WAIT-ON/OFF
FIN acceleration/deceleration
Parameter block
Skip
Cancel
Command speed
(constant speed)
Program No.
Repeat condition
S-curve ratio
Allowable error range for circular
interpolation
Deceleration processing
at stop input
Torque limit value
Rapid stop deceleration time
*1
Deceleration time
Acceleration time
Speed limit value
Control unit
OSC
Reference axis No.
Frequency
Amplitude
Starting angle
5 SERVO PROGRAMS FOR POSITIONING CONTROL
Positioning data
Others
—
—
1
1
1
*2
1(B)
Number of steps
2 to 10
3 to 11
4 to 12
5 to 13
5 to 14
4 to 13
5 to 14
9 to 14
8 to 13
9 to 14
1 to 2
: Must be set.
: Set if required.
*1 : Only reference axis speed specification.
*2 : (B) indicates a bit device.
5 SERVO PROGRAMS FOR POSITIONING CONTROL
Table 5.2 Servo Instruction List (continued)
Positioning data
Auxiliary point
Radius
Central point
Pitch
1
1
1
1
1
1
1
1
1
1
1
Number of indirect words
1
—
2
2
1
1
1
2
2
2
1
Axis
Number of steps
Processing
—
FOR-TIMES
Repeat range start setting
FOR-OFF
START
Simultaneous start
ZERO
Home position return start
OSC
Current Value
change
Simultaneous
start
Repeat range end setting
Home
position
return
NEXT
High speed
oscillation
Repetition of
same control
(used in speed
switching
control, constantspeed control)
Virtual enable
FOR-ON
CHGA
Torque limit value
M-code
Arc/Helical
Dwell time
Command speed
Address/travel value
Instruction
symbol
Parameter block No.
Positioning control
Common
High-speed oscillation
Servomotor/Virtual Servomotor Shaft
Current Value Change
CHGA-E
Encoder current value change
CHGA-C
CAM shaft current value change
5 - 14
2
2
—
—
—
1
1
1
2
1
1
1
1
2
2
1
1
1
1
—
1
1
1
—
—
1
1
1
1
2
1
1
5 - 15
1
1/
1(B)
*2
1
2
—
2
2
2
1(B) 1(B)
*2
*2
1
1
1(B)
*2
Fixed position stop
2
Fixed position stop acceleration
/deceleration time
WAIT-ON/OFF
FIN acceleration/deceleration
Parameter block
Skip
Cancel
Command speed
(constant speed)
Program No.
Repeat condition
S-curve ratio
Allowable error range for circular
interpolation
Deceleration processing
at stop input
Torque limit value
Rapid stop deceleration time
*1
Deceleration time
Acceleration time
Speed limit value
Control unit
OSC
Reference axis No.
Frequency
Amplitude
Starting angle
5 SERVO PROGRAMS FOR POSITIONING CONTROL
Positioning data
Others
—
—
1
1
1
*2
1(B)
Number of steps
2
3
2 to 3
2
5 to 10
3
: Must be set.
: Set if required.
*1 : Only reference axis speed specification.
*2 : (B) indicates a bit device.
5 SERVO PROGRAMS FOR POSITIONING CONTROL
5.3 Positioning Data
The positioning data set in the servo programs is shown in Table 5.3.
Table 5.3 Positioning data
Setting value using MT Developer
Name
Explanation
Parameter block
No.
• Set based on which parameter block
deceleration processing at the acceleration/
deceleration processing and STOP input.
Axis
• Set the starting axis.
• It becomes the interpolation starting axis No.
at the interpolation.
Incremental
data method
Common Settings
Address/travel value
Absolute data
method
Command speed
Default
value
inch
1
degree
PLS
0 to 359.99999
-2147483648
to
2147483647
1 to 64
1 to 32
Set the positioning address as an
Address absolute method with an absolute
address.
Travel
value
Setting range
mm
-214748364.8
to 214748364.7
[µm]
Set the positioning address as an
incremental data method with a travel
value. Travel direction is indicated by
the sign. Only positive settings can
be made at the speed/position
control.
Positive : Forward rotation
(address increase direction)
Negative: Reverse rotation
(address decrease direction)
-21474.83648
to
21474.83647
Expect for the speed/position switching control
0 to 2147483647
Speed/position switching control
• Sets the positioning speed.
• Units for speed are the "control units" set in
the parameter block.
• It becomes the vector speed/long-axis
reference speed/reference axis speed at the
interpolation starting. (PTP control only)
0 to
214748364.7
[µm]
0 to
21474.83647
0.01 to
6000000.00
[mm/min]
0.001 to
600000.000
[inch/min]
0 to
21474.83647
0.001 to
2147483.647
[degree/min]
(Note-5)
Dwell time
• Set the time until outputs the positioning
complete signal (M2401+20n) after
positioning to positioning address.
0[ms]
0 to 5000[ms]
M-code
• Set the M-code.
• Set for each point at the speed-switching
control and constant-speed control.
• Updated it at the start or specified point.
0
0 to 32767
Torque limit value
• Set the torque limit value.
Torque limit
• The torque limit is performed based on the
setting
parameter block data at the start. The speed- valued [%]
switching control can be set for each point
in the
and the setting torque limit values can be
parameter
performed with the specified point.
block
5 - 16
1 to 1000[%]
0 to
2147483647
1 to
2147483647
[PLS/s]
5 SERVO PROGRAMS FOR POSITIONING CONTROL
Setting value using the Motion SFC program (Indirect setting)
Setting range
mm
inch
degree
PLS
Indirect setting
Possible/
not possible
1 to 64
-2147483648
to 2147483647
( 10-1[µm])
-2147483648
to 214748647
-5
( 10 [inch])
(
Number of
used words
1
-2147483648
0 to 35999999
10-5[degree]) to 2147483647
Processing at the setting error
Error item information
(Stored in SD517)
(Note-4)
Control using
default value
Not start
1
n03 (Note-1)
Except for the speed/position switching control
0 to 214783647
Speed/position switching control
2
0 to 2147483647 0 to 2147483647 0 to 2147483647
( 10-1[µm])
( 10-5[inch]) ( 10-5[degree])
1 to 600000000 1 to 600000000
-3
( 10-2
( 10
[mm/min])
[inch/min])
1 to 2147483647
-3
( 10
[degree/min])
0 to
2147483647
1 to
2147483647
[PLS/s]
2
4
0 to 5000[ms]
1
5
0 to 32767
1
6
1 to 1000[%]
1
7
(Note-5)
(Note-2)
(Note-3)
(Note-1): The "n" in n03, n08, n09 and n10, indicates the axis No. (1 to 32).
(Note-2): When an error occurs because the speed limit value is exceeded, it is controlled at the speed limit value.
(Note-3): Applies when the command speed is "0".
(Note-4): If there are multiple errors in the same program, the latest error item information is stored.
(Note-5): When the "speed control 10 multiplier setting for degree axis" is set to "valid", the setting range is 0.01 to 21474836.47 [degree/min].
5 - 17
5 SERVO PROGRAMS FOR POSITIONING CONTROL
Table 5.3 Positioning data (Continued)
Setting value using MT Developer
Radius
Central
point
Circular Interpolation
Auxiliary
point
Name
Absolute
data method
Explanation
Default
value
• Set at the auxiliary point-specified circular
interpolation.
Setting range
mm
-214748364.8 to
-21474.83648
214748364.7
to 21474.83647
[µm]
Incremental
data method
Absolute
data method
Incremental
data method
Absolute
data method
inch
• Set at the radius-specified circular
interpolation.
• The sitting ranges depending on the
positioning method is shown to the right.
Parameter block
0 to 359.99999
-2147483648
to 2147483647
• Set at the central point-specified circular
interpolation.
0.1 to
429496729.5
[µm]
0.00001 to
42949.67295
0 to 359.99999
1 to 4294967295
0.1 to
214748364.7
[µm]
0.00001 to
21474.83647
0.00001 to
21474.83647
1 to 2147483647
0 to 359.99999
-2147483648
to 2147483647
-214748364.8 to
-21474.83648
214748364.7
to 21474.83647
[µm]
0 to 2147483647
Number of pitches • Set at the helical interpolation.
Speed limit value
PLS
0 to 2147483647
Incremental
data method
Control unit
degree
• It can be set only items to be changed of the
specified parameter block data.
• Refer to Section 4.3 "Parameter Block" for
details of each data.
0 to 999
3
200000
[PLS/s]
0
0.01 to
6000000.00
[mm/min]
1
2
0.001 to
600000.000
[inch/min]
0.001 to
2147483.647
[degree/min]
(Note-5)
Acceleration time
1000[ms]
1 to 65535[ms]
Deceleration time
1000[ms]
1 to 65535[ms]
Rapid stop
deceleration time
1000[ms]
1 to 65535[ms]
S-curve ratio
Torque limit value
Deceleration
processing on
STOP input
Allowable error
range for circular
interpolation
0[%]
0 to 100[%]
300[%]
1 to 1000[%]
0
100[PLS]
5 - 18
3
1 to
2147483647
[PLS/s]
0: Deceleration stop based on the deceleration time
1: Deceleration stop based on the rapid stop deceleration time
0 to 10000.0
[µm]
0 to 1.00000
0 to 1.00000
0 to 100000
5 SERVO PROGRAMS FOR POSITIONING CONTROL
Setting value using the Motion SFC program (Indirect setting)
Setting range
mm
inch
degree
-2147483648 to
2147483647
( 10-1[µm])
-2147483648
to 2147483647
-5
( 10 [inch])
(
PLS
Indirect setting
Possible/
not possible
-2147483648
0 to 35999999
10-5[degree]) to 2147483647
Processing at the setting error
Number of
used words
2
2
Error item information
(Stored in SD517)
(Note-4)
n08
Control using
default value
(Note-1)
0 to 2147483647
1 to 4294967295 1 to 4294967295 0 to 35999999
-1
-5
-5
( 10 [inch])
( 10 [degree])
( 10 [µm])
1 to
4294967295
1 to 2147483647 1 to 2147483647 1 to 2147483647
( 10-1[µm])
( 10-5[inch])
( 10-5[degree])
1 to
2147483647
n09 (Note-1)
2
-2147483648
to 2147483647
( 10-1[µm])
-2147483648
to 2147483647
( 10-5[inch])
(
-2147483648
0 to 35999999
10-5[degree]) to 2147483647
2
2
n10 (Note-1)
0 to 2147483647
0 to 999
0
1
28
3
1
11
1 to
2147483647
[PLS/s]
2
12
1 to 65535[ms]
1
13
1 to 65535[ms]
1
14
1 to 65535[ms]
1
15
1
2
1 to 2147483647
1 to 600000000 1 to 600000000
( 10-3
-2
-3
( 10
( 10
[degree/min])
[mm/min])
[inch/min])
(Note-5)
0 to 100[%]
1
21
1 to 1000[%]
1
16
0: Deceleration to a stop in accordance with the deceleration time
1: Deceleration to a stop in accordance with the rapid stop
deceleration time
1
1 to 100000
-1
( 10 [µm])
2
1 to 100000
-5
( 10 [inch])
(
1 to 100000
-5
10 [degree])
1 to 100000
[PLS]
17
(Note-1): The "n" in n03, n08, n09 and n10, indicates the axis No. (1 to 32).
(Note-4): If there are multiple errors in the same program, the latest error item information is stored.
(Note-5): When the "speed control 10 multiplier setting for degree axis is set to "valid", is 0.01 to 21474836.47 [degree/min].
5 - 19
Not start
5 SERVO PROGRAMS FOR POSITIONING CONTROL
Table 5.3 Positioning data (Continued)
Setting value using MT Developer
Name
Default
value
Setting range
mm
inch
degree
Repeat condition
(Number of
repetitions)
Set the repeat conditions between FORTIMES instruction and NEXT instruction.
Repeat condition
(ON/OFF)
Set the repeat conditions between FORON/OFF instruction and NEXT instruction.
X, Y, M, B, F, U \G
Set the program No. for simultaneous start.
0 to 4095
Program No.
Command speed
(constant-speed)
Others
Explanation
1 to 32767
Set the speed for points on the way in the
servo program.
0.01 to
6000000.00
[mm/min]
0.001 to
600000.000
[inch/min]
0.001 to
2147483.647
[degree/min]
(Note-5)
Cancel
Set to stop execution of a servo program by
deceleration stop by turning on the specified
bit device in the servo program.
X, Y, M, B, F, U \G
Skip
Set to cancel positioning to pass point and
execute the positioning to the next point by
turning on the specified bit device during
positioning at each pass point for constantspeed control instruction.
X, Y, M, B, F, U \G
FIN acceleration/
deceleration
Set to execute positioning to each pass point
for constant-speed control instruction by
turning on the FIN signal.
1 to 5000[ms]
WAIT-ON/OFF
Set to make state of the waiting for execution
by constant-speed control and execute the
positioning immediately by turning on/off the
command bit device.
X, Y, M, B, F, U \G
Acceleration/deceleration time used in the
Fixed position stop
starting of speed control with fixed position
acceleration/
stop, speed change request (CHGV) or fixed
deceleration time
position stop command ON.
Fixed position stop
PLS
1 to 65535[ms]
Command bit device of fixed position stop is
set.
X, Y, M, B, F, U \G
5 - 20
1 to
2147483647
[PLS/s]
5 SERVO PROGRAMS FOR POSITIONING CONTROL
Setting value using the Motion SFC program (Indirect setting)
Setting range
mm
inch
degree
PLS
Indirect setting
Possible/
not possible
Number of
used words
Processing at the setting error
Error item information
(Stored in SD517)
(Note-4)
Control using
default value
Control by K1
1 to 32767
1
18
0 to 4095
1
19
2
4
1 to 5000[ms]
1
13
Control by
1000[ms]
1 to 65535[ms]
1
13
Control by
1000[ms]
1 to 2147483647
1 to 600000000 1 to 600000000
-3
( 10
-2
-3
( 10
( 10
[degree/min])
[mm/min])
[inch/min])
(Note-5)
1 to
2147483647
[PLS/s]
(Note-2)
(Note-2): When an error occurs because the speed limit value is exceeded, it is controlled at the speed limit value.
(Note-3): Applies when the command speed is "0".
(Note-4): If there are multiple errors in the same program, the latest error item information is stored.
(Note-5): When the "speed control 10 multiplier setting for degree axis is set to "valid", is 0.01 to 21474836.47 [degree/min].
5 - 21
Not start
(Note-3)
5 SERVO PROGRAMS FOR POSITIONING CONTROL
5.4 Setting Method for Positioning Data
This section describes how to set the positioning data used in the servo program.
There are two ways to set positioning data, as follows:
(1) Setting by specifying numerical values … Refer to Section 5.4.1
(2) Indirect setting by devices ……….… Refer to Section 5.4.2
"Setting by specifying numerical values" and "indirect setting by word devices" can be
used together in one servo program.
5.4.1 Setting method by specifying numerical values
In the setting method by specifying numerical values, each positioning data is set by a
numerical value, and it becomes fixed data.
Data can be set and corrected using MT Developer only.
Numerical value setting for
positioning data
<K 11>
Positioning
data
ABS-3
Axis
1,
Axis
2,
Axis
3,
Vector speed
Dwell
M-code
P.B.
3000000.0
5500000.0
-2500000.0
40000.00
2500
12
3
Fixed data for one servo
program.
Fig. 5.3 Setting example of positioning data by specifying numerical value
5 - 22
5 SERVO PROGRAMS FOR POSITIONING CONTROL
5.4.2 Indirect setting method by devices
In the indirect setting method (Note-1) by devices, the device No. is specified to the
positioning data specified with the servo program.
By using the contents (data) of specified device using the Motion SFC program
(Automatic refresh, etc.), multiple positioning controls can be executed in one servo
program.
The device used in the indirect setting is the device of the Motion CPU but the device
of the PLC CPU.
The device memory composition of the Motion CPU and PLC CPU is shown below.
PLC CPU
PLC control
processor
Configuration between modules
Motion CPU
1)
2)
Device memory
Device memory
Multiple CPU
high speed
transmission
memory
Multiple CPU
high speed
bus
Multiple CPU
high speed
transmission
memory
Motion control
processor
SSCNET
Q series PLC system bus
Servo
amplifier
PLC I/O module
(DI/O)
PLC intelligent
function module
(A/D, D/A, etc.)
Motion module
(Proximity dog signal, manual
pulse generator input)
M
M Servomotor
Note) : Device memory data : 1) = 2)
(Note-1): Device memory in the Motion CPU.
5 - 23
5 SERVO PROGRAMS FOR POSITIONING CONTROL
(1) Word devices for indirect setting data
The devices for indirect setting data are the data registers (D), link registers (W),
motion registers (#) and Multiple CPU area device (U \G). Word devices except
the above devices cannot be used.
The usable setting range of word devices is shown below.
Word device
Setting range
D
800 to 8191
W
0 to 1FFF
#
0 to 7999
U \G
10000 to (10000+p-1) (Note-1)
(Note-1): "p" indicates the user setting area points of the Multiple CPU high speed transmission area for
the each CPU.
Indirect setting by word device
<K 11>
ABS-3
Axis
1,
Axis
2,
Axis
3,
Vector speed
Dwell
M-code
P.B.
Positioning
data
D3000
D3004
W010
40000.00
W1B0
D3600
3
Execute the positioning control by the data of
(D3001, D3000), (D3005, D3004), (W11, W10),
W1B0 and D3600.
Numerical value setting
Axis No. cannot be set indirectly by word device.
Fig. 5.4 Example of indirect setting by word device for positioning data
(2) Bit devices for indirect setting data
The devices for indirect setting data are the input (X), output (Y), internal relay
(M), link relay (B), annunciator (F) and Multiple CPU area device (U \G).
Bit devices except the above devices cannot be used.
The usable setting range of bit devices is shown below.
Bit device
Setting range
X
0000 to 1FFF
Y
0000 to 1FFF
M
0 to 8191
B
0000 to 1FFF
F
0 to 2047
U \G
10000.0 to (10000+p-1).F (Note-1)
(Note-1): "p" indicates the user setting area points of the Multiple CPU high speed transmission area for
the each CPU.
5 - 24
5 SERVO PROGRAMS FOR POSITIONING CONTROL
<K 12>
Positioning
data
ABS-1
Axis
Speed
Cancel
1,
U3E0\G10400
U3E0\G10402
U3E0\G10104.1
Indirect setting by bit device
Fig. 5.5 Example of indirect setting by bit device for positioning data
(3) Inputting of positioning data
In indirect setting by word devices, the word device data is inputted when the
servo program is executed using the Motion CPU.
It must be executed the start request of the servo program after data is set in the
device used for indirect setting at the positioning control.
POINTS
(1) Indirect setting by word devices of the axis No. cannot be set in the servo
program.
(2) Take an interlock condition by using a start accept flag (M2001 to M2032) not to
change the device data for indirect setting until the specified axis has accepted
the start command.
If the data is changed before the start command is accepted, positioning may
not be controlled in a normal value.
(3) Refer to Chapter 2 of the "Q173DCPU/Q172DCPU Motion controller
Programming Manual (COMMON)" for the user setting area points of the
Multiple CPU high speed transmission area.
5 - 25
5 SERVO PROGRAMS FOR POSITIONING CONTROL
(4) Program example that uses the Multiple CPU high speed
transmission memory
Program example to control by the data transmitted from the PLC CPU to Motion
CPU is shown below.
Program that starts the servo program (positioning) by the DP.SVST instruction after the data is
written to the Multiple CPU high speed transmission memory (U3E0\G10000 to U3E0\G10003)
from the PLC CPU (CPU No.1).
Ladder (PLC CPU side)
M0
DMOVP K10000
U3E0\G10000
Servo program
K10 position
command
Instruction
execution
command
DMOVP K10000
U3E1
\G516.0
U3E0\G10002
Servo program
K10 speed
command
DP.SVST H3E1 "J1" K10 M100 D100
Start accept
flag of CPU
No.2(Axis 1)
RST M0
Instruction
execution
command
Servo program (Motion CPU side)
K10: REAL
1 INC-1
Axis 1, U3E0\G10000
Speed
m
U3E0\G10002 mm/min
5 - 26
6 POSITIONING CONTROL
6. POSITIONING CONTROL
This section describes the positioning control methods.
6.1 Basics of Positioning Control
This section describes the common items for positioning control, which is described in
detail after Section 6.2.
6.1.1 Positioning speed
The positioning speed is set using the servo program.
Refer to Chapter 5 for details of the servo programs.
The real positioning speed is set in the positioning speed and speed limit value using
the servo program is shown below:
• If the positioning speed setting is less than speed limit value, the positioning is
executed with the setting positioning speed.
• If the positioning speed setting is less than speed limit value, the positioning is
executed with the positioning speed.
Example
(1) If the speed limit value is 120000[mm/min] and the positioning speed setting is
100000[mm/min], the positioning speed is as follows.
V
120000
Speed limit value
Positioning speed
100000
t
Acceleration time of
parameter block
Deceleration time of
parameter block
(2) If the speed limit value is 100000[mm/min] and the positioning speed setting is
120000[mm/min], the positioning speed is as follows.
V
Positioning speed
120000
Speed limit value
(Real positioning speed)
100000
t
Acceleration time of
parameter block
6-1
Deceleration time of
parameter block
6
6 POSITIONING CONTROL
6.1.2 Positioning speed at the interpolation control
The positioning speed of the Motion CPU sets the travel speed of the control system.
(1) 1 axis linear control
Travel speed is the positioning speed of the specified axis at the 1 axis
positioning control.
(2) Linear interpolation control
Positioning is controlled with the speed which had the control system specified at
the interpolation control.
The positioning speed can be set using one of the following three methods at the
2 to 4 axes linear interpolation control:
• Vector speed specification
• Long-axis speed specification
• Reference-axis speed specification
Control method of the Motion CPU control for every specified method is shown
below.
(a) Vector speed specification
The Motion CPU calculates the positioning speed of each axis (V1 to V2)
using the travel value (D1 to D4) of each axis based on the positioning speed
(V) of the setting control system.
Positioning speed of the control system is called the vector speed.
Set the vector speed and the travel value of each axis in the servo program.
Example
2 axes linear interpolation control is shown below.
Axis 2
<K 50>
(10000, 15000)
0
ABS-2
Axis
Axis
Vector speed
V
V2
0
V1
[Program example]
1,
2,
10000
15000
7000
[PLS]
[PLS]
[PLS/s]
Axis 1
Axis 1 travel value: D1 = 10000[PLS]
Axis 2 travel value: D2 = 15000[PLS]
Vector speed: V = 7000[PLS/s]
The Motion CPU calculates the positioning speed of each axis using the following
calculation formulas in the above condition:
Axis 1 positioning speed : V1 = V
Axis 2 positioning speed : V2 = V
6-2
D1 /
D2 /
D1 2 + D2 2
D1 2 + D2 2
6 POSITIONING CONTROL
(b) Long-axis speed specification
It is controlled based on the positioning speed (Long-axis speed: V) of the
largest travel value axis among address set as each axis.
The Motion CPU calculates the positioning speed of other axes (V1 to V3)
using the each axis travel value (D1 to D4).
Set the long-axis speed and the travel value of each axis using the servo
program.
Example
4 axes linear interpolation control is shown below.
Axis 1 travel value: D1 = 10000[PLS]
[Program example]
Axis 2 travel value: D2 = 15000[PLS]
<K 51>
Axis 3 travel value: D3 = 5000[PLS]
ABS-4
Axis 4 travel value: D4 = 20000[PLS]
Axis
1,
Long-axis speed: V = 7000[PLS/s]
Axis
2,
Axis
3,
Axis
4,
Long-axis speed
In this example, since the reference axis
is axis 4 of the largest travel value, it is
controlled with the positioning speed
specified with axis 4.
The Motion CPU calculates the
positioning speed of other axes using the
following calculation formulas:
Axis 1 positioning speed : V1 = D1 / D4
Axis 2 positioning speed : V2 = D 2 / D4
Axis 3 positioning speed : V3 = D 3 / D 4
10000
15000
5000
20000
7000
[PLS]
[PLS]
[PLS]
[PLS]
[PLS/s]
V
V
V
The following conversions are performed if the control units of each axis
differ.
1) Combination of axes set in [mm] and [inch]
a) If the interpolation control units are [mm]
• Travel value: Convert the travel value of axis set in [inch] into [mm]
using the formula: inch setting value 25.4.
• Speed
: The largest travel value axis is controlled with the longaxis speed and the other axes are controlled with the
speed based on the long-axis speed, as the result of
conversion.
b) If the interpolation control units are [inch]
• Travel value: Convert the travel value of axis set in [mm] into [inch]
using the formula: mm setting value 25.4.
• Speed
: The largest travel value axis is controlled with the longaxis speed and the other axes are controlled with the
speed based on the long-axis speed, as the result of
conversion.
6-3
6 POSITIONING CONTROL
2) Discrepancy between interpolation control units and control units
• Travel value: The travel value of each axis is converted into [PLS] unit
with the electronic gear of self axis.
• Speed
: The largest travel value axis is controlled with the longaxis speed and the other axes are controlled with the
speed based on the long-axis speed, as the result of
conversion.
The positioning speed is converted into [PLS/s] unit as
the long-axis speed with the electronic gear that the
interpolation control units correspond to control units.
6-4
6 POSITIONING CONTROL
POINTS
(1) Speed limit value and positioning speed
• The setting speed limit value applies to the long-axis speed.
• Be careful that the vector speed may exceed the speed limit value at the longaxis speed specification.
Example
The following settings at the 2 axes linear interpolation, the vector speed
exceeds the speed limit value.
Axis 1 travel value : 100 [PLS]
Axis 2 travel value : 200 [PLS]
Long-axis speed : 50 [PLS/s]
<K 2>
Speed limit value : 55 [PLS/s]
In this example, since the reference-axis
is axis 2 of the largest travel value, it is
controlled with the speed limit value specified
with axis 2.
The positioning speed and vector speed
for each axis are as follows:
Axis 1 positioning speed : 100/ 200 50 =
25 [PLS/s]
Axis 2 positioning speed : 50 [PLS/s]
2
2
Vector speed : 25 + 50 = 55.9[PLS/s]
INC-2
Axis
1,
Axis
2,
Long-axis speed
100
200
50
[PLS]
[PLS]
[PLS/s]
Vector speed
Axis 1 positioning
speed
Axis 2 positioning speed
The vector speed exceeds the speed limit value setting of 55.
(2) Relationship between speed limit value, acceleration time, deceleration time
and rapid stop deceleration time.
• The real acceleration time, deceleration time and rapid stop deceleration
time are set by the setting long-axis speed.
Speed limit value
Speed
Positioning speed(long-axis speed)
Rapid stop cause occurrence
1)
5)
3)
6)
2)
1) Real acceleration time
2) Setting acceleration time
3) Real deceleration time
Time
4) Setting deceleration time
5) Real rapid stop deceleration time
6) Setting rapid stop deceleration time
4)
(c) Reference-axis speed specification
The Motion CPU calculates the positioning speed of other axes (V1 to V3)
based on the positioning speed (reference-axis speed : V) of the setting
reference-axis using the each axis travel value (D1 to D4).
Set the reference-axis No., reference-axis speed and each axis travel value
using the servo program.
6-5
6 POSITIONING CONTROL
Example
4 axes linear interpolation control is shown below.
[Program example]
Axis 1 travel value: D1 = 10000 [PLS]
Axis 2 travel value: D2 = 15000 [PLS]
<K 52>
Axis 3 travel value: D3 = 5000 [PLS]
ABS-4
Axis 4 travel value: D4 = 20000 [PLS]
Axis
1,
Axis
2,
Reference axis speed: V = 7000 [PLS/s]
Axis
3,
Reference axis: Axis 4
Axis
4,
In this example, since the reference-axis
is axis 4, it is controlled with the positioning
speed specified with axis 4.
The Motion CPU calculates the positioning
speed of other axes using the following
calculation formulas:
Reference-axis speed
Reference-axis
10000
15000
5000
20000
70000
4
[PLS]
[PLS]
[PLS]
[PLS]
[PLS/s]
Axis 1 positioning speed : V1 = D1 / D4 V
Axis 2 positioning speed : V2 = D2 / D 4 V
Axis 3 positioning speed : V3 = D3 / D 4 V
POINTS
(1) Reference-axis speed and positioning speed of other axes
• Be careful that the positioning speed of an axis for a larger travel value than
the reference-axis may exceed the setting reference-axis speed.
(2) Indirect specification of the reference-axis
• The reference-axis can be set indirectly using the word devices.
(Refer to Section 5.4.2.)
(3) Relationship between speed limit value, acceleration time, deceleration time
and rapid stop deceleration time.
• The real acceleration time, deceleration time and rapid stop deceleration
time are set by the reference-axis speed setting
Speed limit value
Positioning speed (reference-axis speed)
Rapid stop cause occurrence
Speed
1)
5)
3)
6)
2)
4)
6-6
1) Real acceleration time
2) Setting acceleration time
Time 3) Real deceleration time
4) Setting deceleration time
5) Real rapid stop deceleration time
6) Set rapid stop deceleration time
6 POSITIONING CONTROL
(3) Circular interpolation control
The angular speed is controlled with the setting speed at the circular interpolation
control.
Control with the setting speed
6.1.3 Control units for 1 axis positioning control
It is controlled in the control units specified with the fixed parameters at the 1 axis
positioning control.
(The control unit specified with the parameter block is ignored.)
6.1.4 Control units for interpolation control
(1) The interpolation control units specified with the parameter block and the control
units of the fixed parameter are checked.
If the interpolation control units specified with the parameter block differ from the
control units of the each axis fixed parameter for the interpolation control, it shown
below.
Interpolation control units in the parameter block
mm
Condition for
normal start
Condition for
unit mismatch error
(Error code [40])
inch
degree
There are axes
There are axes whose control
unit set in the fixed parameter is whose control
unit set in the
[mm] and [inch].
fixed parameter
is [degree].
PLS
Starting method
There are axes Positioning control starts by the interpolation
whose control control units of parameter block.
unit set in the
fixed parameter
is [PLS].
• If the control units of axes to be interpolationcontrolled are the same, control starts in the
preset control unit.
• If the control units of axes to be interpolationcontrolled are different, control starts in the unit
of highest priority as indicated below.
Control units of the fixed parameter for all axes differ from the
interpolation control units specified with parameter block.
Priority: PLS > degree > inch > mm
<Example>
If axis is set to 1000[PLS] and 10.000[inch],
10.000[inch] setting is considered to be
10000[PLS].
6-7
6 POSITIONING CONTROL
(2) The combinations of each axis control units for interpolation control are shown in
the table below.
Mm
inch
degree
PLS
mm
1)
2)
3)
3)
inch
2)
1)
3)
3)
degree
3)
3)
1)
3)
PLS
3)
3)
3)
1)
Remarks
1): Same units
2): Combination of [mm] and [inch]
3): Unit mismatch
(a) Same units ( 1) )
The position command is calculated with the setting address (travel value),
positioning speed or electronic gear, the positioning is executed.
POINT
If control units for one axis are "degrees" at the circular interpolation control, use
"degrees" also for the other axis.
(b) Combination of [mm] and [inch] ( 2) )
• If interpolation control units are [mm], positioning is controlled by calculating
position commands from the address, travel value, positioning speed and
electronic gear, which have been converted to [mm] using the formula: inch
setting value 25.4 = mm setting value.
• If interpolation control units are [inch], positioning is controlled by
calculating position commands from the address, travel value, positioning
speed and electronic gear, which have been converted to [inch] using the
formula: mm setting value 25.4 = inch setting value.
(c) Discrepancy units ( 3) )
• The travel value and positioning speed are calculated for each axis.
a) The electronic gear converts the travel value for the axis to [PLS].
b) For axis where the units match, the electronic gear converts the
positioning speed to units of [PLS/s].
Positioning is conducted using position commands calculated from
travel values converted to [PLS] and speeds and electronic gear
converted to [PLS/s].
• If the interpolation control units match for two or more axes at the 3-axes or
more linear interpolation, the positioning speed is calculated with the
electronic gear for the axis with the lowest No.
6-8
6 POSITIONING CONTROL
6.1.5 Control in the control unit "degree"
If the control units are "degree", the following items differ from other control units.
(1) Current value address
The current addresses in the control unit "degree" are ring addresses from 0° to
360°.
359.99999 359.99999
0
0
0
(2) Stroke limit valid/invalid setting
The upper/lower limit value of the stroke limit in the control unit "degree" is within
the range of 0° to 359.99999°
(a) Stroke limit is valid
Set the "lower limit value to upper limit value of the stroke limit" in a
clockwise direction to validate the stroke limit value.
0
Clockwise
315.00000
Area A
90.00000
Area B
1) If travel range in area A is set, the limit values are as follows:
a) Lower stroke limit value: 315.00000°
b) Upper stroke limit value: 90.00000°
2) If travel range in area B is set, the limit values are as follows:
a) Lower stroke limit lower limit value: 90.00000°
b) Upper stroke limit upper limit value: 315.00000°
(b) Stroke limit is invalid
Set the "upper stroke limit value" equal to "lower stroke limit value" to
invalidate the stroke limit value.
It can be controlled regardless the stroke limit settings.
POINTS
(1) Circular interpolation including the axis which set the stroke limit as invalid
cannot be executed.
(2) When the upper/lower limit value of the axis which set the stroke limit as valid
are changed, perform the home position return after that.
(3) When the stroke limit is set as valid in the incremental data system, perform
the home position return after power supply on.
6-9
6 POSITIONING CONTROL
(3) Positioning control
Positioning control method in the control unit "degree" is shown below.
(a) Absolute data method (ABS instructions)
Positioning in a near direction to the specified address is performed based
on the current value.
Example
(1) Positioning is executed in a clockwise direction to travel from the current value
of 315.00000°to 0°.
(2) Positioning is executed in a counter clockwise direction to travel from the
current value of 0° to 315.00000°.
315.00000
0
0
0
315.00000
0
315.00000
315.00000
POINTS
(1) The positioning direction of absolute data method is set a clockwise/counter
clockwise direction by the setting method of stroke limit range, positioning in the
shortest direction may not be possible.
Example
Travel from the current value 0° to 315.00000°must be clockwise positioning
if the lower stroke limit value is set to 0°and the upper limit value is set to
345.00000°.
345.00000
0
315.00000
Clockwise positioning
(2) Set the positioning address within the range of 0° to 360°.
Use the incremental data method for positioning of one revolution or more.
(b) Incremental data method (INC instructions)
Positioning by the specified travel value to the specified direction.
The travel direction is set by the sign of the travel value, as follows:
1) Positive travel value ................Clockwise rotation
2) Negative travel value...............Counter clockwise rotation
POINT
Positioning of 360° or more can be executed in the incremental data method.
6 - 10
6 POSITIONING CONTROL
6.1.6 Stop processing and restarting after stop
This section describes the stop processing after a stop cause is input during
positioning and restarting after stop.
(1) Stop processing
(a) Stop processing methods
Stop processing during positioning by stop cause are as follows.
1) Deceleration stop (Process 1).......Deceleration stop by "stop deceleration
time" of parameter block.
Speed limit value
Stop cause
Operation speed
Stop
Real deceleration time
"Stop deceleration time" of
parameter block
2) Rapid stop (Process 2)..................Deceleration stop by "rapid stop
deceleration time" of parameter block.
Stop cause
Stop
Real deceleration time
"Rapid stop deceleration
time" of parameter block
3) Immediate stop (Process 3)...........Stop without deceleration processing.
Stop cause
Stop
6 - 11
6 POSITIONING CONTROL
4) Stop using the manual pulse generator (Process 4)
..................Deceleration stop by the "deceleration time" of
(Smoothing magnification + 1) 56.8[ms].
(b) Priority for stop processing
Priority for stops when a stop cause is input is as follows:
Process 1 < Process 2 < Process 3
Example
A rapid stop is started if a rapid stop cause is input during one of the following types
of deceleration stop processing :
• After automatic deceleration start during positioning control;
• During deceleration after JOG start signal turns off;
• During deceleration stop processing by stop cause (Process 1).
Deceleration stop processing
Rapid stop cause
Rapid stop deceleration
processing
Stop
6 - 12
6 POSITIONING CONTROL
(c) Stop commands and stop causes
Some stop commands and stop causes affect individual axis and others
affect all axes.
However, during interpolation control, stop commands and stop causes
which affect individual axis also stop the interpolation axis.
For example, both Axis 1 and Axis 2 stop after input of a stop command
(stop cause) during the Axis 1 and Axis 2 interpolation control.
No.
Stop cause
Axis
classification
Stop processing
Positioning
control
Speed
control
Jog
operation
Home position Manual pulse
return
generator
1
STOP signal input (STOP) of
the Q172DLX ON
Process 1 or Process 2
• According to deceleration processing on STOP input
parameter of parameter block.
2
Stop command
"M3200 + 20n" ON
Process 1
3
Rapid stop command
"M3201 + 20n" ON
4
FLS input signal OFF of
Q172DLX/servo amplifier
5
RLS input signal OFF of
Q172DLX/servo amplifier
6
Servo error detection
"M2408 +20n" ON
Process 3
7
PLC ready flag M2000 OFF
Process 1
8
Deceleration stop using
MT Developer (Note-1)
Process 1
9
Rapid stop of the all axes using
MT Developer (Note-1)
Process 2
10
Motion CPU stop
Individual
Error processing
Process 4
Process 2
Process 1 or Process2
• According to deceleration processing on STOP input
parameter of parameter block.
Refer to "APPENDIX 1 Error
Codes Stored Using The
Motion CPU"
Process 4
Process 1
All axes
11
Multiple CPU system reset
12
Motion CPU WDT error
Process 3
13
Other CPU WDT error
Process 1
—
14
Multiple CPU system power off
Process 3
—
15
Forced stop
Process 3
Servo amplifier is stopped at
the servo OFF.
16
Servo amplifier power off
Process 3
Major error at the start
(no servo)
17
Speed change to speed "0"
Individual
Individual
(Note-2)
Process 3
—
SM512 (Motion CPU WDT
error flag) ON
Process 1
—
—
(Note-1): Test mode
(Note-2): Applies to all axes used in the servo program set in the speed "0".
6 - 13
6 POSITIONING CONTROL
(2) Re-starting after stop
(a) If it stopped by the stop command or stop cause (except change speed to
speed "0"), re-starting is not possible.
However, it stopped by the STOP input of the Q172DLX ON, the stop
command (M3200+20n) ON or the rapid stop command (M3201+20n) ON
during speed/position switching control, re-starting is possible using
VPSTART instruction.
(b) If it stopped by the speed change to speed "0" using CHGV instruction, restarting is possible by executing the speed change to speed other than "0".
V
Speed before speed change
Speed after re-starting
2)
Servo program start
Start accept flag
(M2001 to M2032)
t
Re-starting
Stop by the speed
change to speed "0"
ON
OFF
1)
3)
CHGV instruction
Speed changing flag
(M2061+n)
Stop command
(M3200+20n)
1) The start accept flag (M2001 to M2032) remains on after stop by the
speed change to "0".
2) Re-starting by changing the speed again.
3) However, if the start accept flag (M2001 to M2032) turns off by turning
on the stop command (M3200+20n), re-starting is not possible even if
make a speed change once again.
6 - 14
6 POSITIONING CONTROL
(3) Continuation of positioning control
This section describes the processing which performed servo program No. which
was being performed before the stop, after stop by turning on the STOP input of
the Q172DLX ON, the stop command (M3200+20n) ON or the rapid stop
command (M3201+20n) ON.
(a) 1 axis linear control/2 or 3 axes linear interpolation control
1) For ABS ....... Positioning control from the stop address to target
address by the target address specification.
Axis 2
Stop position by
stop command
Target address
Start address 2 after stop
Start address 1
Axis 1
2) For INC ........ Positioning control of the travel value from the stop
address.
Axis 2
Stop position by stop
command
Travel from address 1
Travel from address 2
Address 2 (start address after stop)
Address 1 (start address)
Axis 1
When the address 2 is moved to the same address (address which
calculates with start address + specified travel value) using the INC, the
following processing using the servo program and Motion SFC program is
required.
[Servo Program]
The travel value of servo program which executes the positioning from
address is set indirectly by the word devices, as follows.
<K 10>
INC-2
Axis
Axis
Vector speed
Travel value
1,
2,
D3000
D3002
5000
6 - 15
6 POSITIONING CONTROL
[Processing in the Motion SFC Program]
1. Transfer the start address to word devices of the Motion CPU before
starting.
2. Calculate the target address by applying the travel value to the address
before starting.
3. Calculate the residual travel value by subtracting the stop address from
the target address.
4. Store the residual travel value in the servo program for travel value
register.
5. Perform the servo program.
Axis 2
Stop position by stop command
[Address 2 (start address after stop)]
Address 1
(start address)
Travel value from
Address 2 (Note)
Travel value from Address 1
6 - 16
Travel value from
Address 2 (Note)
Travel
value from
Address 1
Axis 1
(Note): Store in registers for travel value.
6 POSITIONING CONTROL
6.1.7 Acceleration/deceleration processing
Acceleration/deceleration are processed by the following two methods.
(1) Trapezoidal acceleration/deceleration processing
This is a conventional linear acceleration/deceleration processing.
The acceleration/deceleration graph resembles a trapezoid, as shown in the
diagram below.
V
Positioning speed
0
Acceleration time
Deceleration time
t
Time
(2) S-curve acceleration/deceleration processing
S-curve ratio is set as a parameter to provide gentler acceleration and
deceleration than trapezoidal processing. The acceleration/deceleration graph is
sinusoidal, as shown in the diagram below.
Set the S-curve ratio in the parameter block (Refer to Section 4.3.2) or using the
servo program.
V
Positioning speed
t
Time
0
Acceleration time
Deceleration time
S-curve ratio set the part of the sine curve used to produce the acceleration and
deceleration curve as shown in the diagram below.
A
V
B
B/2
(Example)
Positioning
speed
B/2
t
S-curve ratio 100[%]
V
sine curve
S-curve ratio = B/A 100[%]
6 - 17
Positioning
speed
b
b/a = 0.7
a
t
S-curve ratio 70[%]
6 POSITIONING CONTROL
S-curve ratio can be set by the servo program is following two methods.
(a) Direct specification
S-curve ratio is set directly as a numeric value from 0 to 100.
<K 10>
INC-2
Axis
Axis
Vector speed
S-curve ratio
100000
250000
1000
80
1,
2,
2 axes linear positioning control
Axis used . . . . . . . . . . Axis 1, Axis 2
Axis 1 . . . 100000
Travel value to . . . . . . .
Axis 2 . . . 250000
stop position
Positioning speed . . . . 1000
S-curve ratio . . . . . . . . 80[%]
(b) Indirect specification
S-curve ratio is set by the contents of data registers.
The usable data registers are shown below.
Word devices
Usable devices
D
0 to 8191
W
0 to 1FFF
#
0 to 7999
U \G
10000 to (10000+p-1) (Note-1)
(Note-1): "p" indicates the user setting area points of the Multiple CPU high speed transmission
area for the each CPU.
<K 10>
ABS-1
Axis
Speed
S-curve ratio
1,
30000
400000
D3487
1 axis linear positioning control
Axis used . . . . . . . . . . . . . Axis 1, Axis 2
Positioning address . . . . . 30000
Positioning speed . . . . . . . 400000
Indirect specification by word devices
POINT
Refer to Chapter 2 of the "Q173DCPU/Q172DCPU Motion controller
Programming Manual (COMMON)" for the user setting area points of the Multiple
CPU high speed transmission area.
6 - 18
6 POSITIONING CONTROL
6.2 1 Axis Linear Positioning Control
Positioning control from the current stop position to the fixed position for specified axis
is executed.
Positioning is controlled using ABS-1 (Absolute data method) or INC-1 (Incremental
data method) servo instructions.
WAIT-ON/OFF
Cancel
Speed change
S-curve ratio
Deceleration processing on stop input
Others
Allowable error range for circular interpolation
Rapid Stop deceleration time
Torque limit value
Deceleration time
Speed limit value
Acceleration time
Control unit
Central point
Auxiliary point
Torque limit value
M-code
Incremental
Command speed
INC-1
Dwell time
Absolute
Address/travel value
ABS-1
Parameter block
Number of
control axes
Axis
Positioning
method
Parameter block No.
Servo
instruction
Arc
Radius
Items set using MT Developer
Common
Valid
1
: Must be set
: Set if required
[Control details]
Control using ABS-1 (Absolute data method)
(1) Positioning control from the current stop address (pre-positioning address) based
on the home position to the specified address is executed.
(2) The travel direction is set by the current stop address and the specified address.
Example
When the current stop address is 1000, and the specified address is 8000.
Current stop address
0
1000
Home position
Specified address
8000
Positioning control
Fig.6.1 Positioning using absolute data method
6 - 19
6 POSITIONING CONTROL
Control using INC-1 (Incremental data method)
(1) Positioning control of the specified travel value from the current stop position
address is executed.
(2) The travel direction is set by the sign (+/ -) of the travel value, as follows:
• Positive travel value .............Positioning control to forward direction
(Address Increase direction)
• Negative travel value............Positioning control to reverse direction
(Address decrease direction)
Current stop address
Reverse
direction
Forward
direction
Travel direction for
positive travel value
Travel direction for
negative travel value
Example
When the current stop address is -3000, and the travel value is -5000.
Current stop address
-3000 -2000 -1000
-8000
0
Home position
Travel value = -5000
Fig.6.2 Positioning using incremental data method
[Program]
Servo program No. 0 for positioning control is shown as the following conditions.
(1) System configuration
1 axis linear positioning control of Axis 4.
Motion CPU control module
Q61P Q03UD Q172D QX41
CPU
CPU
QY41 Q172D
LX
Positioning start command (PX000)
AMP
Axis
1 M
AMP
Axis
2 M
AMP
Axis
3 M
AMP
Axis
4 M
(2) Positioning operation details
Positioning using the servo program No.0 is shown below.
In this example, Axis 4 is used in servo program No.0.
Home position
0
Current stop address Positioning address using the servo program No.0
1000
80000
6 - 20
6 POSITIONING CONTROL
(3) Operation timing
Operation timing for the servo program No.0 is shown below.
V
10000
Servo Program No.0
t
PLC ready flag (M2000)
All axes servo ON command
(M2042)
All axes servo ON accept flag
(M2049)
Axis 4 servo ready (M2475)
Start command (PX000)
Servo program start
Axis 4 start accept flag
(M2004)
(4) Servo program
Servo program No.0 for positioning control is shown below.
<K
0>
INC-1
Axis
Speed
4,
80000
10000
1 axis linear positioning control
Axis used . . . . . . . . . . . Axis 4
Travel value to . . . . . . . . 80000
stop position
Command speed . . . . . . 10000
(5) Motion SFC program
Motion SFC program for which executes the servo program is shown below.
1 axis linear positioning control
1 axis linear positioning control
[F10]
[G10]
[K0]
[G20]
SET M2042
Turn on all axes servo ON command.
PX000*M2475
Wait until PX000 and Axis 4 servo ready turn on.
INC-1
Axis
Speed
4,
80000PLS
10000PLS/s
!PX000
1 axis linear positioning control
Axis used . . . . . . . . . . Axis 4
Travel value to . . . . . . . 80000[PLS]
stop position
Command speed . . . . . 10000[PLS/s]
Wait until PX000 turn off after linear positioning
completion.
END
(Note): Example of the above Motion SFC program is started using the automatic start or PLC program.
6 - 21
6 POSITIONING CONTROL
6.3 2 Axes Linear Interpolation Control
Linear interpolation control from the current stop position with the specified 2 axes is
executed.
ABS-2 (Absolute data method) and INC-2 (Incremental data method) servo instructions
are used in the 2 axes linear interpolation control.
Items set using MT Developer
Others
WAIT-ON/OFF
Cancel
Speed change
S-curve ratio
Allowable error range for circular interpolation
Torque limit value
Deceleration processing on stop input
Deceleration time
Speed limit value
Acceleration time
Control unit
Central point
Auxiliary point
Radius
Torque limit value
M-code
Incremental
Command speed
INC-2
Dwell time
Absolute
Address/travel value
ABS-2
Parameter block
Number of
control axes
Axis
Positioning
method
Parameter block No.
Servo
instruction
Arc
Rapid stop deceleration time
Common
Valid
2
: Must be set
: Set if required
[Control details]
Control using ABS-2 (Absolute data method)
(1) 2 axes linear interpolation from the current stop address (X1 or Y1) based on the
home position to the specified address (X2 or Y2) is executed.
6 - 22
6 POSITIONING CONTROL
(2) The travel direction is set by the stop address (starting address) and positioning
address of each axis.
Forward
direction
Y1
Current stop address
(X1, Y1)
Operation for X-axis, Y-axis
linear interpolation
Y-axis travel value
Y2
Positioning address (X2, Y2)
Reverse
direction
0
Reverse
direction
X1
Forward direction
X2
X-axis travel value
(Note)
: Indicates setting data
Example
When the current stop address is (1000, 4000), and the positioning address
is (10000, 2000).
Current stop address
4000
Y-axis travel value
(4000 - 2000 = 2000)
Positioning address
2000
0
1000
5000
10000
X-axis travel value
(10000 - 1000 = 9000)
Fig.6.3 Positioning using absolute data method
6 - 23
6 POSITIONING CONTROL
Control using INC-2 (Incremental data method)
(1) Positioning control from the current stop address to the position which combined
travel direction and travel value specified with each axis is executed.
(2) The travel direction for each axis is set by the sign (+/ -) of the travel value for
each axis, as follows:
• Positive travel value .............Positioning control to forward direction
(Address increase direction)
• Negative travel value............Positioning control to reverse direction
(Address decrease direction)
Forward direction
(Note-1): Forward: Travel direction for
positive travel value
Reverse: Travel direction for
negative travel value
: Indicates setting data
Y1
Y-axis travel value
X1
Reverse
direction
0
Current stop address
Forward direction
X-axis travel value
Reverse
direction
Example
When the X-axis travel value is 6000 and Y-axis travel value is -2000.
X-axis travel value
(Note-2): Current stop address
(-1000, -1000)
Home position
0
(Note-2)
Y-axis travel value
5000
Stop position after
positioning
-3000
Positioning operation
Fig.6.4 Positioning using incremental data method
[Program]
Program for 2 axes linear interpolation control is shown as the following conditions.
(1) System configuration
2 axes linear interpolation control of Axis 3 and Axis 4.
Motion CPU control module
Q61P Q03UD Q172D QX41 QY41 Q172D
CPU
CPU
LX
Positioning start command (PX000)
AMP
Axis
1 M
AMP
Axis
2 M
6 - 24
AMP
Axis
3 M
AMP
Axis
4 M
6 POSITIONING CONTROL
(2) Positioning operation details
The positioning is used the Axis 3 and Axis 4 servomotors.
The positioning operation by the Axis 3 and Axis 4 servomotors is shown in the
diagram below.
Axis 3 positioning
direction
Positioning using the
servo program No.11
(40000, 50000)
Axis 4 positioning
direction
Home position (0, 0)
(3) Positioning conditions
(a) Positioning conditions are shown below.
Servo Program No.
Item
No.11
Positioning speed
30000
(b) Positioning start command ........ PX100 Leading edge (OFF
ON)
(4) Operation timing
Operation timing for 2 axes linear interpolation control is shown below.
V
Servo program No.11
t
PLC ready flag (M2000)
All axes servo ON command
(M2042)
All axes servo ON accept flag
(M2049)
Axis 3 servo ready (M2455)
Axis 4 servo ready (M2475)
Start command (PX000)
Servo program start
Axis 3 start accept flag
(M2003)
Axis 4 start accept flag
(M2004)
6 - 25
6 POSITIONING CONTROL
(5) Servo program
Servo program No.11 for 2 axes linear interpolation control is shown below.
<K 11>
ABS-2
Axis
Axis
Vector speed
50000
40000
30000
3,
4,
2 axes linear interpolation control
Axis used . . . . . . . . . . Axis 3, Axis 4
Axis 3 . . . 50000
Travel value to
......
stop position
Axis 4 . . . 40000
Command positioning speed
Vector speed . . . . . 30000
(6) Motion SFC program
Motion SFC program for which executes the servo program is shown below.
2 axes linear interpolation control
2 axes linear
interpolation control
[F10]
[G10]
[K11]
[G20]
SET M2042
Turn on all axes servo ON command.
PX000*M2455*M2475
Wait until PX000, Axis 3 servo ready and Axis 4 servo
ready turn on.
ABS-2
Axis
Axis
Speed
2 axes linear interpolation control
Axis used . . . . . . . . . . . . Axis 3, Axis 4
Travel value to. . . . . . . . Axis 3 . . . 50000[PLS]
stop position
Axis 4 . . . 40000[PLS]
Command positioning speed
Vector speed . . . . . . . . . 30000[PLS/s]
Wait until PX000 turns off after linear interpolation
completion.
3, 50000PLS
4, 40000PLS
30000PLS/s
!PX000
END
(Note): Example of the above Motion SFC program is started using the automatic start or PLC program.
6 - 26
6 POSITIONING CONTROL
6.4 3 Axes Linear Interpolation Control
Linear interpolation control from the current stop position with the specified 3 axes is
executed.
Others
WAIT-ON/OFF
Cancel
Speed change
S-curve ratio
Allowable error range for circular interpolation
Torque limit value
Deceleration processing on stop input
Rapid stop deceleration time
Deceleration time
Speed limit value
Acceleration time
Control unit
Central point
Auxiliary point
Torque limit value
M-code
Incremental
Command speed
INC-3
Dwell time
Absolute
Address/travel value
ABS-3
Parameter block
Number of
control axes
Axis
Positioning
method
Parameter block No.
Servo
instruction
Arc
Radius
Items set using MT Developer
Common
Valid
3
: Must be set
: Set if required
6 - 27
6 POSITIONING CONTROL
[Control details]
Control using ABS-3 (Absolute data method)
(1) 3 axes linear interpolation from the current stop address (X1, Y1 or Z1) based on
the home position to the specified positioning address (X2, Y2, Z2) is executed.
(2) The travel direction is set by the stop address and specified address of each axis.
Address after positioning
(X2, Y2, Z2)
Forward direction
Forward
direction
Current stop address
(X1, Y1, Z1)
Reverse
direction
Forward direction
0
Home position
Example
Linear interpolation control
of X-axis,Y-axis and Z-axis
Reverse direction
Reverse direction
: Indicates setting data
(Note)
When the current stop address is (1000, 2000, 1000), and the specified
address is (4000, 8000, 4000).
Positioning address
(4000, 8000, 4000)
Forward direction
8000
X-axis, Y-axis and Z-axis linear
interpolation operation
Forward
direction
4000
Current stop address
(1000, 2000, 1000)
2000
1000
0
Home position
1000
4000
Forward direction
Fig.6.5 Positioning using absolute data method
6 - 28
6 POSITIONING CONTROL
Control using INC-3 (Incremental data method)
(1) Positioning control from the current stop address to the position which combined
travel direction and travel value specified with each axis is executed.
(2) The travel direction for each axis is set by the sign (+/ -) of the travel value for
each axis, as follows:
• Positive travel value .............Positioning control to forward direction
(Address increase direction)
• Negative travel value............Positioning control to reverse direction
(Address decrease direction)
Forward direction
(Note)
: Indicates setting data
Y1
Forward
direction
Y-axis travel
value
Z1
Z-axis
travel
value
X1
Current stop address
Reverse
direction
Forward
direction
0
X-axis travel
value
Reverse direction
Reverse direction
Example
When the X-axis travel value is 10000, Y-axis travel value is 5000 and X-axis
value is 6000.
Forward direction
Positioning
operation
Forward direction
6000
Stop position after
positioning
(11300, 6300, 8000)
5000
Z-axis travel
value (6000)
Current stop address
(1300, 1300, 2000)
Home position
5000
10000
X-axis travel value (10000)
Y-axis travel value
(5000)
Forward direction
Reverse direction
Fig.6.6 Positioning using incremental data method
6 - 29
6 POSITIONING CONTROL
[Program]
Program for 3 axes linear interpolation control is shown as the following conditions.
(1) System configuration
3 axes linear interpolation control of Axis 1, Axis 2 and Axis 3.
Motion CPU control module
Q61P Q03UD Q172D QX41
CPU
CPU
QY41 Q172D
LX
Positioning start command (PX000)
AMP
AMP
Axis
1 M
Axis
2 M
AMP
Axis
3 M
AMP
Axis
4 M
(2) Positioning operation details
The positioning is used the Axis 1, Axis 2 and Axis 3 servomotors.
The positioning operation by the Axis 1, Axis 2 and Axis 3 servomotors is shown
in the diagram below.
Axis 3 positioning
direction
Axis 2 positioning direction
(Forward direction)
(50000, 40000, 30000)
(Forward direction)
Positioning using the servo
program No.21.
40000
Axis 1 positioning
direction
30000
(Reverse direction)
Home position
50000 (Forward direction)
(0, 0, 0)
(Reverse direction)
(Reverse direction)
(3) Positioning conditions
(a) Positioning conditions are shown below.
Servo Program No.
Item
No.21
Positioning method
Absolute data method
Positioning speed
1000
(b) Positioning start command ........ PX100 Leading edge (OFF
6 - 30
ON)
6 POSITIONING CONTROL
(4) Operation timing
Operation timing for 3 axes linear interpolation control is shown below.
V
Servo program No.21
t
PLC ready flag (M2000)
All axes servo ON command
(M2042)
All axes servo ON accept flag
(M2049)
Axis 1 servo ready (M2415)
Axis 2 servo ready (M2435)
Axis 3 servo ready (M2455)
Start command (PX000)
Servo program start
Axis 1 start accept flag
(M2001)
Axis 2 start accept flag
(M2002)
Axis 3 start accept flag
(M2003)
(5) Servo program
Servo program No.21 for 3 axes linear interpolation control is shown below.
<K 21>
ABS-3
Axis
Axis
Axis
Vector speed
1,
2,
3,
50000
40000
30000
1000
3 axes linear interpolation control
Axis used . . . . . . . .. Axis 1, Axis 2, Axis 3
Axis1 . . . 50000
Positioning address Axis2 . . . 40000
Axis3 . . . 30000
Command positioning speed
Vector speed . . . 1000
(Note): Example of the Motion SFC program for positioning control is shown next page.
6 - 31
6 POSITIONING CONTROL
(6) Motion SFC program
Motion SFC program for which executes the servo program is shown below.
3 axes linear interpolation control
3 axes linear
interpolation control
[F10]
[G10]
[K21]
[G20]
SET M2042
Turn on all axes servo ON command.
PX000*M2415*M2435*M2455
Wait until PX000, Axis 1 servo ready, Axis 2 servo
ready and Axis 3 servo ready turn on.
ABS-3
Axis
Axis
Axis
Speed
3 axes linear interpolation control
Axis used . . . . . . . . . . . . Axis 1, Axis 2, Axis 3
Axis 1 . . . 50000[PLS]
Positioning address . . . .
Axis 2 . . . 40000[PLS]
Axis 3 . . . 30000[PLS]
Command positioning speed
Vector speed . . . . . . . . 1000[PLS/s]
1, 50000PLS
2, 40000PLS
3, 30000PLS
1000PLS/s
Wait until PX000 turn off after linear interpolation
completion.
!PX000
END
(Note): Example of the above Motion SFC program is started using the automatic start or PLC program.
6 - 32
6 POSITIONING CONTROL
6.5 4 Axes Linear Interpolation Control
Linear interpolation control from the current stop position with 4 axes specified with the
positioning command of the PLC program is executed.
WAIT-ON/OFF
Speed change
Cancel
Allowable error range for circular interpolation
Others
S-curve ratio
Deceleration processing on stop input
Rapid stop deceleration time
Torque limit value
Deceleration time
Acceleration time
Speed limit value
Control unit
Central point
Auxiliary point
Torque limit value
M-code
Incremental
Command speed
INC-4
Dwell time
Absolute
Address/travel value
ABS-4
Parameter block
Number of
control axes
Axis
Positioning
method
Parameter block No.
Servo
instruction
Arc
Radius
Items set using MT Developer
Common
Valid
4
: Must be set
: Set if required
[Control details]
Positioning control which starts and completes the 4 axes simultaneously is executed.
Example
4 axes linear interpolation
V
Travel value
Axis 1
t
V
Axis 2
t
V
Axis 3
t
V
Equal time
6 - 33
Axis 4
t
6 POSITIONING CONTROL
[Program]
Program for 4 axes linear interpolation control is shown as the following conditions.
(1) System configuration
4 axes linear interpolation control of Axis 1, Axis 2, Axis 3 and Axis 4.
Motion CPU control module
Q61P Q03UD Q172D QX41
CPU
CPU
QY41 Q172D
LX
Positioning start command (PX000)
AMP
Axis
1 M
AMP
AMP
Axis
2 M
Axis
3 M
AMP
Axis
4 M
(2) Positioning operation details
The positioning is used the Axis 1, Axis 2, Axis 3 and Axis 4 servomotors.
The positioning by the Axis 1, Axis 2, Axis 3 and Axis 4 servomotors is shown in
the diagram below.
Axis 2
Axis 4
Axis 1
Axis 3
Fig.6.7 Axis configuration
6 - 34
6 POSITIONING CONTROL
Axis 2 positioning
direction
(Forward direction)
Axis 3 positioning
direction
(Forward direction)
Positioning using the servo program
No.22 (Forward direction)
5000
Axis 4 positioning direction
(Forward direction)
5000
(Reverse direction)
5000
Axis 1 positioning
direction
(Forward direction)
(Reverse direction) (Reverse direction)
Fig.6.8 Positioning for 4 axes linear interpolation control
(3) Positioning conditions
(a) Positioning conditions are shown below.
Servo Program No.
Item
No.22
Positioning method
Incremental data method
Positioning speed
10000
(b) Positioning start command ........ PX000 Leading edge (OFF
6 - 35
ON)
6 POSITIONING CONTROL
(4) Operation timing
Operation timing for 4 axes linear interpolation control is shown below.
V
Servo program No.22
t
PLC ready flag (M2000)
All axes servo ON command
(M2042)
All axes servo ON accept Flag
(M2049)
Axis 1 servo ready (M2415)
Axis 2 servo ready (M2435)
Axis 3 servo ready (M2455)
Axis 4 servo ready (M2475)
Start command (PX000)
Servo program start
Axis 1 start accept flag
(M2001)
Axis 2 start accept flag
(M2002)
Axis 3 start accept flag
(M2003)
Axis 4 start accept flag
(M2004)
(5) Servo program
Servo program No.22 for 4 axes linear interpolation control is shown below.
<K 22>
INC-4
Axis
Axis
Axis
Axis
Vector speed
4 axes linear interpolation control
1,
2,
3,
4,
3000
4000
4000
4000
10000
Axis used . . . . Axis 1, Axis 2, Axis 3, Axis4
Travel value to
stop position . . . . . . .
Axis
Axis
Axis
Axis
1
2
3
4
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
3000
4000
4000
4000
Command positioning speed
Vector speed . . . . . . . . . . . . . . 10000
(Note): Example of the Motion SFC program for positioning control is shown next page.
6 - 36
6 POSITIONING CONTROL
(6) Motion SFC program
Motion SFC program for which executes the servo program is shown below.
4 axes linear interpolation control
4 axes linear
interpolation control
[F10]
Turn on all axes servo ON command.
SET M2042
[G10] PX000*M2415*M2435*M2455
*M2475
Wait until PX000, Axis 1 servo ready, Axis 2 servo ready,
Axis 3 servo ready and Axis 4 servo ready turn on.
[K22] INC-4
Axis
Axis
Axis
Axis
Speed
4 axes linear interpolation control
Axis used . . . . . . . Axis 1, Axis 2, Axis 3, Axis 4
Axis 1 . . . 3000[PLS]
Travel value to . . . . . . .
Axis 2 . . . 4000[PLS]
stop position
Axis 3 . . . 4000[PLS]
Axis 4 . . . 4000[PLS]
Command positioning speed
Vector speed . . . . . . . . . . . . . . . 10000[PLS/s]
[G20]
1,
2,
3,
4,
3000PLS
4000PLS
4000PLS
4000PLS
10000PLS/s
Wait until PX000 turn off after linear interpolation
completion.
!PX000
END
(Note): Example of the above Motion SFC program is started using the automatic start or PLC program.
6 - 37
6 POSITIONING CONTROL
6.6 Auxiliary Point-Specified Circular Interpolation Control
Circular interpolation control by specification of the end point address and auxiliary
point address (a point on the arc) for circular interpolation is executed.
Auxiliary point-specified circular uses ABS (Absolute data method) and INC
(Incremental data method) servo instructions.
ABS
Absolute
INC
Incremental
WAT-ON/OFF
Speed change
Cancel
Allowable error range for circular interpolation
Others
S-curve ratio
Deceleration processing on stop input
Rapid stop deceleration time
Deceleration time
Acceleration time
Speed limit value
Control unit
Central point
Auxiliary point
Torque limit value
M-code
Command speed
Dwell time
Address/travel value
Torque limit value
Parameter block
Number of
control axes
Axis
Positioning
method
Parameter block No.
Servo
instruction
Arc
Radius
Items set using MT Developer
Common
Valid
2
: Must be set
: Set if required
[Control details]
(Absolute data method)
Control using ABS
(1) Circular interpolation from the current stop address (address before positioning)
based on the home position through the specified auxiliary point address to the
end point address is executed.
(2) The center of the arc is the point of intersection of the perpendicular bisectors of
the start point address (current stop address) to the auxiliary point address, and
the auxiliary point address to the end point address.
Operation by circular interpolation
Forward direction
End point address (X1, Y1)
Auxiliary point address (X2, Y2)
Reverse
direction
Start point address
(X0, Y0)
Forward direction
0
Arc central point
Reverse direction
(Note)
: Indicates setting data
Fig.6.9 Circular interpolation control using absolute data method
6 - 38
6 POSITIONING CONTROL
31
(3) The setting range of the end point address and auxiliary point address is (-2 ) to
31
(2 -1).
32
(4) The maximum arc radius is 2 -1.
232-1
Maximum arc
0
-231
Radius R
Arc central point
231-1
Fig.6.10 Maximum arc
Control using INC
(Incremental data method)
(1) Circular interpolation from the current stop address through the specified auxiliary
point address to the end point address is executed.
(2) The center of the arc is the point of intersection of the perpendicular bisectors of
the start point address (current stop address) to the auxiliary point address, and
the auxiliary point address to the end point address.
Forward
direction
Positioning speed
End point
Y1
Travel
value to Travel
value to
end point
auxiliary
point
Reverse
direction
Start point
Y2
X1
Auxiliary point
Arc central point
X2
Travel value to auxiliary
point
Travel value to end point
Home
position
Forward direction
(Note)
: Indicates setting data
Fig.6.11 Circular interpolation control using incremental data method
(3) The setting range for the travel value to the end point address and auxiliary point
31
address is 0 to (2 -1).
6 - 39
6 POSITIONING CONTROL
31
(4) The maximum arc radius is 2 -1.
31
If the end point and auxiliary point are set more than a radius of 2 -1, an error
occurs at the start and error code [107] is stored in the data register.
231-1
Maximum arc
Arc central point
0
-231
231-1
Radius R
Fig.6.12 Maximum arc
[Program]
Program for auxiliary point-specified circular interpolation control is shown as the
following conditions.
(1) System configuration
Auxiliary point-specified circular interpolation control of Axis 1 and Axis 2.
Motion CPU control module
Q61P Q03UD Q172D QX41
CPU
CPU
QY41 Q172D
LX
Positioning start command (PX000)
AMP
AMP
Axis
1 M
Axis
2 M
AMP
Axis
3 M
AMP
Axis
4 M
(2) Positioning details
The positioning uses the Axis 1 and Axis 2 servomotors.
The positioning by the Axis 1 and Axis 2 servomotors is shown in the diagram
below.
Axis 2 positioning direction
(Forward direction)
Auxiliary point (40000, 50000)
50000
Positioning using the servo program No.31
30000
20000
End point (80000, 30000)
Start point
(10000,
20000)
0 10000
Arc central
point
40000
6 - 40
80000
Axis 1 positioning direction
(Forward direction)
6 POSITIONING CONTROL
(3) Positioning conditions
(a) Positioning conditions are shown below.
Servo program No.
Item
No.31
Positioning method
Absolute data method
Positioning speed
1000
(b) Positioning start command ........ PX000 Leading edge (OFF
ON)
(4) Operation timing
Operation timing for auxiliary point-specified circular interpolation control is
shown below.
V
Servo program No.31
Vector speed
t
PLC ready flag (M2000)
All axes servo ON command
(M2042)
All axes servo ON accept flag
(M2049)
Axis 1 servo ready (M2415)
Axis 2 servo ready (M2435)
Start command (PX000)
Servo program start
Axis 1 start accept flag
(M2001)
Axis 2 start accept flag
(M2002)
(5) Servo program
Servo program No.31 for auxiliary point-specified circular interpolation control is
shown below.
<K 31>
ABS
Axis
Axis
Speed
Auxiliary
point
Auxiliary
point
1,
80000
30000
1000
40000
2,
50000
1,
2,
Auxiliary point-specified circular interpolation
control
Axis used . . . . . . . . Axis 1, Axis 2
Axis 1 . . . . . . 80000
End point address
Axis 2 . . . . . . 30000
Positioning speed . . . . . . . . . . . . . . 1000
Auxiliary point address
Axis 1 . . . 40000
Axis 2 . . . 50000
(Note): Example of the Motion SFC program for positioning control is shown next page.
6 - 41
6 POSITIONING CONTROL
(6) Motion SFC program
Motion SFC program for which executes the servo program is shown below.
Auxiliary point-specified circular interpolation control
Auxiliary point-specified
circular interpolation control
[F10]
SET M2042
Turn on all axes servo ON command.
[G10] PX000*M2415*M2435
Waits until PX000, Axis 1 servo ready and Axis 2 servo
ready turn on.
[K10] ABS
Axis
Axis
Speed
Auxiliary
point
Auxiliary
point
Auxiliary point-specified circular interpolation control
Axis used. . . . . . . . . . . . . . . Axis 1, Axis 2
Axis 1 . . . 80000[PLS]
End point address . . . . . . .
Axis 2 . . . 30000[PLS]
Positioning speed . . . . . . . . . . . . . . . . . . . . 1000[PLS/s]
Axis 1 . . . 40000[PLS]
Auxiliary point address . . . . .
Axis 2 . . . 50000[PLS]
[G20]
1,
2,
1,
80000PLS
30000PLS
1000PLS/s
40000PLS
2,
50000PLS
Wait until PX000 turn off after circular interpolation
completion.
!PX000
END
(Note): Example of the above Motion SFC program is started using the automatic start or PLC program.
6 - 42
6 POSITIONING CONTROL
6.7 Radius-Specified Circular Interpolation Control
Circular interpolation control by specification of the end point address and radius for
circular interpolation is executed.
, ABS
and
Radius-specified circular interpolation control uses ABS , ABS
(Absolute data method) and INC , INC
, INC
and INC
ABS
(Incremental data method) servo instructions.
Others
WAIT-ON/OFF
Cancel
Speed change
S-curve ratio
Allowable error range for circular interpolation
Torque limit value
Rapid stop deceleration time
Deceleration time
Speed limit value
Acceleration time
Control unit
Central point
Auxiliary point
Torque limit value
M-code
Command speed
Dwell time
Address/travel value
Deceleration processing on stop input
Parameter block
Number of
control axes
Axis
Positioning
method
Parameter block No.
Servo
instruction
Arc
Radius
Items set using MT Developer
Common
ABS
ABS
ABS
Absolute
ABS
Valid
2
INC
INC
INC
Incremental
INC
: Must be set
: Set if required
6 - 43
6 POSITIONING CONTROL
[Control details]
Details for the servo instructions are shown in the table below.
Instruction
Rotation direction of
Maximum controllable
the servomotors
angle of arc
ABS
Positioning path
Positioning path
Start
point
Clockwise
<180
Radius R
INC
0° <
< 180°
ABS
Radius R
Counter clockwise
Start
point
INC
End point
Central point
Central point
<180
End point
Positioning path
Positioning path
ABS
180 <
= <360
Clockwise
INC
< 360°
180°
ABS
Central point
Radius R
Start point
End point
Start point
Radius R
End point
Counter clockwise
Central point
180 <
= <360
INC
Positioning path
Control using ABS
, ABS
, ABS
, ABS
(Absolute data method)
(1) Circular interpolation from the current stop address (address before positioning)
based on the home position to the specified end address with the specified radius
is executed.
(2) The center of the arc is the point of intersection of the perpendicular bisectors of
the start point address (current stop address) to the end address.
Forward direction
Positioning speed
Circular interpolation path
End address (X1, Y1)
Reverse
direction
Radius R
Start point
address (X0, Y0)
Arc central point
Forward direction
0
Reverse direction
(Note)
: Indicates setting data
Fig.6.13 Circular interpolation control using absolute data method
31
31
(3) The setting range of end point address is (-2 ) to (2 -1).
6 - 44
6 POSITIONING CONTROL
31
(4) The setting range for the radius is 1 to (2 -1).
32
(5) The maximum arc radius is (2 -1).
231-1
Maximum arc
0
231-1
-231
Radius R
Arc central point
Fig.6.14 Maximum arc
Control using INC
, INC
, INC
, INC
(Incremental data method)
(1) Circular interpolation from the current stop address (0, 0) to the specified end
point with specified radius.
(2) The center of the arc is the point of intersection of the perpendicular bisectors of
the start point address (current stop address) to the end address.
Forward direction
Circular interpolation path
Positioning
speed
End point
Radius R
Arc central point
Start point
Reverse
direction
Forward direction
0
(Note)
Reverse direction
: Indicates setting data
Fig.6.15 Circular interpolation control using incremental data method
31
31
(3) Setting range of end point address is (-2 ) to (2 -1).
31
(4) Setting range of radius is 1 to (2 -1).
31
(5) Maximum arc radius is (2 -1).
231-1
Maximum arc
Arc central point
0
-231
231-1
Radius R
Fig.6.16 Maximum arc
6 - 45
6 POSITIONING CONTROL
[Program]
Program for radius-specified circular interpolation control is shown as the following
conditions.
(1) System configuration
Radius-specified circular interpolation control of Axis 1 and Axis 2.
Motion CPU control module
Q61P Q03UD Q172D QX41
CPU
CPU
QY41 Q172D
LX
Positioning start command (PX000)
AMP
AMP
Axis
1 M
Axis
2 M
AMP
Axis
3 M
AMP
Axis
4 M
(2) Positioning operation details
The positioning uses the Axis 1 and Axis 2 servomotors.
The positioning by the Axis 1 and Axis 2 servomotors is shown in the diagram
below.
Axis 2 positioning direction
(Forward direction)
Positioning using the servo program
No.41.
50000
30000
End point (100000, 50000)
Start point
(10000, 30000)
(Reverse
direction)
0 10000
Home position
”¼ Œ
a 80000
Radius
80000
(Reverse direction)
100000
Axis 1 positioning direction
(Forward direction)
Arc central point
(3) Positioning conditions
(a) Positioning conditions are shown below.
Servo Program No.
Item
No.41
Positioning method
Absolute data method
Positioning speed
1000
(b) Positioning start command ........ PX000 Leading edge (OFF
6 - 46
ON)
6 POSITIONING CONTROL
(4) Operation timing
Operation timing for radius-specified circular interpolation control is shown below.
V
Servo Program No.41
Vector speed
t
PLC ready flag (M2000)
All axes servo ON command
(M2042)
All axes servo ON accept flag
(M2049)
Axis 1 servo ready (M2415)
Axis 2 servo ready (M2435)
Start command (PX000)
Servo program start
Axis 1 start accept flag
(M2001)
Axis 2 start accept flag
(M2002)
(5) Servo program
Servo program No.41 for radius-specified circular interpolation control is shown
below.
<K 41>
ABS
Axis
Axis
Speed
Radius
1,
2,
100000
50000
1000
80000
Radius specified-circular interpolation
control
Axis used . . . . . Axis 1, Axis 2
End address
Axis 1 . . . 100000
Axis 2 . . . . 50000
Positioning speed . . . . . . . . . 1000
Radius . . . . . . . . . . . . . . . 80000
(Note): Example of the Motion SFC program for positioning control is shown next page.
6 - 47
6 POSITIONING CONTROL
(6) Motion SFC program
Motion SFC program for which executes the servo program is shown below.
Radius specified-circular interpolation control
Radius specified-circular
interpolation control
[F10]
SET M2042
Turn on all axes servo ON command.
[G10] PX000*M2415*M2435
Wait until PX000, Axis 1 servo ready and Axis 2 servo
ready turn on.
[K41]
Radius specified-circular interpolation control
Axis used . . . . . . . . . . . . . . . Axis 1, Axis 2
Axis 1 . . . 100000[PLS]
End point address . . . . . . .
Axis 2 . . . . 50000[PLS]
Positioning speed . . . . . . . . . . . . . . . . . . . . . 1000[PLS/s]
Radius . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80000[PLS]
[G20]
ABS
Axis
Axis
Speed
Radius
1,
2,
100000PLS
50000PLS
1000PLS/s
80000PLS
Wait until PX000 turn off after circular interpolation
completion.
!PX000
END
(Note): Example of the above Motion SFC program is started using the automatic start or PLC program.
6 - 48
6 POSITIONING CONTROL
6.8 Central Point-Specified Circular Interpolation Control
Circular interpolation control by specification of the end point for circular interpolation
and arc central point is executed.
(Absolute
Central point-specified circular interpolation control uses ABS and ABS
and INC
(Incremental data method) servo instructions.
data method) and INC
Items set using MT Developer
ABS
ABS
WAIT-ON/OFF
Cancel
Speed change
S-curve ratio
Allowable error range for circular interpolation
Torque limit value
Deceleration processing on stop input
Deceleration time
Speed limit value
Acceleration time
Control units
Central point
Auxiliary point
Radius
Torque limit value
M-code
Command speed
Dwell time
Address/travel value
Others
Absolute
2
INC
INC
Parameter block
Number of
control axes
Axis
Positioning
method
Parameter block No.
Servo
instruction
Arc/Helical
Rapid stop deceleration time
Common
Valid
Incremental
: Must be set
: Set if required
[Control details]
Details for the servo instructions are shown in the table below.
Instruction
Rotation direction of Maximum controllable
the servomotors
Positioning path
angle of arc
Positioning path
ABS
Start point
Clockwise
INC
0 < <360
End point
Central point
0° <
< 360°
Central point
ABS
Counter clockwise
INC
Start point
0 < <360
End point
Positioning path
6 - 49
6 POSITIONING CONTROL
Control using ABS
, ABS
(Absolute data method)
(1) Circular interpolation of an arc with a radius equivalent to the distance between
the start point and central point, between the current stop address (address before
positioning) based on the home position and the specified end point address.
Operation by circular interpolation
Forward direction
End address (X1, Y1)
Positioning speed
Start point
address (X0, Y0)
Reverse
direction
Radius R
Forward direction
Arc central point
Reverse direction
(Note)
: Indicates setting data
Fig.6.17 Circular interpolation control using absolute date method
(2) Positioning control of a complete round is possible in the central point-specified
circular interpolation control.
Forward direction
Circular interpolation control
Arc central
point
Reverse
direction
Start address, end address
Forward direction
Reverse direction
Fig.6.18 Positioning control of a complete round
31
31
(3) Setting range of end point address and arc central point is (-2 ) to (2 -1).
32
(4) The maximum arc radius is (2 -1).
231-1
Maximum arc
231-1
-231
Arc central point
Radius R
Fig.6.19 Maximum arc
6 - 50
6 POSITIONING CONTROL
, INC
Control using INC
(Incremental method)
(1) Circular interpolation from the current stop address (0, 0) with a radius equivalent
to the distance between the start point (0, 0) and central point.
Forward direction
Operation by circular interpolation (for INC
)
End point
Positioning speed
Start
point
Reverse
direction
Home point
Reverse direction
Forward direction
Arc central point
(Note)
: Indicates setting data
Fig.6.20 Circular interpolation control using incremental data method (INC
(2) Positioning control of a complete round is possible in the central point-specified
circular interpolation control.
Forward direction
Circular interpolation control
Arc central
point
0
0
Reverse
direction
Start address, end address
Forward direction
Reverse direction
Fig.6.21 Positioning control of a complete round
(3) Setting range of travel value to end point address and arc central point is 0 to
31
(2 -1).
31
(4) The maximum arc radius is (2 -1).
31
If the end point and central point are set more than a radius of (2 -1), an error
occurs at the start and error code [109] is stored in the data register.
231-1
Maximum arc
Arc central point
0
-231
231-1
Radius R
Fig.6.22 Maximum arc radius
6 - 51
)
6 POSITIONING CONTROL
[Program]
Program for central point-specified circular interpolation control is shown as the
following conditions.
(1) System configuration
Central point-specified circular interpolation control of Axis 1 and Axis 2.
Motion CPU control module
Q61P Q03UD Q172D QX41
CPU
CPU
QY41 Q172D
LX
Positioning start command (PX000)
AMP
Axis
1 M
AMP
AMP
Axis
2 M
Axis
3 M
AMP
Axis
4 M
(2) Positioning operation details
The positioning uses the Axis 1 and Axis 2 servomotors.
The positioning by the Axis 1 and Axis 2 servomotors is shown in the diagram
below.
Axis 2 positioning direction
(Forward direction)
Positioning using the servo program No.51
Start address
(111459, 30000)
End address
(78541, 30000)
Central point address
(45000, 20000)
30000
20000
0 11459
45000
78541
Axis 1 positioning direction
(Forward direction)
(3) Positioning conditions
(a) Positioning conditions are shown below.
Servo Program No.
Item
No.51
Positioning method
Absolute data method
Positioning speed
1000
(b) Positioning start command ........ PX000 Leading edge (OFF
6 - 52
ON)
6 POSITIONING CONTROL
(4) Operation timing
Operation timing for central point-specified circular interpolation is shown below.
V
Servo Program No.51
Vector speed
t
PLC ready flag (M2000)
All axes servo ON command
(M2042)
All axes servo ON accept flag
(M2049)
Axis 1 servo ready (M2415)
Axis 2 servo ready (M2435)
Start command (PX000)
Servo program start
Axis 1 start accept flag
(M2001)
Axis 2 start accept flag
(M2002)
(5) Servo program
Servo program No.51 for central point-specified circular interpolation is shown
below.
<K 51>
ABS
Axis
Axis
Speed
Central point
Central point
1,
2,
1,
2,
78541
30000
1000
45000
20000
Central point specified-circular interpolation
control
Axis used . . . . . . . . . . . . Axis 1, Axis 2
End address
Axis 1 . . . . . . . . . 78541
Axis 2 . . . . . . . . . 30000
Positioning speed . . . . . . . . . . . . . 1000
Central point address
Axis 1 . . . 45000
Axis 2 . . . 20000
(Note): Example of the Motion SFC program for positioning control is shown next page.
6 - 53
6 POSITIONING CONTROL
(6) Motion SFC program
Motion SFC program for which executes the servo program is shown below.
Central point specified-circular interpolation control
Central point specifiedcircular interpolation control
[F10] SET M2042
Turn on all axes servo ON command.
[G10] PX000*M2415*M2435
Wait until PX000, Axis 1 servo ready and Axis 2 servo
ready turn on.
[K51] ABS
Axis
Axis
Speed
Central point
Central point
Central point specified-circular interpolation control
Axis used . . . . . . . . . . . . . . . Axis 1, Axis 2
Axis 1 . . . . 78541[PLS]
End point address . . . . . . .
Axis 2 . . . . 30000[PLS]
Positioning speed . . . . . . . . . . . . . . . . . . . . . 1000[PLS/s]
Axis 1 . . . . 45000[PLS]
Central point address . . . . . .
Axis 2 . . . . 20000[PLS]
1, 78541PLS
2, 30000PLS
1000PLS/s
1, 45000PLS
2, 20000PLS
Wait until PX000 turn off after circular interpolation
completion.
[G20] !PX000
END
(Note): Example of the above Motion SFC program is started using the automatic start or PLC program.
6 - 54
6 POSITIONING CONTROL
6.9 Helical Interpolation Control
The linear interpolation control with linear axis is executed simultaneously while the
circular interpolation specified with any 2 axes is executed, the specified number of
pitches rotates spirally and performs the locus control to command position.
Items set using MT Developer
Others
WAIT-ON/OFF
Cancel
Speed
change
S-curve ratio
Allowable error range for circular interpolation
Deceleration processing on stop input
Deceleration time
Acceleration time
Speed limit value
Control units
Pitch count
Central point
Radius
Auxiliary point
Torque limit value
M-code
Dwell time
Command speed
Address/travel value
Torque limit value
Parameter block
Number of
control axes
Axis
Positioning
method
Parameter block No.
Servo
instruction
Arc/Helical
Rapid stop deceleration time
Common
ABH
ABH
Absolute
ABH
ABH
INH
INH
Incremental
INH
3
Valid
INH
ABH
Absolute
ABH
INH
Incremental
INH
ABH
Absolute
INH
Incremental
: Must be set
: Set if required
6 - 55
6 POSITIONING CONTROL
6.9.1 Circular interpolation specified method by helical interpolation
The following method of circular interpolation is possible for the helical interpolation.
The specified method of circular interpolation connected start point and end point at
the seeing on the plane for which performs circular interpolation are as follows.
Servo instruction
Positioning method
Circular interpolation specified method
ABH
Absolute
Radius-specified method
INH
Incremental
less than CW180°
ABH
Absolute
Radius-specified method
INH
Incremental
less than CCW180°
ABH
Absolute
Radius-specified method
INH
Incremental
CW180° or more.
ABH
Absolute
Radius-specified method
INH
Incremental
CCW180° or more.
ABH
Absolute
INH
Incremental
ABH
Absolute
INH
Incremental
ABH
Absolute
INH
Incremental
Central point-specified method CW
Central point- specified method CCW
Auxiliary point-specified method
[Cautions]
(1) The helical interpolation instruction can be used at the both of real mode/virtual
mode.
(2) When the number of pitches is 0 and travel value of linear axis is not "0" is set,
operation example is shown below.
Circular interpolation path
Linear axis operation
Start point (X0, Y0, Z0)
Linear axis operates
so that it may become
a position according
to this angle.
Arc center
End point (X1, Y1, Z1)
Condition
Number of pitches is 0
Operation
Control on the circular plane.
Number of pitches is not 0 Rotation spirally of the number of pitches to linear axis direction.
6 - 56
6 POSITIONING CONTROL
(3) When the travel value of linear axis is "0" is set, it can be controlled.
Condition
Number of pitches is 0
Operation
Same control as normal circular interpolation control.
(Allowable error range for circular interpolation can be set.)
Linear interpolation to linear axis does not executed, circle for the
Number of pitches is not 0 number of pitches is drawn on the circle plane.
(Allowable error range for circular interpolation can be set.)
(4) Units for linear axis have not restrictions.
(5) Circular interpolation axis has the following restrictions.
• When the unit of one axis is [degree] axis (with stroke range), set another axis
also as [degree] axis (without stroke range).
• The axis of [degree] unit as without stroke range cannot be set.
• The axis as without stroke range cannot be set in the virtual mode.
(6) Specified the speed which executes speed change by CHGV instruction during
helical interpolation operation with the vector speed of circular interpolation axis 2.
If speed change is requested by specifying negative speed by CHGV instruction
during helical interpolation operation, deceleration starts from the time and it is
possible to return to reverse direction at the deceleration completion.
(7) If start point = end point, number of pitches = 1 and travel value of linear axis = 0,
at the only central point-specified circular interpolation, full circle can be drawn.
When the address of "start point = end point" is set at the radius-specified helical
interpolation or auxiliary point-specified helical interpolation, a minor error (error
code [108]) occurs at the start and cannot be start.
(8) When the control unit is [degree] and the stroke limit is invalid, if the helical
interpolation control is executed using absolute data method, positioning in near
direction to specified address based on the current value.
(9) Allowable error range for circular interpolation can be set.
6 - 57
6 POSITIONING CONTROL
ABH , ABH
control
, ABH
, ABH
Absolute radius-specified helical interpolation
[Control details]
The linear interpolation to other linear axis is executed performing 2 axes circular
interpolation from current stop position (X0, Y0, Z0) to specified circular end address
(X1, Y1) or linear axis end point address (Z1), and the absolute helical interpolation is
executed so that it may become a spiral course.
It goes around on the specified circle for the specified number of pitches, the circular
interpolation which had remainder specified is executed, and positioning to end
address is executed. The radius-specified circle specifies circular interpolation method
connected start point and end point at the seeing on the plane for which performs
circular interpolation.
Operation details for absolute radius-specified helical interpolation are shown below.
End point address (X1, Y1, Z1)
Circular interpolation plane
End point address (X1, Y1)
Linear interpolation
travel value = Z1-Z0
Helical interpolation
path
Number of pitches a
Circular interpolation
plane
Positioning speed V1
Central
angle
Radius R
Start point (X0, Y0)
Start point (X0, Y0, Z0)
(Note)
(Note)
: Indicates setting data
: Indicates setting data
Control details for the servo instructions are shown below.
Instruction
Rotation direction Controllable angle of
of servomotor
ABH
Radius-specified
helical interpolation
<180
Radius R
0° <
ABH
Positioning path
Start
point
Clockwise (CW)
less than CW 180°
Positioning pass
arc
< 180°
Radius R
Radius-specified
Counter
helical interpolation
clockwise (CCW)
Start
point
less than CCW 180°
End point
Central point
Central point
<180
End point
Positioning path
Positioning path
ABH
Radius-specified
helical interpolation
180 <
= 360
= <
Clockwise (CW)
CW 180° or more
180°
ABH
Radius-specified
Counter
helical interpolation
clockwise (CCW)
CCW 180° or more
360°
Radius R
Start point
Start point
Radius R
180 <
= <
= 360
Central point
End point
End point
Central point
Positioning path
6 - 58
6 POSITIONING CONTROL
(1) The setting range of end point address for the both of circular interpolation axis
31
31
and linear interpolation axis is (-2 ) to (2 -1).
31
(2) The maximum arc radius on the circular interpolation plane is (2 -1).
For example, the maximum arc radius for electronic gear 1:1 of unit [mm] is
214748364.7[µm].
231-1
Maximum arc
Arc central point
0
-231
231-1
Radius R
(3) Set the command speed with the vector speed for 2 axes circular interpolation
axis.
(4) The command speed unit is specified in the parameter block.
(5) Set the number of pitches within the range of 0 to 999. If it is set outside the
setting range, the servo program error [28] occurs, and cannot be started.
(6) All of the circular interpolation axis, linear axis and point address, command
speed, radius (2 word data above) and number of pitches (1 word data) are set
indirectly by the word devices.
[Program]
(1) Servo program
Servo program No.52 for absolute radius-specified helical interpolation control is
shown below.
<K 52>
ABH
1,
Axis
2,
Axis
3,
Linear axis
Speed
Number of pitches
Radius
Absolute radius specified-circular helical interpolation
100000
50000
25000
1000
100
60000
Axis for the circular . . . . . . . . Axis 1, Axis 2
interpolation
End point address of the . . . Axis 1 . . . 100000
circular interpolation axis
Axis 2 . . . . 50000
Linear axis for the circular. . . . . . . . . . . . . Axis 3
interpolation and linear interpolation
End point address of the linear axis . . . . . 25000
Positioning speed . . . 1000
Number of pitches . . . 100
Radius on a circular interpolation plane . . . . . 60000
(Note): Example of the Motion SFC program for positioning control is shown next page.
6 - 59
6 POSITIONING CONTROL
(2) Motion SFC program
Motion SFC program for which executes the servo program is shown below.
Absolute radius-specified helical interpolation control
Absolute radius-specified
helical interpolation control
[F10] SET M2042
Turn on all axes servo ON command.
[G10] PX000*M2415*M2435*M2455
Wait until PX000, Axis 1 servo ready, Axis 2 servo ready,
and Axis 3 servo ready turn on.
[K52] ABS
Axis
1, 100000PLS
Axis
2,
50000PLS
Linear axis 3,
25000PLS
1000PLS/s
Speed
Number of pitches 100
60000PLS
Radius
Absolute radius specified-circular helical interpolation
Axis for the circular . . . . . . . . Axis 1, Axis 2
interpolation
End point address of the . . . Axis 1 . . . 100000[PLS]
circular interpolation axis
Axis 2 . . . . 50000[PLS]
Linear axis for the circular . . . . . . . . . . . . Axis 3
interpolation and linear interpolation
End point address of the linear axis . . . . . 25000[PLS]
Positioning speed . . . 1000[PLS/s]
Number of pitches . . . 100
Radius on a circular interpolation plane . . . . . 60000[PLS]
[G20] !PX000
Wait until PX000 turn off after circular interpolation
completion.
END
(Note): Example of the above Motion SFC program is started using the automatic start or PLC program.
6 - 60
6 POSITIONING CONTROL
INH , INH
control
, INH
, INH
Incremental radius-specified helical interpolation
[Control details]
The linear interpolation to other linear axis is executed performing circular interpolation
from current stop position (start point) to specified circular relative end address (X1,
Y1) or linear axis end point relative address (Z1), and the incremental helical
interpolation control is executed so that it may become a spiral course.
It goes around on the specified circle for the specified number of pitches, the circular
interpolation which had remainder specified is executed, and positioning to end
address is executed. The radius-specified circle specifies circular interpolation method
connected start point and end point at the seeing on the plane for which performs
circular interpolation.
Operation details for incremental radius-specified helical interpolation are shown
below.
Circular interpolation plane
End point relative address (X1, Y1, Z1)
End point relative address (X1, Y1)
Linear interpolation
travel value = Z1
Helical interpolation
path
Number of pitches a
Circular interpolation
plane
Radius R
Start point
Start point
(Note)
Positioning speed V1
Center
angle
: Indicates setting range
6 - 61
(Note)
: Indicates setting range
6 POSITIONING CONTROL
Control details for the servo instructions are shown below.
Instruction
Rotation direction Controllable angle of
of servomotor
INH
Radius-specified
helical interpolation
<180
Radius R
0° <
INH
Positioning path
Start
point
Clockwise (CW)
less than CW 180°
Positioning pass
arc
Counter
helical interpolation
clockwise (CCW)
Central point
< 180°
Radius R
Radius-specified
End point
Start
point
less than CCW 180°
Central point
<180
End point
Positioning path
Positioning path
INH
Radius-specified
helical interpolation
180 <
= 360
= <
Clockwise (CW)
CW 180° or more
180°
Counter
helical interpolation
clockwise (CCW)
Radius R
Start point
End point
Start point
Radius R
End point
360°
INH
Radius-specified
Central point
180 <
= <
= 360
CCW 180° or more
Central point
Positioning path
(1) The setting range of end point relative address for the both of circular interpolation
31
axis and linear interpolation axis is 0 to (2 -1).
The travel direction is set by the sign (+/ -) of the travel value, as follows:
• Positive travel value .............Positioning control to forward direction
(Address increase direction)
• Negative travel value............Positioning control to reverse direction
(Address decrease direction)
31
(2) The maximum arc radius on the circular interpolation plane is 2 -1.
For example, the maximum arc radius for electronic gear 1:1 of unit [mm] is
214748364.7[µm].
231-1
Maximum arc
Arc central point
0
-231
231-1
Radius R
6 - 62
6 POSITIONING CONTROL
(3) Set the command speed with the vector speed for 2 axes circular interpolation
axis.
(4) The command speed unit is specified in the parameter block.
(5) Set the number of pitches within the range of 0 to 999. If it is set outside the
setting range, the servo program error [28] occurs and operation does not start.
(6) All of the circular interpolation axis, linear axis end point relative address,
command speed, radius (2 word data above) and number of pitches (1 word data)
are set indirectly by the word devices.
[Program]
(1) Servo program
Servo program No.53 for incremental radius-specified helical interpolation control
is shown below.
<K 53>
INH
1,
Axis
2,
Axis
3,
Linear axis
Speed
Number of pitches
Radius
100000
50000
25000
1000
100
60000
Incremental radius specified-circular helical interpolation
Axis for the circular . . . . . . . . Axis 1, Axis 2
interpolation
End point relative address of . . . Axis 1 . . . 100000
the circular interpolation axis
Axis 2 . . . . 50000
Linear axis for the circular . . . . . . . . . . . . . . . . . Axis 3
interpolation and linear interpolation
End point relative address of the linear axis . . . 25000
Positioning speed . . . 1000
Number of pitches . . . . . . 100
Radius on a circular interpolation plane . . . . . . . . . 60000
(Note): Example of the Motion SFC program for positioning control is shown next page.
6 - 63
6 POSITIONING CONTROL
(2) Motion SFC program
Motion SFC program for which executes the servo program is shown below.
Incremental radius-specified helical interpolation control
Incremental radius-specified
helical interpolation control
[F10] SET M2042
Turn on all axes servo ON command.
[G10] PX000*M2415*M2435*M2455
Wait until PX000, Axis 1 servo ready, Axis 2 servo ready and
Axis 3 servo ready turn on.
[K53] INH
Axis
1, 100000PLS
Axis
2,
50000PLS
25000PLS
Linear axis 3,
1000PLS/s
Speed
Number of pitches 100
60000PLS
Radius
[G20] !PX000
Incremental radius specified-circular helical interpolation
Axis for the circular . . . . . . . . Axis 1, Axis 2
interpolation
End point relative address of . . . Axis 1 . . . 100000[PLS]
the circular interpolation axis
Axis 2 . . . . 50000[PLS]
Linear axis for the circular . . . . . . . . . . . . . Axis 3
interpolation and linear interpolation
End point relative address of the linear axis . . . 25000[PLS]
Positioning speed . . . 1000[PLS/s]
Number of pitches . . . . 100
Radius on a circular interpolation plane . . . . . . . . . 60000[PLS]
Wait until PX000 turn OFF after circular interpolation
completion.
END
(Note): Example of the above Motion SFC program is started using the automatic start or PLC program.
6 - 64
6 POSITIONING CONTROL
ABH
, ABH
Absolute central point-specified helical interpolation control
[Control details]
The linear interpolation to other linear axis is executed performing 2 axes circular
interpolation from current stop position (X0, Y0, Z0) to specified circular end address
(X1, Y1) or linear axis end point address (Z1), and the absolute helical interpolation is
executed so that it may become a spiral course.
It goes around on the specified circle for the specified number of pitches, the circular
interpolation which had remainder specified is executed, and positioning to end
address is executed. The central point-specified circle specifies circular interpolation
method connected start point and end point at the seeing on the plane for which
performs circular interpolation.
Operation details for absolute central point-specified helical interpolation are shown
below.
Circular interpolation plane
End point address (X1, Y1 , Z1)
End point address (X1, Y1)
Linear interpolation
travel value = Z1-Z0
Helical interpolation
path
Number of pitches a
Circular interpolation
plane
Positioning speed V1
Radius R
Arc central point
Start point (X0,Y0) address (X2, Y2)
Start point (X0, Y0, Z0)
(Note)
: Indicates setting range
: Indicates setting range
(Note)
Control details for the servo instructions are shown below.
Instruction
Rotation direction Controllable angle of
of servomotor
Positioning pass
arc
ABH
Central pointspecified helical
Positioning path
Start point
Clockwise (CW)
0< <
= 360
End point
Central point
interpolation CW
0° <
360°
ABH
Central point
Central point-
Counter
specified helical
clockwise (CCW)
Start point
0< <
= 360
End point
Positioning path
interpolation CCW
(1) The setting range of end point address for the both of circular interpolation axis
31
31
and linear interpolation axis is (-2 ) to (2 -1).
31
31
(2) The setting range of central point address is (-2 ) to (2 -1).
6 - 65
6 POSITIONING CONTROL
31
(3) The maximum arc radius on the circular interpolation plane is 2 -1.
For example, the maximum arc radius for electronic gear 1:1 of unit [mm] is
214748364.7[µm].
231-1
Maximum arc
Arc central point
0
-231
231-1
Radius R
(4) Set the command speed with the vector speed for 2 axes circular interpolation
axis.
(5) The command speed unit is specified in the parameter block.
(6) Set the number of pitches within the range of 0 to 999. If it is set outside the
setting range, the servo program error [28] occurs and operation does not start.
(7) All of the circular interpolation axis, linear axis end point address, command
speed, radius (2 word data above) and number of pitches (1 word data) are set
indirectly by the word devices.
(8) If start point = end point, number of pitches = 1 and travel value of linear axis = 0,
at the only central point-specified circular interpolation, full circle can be drawn.
[Program]
(1) Servo program
Servo program No.55 for absolute central point-specified helical interpolation
control is shown below.
<K 55>
ABH
1,
Axis
2,
Axis
3,
Linear axis
Speed
Number of pitches
Central point 1,
Central point 2,
88541
30000
20000
1000
500
45000
20000
Absolute central point specified-circular helical interpolation
Axis for the circular . . . . . . . . Axis 1, Axis 2
interpolation
Axis 1 . . . . 88541
End point address of the . . .
Axis 2 . . . . 30000
circular interpolation axis
Linear axis for the circular . . . . . . . . . . . . Axis 3
interpolation and linear interpolation
End point address of the linear axis . . . . . 20000
Positioning speed . . . . 1000
Number of pitches . . . . . . . 500
Axis 1 . . . . 45000
Central point address . . . . . . .
Axis 2 . . . . 20000
of the arc
(Note): Example of the Motion SFC program for positioning control is shown next page.
6 - 66
6 POSITIONING CONTROL
(2) Motion SFC program
Motion SFC program for which executes the servo program is shown below.
Absolute central point-specified helical interpolation control
Absolute central point-specified
helical interpolation control
[F10] SET M2042
Turn on all axes servo ON command.
[G10] PX000*M2415*M2435*M2455
Wait until PX000, Axis 1 servo ready, Axis 2 servo ready
and Axis 3 servo ready turn on.
[K55] ABH
Axis
1,
88541PLS
Axis
2,
30000PLS
Linear axis 3,
20000PLS
Speed
1000PLS/s
Number of pitches 500
Ctr.P.
1,
45000PLS
Ctr.P.
2,
20000PLS
[G20] !PX000
Absolute central point-specified circular helical interpolation
Axis for the circular . . . . . . . Axis 1, Axis 2
interpolation
End point address of the . . . Axis 1 . . . 88541[PLS]
circular interpolation axis
Axis 2 . . . . 30000[PLS]
Linear axis for the circular . . . . . . . . . . . . Axis 3
interpolation and linear interpolation
End point address of the linear axis . . . . . 20000[PLS]
Positioning speed . . . 1000[PLS/s]
Number of pitches . . . 500
Axis 1 . . . . 45000[PLS]
Central point address . . . . . . . .
Axis 2 . . . . 20000[PLS]
of the arc
Wait until PX000 turn off after circular interpolation
completion.
END
(Note): Example of the above Motion SFC program is started using the automatic start or PLC program.
6 - 67
6 POSITIONING CONTROL
INH
, INH
Incremental central point-specified helical interpolation control
[Control details]
The linear interpolation to other linear axis is executed performing circular interpolation
from current stop position (start point) to specified circular relative end address (X1,
Y1) or linear axis end point relative address (Z1), and the incremental helical
interpolation control is executed so that it may become a spiral course.
It goes around on the specified circle for the specified number of pitches, the circular
interpolation which had remainder specified is executed, and positioning to end
address is executed. The central point-specified circle specifies circular interpolation
method connected start point and end point at the seeing on the plane for which
performs circular interpolation.
Operation details for incremental central point -specified helical interpolation are shown
below.
Circular interpolation plane
End point relative address (X1, Y1, Z1)
End point relative address (X1, Y1)
Linear interpolation
travel value = Z1
Helical interpolation
path
Number of pitches a
Circular interpolation
plane
Positioning speed V1
Radius R
Start point
Start point
(Note)
: Indicates setting range
(Note)
Arc central point
relative address (X2, Y2)
: Indicates setting range
Control details for the servo instructions are shown below.
Instruction
Rotation direction Controllable angle of
of servomotor
Positioning pass
arc
INH
Central point-specified
helical interpolation
Positioning path
End point
Central point
CW
0° <
INH
Central point-specified Counter
helical interpolation
Start point
Clockwise (CW)
0< <
= 360
clockwise (CCW)
360°
Central point
Start point
0< <
= 360
End point
Positioning path
CCW
(1) The setting range of end point relative address for the both of circular interpolation
31
axis and linear interpolation axis is 0 to (2 -1).
31
(2) The setting range of central point relative is 0 to (2 -1).
6 - 68
6 POSITIONING CONTROL
31
(3) The maximum arc radius on the circular interpolation plane is (2 -1).
For example, the maximum arc radius for electronic gear 1:1 of unit [mm] is
214748364.7[µm].
231-1
Maximum arc
Arc central point
0
-231
231-1
Radius R
(4) Set the command speed with the vector speed for 2 axes circular interpolation
axis.
(5) The command speed unit is specified in the parameter block.
(6) Set the number of pitches within the range of 0 to 999. If it is set outside the
setting range, the servo program error [28] occurs and operation does not start.
(7) All of the circular interpolation axis, linear axis end relative address, command
speed, radius (2 word data above) and number of pitches (1 word data) are set
indirectly by the word devices.
(8) If start point = end point, number of pitches = 1 and travel value of linear axis = 0,
at the only central point-specified circular interpolation, full circle can be drawn.
[Program]
(1) Servo program
Servo program No.56 for incremental central point-specified helical interpolation
control is shown below.
<K 56>
INH
1,
Axis
2,
Axis
3,
Linear axis
Speed
Number of pitches
Central point 1,
Central point 2,
Incremental central point specified-circular helical interpolation
88541
30000
20000
1000
500
45000
20000
Axis for the circular . . . . . . . . . Axis 1, Axis 2
interpolation
Axis 1 . . . . 88541
End point relative address of
the circular interpolation axis Axis 2 . . . . 30000
Linear axis for the circular. . . . . . . . . . . . . . Axis 3
interpolation and linear interpolation
End point relative address from . . . . . . . . . 20000
the linear axis specification
Positioning speed . . . . 1000
Number of pitches . . . 500
Axis 1 . . . . 45000
Central point relative address . .
Axis 2 . . . . 20000
of the arc
(Note): Example of the Motion SFC program for positioning control is shown next page.
6 - 69
6 POSITIONING CONTROL
(2) Motion SFC program
Motion SFC program for which executes the servo program is shown below.
Incremental central point-specified
helical interpolation control
[F10] SET M2042
Turn on all axes servo ON command.
[G10] PX000*M2415*M2435*M2455
Wait until PX000, Axis 1 servo ready, Axis 2 servo ready and
Axis 3 servo ready turn on.
[K56] INH
Axis
1,
88541PLS
Axis
2,
30000PLS
20000PLS
Linear axis 3,
1000PLS/s
Speed
Number of pitches 500
45000PLS
Ctr.P.
1,
20000PLS
Ctr.P.
2,
[G20] !PX000
Incremental central point-specified helical interpolation control
Axis for the circular . . . . . . . . Axis 1, Axis 2
interpolation
End point relative address of . . . . . Axis 1 . . . 88541[PLS]
the circular interpolation axis
Axis 2 . . . 30000[PLS]
Linear axis for the circular . . . . . . . . . . . . . Axis 3
interpolation and linear interpolation
End point relative address of the linear axis . . .20000[PLS]
Positioning speed . . . 1000[PLS/s]
Number of pitches. . . . 500
Axis 1 . . . . 45000[PLS]
Central point relative address . . . . . .
Axis 2 . . . . 20000[PLS]
of the arc
Wait until PX000 turn off after circular interpolation completion.
END
(Note): Example of the above Motion SFC program is started using the automatic start or PLC program.
6 - 70
6 POSITIONING CONTROL
ABH
Absolute auxiliary point-specified helical interpolation control
[Control details]
The linear interpolation to other linear axis is executed performing 2 axes circular
interpolation from current stop position (X0, Y0, Z0) to specified circular end address
(X1, Y1) or linear axis end point address (Z1), and the absolute helical interpolation is
executed so that it may become a spiral course.
It goes around on the specified circle for the specified number of pitches, the circular
interpolation which had remainder specified is executed, and positioning to end
address is executed. The auxiliary point-specified circle specifies circular interpolation
method connected start point and end point at the seeing on the plane for which
performs circular interpolation.
Operation details for absolute auxiliary point-specified helical interpolation are shown
below.
Circular interpolation plane
End point address (X1, Y1, Z1)
End point address (X1, Y1)
Linear interpolation
travel value = Z1-Z0
Helical interpolation
path
Number of pitches a
Circular interpolation
plane
Radius R
Arc auxiliary point
address (X2, Y2)
Start point
Start point (X0, Y0, Z0)
(Note)
Positioning speed V1
: Indicates setting range
(Note)
: Indicates setting range
Control details for the servo instructions are shown below.
Instruction
ABH
Auxiliary pointspecified helical
interpolation
Rotation direction
of servomotor
Controllable angle of arc
Clockwise (CW)/
360°
0° <
Counter
clockwise (CCW)
(1) The setting range of end point address for the both of circular interpolation axis
31
31
and linear interpolation axis is (-2 ) to (2 -1).
31
31
(2) The setting range of auxiliary point address is (-2 ) to (2 -1).
31
(3) The maximum arc radius on the circular interpolation plane is 2 -1.
For example, the maximum arc radius for electronic gear 1:1 of unit [mm] is
214748364.7[µm].
6 - 71
6 POSITIONING CONTROL
231-1
Maximum arc
Arc central point
0
-231
231-1
Radius R
(4) Set the command speed with the vector speed for 2 axes circular interpolation
axis.
(5) The command speed unit is specified in the parameter block.
(6) Set the number of pitches within the range of 0 to 999. If it is set outside the
setting range, the servo program error [28] occurs and operation does not start.
(7) All of the circular interpolation axis, linear axis end relative address, command
speed, radius (2 word data above) and number of pitches (1 word data) are set
indirectly by the word devices.
[Program]
(1) Servo program
Servo program No.60 for absolute auxiliary point-specified helical interpolation
control is shown below.
<K 60>
ABH
1,
Axis
2,
Axis
3,
Linear axis
Speed
Number of pitches
Auxiliary point 1,
Auxiliary point 2,
Absolute auxiliary point-specified circular helical interpolation
88541
30000
20000
1000
500
45000
20000
Axis for the circular . . . . . . . Axis 1, Axis 2
interpolation
Axis 1 . . . . 88541
End point address of the . . .
Axis 2 . . . . 30000
circular interpolation axis
Linear axis for the circular . . . . . . . . . . . . . Axis 3
interpolation and linear interpolation
End point address of the linear axis . . . . . 20000
Positioning speed . . . . 1000
Number of pitches . . . . 500
Axis 1 . . . . 45000
Auxiliary point address . . . . . . .
Axis 2 . . . . 20000
of the arc
(Note): Example of the Motion SFC program for positioning control is shown next page.
6 - 72
6 POSITIONING CONTROL
(2) Motion SFC program
Motion SFC program for which executes the servo program is shown below.
Absolute auxiliary point-specified helical interpolation control
Absolute auxiliary point-specified
helical interpolation control
[F10] SET M2042
Turn on all axes servo ON command.
[G10] PX000*M2415*M2435*M2455
Wait until PX000, Axis 1 servo ready, Axis 2 servo ready
and Axis 3 servo ready turn on.
[K60]
ABH
Axis
1,
88541PLS
Axis
2,
30000PLS
Str.Ax. 3,
20000PLS
Speed
1000PLS/s
Number of pitches 500
Aux.P. 1,
45000PLS
Aux.P. 2,
20000PLS
[G20] !PX000
Absolute auxiliary point-specified circular helical interpolation
Axis for the circular . . . . . . . . Axis 1, Axis 2
interpolation
End point address of the . . . Axis 1 . . . 88541[PLS]
circular interpolation axis
Axis 2 . . . . 30000[PLS]
Linear axis for the circular . . . . . . . . . . . . . Axis 3
interpolation and linear interpolation
End point address of the linear axis . . . . . 20000[PLS]
Positioning speed . . . 1000[PLS/s]
Number of pitches . . . 500
Axis 1 . . . . 45000[PLS]
Auxiliary point address . . . . . . .
Axis 2 . . . . 20000[PLS]
of the arc
Wait until PX000 turn off after circular interpolation
completion.
END
(Note): Example of the above Motion SFC program is started using the automatic start or PLC program.
6 - 73
6 POSITIONING CONTROL
INH
Incremental auxiliary point-specified helical interpolation control
[Control details]
The linear interpolation to other linear axis is executed performing circular interpolation
from current stop position (start point) to specified circular relative end address (X1,
Y1) or linear axis end point relative address (Z1), and the incremental helical
interpolation control is executed so that it may become a spiral course.
It goes around on the specified circle for the specified number of pitches, the circular
interpolation which had remainder specified is executed, and positioning to end
address is executed. The auxiliary point-specified circle specifies circular interpolation
method connected start point and end point at the seeing on the plane for which
performs circular interpolation.
Operation details for incremental auxiliary point-specified helical interpolation are
shown below.
Circular interpolation plane
End point relative address (X1, Y1, Z1)
End point relative address (X1, Y1)
Linear interpolation
travel value = Z1
Helical interpolation
path
Number of pitches a
Circular interpolation
plane
Radius R
Arc auxiliary point
address (X2, Y2)
Start point
Start point
(Note)
Positioning speed V1
: Indicates setting range
: Indicates setting range
(Note)
Control details for the servo instructions are shown below.
Instruction
INH
Auxiliary pointspecified helical
interpolation
Rotation direction
of servomotor
Controllable angle of arc
Clockwise (CW)/
0° <
Counter
360°
clockwise (CCW)
(1) The setting range of end point relative address for the both of circular interpolation
31
axis and linear interpolation axis is 0 to (2 -1).
31
(2) The setting range of auxiliary point relative is 0 to (2 -1).
31
(3) The maximum arc radius on the circular interpolation plane is (2 -1).
For example, the maximum arc radius for electronic gear 1:1 of unit [mm] is
214748364.7[µm].
6 - 74
6 POSITIONING CONTROL
231-1
Maximum arc
Arc central point
0
-231
231-1
Radius R
(4) Set the command speed with the vector speed for 2 axes circular interpolation
axis.
(5) The command speed unit is specified in the parameter block.
(6) Set the number of pitches within the range of 0 to 999. If it is set outside the
setting range, the servo program error [28] occurs and operation does not start.
(7) All of the circular interpolation axis, linear axis end point address, command
speed, radius (2 word data above), and number of pitches (1 word data) are set
indirectly by the word devices.
[Program]
(1) Servo program
Servo program No.61 for incremental auxiliary point-specified helical interpolation
control is shown below.
<K 61>
INH
1,
Axis
2,
Axis
3,
Linear axis
Speed
Number of pitches
Auxiliary point 1,
Auxiliary point 2,
Incremental auxiliary point-specified circular helical interpolation
88541
30000
20000
1000
500
45000
20000
Axis for the circular . . . . . . . . Axis 1, Axis 2
interpolation
Axis 1 . . . . 88541
End point relative address of
the circular interpolation axis Axis 2 . . . . 30000
Linear axis for the circular . . . . . . . . . . . . . Axis 3
interpolation and linear interpolation
End point relative address from . . . . . . . . . 20000
the linear axis specification
Positioning speed . . . . 1000
Number of pitches . . . . 500
Axis 1 . . . . 45000
Auxiliary point relative . . . . . . . .
Axis 2 . . . . 20000
address of the arc
(Note): Example of the Motion SFC program for positioning control is shown next page.
6 - 75
6 POSITIONING CONTROL
(2) Motion SFC program
Motion SFC program for which executes the servo program is shown below.
Incremental auxiliary point-specified helical interpolation control
Incremental auxiliary point-specified
helical interpolation control
[F10] SET M2042
Turn on all axes servo ON command.
[G10] PX000*M2415*M2435*M2455
Wait until PX000, Axis 1 servo ready, Axis 2 servo ready and
Axis 3 servo ready turn on.
[K61] INH
Axis
1,
88541PLS
Axis
2,
30000PLS
20000PLS
Linear axis 3,
Speed
1000PLS/s
Number of pitches 500
Aux.P.
1,
45000PLS
Aux.P.
2,
20000PLS
[G20] !PX000
Incremental auxiliary point-specified circular helical interpolation
Axis for the circular . . . . . . . . . . . . Axis 1, Axis 2
interpolation
End point relative address of . . . . Axis 1 . . . 88541[PLS]
the circular interpolation axis
Axis 2 . . . . 30000[PLS]
Linear axis for the circular . . . . . . . . . . . . Axis 3
interpolation and linear interpolation
End point relative address of the linear axis . . . 20000[PLS]
Positioning speed . . . 1000[PLS/s]
Number of pitches . . . 500
Axis 1 . . . . 45000[PLS]
Auxiliary point relative address . . . . .
Axis 2 . . . . 20000[PLS]
of the arc
Wait until PX000 turn off after circular interpolation completion.
END
(Note): Example of the above Motion SFC program is started using the automatic start or PLC program.
6 - 76
6 POSITIONING CONTROL
6.10 1 Axis Fixed-Pitch Feed Control
Positioning control for specified axis of specified travel value from the current stop
point.
Fixed-pitch feed control uses the FEED-1servo instruction.
Others
WAIT-ON/OFF
Cancel
Speed change
S-curve ratio
Allowable error range for circular interpolation
Torque limit value
Deceleration processing on stop input
Rapid stop deceleration time
Deceleration time
Speed limit value
Acceleration time
Control units
Parameter block
Central point
Auxiliary point
Torque limit value
M-code
1
Command speed
Incremental
Dwell time
FEED-1
Address/travel value
Number of
control axes
Axis
Positioning
method
Parameter block No.
Servo
instruction
Arc
Radius
Items set using MT Developer
Common
Valid
: Must be set
: Set if required
[Control details]
(1) Positioning control for the specified travel value from the current stop position "0"
is executed.
(2) The travel direction is set by the sign (+/ -) of the travel value, as follows:
• Positive travel value .............Positioning control to forward direction
(Address increase direction)
• Negative travel value............Positioning control to reverse direction
(Address decrease direction)
Positioning direction
Operation timing
V
Current stop position
Fixed-pitch feed by FEED-1 instruction
Command speed
Reverse
direction
Forward
direction
Travel direction
for negative sign
t
Travel direction
for positive sign
Travel value
Servo program start
(Note)
: Indicates setting data
Fig.6.23 1 axis fixed-pitch feed control
POINT
Do not set the travel value to "0" for fixed-pitch feed control.
If the travel value is set to "0", fixed-pitch feed completion without fixed-pitch feed.
6 - 77
6 POSITIONING CONTROL
[Program]
Program for repetition 1 axis fixed-pitch feed control is shown as the following
conditions.
(1) System configuration
Fixed-pitch feed control of Axis 4.
Motion CPU control module
Q61P Q03UD Q172D QX41
CPU
CPU
QY41 Q172D
LX
Positioning start command (PX000)
Positioning end command (PX001)
AMP
Axis
1 M
AMP
Axis
2 M
AMP
Axis
3 M
AMP
Axis
4 M
(2) Fixed-pitch feed control conditions
(a) Positioning conditions are shown below.
Item
Setting
Servo program No.
No.300
Control axis
Axis 4
Control speed
10000
Travel value
80000
(b) Fixed-pitch feed control start command ....... PX000 Leading edge
(OFF ON)
(c) Fixed-pitch feed control end command ....…. PX001 Leading edg
(OFF ON)
6 - 78
6 POSITIONING CONTROL
(3) Operation timing
Operation timing for fixed-pitch feed control is shown below.
Servo program No.300
V
10000
Dwell 1second
Dwell 1second
Dwell 1second
t
PLC ready flag (M2000)
All axes servo ON command
(M2042)
All axes servo ON accept flag
(M2049)
Axis 4 servo ready (M2475)
Start command (PX000)
Servo program start
Axis 4 start accept flag
(M2004)
End command (PX001)
(4) Servo program
Servo program No.300 for fixed-pitch feed control is shown below.
<K 300>
FEED-1
Axis
Speed
Dwell
4,
80000
10000
1000
1 axis fixed-pitch feed
Axis used . . . . . . . . . . Axis 4
Travel value . . . . . . . . 80000
Command speed . . . 10000
Dwell . . . . . . . . . . . . . . 1000
(Note): Example of the Motion SFC program for positioning control is shown next page.
6 - 79
6 POSITIONING CONTROL
(5) Motion SFC program
Motion SFC program for which executes the servo program is shown below.
1 axis fixed-pitch feed control
1 axis fixed-pitch feed control
[F10]
SET M2042
[G10]
PX000*M2475
Turn on all axes servo ON command.
Wait until PX000 and Axis 4 servo ready turn on.
P0
[K300]
[G20]
[G30]
FEED-1
Axis
Speed
Dwell
4,
80000PLS
10000PLS/s
1000ms
PX001
1 axis fixed-pitch feed
Axis used . . . . . . . . . . Axis 4
Travel value . . . . . . . . 80000[PLS]
Command speed . . . . . . 10000[PLS/s]
Dwell . . . . . . . . . . . . . . . . . 1000[ms]
P0
After fixed-pitch feed completion,
PX001 is ON : Fixed-pitch feed starts.
PX001 is OFF : Motion SFC program ends.
Wait until PX000 and PX001 turn off after
fixed-pitch feed completion.
!PX000*!PX001
END
(Note): Example of the above Motion SFC program is started using the automatic start or PLC program.
6 - 80
6 POSITIONING CONTROL
6.11 Fixed-Pitch Feed Control Using 2 Axes Linear Interpolation
Fixed-pitch feed control using 2 axes linear interpolation from the current stop position
with the specified 2 axes.
Fixed-pitch feed control using 2 axes linear interpolation uses the FEED-2 servo
instruction.
WAIT-ON/OFF
Cancel
Speed change
S-curve ratio
Allowable error range for circular interpolation
Torque limit value
Others
Deceleration processing on stop input
Rapid stop deceleration time
Deceleration time
Speed limit value
Acceleration time
Control unit
Parameter block
Central point
Auxiliary point
Torque Limit Value
M-Code
2
Command speed
Incremental
Dwell Time
FEED-2
Address/travel value
Number of
control axes
Axis
Positioning
method
Parameter block No.
Servo
instruction
Arc
Radius
Items set using MT Developer
Common
Valid
: Must be set
: Set if required
[Control details]
(1) Positioning control from the current stop position "0" to the position which
combined travel direction and travel value specified with each axis is executed.
(2) The travel direction for each axis is set by the sign (+/ -) of the travel value for
each axis, as follows:
• Positive travel value .............Positioning control to forward direction
(Address increase direction)
• Negative travel value............Positioning control to reverse direction
(Address decrease direction)
Operation timing
Positioning direction
V
Forward direction
Fixed-pitch feed by FEED-2 instruction
Command speed
Y-axis
travel value
Reverse
direction
t
0
X-axis travel value
Current stop position
Forward
direction
Servo program start
Reverse direction
(Note)
: Indicates setting data
Fig.6.24 Fixed-pitch feed control using 2 axes linear interpolation
6 - 81
6 POSITIONING CONTROL
POINT
Do not set the travel value to "0" for fixed-pitch feed control.
The following results if the travel value is set to "0":
(1) If the travel value of both is set to "0", fixed-pitch feed completion without fixedpitch feed.
[Program]
Program for fixed-pitch feed control using 2 axes linear interpolation is shown as the
following conditions.
(1) System configuration
Fixed-pitch feed control using 2 axes linear interpolation of Axis 2 and Axis 3.
Motion CPU control module
Q61P Q03UD Q172D QX41
CPU
CPU
QY41 Q172D
LX
Positioning start command (PX000)
AMP
Axis
1 M
AMP
AMP
Axis
3 M
Axis
2 M
AMP
Axis
4 M
(2) Fixed-pitch feed control
(a) Fixed-pitch feed control conditions are shown below.
Item
Setting
Servo program No.
No.310
Positioning speed
10000
Control axis
Axis 2
Axis 3
Travel value
500000
300000
(b) Fixed-pitch feed control start command ....... PX000 Leading edge
(OFF ON)
6 - 82
6 POSITIONING CONTROL
(3) Operation timing
Operation timing for fixed-pitch feed control using 2 axes linear interpolation is
shown below.
V
Servo program No.310
10000
t
PLC ready flag (M2000)
All axes servo ON command
(M2042)
All axes servo ON accept flag
(M2049)
Axis 2 servo ready (M2435)
Axis 3 servo ready (M2455)
Start command (PX000)
Servo program start
Axis 2 start accept flag
(M2002)
Axis 3 start accept flag
(M2003)
(4) Servo program
Servo program No.310 for fixed-pitch feed control using 2 axes linear
interpolation is shown below.
<K 310>
FEED-2
Axis
Axis
Speed
Fixed-pitch feed using 2 axes linear interpolation
2,
3,
500000
300000
10000
Axis used . . . . . . . . Axis 2, Axis 3
Travel value . . . . . Axis 2 . . . 500000
Axis 3 . . . 300000
Positioning speed . . . . . . . . . . . . . 10000
(Note): Example of the Motion SFC program for positioning control is shown next page.
6 - 83
6 POSITIONING CONTROL
(5) Motion SFC program
Motion SFC program for which executes the speed-switching control is shown
below.
Fixed-pitch feed using 2 axes linear interpolation
Fixed-pitch feed using
2 axes linear interpolation
[F10]
[G10]
SET M2042
Turn on all axes servo ON command.
PX000*M2435*M2455
Wait until PX000, Axis 2 servo ready and Axis 3
servo ready turn on.
P0
[K310] FEED-2
Axis
2,
Axis
3,
Speed
[G20]
500000PLS
300000PLS
10000PLS/s
Fixed-pitch feed using 2 axes linear interpolation
Axis used . . . . . . . . . . Axis 2, Axis 3
Travel value . . . . . . Axis 2 . . . 500000[PLS]
Axis 3 . . . 300000[PLS]
Positioning speed . . . . . . . . . . . . . . . 10000[PLS/s]
P0
!PX000
After fixed-pitch feed completion,
PX000 is ON : Fixed-pitch feed start again.
PX000 is OFF : Motion SFC program end.
END
(Note): Example of the above Motion SFC program is started using the automatic start or PLC program.
6 - 84
6 POSITIONING CONTROL
6.12 Fixed-Pitch Feed Control Using 3 Axes Linear Interpolation
Fixed-pitch feed control using 3 axes linear interpolation from the current stop position
with the specified 3 axes.
Fixed-pitch feed control using 3 axes linear interpolation uses the FEED-3 servo
instruction.
Others
WAIT-ON/OFF
Cancel
Speed change
S-curve ratio
Allowable error range for circular interpolation
Torque limit value
Deceleration processing on stop input
Rapid stop deceleration time
Deceleration time
Speed limit value
Acceleration time
Control unit
Parameter block
Central point
Auxiliary point
Torque limit value
M-code
3
Command speed
Incremental
Dwell time
FEED-3
Axis
Number of
control axes
Address/travel value
Positioning
method
Parameter block No.
Servo
instruction
Arc
Radius
Items set using MT Developer
Common
Valid
: Must be set
: Set if required
[Control details]
(1) Positioning control from the current stop position "0" to the position which
combined travel direction and travel value specified with each axis is executed.
(2) The travel direction for each axis is set by the sign (+/ -) of the travel value for
each axis, as follows:
• Positive travel value .............Positioning control to forward direction
(Address increase direction)
• Negative travel value............Positioning control to reverse direction
(Address decrease direction)
Positioning direction
Operation timing
V
Forward direction
Fixed-pitch feed by FEED-3 instruction
Command speed
Forward direction
t
Y-axis
travel value
Z-axis
travel value
Reverse direction
Forwar
directio
Reverse direction
Servo program start
X-axis travel value
Reverse direction
(Note)
: Indicates setting data
Fig. 6.25 Fixed-pitch feed control using 3 axes linear interpolation
6 - 85
6 POSITIONING CONTROL
POINT
Do not set the travel value to "0" for fixed-pitch feed control.
The following results if the travel value is set to "0":
(1) If the travel value of all axes are set to "0", fixed-pitch feed completion without
fixed-pitch feed.
[Program]
Program for fixed-pitch feed control using 3 axes linear interpolation is shown as the
following conditions.
(1) System configuration
Fixed-pitch feed control using 3 axes linear interpolation of Axis 1, Axis 2 and
Axis 3.
Motion CPU control module
Q61P Q03UD Q172D QX41
CPU
CPU
QY41 Q172D
LX
Positioning start command (PX000)
AMP
Axis
1 M
AMP
Axis
2 M
AMP
Axis
3 M
AMP
Axis
4 M
(2) Fixed-pitch feed control
(a) Fixed-pitch feed control conditions are shown below.
Item
Setting
Servo program No.
No.320
Positioning speed
1000
Control axes
Axis 1
Axis 2
Axis 3
Travel value
50000
40000
30000
(b) Fixed-pitch feed control start command ....... PX000 Leading edge
(OFF ON)
6 - 86
6 POSITIONING CONTROL
(3) Operation timing
Operation timing for fixed-pitch feed control using 3 axes linear interpolation is
shown below.
V
Servo program No.320
1000
t
PLC ready flag (M2000)
All axes servo ON command
(M2042)
All axes servo ON accept flag
(M2049)
Axis 1 servo ready (M2415)
Axis 2 servo ready (M2435)
Axis 3 servo ready (M2455)
Start command (PX000)
Servo program start
Axis 1 start accept flag
(M2001)
Axis 2 start accept flag
(M2002)
Axis 3 start accept flag
(M2003)
(4) Servo program
Servo program No.320 for fixed-pitch feed control using 3 axes linear
interpolation is shown below.
<K 320>
FEED-3
Axis
Axis
Axis
Speed
Fixed-pitch feed using 3 axes linear interpolation
1,
2,
3,
50000
40000
30000
1000
Axis used . . . . . . . . . Axis 1, Axis 2, Axis 3
Axis 1 . . . 50000
Travel value . . . . . Axis 2 . . . 40000
Axis 3 . . . 30000
Positioning speed . . . . . . . . . . . . 1000
(Note): Example of the Motion SFC program for positioning control is shown next page.
6 - 87
6 POSITIONING CONTROL
(5) Motion SFC program
Motion SFC program for which executes the servo program is shown below.
Fixed-pitch feed using 3 axes linear interpolation
Fixed-pitch feed using
3 axes linear interpolation
[F10]
[G10]
SET M2042
Turn on all axes servo ON command.
PX000*M2415*M2435*M2455
Wait until PX000, Axis 1 servo ready, Axis 2 servo ready
and Axis 3 servo ready turn on.
P0
[K320]
[G20]
FEED-3
Axis
1,
Axis
2,
Axis
3,
Speed
50000PLS
40000PLS
30000PLS
1000PLS/s
Fixed-pitch feed using 3 axes linear interpolation
Axis used . . . . . . . . . Axis 1, Axis 2, Axis 3
Axis 1 . . . 500000[PLS]
Travel value . . . . . . Axis 2 . . . 400000[PLS]
Axis 3 . . . 300000[PLS]
Positioning speed . . . . . . . . . . . . . . . 10000[PLS/s]
P0
!PX000
After fixed-pitch feed completion,
PX000 is ON : Fixed-pitch feed start again.
PX000 is OFF : Motion SFC program end.
END
(Note): Example of the above Motion SFC program is started using the automatic start or PLC program.
6 - 88
6 POSITIONING CONTROL
6.13 Speed Control ( )
(1) Speed control for the specified axis is executed.
(2) Control includes positioning loops for control of servo amplifiers.
(3) Speed control ( ) uses the VF (Forward) and VR (Reverse) servo instructions.
VF
Others
WAIT-ON/OFF
Cancel
Speed change
S-curve ratio
Allowable error range for circular interpolation
Torque limit value
Rapid stop deceleration time
Deceleration time
Speed limit value
Acceleration time
Control unit
Central point
Auxiliary point
Torque limit value
M-code
Command speed
Dwell time
Address/travel value
Deceleration processing on stop input
Parameter block
Number of
control axes
Axis
Positioning
method
Parameter block No.
Servo
instruction
Arc
Radius
Items set using MT Developer
Common
1
VR
Valid
: Must be set
: Set if required
[Control details]
(1) Controls the axis at the specified speed until the input of the stop command after
starting of the servomotors.
• VF ......... Forward direction start
• VR ........ Reverse direction start
(2) Current value does not change at "0".
V
Setting
speed
Stop command accept
Speed
control
start
Operation speed
Stop
t
Fig.6.26 Speed control ( )
6 - 89
6 POSITIONING CONTROL
(3) Stop commands and stop processing
The stop commands and stop processing for speed control are shown in the
table.6.1.
Table.6.1 Stop commands and stop processing
Stop command
Stop condition
Stop axis
Deceleration stop based on the parameter
block or the "deceleration time on STOP
input" specified with the servo instruction.
STOP signal input of the
Q172DLX (STOP)
Stop command
(M3200+20n)
OFF
Specified
axis
ON
Speed change to speed "0"
Deceleration stop based on the parameter
block or the "deceleration time" specified with
the servo instruction.
Deceleration stop based on the parameter
block or the "rapid stop deceleration time"
specified with the servo instruction.
Rapid stop command (Note)
(M3201+20n)
Rapid stop of the all axes/
deceleration stop from
MT Developer. (Note)
(Test mode)
Stop processing
Click icon
All axes
Speed change
request
Specified
axis
Deceleration stop based on the parameter
block or the "rapid stop deceleration time"
specified with the servo instruction.
Deceleration stop based on the parameter
block or the "deceleration time" specified with
the servo instruction.
POINT
(Note): The rapid stop command and the rapid stop of the all axes from
MT Developer are also valid during deceleration by the "STOP signal input
of the Q172DLX" (STOP) or stop command (M3200+20n), and processing
based on the "rapid stop deceleration time" parameter starts at the time the
stop condition occurs.
Speed limit value
"STOP signal input of the Q172DLX" (STOP)
or stop command
Operation speed
Rapid stop command or rapid stop of
the all axes from the MT Developer
[Cautions]
(1) After executing of the speed control using the absolute position system, the feed
current value cannot be set to "0" by the following operations:
• Reset
• Turning the servo power supply on (OFF ON)
(2) The dwell time cannot be set.
6 - 90
6 POSITIONING CONTROL
[Program]
Program for speed control ( ) is shown as the following conditions.
(1) System configuration
Speed control ( ) of Axis 1.
Motion CPU control module
Q61P Q03UD Q172D QX41
CPU
CPU
QY41 Q172D
LX
Start/stop command (PX000)
AMP
Axis
1 M
AMP
AMP
Axis
2 M
Axis
3 M
AMP
Axis
4 M
(2) Speed control ( ) conditions
(a) Speed control ( ) conditions are shown below.
Item
Setting
Servo program No.
No.91
Control axis
Axis 1
Control speed
3000
Rotation direction
Forward
(b) Speed control ( ) start command........ PX000 Leading edge (OFF ON)
(c) Stop command......…………………… PX000 Trailing edge (ON OFF)
(3) Operation timing
Operation timing for speed control ( ) is shown below.
V
3000
Speed control by
servo program No.91
Stop command
accept
t
PLC ready flag (M2000)
All axes servo ON command
(M2042)
All axes servo ON accept flag
(M2049)
Axis 1 servo ready (M2415)
Start command (PX000)
Servo program start
Axis 1 start accept flag
(M2001)
Stop command (M3200)
6 - 91
6 POSITIONING CONTROL
(4) Servo program
Servo program No.91 for speed control ( ) is shown below.
<K 91>
VF
Axis
Speed
1
3000
Speed control ( ) (Forward rotation)
Axis used . . . . . . . . . Axis 1
Positioning speed . . . 3000
(5) Motion SFC program
Motion SFC program for which executes the servo program is shown below.
Speed control ( )
Speed control ( )
[F10]
SET M2042
Turn on all axes servo ON command.
[G10]
PX000*M2415
Wait until PX000 and Axis 1 servo ready turn on.
[K91]
VF
Axis
1
Speed
Speed control ( ) (Forward rotation)
Axis used . . . . . . . . . Axis 1
Positioning speed . . . 3000[PLS/s]
[G20]
[F20]
[G30]
[F30]
3000PLS/s
!PX000
Wait until PX000 turns off after speed control ( ) start.
SET M3200
Turn on Axis 1 stop command.
!M2001
Wait until Axis 1 start accept flag turn off.
RST M3200
Turn off Axis 1 stop command.
END
(Note): Example of the above Motion SFC program is started using the automatic start or PLC program.
6 - 92
6 POSITIONING CONTROL
6.14 Speed Control ( )
(1) Speed control for the specified axis is executed.
(2) Speed control not includes positioning loops for control of servo amplifiers.
It can be used for stopper control, etc. so that it may not become error excessive.
(3) Speed control ( ) uses the VVF (Forward) and VVR (Reverse) servo instructions.
VVF
VVR
Others
WAIT-ON/OFF
Cancel
Speed change
S-curve ratio
Allowable error range for circular interpolation
Torque limit value
Rapid stop deceleration time
Deceleration time
Speed limit value
Acceleration time
Control unit
Central point
Auxiliary point
Torque limit value
M-code
Command speed
Dwell time
Address/travel value
1
Deceleration processing on stop input
Parameter block
Number of
control axes
Axis
Positioning
method
Parameter block No.
Servo
instruction
Arc
Radius
Items set using MT Developer
Common
Valid
: Must be set
: Set if required
[Control details]
(1) Controls the axis at the specified speed until the input of the stop command after
starting of the servomotors.
• VVF ....... Forward direction start
• VVR....... Reverse direction start
(2) Current value or deviation counter do not change at "0".
(3) When the setting for "torque" is set in the servo program and an indirect setting
made, the torque limit value can be changed during operation by changing the
value of the indirect device.
(4) The stop command and stop processing are the same as for speed control (I).
[Cautions]
(1) After executing of the speed control using the absolute position system, the feed
current value cannot be set to "0" by the following operations:
• Reset
• Turning the servo power supply on (OFF ON)
(2) The dwell time cannot be set.
6 - 93
6 POSITIONING CONTROL
(3) Even if the speed command is set as probe data by the digital oscilloscope
function, the value on digital oscilloscope does not change with "0".
[Program]
Program for speed control ( ) is shown as the following conditions.
(1) System configuration
Speed control ( ) of Axis 3.
Motion CPU control module
Q61P Q03UD Q172D QX41
CPU
CPU
QY41 Q172D
LX
Start/stop command (PX000)
AMP
Axis
1 M
AMP
AMP
Axis
2 M
Axis
3 M
AMP
Axis
4 M
(2) Speed control ( ) conditions
(a) Speed control ( ) conditions are shown below.
Item
Setting
Servo program No.
No.55
Control axis
Axis 3
Control speed
4000
Rotation direction
Forward
(b) Speed control ( ) start command ....... PX000 Leading edge (OFF ON)
(c) Stop command .....…………………… PX000 Trailing edge (ON OFF)
(3) Operation timing
Operation timing for speed control ( ) is shown below.
V
4000
Speed control by
servo program No.55
Stop command
accept
t
PLC ready flag (M2000)
All axes servo ON command
(M2042)
All axes servo ON accept flag
(M2049)
Axis 3 servo ready (M2455)
Start command (PX000)
Servo program start
Axis 3 start accept flag
(M2003)
Stop command (M3240)
6 - 94
6 POSITIONING CONTROL
(4) Servo program
Servo program No.55 for speed control ( ) is shown below.
<K 55>
VVF
Axis
Speed
3
4000
Speed control ( ) (Forward rotation)
Axis used . . . . . . . . . Axis 3
Positioning speed . . . 4000
(5) Motion SFC program
Motion SFC program for which executes the servo program is shown below.
Speed control ( )
Speed control ( )
[F10]
[G10]
SET M2042
Turn on all axes servo ON command.
PX000*M2455
Wait until PX000 and Axis 3 servo ready turn on.
[K55] VVF
Axis
3
Speed
[G20]
[F20]
[G30]
[F30]
4000PLS/s
Speed control ( ) (Forward rotation)
Axis used . . . . . . . . . Axis 3
Positioning speed . . . 4000[PLS/s]
!PX000
Wait until PX000 turn off after speed control ( ) start.
SET M3240
Turn on Axis 3 stop command.
!M2003
Wait until Axis 3 start accept flag turn off.
RST M3240
Turn off Axis 3 stop command.
END
(Note): Example of the above Motion SFC program is started using the automatic start or PLC program.
6 - 95
6 POSITIONING CONTROL
6.15 Speed/Position Switching Control
6.15.1 Speed/position switching control start
Speed/position switching control for specified axis is executed.
Speed/position switching control uses the VPF (Forward rotation), VPR (Reverse
rotation) and VPSTART (Re-start) servo instructions.
VPF
VPR
Others
WAIT-ON/OFF
Cancel
Speed change
S-curve ratio
Allowable error range for circular interpolation
Torque limit value
Deceleration processing on stop input
Rapid stop deceleration time
Deceleration time
Speed limit value
Acceleration time
Central point
Parameter block
Control unit
Auxiliary point
Torque limit value
M-code
Command speed
1
Dwell time
Incremental
Address/travel value
Number of
control axes
Axis
Positioning
method
Parameter block No.
Servo
instruction
Arc
Radius
Items set using MT Developer
Common
Valid
: Must be set
: Set if required
[Control details]
(1) The speed control is executed after the start of the servomotor, and changes from
speed control to position control with the CHANGE (Speed/position switching)
signal from external source, and then the specified positioning travel value is
executed.
• VPF...... Forward rotation direction (Address increase direction) start
• VPR….. Reverse rotation direction (Address decrease direction) start
(2) The CHANGE signal from external source is effective during speed/position
switching enable signal (M3205+20n) is on only. If M3205+20n turns on after the
CHANGE signal turned on, it does not change from speed control to position
control and speed control is continued.
V
Setting travel value
Speed
controlling
ON
Speed/position
switching enable signal
(M3205+20n)
OFF
CHANGE signal input
from external source (Note)
6 - 96
Position
controlling
CHANGE signal valid
t
6 POSITIONING CONTROL
REMARK
(Note): "The external CHANGE signal input from external source" is inputted to
CHANGE of the Q172DLX from external source. When "normally open
contact input" is set in the system settings, CHANGE input occurs at the
CHANGE signal on, and when "normally closed contact input" is set,
CHANGE input occurs at the CHANGE signal off. (Refer to the
"Q173DCPU/Q172DCPU Motion controller User's Manual".)
(3) Feed current value processing
The feed current value is as follows by turning feed current value update request
command (M3212+20n) on/off at the speed/position switching control start.
(a) M3212+20n OFF...... • The feed current value is cleared to "0" at the start.
• The feed current value is updated from the start
(speed control).
• The feed current value after stop is as follows:
Feed current
value after stop
=
Travel value
during speed
control
Travel value
for position
control
+
(b) M3212+20n ON..….. • The feed current value is not cleared at the start.
• The feed current value is updated from the start
(speed control).
• If the feed current value exceeds the stroke limit, a
deceleration stop is executed.
• The feed current value after stop is as follows:
Feed current
value after stop
=
Address
before speed
control start
+
Travel value
during speed
control
[M3212+20n OFF]
Feed
current * *
value
CHANGE input
Speed
controlling
Position
controlling
0
Update feed current value
Travel value
for position
control
[M3212+20n ON]
CHANGE input
Speed
controlling
+
Feed
current
value
**
Position
controlling
**
Update feed current value
Clear feed current value
ON
M3212
OFF
+20n
M3212
OFF
+20n
POINT
If it is started with M3212+20n on, leave M3212+20n on until positioning control is
completed. If it is turns off during control, the feed current value cannot be
guaranteed.
6 - 97
6 POSITIONING CONTROL
(4) Change of the travel value during speed control
The travel value for position control can be changed during speed control after
speed/position control start.
(a) The travel value is set in indirect specification by optional device (2-word
data) in the servo program.
Example
The following servo program which performs the speed control for axis 4 to the
forward direction at speed 50000, and the position control of the travel value set in
D3000, D3001 after the CHANGE signal from external source turns on.
<K 11>
VPF
Axis
Speed
4,
Indicates indirect specification of travel value
D3000
50000
(b) The travel value is stored in the data register for travel value change during
speed control in the Motion SFC program. When the CHANGE signal turns
on, the contents of the data register for travel value change are set as the
travel value.
V
Speed
controlling
Position
controlling
t
Travel value
change possible
CHANGE signal input
from external source
ON
OFF
Data register for travel
value change
P1
P2
P3
P2 is reset as the travel value
(5) Travel value area after proximity dog ON
The travel value since the position mode was selected by the CHANGE signal
input from external source is stored in the travel value storage register after
proximity dog ON. (Refer to Section 3.2.1)
6 - 98
6 POSITIONING CONTROL
[Cautions]
(1) Item check at the CHANGE signal ON from external source
When the external CHANGE signal turns on, speed control switches to position
control if the following conditions are met:
• Start accept flag (M2001+n) is turning on.
• Speed control is executing after starting of the speed/position switching control.
• Speed/position switching enable command (M3205+20n) is turning on.
(2) No speed control
Position control only is executed if M3205+20n and CHANGE signal are turning
on at the start. The speed controlling signal (M2404+20n) does not turn on.
V
OFF
Speed switching signal
input (CHANGE)
OFF
Servo program start
OFF
Speed/position switching
latch (M2405+20n)
t
ON
Speed/position switching
enable command (M3205+20n)
Speed controlling (M2404+20n)
Position control only is executed, if M3205+20n
and CHANGE are turning on at the start.
ON
OFF
ON
OFF
(3) "Travel value for position control" is less than "deceleration distance"
(a) If the travel value for position control is less than the deceleration distance at
controlling speed, deceleration processing starts immediately when
CHANGE is input.
(b) The difference between travel value for the deceleration stop and position
control is the overrun. At this time, the error detection signal (M2407+20n)
turns on and error code [209] is stored in the data register.
(c) The positioning complete signal (M2401+20n) does not turn on.
V
Travel value for
position control
Overrun
Speed/position switching
enable command (M3205+20n) OFF
ON
Position switching signal
input (CHANGE)
ON
OFF
Error detection (M2407+20n)
OFF
Positioning complete signal
(M2401+20n)
OFF
t
ON
6 - 99
6 POSITIONING CONTROL
(4) Stroke limit check
Stroke limit range is not checked during the speed mode. If the travel value
exceeds the stroke limit range, a minor error (error code: 210) occurs when
position mode is selected, and performs a deceleration stop.
[Program]
Program for speed/position switching control is shown as the following conditions.
(1) System configuration
Speed/position switching control of Axis 4.
Motion CPU control module
Q61P Q03UD Q172D QX41
CPU
CPU
QY41 Q172D
LX
Start command (PX000)
AMP
AMP
Axis
2 M
Axis
1 M
AMP
Axis
3 M
AMP
Axis
4 M
(2) Positioning conditions
(a) Positioning conditions are shown below.
Item
Servo program No.
Positioning conditions
101
Control axis
Travel value for positioning control
40000
Axis 4
Command speed
1000
(b) Positioning start command .................................. PX000 Leading edge
(c) Speed/position switching enable command ........ M3265
(3) Operation timing
Operation timing for speed/position switching control is shown below.
6 - 100
6 POSITIONING CONTROL
V
Speed control
Position control
Servo program No.101
t
1second
1second
PLC ready flag (M2000)
All axes servo ON command
(M2042)
All axes servo ON accept flag
(M2049)
Axis 4 servo ready (M2475)
Start command (PX000)
Servo program start
Axis 4 start accept flag (M2004)
Speed/position switching enable
command (M3265)
CHANGE signal input of the
Q172DLX
Speed/position switching latch
(M2465)
Axis 4 positioning completion
(M2461)
(4) Servo program
Servo program No.101 for speed/position switching control is shown below.
<K 101>
VPF
Axis
Speed
Dwell
Speed/position switching control
4,
40000
1000
1000
Axis used . . . . . Axis 4
Travel value . . . 40000
Speed . . . . . . . 1000
Dwell . . . . . . . . 1000
(Note): Example of the Motion SFC program for positioning control is shown next page.
6 - 101
6 POSITIONING CONTROL
(5) Motion SFC program
Motion SFC program for which executes the servo program is shown below.
Speed/position switching control
Speed/position
switching control
[F10]
SET M2042
Turn on all axes servo ON command.
[G10]
PX000*M2475
Wait until PX000 and Axis 4 servo ready turn on.
[F20]
SET M3265
Axis 4 speed/position switching enable command ON.
[K101] VPF
Axis
4,
Speed
Dwell
[G20]
40000PLS
1000PLS/s
1000ms
Speed/position switching control
Axis used . . . . . . . . . . Axis 4
Travel value . . . . . . . . 40000PLS
Command speed . . . . . 1000PLS/s
Dwell . . . . . . . . . . . . . . 1000ms
M2465
Axis 4 speed/position switching latch
[F30]
RST M3265
Axis 4 speed/position switching enable command OFF
[G30]
!PX000*M2461
Wait until positioning completion and PX000 turn off.
END
Note : Shift transition is used to transit into the next processing during the positioning.
(Note): Example of the above Motion SFC program is started using the automatic start or PLC program.
6 - 102
6 POSITIONING CONTROL
6.15.2 Re-starting after stop during control
Re-starting (continuing) after stop with stop command during speed/position switching
control is executed.
Re-starting uses VPSTART servo instruction.
Others
WAIT-ON/OFF
Cancel
Speed change
S-curve ratio
Allowable error range for circular interpolation
Torque limit value
Deceleration processing on stop input
Rapid stop deceleration time
Deceleration time
Speed limit value
Acceleration time
Central point
Parameter block
Control unit
Auxiliary point
Torque limit value
M-code
1
Command speed
Incremental
Dwell time
VPSTART
Address/travel value
Number of
control axes
Axis
Positioning
method
Parameter block No.
Servo
instruction
Arc
Radius
Items set using MT Developer
Common
Valid
: Must be set
: Set if required
[Control details]
(1) The continuous control after stop during speed control is executed, after speed/
position switching control start.
(2) Re-starting using the VPSTART is effective by stop during speed control or
position control.
(a) Re-starts with the speed control at the stop during speed control, then
switches to position control by turning on the CHANGE signal.
• The control contents after re-starting are same as the speed/position
switching control. Refer to Section "6.15.1 Speed/position switching
control start".
V
Setting travel value
Speed
controlling
Speed/position
switching enable command
(M3205+20n)
CHANGE signal input
from external source
ON
Position
controlling
CHANGE signal valid
OFF
Fig. 6.27 Re-starting during speed control
6 - 103
t
6 POSITIONING CONTROL
(b) If the stop occurred during position control, re-start with position, and the
positioning control of setting travel value.
The travel value after the re-start is calculated as follows:
Travel value
after re-start
(P2)
=
Setting travel
value(P)
Travel value
before stop
(P1)
-
P1: Travel value before stop
P2: Travel value after restart
V
Operation speed
CHANGE
signal ON
Restart
Speed/position
switching control
start
P1
Stop
P2
t
Speed
control
Servo program start
Stop command accept
Position
control
Position
control
VPF/VPR instruction
VPSTART
Stop command
(M3200+20n)
Speed/position switching
enable command (M3205+20n)
ON
OFF
Fig.6.28 Re-starting during speed control
(3) It controls at the speed stored at the VPF/VPR instruction execution in the restarting.
Therefore, even if the speed change before stop during control, it becomes the
speed at the VPF/VPR instruction execution.
V
Speed change
Setting
speed
Operation speed
CHANGE signal ON
Stop command
Restart
t
Speed control
Speed
control
Fig.6.29 Re-starting after speed change
6 - 104
Position
control
6 POSITIONING CONTROL
[Program]
Program for restarting after stop during control with the speed/position switching
control is shown as the following conditions.
(1) System configuration
Speed/position switching control of Axis 4.
Motion CPU control module
Q61P Q03UD Q172D QX41
CPU
CPU
QY41 Q172D
LX
Start command (PX000), restart command (PX001),
stop command (PX002)
AMP
Axis
1 M
AMP
Axis
2 M
AMP
Axis
3 M
AMP
Axis
4 M
(2) Positioning conditions
(a) Positioning conditions are shown below.
Positioning conditions
Item
Speed/position
switching control
Servo program No.
Control axis
Travel value for
Restart
101
102
Axis 4
Axis 4
40000
positioning control
Command speed
1000
(b) Positioning start command ................................... PX000 Leading edge
(OFF ON)
(c) Speed/position switching enable command ......... M3265
(d) Re-start command ................................................. PX001 Leading edge
(OFF ON)
(e) Stop command ..................................................... PX002 Leading edge
(OFF ON)
6 - 105
6 POSITIONING CONTROL
(3) Operation timing
Operation timing for speed/position switching control and re-starting are shown
below.
V
CHANGE signal accept
1000
Speed
control
Position control
t
PLC ready flag (M2000)
All axes servo ON command
(M2042)
All axes servo ON accept flag
(M2049)
Axis 4 servo ready (M2475)
Start command (PX000)
Restart command (PX001)
Servo program start
Axis 4 start accept flag
(M2004)
Speed/position switching enable
command (M3265)
CHANGE signal input of the
Q172DLX
Speed/position switching latch
(M2465)
Stop command (PX002, M3260)
(4) Servo program
Servo program No.101 and No.2 for speed/position control and re-starting are
shown below.
<K 101>
VPF
Axis
Speed
4,
40000
1000
Speed/position switching control
Axis used . . . . . Axis 4
Travel value . . . 40000
Speed . . . . . . . . . . 1000
<K 102>
VPSTART
Axis
4
Re-start
Axis used . . . . . . . Axis 4
(Note): Example of the Motion SFC program for positioning control is shown next page.
6 - 106
6 POSITIONING CONTROL
(5) Motion SFC program
Motion SFC program for which executes the servo program is shown below.
Re-starting after stop during speed/position switching control
Re-starting after stop
during control
[F10]
[G10]
[F20]
SET M2042
Turn on all axes servo ON command.
PX000*M2475
Wait until PX000 and Axis 4 servo ready turn on.
SET M3265
Axis 4 speed/position switching enable command ON
[K101] VPF
Axis
Speed
4,
40000PLS
1000PLS/s
[G20]
SET M3260=PX002
RST M3265=M2465
!M2004
[G30]
M3260
Speed/position switching control for Axis 4
Axis used . . .. . . . . Axis 4
Travel value . .. . . . 40000[PLS]
Command speed . . . 1000[PLS/s]
Axis 4 stop command ON with PX002 ON .
Speed/position switching enable command OFF with axis 4
speed/position switching latch ON.
Axis 4 start accept flag OFF.
End with stop
due to error.
END
[G40]
[F30]
PX001
Wait until PX001 turn on.
RST M3260
Axis 4 stop command OFF
[K102] VPSTART
Axis
4
Re-start
Axis used . . .. . . . . Axis 4
[G50]
RST M3265=M2465
!M2004
Speed/position switching enable command OFF with axis 4
speed/position switching latch ON.
Axis 4 start accept flag OFF.
!PX000*!PX001*!PX002
Wait until PX000, PX001 and PX002 turn off with
re-starting after stop during speed-position switching
control.
[G60]
END
(Note): Example of the above Motion SFC program is started using the automatic start or PLC program.
6 - 107
6 POSITIONING CONTROL
6.16 Speed-Switching Control
(1) Positioning control performs changing the speed on the point beforehand set by
one start.
(2) The speed-switching points and speed are set using the servo program.
(3) Repetition control between any speed-switching points can be performed by using
repetition instructions.
(4) M-codes and torque limit values can be changed at each speed-switching point.
6.16.1 Speed-switching control start, speed-switching points and end specification
Start
VSTART
End
VEND
ABS-1
End point
address
Travel
value to
end point
SpeedSwitching
point
ABS-2
WAIT-ON/OFF
Cancel
Speed change
S-curve ratio
Allowable error range for circular interpolation
Torque limit value
Deceleration processing on stop input
Rapid stop deceleration time
Deceleration time
Speed limit value
Acceleration time
Central point
Control unit
Auxiliary point
Torque limit value
M-code
Command speed
Dwell time
Address/travel value
Others
1
Absolute data
2
ABS-3
3
INC-1
1
INC-2
Parameter block
Number of
control axes
Axis
Positioning
method
Parameter block No.
Servo
instruction
Arc
Radius
Items set using MT Developer
Common
Incremental
INC-3
Valid
2
3
VABS
Absolute data
VINC
Incremental
: Must be set
: Set if required
6 - 108
6 POSITIONING CONTROL
[Control details]
Start and end of the speed-switching control
Speed-switching control is started and ended using the following instructions:
(1) VSTART
Starts the speed-switching control.
(2) VEND
Ends the speed-switching control.
Travel value setting to end address/end point
The travel value to end address/end point with the speed-switching control, positioning
control method and positioning speed to the end point are set using the following
instructions:
(1) ABS-1/INC-1
Set 1 axis linear positioning control.
The control contents are same as Section 6.2 "1 Axis Linear Positioning Control".
(2) ABS-2/INC-2
Set 2 axes linear interpolation control.
The control contents are same as Section 6.3 "2 Axes Linear Interpolation
Control".
(3) ABS-3/INC-3
Set 3 axes linear interpolation control.
The control contents are same as Section 6.4 "3 Axes Linear Interpolation
Control".
Speed-switching point setting
The address (travel value) of the speed-switching point and the positioning speed are
set using the following instructions:
(1) VABS
Set the speed-switching point using the absolute data method.
(2) VINC
Set the speed-switching point using the incremental data method.
POINT
The axis which set the speed-switching point (travel value) and positioning speed
by 2 or 3 axes linear interpolation control is first set in the "travel value to end
address/end point".
<K 101>
VSTART
ABS-2
Axis
Axis
Speed
2,
3,
75000
60000
2000
6 - 109
Set the speed-switching point (travel value) and
positioning speed.
6 POSITIONING CONTROL
Procedure of the servo program and operation timing
Servo programs for speed-switching control and the operation timing are shown below.
[Servo program]
Start
<K 101>
VSTART
ABS-2
Axis
Axis
Speed
VABS
Axis
Speed
VABS
Axis
Speed
VABS
Axis
Speed
VEND
Start speed-switching control
Specify end address
Specify speed-switching point
NO
4,
3,
80000
. . . P1
60000
2000
4,
20000 . . . P2
7000
4,
60000 . . . P3
6000
4,
70000 . . . P4
4000
All speed-switching
points specified ?
YES
End speed-switching control
END
[Operation timing]
Axis 3 positioning direction
P1
60000
P3
P4
P2
70000
0
V
20000
60000
80000
Axis 4 positioning direction
Speed-switching
point (P2)
Speed-switching point
5000
Stop (P1)
t
0
6 - 110
6 POSITIONING CONTROL
[Cautions]
(1) The number of control axes cannot be changed during control.
(2) The speed-switching point can be specified the absolute data method (VABS)
and incremental data method (VINC) by mixed use.
(3) The speed-switching point cannot be specified an address which change in travel
direction. If the travel direction change, the error code [215] is stored in the minor
error storage register for each axis and the deceleration stop is performed.
(4) It checks whether to be the end address within the stroke limit range at the start.
If it is positioning to outside the stroke limit range, the error code [106] is stored in
the minor error storage register for each axis and operation does not start.
(5) If the travel value between speed-switching points is so short and it shifts to the
next speed-switching point during speed-switching control, the speed-switching
does not perform.
(6) The M-code from the previous point is retained in the point with which M-code is
not specified.
[Program]
Program for speed-switching is shown as the following conditions.
(1) System configuration
Speed-switching control of Axis 2 and Axis 3.
Motion CPU control module
Q61P Q03UD Q172D QX41
CPU
CPU
QY41 Q172D
LX
Start command (PX000)
AMP
Axis
1 M
AMP
Axis
2 M
AMP
AMP
Axis
3 M
Axis
4 M
(2) Positioning conditions
(a) Speed-switching control conditions are shown below.
Item
Setting
Servo program No.
500
Control axis
Axis 2
Axis 3
End address
100000
50000
(b) Speed-switching control start command ....... PX000 Leading edge
(OFF ON)
6 - 111
6 POSITIONING CONTROL
(3) Operation timing and speed-switching positions
Operation timing and speed-switching points for speed-switching control are
shown below.
Axis 3 positioning direction
50000
V
40000
0
70000
Axis 2 positioning
direction
100000
8000
5000
2000
t
ON
PLC ready flag (M2000)
OFF
All axes servo ON command
(M2042)
All axes servo ON accept flag
(M2049)
Axis 2 servo ready (M2435)
Axis 3 servo ready (M2455)
Start command (PX000)
ON
OFF
Servo program start
ON
Axis 2 start accept flag (M2002)
OFF
Axis 3 start accept flag (M2003)
OFF
ON
(4) Servo program
Servo program No.500 for speed-switching control is shown below.
<K 500>
VSTART
ABS-2
Axis
Axis
Speed
VABS
Axis
Speed
VABS
Axis
Speed
VEND
2,
3,
100000
50000
2000
2,
40000
8000
2,
70000
5000
Start speed/position switching control
2 axes linear interpolation control (absolute data method)
Axis used . . . Axis 2, Axis 3
End address
Axis 2 . . . 100000
Axis 3 . . . . 50000
Positioning speed . . . . . . . . . . 2000
Speed-switching point, speed setting
Indicated axis No.
Speed-switching point
Speed to speed-switching point
Axis 2
40000 70000
8000
5000
End speed switching control
(Note): Example of the Motion SFC program for positioning control is shown next page.
6 - 112
6 POSITIONING CONTROL
(5) Motion SFC program
Motion SFC program for which executes the speed-switching control is shown
below.
Speed-switching control
Speed-switching control
[F10]
[G10]
SET M2042
Turn on all axes servo ON command.
PX000*M2435*M2455
Wait until PX000, Axis 2 servo ready and Axis 3 servo
ready turn on.
[K500] VSTART
ABS-2
Axis
2, 100000PLS
Axis
3, 50000PLS
Speed
2000PLS/s
VABS
Axis
2, 40000PLS
Speed
8000PLS/s
VABS
Axis
2, 70000PLS
Speed
5000PLS/s
VEND
[G20]
Start speed-switching control
2 axes linear interpolation control (absolute data method)
Axis used . . . . . . . . . . . Axis 2, Axis 3
Axis 2 . . . 100000[PLS]
End address
Axis 3 . . . . 50000[PLS]
Positioning speed . . . . . . . .. . 2000[PLS/s]
Speed-switching point, speed setting
Axis2
Indicated axis No.
Speed-switching point
40000 70000
Speed to speed-switching point 8000 5000
(Unit : Point [PLS]/speed[PLS/s])
End speed-switching control
Wait until PX000 turn off after speed-switching control
completion.
!PX000
END
(Note): Example of the above Motion SFC program is started using the automatic start or PLC program.
6 - 113
6 POSITIONING CONTROL
6.16.2 Specification of speed-switching points using repetition instructions
Repetition execution between any speed-switching points.
Items set using MT Developer
Others
WAIT-ON/OFF
Repeated condition
Cancel
Speed
change
S-curve ratio
Allowable error range for circular interpolation
Torque limit value
Deceleration time
Speed limit value
Acceleration time
Central point
Control unit
Radius
Auxiliary point
Torque limit value
M-code
Command speed
Dwell time
Address/travel value
Deceleration processing on stop input
Parameter block
Number of
control axes
Axis
Positioning
method
Parameter block No.
Servo
instruction
Arc
Rapid stop deceleration time
Common
FOR-TIMES
FOR-ON
FOR-OFF
NEXT
: Must be set
: Set if required
[Control details]
First repetition range setting
The first repetition range is set using the following instructions:
(1) FOR-TIMES (number of loops setting)
(a) The repetition range set specified number of times is executed repeatedly.
(b) The setting range is 1 to 32767.
Outside the range of 32768 to 0 is controlled as a setting of "1".
(c) The following devices can be used as the repetition number of times:
1) Data register (D)
2) Link register (W)
For indirect setting
3) Motion register (#)
4) Multiple CPU area device(U \G)
5) Decimal constant (K)
6) Hexadecimal constant (H)
(2) FOR-ON (loop-out trigger condition setting)
(a) The repetition range set until the specified bit device turns on is executed
repeatedly.
(b) The following devices are used as the loop-out trigger condition:
1) Input (X/PX)
2) Output (Y/PY)
3) Internal relay (M)
4) Special relay (SM)
5) Link relay (B)
6) Annunciator (F)
6 - 114
6 POSITIONING CONTROL
(3) FOR-OFF (loop-out trigger condition setting)
(a) The repetition range set until the specified bit device turns off is executed
repeatedly.
(b) The following devices are used as the loop-out trigger condition:
1) Input (X/PX)
2) Output (Y/PY)
3) Internal relay (M)
4) Special relay (SM)
5) Link relay (B)
6) Annunciator (F)
Operation of the repetition control using FOR-TIMES, FOR-ON, and FOR-OFF is
shown below.
[Servo program]
<K 701>
VSTART
INC-2
Axis
1,
Axis
2,
Speed
VINC
Axis
1,
Speed
1)
VINC
Axis
Speed
VINC
Axis
Speed
NEXT
VEND
1)
230000
10000
2000
FOR-TIMES
40000
2000
30000
500
1,
20000
1000
3)
Condition 1
Condition 2
K1
K2
Condition 3
K3
FOR-ON
X010
ON
X010
ON during first
execution of
from start
3)
X010
ON
during third
execution of
3)
FOR-OFF
X011
OFF
X011
OFF during first
execution of
from start
3)
X011
OFF
during third
execution of
3)
2)
1,
2)
(1) Operation in condition 1
2000
1000
0
100000
200000
ON
X010
OFF
X011
ON
OFF
(2) Operation in condition 2
2000
1000
0
X010
X011
100000
ON
OFF
ON
OFF
6 - 115
200000
6 POSITIONING CONTROL
(3) Operation in condition 3
Minor error [215] occurred
2000
1000
0
100000
200000
ON
X010
X011
OFF
ON
OFF
Error occurs because it exceeds the travel value to the stop position.
[Program]
Program for repetition speed-switching control is shown as the following conditions.
(1) System configuration
Speed-switching control of Axis 2 and Axis 3.
Motion CPU control module
Q61P Q03UD Q172D QX41
CPU
CPU
QY41 Q172D
LX
Start command (PX000)
AMP
Axis
1 M
AMP
Axis
2 M
AMP
AMP
Axis
3 M
Axis
4 M
(2) Positioning conditions
(a) Speed-switching control conditions are shown below.
Item
Setting
Servo program No.
501
Control axes
Axis 2
Axis 3
End address
230000
100000
(b) Speed-switching control start command ...... PX000 Leading edge
(OFF ON)
6 - 116
6 POSITIONING CONTROL
(3) Operation timing and speed-switching positions
Operation timing and speed-switching points for speed-switching control are
shown below.
Axis 3 positioning direction
100000
50000
V 0
50000
100000
150000
200000
Axis 2 positioning
direction
50 0 0 0
t
0
PLC ready flag (M2000)
All axes servo ON command
(M2042)
All axes servo ON accept flag
(M2049)
Axis 2 servo ready (M2435)
Axis 3 servo ready (M2455)
Start command (PX000)
Servo program start
Axis 2 start accept flag (M2002)
Axis 3 start accept flag (M2003)
6 - 117
6 POSITIONING CONTROL
(4) Servo program
Servo program No. 501 for speed-switching control by the repetition instruction is
shown below.
<K 501>
VSTART
INC-2
Axis
2,
Axis
3,
Speed
VINC
Axis
2,
Speed
FOR-TIMES
230000
100000
10000
40000
40000
K
VINC
Axis
Speed
VINC
Axis
Speed
NEXT
VEND
2,
2,
2
30000
20000
50000
40000
Starts speed-switching control
2 axes linear interpolation control (incremental data method)
Axis used . . . . .. . . . . .. . . . .. Axis 2, Axis 3
Travel value to stop position Axis 2 . . . 230000
Axis 3 . . . 100000
Positioning speed
Speed-switching point, speed setting
Indicated axis . . . . . . . . . . . . . . . . . . . . . Axis 2
Travel value to speed-switching point . . . 40000
Speed to speed-switching point . . . . . . . . . . 40000
Number or repetition 2
Speed-switching point, speed setting
Indicated Axis No.
Axis 2
Speed-switching point
30000 50000
Speed to speed-switching point
20000 40000
End repetition region
End speed-switching control
(Note): Example of the Motion SFC program for positioning control is shown next page.
6 - 118
6 POSITIONING CONTROL
(5) Motion SFC program
Motion SFC program for which executes speed-switching control using repetition
instructions is shown below.
Specification of speed-switching points using repetition instructions
points using repeat
Speed-switching
control
using
repetition instructions
instructions
[F10]
SET M2042
Turn on all axes servo ON command.
[G10]
PX000*M2435*M2455
Wait until PX000, Axis 2 servo ready and Axis 3 servo ready
turn on.
[K501] VSTART
INC-2
Axis
2, 230000PLS
Axis
3, 100000PLS
10000PLS/s
Speed
VINC
40000PLS
Axis
2,
Speed
40000PLS/s
FOR-TIMES
K 2
VINC
Axis
2,
30000PLS
20000PLS/s
Speed
VINC
50000PLS
Axis
2,
Speed
40000PLS/s
NEXT
VEND
[G20]
Starts speed-switching control
2 axes linear interpolation control (incremental data method)
Axis used . . . . . . . . . . . . . . . . Axis 2, Axis 3
Travel value to . . . . . . . . .
Axis 2 . . . 230000
stop position
Axis 3 . . . 100000
Positioning speed . . . 10000[PLS/s]
Speed-switching point, speed setting
Indicated axis . . . Axis 2
Travel value to speed-switching point . . . 40000[PLS]
Speed to speed-switching point . . .. . . . . . . 40000[PLS/s]
Number of repetitions 2
Speed-switching point, speed setting
Indicated axis No.
Axis 2
Speed-switching point
30000 50000
Speed to speed-switching point 20000 40000
(Unit : Point [PLS]/speed [PLS/s])
End repetition region
End speed-switching control
Wait until PX000 turn off after speed switching control
completion.
!PX000
END
(Note): Example of the above Motion SFC program is started using the automatic start or PLC program.
6 - 119
6 POSITIONING CONTROL
6.17 Constant-Speed Control
(1) Positioning to the pass point beforehand set by one starting is executed with the
specified positioning method and positioning speed.
(2) The positioning method and positioning speed can be changed for each pass
point.
(3) The following parameters is set in the servo program.
• Pass point
• Positioning method from any pass point to the next pass point.
• Positioning speed from any pass point to the next pass point.
(4) Repetition control between any pass points can be performed by using repetition
instructions.
(5) M-codes and torque limit values can be changed at each speed-switching point.
(6) 1 to 4 axes can be controlled.
[Procedure to write servo programs]
The method to write the servo programs for constant-speed control is shown below.
[Procedure]
[Example : Servo program for 2 axes
constant-speed control]
Start
Set the constant-speed control
axis and speed
Set the each pass point
Point
4
1
Set the positioning method
2
Set the positioning address
(travel value)
3
Set the speed-switching
4
NO
All pass points are set ?
YES
End constant-speed control
End
6 - 120
<K
1>
CPSTART
Axis
Axis
Speed
ABS-2
Axis
Axis
ABS-2
Axis
Axis
Speed
ABS-2
Axis
Axis
CPEND
2
3
10000 [PLS/s]
2,
3,
40000 [PLS]
60000 [PLS]
2,
3,
60000 [PLS]
60000 [PLS]
15000 [PLS/s]
2,
3,
100000 [PLS]
80000 [PLS]
6 POSITIONING CONTROL
[Operation timing]
Operation timing for constant-speed control is shown below.
[Example : Operation timing for 2 axes constant-speed control]
Axis 3 positioning direction
P3
80000
P1
60000
P2
100000
0
Positioning speed
for 2 axes linear
interpolation
V
Axis2 positioning direction
40000 60000
Change speed after speed-switching
15000
Set
speed
10000
t
0
[Caution]
(1) The number of control axes cannot be changed during control.
(2) The pass point can be specified the absolute data method (ABS ) and
incremental method (INC ) by mixed use.
(3) The pass point can also be specified an address which change in travel direction.
The acceleration processing at a pass point is executed for 1 axis constant-speed.
However, the acceleration/deceleration processing at a pass point is not executed
for 2 to 4 axes constant-speed, so be careful of the servo error occurrence, etc.
(4) Speed change is possible after the start.
Note the following points at the speed change.
(a) The central point-specified circular interpolation is included the constantspeed control.
When the arc path calculated from the start address and central-point
address is differ (within the allowable error range for circular interpolation)
from the setting end address, if the speed is changed, error compensation
(Refer to Section 4.3.3) may not function normally.
When the central point-specified circular interpolation as positioning method
is used at the constant-speed control, set the start address, central point
address and end address becomes arc correctly.
6 - 121
6 POSITIONING CONTROL
(b) The speed switching and change speed by CHGV instruction are executed
toward the same program in the servo program.
The lower of the speed change by CHGV instructions and the command
speed in the servo program is selected.
The speed change by CHGV instructions are executed if the speed is lower
than the speed set in the servo program; otherwise the CHGV instructions
are not executed.
1) Change speed by CHGV instruction > command speed in the servo
program
The command speed in the servo program is selected.
V
Command speed in the servo program
Speed change by CHGV instruction
Speed change to command speed in the servo program
t
2) Change speed by CHGV instruction < command speed in the servo
program
The change speed by CHGV instructions is effective.
V
Speed change by command speed in the servo program
(Speed set by the CHGV instructions is valid)
t
Speed change by CHGV instructions
(Speed does cot change due to more than command speed in the servo program.)
(5) An overrun occurs if the distance remaining to the final positioning point when the
final positioning point is detected is less than the deceleration distance at the
positioning speed after the start (command speed).
The error code [211] (overrun error) is stored in the minor error storage register
for each axis.
(6) If positioning to outside the stroke limit range is executed after the start, the error
code [106] is stored in the minor error storage register for each axis and a
deceleration stop is executed.
(7) The minimum travel value between constant-speed control pass points is shown
below:
Command speed per second (control unit/s)
6 - 122
Main cycle [s] < Travel distance [control unit]
6 POSITIONING CONTROL
Example) Main cycle: 20[ms], Command speed: 600[mm/min]
If the command speed (600[mm/min]) is divided by 60, the command
speed per second is 10[mm/s], and the main cycle is 0.02[s].
Therefore, the travel distance is as follow.
10[mm/s]
0.02[s] = 0.2[mm]
Set the travel distance to more than 0.2[mm].
Positioning speed drops if the distance between pass points is short
the minimum travel value.
6 - 123
6 POSITIONING CONTROL
6.17.1 Specification of pass points by repetition instructions
This section describes the method of the pass points for which executes between any
pass points repeatedly.
WAIT-ON/OFF
Repeated Condition
Speed
change
Cancel
Allowable Error Range for Circular Interpolation
Others
S- Curve Ratio
Deceleration Processing on Stop Input
Rapid Stop Deceleration Time
Deceleration Time
Speed Limit Value
Acceleration Time
Control Unit
Central point
Auxiliary Point
Torque Limit Value
M Code
Command speed
Dwell Time
Address/Travel Value
Torque Limit Value
Parameter block
Number of
control axes
Axis
Positioning
method
Parameter Block No.
Servo
instruction
Arc
Radius
Items set using MT Developer
Common
FOR-TIMES
FOR-ON
FOR-OFF
NEXT
: Must be set
: Set if required
[Control details]
Setting the first of repetition range
The first of repetition range is set by the following instructions:
(1) FOR-TIMES (number of loops setting)
(a) The repetition range set specified number of times is executed repeatedly.
(b) The setting range is 1 to 32767.
Outside the range of 32768 to 0 is controlled as a setting of "1".
(c) The following devices can be used as the repetition number of times:
1) Data register (D)
2) Link register (W)
For indirect setting
3) Motion register (#)
4) Multiple CPU area device (U \G)
5) Decimal constant (K)
6) Hexadecimal constant (H)
(2) FOR-ON (Loop-out trigger condition setting)
(a) The repetition range set until the specified bit device turns on is executed
repeatedly.
(b) The following devices are used as the loop-out trigger condition:
1) Input (X/PX)
2) Output (Y/PY)
3) Internal relay (M)
4) Special relay (SM)
5) Link relay (B)
6) Annunciator (F)
6 - 124
6 POSITIONING CONTROL
(3) FOR-OFF (loop-out trigger condition setting)
(a) The repetition range set until the specified bit device turns off is executed
repeatedly.
(b) The following devices are used as the loop-out trigger condition:
1) Input (X/PX)
2) Output (Y/PY)
3) Internal relay (M)
4) Special relay (SM)
5) Link relay (B)
6) Annunciator (F)
The repetition control operation using FOR-TIMES, FOR-ON and FOR-OFF is shown
below.
[Servo program]
<K 701>
CPSTART
Axis
Axis
Speed
ABS-2
Axis
Axis
1)
1)
1
2
1000
1,
2,
FOR-TIMES
40000
20000
2)
INC-2
Axis
Axis
INC-2
Axis
Axis
NEXT
CPEND
1,
2,
1,
2,
20000
20000
Condition 2
Condition 3
K1
K2
K3
FOR-ON
ON
X010
during first
positioning 3)
X010
X010
ON
ON
during second during third
positioning 3) positioning 3)
FOR-OFF
OFF
X011
during first
positioning 3)
X011
OFF X011
OFF
during second during third
positioning 3) positioning 3)
30000
0
3)
2)
Condition 1
Axis 2
Repeat 3)
Operation in condition 3
Operation in condition 2
50000
0
Operation in condition 1
100000
6 - 125
200000
Axis 1
6 POSITIONING CONTROL
[Program]
Program for repetition constant-speed control is shown as the following conditions.
(1) System configuration
Constant-speed control for Axis 2 and Axis 3.
Motion CPU control module
Q61P Q03UD Q172D QX41
CPU
CPU
QY41 Q172D
LX
Start command (PX000)
AMP
Axis
1 M
AMP
Axis
2 M
AMP
Axis
3 M
AMP
Axis
4 M
(2) Positioning conditions
(a) Constant-speed control conditions are shown below.
Item
Setting
Servo program No.
510
Control axis
Axis 2, Axis 3
Positioning speed
10000
(b) Constant-speed control start command ....... PX000 Leading edge
(OFF ON)
6 - 126
6 POSITIONING CONTROL
(3) Operation timing
Operation timing for constant-speed control is shown below.
Axis 3 positioning direction
100000
80000
60000
40000
Radius
20000
20000
0
50000
100000
V
150000
200000
Axis 2
positioning
direction
10000
Vector
speed
t
PLC ready flag (M2000)
All axes servo ON command
(M2042)
All axes servo ON accept flag
(M2049)
Axis 2 servo ready (M2435)
Axis 3 servo ready (M2455)
Start command (PX000)
Servo program start
Axis 2 start accept flag (M2002)
Axis 3 start accept flag (M2003)
6 - 127
6 POSITIONING CONTROL
(4) Servo program
Servo program No.510 for constant-speed control is shown below.
<K 510>
CPSTART2
Axis
Axis
Speed
ABS-2
Axis
Axis
FOR-TIMES
INC-2
Axis
Axis
INC
Axis
Axis
Radius
NEXT
CPEND
2
3
10000
2,
3,
40000
20000
K
4
2,
3,
30000
0
2,
3,
20000
20000
20000
Start constant-speed control
Axis used . . . . . . . . . Axis 2, Axis 3
Positioning speed . . . 10000
Pass point setting
Number of repetitions 4
Pass point setting
Positioning
method
Travel Axis 2
value Axis 3
2 axes linear Radius-specified
interpolation circular interpolation
30000
20000
0
20000
End repetition region
End constant-speed control
(5) Motion SFC program
Motion SFC program for which executes the servo program is shown below.
Constant-speed control
Constant-speed control
[F10]
SET M2042
Turn on all axes servo ON command.
[G10]
PX000*M2435*M2455
Wait until PX000, Axis 2 servo ready and Axis 3 servo
ready turn on.
[K510]
CPSTART2
Axis
2
Axis
3
Speed
10000PLS/s
ABS-2
Axis
2, 40000PLS
Axis
3, 20000PLS
FOR-TIMES
K 4
INC-2
Axis
2, 30000PLS
Axis
3,
0PLS
INC
Axis
2, 20000PLS
Axis
3, 20000PLS
Radius
20000PLS
NEXT
CPEND
[G20]
Start constant-speed control
Axis used . . . . . . . . . . Axis 2, Axis 3
Positioning speed . . . 10000[PLS/s]
2 axes linear interpolation control (Absolute data method)
Axis used . . . . . . . Axis 2, Axis 3
Axis 2 . . . 40000[PLS]
End address
Axis 3 . . . 200000[PLS]
Number of repetitions 4
Pass point setting
Positioning
method
2 axes linear Radius-specified
interpolation circular interpolation
Travel Axis 2 30000[PLS]
value Axis 3
0[PLS]
20000[PLS]
20000[PLS]
End repetition region
End constant-speed control
Wait until PX000 turns off after constant-speed control
completion.
!PX000
END
(Note): Example of the above Motion SFC program is started using the automatic start or PLC program.
6 - 128
6 POSITIONING CONTROL
6.17.2 Speed-switching by instruction execution
The speed can be specified for each pass point during the constant-speed control
instruction.
The speed change from a point can be specified directly or indirectly in the servo
program.
[Cautions]
(1) The speed switching during servo instruction is possible at the constant-speed
control for 1 to 4 axes.
(2) The speed command can be set for point.
(3) By turning on the speed-switching point specified flag M2040 (Refer to Section
3.1.3) before the start, the point which completes speed change can be specified.
The speed change timing at the flag ON/OFF.
(a) M2040 is OFF
The speed change starts with the specified speed-switching point.
V
Speed change complete point
Speed change
start point
t
Speed-switching specified point
(position)
(b) M2040 is ON
The speed change ends with the specified speed-switching point.
V
Speed change complete point
Speed change
start point
t
Speed-switching specified point
(position)
6 - 129
6 POSITIONING CONTROL
[Program]
Program for which executes the speed-switching control by turning on M2040 during
constant-speed instruction is shown as the following conditions.
(1) System configuration
Switches speed for Axis 1 and Axis 2.
Motion CPU control module
Q61P Q03UD Q172D QX41
CPU
CPU
QY41 Q172D
LX
Start command (PX000)
Speed switching point specified flag
(M2040) ON command (PX010)
AMP
Axis
1 M
AMP
AMP
Axis
2 M
Axis
3 M
AMP
Axis
4 M
(2) Positioning conditions
(a) Speed switching conditions are shown below.
Item
Setting
Servo program No.
310
Positioning speed
Positioning method
Pass point
10000
2 axes linear
interpolation
15000
Central pointspecified circular
interpolation
2 axes linear
2 axes linear
interpolation
interpolation
Axis 1
20000
30000
40000
50000
Axis 2
10000
20000
25000
40000
(b) The constant-speed start command for speed switching
..................................................................PX000 Leading edge (OFF
6 - 130
ON)
6 POSITIONING CONTROL
(3) Operation timing and speed-switching positions
Operation timing and positions for speed switching are shown below.
Axis 2 positioning direction
P4
40000
P3
P2
20000
P1
0
V
20000
Center
point
40000
Axis 1 positioning
direction
15000
10000
t
Speed switching point specified
flag (M2040)
PLC ready flag (M2000)
All axes servo ON command
(M2042)
All axes servo ON accept flag
(M2049)
Axis 1 servo ready (M2415)
Axis 2 servo ready (M2435)
Start command (PX000)
Servo program start
Axis 1 start accept flag (M2001)
Axis 2 start accept flag (M2002)
6 - 131
6 POSITIONING CONTROL
(4) Servo program
Servo program No.310 for speed-switching is shown below.
<K 310>
CPSTART2
Axis
Axis
Speed
ABS-2
Axis
Axis
ABS
Axis
Axis
Center
Center
ABS-2
Axis
Axis
Speed
ABS-2
Axis
Axis
CPEND
1
2
10000
1,
2,
20000
10000
1,
2,
1,
2,
30000
20000
30000
10000
1,
2,
40000
25000
15000
Set P1
Set P2
Set P3
1,
2,
Speed change
Set P4
50000
40000
(Note): Example of the Motion SFC program for positioning control is shown next page.
6 - 132
6 POSITIONING CONTROL
(5) Motion SFC program
Motion SFC program for which executes the servo program is shown below.
Speed-switching during instruction execution
Speed-switching during
instruction execution
[F10]
SET M2042
Turn on all axes servo ON command.
[G10]
PX000*M2415*M2435
Wait until PX000, Axis 1 servo ready and Axis 2 servo
ready turn on.
[F20]
SET M2040=PX010
RST M2040=!PX010
Speed-switching point specified flag turn on when
PX010 turn on.
Speed-switching point specified flag turn off when
PX010 turn off.
[K310]
CPSTART2
Axis
1
Axis
2
Speed
ABS-2
Axis
1,
Axis
2,
ABS
Axis
1,
Axis
2,
Center 1,
Center 2,
ABS-2
Axis
1,
Axis
2,
Speed
ABS-2
Axis
1,
Axis
2,
CPEND
[G20]
10000PLS/s
Set P1
20000PLS
10000PLS
Set P2
30000PLS
20000PLS
30000PLS
10000PLS
Set P3
40000PLS
25000PLS
15000PLS/s
Speed change
Set P4
50000PLS
40000PLS
Wait until PX000 turn off after constant-speed control
completion.
!PX000
END
(Note): Example of the above Motion SFC program is started using the automatic start or PLC program.
6 - 133
6 POSITIONING CONTROL
6.17.3 1 axis constant-speed control
Items set using MT Developer
Start
CPSTART1
End
CPEND
Pass point
Speed
change
WAIT-ON/OFF
FIN acceleration/deceleration
Skip
Commanded speed (Constant)
Cancel
S-curve ratio
Deceleration processing on stop input
Others
Allowable error range for circular interpolation
Deceleration time
Speed limit value
Acceleration time
Central point
Control unit
Radius
Auxiliary point
Torque limit value
M-code
Command speed
Dwell time
Address/travel value
Torque limit value
Parameter block
Number of
control axes
Axis
Positioning
method
Parameter block No.
Servo
instruction
Arc
Rapid stop deceleration time
Common
1
Valid
ABS-1
Absolute data
1
INC-1
Incremental
1
: Must be set
: Set if required
[Control details]
Start and end for 1 axis constant-speed control
1 axis constant-speed control is started and ended by the following instructions:
(1) CPSTART1
Starts the 1 axis constant-speed control. Sets the axis No. and command speed.
(2) CPEND
Ends the 1 axis constant-speed control for CPSTART1.
Positioning control method to the pass point
The positioning control to change control is specified by the following instructions:
(1) ABS-1/INC-1
Sets the 1 axis linear positioning control.
Refer to Section 6.2 "1 Axis Linear Positioning Control" for details.
6 - 134
6 POSITIONING CONTROL
[Program]
Program for repetition 1 axis constant-speed control is shown as the following
conditions.
(1) System configuration
Axis 4 constant-speed control.
Motion CPU control module
Q61P Q03UD Q172D QX41
CPU
CPU
QY41 Q172D
LX
Positioning start command (PX000)
AMP
Axis
1 M
AMP
AMP
Axis
2 M
Axis
3 M
AMP
Axis
4 M
(2) Positioning conditions
(a) Constant-speed control conditions are shown below.
Item
Setting
Servo program No.
500
Control axis
Axis 4
Positioning speed
10000
Number of repetitions
100
P1
-1000
Pass point
P2
2000
travel value
P3
-2000
P4
1000
(b) Constant-speed control start command ........ PX000 Leading edge
(OFF ON)
(3) Details of positioning operation
Number of repetitions
Return
100
Out
Return
3
Out
Return
2
Out
Return
1
Out
-1000
0
6 - 135
1000
Address
6 POSITIONING CONTROL
(4) Operation timing
Operation timing for servo program No.500 is shown below.
V
P1
P2
P3
P2
P3
P4
10000
t
0
-10000
PLC ready flag (M2000)
All axes servo ON command
(M2042)
All axes servo ON accept flag
(M2049)
Axis 4 servo ready (M2475)
Start command (PX000)
Servo program start
Axis 4 start accept flag (M2004)
(5) Servo program
Servo program No.500 for constant-speed control is shown below.
<K 500>
CPSTART1
Axis
4
Speed
INC-1
Axis
4,
FOR-TIMES
Starts constant-speed control
Axis used . . . . . . . . . . Axis 4
100000
-1000
Travel value to pass point . . . -1000
K 100
INC-1
Axis
INC-1
Axis
NEXT
INC-1
Axis
CPEND
Positioning speed . . . 10000
1 axis linear positioning control
Axis used . . . . . . . . . . . . . . . Axis 4
4,
2000
Number of repetitions 100
1 axis linear positioning control
Axis used . . . . . . . . . . . . . . . Axis 4
4,
-2000
Travel value to pass point . . . 2000
1 axis linear positioning control
Axis used . . . . . . . . . . . . . . . Axis 4
4,
1000
Travel value to pass point . . . -2000
Ends repetition region
1 axis linear positioning control
Axis used . . . . . . . . . . . . . . . Axis 4
Travel value to pass point . . .1000
End constant-speed control
(Note): Example of the Motion SFC program for positioning control is shown next page.
6 - 136
6 POSITIONING CONTROL
(6) Motion SFC program
Motion SFC program for which executes the servo program is shown below.
1 axis constant-speed control
1 axis constant-speed control
[F10]
[G10]
SET M2042
Turn on all axes servo ON command.
PX000*M2475
Wait until PX000 and Axis 4 servo ready turn on.
[K500] CPSTART1
Axis
4
Speed
10000PLS/s
INC-1
Axis
4, -1000PLS
FOR-TIMES
K 100
INC-1
Axis
4, 2000PLS
INC-1
Axis
NEXT
4,
-2000PLS
Start constant-speed control
Axis used . . . Axis 4
Positioning speed . . . . . . . . . . 10000[PLS/s]
1 axis linear positioning control
Axis used . . . . . . . . . . . . . . . Axis 4
Travel value to pass point . . . -1000[PLS/s]
Number of repetitions 100
1 axis linear positioning control
Axis used . . . . . . . . . . . . . . . Axis 4
Travel value to pass point . . . 2000[PLS/s]
1 axis linear positioning control
Axis used . . . . . . . . . . . . . . . Axis 4
Travel value to pass point . . . -2000[PLS/s]
End repetition region
INC-1
Axis
CPEND
[G20]
4,
1000PLS
1 axis linear positioning control
Axis used . . . . . . . . . . . . . . . Axis 4
Travel value to pass point . . . 1000[PLS/s]
End constant-speed control
Wait until PX000 turn off after constant-speed
control completion.
!PX000
END
(Note): Example of the above Motion SFC program is started using the automatic start or PLC program.
6 - 137
6 POSITIONING CONTROL
6.17.4 2 to 4 axes constant-speed control
Constant-speed control for 2 to 4 axes.
Items set using MT Developer
Start
End
CPSTART2
2
CPSTART3
3
CPSTART4
4
Speed
change
WAIT-ON/OFF
FIN acceleration/deceleration
Skip
Commanded speed (Constant)
Cancel
S-curve ratio
Deceleration processing on stop input
Others
Allowable error range for circular interpolation
Deceleration time
Speed limit value
Acceleration time
Central point
Control unit
Radius
Auxiliary point
Torque limit value
M-code
Command speed
Dwell time
Address/travel value
Torque limit value
Parameter block
Number of
control axes
Axis
Positioning
method
Parameter block No.
Servo
instruction
Arc
Rapid stop deceleration time
Common
CPEND
ABS-2
2
ABS-3
3
ABS-4
4
ABS
ABS
ABS
Absolute data
ABS
2
ABS
Valid
ABS
Pass
point
ABS
INC-2
2
INC-3
3
INC-4
4
INC
INC
INC
INC
Incremental
data
2
INC
INC
INC
: Must be set
: Set if required
6 - 138
6 POSITIONING CONTROL
[Control details]
Start and end for 2 to 4 axes constant-speed control
2 to 4 axes constant-speed control is started and ended using the following
instructions:
(1) CPSTART2
Starts the 2 axes constant-speed control.
Sets the axis No. and command speed.
(2) CPSTART3
Starts the 3 axes constant-speed control.
Sets the axis No. and command speed.
(3) CPSTART4
Starts the 4 axes constant-speed control.
Sets the axis No. and command speed.
(4) CPEND
Ends the 2, 3, or 4 axes constant-speed control for CPSTART2, CPSTART3, or
CPSTART4.
Positioning control method to the pass point
Positioning control to change control is specified using the following instructions:
(1) ABS-2/INC-2
Sets 2 axes linear interpolation control.
Refer to Section 6.3 "2 Axes Linear Interpolation Control" for details.
(2) ABS-3/INC-3
Sets 3 axes linear interpolation control.
Refer to Section 6.4 "3 Axes Linear Interpolation Control" for details.
(3) ABS-4/INC-4
Sets 4 axes linear interpolation control.
Refer to Section 6.5 "4 Axes Linear Interpolation Control" for details.
(4) ABS/INC
Sets circular interpolation control using auxiliary point specification.
Refer to Section 6.6 "Auxiliary Point-Specified Circular Interpolation Control" for
details.
(5) ABS/INC
, ABS/INC
, ABS/INC
, ABS/INC
Sets circular interpolation control using radius specification.
Refer to Section 6.7 "Radius-Specified Circular Interpolation Control" for details.
6 - 139
6 POSITIONING CONTROL
(6) ABS/INC
, ABS/INC
Sets circular interpolation control using center point specification.
Refer to Section 6.8 "Central Point-Specified Circular Interpolation Control" for
details.
[Program]
(1) Program for 2 axes constant-speed control is shown as the following conditions.
(a) System configuration
Constant-speed control for Axis 2 and Axis 3.
Motion CPU control module
Q61P Q03UD Q172D QX41
CPU
CPU
QY41 Q172D
LX
Start command (PX000)
AMP
Axis
1 M
AMP
Axis
2 M
AMP
Axis
3 M
AMP
Axis
4 M
(b) Positioning operation details
Axis 2 and axis 3 servomotors is used for positioning operation.
Positioning details for Axis 2 and Axis 3 servomotors are shown below.
Axis 3 positioning direction
P3
100000
P2
50000
30000
0
P1
30000 50000
90000
Axis 2 positioning
direction
Fig.6.30 Positioning for Axis 2 and Axis 3
6 - 140
6 POSITIONING CONTROL
(c) Positioning conditions
1) Constant-speed control conditions are shown below.
Item
Setting
Servo program No.
505
Positioning speed
10000
2 axes linear
Positioning method
Pass point
interpolation
Radius-specified
circular
interpolation
2 axes linear
interpolation
Axis 2
30000
50000
90000
Axis 3
30000
50000
100000
2) Constant-speed control start command ... PX000 Leading edge
(OFF ON)
(d) Servo program
Servo program No.505 for constant-speed control is shown below.
<K 505>
CPSTART2
Axis
2
Axis
3
Speed
ABS-2
Axis
2,
Axis
3,
ABS
Axis
2,
Axis
3,
Radius
ABS-2
Axis
2,
Axis
3,
CPEND
10000
Start constant-speed control
Axis used . . . . . . . . Axis 2, Axis 3
Positioning speed . . . . . . . . . . . 10000
2 axes linear interpolation control
30000
30000
Axis 2 . . . 30000
Axis 3 . . . 30000
Circular interpolation control
50000
50000
20000
Axis 2 . . . 50000
Axis 3 . . . 50000
Radius . . . . . . . . . . . . . . . . . . . . 20000
2 axes linear interpolation control
Positioning address Axis 2 . . . 90000
Axis 3 . . . 100000
90000
100000
Positioning address
Positioning address
End constant-speed control
(Note): Example of the Motion SFC program for positioning control is shown next page.
6 - 141
6 POSITIONING CONTROL
(e) Motion SFC program
Motion SFC program for which executes the servo program is shown below.
2 axes constant-speed control
2 axes constant-speed control
[F10]
[G10]
SET M2042
Turn on all axes servo ON command.
PX000*M2435*M2455
Wait until PX000, Axis 2 servo ready and Axis 3
servo ready turn on.
[K505] CPSTART2
Axis 2
Axis 3
Speed
10000PLS/s
ABS-2
Axis
2, 30000PLS
Axis
3, 30000PLS
ABS
Axis
2, 50000PLS
Axis
3, 50000PLS
Radius
20000PLS
ABS-2
Axis
2, 90000PLS
Axis
3, 100000PLS
CPEND
[G20]
Start constant-speed control
Axis used . . . Axis 2, Axis 3
Positioning speed . . . . . . . . . . 10000[PLS/s]
2 axes linear interpolation control
Axis 2 . . . 30000[PLS]
Axis 3 . . . 30000[PLS]
Circular interpolation control
Positioning address
Axis 2 . . . 50000[PLS]
Axis 3 . . . 50000[PLS]
Radius . . . 20000[PLS]
2 axes linear interpolation control
Positioning address
Axis 2 . . . 90000[PLS]
Axis 3 . . 100000[PLS]
End constant-speed control
Positioning address
Wait until PX000 turn off after constant-speed control
completion.
!PX000
END
(Note): Example of the above Motion SFC program is started using the automatic start or PLC program.
(2) Program for 4 axes constant-speed control is shown as the following conditions.
(a) System configuration
Constant-speed control for Axis 1, Axis 2, Axis 3, and Axis 4.
Motion CPU control module
Q61P Q03UD Q172D QX41
CPU
CPU
QY41 Q172D
LX
Start command (PX000)
AMP
Axis
1 M
AMP
Axis
2 M
6 - 142
AMP
Axis
3 M
AMP
Axis
4 M
6 POSITIONING CONTROL
(b) Positioning conditions
1) Constant-speed control conditions are shown below.
Item
Setting
Servo program No.
506
Positioning speed
10000
Positioning method
Pass point
4 axes linear
4 axes linear
4 axes linear
interpolation
interpolation
interpolation
Axis 1
3000
5000
5000
Axis 2
4000
3500
3500
Axis 3
4000
-4000
3000
Axis 4
4000
-6000
6000
2) Constant-speed control start command... PX000 Leading edge
(OFF ON)
(c) Servo program
Servo program No.506 for constant-speed control is shown below.
<K 506>
CPSTART4
Axis
Axis
Axis
Axis
Speed
INC-4
Axis
Axis
Axis
Axis
INC-4
Axis
Axis
Axis
Axis
INC-4
Axis
Axis
Axis
Axis
Constant-speed control
Axis used . . . Axis 1, Axis 2, Axis 3, Axis 4
1
2
3
4
10000
1,
2,
3,
4,
3000
4000
4000
4000
1,
2,
3,
4,
5000
3500
-4000
-6000
1,
2,
3,
4,
5000
3500
3000
6000
CPEND
Positioning speed . . . 10000
4 axes linear interpolation control (P1)
Axis 1 . . . 3000
Travel value to pass point Axis 2 . . . 4000
Axis 3 . . . 4000
Axis 4 . . . 4000
4 axes linear interpolation control (P2)
Axis 1 . . . 5000
Axis 2 . . . 3500
Travel value to pass point
Axis 3 . . . -4000
Axis 4 . . . -6000
4 axes linear interpolation control (P3)
Axis 1 . . . 5000
Travel value to pass point Axis 2 . . . 3500
Axis 3 . . . 3000
Axis 4 . . . 6000
End constant-speed control
(Note): Example of the Motion SFC program for positioning control is shown next page.
6 - 143
6 POSITIONING CONTROL
(d) Motion SFC program
Motion SFC program for which executes the servo program is shown below.
4 axes constant speed control
4 axes constant speed control
[F10]
SET M2042
Turn on all axes servo ON command.
[G10]
PX000*M2415*M2435*M2455
*M2475
Wait until PX000, Axis 1 servo ready, Axis 2 servo
ready, Axis 3 servo ready and Axis 4 servo ready
turn on.
[K506]
CPSTART4
Axis 1
Axis 2
Axis 3
Axis 4
Speed
10000PLS/s
INC-4
Axis 1, 3000PLS
Axis 2, 4000PLS
Axis 3, 4000PLS
Axis 4, 4000PLS
INC-4
Axis 1, 5000PLS
Axis 2, 3500PLS
Axis 3, -4000PLS
Axis 4, -6000PLS
INC-4
Axis 1, 5000PLS
Axis 2, 3500PLS
Axis 3, 3000PLS
Axis 4, 6000PLS
CPEND
Start constant-speed control
Axis used. . . Axis 1, Axis 2, Axis 3, Axis 4
[G20]
Positioning speed . . . . . . . . . . 10000[PLS/s]
4 axes linear interpolation control (P1)
Travel value to pass point
Axis 1 . . .
Axis 2 . . .
Axis 3 . . .
Axis 4 . . .
3000PLS
4000PLS
4000PLS
4000PLS
4 axes linear interpolation control (P2)
Travel value to pass point
Axis 1 . . . 5000PLS
Axis 2 . . . 3500PLS
Axis 3 . . . -4000PLS
Axis 4 . . . -6000PLS
4 axes linear interpolation control (P3)
Travel value to pass point
Axis 1 . . .
Axis 2 . . .
Axis 3 . . .
Axis 4 . . .
5000PLS
3500PLS
3000PLS
6000PLS
End constant-speed control
Wait until PX000 turn off after constant-speed
control completion.
!PX000
END
(Note): Example of the above Motion SFC program is started using the automatic start or PLC program.
6 - 144
6 POSITIONING CONTROL
6.17.5 Constant speed control for helical interpolation
The helical interpolation can be specified as the positioning control method to pass
point for 3 or 4 axes constant-speed control.
Starting or ending instruction for constant-speed control uses the same CPSTART3,
CPSTART4 or CPEND as 3 or 4 axes constant-speed control instruction.
Items set using MT Developer
Speed
change
WAIT-ON/OFF
FIN acceleration/deceleration
Skip
Commanded speed (Constant)
Cancel
S-curve ratio
Others
Allowable error range for circular interpolation
Torque limit value
Deceleration time
Speed limit value
Acceleration time
Control unit
Central point
Pitch
Radius
Auxiliary point
Torque limit value
Command speed
M-code
Address/travel value
Deceleration processing on stop input
Parameter block
Number of
control axes
Axis
Positioning
method
Parameter block No.
Servo
instruction
Arc/Helical
Rapid stop deceleration time
Common
ABH
ABH
ABH
ABH
Absolute
ABH
ABH
ABH
Valid
2
INH
INH
INH
INH
Incremental
INH
INH
INH
: Must be set
: Set if required
6 - 145
6 POSITIONING CONTROL
Helical interpolation specified methods for constant-speed control are shown below.
Servo instruction
Positioning method
Circular interpolation specified method
ABH
Absolute
Radius-specified method
INH
Incremental
less than CW180°
ABH
Absolute
Radius-specified method
INH
Incremental
less than CCW180°
ABH
Absolute
Radius-specified method
INH
Incremental
CW180° or more.
ABH
Absolute
Radius-specified method
INH
Incremental
CCW180° or more.
ABH
Absolute
INH
Incremental
ABH
Absolute
INH
Incremental
ABH
Absolute
INH
Incremental
Central point-specified method CW
Central point-specified method CCW
Auxiliary point-specified method
[Program]
(1) Servo program
Servo program for which helical interpolation specified pass point for constantspeed control is shown below.
<K 510>
CPSTART4
Axis
Axis
Axis
Speed
ABS-3
Axis
Axis
Axis
10000
1,
2,
3,
ABH
Axis
1,
Axis
2,
Linear axis 3,
Number of pitches
Radius
ABS-3
Axis
Axis
Axis
CPEND
Constant-speed control
Axis used . . . Axis 1, Axis 2, Axis 3, Axis 4
1
2
3
1,
2,
3,
3000
4000
4000
5000
3500
-4000
-6000
1000
5000
3500
3000
Positioning speed . . . 10000
3 axes linear interpolation control (P1)
Axis 1 . . . 3000
Positioning address Axis 2 . . . 4000
Axis 3 . . . 4000
3 axes helical interpolation control (P2)
Axis 1 . . . . . . . . . . . 5000
Axis 2 . . . . . . . . . . . 3500
Positioning address Axis 3 . . . . . . . . . . -4000
Number of pitches . -6000
Radius . . . . . . . . . . . 1000
3 axes linear interpolation control (P3)
Axis 1 . . . 5000
Positioning address Axis 2 . . . 3500
Axis 3 . . . 3000
End constant-speed control
Control with the following speed.
For linear/circular interpolation: Vector speed for number of
interpolation axes.
For helical interpolation: 2 axes vector speed for circular interpolation.
6 - 146
6 POSITIONING CONTROL
[Cautions]
(1) The helical interpolation specification at pass point for constant-speed control can
be used in the both of real mode/virtual mode.
(2) Specify any 3 axes among 4 controlled axes in the helical interpolation control at
the pass point for 4 axes constant-speed control (CPSTART4).
(3) Command speed at the helical interpolation specified point is controlled with the
speed of circumference.
Control is the same as before at the point except for the helical interpolation
specification.
(Both of the linear interpolation-specified point and circular interpolation-specified
point are the vector speed for number of interpolation axes.)
(4) Skip function toward the helical interpolation-specified each point for constantspeed control is possible. If the absolute-specified helical interpolation is specified
to point since the skip signal specified point, set the absolute linear interpolation
between them. If it does not set, it may occur an error and stop.
(5) FIN signal wait function toward the helical interpolation specified each pass point
for constant-speed control is possible. M-code outputting signal is outputted to all
circular interpolation axes and linear axes. Fin signal can be operated with the
both of circular interpolation axes and linear axes.
(6) If negative speed change toward the helical interpolation-specified each pass
point for constant-speed control is executed, it can be returned before 1 point
during positioning control.
(7) Speed-switching point-specified flag is effective toward the helical interpolationspecified each pass point for constant-speed control.
,
6 - 147
6 POSITIONING CONTROL
6.17.6 Pass point skip function
This function stops positioning to executing point and executes positioning to next
point, by setting a skip signal toward each pass point for constant-speed control.
[Data setting]
(1) Skip signal devices
The following devices can be specified as skip signal devices.
X, Y, M, B, F, U \G
[Cautions]
(1) When an absolute circular interpolation or absolute helical interpolation is
specified to since point since the skip signal specified point, set the absolute linear
interpolation between them.
If it does not set, it may occur an error and stop.
(2) If a skip signal is inputted at the end point, a deceleration stop occurs at that point
and the program is ended.
[Program]
<K 0>
CPSTART2
Axis
1
Axis
2
Speed
ABS-2
Axis
1,
Axis
2,
Speed
Skip
ABS-2
Axis
1,
Axis
2,
Speed
CPEND
V
Point 1
Skip
positioning
processing
No skip
10000
100000
200000
10000
M200
200000
200000
15000
Skip signal
Servo program
start
Start accept
Skip signal
(M200)
6 - 148
t
6 POSITIONING CONTROL
CAUTION
When a skip is specified during constant-speed control and the axis which has no stroke range
[degree] is included, the operation at the execution of skip is described.
(Note-1): If there is an ABS instruction after the skip in these conditions, the end positioning
point and the travel distance in the program as a whole will be the same regardless
of whether the skip is executed or not.
(1) All instructions after the skip are INC instructions:
Program example
CPSTART1
Axis
Speed
INC-1
Axis
Skip
INC-1
Axis
INC-1
Axis
CPEND
When skip is not executed
180
0
1
0
270[degree]
10.000
1,
180.00000
M100
When skip is executed
1,
180.00000
0
1,
270.00000
100
280
190[degree]
When the skip occurs at 100 [degree]
(2) Instruction immediately after the skip is ABS instruction:
Program example
CPSTART1
Axis
Speed
INC-1
Axis
Skip
ABS-1
Axis
INC-1
Axis
CPEND
When skip is not executed
180
0
1
350
260[degree]
10.000
1,
180.00000
M100
1,
350.00000
1,
270.00000
When skip is executed
(The end positioning point is same regardless of whether the skip is
executed or not.)
0
100
350
260[degree]
When the skip occurs at 100 [degree]
(3) Instruction immediately after the skip is INC instruction and there is ABS instruction after
that:
Program example
CPSTART1
Axis
Speed
INC-1
Axis
Skip
INC-1
Axis
INC-1
Axis
ABS-1
Axis
CPEND
When skip is not executed
0
1
0
180
0
90[degree]
10.000
1,
360.00000
M100
1,
180.00000
1,
1,
180.00000
When skip is executed
(The end positioning point is same regardless of whether the skip is
executed or not.)
90[degree]
0 80
260
80
When the skip occurs
at 80 [degree]
90.00000
6 - 149
This point moves at 370 [degree],
not 10 [degree].
6 POSITIONING CONTROL
6.17.7 FIN signal wait function
By selecting the FIN signal wait function and setting a M-code at each executing point,
a process end of each executing point is synchronized with the FIN signal, the FIN
signal turns ON to OFF and then the next positioning is executed.
Turn the FIN signal on/off using the Motion SFC program or PLC program.
[Data setting]
(1) When the FIN signal wait function is selected, the fixed acceleration/deceleration
time method is used. Set the acceleration/deceleration time within the range of 1
to 5000 [ms] by "FIN acceleration/deceleration" (selecting item) in the servo
program.
Indirect setting is also possible by the word devices (1 word).
[Cautions]
(1) If the acceleration/deceleration time is specified outside the setting range, the
servo program setting error [13] will occur at the start and it is controlled with the
acceleration/deceleration time of 1000[ms].
(2) M-code outputting signal is output to all interpolation axes at the interpolation
control. In this case, turn on the signal for one of the interpolation axes.
(3) When M-code is set at the end point, positioning ends after the FIN signal has turn
OFF to ON to OFF.
[Operation]
Servo program K0 for FIN signal wait function is shown below.
<K 0>
CPSTART2
Axis
1
Axis
2
Speed
FIN acceleration/
deceleration
ABS-2
Axis
1,
Axis
2,
M code
ABS-2
Axis
1,
Axis
2,
M code
ABS-2
Axis
1,
Axis
2,
M code
ABS-2
Axis
1,
Axis
2,
CPEND
Vector speed
Point
10000
100
300000
250000
11
350000
300000
12
400000
400000
WAIT
1
2
[ms]
M-code
200000
200000
10
100[ms]
10
11
M-code outputting
FIN signal
Explanatory
1. When the positioning of point 1 starts, M-code 10 is output and
M-code outputting signal turns on.
2. FIN signal turns on after performing required processing in the
Motion SFC program.
Transition to the next point does not execute until the FIN signal
turns on.
3. When the FIN signal turns on, M-code outputting signal turns off.
4. When the FIN signal turns off after the M-code outputting signal
turns off, the positioning to the next point 2 starts.
6 - 150
6 POSITIONING CONTROL
[Program example]
(1) FIN signal wait function by the PLC program
(a) System configuration
FIN signal wait function toward constant-speed control for Axis 1 and Axis 2.
PLC CPU control module
Q61P Q03UD Q172D QX41
CPU
CPU
QY41
Positioning start command : X0
(PLC CPU device)
AMP
Axis
1 M
AMP
Axis
2 M
AMP
Axis
3 M
AMP
Axis
4 M
(b) Positioning conditions
1) Constant-speed control conditions are shown below.
Item
Setting
Servo program No.
0
Positioning speed
10000
FIN
100[ms]
acceleration/deceleration time
Positioning method
Pass point
2 axes linear interpolation control
Axis 1
200000
300000
350000
400000
Axis 2
200000
250000
300000
400000
10
11
12
M-code
2) Constant-speed control start command
..............................................................X0 Leading edge (OFF
(PLC CPU device)
6 - 151
ON)
6 POSITIONING CONTROL
(c) Servo program
Servo program No.0 for constant-speed control is shown below.
<K 0>
CPSTART2
Axis
1
Axis
2
Speed
10000
100
FIN acceleration/
deceleration
ABS-2
Axis
1,
200000
Axis
2,
200000
M-code
10
ABS-2
Axis
Axis
M-code
1,
2,
300000
250000
11
ABS-2
Axis
Axis
M-code
1,
2,
350000
300000
12
ABS-2
Axis
Axis
CPEND
1,
2,
400000
400000
Start constant-speed control
Axis used . . . . . . . . . Axis 1, Axis 2
Positioning speed . . . 10000[PLS/s]
FIN acceleration/ . . . . . 100[ms]
deceleration
2 axes linear interpolation control
Axis used . . . . . . Axis 1, Axis 2
Address of . . . . . Axis 1 . . . 200000[PLS]
Axis 2 . . . 200000[PLS]
stop position
M-code output . . . . . . 10
2 axes linear interpolation control
Axis used . . . . . . Axis 1, Axis 2
Address of . . . . . Axis 1 . . . 300000[PLS]
Axis 2 . . . 250000[PLS]
stop position
M-code output . . . . . . 11
2 axes linear interpolation control
Axis used . . . . . . Axis 1, Axis 2
Address of . . . . . Axis 1 . . . 350000[PLS]
stop position
Axis 2 . . . 300000[PLS]
M-code output . . . . . . 12
2 axes linear interpolation control
Axis used . . . . . . Axis 1, Axis 2
Address of . . . . . Axis 1 . . . 400000[PLS]
Axis 2 . . . 400000[PLS]
stop position
End constant-speed control
(d) Motion SFC program
Motion SFC program for constant-speed control is shown below.
Constant-speed control
[F10]
SET M2042
Turn on all axes servo ON command.
[G10]
M2415*M2435
Wait until Axis 1 servo ready and Axis 2 servo
ready turn on.
[K0]
CPSTART2
Axis
1
Axis
2
Speed
FIN acceleration/
deceleration
10000
100
ABS-2
Axis
Axis
M-code
1,
2,
200000
200000
10
ABS-2
Axis
Axis
M-code
1,
2,
300000
250000
11
ABS-2
Axis
Axis
M-code
1,
2,
350000
300000
12
ABS-2
Axis
Axis
CPEND
1,
2,
400000
400000
END
Start constant-speed control
Axis used . . . . . . . . . Axis 1, Axis 2
Positioning speed . . . 10000[PLS/s]
FIN acceleration/ . . . . . 100[ms]
deceleration
2 axes linear interpolation control
Axis used . . . . . Axis 1, Axis 2
Address of . . . . . Axis 1 . . . 200000[PLS]
Axis 2 . . . 200000[PLS]
stop position
M-code output . . . . . 10
2 axes linear interpolation control
Axis used . . . . . Axis 1, Axis 2
Address of . . . . . Axis 1 . . . 300000[PLS]
Axis 2 . . . 250000[PLS]
stop position
M-code output . . . . . 11
2 axes linear interpolation control
Axis used . . . . . Axis 1, Axis 2
Address of . . . . . Axis 1 . . . 350000[PLS]
Axis 2 . . . 300000[PLS]
stop position
M-code output . . . . . 12
2 axes linear interpolation control
Axis used . . . . . Axis 1, Axis 2
Address of . . . . . Axis 1 . . . 400000[PLS]
Axis 2 . . . 400000[PLS]
stop position
End constant-speed control
(Note): Example of the above Motion SFC program is started using the automatic start or PLC program.
6 - 152
6 POSITIONING CONTROL
(e) PLC program
PLC program for FIN signal wait function is shown below.
PLC program
0
11
14
26
X0
DP.SFCS H3E1
M0
K110
M0
MOVP
K1
M2419
28
D50
D13
D1
Motion SFC program start request
SET
Substitutes 1 for D51 after program
start.
Reads data of D13 for Multiple CPU
system No.2 by turning M2419 on,
M2
and stores in the data area D1 of
self CPU
M3219 M3219 is set
RST
M3219 Resets M3219 by turning M2419 off.
M2419
DP.DDRD H3E1
D0
D51
END
(Note): Details of D1 is used as control.
(Note): The automatic refresh setting example for FIN signal wait function is shown next page.
6 - 153
6 POSITIONING CONTROL
(f) Parameter setting
The automatic refresh setting example for FIN signal wait function is shown
below.
• CPU No. 1 (PLC CPU) (GX Developer)
Set the device transmitted to CPU No.2 (M3200 to M3295)
• CPU No. 2 (Motion CPU) (MT Developer)
Set the device received from CPU No.1 (M3200 to M3295)
Set the device received from CPU No.2 (M2400 to M2495)
Set the device transmitted to CPU No.1 (M2400 to M2495)
Multiple CPU high speed refresh setting (MT Developer only)
6 - 154
6 POSITIONING CONTROL
POINT
Set the following operation for automatic refresh setting using GX Developer.
1) Select tab "Multiple CPU high speed communication area setting".
2) Set "Use multiple CPU high speed communication".
1)
2)
(2) FIN signal wait function using the Motion SFC program
(a) System configuration
FIN signal wait function toward constant-speed control for Axis 1 and Axis 2.
Motion CPU control module
Q61P Q03UD Q172D QX41
CPU
CPU
PX000
to
PX00F
AMP
Axis
1 M
QY41
QY41
PX010
to
PX01F
PX020
to
PX02F
AMP
Axis
2 M
AMP
Axis
3 M
AMP
Axis
4 M
(b) Positioning conditions
1) Constant-speed control conditions are shown below.
Item
Setting
Servo program No.
0
Positioning speed
10000
FIN
100[ms]
acceleration/deceleration time
Positioning method
Pass point
2 axes linear interpolation control
Axis 1
200000
300000
350000
400000
Axis 2
200000
250000
300000
400000
10
11
12
M-code
2) Constant-speed control start command ... PX000 Leading edge
(OFF ON)
6 - 155
6 POSITIONING CONTROL
(c) Servo program
Servo program No.0 for constant speed control is shown below.
<K 0>
CPSTART2
Axis
1
Axis
2
Speed
10000
100
FIN acceleration/
deceleration
ABS-2
Axis
1,
200000
Axis
2,
200000
M-code
10
ABS-2
Axis
Axis
M-code
1,
2,
300000
250000
11
ABS-2
Axis
Axis
M-code
1,
2,
350000
300000
12
ABS-2
Axis
Axis
CPEND
1,
2,
400000
400000
Start constant-speed control
Axis used . . . . . . . . . Axis 1, Axis 2
Positioning speed . . . 10000[PLS/s]
FIN acceleration/ . . . . . 100[ms]
deceleration
2 axes linear interpolation control
Axis used . . . . . . Axis 1, Axis 2
Address of . . . . . Axis 1 . . . 200000[PLS]
Axis 2 . . . 200000[PLS]
stop position
M-code output . . . . . . 10
2 axes linear interpolation control
Axis used . . . . . . Axis 1, Axis 2
Address of . . . . . Axis 1 . . . 300000[PLS]
Axis 2 . . . 250000[PLS]
stop position
M-code output . . . . . . 11
2 axes linear interpolation control
Axis used . . . . . . Axis 1, Axis 2
Address of . . . . . Axis 1 . . . 350000[PLS]
Axis 2 . . . 300000[PLS]
stop position
M-code output . . . . . . 12
2 axes linear interpolation control
Axis used . . . . . . Axis 1, Axis 2
Address of
Axis 1 . . . 400000[PLS]
stop position
Axis 2 . . . 400000[PLS]
End constant- speed control
(Note): Example of the Motion SFC program for positioning control is shown next page.
6 - 156
6 POSITIONING CONTROL
(d) Motion SFC program
1) Motion SFC program for constant-speed control is shown below.
Constant-speed control
[F10]
SET M2042
Turn on all axes servo ON command.
[G10] PX000*M2415*M2435
Wait until PX000, Axis 1 servo ready and Axis 2
servo ready turn on.
[K0]
Start constant-speed control
Axis used . . . . . . . . . . Axis 1, Axis 2
Positioning speed . . . 10000[PLS/s]
FIN acceleration/ . . . . . 100[ms]
deceleration
2 axes linear interpolation control
Axis used . . . . . . Axis 1, Axis 2
Address of . . . . . Axis 1 . . . 200000[PLS]
Axis 2 . . . 200000[PLS]
stop position
M-code output . . . . . 10
2 axes linear interpolation control
Axis used . . . . . . Axis 1, Axis 2
Address of . . . . . Axis 1 . . . 300000[PLS]
Axis 2 . . . 250000[PLS]
stop position
M-code output . . . . . 11
2 axes linear interpolation control
Axis used . . . . . . Axis 1, Axis 2
Address of . . . . . Axis 1 . . . 350000[PLS]
stop position
Axis 2 . . . 300000[PLS]
M-code output . . . . . 12
2 axes linear interpolation control
Axis used . . . . . . Axis 1, Axis 2
Address of . . . . . Axis 1 . . . 400000[PLS]
stop position
Axis 2 . . . 400000[PLS]
End constant-speed control
CPSTART2
Axis
1
Axis
2
Speed
FIN acceleration/
deceleration
10000
100
ABS-2
Axis
Axis
M-code
1,
2,
200000
200000
10
ABS-2
Axis
Axis
M-code
1,
2,
300000
250000
11
ABS-2
Axis
Axis
M-code
1,
2,
350000
300000
12
ABS-2
Axis
Axis
CPEND
1,
2,
400000
400000
Stand by FIN signal
END
(Note): Example of the above Motion SFC program is started using the automatic start or PLC program.
6 - 157
6 POSITIONING CONTROL
2) Motion SFC program which outputs M-code of each point for constantspeed control to PY20 to PY2F by BCD code is shown below.
FIN signal wait
(Note): Details of #0 is used as control.
FIN signal wait
P0
[G10]
[F10]
M2419*M2439
Turn on Axis 1, Axis 2 M-code outputting signal.
#0=BCD(D13)
DOUT Y20,#0
SET M3219
Output Axis 1 M-code.
Turn on FIN signal.
[G20]
!M2419*!M2439*M2403*M2423
Turn off Axis 1, Axis 2 M-code outputting signal and
turn on Axis 1, Axis 2 command in-position signal.
[F20]
RST M3219
Turn off FIN signal.
[G30]
D13==K12
P0
END
6 - 158
Repeat until M-code value become 12.
6 POSITIONING CONTROL
POINTS
(1) The fixed acceleration/deceleration time method is acceleration/deceleration processing
that the time which acceleration/deceleration takes is fixed, even if the command speed
differs.
V
t
Acceleration/deceleration time is fixed
(a) The following processing and parameters are invalid in the fixed
acceleration/deceleration time method.
• Rapid stop acceleration/deceleration time in parameter block
• Completion point specification method for speed change point
• S-curve acceleration/deceleration
(b) The speed processing for each axis is as shown below in positioning operation
(constant-speed) as shown in the following figure.
Y
V
Ay
Axis 1
Axis 2
Address Ax
Axis 1
Ax
X
t
Ax
V
Positioning operation
Axis 2
Address Ay
Ay
t
Constant-speed control processing of each axis
(2) When the rapid stop command is executed by the setting "deceleration time < rapid stop
deceleration time" during constant-speed control, the point data currently executed in the
middle of deceleration, and the positioning may be completed suddenly as a speed "0".
In the case of, "deceleration time rapid stop deceleration time", the above operation is not
executed.
Travel value by the point data currently executed at the rapid stop command
(Up to 9 points) < speed at rapid stop command input rapid stop deceleration time/2
[Operation pattern]
Start accept flag
ON
OFF
ON
Positioning complete
signal
Rapid stop command
OFF
ON
OFF
1)
2)
Vector speed
Deceleration speed at
the normal stop
6 - 159
3)
4)
5)
6)
7)
8)
6 POSITIONING CONTROL
6.18 Position Follow-Up Control
Positioning to the address set in the word device of the Motion CPU specified with the
servo program at one start is executed.
Position follow-up control is started using the PFSTART servo program instruction.
Items set using MT Developer
Others
WAIT-ON/OFF
Cancel
Speed change
S-curve ratio
Allowable error range for circular interpolation
Torque limit value
Deceleration processing on stop input
Rapid stop deceleration time
Deceleration time
Speed limit value
Acceleration time
Central point
Parameter block
Control unit
Radius
Auxiliary point
Torque limit value
1
Arc
M-code
Absolute
Command speed
PFSTART
Dwell time
Number of
control axes
Address/travel value
Positioning
method
Parameter block No.
Servo
instruction
Axis
Common
Valid
: Must be set
: Set if required
[Control details]
Control using PFSTART instruction
(1) Positioning to the address set in the word device of the Motion CPU specified with
the servo program is executed.
(2) Position follow-up control is executed until the stop instruction is input.
If the word device value changes during operation, positioning is executed to the
changed address.
V
Positioning address has not
change using PFSTART instruction
t
Before reaching A, positioning address
changed to B (return direction)
Positioning address
A
B
6 - 160
6 POSITIONING CONTROL
[Cautions]
(1) Number of control axes is 1 axis.
(2) Only the absolute data method (ABS) is used for positioning control to the pass
points.
(3) The speed can be changed during the start.
The changed speed is effective until the stop command is input.
(4) Set the positioning address in the servo program using indirect setting with the
word devices.
(5) Use only even-numbered devices for indirect setting of positioning address in the
servo program.
If odd-numbered devices are used, an error [141] occurs at the start and control
does not start.
(6) Positioning speeds can be set in the servo program using indirect setting with the
word devices.
However, this data is effective only at the position follow-up control start (servo
program start) and the speed does not change if the indirect setting are changed
during the start.
[Program]
(1) System configuration
Axis 3 position follow-up control for PLC CPU (CPU No.1) to Motion CPU (CPU
No.2).
PLC CPU control module
Q61P Q03UD Q172D QX41
CPU
CPU
Positioning start command : X0
(PLC CPU device)
AMP
Axis
1 M
AMP
Axis
2 M
AMP
Axis
3 M
AMP
Axis
4 M
(2) Positioning conditions
(a) Position follow-up conditions are shown below.
Item
Servo program No.
Control axis
Positioning address
Positioning speed
Setting
100
Axis 3
D4000
20000
(b) Position follow-up control start command
.............................................................. X0 Leading edge (OFF
(PLC CPU device)
6 - 161
ON)
6 POSITIONING CONTROL
(3) Operation timing
Operation timing for position follow-up control is shown below.
V
t
0
Positioning address (D4000)
100
0
PLC ready flag (M2000)
All axes servo ON command
(M2042)
All axes servo ON accept flag
(M2049)
Axis 3 servo ready (M2455)
Start command (X0)
Servo program start
Axis 3 start accept flag
(M2003)
Axis 3 positioning start completion
(M2440)
Axis 3 positioning completion
(M2441)
Axis 3 command in-position
(M2443)
Stop command (X1)
Axis 3 stop command (M3240)
(4) Servo program
Servo program No.100 for position follow-up control is shown below.
<K 100>
PFSTART
Axis
Speed
3,
D 4000
20000
Position follow-up control
Axis used . . . . . . . . . . . Axis 3
Positioning address . . . D4000
Speed . . . . . . . . . . . . . 20000
(Note): Example of the Motion SFC program for positioning control is shown next page.
6 - 162
6 POSITIONING CONTROL
(5) Motion SFC program
Motion SFC program, PLC program and parameter setting for position follow-up
control is shown below.
(a) Motion SFC program
Motion SFC program example for position follow-up control is shown below.
This program is started using D(P).SFCS instruction from PLC CPU (CPU
No.1).
Position follow-up control
Position follow-up control
[F10]
[G10]
SET M2042
Turn on all axes servo ON command.
M2049*M2455
Wait until all axes servo ON accept flag and
Axis 3 servo ready turn on.
[K100] PFSTART
Axis
3,
Speed
[G20]
D4000
20000PLS/s
Position follow-up control
Axis used . . . . . . . . . . Axis 3
Positioning address . . . D4000
Positioning speed . . . . 2000[PLS/s]
Wait until Axis 3 start accept flag turn off after
position follow-up control completion.
!M2003
END
6 - 163
6 POSITIONING CONTROL
(b) PLC program
PLC program example for position follow-up control is shown below.
PLC program
0
3
12
16
SM400
MOVP
PLS
M10
42
M10
Starts by turning X0 on.
Substitute 150000 for D1000 .
DMOV K0
Substitute 0 for D1300 .
D1300
RST
M20
RST
M30
M0
M2
D0
H3E1
M3
D1000
D4000 M0
Reads data of D1000 of self CPU for
Multiple CPU system by turning M10 on,
and writes to D4000 of CPU No.2.
K150
M2
Starts the Motion SFC program No.150.
SET
D1100
M20
M20
DMOV D40
M2441
52
Substitute 2 for D1 after program
start.
M3240
DP.DDWR H3E1
M1
D1
DMOV K150000 D1000
X1
DP.SFCS
38
K2
X0
M30
M2442
D=
D1200 D1000
D1200
RST
M20
SET
M30
M4
DP.DDWR H3E1
D0
D1300 D4000 M4
RST
67
M30
Substitutes the value of D40 for D1200.
Resets M20 and sets M30 at the axis 3
positioning completion and D1200 =
D1000.
Reads data of D1300 of self CPU for
Multiple CPU system by turning M30 on,
and writes to D4000 of CPU No.2.
END
(Note): The automatic refresh setting example for position follow-up control is shown next page.
6 - 164
6 POSITIONING CONTROL
(c) Parameter setting
The automatic refresh setting example for position follow-up control is
shown below.
[Allocation example of devices allocated in the Motion dedicated device to the PLC CPU]
• CPU No. 1 (PLC CPU) (GX Developer)
Set the device transmitted to CPU No.2 (M3200 to M3295)
• CPU No. 2 (Motion CPU) (MT Developer)
Set the device received from CPU No.1 (M3200 to M3295)
Set the device received from CPU No.2
(M2400 to M2495, D40 to D59)
Set the device transmitted to CPU No.1
(M2400 to M2495, D40 to D59)
Multiple CPU high speed refresh setting (MT Developer only)
6 - 165
6 POSITIONING CONTROL
POINT
Set the following operation for automatic refresh setting using GX Developer.
1) Select tab "Multiple CPU high speed communication area setting".
2) Set "Use multiple CPU high speed communication".
1)
2)
6 - 166
6 POSITIONING CONTROL
6.19 Speed control with fixed position stop
Speed control with fixed position stop of the specified axis is executed.
Speed control with fixed position stop is started using the PVF (forward rotation) or
PVR (reverse rotation) of servo program instruction.
Items set using MT Developer
PVF
PVR
Absolute
Speed
change
Fixed position stop
Fixed position stop accel./decel.time
WAIT-ON/OFF
Cancel
S-curve ratio
Others
Allowable error range for circular interpolation
Torque limit value
Deceleration time
Speed limit value
Acceleration time
Central point
Control unit
Radius
Auxiliary point
Torque limit value
M-code
Command speed
Dwell time
Address/travel value
Deceleration processing on stop input
Parameter block
Number of
control axes
Axis
Positioning
method
Parameter block No.
Servo
instruction
Arc/Helical
Rapid stop deceleration time
Common
Valid
1
Valid
1
: Must be set
: Set if required
[Control details]
(1) After starting of servomotor, control at the specified speed is executed until the
fixed position stop command turns on.
• PVF...... Forward rotation direction (Address increase direction) start
• PVR...... Reverse rotation direction (Address decrease direction) start
(2) When the fixed position stop command turns on, a positioning control to the
specified address is executed.
[Positioning address :180.00000[degree]]
359.99999[degree]
Current value
0[degree]
Servo program
start
180.00000[degree]
ON
OFF
ON
Fixed position stop OFF
command device
(3) It can be controlled in the real mode only for axis which "control unit is [degree]
and stroke limit is invalid ("upper stroke limit value" equal to "lower stroke limit
value")". If it is started for axis which "control unit is except [degree] or stroke limit
is not invalid", a minor error [130] occurs and it does not start.
And, if it is started for the virtual servomotor axis in the virtual mode, a servo
program setting error [905] occurs and it does not start. (It can be started for real
mode axis.)
6 - 167
6 POSITIONING CONTROL
(4) Address setting range is 0 to 35999999 (0 to 359.99999[degree]) in the indirect
setting of positioning address. If it is set outside the setting range, a servo
program setting error [n03] occurs and it does not start. Positioning address is
input at the program start.
(5) It is controlled in the fixed position stop acceleration/deceleration time set in the
servo program at the time of positioning start, speed change request (CHGV) and
fixed position stop command ON. The fixed acceleration/deceleration time method
is used as an acceleration/deceleration processing in this case.
(6) The setting range of fixed position stop acceleration/deceleration time is 1 to
65536[ms].
(7) In the case of indirect setting, the fixed position stop acceleration/deceleration time
is input in the following timing.
• Positioning start
• Speed change request (CHGV)
• Fixed position stop command ON
(8) When the positioning to specified address completes, the positioning complete
signal (M2401+20n) turns on. It does not turn on at the time of stop by the stop
command (M3200+20n)/rapid stop command (M3201+20n). The positioning
complete signal (M2401+20n) turns off at leading edge of complete signal OFF
command (M3204+20n) or positioning start.
(9) Speed change can be executed any number of times by the speed change
request (CHGV) instruction during operation.
Change value by speed
change request (CHGV).
V
a
b
c
d
Fixed position
stop accel./decel.
time
ON
Servo program start
OFF
Speed change
request (CHGV)
OFF
Fixed position stop
command device
OFF
ON
Fixed position stop
accel./decel. time
(Indirect setting device)
t
ON
a
b
6 - 168
c
d
6 POSITIONING CONTROL
(10) Deceleration speed by the stop command (M3200+20n)/rapid stop command
(M3201+20n) is controlled with fixed inclination (deceleration speed).
Deceleration processing is executed using the speed limit value or deceleration/
rapid stop deceleration time set in the parameter block.
Rapid stop by fixed inclination
(deceleration speed).
(Inclination is set by the speed
limit value and rapid stop
deceleration time of parameter
block.)
V
(Note-1)
(Note-1)
t
ON
Servo program start
OFF
Rapid stop command
(M3201+20n),
servo error, etc.
OFF
Speed change request
(CHGV)
OFF
Positioning complete
signal (M2401+20n)
ON
Command in-position
signal (M2403+20n)
ON
ON
ON
OFF
OFF
(Note-1): Rapid stop cause
(11) When the fixed position stop command turns on, the command in-position check
starts. When the absolute value of difference between the setting address and
feed current value below the "command in-position range" set in the fixed
parameter, the command in-position signal (M2403+20n) turns on. The
command in-position signal (M2403+20n) turns on by a positioning start.
(12) A positioning control to address specified with the speed limit value is executed
when the fixed position stop command turns on with speed "0" (before PVF
instruction execution/at speed change to speed "0" during PVF instruction
execution).
[Program]
Program for speed control with fixed position stop is shown as the following conditions.
(1) System configuration
Speed control with fixed position stop for "Axis 1".
Motion CPU control module
Q61P Q03UD Q172D QX41
CPU
CPU
QY41 Q172D
LX
Positioning start command (PX000)
AMP
Axis
1 M
AMP
Axis
2 M
6 - 169
AMP
Axis
3 M
AMP
Axis
4 M
6 POSITIONING CONTROL
(2) Positioning conditions
(a) Speed control with fixed position stop conditions are shown below.
Item
Setting
Servo program No.
55
Start direction
Forward
Control axis
Axis 1
Positioning address
120.00000[degree]
Control speed
30000[degree/min]
Acceleration/deceleration time
20ms
Fixed position stop command device
M100
(b) Speed control with fixed position stop start command
............................................................ PX000 Leading edge (OFF
(c) Speed control with fixed position stop command
............................................................ PX000 Trailing edge (ON
ON)
OFF)
(3) Operation timing
Operation timing for speed control with fixed position stop is shown below.
Stop command of speed control
with fixed position stop
(PX000 Leading edge)
359.99999[degree]
Current value
120.00000[degree]
0[degree]
20[ms]
ON
PLC ready flag (M2000)
OFF
All axes servo ON command
(M2042)
OFF
All axes servo ON accept flag
(M2049)
OFF
Axis 1 servo ready (M2415)
OFF
Start command (PX000)
OFF
Servo program start
OFF
Axis 1 start accept flag (M2001)
OFF
Fixed position stop command
device (M100)
OFF
ON
ON
ON
ON
Positioning complete signal
(M2401)
Complete signal OFF command
(M3204)
Command in-position signal
(M2403)
ON
ON
ON
ON
OFF
ON
OFF
6 - 170
6 POSITIONING CONTROL
(4) Servo program
Servo program No.55 for speed control with fixed position stop is shown below.
<K 55>
Speed control with fixed position stop
PVF
Axis
120.00000
1,
Speed
Accel./decel. time
Fixed position stop
command
30000.000
20
M100
Axis used . . . . . . . . . . . . . Axis 1
Stop position . . . . . . . 120.00000
Speed. . . . . . . . . . . . . . . 30000.000
Accel./decel. time . . . . . . . . . . . . 20
Fixed position stop . . . . . . . . . M100
command
(5) Motion SFC program
Motion SFC program for which executes the servo program is shown below.
Speed control with fixed position stop
Speed control with f ixed position stop
[F10]
[G10]
[K55]
SET M2042
Turn on all axes servo ON command.
PX000*M2415
Wait until PX000, Axis 1 servo ready turn on.
PVF
Axis
Fixed position stop with speed control start
1,
120.00000 degree
Speed
30000.000 degree/min
20 ms
Accel./decel. time
Fixed position stop M100
command
[G20]
[F20]
[G30]
[F30]
Axis used . . . . . . . . . . . . . . . Axis 1
Stop position . . . . . . . . . . . . . 120.00000
Speed . . . . . . . . . . . . . . . . . . . . . 30000.000
Accel./decel. time . . . . . . . . . . . . 20
Fixed position stop command . . . M100
!PX000
Wait until PX000 turn off after speed control
with f ixed position stop start .
SET M100
Turn on fixed position stop command.
Wait until Axis 1 start accept flag turn off.
!M2001
Turn off fixed position stop command.
RST M100
END
(Note): Example of the above Motion SFC program is started using the automatic start or PLC program.
6 - 171
6 POSITIONING CONTROL
6.20 Simultaneous Start
Simultaneous start of the specified servo program at one start is executed.
Simultaneous start is started using the START servo program instruction.
Others
Allowable error range for circular interpolation
Program No.
Others
Speed change
S-curve ratio
Deceleration processing on stop input
Rapid stop deceleration time
Deceleration time
Acceleration time
Speed limit value
Control unit
Central point
Auxiliary point
Torque limit value
M-code
Dwell time
Command speed
Address/travel value
Torque limit value
Parameter block
Number of
control axes
Axis
Positioning
method
Parameter block No.
Servo
instruction
Arc
Radius
Items set using MT Developer
Common
START
: Must be set
: It changes by the servo program for simultaneous start.
[Control details]
Control using START instruction
(1) Simultaneous start of the specified servo programs is executed.
(2) The servo program except for the simultaneous start (START instruction) can be
specified.
(3) Up to 3 servo programs can be specified.
(4) Each axis is controlled using the specified servo program after the simultaneous
start.
[Cautions]
(1) A check is made at the start. An error occurs and operation does not start in the
following cases.
Error
Error processing
Stored codes
SD516
SD517
Specified servo program
does not exist.
Servo program setting
START instruction is set as
error flag
the specified servo program.
(SM516): ON
The specified servo program
start axis is already used.
Start accept flag
(M2001+n): OFF
A servo program cannot
start by an error.
Erroneous program No. of
simultaneous start.
19
Erroneous program No. of
program specified with
simultaneous start.
Error Item data
(Refer to Section 3.5)
(2) The servo program No. specified using START instruction cannot be set indirectly.
6 - 172
6 POSITIONING CONTROL
[Program]
Program for simultaneous start is shown as the following conditions.
(1) System configuration
Simultaneous start for "Axis 1 and Axis 2", Axis 3 and Axis 4.
Motion CPU control module
Q61P Q03UD Q172D QX41
CPU
CPU
QY41 Q172D
LX
Start command (PX000)
AMP
Axis
1 M
AMP
Axis
2 M
AMP
Axis
3 M
AMP
Axis
4 M
(2) Number of specified servo programs and program No.
(a) Number of specified servo programs : 3
(b) Specified servo program No. are shown below.
Servo Program No.
No.1
No.14
No.45
Used axis
Axis 1, Axis 2
Axis 3
Axis 4
Control Details
Circular interpolation control
Speed control
Home position return control
(3) Start conditions
(a) Simultaneous start servo program No. .................. No.121
(b) Simultaneous start execute command .................. PX000 Leading edge
(OFF ON)
(4) Servo program
Servo program No.121 for simultaneous start is shown below.
<K 121>
START
K
K
K
1
14
45
Simultaneous start
No.1 servo program
No.14 servo program
No.45 servo program
(Note): Example of the Motion SFC program for positioning control is shown next page.
6 - 173
6 POSITIONING CONTROL
(5) Motion SFC program
Motion SFC program for which executes the servo program is shown below.
Simultaneous start control
Simultaneous start control
[F10]
SET M2042
Turn on all axes servo ON command.
[G10]
PX000*M2415*M2435*M2455
*M2475
Wait until PX000, Axis 1 servo ready, Axis 2 servo ready,
Axis 3 servo ready and Axis 4 servo ready turn on.
[K121] START
K
K
K
1
14
45
Simultaneous start control
No.1 servo program
No.14 servo program
No.45 servo program
Wait until PX000 turn off after simultaneous start
completion.
[G20] !PX000
END
(Note): Example of the above Motion SFC program is started using the automatic start or PLC program.
6 - 174
6 POSITIONING CONTROL
6.21 JOG Operation
The setting JOG operation is executed.
Individual start or simultaneous start can be used in the JOG operation.
JOG operation can be executed using the Motion SFC program or test mode of
MT Developer.
(Refer to the help of MT Developer for JOG operation method in the test mode of MT
Developer.)
JOG operation data must be set for each axis for JOG operation. (Refer to Section
6.21.1.)
6.21.1 JOG operation data
JOG operation data is the data required to execute JOG operation.
Set the JOG operation data using MT Developer.
Table 6.2 JOG operation data list
Setting range
No.
Item
mm
Setting
range
inch
Units
Setting
range
degree
Units
Setting
range
PLS
Units
Setting
range
Units
Initial
Units
value
Remarks
1
• Sets the maximum speed at
the JOG operation.
JOG
0.001 to
0.01 to
mm
0.001 to
inch
degree
1 to
PLS/ 2000
• If JOG speed setting exceeds
speed limit
2147483.647
PLS/s
6000000.00 /min 600000.000 /min
/min 2147483647 s
0
the JOG speed limit value, it is
value
(Note-1)
controlled with JOG speed
limit value.
2
Parameter
block
setting
1 to 64
1
Explanatory
section
• Sets the parameter block No.
to be used at the JOG
operation.
4.3
(Note-1): When the "speed control 10 multiplier speed setting for degree axis" is set to "valid", the setting range is 0.01 to 21474836.47[degree/min].
(1) JOG operation data check
A relative check of the JOG operation data is executed at the following timing:
• JOG operation Individual start
• JOG operation simultaneous start
• JOG operation request
(2) Data error processing
• Only data for which detected errors is controlled as default value.
• The error code corresponding to each data for erroneous axis is stored in the
data register.
POINT
Start to outside the range of stroke limit of fixed parameter cannot be executed.
However, JOG operation is possible in the direction from outside the stroke limit
range to back inside the stroke limit range.
Stroke limit lower
. . . Dose not start
. . . Start
6 - 175
Stroke limit upper
. . . Dose not start
. . . Start
6 POSITIONING CONTROL
6.21.2 Individual start
JOG operation for the specified axes is started.
JOG operation is executed by the following JOG operation commands:
• Forward JOG start command ........... M3202+20n
• Reverse JOG start command ........... M3203+20n
[Control details]
(1) JOG operation continues at the JOG speed setting register value while the JOG
operation command turns on, and a deceleration stop is made by the JOG
operation command OFF.
Control of acceleration/deceleration is based on the data set in JOG operation
data.
V
Acceleration based
on JOG operation
data
JOG operation speed
Deceleration stop based
on JOG operation data
t
ON
JOG operation command
(M3202+20n/M3203+20n)
OFF
JOG operation for axis for which JOG operation command is turning on is
executed.
6 - 176
6 POSITIONING CONTROL
(2) The setting range for JOG speed setting registers are shown below.
No.
JOG operation
JOG speed setting register
(Note)
Forward JOG
Reverse JOG
Most significant Least significant
1
M3202
M3203
D641
D640
2
M3222
M3223
D643
D642
3
M3242
M3243
D645
D644
4
M3262
M3263
D647
D646
5
M3282
M3283
D649
D648
6
M3302
M3303
D651
D650
7
M3322
M3323
D653
D652
8
M3342
M3343
D655
D654
9
M3362
M3363
D657
D656
10
M3382
M3383
D659
D658
11
M3402
M3403
D661
D660
12
M3422
M3423
D663
D662
13
M3442
M3443
D665
D664
14
M3462
M3463
D667
D666
15
M3482
M3483
D669
D668
16
M3502
M3503
D671
D670
17
M3522
M3523
D673
D672
18
M3542
M3543
D675
D674
19
M3562
M3563
D677
D676
20
M3582
M3583
D679
D678
21
M3602
M3603
D681
D680
22
M3622
M3623
D683
D682
23
M3642
M3643
D685
D684
24
M3662
M3663
D687
D686
25
M3682
M3683
D689
D688
26
M3702
M3703
D691
D690
27
M3722
M3723
D693
D692
28
M3742
M3743
D695
D694
29
M3762
M3763
D697
D696
30
M3782
M3783
D699
D698
31
M3802
M3803
D701
D700
32
M3822
M3823
D703
D702
Setting range
mm
Setting
range
1 to
600000000
inch
Units
Setting
range
degree
Units
Setting
range
PLS
Units
Setting
range
Units
10-3
10-2
10-3
1 to
1 to
degree
1 to
mm
inch
PLS/s
600000000
2147483647 /min 2147483647
/min
/min
(Note-1)
(Note-1) : When the "speed control 10 multiplier setting for degree axis" is set to "valid" in the fixed parameter, the unit is "
(Note-2): The range of axis No.1 to 8 is valid in the Q172DCPU.
10-2[degree/min] ".
POINT
When the JOG operation speed is set in the Motion SFC program, stores a value
which is 100 times the real speed in units of [mm] or 1000 times the speed in units
of [inch] or [degree] in the JOG speed setting register.
Example
If JOG operation speed of 6000.00[mm/min] is set, stores the value "600000" in
the JOG speed setting register.
(Note): Store a value which is 100 times the real speed in the JOG speed setting
register for the "degree axis control 10 multiplier speed setting valid".
6 - 177
6 POSITIONING CONTROL
[Cautions]
(1) If the forward JOG start command (M3202+20n) and reverse JOG start command
(M3203+20n) turn on simultaneously for a single axis, the forward JOG operation
is executed.
When a deceleration stop is made by the forward JOG start command OFF the
reverse JOG operation is not executed even if the reverse JOG start command is
ON. After that, when the reverse JOG start command turns off to on, the reverse
JOG operation is executed.
V
Forward JOG operation
t
ON
Forward JOG
start command
OFF
Reverse JOG
start command
OFF
Reverse JOG
operation
ON
Reverse JOG start
command ignored
(2) If the JOG operation command (M3202+20n/M3203+20n) turns on during
deceleration by the JOG operation command OFF, after deceleration stop,
JOG operation is not executed.
After that, the JOG operation is executed by the JOG operation command
OFF to ON.
V
JOG operation
t
ON
JOG operation OFF
command
6 - 178
6 POSITIONING CONTROL
(3) JOG operation by the JOG operation command (M3202+20n/M3203+20n) is not
executed during the test mode using a peripheral devices.
After release of test mode, the JOG operation is executed by turning the JOG
operation command off to on.
V
JOG operation is impossible
because not leading edge of
JOG operation command
JOG operation
JOG operation is
impossible during test
mode (start error)
t
During test mode ON
(SM501)
OFF
ON
JOG operation
command
OFF
[Program]
Program for JOG operation is shown as the following conditions.
(1) System configuration
JOG operation for Axis 1 and Axis 2.
Motion CPU control module
Q61P Q03UD Q172D QX41
CPU
CPU
QY41 Q172D
LX
Forward JOG operation command
(PX003 : Axis 1, PX005 : Axis 2)
AMP
Axis
1 M
AMP
Axis
2 M
AMP
Axis
3 M
AMP
Reverse JOG operation command
(PX004 : Axis 1, PX006 : Axis 2)
Axis
4 M
(2) JOG operation conditions
(a) Axis No. ................................... Axis 1, Axis 2
(b) JOG operation speed .............. 100000
(c) JOG operation commands
1) Forward JOG operation ....... Axis 1: PX003 ON, Axis 2: PX005 ON
2) Reverse JOG operation ...... Axis 1: PX004 ON, Axis 2: PX006 ON
6 - 179
6 POSITIONING CONTROL
(3) Motion SFC program
Motion SFC program for which executes JOG operation is shown below.
JOG operation-individual start
JOG operation-individual start
[F10]
SET M2042
Turn on all axes servo ON command.
[G10]
M2415*M2435
Wait until Axis 1 servo ready and Axis 2 servo ready
turn on.
P1
[F20]
D640L=K100000
D642L=K100000
[F30]
SET M3202=PX003 * !M3203
RST M3202=!PX003
SET M3203=PX004 * !M3202
RST M3203=!PX004
SET M3222=PX005 * !M3223
RST M3222=!PX005
SET M3223=PX006 * !M3222
RST M3223=!PX006
Transfer the JOG operation speed to D640L and
D642L.
Axis 1, Axis 2 forward/reverse JOG operation
Axis 1 forward JOG start command SET/RST
Axis 1 reverse JOG start command SET/RST
Axis 2 forward JOG start command SET/RST
Axis 2 reverse JOG start command SET/RST
P1
(Note): Example of the above Motion SFC program is started using the automatic start or PLC program.
6 - 180
6 POSITIONING CONTROL
6.21.3 Simultaneous start
Simultaneous start JOG operation for specified multiple axes.
[Control details]
(1) JOG operation continues at the JOG speed setting register value for each axis
while the JOG operation simultaneous start command (M2048) turns on, and a
deceleration stop is made by the M2048 OFF.
Control of acceleration/deceleration is based on the data set in the JOG operation
data.
V Acceleration based on
JOG operation speed
JOG operation data
Deceleration stop based
on JOG operation data
t
JOG operation based
on D710 to D713 data
D710 to D713
ON
OFF
M2048
(2) JOG operation axis is set in the JOG operation simultaneous start axis setting
register (D710 to D713).
b15
b14
b13
b12
b11
b10
b9
b8
b7
b6
b5
b4
b3
b2
b1
b0
Axis 8
Axis 7
Axis 6
Axis 5
Axis 4
Axis 3
Axis 2
Axis 1
D710
Axis 16 Axis 15 Axis 14 Axis 13 Axis 12 Axis 11 Axis 10 Axis 9
D711
Axis 32 Axis 31 Axis 30 Axis 29 Axis 28 Axis 27 Axis 26 Axis 25 Axis 24 Axis 23 Axis 22 Axis 21 Axis 20 Axis 19 Axis 18 Axis 17
D712
Axis 16 Axis 15 Axis 14 Axis 13 Axis 12 Axis 11 Axis 10 Axis 9
D713
Axis 32 Axis 31 Axis 30 Axis 29 Axis 28 Axis 27 Axis 26 Axis 25 Axis 24 Axis 23 Axis 22 Axis 21 Axis 20 Axis 19 Axis 18 Axis 17
Axis 8
Axis 7
Axis 6
Axis 5
Axis 4
Axis 3
Axis 2
Forward
rotation
JOG
Axis 1
Reverse
rotation
JOG
(Note-1) Set the JOG operation simultaneous
start axis with 1/0.
1: Simultaneous start is executed
0: Simultaneous start is not executed
(Note-2) The range of axis No.1 to 8 is valid in
the Q172DCPU.
6 - 181
6 POSITIONING CONTROL
(3) The setting range for JOG speed setting registers are shown below.
No.
(Note)
JOG operation
JOG speed setting register
Forward JOG Reverse JOG Most significant Least significant
1
M3202
M3203
D641
D640
2
M3222
M3223
D643
D642
3
M3242
M3243
D645
D644
4
M3262
M3263
D647
D646
5
M3282
M3283
D649
D648
6
M3302
M3303
D651
D650
7
M3322
M3323
D653
D652
8
M3342
M3343
D655
D654
9
M3362
M3363
D657
D656
10
M3382
M3383
D659
D658
11
M3402
M3403
D661
D660
12
M3422
M3423
D663
D662
13
M3442
M3443
D665
D664
14
M3462
M3463
D667
D666
15
M3482
M3483
D669
D668
16
M3502
M3503
D671
D670
17
M3522
M3523
D673
D672
18
M3542
M3543
D675
D674
19
M3562
M3563
D677
D676
20
M3582
M3583
D679
D678
21
M3602
M3603
D681
D680
22
M3622
M3623
D683
D682
23
M3642
M3643
D685
D684
24
M3662
M3663
D687
D686
25
M3682
M3683
D689
D688
26
M3702
M3703
D691
D690
27
M3722
M3723
D693
D692
28
M3742
M3743
D695
D694
29
M3762
M3763
D697
D696
30
M3782
M3783
D699
D698
31
M3802
M3803
D701
D700
32
M3822
M3823
D703
D702
Setting range
mm
Setting
range
1 to
600000000
inch
Units
Setting
range
10-2
1 to
mm
600000000
/min
degree
Units
Setting
range
PLS
Units
Units
10-3
10-3
1 to
degree
1 to
inch
PLS/s
2147483647 /min 2147483647
/min
(Note-1)
(Note-1): When the "speed control 10 multiplier setting for degree axis" is set to "valid" in the fixed parameter, the unit is "
(Note-2): The range of axis No.1 to 8 is valid in the Q172DCPU.
6 - 182
Setting
range
-2
10 [degree/min] ".
6 POSITIONING CONTROL
[Program]
Program for simultaneous start of JOG operations are shown as the following
conditions.
(1) System configuration
JOG operation for Axis 1 and Axis 2.
Motion CPU control module
Q61P Q03UD Q172D QX41
CPU
CPU
QY41 Q172D
LX
JOG operation command (PX000)
AMP
Axis
1 M
AMP
AMP
Axis
2 M
Axis
3 M
AMP
Axis
4 M
(2) JOG operation conditions
(a) JOG operation conditions are shown below.
Item
Axis No.
JOG operation speed
JOG operation conditions
Axis 1
Axis 2
150000
150000
(b) JOG operation command ...... During PX000 ON
(3) Motion SFC program
Motion SFC program for which executes the simultaneous start of JOG operation
is shown below.
Simultaneous start
JOG operation is executed with the speed of
150000[mm/min] as the following, when the
2 axes simultaneous start switch (PX000)
turns on.
Simultaneous start
[F10]
[G10]
SET M2042
Turn on all axes servo ON command.
M2415*M2435
Wait until Axis 1 servo ready and Axis 2 servo ready turn on.
P0
[G20]
PX000
JOG operation is executed at the
JOG operation simultaneous start command ON
[F30]
[F20] D710=H0002
D712=H0001
D640L=K150000
D642L=K150000
SET M2048
RST M2048
P0
(Note): Example of the above Motion SFC program is started using the automatic start or PLC program.
6 - 183
6 POSITIONING CONTROL
6.22 Manual Pulse Generator Operation
Positioning control based on the number of pulses inputted from the manual pulse
generator is executed.
Simultaneous operation for 1 to 3 axes is possible with one manual pulse generator,
the number of connectable modules are shown below.
Number of connectable to the manual pulse generator
3
POINT
• When two or more Q173DPXs are installed, connect the manual pulse generator
to first (It counts from 0 slot of the main base) Q173DPX.
(When the manual pulse generator is used, only first Q173DPX is valid.)
[Control details]
(1) Positioning of the axis set in the manual pulse generator axis setting register
based on the pulse input from the manual pulse generator.
Manual pulse generator operation is only valid while the manual pulse generator
enable flag turn ON.
Manual pulse generator
connecting position
Manual pulse generator
axis No. setting register
Manual pulse generator
enable flag
P1
P2
P3
D714, D715
D716, D717
D718, D719
M2051
M2052
M2053
(2) The travel value and output speed for positioning control based on the pulse input
from manual pulse generator are shown below.
(a) Travel value
The travel value based on the pulse input from a manual pulse generator is
calculated using the following formula.
[Travel value] = [Travel value per pulse] [Number of input pulses]
pulse generator 1- pulse input magnification setting]
[Manual
The travel value per pulse for manual pulse generator operation is shown
below.
Unit
mm
inch
degree
PLS
Travel value
0.1 [µm]
0.00001 [inch]
0.00001 [degree]
1 [PLS]
If units is [mm], the command travel value for input of one pulse is:
(0.1[µm]) (1[PLS]) (Manual pulse generator 1- pulse input
magnification setting)
6 - 184
6 POSITIONING CONTROL
(b) Output speed
The output speed is the positioning speed corresponding to the number of
pulses input from a manual pulse generator in unit time.
[Output speed] = [Number of input pulses per 1[ms]]
input magnification setting]
[Manual pulse generator 1- pulse
(3) Setting of the axis operated by the manual pulse generator
The axis operated by the manual pulse generator is set in the manual pulse
generator axis setting register (D714 to D719).
The bit corresponding to the axis controlled (1 to 32) is set.
(4) Manual pulse generator 1- pulse input magnification setting
Make magnification setting for 1- pulse input from the manual pulse generator for
each axis.
1- pulse input magnification setting register
Applicable axis No. (Note-1)
D720
Axis 1
D721
Axis 2
D722
Axis 3
D723
Axis 4
D724
Axis 5
D725
Axis 6
D726
Axis 7
D727
Axis 8
D728
Axis 9
D729
Axis 10
D730
Axis 11
D731
Axis 12
D732
Axis 13
D733
Axis 14
D734
Axis 15
D735
Axis 16
D736
Axis 17
D737
Axis 18
D738
Axis 19
D739
Axis 20
D740
Axis 21
D741
Axis 22
D742
Axis 23
D743
Axis 24
D744
Axis 25
D745
Axis 26
D746
Axis 27
D747
Axis 28
D748
Axis 29
D749
Axis 30
D750
Axis 31
D751
Setting range
1 to 10000
Axis 32
(Note-1): The range of axis No.1 to 8 is valid in the Q172DCPU.
(Note): The manual pulse generator does not have the speed limit value, so they set the magnification setting
within the related speed of servomotor.
6 - 185
6 POSITIONING CONTROL
(5) The setting manual pulse generator 1- pulse input magnification checks the "1pulse input magnification setting registers of the manual pulse generator" of the
applicable axis at leading edge of manual pulse generator enable flag.
If the value is outside of range, the manual pulse generator axis setting error
register (SD513 to SD515) and manual pulse generator axis setting error flag
(SM513) are set and a value of "1" is used for the magnification.
(6) Manual pulse generator smoothing magnification setting
A magnification to smooth leading edge/trailing edge of manual pulse generator
operation is set.
Manual pulse generator smoothing
magnification setting register
Manual pulse generator 1 (P1): D752
Manual pulse generator 2 (P2): D753
Manual pulse generator 3 (P3): D754
Setting range
0 to 59
(a) Operation
Manual pulse generator input
ON
Manual pulse generator 1
enable flag (M2051)
OFF
V
V1
t
t
t
t
Output speed (V1) = [Number of input pulses/ms] [Manual pulse
generator 1- pulse input magnification setting]
Travel value (L) = [Travel value per pulse] [Number of input pulses]
[Manual pulse generator 1-pulse input magnification
setting]
(b) When the smoothing magnification is set, the smoothing time constant is as
following formula.
Smoothing time constant (t) = (Smoothing magnification + 1) 56.8 [ms]
REMARK
The smoothing time constant is within the range of 56.8 to 3408 [ms].
6 - 186
6 POSITIONING CONTROL
(7) Errors details at the data setting for manual pulse generator operation are shown
below.
Error details
Error processing
Axis set to manual pulse generator
operation is specified.
Axis setting is 4 axes or more
All of bit is "0" for the effective axis No.
of manual pulse generator axis No.
setting register.
• Duplicated specified axis is ignored.
• First setting manual pulse generator operation is
executed.
• Manual pulse generator operation is executed
according to valid for 3 axes from the lowest manual
pulse generator axis setting register.
• Manual pulse generator operation is not executed.
[Cautions]
(1) The start accept flag turns on for axis during manual pulse generator operation.
Positioning control or home position return cannot be started using the Motion
CPU or MT Developer.
Turn off the manual pulse generator enable flag after the manual pulse generator
operation end.
(2) The torque limit value is fixed at 300[%] during manual pulse generator operation.
(3) If the manual pulse generator enable flag turns on for the starting axis by
positioning control or JOG operation, an error [214] is set to the applicable axis
and manual pulse generator input is not enabled. After the axis has been stopped,
the leading edge of manual pulse generator enable flag becomes valid, the start
accept flag turns on by the manual pulse generator input enabled status, and input
from the manual pulse generator is input.
V
Positioning control
Manual pulse generator operation
t
ON
Manual pulse generator 1 OFF
enable flag (M2051)
Manual pulse generator
enable status
Start accept flag
Enable
Disable
ON
OFF
Input from manual
pulse generator is
ignored.
(4) If the manual pulse generator enable flag of another manual pulse generator No.
turns on for axis during manual pulse generator operation, an error [214] is set to
the applicable axis and the input of that manual pulse generator is not enabled.
Turn the manual pulse generator enable flag on again after stopping the manual
pulse generator operation which had become input enable previously.
6 - 187
6 POSITIONING CONTROL
(5) If the manual pulse generator enable flag turns on again for axis during smoothing
deceleration after manual pulse generator enable flag turns off, an error [214] is
set and manual pulse generator input is not enabled. Turn the manual pulse
generator enable flag on after smoothing deceleration stop (after the start accept
flag OFF).
(6) If another axis is set and the same manual pulse generator enable flag turns on
again during smoothing deceleration after manual pulse generator enable flag
turns off, the manual pulse generator input is not enabled.
At this time, the manual pulse generator axis setting error bit of the manual pulse
generator axis setting error storage register (SD513 to SD515) turns on, and the
manual pulse generator axis setting error flag (SM513) turns on.
Include the start accept flag OFF for specified axis in interlocks as the conditions
which turn on the manual pulse generator enable flag.
[Procedure for manual pulse generator operation]
Procedure for manual pulse generator operation is shown below.
Start
Set the manual pulse generator
1- pulse input magnification
Set the manual pulse generator
operation axis
Using the Motion SFC program
Turn the manual pulse
generator enable flag ON
Execute the positioning by
manual pulse generator
Turn the manual pulse
generator enable flag OFF
. . . . . . . Using the Motion SFC program
End
6 - 188
6 POSITIONING CONTROL
[Program]
Program executes manual pulse generator operation is shown as the following
conditions.
(1) System configuration
Manual pulse generator operation of Axis 1 and Axis 2.
Motion CPU control module
Q61P Q03UD Q172D QX41
CPU
CPU
QY41 Q172D
PX
Manual pulse generator P1
Manual pulse generator enable flag
(M2051 : P1, M2052 : P2)
Manual pulse generator P2
AMP
Axis
1 M
AMP
Axis
2 M
AMP
Axis
3 M
AMP
Axis
4 M
(2) Manual pulse generator operation conditions
(a) Manual pulse generator operation axis................Axis 1, Axis 2
(b) Manual pulse generator 1- pulse input magnification............ 100
(c) Manual pulse generator operation enable ...........M2051 (Axis 1)/
M2052 (Axis 2) ON
(d) Manual pulse generator operation end ................M2051 (Axis 1)/
M2052 (Axis 2) OFF
(3) Motion SFC program
Motion SFC program for manual pulse generator operation is shown below.
Manual pulse generator
Manual pulse generator
[F10] SET M2042
[G10] PX000*M2415*M2435
Wait until PX000, Axis 1 servo ready and
Axis 2 servo ready turn on.
[F20] D720=100
D721=100
D714L=H00000001
D716L=H00000002
SET M2051
SET M2052
Manual pulse generator 1- pulse input
magnification for Axis 1, Axis 2.
Control Axis 1 by P1.
Control Axis 2 by P2.
Manual pulse generator enable flag ON
for Axis 1, Axis 2.
[G20] !PX000
Wait until PX000 turn off after manual pulse
generator operation end.
[F30] RST M2051
RST M2052
Manual pulse generator enable flag OFF
for Axis 1, Axis 2.
(Note): Turn the manual pulse generator enable
flag off for P1, P2, so that the operation
may not continued for safety.
END
(Note): Example of the above Motion SFC program is started using the automatic start or PLC program.
6 - 189
6 POSITIONING CONTROL
MEMO
6 - 190
6 POSITIONING CONTROL
6.23 Home Position Return
(1) Use the home position return at the power supply ON and other times where
confirmation of axis is at the machine home position is required.
(2)
The following six methods for home position return are shown below.
• Proximity dog type
• Count type
• Data set type
• Dog cradle type
• Stopper type
• Limit switch combined type
(3) The home position return data must be set for each axis to execute the home
position return.
(4) Select the optimal home position return method for the system configuration and
applications with reference to the following.
Home position return methods
Proximity dog type
Contents
Applications
• Home position is zero point of servomotor. • It is used in the system which can surely pass a
Proximity dog type 1 • When the proximity dog is ON, it cannot be zero point from the home position return start to
OFF.
started.
proximity dog ON
• Home position is zero point of servomotor. • This method is valid when the stroke range is
Proximity dog type 2 • When the proximity dog is ON, it can be
short and "proximity dog type 1" cannot be used.
started.
• Home position is zero point of servomotor. • It is used in the system which can surely pass a
zero point from the home position return start to
Count type 1
point of travel distance set as "travel value after
proximity dog ON".
(Note)
Count type
• Zero point is not used in the home position • This method is used when the proximity dog is
Count type 2
return.
near the stroke end and the stroke range is
narrow.
• Home position is zero point of servomotor. • This method is valid when the stroke range is
Count type 3
short and "count type 1" cannot be used.
• Home position is command position of
• External input signals such as dog signal are not
Motion CPU.
set in the absolute position system.
Data set type 1
• This method is valid for the data set independent
Data set type
of a deviation counter value.
• Home position is real position of
• External input signals such as dog signal are not
Data set type 2
servomotor.
set in the absolute position system.
• Home position is zero point of servomotor • It is easy to set the position of proximity dog,
Dog cradle type
immediately after the proximity dog signal
because the proximity dog is set near the
ON.
position made to the home position.
• Home position is position which stopped
• This method is valid to improve home position
Stopper type 1
the machine by the stopper.
accuracy in order to make the home position for
• Proximity dog is used.
the position which stopped the machine by the
Stopper type
stopper.
• Home position is position which stopped
Stopper type 2
the machine by the stopper.
• Proximity dog is not used.
• Home position is zero point of servomotor. • It is used in the system that the proximity dog
Limit switch combined type
• Proximity dog is not used.
signal cannot be used and only external limit
• External limit switch is surely used.
switch can be used.
(Note): If the proximity dog signal of servo amplifier is used, the count type home position return cannot be execute.
6 - 191
6 POSITIONING CONTROL
6.23.1 Home position return data
This data is used to execute the home position return.
Set this data using MT Developer.
Table 6.3 Home position return data list
Setting range
No.
Item
mm
Setting range
1
Home position
return direction
2
Home position
return method
3
Home position
address
4
Home position
return speed
5 Creep speed
Travel value
6 after proximity
dog ON
7
Units
Setting range
degree
Units
Speed set at
11 the home
position shift
Torque limit
12 value at the
creep speed
Operation
setting for
13 incompletion
of home
position return
Units
Setting range
Units
Indirect setting
Initial
Units
value
Valid/ Number
invalid of words
0
0
PLS
0
PLS
2
PLS/s
1
PLS/s
2
1 to
10000000
PLS/s
1
PLS/s
2
0 to
2147483647
PLS
0
PLS
2
0
ms
1
0
PLS
2
%
1
(Note-1)
0.01 to
6000000.00
mm/min
0.0 to
214748364.7
µm
0.001 to
600000.000
0.00000
to
21474.83647
0.001 to
inch/min 2147483.647 degree/min
(Note-1)
inch
Parameter
Block setting
Home position
shift amount
Setting range
PLS
0: Reverse direction (Address decrease direction)
1: Forward direction (Address increase direction)
7: Dog cradle type
0: Proximity dog type 1
8: Stopper type 1
4: Proximity dog type 2
9: Stopper type 2
1: Count type 1
10: Limit switch combined type
5: Count type 2
6: Count type 3
2: Data set type 1
3: Data set type 2
-214748364.8
-21474.83648
-2147483648
0 to
to
µm
to
inch
degree
to
359.99999
214748364.7
21474.83647
2147483647
0.001 to
1 to
0.01 to
0.001 to
mm/min
inch/min 2147483.647 degree/min
10000000
6000000.00
600000.000
0.00000 to
21474.83647
degree
1 to 64
Home position
8 return retry
function
Dwell time at
the home
9
position return
retry
10
inch
1
0: Invalid (Do not execute the home position return retry by limit switch.)
1: Valid (Execute the home position return retry by limit switch.)
0
0 to 5000 [ms]
-214748364.8
to
214748364.7
µm
-21474.83648
to
21474.83647
inch
-21474.83648
to
21474.83647
0: Home position return speed
1: Creep speed
1 to 1000 [%]
0: Execute a servo program
1: Not execute a servo program
6 - 192
degree
-2147483648
to
2147483647
PLS
0
300
1
6 POSITIONING CONTROL
Remarks
Explanatory
section
• The home position return direction is set.
• The home position return method is set.
• The proximity dog type or count type are recommended for the servo amplifier which does not support absolute value.
• The current value of home position after the home position return is set.
• The home position return speed is set.
• The creep speed (low speed immediately before stopping after deceleration from home position return speed) after the proximity dog ON is
set.
• The travel value after the proximity dog ON for the count type is set.
• More than the deceleration distance at the home position return speed is set.
6.23.1 (1)
• The parameter block (Refer to Section 4.3) No. to use for home position return is set.
• Valid/invalid of home position return retry is set.
• The stop time at the deceleration stop during the home position return retry is set.
6.23.1 (2)
• The shift amount at the home position shift is set.
• The operation speed which set the home position shift amount except "0" is set.
6.23.1 (3)
• The torque limit value with creep speed at the stopper type home position return is set.
6.23.1 (4)
• When the home position return request signal is ON, it set whether a servo program can be executed or not.
6.23.1 (5)
(Note-1): When the "speed control 10 multiplier setting for degree axis" is set to "valid" in the fixed parameter, the setting range is "0.01 to
21474836.47[degree/min] ".
6 - 193
6 POSITIONING CONTROL
(1) Travel value after proximity dog ON
(a) The travel value after proximity dog ON is set to execute the count type
home position return.
(b) After the proximity dog ON, the home position is the first zero-point after
travel by the setting travel value.
(c) Set the travel value after proximity dog ON more than the deceleration
distance from the home position return speed.
Example
The deceleration distance is calculated from the speed limit value, home position
return speed, creep speed and deceleration time as shown below.
[Home position return operation]
Speed limit value : VP=200kpps
Home position return speed : VZ=10kpps
Creep speed : VC=1kpps
Real deceleration time : t=TB
t
VZ
VP
TB
Deceleration time : TB=300ms
[Deceleration distance (shaded area under graph)]
1
VZ
t
=
2 1000
Converts in speed per millisecond
VZ
TB VZ
=
2000
VP
=
10 103
2000
300 10 103
200 103
= 75 . . . . . . Set 75 or more
POINT
A home position return must be made after the servomotor has been rotated more
than one revolution to pass the axis through the Z-phase (motor reference position
signal).
For a proximity dog type or count type home position return, the distance between
the point where the home position return program is started and the deceleration
stop point before re-travel must be such that the servomotor is rotated more than
one revolution to pass the axis through the Z-phase.
When a data set type home position return is made in an ABS (absolute position)
system, the servomotor must also have been rotated more than one revolution by
JOG operation or the like to pass the axis through the Z-phase.
(Note) : When "1 : No servomotor Z-phase pass after power ON" is selected in the
"function selection C-4" of servo parameter (expansion setting parameter),
even if it does not pass zero point, the home position return can be
executed and restrictions are lost.
6 - 194
6 POSITIONING CONTROL
(2) Home position return retry function/dwell time at the home position
return retry
(a) Valid/invalid of home position return retry is set.
(b) When the valid of home position return retry function is set, the time to stop
at return of travel direction is set with dwell time at the home position return
retry.
(c) Operation for the proximity dog type home position return by setting "valid"
for home position return retry function is shown below.
The temporary stop is made during time
set in the "dwell time at the home
position return retry".
Acceleration time Deceleration time
5)
Home position
return direction
1)
2)
6)
Home
position
4)
Home position
return start
3)
External limit switch
Proximity
dog
Zero point
The temporary stop is made during time
set in the "dwell time at the home
position return retry".
1) It travels to preset
direction of home
position return.
2) If the external upper/lower
limit switch turns OFF
before the detection of
proximity dog, a
deceleration stop is made.
3) After a deceleration stop,
the temporary stop is
made during time set in
the "dwell time at the
home position return retry"
and it travels to reverse
direction of home position
return with the home
position return speed.
4) A deceleration stop is
made by the proximity dog
OFF.
5) After a deceleration stop,
the temporary stop is
made during time set in
the "dwell time at the
home position return retry"
and it travels to direction
of home position return.
6) Home position return
ends.
Fig. 6.31 Operation for home position return retry function
(d) Possible/not possible of home position return retry function by the home
position return method is shown below.
Home position return
methods
Proximity dog type
Count type
Data set type
Dog cradle type
Stopper type
Limit switch combined type
Possible/not possible of home position
return retry function
: Possible,
6 - 195
: Not possible
6 POSITIONING CONTROL
(3) Home position shift amount/speed set at the home position shift
(a) The shift (travel) amount from position stopped by home position return is
set.
(b) If the home position shift amount is positive value, it shifts from detected
zero point signal to address increase direction. If it is negative value, it shifts
from detected zero point signal to address decrease direction.
(c) Operation speed which set the home position shift amount except "0" is set
in the speed set at the home position shift. Select one of the "home position
return speed" or "creep speed".
Home position shift amount is positive value
Address increase
direction
Home position
return speed
Address decrease
direction
Home position
return direction
Creep speed
Home position
return start
Set the operation speed at
the home position shift with
speed set at the home
position shift.
Select one of "home
position return speed" or
"creep speed".
Home
position
Home position shift amount
(Positive value)
Home position
return re-travel
value
Travel value after proximity dog ON
Proximity dog
Zero point
Home position shift amount is negative value
Address decrease
direction
Address increase
direction
Home position
return direction
Home position
return speed
Home position
return re-travel value
Home position
return start
Creep speed
Home position
Creep speed
Set the operation speed at
the home position shift with
speed set at the home
position shift.
Select one of "home
position return speed" or
"creep speed".
Travel value after
proximity dog ON
Home position
return speed
Proximity dog
Home position shift amount
(Negative value)
Zero point
Fig. 6.32 Home position shift amount/speed set at the home position shift
6 - 196
6 POSITIONING CONTROL
(d) Valid/invalid of the setting value for home position shift amount by the home
position return method is shown below.
Home position return
methods
Proximity dog type
Count type
Data set type
Dog cradle type
Stopper type
Limit switch combined type
Valid/invalid of home position shift
amount
: Valid,
: Invalid
POINT
(1) Home position shift function is used to rectify a home position stopped by the
home position return. When there are physical restrictions in the home position
by the relation of a proximity dog setting position, the home position is rectified
to the optimal position. Also, by using the home position shift function, it is not
necessary to care the zero point for mounting of servomotor.
(2) After proximity dog ON, if the travel value including home position shift amount
-1
-5
exceeds the range of "-2147483648 to 2147483647" [ 10 µm, 10 inch,
-5
10 degree, PLS], "travel value after proximity dog ON" of monitor register is
not set correctly.
(4) Torque limit value at the creep speed
(a) Torque limit value at the creep speed (on press) is set in the case of using
the pressed position as the home position by the home position return of
stopper type 1, 2.
(b) Valid/invalid of the torque limit value at the creep speed by the home
position return method is shown below.
Home position return
methods
Proximity dog type
Count type
Data set type
Dog cradle type
Stopper type
Limit switch combined type
Valid/invalid of torque limit value at the
creep speed
: Valid,
6 - 197
: Invalid
6 POSITIONING CONTROL
(5) Operation setting for incompletion of home position return
(a) Operation in selecting "0: Execute servo program"
1) Servo program can be executed even if the home position return request
signal (M2409+20n) is ON.
(b) Operation in selecting "1: Not execute servo program"
1) Servo program cannot be executed if the home position return request
signal (M2409+20n) is ON. However, the servo program can be
executed even if the home position return request signal (M2409+20n) is
ON in the case of only servo program of home position return instruction
(ZERO).
2) At the time of servo program start, when "1: Not execute servo program"
is selected in the operation setting for incompletion of home position
return and the axis which the home position return request signal
(M2409+20n) is ON exists also with one axis, a minor error [121] occurs
and the servo program does not start.
3) JOG operation and manual pulse generator operation can be executed
regardless of the home position return request signal (M2409+20n)
ON/OFF.
4) Same operation is executed regardless of absolute position system or
not. When "1: Not execute servo program" is selected in the case of not
absolute position system, the home position return request signal
(M2409+20n) turns ON at power supply ON or reset of Multiple CPU
system and power supply ON of servo amplifier. Therefore, it must be
executed home position return before a servo program start.
5) Same operation is executed in also TEST mode.
6) This setting is valid in the real mode only. Servo program can be
executed for a virtual axis connected to the output axis which the home
position return request signal (M2409+20n) is ON.
(6) Indirect setting of home position return data
A part of home position return data can be executed the indirect setting by the
word devices of Motion CPU.
(a) Data devices for indirect setting
There are data registers (D), link registers (W), Motion registers (#) and
Multiple CPU area device (U \G) as data devices for indirect setting. (Word
devices except the above registers cannot be used.)
Usable devices are shown below. (Set the number of words for 2 words as
even number.)
Word devices
Usable devices
D
800 to 8191
W
0 to 1FFF
#
0 to 7999
U \G
10000 to (10000+p-1) (Note-1)
Note-1: "p" indicates the user setting area points of the Multiple CPU high speed transmission
area for the each CPU.
6 - 198
6 POSITIONING CONTROL
(b) Input of home position return
In the indirect setting by the word devices, the specified word device data
are read at servo program execution by Motion CPU.
Set data to devices for indirect setting and then execute the start request
of servo program at home position return.
POINT
(1) Indirect setting of axis cannot be executed using word devices in the servo
program.
(2) Take an interlock with start accept flag (M2001 to M2032) not to change until
the device data specified for indirect setting.
If the device data is changed before starting accept, it may not execute the
home position return at the normal value.
(3) Refer to the "Q173DCPU/Q172DCPU Motion controller Programming Manual
(COMMON)" for the user setting area points of the Multiple CPU high speed
transmission area.
(7) Setting items for home position return data
Limit switch combined type
Stopper type 2
Stopper type 1
Dog cradle type
Data set type 2
Data set type 1
Count type 3
Count type 2
Count type 1
Items
Proximity dog type 2
Proximity dog type 1
Home position return methods
Home position return direction
Home position address
Home position return speed
Creep speed
Travel value after proximity dog ON
Home position
return data
Parameter block setting
Home position return retry function
Dwell time at the home position return retry
Home position shift amount
Speed set at the home position shift
Torque limit value at the creep speed
Operation setting for incompletion of home position return
Interpolation control unit
Speed limit value
Acceleration time
Deceleration time
Parameter blocks Rapid stop deceleration time
S-curve ratio
Torque limit value
Deceleration processing at the stop time
Allowable error range for circular interpolation
: Must be set (Indirect setting)
: Must be set
: Must be not set
6 - 199
6 POSITIONING CONTROL
6.23.2 Home position return by the proximity dog type 1
(1) Proximity dog type 1
Zero point position after proximity dog ON to OFF is home position in this
method.
When it does not pass (zero pass signal: M2406+20n OFF) the zero point from
home position return start to deceleration stop by proximity dog ON to OFF, an
error will occur and home position return is not executed. However, when "1 : Not
need to pass motor Z phase after the power supply is switched on" is selected
in the "function selection C-4" of servo parameter (expansion setting parameter),
if it does not pass zero point from home position return start to deceleration stop
by proximity dog ON to OFF, the home position return can be executed.
(2) Home position return by the proximity dog type 1
Operation of home position return by proximity dog type 1 for passing (zero pass
signal: M2406+20n ON) the zero point from home position return start to
deceleration stop by proximity dog ON to OFF is shown below.
V
Home position
return direction
Home position
return start
Home position return speed
Creep speed
(Note) : A deceleration stop occurs after
the proximity dog OFF.
Positioning is carried out from this
position to the zero point.
The distance to the zero point is
based on the servo data.
t
Proximity dog
ON
OFF
Zero point
The travel value in this range is stored
in the monitor register "travel value
after proximity dog ON".
The travel value in this range is stored
in the monitor register "home position
return re-travel value".
Fig. 6.33 Home position return operation by the proximity dog type 1
(3) Home position return execution
Home position return by the proximity dog type 1 is executed using the servo
program in Section 6.23.16.
6 - 200
6 POSITIONING CONTROL
(4) Cautions
(a) Keep the proximity dog ON during deceleration from the home position
return speed to the creep speed.
If the proximity dog turns OFF before deceleration to the creep speed, a
deceleration stop is made and the next zero point is set as the home
position.
Home position return speed
The zero point is passed during
deceleration stop by the proximity dog OFF.
Setting creep speed
Proximity dog
ON
OFF
Zero point
Zero point of this range does not become the home position.
The next zero point becomes the home position.
(b) The position executed deceleration stop by the proximity dog OFF is near
zero point, a home position discrepancy equivalent to one revolution of the
servomotor may occur. Adjust the position of proximity dog OFF, such that
the home position return re-travel value becomes half the travel value for
one revolution of the servomotor.
If the position executed deceleration stop by the proximity dog
OFF is near zero point, the creep speed and deceleration
settings may result in a home position discrepancy
equivalent to one revolution of the servomotor.
Proximity dog
ON
OFF
Zero point
POINT
When the home position return retry function is not set in the following cases,
execute the home position return, after return the axis once to position before the
proximity dog ON by the JOG operation, etc.
Home position return cannot be executed without returning to position before the
proximity dog ON.
(1) Home position return with a position after the proximity dog ON to OFF.
(2) When the power supply turned OFF to ON after home position return end.
6 - 201
6 POSITIONING CONTROL
(c) When it does not pass (zero pass signal: M2406+20n ON) the zero point
from home position return start to deceleration stop by proximity dog ON to
OFF, a minor error "ZCT not set" (error code: 120) will occur, a deceleration
stop is made and home position return does not end normally. When a
distance between home position return start position and home position is
near and a zero point is not passed, select the proximity dog type 2.
(d) If home position return is executed in the proximity dog ON, a major error
"proximity dog signal is turning ON at the home position return start" (error
code: 1003) will occur, the home position return is not executed. Use the
proximity dog type 2 in this case.
(e) When home position return retry function is not set, if home position return is
executed again after home position return end, a minor error "home position
return completion signal is turning ON at the proximity dog type home
position return start" (error code: 115) will occur, the home position return is
not executed.
(f) If in-position signal (M2402+20n) does not turn ON, home position return is
not ended.
6 - 202
6 POSITIONING CONTROL
6.23.3 Home position return by the proximity dog type 2
(1) Proximity dog type 2
Zero point position after proximity dog ON to OFF is home position in this
method.
When it passed (zero pass signal: M2406+20n ON) the zero point from home
position return start to deceleration stop by proximity dog ON to OFF, operation
for "proximity dog type 2" is the same as "proximity dog type 1". (Refer to Section
6.23.2)
When it does not pass (zero pass signal: M2406+20n OFF) the zero point from
home position return start to deceleration stop by proximity dog ON to OFF, it
moves to home position return direction after the servomotor is rotated one
revolution to reverse direction and it passed the zero point, and the first zero
point position is set as home position after proximity dog ON to OFF.
(2) Home position return by the proximity dog type 2
Operation of home position return by proximity dog type 2 for not passing the
zero point from home position return start to deceleration stop by proximity dog
ON to OFF is shown below.
V
1) It travels to preset direction of home position
return with the home position return speed.
2) A deceleration is made to the creep speed by
5)
the proximity dog ON, after that, it travels
with the creep speed. (If the proximity dog
turns OFF during a deceleration, a
deceleration stop is made and the operation
Creep speed
1)
for 4) starts.)
2)
3) A deceleration stop is made by the proximity
3)
dog OFF.
4) After a deceleration stop, it travels for one
revolution of servomotor to reverse direction
Home position
of home position return with the home
Home position
return start
position return speed.
5) It travels to direction of home position return
with the home position return speed, the
home position return ends with first zero point
4)
after the proximity dog ON to OFF. (At this
time, a deceleration to the creep speed is not
Home position return speed
made with the proximity dog OFF to ON .
1 revolution
And if the zero point is not passed because of
droop pulses for processing of 4) and 5), a
Proximity dog
minor error "ZCT not set" (error code: 120)
Zero point will occur, a deceleration stop is made and
the home position return does not end
Zero point no passing
normally. In this case, adjust a position of
proximity dog OFF.)
Home position
return speed
Home position
return direction
The travel value in this range is stored in the monitor
register "travel value after proximity dog ON".
The travel value in this range is stored in the monitor
register "home position return re-travel value".
Fig. 6.34 Home position return operation by the proximity dog type 2
(zero point no passing)
(3) Home position return execution
Home position return by the proximity dog type 2 is executed using the servo
program in Section 6.23.16.
6 - 203
6 POSITIONING CONTROL
(4) Cautions
(a) A system which the servomotor can rotate one time or more is required.
(b) When a servomotor stops with specified condition enables and rotates to
reverse direction one time after proximity dog ON, make a system for which
does not turn OFF the external upper/lower stroke limit.
(c) Keep the proximity dog ON during deceleration from the home position
return speed to the creep speed.
If the proximity dog turns OFF before deceleration to the creep speed, a
deceleration stop is made and the next zero point is set as the home
position.
(d) If home position return is executed in the proximity dog ON, it starts with the
creep speed.
(e) When home position return retry function is not set, if home position return is
executed again after home position return completion, a minor error "home
position return completion signal is turning ON at the proximity dog type
home position return start" (error code: 115) will occur, the home position
return is not executed.
(f)
When "1 : Not need to pass motor Z phase after the power supply is
switched on" is selected in the "function selection C-4" of servo parameter
(expansion setting parameter), even if it does not pass zero point at the
servo amplifier power ON, the zero pass signal (M2406+20n) turns ON. This
operation is the same as proximity dog type 1.
(g) If in-position signal (M2402+20n) does not turn ON, home position return is
not ended.
6 - 204
6 POSITIONING CONTROL
6.23.4 Home position return by the count type 1
(1) Count type 1
After the proximity dog ON, the zero point after the specified distance (travel
value after proximity dog ON) is home position in this method. (If the proximity
dog signal of servo amplifier is used, the count type 1 home position return
cannot be executed.)
When the zero point is not passed (zero pass signal: M2406+20n OFF) until it
travels the distance set in the "travel value after proximity dog ON" from home
position return start, an error will occur and home position return is not executed.
However, when "1 : Not need to pass motor Z phase after the power supply is
switched on" is selected in the "function selection C-4" of servo parameter
(expansion setting parameter), if the zero point is not passed until it travels the
distance set in the "travel value after proximity dog ON" from home position
return start, the home position return can be executed.
The travel value after proximity dog ON is set in the home position return data
(Refer to Section 6.23.1).
(2) Home position return by the count type 1
Operation of home position return by count type 1 for passing the zero point
during travel of specified distance set in the "travel value after proximity dog ON"
from the home position return start is shown below.
V
Home position
return start
Home position return
direction
Home position
return speed
Creep speed
(Note) : After the proximity dog ON, positioning of the
"travel value after the proximity dog ON" of
the home position return data and the
positioning from the position to zero point.
The distance to the zero point is
based on the servo data
t
Proximity dog
ON
Zero point
The travel value in this range is stored in the monitor
register "travel value after proximity dog ON".
"Travel value after
proximity dog ON"
of the home
position return data
The travel value in this range is stored in the monitor
register "home position return re-travel value".
Fig. 6.35 Home position return operation by the count type 1
(3) Home position return execution
Home position return by the count type 1 is executed using the servo program in
Section 6.23.16.
6 - 205
6 POSITIONING CONTROL
(4) Cautions
(a) Home position return and continuously start of home position return are also
possible in the proximity dog ON in the count type 1.
When the home position return or continuously start of home position return
are executed in the proximity dog ON, the home position return is executed
after return the axis once to position of the proximity dog OFF.
(b) When the zero point is not passed (zero pass signal: M2406+20n ON) until it
travels the distance set in the "travel value after proximity dog ON" from
home position return start, a minor error "ZCT not set" (error code: 120) will
occur, a deceleration stop is made and home position return does not end
normally. When a distance between home position return start position and
home position is near and a zero point is not passed, select the count type 3.
(c) When the "travel value after proximity dog ON" is less than the deceleration
distance from "home position return speed" to "creep speed", a minor error
"an overrun occurred because the setting travel value is less than the
deceleration distance at the proximity dog signal input during home position
return of count type" (error code: 209) will occur and deceleration stop is
made.
(d) If in-position signal (M2402+20n) does not turn ON, home position return is
not ended.
6 - 206
6 POSITIONING CONTROL
6.23.5 Home position return by the count type 2
(1) Count type 2
After the proximity dog ON, the position which traveled the specified distance
(travel value after proximity dog ON) is home position in this method.
It is not related for zero point pass or not pass. (If the proximity dog signal of
servo amplifier is used, the count type 2 home position return cannot be
executed.)
A count type 2 is effective method when a zero point signal cannot be taken.
(However, dispersions will occur to the stop position at the home position return
compared with the count type 1.)
The travel value after proximity dog ON is set in the home position return data
(Refer to Section 6.23.1).
(2) Home position return by the count type 2
Operation of home position return by count type 2 is shown below.
V
Home position
return direction
Home position
return speed
Creep speed
(Note): After the proximity dog ON, a position
which traveled the distance "travel
value after proximity dog ON" of the
home position return data is home
position.
t
Proximity dog
Home position
return start
The travel value in this range is stored in the
monitor register "travel value after proximity dog
ON".
(Note): "Home position return re-travel value" = 0
Fig. 6.36 Home position return operation by the count type 2
(3) Home position return execution
Home position return by the count type 2 is executed using the servo program in
Section 6.23.16.
(4) Cautions
(a) Home position return and continuously start of home position return are also
possible in the proximity dog ON in the count type 2.
When the home position return and continuously start of home position
return are executed in the proximity dog ON, the home position return is
executed after return the axis once to position of the proximity dog OFF.
(b) When the "travel value after proximity dog ON" is less than the deceleration
distance from "home position return speed" to "creep speed", a minor error
"an overrun occurred because the setting travel value is less than the
deceleration distance at the proximity dog signal input during home position
return of count type." (error code: 209) will occur and deceleration stop is
made.
(c) Command position is the home position.
(d) If in-position signal (M2402+20n) does not turn ON, home position return is
not ended.
6 - 207
6 POSITIONING CONTROL
6.23.6 Home position return by the count type 3
(1) Count type 3
After the proximity dog ON, the zero point after the specified distance (travel
value after proximity dog ON) is home position in this method. (If the proximity
dog signal of servo amplifier is used, the count type 3 home position return
cannot be executed.)
When the zero point is passed (zero pass signal: M2406+20n ON) during travel
of specified distance set in the "travel value after proximity dog ON" from the
home position return start, home position return operation is the same as "count
type 1". (Refer to Section 6.23.4)
When a zero point is not passed (zero pass signal: M2406+20n OFF) during
travel of specified distance set in the "travel value after proximity dog ON" from
the home position return start, it rotates one time to reverse direction and passes
the zero point, re-travels to home position return direction, and then the first zero
point after the specified distance (travel value after proximity dog ON) after
proximity dog ON is set as home position.
The travel value after proximity dog ON is set in the home position return data
(Refer to Section 6.23.1).
(2) Home position return by the count type 3
Operation of home position return by count type 3 for not passing the zero point
during travel of specified distance set in the "travel value after proximity dog ON"
from the home position return start is shown below.
V
Home position
return speed
Home position
return direction
1)
2)
Home position
return start
4)
Home position
return speed
1 revolution
Proximity dog
Zero point no passing
1) It travels to preset direction of home
position return with the home position
return speed.
2) A deceleration is made to the creep speed
by the proximity dog ON, after that, it
travels with the creep speed.
5)
3) A deceleration stop is made in the position
which traveled the travel value set as travel
value after proximity dog ON.
4) After a deceleration stop, it travels for one
Creep speed
revolution of servomotor to reverse
direction of home position return with the
3)
home position return speed.
5) It travels to direction of home position
return with the home position return speed,
the home position return with first zero
Home position
point after traveling the travel value set as
travel value after proximity dog ON from
after the proximity dog ON.
(At this time, a deceleration to the creep
speed is not made with the proximity dog
OFF to ON. And if the zero point is not
passed because of droop pulses for
processing of 4) and 5), a minor error "ZCT
not set" (error code: 120) will occur, a
deceleration stop is made and home
Zero point
position return does not end normally. In
this case, adjust a position of proximity dog
ON.)
The travel value in this range is stored in the monitor
register "travel value after proximity dog ON".
The travel value in this range is stored in the monitor
register "home position return re-travel value".
Fig. 6.37 Home position return operation by the count type 3 (zero point no passing)
6 - 208
6 POSITIONING CONTROL
(3) Home position return execution
Home position return by the count type 3 is executed using the servo program in
Section 6.23.16.
(4) Cautions
(a) A system which the servomotor can rotate one time or more is required.
(b) After the proximity dog ON, when a servomotor rotates one time to reverse
direction after stop with travel value set in the "travel value after proximity
dog ON", make a system which does not turn OFF the external upper/lower
stroke limit.
(c) Home position return and continuously start of home position return are also
possible in the proximity dog ON in the count type 3.
When the home position return and continuously start of home position
return are executed in the proximity dog ON, the home position return is
executed after return the axis once to position of the proximity dog OFF.
(d) When the "travel value after proximity dog ON" is less than the deceleration
distance from "home position return speed" to "creep speed", a minor error
"an overrun occurred because the setting travel value is less than the
deceleration distance at the proximity dog signal input during home position
return of count type." (error code: 209) will occur and deceleration stop is
made.
(e) When "1 : Not need to pass motor Z phase after the power supply is
switched on" is selected in the "function selection C-4" of servo parameter
(expansion setting parameter), even if it does not pass zero point at the
servo amplifier power ON, the zero pass signal (M2406+20n) turns ON. This
operation is the same as count type 1.
(f) If in-position signal (M2402+20n) does not turn ON, home position return is
not ended.
6 - 209
6 POSITIONING CONTROL
6.23.7 Home position return by the data set type 1
(1) Data set type 1
The proximity dog is not used in this method for the absolute position system.
(2) Home position return by the data set type 1
Home position is the command position at the home position return operation.
The address at the home position
return operation is registered
as the home position address.
t
Home position return
by the servo program
start instruction
Fig. 6.38 Home position return operation by the date set type 1
(3) Home position return execution
Home position return by the data set type 1 is executed using the servo program
in Section 6.23.16.
(4) Cautions
(a) A zero point must be passed (zero pass signal: M2406+20n ON) between
turning ON the power supply and executing home position return.
If home position return is executed without passing a zero point once, "no
zero point passed error" occurs. If "no zero point passed error" occurred,
perform the home position return again, after reset the error and turn the
servomotor at least one revolution by the JOG operation.
The zero point passing can be confirmed with the zero pass signal
(M2406+20n). However, when "1 : Not need to pass motor Z phase after the
power supply is switched on" is selected in the "function selection C-4" of
servo parameter (expansion setting parameter), even if it does not pass zero
point at the servo amplifier power ON, the home position return is possible
because the zero pass signal (M2406+20n) turns ON.
(b) Home position return is started by the data set type 1 when the absolute
position system does not support, it becomes same function as the current
value change command.
(c) The home position return data required for the data set type 1 are the home
position return direction and home position address.
(d) If in-position signal (M2402+20n) does not turn ON, home position return is
not ended.
6 - 210
6 POSITIONING CONTROL
6.23.8 Home position return by the data set type 2
(1) Data set type 2
The proximity dog is not used in this method for the absolute position system.
(2) Home position return by the data set type 2
Home position is the real position of servomotor at the home position return
operation.
Machine travel range
Real position of
machine at the home
position return start
Home position return
by servo program
start instruction
Command position
at the home position
return start
Home position is the
real position at the
home position return
Fig. 6.39 Home position return operation by the date set type 2
(3) Home position return execution
Home position return by the data set type 2 is executed using the servo program
in Section 6.23.16.
(4) Cautions
(a) A zero point must be passed (zero pass signal: M2406+20n ON) between
turning on the power supply and executing home position return.
If home position return is executed without passing a zero point once, "no
zero point passed error" occurs. If "no zero point passed error" occurred,
perform the home position return again, after reset the error and turn the
servomotor at least one revolution by the JOG operation.
The zero point passing can be confirmed with the zero pass signal
(M2406+20n). However, when "1 : Not need to pass motor Z phase after the
power supply is switched on" is selected in the "function selection C-4" of
servo parameter (expansion setting parameter), even if it does not pass zero
point at the servo amplifier power ON, the home position return is possible
because the zero pass signal (M2406+20n) turns ON.
(b) The home position return data required for the data set type 2 are the home
position return direction and home position address.
6 - 211
6 POSITIONING CONTROL
6.23.9 Home position return by the dog cradle type
(1) Dog cradle type
After deceleration stop by the proximity dog ON, if the zero point is passed after
traveling to reverse direction and turning the proximity dog OFF, the deceleration
stop is made. And it moves to direction of home position return again with creep
speed and the first zero point after proximity dog ON is home position in this
method.
(2) Home position return by the dog cradle type
Operation of home position return by the dog cradle type for setting the proximity
dog in the home position return direction is shown below.
Acceleration time Deceleration time
V
Home position
return direction
1) It travels to preset direction of home
position return with the home position return
speed, and a deceleration stop is made by
the proximity dog ON.
2) After a deceleration stop, it travels to
reverse direction of home position return
with the home position return speed.
3) If the zero point is passed by the proximity
dog OFF, a deceleration stop is made.
4) After a deceleration stop, it travels to
direction of home position return with the
creep speed, the home position return ends
with first zero point after the proximity dog
ON.
Home position
return speed
1)
Creep speed
4)
Home position
return start
Home position
3)
2)
The travel value in this range is stored in the monitor
register "home position return re-travel value".
The travel value in this range is stored in the monitor
register "travel value after proximity dog ON".
ON
Proximity dog
Zero point
Fig. 6.40 Home position return operation by the dog cradle type
(3) Home position return execution
Home position return by the dog cradle type is executed using the servo program
in Section 6.23.16.
(4) Cautions
(a) When home position return retry function is not set, if home position return is
executed again after home position return end, a minor error "home position
return completion signal is turning ON at the dog cradle type home position
return start" (error code: 115) will occur, the home position return is not
executed.
6 - 212
6 POSITIONING CONTROL
(b) If the home position return is executed in the proximity dog, it travels to
reverse direction of home position return. If proximity dog turns OFF, a
deceleration stop is made, it travels to direction of home position return
again with the creep speed and the first zero point after proximity dog ON is
home position.
Acceleration time Deceleration time
V
Home position
return direction
1) It travels to preset reverse direction
of home position return with the
home position return speed.
2) If the zero point is passed by the
proximity dog OFF, a deceleration
stop is made.
3) After a deceleration stop, it travels
to direction of home position return
with the creep speed, and the home
Creep speed
position return ends with first zero
3)
point after the proximity dog ON.
Home
position
2)
Home position
return start
1)
Proximity dog
Zero point
6 - 213
6 POSITIONING CONTROL
(c) When the proximity dog is set in the home position return direction, the
proximity dog is turned OFF during travel to reverse direction of home
position return, and the zero point is not passed, it continues to travel in the
reverse direction of home position return with home position return speed
until the zero point is passed. The zero point is passed again during
deceleration by zero point pass, the home position becomes this side
compared with the case to pass zero point at the time of the proximity dog
OFF.
1) It travels to preset direction of home
position return with the home position
return speed.
2) A deceleration stop is made by the
proximity dog ON.
3) After a deceleration stop, it travels to
reverse direction of home position return
with the home position return speed.
4) If the zero point is passed by the
Home position
proximity dog OFF, a deceleration stop
return speed
is made.
5) After a deceleration stop, it travels to
direction of home position return with the
creep speed, and the home position
2)
return ends with first zero point after the
Creep speed
proximity dog ON.
Acceleration time Deceleration time
V
Home position
return direction
1)
5)
Home position
return start
4)
Home position
return speed
Home position
3)
Proximity dog
Zero point
6 - 214
6 POSITIONING CONTROL
(d) When it starts in the proximity dog, the zero point is not passed at the time of
the proximity dog is turned OFF during travel to reverse direction of home
position return, it continues to travel with home position return speed until
the zero point is passed. The zero point is passed again during deceleration
by zero point pass, the home position becomes this side compared with the
case to pass zero point at the time of the proximity dog OFF.
Acceleration time Deceleration time
V
Home position
return direction
Creep speed
3)
1) It travels to preset reverse direction of
home position return with the home
position return speed.
2) If the zero point is passed by the
proximity dog OFF, a deceleration
stop is made.
3) After a deceleration stop, it travels to
direction of home position return with
the creep speed, and the home
position return ends with first zero
point after the proximity dog ON.
Home position
1)
2)
Home position
return speed
Home position
return start
Proximity dog
Zero point
6 - 215
6 POSITIONING CONTROL
(e) If the zero point is passed during deceleration, the nearest zero point from
deceleration stop position to home position return direction is set as the
home position.
Acceleration time Deceleration time
V
Home position
return direction
1) It travels to preset direction of home
position return with the home position return
speed, and a deceleration stop is made by
the proximity dog ON.
2) After a deceleration stop, it travels to
reverse direction of home position return
with the home position return speed.
3) If the zero point is passed by the proximity
dog OFF, a deceleration stop is made. (The
zero point is passed during deceleration.)
4) After a deceleration stop, it travels to the
nearest zero point of home position return
direction with the creep speed, and the
home position return ends.
Home position
return speed
1)
Creep speed
4)
Home position
return start
Home position
3)
2)
The travel value in this range
is stored in the monitor register
"home position return re-travel
value".
ON
The travel value in this range is stored in the monitor
register "travel value after proximity dog ON".
Proximity dog
Zero point
6 - 216
6 POSITIONING CONTROL
6.23.10 Home position return by the stopper type 1
(1) Stopper type 1
Position of stopper is home position in this method.
It travels to the direction set in the "home position return direction" with the "home
position return speed", after a deceleration starts by proximity dog OFF to ON
and it presses against the stopper and makes to stop with the torque limit value
set in the "torque limit value at the creep speed" and "creep speed" of home
position return data. Real position of servomotor at the time of detection for
turning the torque limiting signal OFF to ON is home position.
Torque limit value after reaching creep speed is set in the "torque limit value at
the creep speed" of home position return data.
(2) Home position return by the stopper type 1
Operation of home position return by the stopper type 1 is shown below.
V
Home position
return direction
Home position
return speed
Real position of servomotor
at this point is home position.
Stopper
Creep speed
t
Home position
return start
Torque limit
value
Time which stops rotation of
servomotors forcibly by the
stopper
Torque limit value of
parameter block at the home
position return
Home position return data
"torque limit value at the
creep speed"
Proximity dog
ON
Torque limiting OFF
signal
(M2416+20n)
(Note): "Travel value after proximity dog ON" storage register becomes "0" at the
home position return start.
Fig. 6.41 Home position return operation by the stopper type 1
(3) Home position return execution
Home position return by the stopper type 1 is executed using the servo program
in Section 6.23.16.
6 - 217
6 POSITIONING CONTROL
(4) Cautions
(a) A zero point does not must be passed (zero pass signal: M2406+20n ON)
between turning on the power supply and executing home position return.
(b) Home position return retry function cannot be used in the stopper type 1.
(c) Set the torque limit value after reaching the creep speed for system.
When the torque limit value is too large, servomotors or machines may be
damaged after pressing the stopper. Also, when the torque limit value is too
small, it becomes the torque limiting before pressing the stopper and ends
the home position return.
(d) If the home position return is executed again after home position return
completion, a minor error "home position return completion signal is turning
ON at the stopper type home position return start" (error code: 115) will
occur, the home position return is not executed.
(e) Home position return is started during the proximity dog ON, it is started
from the "creep speed".
6 - 218
6 POSITIONING CONTROL
6.23.11 Home position return by the stopper type 2
(1) Stopper type 2
Position of stopper is home position in this method.
It travels the direction set in the "home position return direction" with the "creep
speed", and it presses against the stopper and makes to stop with the "creep
speed". (The torque limit value is valid set in the "torque limit value at the creep
speed" of the home position return data from the home position return start.)
Real position of servomotor at the time of detection for turning the torque limiting
signal OFF to ON is home position.
Torque limit value after reaching creep speed is set in the "torque limit value at
the creep speed" of home position return data.
(2) Home position return by the stopper type 2
Operation of home position return by the stopper type 2 is shown below.
V
Stopper
Home position
return direction
Creep speed
Real position of servomotor
at this point is home position.
t
Home position
return start
Torque limit
value
Torque limiting
signal
(M2416+20n)
Time which stops rotation of servomotors
forcibly by the stopper
Home position return data "torque limit value at the creep speed"
ON
OFF
(Note): "Travel value after proximity dog ON" storage register becomes "0" at the
home position return start.
Fig. 6.42 Home position return operation by the stopper type 2
(3) Home position return execution
Home position return by the stopper type 2 is executed using the servo program
in Section 6.23.16.
(4) Cautions
(a) A zero point does not must be passed (zero pass signal: M2406+20n ON)
between turning on the power supply and executing home position return.
(b) Home position return retry function cannot be used in the stopper type 2.
6 - 219
6 POSITIONING CONTROL
(c) Set the torque limit value at the reaching creep speed for system.
When the torque limit value is too large, servomotors or machines may be
damaged after pressing the stopper. Also, when the torque limit value is too
small, it becomes the torque limiting before pressing the stopper and ends
the home position return.
(d) If the home position return is executed again after home position return
completion, a minor error "home position return completion signal is turning
ON at the stopper type home position return start" (error code: 115) will
occur, the home position return is not executed.
6 - 220
6 POSITIONING CONTROL
6.23.12 Home position return by the limit switch combined type
(1) Limit switch combined type
The proximity dog is not used in this method. Home position return can be
executed by using the external upper/lower limit switch.
When the home position return is started, it travels to direction of home position
return with "home position return speed". Deceleration is made by turning the
limit switch of home position return direction ON to OFF, it travels to reverse
direction of home position return with creep speed, and the zero point just before
limit switch is home position.
(2) Home position return by the limit switch combined type
Operation of home position return by limit switch combined type for setting the
limit switch in the home position return direction is shown below.
1) It travels to preset direction of home
position return with the home
position return speed.
2) A deceleration stop is made by the
external limit switch ON to OFF.
3) After a deceleration stop, it travels to
reverse direction of home position
return with the creep speed, and the
2)
home position return ends with the
zero point just before limit switch.
Acceleration time Deceleration time
V
Home position
return direction
Home position
return start
1)
Home position
return speed
Home position
3)
Creep speed
External limit switch
(Indicates with normally closed contact)
Zero point
The travel value in this range is stored in the
monitor register "travel value after proximity dog
ON".
The travel value in this range is stored in the
monitor register "home position return re-travel
value".
Fig. 6.43 Home position return operation by the limit switch combined type
(3) Home position return execution
Home position return by the limit switch combined type is executed using the
servo program in Section 6.23.16.
6 - 221
6 POSITIONING CONTROL
(4) Cautions
(a) For the axis which executes the home position return by the limit switch
combined type, if the external input signal has not set in the system settings,
a minor error "the positioning control which use the external input signal was
executed for the axis which has not set the external input signal in the
system settings" (error code: 142) will occur and home position return is not
executed.
(b) When the limit switch reverse to home position return direction is turned ON
to OFF, deceleration stop is made, home position return is not completed
and a major error "external limit switch detection error" (error code : 1101,
1102) will occur.
(c) Home position return retry function cannot be used in the limit switch
combined type.
(d) If the home position return is executed with the limit switch OFF, it is started
to reverse direction of home position return with creep speed.
(e) When it does not pass (zero pass signal: M2406+20n ON) the zero point
from home position return start to deceleration stop by limit switch OFF, a
minor error "ZCT not set" (error code: 120) will occur, a deceleration stop is
made and home position return does not end normally. However, when "1 :
Not need to pass motor Z phase after the power supply is switched on" is
selected in the "function selection C-4" of servo parameter (expansion
setting parameter), if the zero point is not passed until from home position
return start to deceleration stop by limit switch OFF, the home position return
can be executed.
(f) Deceleration stop is executed after the limit switch OFF. Set the limit switch
in expectation of deceleration distance.
(g) If the in-position signal (M2402+20n) is turned ON, home position return is
not ended.
(h) When the width is in a zero point, the home position differs from the home
position return by the proximity dog type 1, proximity dog type 2, count type
1, count type 3 and dog cradle type.
6 - 222
6 POSITIONING CONTROL
6.23.13 Home position return retry function
When a work has been exceeded home position during positioning control, etc., even if
it executes the home position return, depending on the position of work, a work may
not travel to home position direction. In this case, a work is normally travelled before
the proximity dog by the JOG operation, etc, and the home position return is started
again. However, by using the home position return retry function, even if a work is
where, the home position return can be executed.
Refer to Section 6.23.1(7) for home position return method by using the home position
return retry function.
[Data Setting]
When the "home position return retry function" is used, set the following "home position
return data" using MT Developer.
Set the "dwell time at the home position return retry" as required.
Set the parameters for every axis.
Table 6.4 Home position return data
Setting details
Setting
value
Initial value
0 : Invalid (Do not execute the home position
return retry by limit switch.)
1 : Valid (Execute the home position return
retry by limit switch.)
0, 1
0
Items
Home position return
retry function
Dwell time at the home The stop time at the deceleration stop during 0 to 5000
position return retry
the home position return retry is set
[ms]
0
[Control details]
Operation for the home position return retry function is shown below.
(1) Home position return retry operation setting a work within the range of external
limit switch
Acceleration time Deceleration time
Home position
return direction
5)
4)
1)
6)
Home
position
2)
Home position
return start
3)
External limit switch
Proximity dog
1) It travels to preset direction of
home position return.
2) If the external upper/lower
limit switch turns OFF before
the detection of proximity dog,
a deceleration stop is made.
3) After a deceleration stop, it
travels to reverse direction of
home position return with the
home position return speed.
4) A deceleration stop is made by
the proximity dog OFF.
5) After a deceleration stop, it
travels to direction of home
position return.
6) Home position return ends.
Zero point
Fig. 6.44 Operation for home position return retry (proximity dog type)
6 - 223
6 POSITIONING CONTROL
(2) Home position return retry operation setting a work outside the range of external
limit switch
(a) When the direction of "work home position" and home position return is
same, normal home position return is operated.
Direction of "work
home position"
and home position return is same
Home position
return direction
Home position
return start
RLS
FLS
Home
position
Proximity dog
Zero
point
Travel range
(b) When the direction of "work home position" and home position return is
reverse, deceleration stop is made with the proximity dog OFF and home
position return is operated to preset direction of home position return.
1) It travels to preset reverse direction of home position
return with the home position return speed.
2) A deceleration stop is made by the proximity dog OFF.
3) After a deceleration stop, it travels to direction of home
position return, the home position return ends.
Direction of "work
home position"
and home position return is reverse
Home position
return direction
3)
2)
RLS
Home position
return start
Home
position
1)
FLS
Proximity dog
Zero
point
Travel range
6 - 224
6 POSITIONING CONTROL
(3) Dwell time setting at the home position return retry
Reverse operation by detection of the external upper/lower limit switch and dwell
time function at the home position return start after stop by proximity dog OFF
are possible with the dwell time at the home position return retry in the home
position return retry function.
Dwell time at the home position return retry becomes valid at the time of
deceleration stop of the following 2) and 4). (Dwell time operates with the same
value.)
The temporary stop is made during time
set in the "dwell time at the home
position return retry".
Home position
return direction
5)
1)
6)
Home
position
4)
2)
Home position
return start
3)
External limit switch
Proximity
dog
Zero
point
The temporary stop is made during time 1) It travels to preset direction of home position return.
set in the "dwell time at the home
2) If the external upper/lower limit switch turns OFF
position return retry".
before the detection of proximity dog, a deceleration
is made and the temporary stop is made during time
set in the "dwell time at the home position return
retry".
3) After a stop, it travels to reverse direction of home
position return with the home position return speed.
4) A deceleration is made by the proximity dog OFF
and the temporary stop is made during time set in
the "dwell time at the home position return retry".
5) After a stop, it travels to direction of home position
return.
6) Home position return ends. At this time, the "dwell
time at the home position return retry" is invalid.
Fig. 6.45 Dwell time setting at the home position return retry
[Cautions]
(1) Possible/not possible of home position return retry function by the home position
return method is shown below.
Home position return
methods
Proximity dog type
Count type
Data set type
Dog cradle type
Stopper type
Limit switch combined type
Possible/not possible of home position
return retry function
: Possible,
6 - 225
: Not possible
6 POSITIONING CONTROL
(2) Make a system for which does not execute the servo amplifier power off or servo
OFF by the external upper/lower limit switch. Home position return retry cannot be
executed only in the state of servo ON.
(3) Deceleration is made by detection of the external limit switch and travel to reverse
direction of home position return is started. In this case, a major error "external
limit switch detection error" (error codes: 1001, 1002, 1101, 1102) will not occur.
CAUTION
Be sure to set the external limit switch (FLS, RLS) in the upper/lower position of machines. If
the home position return retry function is used without external limit switch, servomotors
continue rotating.
6 - 226
6 POSITIONING CONTROL
6.23.14 Home position shift function
Normally, when the machine home position return is executed, a position of home
position is set by using the proximity dog or zero point signal. However, by using the
home position shift function, the position to which only the specified travel value was
travelled from the position which detected the zero point signal can be regarded as
home position.
Refer to Section 6.23.1(7) for home position return method by using the home position
shift function.
[Data Setting]
Set the following "home position return data" using MT Developer to use the "home
position shift function".
Set the parameters for every axis.
Table 6.5 Home position return data
Items
Home position
shift amount
Setting details
Setting value
Initial value
The shift amount at
the home position
shift is set.
-2147483648 to 2147483647
-1
-5
-5
[ 10 µm, 10 inch, 10 degree, PLS]
0
Speed set at the The speed at the
home position shift
home position
is set.
shift
6 - 227
0 : Home position return speed
1: Creep speed
0
6 POSITIONING CONTROL
[Control details]
(1) Home position shift operation
Operation for the home position shift function is shown below.
Home position shift amount is positive value
Address decrease
direction
Address increase
direction
Home position
return direction
Set the operation speed at
the home position shift with
speed set at the home
position shift.
Select one of "home
position return speed" or
"creep speed".
Home position
return speed
Creep speed
Home position
Home position
return start
Proximity dog
Home position shift amount
(Positive value)
Home position
return re-travel
value
Travel value after proximity dog ON
Zero point
Home position shift amount is negative value
Address decrease
direction
Address increase
direction
Home position
return speed
Home position
return direction
Home position
return start
Home position return re-travel value
Creep speed
Home position
Creep speed Travel value after
proximity dog ON
Home position
return speed
Proximity dog
Home position shift amount
(Negative value)
Set the operation speed at
the home position shift with
speed set at the home
position shift.
Select one of "home
position return speed" or
"creep speed".
Zero point
Fig. 6.46 Operation for home position shift
6 - 228
6 POSITIONING CONTROL
(2) Setting range of home position shift amount
Set the home position shift amount within the range of from the detected zero
signal to external upper/lower limit switch (FLS/RLS). If the range of external
upper/lower limit switch is exceeded, a major error "external limit switch detection
error" (error codes: 1102, 1103) will occur at that time and the home position
return is not ended.
Setting range of
negative home
position shift amount
Setting range of
positive home
position shift amount
Address
decrease
direction
RLS
Address
increase
direction
FLS
Proximity dog
Home position
return direction
Zero point
Fig. 6.47 Setting range of home position shift amount
(3) Travel speed at the home position shift
When the home position shift function is used, set the travel speed at the home
position shift as the speed set at the home position shift. Either the home position
return speed or creep speed is selected as the travel speed at the home position
shift.
The travel speed at the home position shift for the home position return by
proximity dog type is shown below.
(a) Home position shift operation with the "home position return speed"
V
Home position
return direction
Home position
return speed
Home position shift
amount is positive
Home position
Home position
Home position shift
amount is negative
Home position
return start
Proximity dog
Zero point
Fig. 6.48 Operation for home position shift with the home position return
speed
6 - 229
6 POSITIONING CONTROL
(b) Home position shift operation with the "creep speed"
V
Home position
return direction
Home position shift
amount is positive
Creep speed
Home position
Home position
Home position
return start
Proximity dog
Home position shift
amount is negative
Zero point
Fig. 6.49 Operation for home position shift with the creep speed
[Cautions]
(1) Valid/invalid of home position shift amount setting value by the home position
return method.
Home position return
methods
Proximity dog type
Count type
Data set type
Dog cradle type
Stopper type
Limit switch combined type
Valid/invalid of home position shift
amount
: Valid,
: Invalid
(2) Axis monitor devices and axis statuses are set after completion of home position
shift.
(3) When the home position return by proximity dog type set the travel value after
proximity dog ON and home position shift amount within the range of
-1
-5
-5
"-2147483648 to 2147483647" [ 10 µm, 10 inch, 10 degree, PLS].
6 - 230
6 POSITIONING CONTROL
6.23.15 Condition selection of home position set
A home position return must be made after the servomotor has been rotated more than
one revolution to pass the axis through the Z-phase (motor reference position signal)
and the zero pass signal (M2406+20n) has been turned ON.
When "1 : Not need to pass motor Z phase after the power supply is switched on" is
selected in the "function selection C-4, (PC17) Condition selection of home position
set" of servo parameter (expansion setting parameter), if it does not pass zero point
with the motor rotation after turning the servo amplifier power ON, the zero pass signal
(M2406+20n) can be turned ON.
[Data Setting]
Set the following "servo parameter" using MT Developer to select the "function
selection C-4".
Set the servo parameters for every axis.
Table 6.6 Servo parameter (expansion setting parameter)
Items
Function
selection C-4
(PC17)
Condition
selection of
home
position set
Setting details
Set the condition
selection of home
position set in the
absolute position
system.
Setting value
Initial value
0: Need to pass motor Z phase after the power
supply is switched on
1: Not need to pass motor Z phase after the power
supply is switched on
0
[Cautions]
(1) When "1 : Not need to pass motor Z phase after the power supply is switched on"
is set as the above servo parameter, a restrictions such as "make the home
position return after the servomotor is rotated more than one revolution to pass the
axis through the Z-phase (motor reference position signal) " is lost.
(2) When "1 : Not need to pass motor Z phase after the power supply is switched on"
is selected in the "function selection C-4" of servo parameter (expansion setting
parameter), if it does not pass zero point at the servo amplifier power ON, the zero
pass signal (M2406+20n) turns ON.
(3) When the above parameter is changed, turn the servo amplifier power OFF to ON
after resetting or turning power OFF to ON of Multiple CPU system.
CAUTION
Do not set the "1 : Not need to pass motor Z phase after the power supply is switched on" for
axis which executes the home position return again after it continues traveling the same
direction infinitely.
6 - 231
6 POSITIONING CONTROL
6.23.16 Servo program for home position return
The home position return executed using the ZERO servo instruction.
Items set using MT Developer
ZERO
Others
Program No.
Others
Speed change
S-curve ratio
Allowable error range for circular interpolation
Torque limit value
Deceleration time
Speed limit value
Acceleration time
Central point
Control unit
Radius
Auxiliary point
Torque limit value
M-code
Command speed
Dwell time
Address/travel value
Deceleration processing on stop input
Parameter block
Number of
controllable axes
Axis
Positioning method
Parameter block No.
Servo instruction
Arc
Rapid stop deceleration time
Common
1
: Must be set
[Control details]
(1) Home position return is executed by the home position return method specified
with the home position return data (Refer to Section 6.23.1).
Refer to the following sections for details of the home position return methods :
• Proximity dog type 1 ...................... Section 6.23.2
• Proximity dog type 2 ...................... Section 6.23.3
• Count type 1 ................................... Section 6.23.4
• Count type 2 ................................... Section 6.23.5
• Count type 3 ................................... Section 6.23.6
• Data set type 1 ............................... Section 6.23.7
• Data set type 2 ............................... Section 6.23.8
• Dog cradle type .............................. Section 6.23.9
• Stopper type 1................................ Section 6.23.10
• Stopper type 2................................ Section 6.23.11
• Limit switch combined type............ Section 6.23.12
[Program]
Servo program No. 0 for home position return is shown as the following conditions.
(1) System configuration
Home position return of Axis 4.
Motion CPU control module
Q61P Q03UD Q172D QX41
CPU
CPU
QY41 Q172D
LX
Home position return command (PX000)
AMP
Axis
1 M
AMP
Axis
2 M
6 - 232
AMP
Axis
3 M
AMP
Axis
4 M
6 POSITIONING CONTROL
(2) Servo program example
Servo program No. 0 for home position return is shown below.
<K
0>
ZERO
Axis
4
Home position return
Axis used . . . Axis 4
(3) Motion SFC program
Motion SFC program for which executes the servo program is shown below.
Home position return
Home position return
[F10]
Turn on all axes servo ON command.
SET M2042
[G10] PX000*M2475*M2462
[K0]
[G20]
Wait until PX000, Axis 4 servo ready and
in-position signal turn on.
(Note-1)
Home position return
Axis used . . . Axis 4
ZERO
Axis 4
Wait until PX000 turn off after home position
return completion.
!PX000
END
(Note-1) : It is necessary to turn on the zero pass signal before execution of the home position return
instruction for data set type home position return.
(Note-2) : Example of the above Motion SFC program is started using the automatic start or PLC program.
[Cautions]
If the home position is not within the in-position range of servo parameter, it does not
mean having reached the home position data and the home position return does not
end in the proximity dog type, count type, data set type 1, dog cradle type, or limit
switch combined type home position return. In this case, adjusts the in-position range
of servo parameter or position control gain.
6 - 233
6 POSITIONING CONTROL
6.24 High-Speed Oscillation
Positioning of a specified axis is caused to oscillate on a sine wave.
Items set using MT Developer
OSC
Others
1
WAIT-ON/OFF
Cancel
Speed change
S-curve ratio
Allowable error range for circular interpolation
Torque limit value
Deceleration time
Speed limit value
Acceleration time
Control unit
Frequency
Amplitude
Starting angle
Torque limit value
M-code
Command speed
Dwell time
Address/travel value
Deceleration processing on stop input
Parameter block
Number of
controllable axes
Axis
Positioning method
Parameter block No.
Servo instruction
OSC
Rapid stop deceleration time
Common
Invalid
: Must be set
: Set if required
[Control details]
The designated axis caused to oscillate on a specified sine wave.
Acceleration/deceleration processing is not performed.
360[degree]
Amplitude
Starting angle
(1) Amplitude
Set the amplitude of the oscillation in the setting units.
The amplitude can be set within the range of 1 to 2147483647.
(2) Starting angle
Set the angle on the sine curve at which oscillation is to start.
The setting range is 0 to 359.9 [degree]
(3) Frequency
Set how many sine curve cycles occur in one minute.
The setting range is 1 to 5000 [CPM].
POINT
Since acceleration/deceleration processing is not performed, you should set the
starting angle to 90 or 270 [degree] in order to avoid an abrupt start.
6 - 234
6 POSITIONING CONTROL
[Cautions]
(1) If the amplitude setting is outside the range, the servo program setting error [25]
occurs and operation does not start.
(2) If the starting angle setting is outside the range, the servo program setting error
[26] occurs and operation does not start.
(3) If the frequency setting is outside the range, the servo program setting error [27]
occurs and operation does not start.
(4) Operation is continually repeated until a stop signal is input after the start.
(5) Speed changes during operation are not possible. Attempted speed changes will
cause minor error [310].
[Program]
An example of a program for high-speed oscillation is shown below.
<K
6>
OSC
Axis
Starting angle
Amplitude
Frequency
6 - 235
1
90.0
1000
100
[degree]
[PLS]
[CPM]
6 POSITIONING CONTROL
MEMO
6 - 236
7 AUXILIARY AND APPLIED FUNCTIONS
7. AUXILIARY AND APPLIED FUNCTIONS
This section describes the auxiliary and applied functions for positioning control in the
Multiple CPU system.
7.1 M-code Output Function
M-code is a code No. between 0 and 32767 which can be set for every positioning
control. During positioning control, these M-codes are read using the Motion SFC
program to check the servo program during operation and to command auxiliary
operations, such as clamping, drill rotation and tool replacement.
(1) Setting of M-codes
M-code can be set using MT Developer at the creation and correction of the
servo program.
(2) Storage of M-code and read timing
(a) M-codes are stored in the M-code storage register of the axis specified with
the positioning start completion and specified points (at the speed switching
control or constant-speed control).
During interpolation control, the M-codes are stored in all axes which
perform interpolation control.
(b) When the M-code is read at the positioning start completion, use the
positioning start complete signal (M2400+20n) as the reading command.
7
7-1
7 AUXILIARY AND APPLIED FUNCTIONS
(c) When the M-code is read at positioning completion, use the positioning
complete signal (M2401+20n) as the read command.
At the position control or speed control
V
Dwell time
t
ON
OFF
PLC ready flag (M2000)
ON
ON
Servo program start
Start accept flag (M2001+n) OFF
Positioning start complete
signal (M2400+20n)
OFF
Positioning complete
signal (M2401+20n)
OFF
ON
M-code
Storage of setting M-code No.
At the speed switching control
V
P1 (Speed-switching point)
P2 (Speed-switching point)
P3 (Stop)
t
ON
PLC ready flag (M2000)
OFF
Servo program start
ON
Start accept flag (M2001+n) OFF
ON
Positioning start complete
signal (M2400+20n)
OFF
Positioning complete
signal (M2401+20n)
OFF
ON
M-code
Storage of setting M-code No.
(3) Resetting of M-codes
M-codes can be reset by setting of the M-code output devices to zero.
Use this method during positioning control to perform operations unrelated to the
servo program, such as when it has been difficult to output the M-code during the
previous positioning control.
However, M-code is set55 during the speed switching control or constant-speed
control, the M-code output of the servo program takes priority.
7-2
7 AUXILIARY AND APPLIED FUNCTIONS
(4) Program example
(a) The Motion SFC program to read M-codes is shown as the following
conditions.
1) Axis used No. ......................................... Axis 3
2) Processing at the positioning start by M-code
.................... M-code No. is output as BCD
code to Y110 to Y11F
3) Processing at the positioning completion by M-code
a) M-code = 3......................................... Y120 turns on
b) M-code = 5......................................... Y121 turns on
c) M-code is except for (3 or 5) ............. Y122 turns on
(b) Motion SFC program with the above conditions are shown below.
System Configuration
Q61P Q03UD Q172D QY40 QY40 Q172D
CPU CPU
LX
PY000 PY010
to
to
PY00F PY01F
Motion SFC program
Reading of M-codes
[F10]
1)
#0=0
#1=0
#2=0
[F20]
SET M2042
All axes servo ON command
turns on
[G10]
PX000*M2455
Stand by until PX000 and Axis 3
servo ready turns on
[K100] CPSTART1
Axis
Speed
INC-1
Axis
M-code
INC-1
Axis
M-code
INC-1
Axis
M-code
CPEND
[G30]
D53==5
[F40]
#1=BCD(D53)
DOUT Y110, #1
SET Y121
[G40]
(D53==3)+(D53==5)
1 axis constant-speed control
3
1000PLS/s
3,
200000PLS
3
3,
300000PLS
5
3,
400000PLS
4
P0
[G20]
D53==3
[F30]
#0=BCD(D53)
DOUT Y110, #0
SET Y120
Axis used . . . Axis 3
Speed . . . 1000PLS/s
1 axis linear positioning control
Axis used . . . Axis 3
Positioning . . . 200000PLS
address
M-code output . . . 3
1 axis linear positioning control
Axis used . . . Axis 3
Positioning . . . 300000PLS
address
M-code output . . . 5
1 axis linear positioning control
Axis used . . . Axis 3
Positioning . . . 400000PLS
address
M-code output . . . 4
After M-code storage
area for axis 3 is
changed into BCD code,
it is output to Y110 and
Y122 turns on.
[F50]
[G50]
After M-code storage area for axis 3
is changed into BCD code, it is output
to Y110 and Y120 turns on.
7-3
After M-code storage area for
axis 3 is changed into BCD code,
it is output to Y110 and Y121
turns on.
M-code (except 3 or 5) for axis 3 ?
M-code (3) for axis 3 ?
1)
M-code (5) for axis 3 ?
!M2003
#2=BCD(D53)
DOUT Y110, #2
SET Y122
P0
END
7 AUXILIARY AND APPLIED FUNCTIONS
7.2 Backlash Compensation Function
This function compensates for the backlash amount in the machine system. When the
backlash compensation amount is set, extra feed pulses equivalent to the backlash
compensation amount set up whenever the travel direction is generated at the
positioning control, JOG operation or manual pulse generator operation.
Feed screw
Workpiece
Backlash compensation amount
Fig.7.1 Backlash compensation amount
(1) Setting of the backlash compensation amount
The backlash compensation amount is one of the fixed parameters, and is set for
each axis using MT Developer.
The setting range differs according to whether [mm], [inch], [degree] or [PLS]
units are used as shown below.
(a) [mm] units
• 0 to 6553.5
(Backlash compensation amount)
65535[PLS]
•0
(Travel value per PLS)
(Decimal fraction rounded down)
(b) [inch] or [degree] units
• 0 to 0.65535
(Backlash compensation amount)
•0
(Travel value per PLS)
65535[PLS]
(Decimal fraction rounded down)
(c) [PLS] units
• 0 to 65535
•0
(Backlash compensation amount)
(PLS per rotation)
65535[PLS]
(Travel value per rotation)
(Decimal fraction rounded down)
7-4
7 AUXILIARY AND APPLIED FUNCTIONS
(2) Backlash compensation processing
Details of backlash compensation processing are shown below.
Table 7.1 Details of backlash compensation processing
Condition
Processing
• If travel direction is equal to home position return direction, the
First start after power on
backlash compensation is not executed.
• If travel direction is not equal to home position return direction, the
backlash compensation is executed.
JOG operation start
Positioning start
Manual pulse generator
operation
Home position return
completion
Absolute position system
• If travel direction is changed at the JOG operation start, the
backlash compensation is executed.
• If travel direction is changed, the backlash compensation is
executed.
• If travel direction is changed, the backlash compensation is
executed.
• The backlash compensation is executed after home position return
completion.
• Status stored at power off and applied to absolute position system.
POINTS
(1) The feed pulses of backlash compensation amount are added to the feed
current value.
(2) When the backlash compensation amount is changed, the home position
return is required.
When the home position return is not executed, the original backlash
compensation amount is not changed.
7-5
7 AUXILIARY AND APPLIED FUNCTIONS
7.3 Torque Limit Function
This function restricts the generating torque of the servomotor within the setting range.
If the torque required for control exceeds the torque limit value during positioning
control, it restricts with the setting torque limit value.
(1) Setting range of the torque limit value
It can be set within the range of 1 to 1000[%] of the rated torque.
(2) Setting method of torque limit value
Set the torque limit value is shown below.
(a) Setting in the parameter block (Refer to Section 4.3).
Set the torque limit value in the parameter block.
By setting the parameter block No. used in the servo program, it can be
restricted the generating torque of the servomotor within the specified torque
limit value for every positioning control.
(b) Setting in the servo program
By setting the torque limit value in the servo program, it can be restricted the
generating torque of the servomotor within the specified torque limit value at
the execution of the servo program.
(c) Setting in the Motion SFC program
By executing the torque limit value change request (CHGT) in the Motion
SFC program or operating control step, it can be set the generating torque of
the servomotor within the specified torque control value.
(Refer to the "Q173DCPU/Q172DCPU Motion controller (SV13/SV22)
Programming Manual (Motion SFC)" for details.
7-6
7 AUXILIARY AND APPLIED FUNCTIONS
Example
Setting for the torque limit value with the constant-speed control (CPSTART 1)
(1) Servo program
Parameter block 3 (P.B.3)
setting at the start
Setting items of the
parameter block
Torque limit value setting
from the pass point (P1)
(2) Parameter block
Torque limit value
setting
(3) Operation description
Constant-speed control
V1
P1
P2
0
Torque limit to
the servo amplifier
40000
300[%]
Torque control with
torque limit value
(300[%]) of the parameter
block 3 (P.B.3).
7-7
60000
50[%]
Torque control with
torque limit value
(50[%]) of the servo
program.
Parameter block or torque limit
value specified with the servo
program at the start.
7 AUXILIARY AND APPLIED FUNCTIONS
7.4 Skip Function in which Disregards Stop Command
When the current positioning is stopped by input from external source and the next
positioning control is performed, it enables starting of the next positioning control even
if the input from external source is on (continuation).
There are following tow functions in the function called "Skip".
• Skip during CP command (Refer to Section "6.17.6 Pass point skip function".)
• Skip in which disregards stop command
] occurs with the servo program start during the
Usually, although an error [
STOP signal on, if M3209+20n turns on and the servo program starts, the next servo
program starts even if during the STOP signal on.
(1) The procedure for the skip function by the external STOP signal and Motion SFC
program is shown below.
Start
Positioning start using the
servo program
. . . . . . . Positioning does not start if the STOP signal,
stop command (M3200+20n) or rapid stop
command (M3201+20n) turns on.
Turn on the external STOP
signal at the positioning stop
Turn on the external stop input
disable at start command
(M3209+20n)
. . . . . . . Turn M3209+20n on to use the skip function.
(The external STOP signal becomes invalid at the
next positioning start.)
If M3209+20n turns off, the external STOP signal
becomes valid, and if the STOP signal is input,
the positioning does not start.
Start the positioning using the
next servo program after
deceleration stop
End
7-8
. . . . . . . Confirm the operation stop with the start accept flag
(M2001 to M2032) turns off.
7 AUXILIARY AND APPLIED FUNCTIONS
(2) Operation timing
The operation timing for the skip function is shown below.
V
Positioning
start to
point A
Positioning to point A
Deceleration stop by STOP input
A
Positioning start of the next servo
program by skip function
ON
PLC ready flag (M2000)
All axes servo ON
command (M2042)
Servo program start
External STOP signal
(The external STOP signal is ignored
during M3209+20n is on.)
t
OFF
ON
OFF
OFF
ON
ON
OFF
Turn on before the next positioning start.
ON
External stop input disable OFF
at start (M3209+20n)
7-9
7 AUXILIARY AND APPLIED FUNCTIONS
7.5 Cancel of the Servo Program
This function performs a deceleration stop of executing servo program during
execution by turning on the cancel signal.
[Control details]
(1) When the cancel signal is turned on during execution of a program for which the
cancel has been specified, the positioning processing is suspended, and a
deceleration stop is executed.
[Data setting]
(1) Cancel signal device
The usable cancel signal devices are shown below.
X, Y, M, B, F, U \G
[Note]
(1) This function cannot be used in the home position return instruction (ZERO) or
simultaneous start instruction (START).
For details on whether other instructions can be used or not, refer to the servo
instruction list (5.2(2)).
[Operation timing]
The operation timing for deceleration stop is shown below.
V
Execution of servo program No. K0
Deceleration stop by turning the cancel signal on
Positioning
start
to point A
A
t
ON
PLC ready flag (M2000)
OFF
ON
OFF
All axes servo ON
command (M2042)
ON
OFF
Cancel signal
[Program example]
Motion SFC program is shown bellow.
<K
0>
ABS-1
Axis
Speed
Cancel
1,
7 - 10
30000
5000
X0000
Cancel signal . . . . X0000
7 AUXILIARY AND APPLIED FUNCTIONS
7.5.1 Cancel/start
When a cancel/start has been set in the setting items of the servo program which
was started at the motion control step of the Motion SFC program, the cancel of the
running servo program is valid but the servo program specified to start after a
cancel is ignored, without being started.
Example of the Motion SFC program which executed control equivalent to a cancel
start is shown below.
K0
G0
Selective branch
G1
Providing transition G1 with cancel device condition specified
with servo program K0 will cancel to execute of servo program
K0 and allow servo program K1 to start.
K1
7 - 11
7 AUXILIARY AND APPLIED FUNCTIONS
MEMO
7 - 12
APPENDICES
APPENDICES
APPENDIX 1 Error Codes Stored Using The Motion CPU
The servo program setting errors and positioning errors are detected in the Motion
CPU side.
(1) Servo program setting errors
These are positioning data errors set in the servo program, and it checks at the
start of the each servo program.
They are errors that occur when the positioning data is specified indirectly.
The operations at the error occurrence are shown below.
• The servo program setting error flag (SM516) turns on.
• The erroneous servo program is stored in the error program No. storage register
(SD516).
• The error code is stored in the error item information register (SD517).
(2) Positioning error
(a) Positioning errors occurs at the positioning start or during positioning control.
There are minor errors, major errors and servo errors.
1) Minor errors…… These errors occur in the Motion SFC program or servo
program, and the error codes 1 to 999 are used.
Check the error code, and remove the error cause by
correcting the Motion SFC program or servo program.
2) Major errors…… These errors occur in the external input signals or
control commands from the Motion SFC program, and
the error codes 1000 to 1999 are used.
Check the error code, and remove the error cause of
the external input signal state or Motion SFC program.
3) Servo errors ..… These errors detected in the servo amplifier, and the
error codes 2000 to 2999 are used.
Check the error code, and remove the error cause of
the servo amplifier side.
APP - 1
APP.
APPENDICES
(b) The error detection signal of the erroneous axis turns on at the error
occurrence, and the error codes are stored in the minor error code, major
error code or servo error code storage register.
Table 1.1 Error code storage registers, error detection signals
Device
Error code storage register
Axis Axis Axis Axis Axis Axis Axis Axis Axis Axis Axis Axis Axis Axis Axis Axis
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
Error class
Error
detection
signal
Minor error
D6
D26
D46
D66
D86 D106 D126 D146 D166 D186 D206 D226 D246 D266 D286 D306
Major error
D7
D27
D47
D67
D87 D107 D127 D147 D167 D187 D207 D227 D247 D267 D287 D307
Servo error
D8
D28
D48
D68
D88 D108 D128 D148 D168 D188 D208 D228 D248 D268 D288 D308 M2408+20n
Device
Error code storage register
M2407+20n
Error
detection
signal
Error class
Axis Axis Axis Axis Axis Axis Axis Axis Axis Axis Axis Axis Axis Axis Axis Axis
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
Minor error
D326 D346 D366 D386 D406 D426 D446 D466 D486 D506 D526 D546 D566 D586 D606 D626
Major error
D327 D347 D367 D387 D407 D427 D447 D467 D487 D507 D527 D547 D567 D587 D607 D627
Servo error
D328 D348 D368 D388 D408 D428 D448 D468 D488 D508 D528 D548 D568 D588 D608 D628 M2408+20n
M2407+20n
(Note): The range of axis No. 1 to 8 is valid in the Q172DCPU.
(c) If another error occurs after an error code has been stored, the existing error
code is overwritten, deleting it.
However, the error history can be checked using MT Developer.
(d) Error detection signals and error codes are held until the error code reset
command (M3207+20n) or servo error reset command (M3208+20n) turns
on.
POINTS
(1) Even if the servo error reset (M3208+20n) turns on at the servo error
occurrence, the same error code might be stored again.
(2) Reset the servo error after removing the error cause of the servo amplifier side
at the servo error occurrence.
APP - 2
APPENDICES
APPENDIX 1.1 Servo program setting errors (Stored in SD517)
The error codes, error contents and corrective actions for servo program setting errors
are shown in Table 1.2.
In the error codes marked with "Note" indicates the axis No. (1 to 32).
Table 1.2 Servo program setting error list
Error code
stored in SD517
1
n03
(Note)
Error name
Error contents
Error processing
Parameter block No. The parameter block No. is outside Execute the servo program
setting error
the range of 1 to 64.
with the default value "1" of
parameter block.
(1) Positioning control does
Address (travel
(1) The address is outside the
not start. (All interpolation
value) setting error
setting range at the positioning
control at the interpolation
(Except the speed
start for absolute data method.
control.)
control and
(2) If the error is detected
speed/position
Unit Address setting range
during the speedcontrol.)
0 to
10–5
switching control or
(Setting error for
degree
35999999 [degree]
constant-speed control, a
linear axis at the
deceleration stop is
helical-interpolation.)
made.
(2) The travel value is set to
-2147483648 (H80000000) at (3) If an error occurs in one
servo program, all servo
the positioning start for
programs do not execute
incremental data method.
during the simultaneous
start.
Command speed
(1) The command speed is outside (1) Positioning control does
error
not start if the command
the range of 1 to the speed
speed is "0" or less.
limit value.
(2) The command speed is outside (2) If the command speed
exceeds the speed limit
the setting range.
value, control with the
speed limit value.
Unit
Speed setting range
Corrective action
Set the parameter block No.
within the range of 1 to 64.
(1) If the control unit is
[degree], set the address
within the range of 0 to
35999999.
(2) Set the travel value within
the range of "0 to (231-1)".
Set the command speed within
the range of 1 to the speed
limit value.
1 to
10-2
600000000 [mm/min]
1 to
10-3
inch
600000000 [inch/min]
10-3
1 to
[degree
degree
2147483647
/min]
mm
4
(Note-1)
PLS
5
6
7
Dwell time setting
error
1 to
2147483647
[PLS/s]
The dwell time is outside the
range of 0 to 5000.
M-code setting error The M-code is outside the range
of 0 to 32767.
Torque limit value The torque limit value is outside
setting error
the range of 1 to 1000.
(Note-1): When the "speed control 10
21474836.47 [degree/min].
Control with the default value Set the dwell time within the
"0".
range of 0 to 5000.
Control with the torque limit
value of the specified
parameter block.
Set the M-code within the
range of 0 to 32767.
Set the torque limit value
within the range of 1 to 1000.
multiplier setting for degree axis" is set to "valid", the setting range is 0.01 to
APP - 3
APPENDICES
Table 1.2 Servo program setting error list (Continued)
Error code
stored in SD517
n08
n09
n10
(Note)
(Note)
(Note)
11
12
13
14
Error name
Auxiliary point
setting error
(At the auxiliary
point-specified
circular
interpolation. )
(At the auxiliary
point-specified
helical
interpolation.)
Error contents
Error processing
Positioning control does not (1) If the control unit is
(1) The auxiliary point address is
start.
outside the setting range at the
[degree], set the auxiliary
positioning start for absolute data
point address within the
method.
range of 0 to 35999999.
Unit
degree
Address setting range
0 to
35999999
10-5
[degree]
(2) Set the auxiliary point
address within the range of
0 to (231-1).
(2) The auxiliary point address is set
to -2147483648 (H80000000) at
the positioning start for
incremental data method.
Radius setting error (1) The radius is outside the setting
range at the positioning control
(At the radiusfor absolute data method.
specified circular
interpolation.)
(At the radiusUnit Address setting range
specified helical
0 to
10-5
degree
interpolation.)
35999999 [degree]
(1) If the control unit is
[degree], set the radius
within the range of 0 to
35999999.
(2) Set the radius within the
range of 1 to (231-1).
(2) The radius is set to "0" or
negative setting at the
positioning start for incremental
data method.
Central point setting (1) The central point address is
error
outside the setting range at the
(At the central pointpositioning start for absolute data
specified circular
method.
interpolation.)
(At the central pointUnit Address setting range
specified helical
0 to
10-5
degree
interpolation.)
35999999 [degree]
(2) The central point is set to
-2147483648 (H80000000) at
the positioning start for
incremental data method.
Interpolation control The interpolation control unit is set
unit setting error
outside the range of 0 to 3.
Speed limit value
The speed limit value is set outside
setting error
the setting range.
Acceleration time
setting error
FIN acceleration/
deceleration setting
error
Fixed position stop
acceleration/
deceleration time
setting error
Deceleration time
setting error
Corrective action
The acceleration time is set to "0".
The FIN acceleration/deceleration
time is set except 1 to 5000.
The fixed position stop acceleration/
deceleration time is set to "0".
The deceleration time is set to "0".
APP - 4
(1) If the control unit is
[degree], set the central
point address within the
range of 0 to 35999999.
(2) Set the central point
address within the range of
0 to (231-1).
Control with the default
value "3".
Control with the default
value 200000[PLS/s].
Control with the default
value "1000".
Set the interpolation control
unit within the range of 0 to 3.
Set the speed limit value within
the setting range.
[For PLS]
1 to 2147483647[PLS/s]
Set the acceleration time
within the range of 1 to 65535.
The FIN acceleration/
deceleration time within the
range of 1 to 5000.
Set the fixed position stop
acceleration/deceleration time
within the range of 1 to 65535.
Set the deceleration time
within the range of 1 to 65535.
APPENDICES
Table 1.2 Servo program setting error list (Continued)
Error code
stored in SD517
15
16
17
Error name
Rapid stop
deceleration time
setting error
Torque limit value
setting error
Allowable error
range for circular
interpolation setting
error
Error contents
Unit
mm
inch
PLS
19
20
21
22
23
24
25
Corrective action
The rapid stop deceleration time is Control with the default value Set the rapid stop deceleration
set to "0".
"1000".
time within the range of 1 to
65535.
The torque limit value is outside
Control with the default value Set the torque limit value
the range of 1 to 1000.
"300[%]".
within the range of 1 to 1000.
The allowable error range for
Control with the default value Set the allowable error range
for circular interpolation within
circular interpolation is outside the "100[PLS]".
the setting range.
setting range.
degree
18
Error processing
Address setting range
[µm]
0 to
100000
10-5 [inch]
10-5
[degree]
[PLS]
Repeat count error The repeat count is outside the
range of 1 to 32767.
START instruction (1) The servo program specified
with the START instruction
setting error
does not exist.
(2) There is a START instruction in
the specified servo program.
(3) The starting axis of the
specified servo program
overlap.
Point setting error Point is not specified in the
instruction at the constant-speed
control.
Reference axis
The axis except interpolation axis
speed setting error is set as the reference axis at the
linear interpolation of the reference
axis speed-specified method.
S-curve ratio setting S-curve ratio is set outside the
error
range of 0 to 100[%] at the S-curve
acceleration/deceleration.
VSTART setting
Not even one speed-switching
error
point has been set between a
VSTART and VEND instruction, or
between FOR and NEXT
instruction.
Cancel function
The start program No. for the
start program No.
cancel function is set outside the
error
range 0 to 4095.
High-Speed
Operation cannot be started
oscillation
because the amplitude specified
command
with the high-speed oscillation
amplitude error
function is outside the range 1 to
2147483647.
APP - 5
Control the repeat count with Set the repeat count within the
"1".
range of 1 to 32767.
Positioning control does not (1) Create the servo program
specified with the START
start.
instruction.
(2) Delete the servo program
specified with the START
instruction.
(3) Do not overlap the starting
axis.
Set a point between CPSTART
and CPEND.
Set one of the interpolation
axes as the reference axis.
Control the S-curve ratio with Set the S-curve ratio within the
100[%].
range of 0 to 100[%].
Positioning control does not
start.
Set the speed switching point
between the VSTART and
VEND instructions or the FOR
and NEXT instructions.
Start after set the start
program No. within the range
of 0 to 4095.
Start after set the command
amplitude within the range of 1
to 214783647.
APPENDICES
Table 1.2 Servo program setting error list (Continued)
Error code
stored in D517
26
27
28
41
900
901
902
903
904
905
Error name
Error contents
Error processing
Positioning control does not
High-Speed
Operation cannot be started
start.
oscillation command because the starting angle
starting angle error specified with the high-speed
oscillation function is outside the
range of 0 to 3599
( 0.1[degrees]).
High-Speed
Operation cannot be started
oscillation command because the frequency specified
frequency error
with the high-speed oscillation
function is outside the range of 1
to 5000[CPM].
Number of helical
The specified number of pitches of
interpolation pitches helical interpolation is outside the
error
range of 0 to 999.
Device error of the Any unauthorized devices are set
home position return in the home position return data
data for indirect
for indirect setting.
setting
START instruction The servo program specified with
setting error
the servo program start does not
exist.
START instruction The axis No. set in the servo
setting error
program start is different from the
axis No. set in the servo program.
Servo program
The instruction code cannot be
instruction code
decoded.
error
(A non-existent instruction code
has been specified.)
Start error
A virtual mode program was
started in the real mode.
Start error
A real mode program was started
in the virtual mode.
Start error
(1) Operation disable instructions
(VPF, VPR, VPSTART, PVF,
PVR, ZERO, VVF, VVR, OSC)
was started in virtual mode.
(2) Operation disable instructions
(ZERO, OSC, CHGA-C,
CHGA-E) was started in real
mode axis.
(3) Operation disable instructions
(CHGA-C, CHGA-E) from the
D(P).SVST instruction of
Motion dedicated instruction
was started.
APP - 6
Corrective action
Start after set the starting
angle within the range of 0 to
3599 ( 0.1 [degree]).
Start after set the frequency
within the range of 1 to
5000[CPM].
Set the specified number of
pitches within the range of 0 to
999.
Review the devices of home
position return data for indirect
setting.
Set the correct servo program
No..
Set the correct axis No.
Set the correct instruction
code.
Check the program mode
allocation.
Correct the servo program.
Use the D(P).CHGA instruction
of Motion dedicated instruction.
APPENDICES
Table 1.2 Servo program setting error list (Continued)
Error code
stored in SD517
Error name
Axis No. setting
error
906
Start error
907
Start error
908
Error contents
Error processing
Positioning control does not
(1) Unused axis of the system
start.
setting is set in the Motion
SFC program set in the servo
program start.
(2) It was started by setting the
real mode axis in the virtual
servo program.
(3) It was started in the condition
that the real mode axis had
been mixed with virtual axis in
the interpolation axis.
(4) It was started by setting the
virtual axis in the real mode
program in virtual mode.
It was started during processing for
switching from real mode to virtual
mode.
It was stated during processing
for switching from virtual mode to
real mode.
APP - 7
Corrective action
Set the axis No. set in the
system setting or mechanical
system program.
Use M2043 (real mode/virtual
mode switching request),
M2044 (real mode/virtual
mode switching status) as
interlocks for start.
APPENDICES
APPENDIX 1.2 Minor errors
These errors are detected in the PLC program or servo program, and the error codes
of 1 to 999 are used.
Minor errors include the setting data errors, starting errors, positioning control errors
and current value/speed change errors and system errors.
(1) Setting data errors (1 to 99)
These errors occur when the data set in the parameters for positioning control is
not correct.
The error codes, causes, processing, and corrective actions are shown in Table
1.3.
Table 1.3 Setting data error (1 to 99) list
Error
code
21
22
23
24
Erroneous
data
Error
processing
Check timing
Error cause
Home position return start
of the count, proximity
dog, data set, dog cradle,
stopper and limit switch
combined type
The home position address is
outside the range of 0 to
35999999 ( 10–5[degree]) with
degree axis.
Set the home position address
within the setting range using
MT Developer.
The home position return speed
is outside the range of 1 to
speed limit value.
Set the home position return speed
or less to the speed limit value
using MT Developer.
The creep speed is outside the
range of 1 to home position
return speed.
Set the creep speed below to the
home position return speed or less
using MT Developer.
Home position return start
of the count, proximity
dog, dog cradle, stopper
and limit switch combined
type
Home position
Home
The travel value after the
Home position return start
position
proximity dog ON is outside the return is not
of the count type
started.
return data
range of 0 to (231-1) ( unit).
Corrective action
Set the travel value after the
proximity dog ON within the setting
range using MT Developer.
25
Home position return start The parameter block No. is
outside the range of 1 to 64.
of the count, proximity
dog, dog cradle, stopper
and limit switch combined
type
Set the parameter block No. within
the setting range using MT
Developer.
26
Torque limit value at the creep
Home position return start
speed is outside the range of 1
of the stopper type
to 1000[%].
Set the torque limit value at the
creep speed within the setting
range using MT Developer.
27
Home position return start Dwell time at the home position
return is outside the range of 0
of the usable retry
to 5000[ms].
function
Set the dwell time at the home
position return retry within the
setting range using MT Developer.
40
Parameter
Interpolation control start
block
The interpolation control unit of
the parameter block is different
from the control unit of the fixed
parameters.
Control with the Set the same control unit of the
fixed parameters and servo
control unit of
parameters.
the fixed
parameters.
POINT
When the interpolation control unit of parameter block is different from the control
unit of fixed parameters, an error code may not be stored with the combination of
units.
Refer to Section 6.1.4 for details.
APP - 8
APPENDICES
(2) Positioning control start errors (100 to 199)
These errors are detected at the positioning control start.
The error codes, causes, processing, and corrective actions are shown in Table
1.4.
Table 1.4 Positioning control start error (100 to 199) list
100
101
103
104
105
(Note)
106
(Note)
107
108
(Note)
Speed control with
fixed position stop
OSC
Position follow-up control
Home position return
Manual pulse generator
JOG
Constant-speed
Speed switching
Speed/position switching
Speed
Positioning
Error
code
Fixed-pitch feed
Control mode
Error cause
• The PLC ready flag (M2000)
or PCPU ready flag (SM500)
is OFF.
• The start accept flag (M2001
to M2032) for applicable axis
is ON.
• The stop command
(M3200+20n) for applicable
axis is ON.
• The rapid stop command
(M3201+20n) for applicable
axis is ON.
• The feed current value is
outside the range of stroke
limit at the start.
• Positioning is outside the
range of stroke limit.
• The address that does not
generate an arc is set at the
auxiliary point-specified
circular interpolation or
auxiliary point-specified
helical interpolation.
Relationship between the
start point, auxiliary point
and end point.
Error
processing
Corrective action
• Set the Motion CPU to RUN.
• Turn the PLC ready flag
(M2000) on.
• Take an interlock in the
program not to start the
starting axis. (Use the start
accept flag OFF of the
applicable axis as the starting
condition).
• Turn the stop command
(M3200+20n) off and start.
• Turn the rapid stop command
(M3201+20n) off and start.
• Set within the stroke limit
range by the JOG operation.
• Set within the stroke limit
range by the home position
Positioning return or current value
control
change.
does not
• Perform the positioning within
start.
the range of stroke limit.
• Correct the addresses of the
servo program.
• The address that does not
generate an arc is set at the
R (radius) specified circular
interpolation R (radius)
specified helical interpolation.
Relationship between the
start point, radius and
end point.
(Note): These errors are stored the error codes of the all applicable interpolation axes at the interpolation operation.
APP - 9
APPENDICES
Table 1.4 Positioning control start error (100 to 199) list (Continued)
109
110
(Note)
111
115
OSC
Speed control with
fixed position stop
Position follow-up control
Home position return
Manual pulse generator
JOG
Constant-speed
Speed switching
Speed/position switching
Speed
Positioning
Error
code
Fixed-pitch feed
Control mode
Error cause
• The difference between the
end point address and ideal
end point is outside the
allowable error range for
circular interpolation at the
circular interpolation.
• The speed/position control
restarting was performed,
although it was not after stop
during operation of the
speed/position switching
control.
• The home position return
complete signal
(M2410+20n) turned on at
the home position return of
proximity dog, dog cradle
and stopper type.
Corrective action
• Correct the addresses of the
servo program.
• The address that does not
generate an arc is set at the
central point-specified
circular interpolation or
central point-specified helical
interpolation.
Relationship between
the start point, central
point and end point.
• The setting JOG speed is
"0".
• The setting JOG speed
exceeded the JOG speed
limit value.
116
Error
processing
Positioning
control
does not • Do not re-start except the stop
start.
during speed/position switching
control.
• Do not start continuously for the
home position return.
Return to a point before the
proximity dog signal ON by
JOG operation or positioning
operation, etc., and perform the
home position return.
• Set the correct speed (within
the setting range).
Control
with the
JOG
speed limit
value.
• The setting JOG speed limit Control
value exceeded the setting with the
range.
maximum
setting
range of
each
control
unit.
• Set the correct JOG speed limit
value (within the setting range).
(Note): These errors are stored the error codes of the all applicable interpolation axes at the interpolation operation.
APP - 10
APPENDICES
Table 1.4 Positioning control start error (100 to 199) list (Continued)
117
118
120
121
130
Speed control with
fixed position stop
OSC
Position follow-up control
Home position return
Manual pulse generator
JOG
Constant-speed
Speed switching
Speed/position switching
Speed
Positioning
Error
code
Fixed-pitch feed
Control mode
Error cause
• Both of forward and reverse
rotation were set at the
simultaneous start for the
JOG operation.
• The speed-switching point
exceeded the end address.
• The address of the
positioning in the reverse
direction is not set.
• ZCT not set
The zero pass signal
(M2406+20n) turned off at
the re-travel at the home
position return for proximity
dog, count and limit switch
combined type or start in the
home position return for
data set type.
• When "Not execute servo
program" is selected in the
operation setting for
incompletion of home
position return, the home
position return request signal
(M2409+20n) turns on.
• Speed control with fixed
position stop with was
started for the axis set in
except unit [degree].
• Speed control with fixed
position stop was started in
the axis which is not "stroke
limit invalid".
APP - 11
Error
processing
Corrective action
• Set a correct data.
Only the
applicable
axis set to
the
forward
direction
starts.
• Set the speed-switching point
Positioning
before the end address.
control
• Set the forward direction
does not
address.
start.
Home
position
return is
not
completed
correctly.
• Execute the home position
return after the zero point
passed.
• Execute servo program after
home position return.
• In the system which enables
execution of servo program even
if the home position return
request signal (M2409+20n)
turns on, set "Execute servo
program" as "operation setting
Positioning for incompletion of home position
control
return".
does not
• Set the unit [degree] in the axis
start.
which starts speed control with
fixed position stop.
• Set the stroke limit invalid
"(Upper stroke limit value) equal
to (lower stroke limit value)" in
the axis which starts speed
control with fixed position stop.
APPENDICES
Table 1.4 Positioning control start error (100 to 199) list (Continued)
140
141
142
145
151
152
153
Speed control with
fixed position stop
OSC
Position follow-up control
Home position return
Manual pulse generator
JOG
Constant-speed
Speed switching
Speed/position switching
Speed
Positioning
Error
code
Fixed-pitch feed
Control mode
Error cause
Error
processing
Corrective action
• The travel value of the
reference axis is set at "0" in
the linear interpolation for
reference axis specification.
• Do not set axis of travel value
"0" as the reference axis.
• The position command
device of position follow-up
control is set the odd
number.
• The positioning control which
use the external input signal
was executed for the axis
which has not set the
external input signal in the
system settings.
• Unusable instructions were
started in the external input
signal setting via servo
amplifier.
• Set the even number for the
position command device of
position follow-up control.
• Not allowed axis started in
the virtual mode. (It cannot
be started with error at real
mode/virtual mode switching.
• It started at the virtual mode
and during deceleration by
all axes servo OFF (M2042
OFF).
• It started at the virtual mode
and during deceleration by
occurrence of the output
module servo error.
APP - 12
• Set the external input signal in
the system setting.
Positioning
• Do not start the speed/position
control
switching control and count type
does not
home position return in the
start.
external input signal setting via
servo amplifier.
• Start in the virtual mode again
after correct the error cause in
the real mode.
APPENDICES
(3) Positioning control errors (200 to 299)
These are errors detected during the positioning control.
The error codes, causes, processing and corrective actions are shown in Table
1.5.
Table 1.5 Positioning control error (200 to 299) list
200
201
202
203
204
Speed control with
fixed position stop
OSC
Position follow-up control
Home position return
Manual pulse generator
JOG
Constant-speed
Speed switching
Speed/position switching
Speed
Positioning
Error
code
Fixed-pitch feed
Control mode
Error cause
• The PLC ready flag (M2000)
turned off during the control
by the servo program.
• The PLC ready flag (M2000)
turned off during the home
position return.
Error
processing
Corrective action
• Turn the PLC ready flag
(M2000) on after all axes have
stopped.
• Perform the home position
return again after turning the
PLC ready flag (M2000) on or
Deceleraturning the stop command
tion stop
(M3200+20n) or rapid stop
command (M3201+20n) off.
Return to a point before the
proximity dog signal ON
using JOG operation or
positioning operation, and
perform the home position
return again in the proximity
Rapid stop
dog type.
• The stop command
(M3200+20n) turned on
during the home position
return.
• The rapid stop command
(M3201+20n) turned on
during the home position
return.
• The PLC ready flag (M2000)
• Turn the PLC ready flag
turned off to on again during
(M2000) off to on after all axes
deceleration by turning off
have stopped.
No
the PLC ready flag (M2000). operation
Turn the PLC ready flag
(M2000) off to on during
deceleration is "no operation".
• All axes rapid stop is
executed using the test
mode of MT Developer
during the home position
return.
206
APP - 13
• Return to a point before the
proximity dog signal ON using
JOG operation or positioning
operation, and perform the
home position return again in
the proximity dog type.
• Return to a point before the
proximity dog signal ON using
JOG operation or positioning
Rapid stop operation, and perform the
home position return again,
when the proximity dog signal
turns off in the count type.
Perform the home position
return operation again,
when the proximity dog
signal turns on in the count
type.
APPENDICES
Table 1.5 Positioning control error (200 to 299) list (Continued)
207
208
209
210
211
214
Speed control with
fixed position stop
OSC
Position follow-up control
Home position return
Manual pulse generator
JOG
Constant-speed
Speed switching
Speed/position switching
Speed
Positioning
Error
code
Fixed-pitch feed
Control mode
Error cause
• The feed current value
exceeded the stroke limit
range during positioning
control. Only the axis
exceed the stroke limit
range is stored at the
circular/helical interpolation.
All interpolation axes are
stored in the linear
interpolation.
• The feed current value of
another axis exceeded the
stroke limit value during the
circular/helical interpolation
control or simultaneous
manual pulse generator
operation. (For detection of
other axis errors).
• An overrun occurred
because the setting travel
value is less than the
deceleration distance at the
speed/position switching
(CHANGE) signal input
during speed/position
switching control, or at the
proximity dog signal input
during home position return
of count type.
• The setting travel value
exceeded the stroke limit
range at the speed/position
switching (CHANGE) signal
input during the speed/
position switching control.
• During positioning control,
an overrun occurred
because the deceleration
distance for the output
speed is not attained at the
point where the final
positioning address was
detected.
• The manual pulse generator
was enabled during the start
of the applicable axis, the
manual pulse generator
operation was executed.
APP - 14
Error
processing
Corrective action
• Correct the stroke limit range or
travel value setting so that
positioning control is within the
range of the stroke limit.
• Set the speed setting so that
overrun does not occur.
• Set the travel value so that
Deceleraoverrun does not occur.
tion stop
• Correct the stroke limit range or
setting travel value so that
positioning control is within the
range of stroke limit.
• Set the speed setting so that
overrun does not occur.
• Set the travel value so that
overrun does not occur.
• Execute the manual pulse
Manual
generator operation after the
pulse
applicable axis stopped.
generator
input is
ignored
until the
axis stops.
APPENDICES
Table 1.5 Positioning control error (200 to 299) list (Continued)
215
220
221
222
225
230
Speed control with
fixed position stop
OSC
Position follow-up control
Home position return
Manual pulse generator
JOG
Constant-speed
Speed switching
Speed/position switching
Speed
Positioning
Error
code
Fixed-pitch feed
Control mode
Error cause
• The speed switching point
address exceed the end
point address.
• The positioning address in
the reverse direction was
set during the speed
switching control.
• The same servo program
was executed again.
• When the control unit is
"degrees" during the position
follow-up control, the
command address
exceeded the range of 0 to
35999999.
• The command address for
the position follow-up
control exceeded the stroke
limit range.
• During the speed control
with fixed position stop, the
setting address exceeded
the range of 0 to 35999999
at the fixed position stop
command device ON.
• During the speed control
with fixed position stop, the
fixed position
acceleration/deceleration
time is "0" at the fixed
position
acceleration/deceleration
time input.
• The speed at the pass point
exceeded the speed limit
value during the constantspeed control.
• When the skip is executed in
the constant-speed control,
the next interpolation
instruction is an absolute
circular interpolation or
absolute helical
interpolation.
APP - 15
Error
processing
Corrective action
• Set the speed-switching point
between the previous speed
switching point address and the
end point address.
Rapid stop
• Correct the Motion SFC
program.
• When the control unit is
"degree", set the command
address within the range of 0 to
35999999.
Decelera- • Set the address within the
tion stop
stroke limit range.
(M2001+n
OFF)
• Set the command address
within the range of 0 to
35999999.
Control
with the
default
value
"1000".
• Set the acceleration/deceleration
time within the range of 1 to
65535.
Control
• Set the speed command value
with the
within the range of 1 to speed
speed limit limit value.
value.
• Execute the absolute linear
interpolation after a point which
make a skip.
Immediate
stop
APPENDICES
(4) Current value/speed change errors (300 to 399)
These are errors detected at current value change or speed change.
The error codes, causes, processing and corrective actions are shown in Table
1.6.
Table 1.6 Current value/speed change error (300 to 399) list
300
301
302
305
309
310
311
312
Speed control with
fixed position stop
OSC
Position follow-up control
Home position return
Manual pulse generator
JOG
Constant-speed
Speed switching
Speed/position switching
Speed
Positioning
Error
code
Fixed-pitch feed
Control mode
Error cause
• The current value was
changed during positioning
control of the applicable axis.
• The current value was
changed for the axis that
had not been started.
• The current value was
changed for the servo OFF
axis.
• The speed was changed for
the axis during home
position return.
• The speed was changed for
the axis during circular
interpolation.
• The speed after speed
change is set outside the
range of 0 to speed limit
value.
• The absolute value of speed
after speed change is set
outside the range of 0 to
speed limit value.
• The current value was
changed outside the range
of 0 to 35999999 ( 10-5
[degrees]) for the degree
axis.
• The speed was changed
during high-speed
oscillation.
• The speed change to "0"
was requested during highspeed oscillation.
• The value outside the range
of 1 to 1000[%] was set in
the torque limit value
change request (CHGT).
• The torque limit value
change request (CHGT)
was made for the axis that
had not been started.
APP - 16
Error
processing
Current
value is
not
changed.
Speed is
not
changed.
Corrective action
• Use the following devices as
interlocks not to change the
current value for the applicable
axis.
(1) The start accept flag (M2001
to M2032) OFF for applicable
axis.
(2) The servo READY signal
(M2415+20n) ON.
• Do not change speed during
home position return.
• Do not change speed during
circular interpolation.
• Set the speed after speed
change within the range of 0 to
speed limit value.
Control
with the
speed limit • Set the absolute value of speed
value.
after speed change within the
range of 0 to speed limit value.
Current
value is
not
changed.
Speed is
not
changed.
• Set the current value within the
range of 0 to 35999999
( 10-5[degree]).
• Do not change speed during
high-speed oscillation.
• Set the change request within
the range of 1 to 1000[%].
Torque
limit value
is not
• Request the change for the
changed.
starting axis.
APPENDICES
(5) System errors (900 to 999)
Table 1.7 System error (900 to 999) list
901
Speed control with
fixed position stop
OSC
Position follow-up control
Home position return
Manual pulse generator
JOG
Constant-speed
Speed switching
Speed/position switching
Speed
Positioning
Error
code
Fixed-pitch feed
Control mode
Error cause
Error
processing
Corrective action
• Check the position.
• The motor travel value while
• Check the battery of encoder.
the power is off exceeded
Further
the "System setting modeallowable travel value during operation
power off" set in the system is possible.
settings at the turning on of
the servo amplifier.
APP - 17
APPENDICES
APPENDIX 1.3 Major errors
These errors occur by control command from the external input signal or Motion SFC
program, and the error codes 1000 to 1999 are used.
Major errors include the positioning control start errors, positioning control errors,
absolute position system errors and system errors.
(1) Positioning control start errors (1000 to 1099)
These errors are detected at the positioning control start.
The error codes, causes, processing and corrective actions are shown in Table
1.8.
Table 1.8 Positioning control start error (1000 to 1099) list
1000
1001
1002
1003
1004
1005
OSC
Speed control with
fixed position stop
Position follow-up control
Home position return
Manual pulse generator
JOG
Constant-speed
Speed switching
Speed/position switching
Speed
Fixed-pitch feed
Error
code
Positioning
Control mode
Error cause
Error
processing
Corrective action
• The external STOP signal of
the applicable axis turned on.
• Turn the STOP signal off.
• The external signal FLS
(upper limit LS) turned off at
the forward direction
(address increase direction)
start.
• The external signal RLS
(lower limit LS) turned off at
the reverse direction
(address decrease direction)
start.
• The external DOG (proximity
dog) signal turned on at the
home position return start of
the proximity dog type.
• Move in the reverse direction by
the JOG operation, etc. and set
within the external limit range.
• The applicable axis is not
servo READY state.
(M2415+20n: OFF).
(1) The power supply of the
servo amplifier is OFF.
(2) During initial processing
after turning on the servo
amplifier.
(3) The servo amplifier is not
mounted.
(4) A servo error is occurred.
(5) Cable fault.
(6) Servo OFF command
(M3215+20n) is ON.
• The servo error detection
signal of the applicable axis
(M2408+20n) turned on.
APP - 18
• Move in the forward direction by
the JOG operation, etc. and set
within the external limit range.
• Perform the home position return
after move to the proximity dog
ON by the JOG operation, etc.
at the home position return of
Positioning the proximity dog type.
control
• Wait until the servo READY
does not
state (M2415+20n: ON).
start.
• Eliminate the servo error, reset
the servo error detection signal
(M2408+20n) by the servo error
reset command (M3208+20n),
then start operation.
APPENDICES
(2) Positioning control errors (1100 to 1199)
These errors are detected at the positioning control.
The error codes, causes, processing and corrective actions are shown in Table
1.9.
Table 1.9 Positioning control error (1100 to 1199) list
1101
1102
1103
1104
1105
1151
OSC
Speed control with
fixed position stop
Position follow-up control
Home position return
Manual pulse generator
JOG
Constant-speed
Speed switching
Speed/position switching
Speed
Positioning
Error
code
Fixed-pitch feed
Control mode
Error cause
• The external signal FLS
(upper limit LS) turned off
during the forward direction
(address increase direction).
• The external signal RLS
(lower limit LS) turned off
during the reverse direction
(address decrease
direction).
• The external stop signal
(stop signal) turned on
during home position return.
Error
processing
Corrective action
• Travel in the reverse direction
by the JOG operation, etc. and
set within the external limit
Decelerarange.
tion stop by
• Travel in the forward direction
"Stop
by the JOG operation, etc. and
processing
set within the external limit
on STOP
range.
input" of the
parameter
• Execute the home position
block.
return so that the external stop
signal (stop signal) may not turn
on.
• The servo error detection
Immediate • Start after disposal at the servo
signal turned on during
stop without error.
positioning control.
decelerating.
• Turn on the power supply of the
• The power supply of the
servo amplifier.
servo amplifier turned off
• Check the connecting cable to
during positioning control.
Turn the
the servo amplifier.
(Servo not mounted status
servo
• Make the gain adjustment.
detection, cable fault, etc.)
READY
• Home position return did not
(M2415+
complete normally without
20n) off.
stop within the in-position
range of home position at
the home position return.
• A synchronous encoder set Input from • Set a synchronous encoder
actually connected in the
in the system setting differs synchrosystem setting.
from a synchronous
nous
encoder actually connected. encoder
does not
accept.
• Check (replace) the Q172DEX
• Q172DEX or encoder
Immediate
or encoder.
hardware error.
input stop
• Check the encoder cable.
• Disconnected encoder cable.
APP - 19
APPENDICES
(3) Absolute position system errors (1200 to 1299)
These errors are detected at the absolute position system.
The error codes, causes, processing and corrective actions are shown in Table
1.10.
Table 1.10 Absolute position system error (1200 to 1299) list
1201
Speed control with
fixed position stop
OSC
Position follow-up control
Home position return
Manual pulse generator
JOG
Constant-speed
Speed switching
Speed/position switching
Speed
Positioning
Error
code
Fixed-pitch feed
Control mode
Error cause
• A sum check error occurred
with the backup data in the
controller at the turning on
servo amplifier power
supply.
• Home position return was
not performed.
• CPU module battery error.
• Home position return started
but did not complete
normally.
• A communication error
between the servo amplifier
and encoder occurred at the
turning on servo amplifier
power supply.
1202
1203
1204
• The amount of change in
encoder current value is
excessive during operation.
A continual check is
performed (both of servo
ON and OFF states) after
the servo amplifier power
has been turned ON.
• The following expression
holds: "Encoder current
value [PLS] feedback
current value [PLS]
(encoder effective bit
number)" during operation.
A continual check is
performed (both of servo
ON and OFF states) after
the servo amplifier power
has been turned on.
APP - 20
Error
processing
Corrective action
• Check the battery and execute
a home position return.
Home
position
return
request ON
• Check the motor and encoder
Home
cables and execute a home
position
position return again.
return
request ON,
servo error
[2016] set.
(Fully
closed loop
control
servo
amplifier
use: Servo
error [2070]
is set.)
• Check the motor and encoder
cables.
Home
position
return
request ON
APPENDICES
(4) System errors (1300 to 1399)
These errors are detected at the power-on.
The error codes, causes, processing and corrective actions are shown in Table
1.11.
Table 1.11 System error (1300 to 1399) list
1310
Speed control with
fixed position stop
OSC
Position follow-up control
Home position return
Manual pulse generator
JOG
Constant-speed
Speed switching
Speed/position switching
Speed
Positioning
Error
code
Fixed-pitch feed
Control mode
Error cause
• Initial communication with
the Multiple CPU system
did not complete normally.
• Motion CPU fault.
APP - 21
Error
processing
Corrective action
Positioning • Replace the Motion CPU.
control
does not
start.
APPENDICES
APPENDIX 1.4 Servo errors
(1) Servo amplifier errors (2000 to 2899)
These errors are detected by the servo amplifier, and the error codes are [2000]
to [2899].
The servo error detection signal (M2408+20n) turns on at the servo amplifier
error occurrence. Eliminate the error cause, reset the servo amplifier error by
turning on the servo error reset command (M3208+20n) and perform re-start.
(The servo error detection signal does not turn on because the codes [2100] to
[2599] are for warnings.)
(Note-1): As for the regenerative alarm (error code [2030]) or overload 1 or 2
(error codes [2050], [2051]), the state at the operation is held also for
after the protection circuit operation in the servo amplifier. The memory
contents are cleared with the external power supply off, but are not
cleared by the reset signal.
(Note-2): If resetting by turning off the external power supply is repeated at the
occurrence of error code [2030], [2050] or [2051], it may cause devices
to be destroyed by overheating. Re-start operation after eliminating the
cause of the error certainly.
Details of servo errors are shown in Table 1.12.
CAUTION
If a controller, servo amplifier self-diagnosis error occurs, check the points stated in this manual
and clear the error.
APP - 22
APPENDICES
Table 1.12 Servo error (2000 to 2899) list
Error
code
Error cause
Name
Error check
Description
Error
processing
• Power supply voltage is low.
MR-J3-B: 160VAC or less
MR-J3-B1: 83 VAC or less
MR-J3-B4: 280 VAC or less
Corrective action
• Review the power supply.
• There was an instantaneous control
power failure of 60[ms] or longer.
• Shortage of power supply capacity
caused the power supply voltage to drop
at start, etc.
2010 Undervoltage
• The bus voltage dropped to the following
value or less.
MR-J3-B: 200VDC
MR-J3-B1: 158VDC
MR-J3-B4: 380VDC
Any time during
operation
• Faulty parts in the servo amplifier
[Checking method]
Servo error [2010] occurs if power is
switched on after disconnection of all
cables but the control circuit power
supply cables.
• Replace the servo amplifier.
• Faulty parts in the servo amplifier
(RAM memory error)
[Checking method]
Memory error 1
Servo error [2012] occurs if power is
2012
(RAM)
switched on after disconnection of all
cables but the control circuit power
supply cables.
• Replace the servo amplifier.
2013 Clock error
• Faulty parts in the servo amplifier
(Printed board fault)
[Checking method]
Servo error [2013] occurs if power is
switched on after disconnection of all
cables but the control circuit power
supply cables.
• Faulty the controller
(Clock error transmitted from the
controller)
[Checking method]
Servo error [2013] occurs if Motion CPU
is used in the Multiple CPU system.
• Servo amplifier
power on.
• Multiple CPU
system power on.
Immediate
stop
• Replace the servo amplifier.
Any time during
operation
• Replace the Motion CPU.
• Replace the servo amplifier.
2014 CPU Watchdog • Faulty hardware of servo amplifier
• Faulty parts in the servo amplifier
(EEP-ROM fault)
[Checking method]
Servo error [2015] occurs if power is
Memory error 2
switched on after disconnection of all
2015
(EEP-ROM)
cables but the control circuit power
supply cables.
• Servo amplifier
power on.
• Multiple CPU
system power on.
• The number of write times to EEP-ROM
exceeded 100,000.
APP - 23
APPENDICES
Table 1.12 Servo error (2000 to 2899) list (Continued)
Error
code
Error cause
Name
Error check
Description
Error
processing
• Encoder connector (CN2) disconnected.
• Connect correctly.
• Encoder fault
• Replace the servomotor.
• Encoder cable faulty
Encoder error 1
2016
(Wire breakage or shorted)
(At power on)
• Encoder cable type (2-wire, 4-wire)
selection was wrong in parameter
setting.
2017 Board error
• Repair or replace the cable.
• Set the correct encoder type of
servo parameter.
• Faulty parts in the servo amplifier
(CPU/parts fault)
[Checking method]
Servo error [2017] occurs if power is
switched on after disconnection of all
cables but the control circuit power
supply cables.
• Replace the servo amplifier.
• Servo amplifier
power on.
• Multiple CPU
system power on.
• Faulty parts in the servo amplifier
(ROM memory fault)
[Checking method]
Memory error 3
Servo error [2019] occurs if power is
2019
(Flash ROM)
switched on after disconnection of all
cables but the control circuit power
supply cables.
2020 Encoder error 2
2024
Main circuit
error
Immediate
stop
• Encoder connector (CN2) disconnected.
• Connect correctly.
• Encoder fault
• Replace the servomotor.
• Encoder cable faulty
(Wire breakage or shorted)
• Repair or replace the cable.
• Power input wires and servomotor
power wires are in contact.
[Checking method]
Servo error [2024] occurs if servo is
switched on after disconnecting the U, V
and W power cables from the servo
amplifier.
• Correct the wiring.
Any time during
operation
• Sheathes of servomotor power cables
deteriorated, resulting in ground fault.
• Replace the cable.
• Replace the servo amplifier.
• Main circuit of servo amplifier failed.
• Voltage drop in encoder
(Battery of servo amplifier
disconnected.)
Absolute
2025
position erase
Corrective action
• Battery voltage low
• Battery cable or battery is faulty.
• Home position return not set. (Power
was switched on for the first time in the
absolute position detection system.)
• Servo amplifier
power on.
• Multiple CPU
system power on.
APP - 24
• After leaving the servo error
[2025] occurring for a few
minutes, switch power off, then
Immediate on again. Always make home
stop
position return again.
Home
position
return
request
ON
• Replace the battery.
Always make home position
return again.
• After leaving the servo error
[2025] occurring for a few
minutes, switch power off, then
on again. Always make home
position return again.
APPENDICES
Table 1.12 Servo error (2000 to 2899) list (Continued)
Error
code
Error cause
Name
Error check
Description
• Check the machine.
• Accuracy at initial magnetic pole
detection is bad.
• Review the parameter No.PS09
setting (magnetic pole detection
voltage level).
• Wrong wiring of the servomotor wires
(U, V, and W).
• Correct the wiring.
• Linear encoder resolution differs from
the setting value.
• Review the parameter No.PS02
and PS03 setting (linear encoder
resolution).
• Check the mounting of linear
encoder.
• Magnetic pole detection limit switch is
not on.
Linear encoder
error 2
Corrective action
• Machine struck.
• Servo amplifier
Initial magnetic
power on.
2027 pole detection
• Multiple CPU
error
• Mismatch of the linear encoder mounting system power on.
direction.
2028
Error
processing
• The temperature of linear encoder is
high.
• The signal level of linear encoder has
dropped.
Any time during
operation
APP - 25
• Check the mounting direction of
Immediate linear encoder.
stop
• Connect the magnetic detection
limit switch correctly.
• Set the limit switch to forced ON
by the parameter No.PD02
setting. (When the amplifier input
is used in the Motion CPU, do
not set to forced ON since it is
shared with the input signal.)
• Check the temperature of linear
encoder and contact with the
linear encoder manufacturer.
• Check the mounting of linear
encoder.
APPENDICES
Table 1.12 Servo error (2000 to 2899) list (Continued)
Error
code
2030
Error cause
Name
Regenerative
alarm
Error check
Description
Error
processing
Corrective action
• Wrong setting of system setting
(regenerative brake)
• Check the regenerative brake of
system setting and set correctly.
• Built-in regenerative brake resistor or
regenerative brake option is not
connected.
• Connect correctly.
• High-duty operation or continuous
regenerative operation caused the
permissible regenerative power of the
regenerative brake option to be
exceeded.
[Checking method]
Call the servo monitor and check the
regenerative level.
• Reduce the frequency of
positioning.
(Call the regenerative level [%] of
servo monitor and reduce the
frequency of
acceleration/deceleration or feed
speed.)
• Use the regenerative brake
option of larger capacity.
• Reduce the load.
• Power supply voltage is abnormal.
MR-J3-B: 260VAC or more
MR-J3-B1: More than 135VAC
MR-J3-B4: 535VAC or more
• Review the power supply
• Built-in regenerative brake resistor or
regenerative brake option faulty.
• Replace the servo amplifier or
regenerative brake option..
• Regenerative transistor faulty.
[Checking method]
• The regenerative brake option has
overheated abnormally.
• Servo error [2030] occurs even after
removal of the built-in regenerative
brake resistor or regenerative brake
option.
• Replace the servo amplifier.
Any time during
operation
Immediate
stop
• Command speed is too high. (Motor
speed has exceeded the instantaneous
permissible speed.)
• Check the servo program or
mechanical system program,
and set correctly.
• Small acceleration/deceleration time
constant caused overshoot to be large.
• If an overshoot occurs during
acceleration/deceleration, check
the acceleration/deceleration
time in the fixed parameters.
• Servo system is instable to cause
overshoot.
• Re-set servo gain to proper
value.
• If servo gain cannot be set to
proper value:
1) Reduce load inertia moment
ratio; or
2) Reexamine acceleration/
deceleration time constant.
• Electronic gear ratio is high.
• Set correctly.(Check if the
number of pulses per revolution
and travel value per revolution
in the fixed parameters match
the machine system.
• Encoder faulty.
• Replace the servomotor.
2031 Overspeed
APP - 26
APPENDICES
Table 1.12 Servo error (2000 to 2899) list (Continued)
Error
code
Error cause
Name
2032 Overcurrent
Error check
Description
Error
processing
• Short occurred in servomotor power (U,
V, W).
• Correct the wiring.
• Transistor (IPM) of the servo amplifier
faulty.
[Checking method]
Servo error [2032] occurs if power is
switched on after U, V and W are
disconnected.
• Replace the servo amplifier.
• Ground fault occurred in servomotor
power (U, V, W).
• Correct the wiring.
• External noise caused the overcurrent
detection circuit to misoperate.
• Take noise suppression
measures.
• Lead of built-in regenerative brake
resistor or regenerative brake option is
open or disconnected.
• Replace the lead.
• Connect correctly.
• Regenerative transistor faulty.
• Replace the servo amplifier.
• Wire breakage of built-in regenerative
brake resistor or regenerative brake
option.
• For wire breakage of built-in
regenerative brake resistor,
replace the servo amplifier.
• For wire breakage of
regenerative brake option,
replace the regenerative brake
option.
2033 Overvoltage
• Capacity of built-in regenerative brake
resistor or regenerative brake option is
insufficient.
Communica2034
tions error
2035
2036
Any time during
operation
Immediate
stop
• Add regenerative brake option or
increase capacity.
• Power supply voltage is high.
• Review the power supply.
• Ground fault occurred in servomotor
power (U, V, W).
• Correct the wiring.
• Data received from the Motion CPU
faulty.
• Check the connection of
SSCNET cable.
• Check if there is a disconnection
in the SSCNET cable.
• There is excessive variation in the
position commands and command
speed is too high from the Motion CPU.
• Check the command speed and
the number of pulses per
revolution/travel value per
revolution of the fixed
parameters.
Command
• Noise entered the commands from the
frequency error
Motion CPU.
Transmission
error
Corrective action
• Check the connection of
SSCNET cable.
• Check if there is a disconnection
in the SSCNET cable.
• Check if any relays or solenoids
are operating in the vicinity.
• Motion CPU failure
• Replace the Motion CPU.
• Fault in communication with the Motion
CPU.
• Check the connection of
SSCNET cable.
• Check if there is a disconnection
in the SSCNET cable.
APP - 27
APPENDICES
Table 1.12 Servo error (2000 to 2899) list (Continued)
Error
code
Error cause
Name
Linear servo
control error
2042
(Linear servo
amplifier)
Error check
Description
Error
processing
Corrective action
• Linear encoder signal resolution differs
from the setting value.
• Review the settings of parameter
No.PS02 and PS03 setting
(linear encoder resolution).
• Check the mounting of linear
encoder.
• Initial magnetic pole detection has not
been performed.
• Perform initial magnetic pole
detection.
• Mismatch of the linear encoder mounting
direction.
• Check the mounting direction of
linear encoder.
• Review the setting of parameter
No. PC27 (encoder pulse count
polarity).
• Wrong wiring of the servomotor wires
(U, V, and W).
• Correct the wiring.
• The position deviation exceeded the
detection level.
• Review the operation condition.
• Review the setting of parameter
No.PS05 (Linear servo control
position deviation error detection
level) as required.
• The speed deviation exceeded the
detection level.
• Review the operation condition.
• Review the setting of parameter
No.PS06 (Linear servo control
speed deviation error detection
level) as required.
• Servo amplifier
power on.
• Multiple CPU
system power on.
• The thrust deviation exceeded the
detection level.
Immediate • Review the operation condition.
stop
• Review the setting of parameter
No.PS07 (Linear servo control
thrust deviation error detection
level) as required.
• Load side encoder resolution differs from
the setting value.
• Review the settings of parameter
No.PE04 and PE05 (Fully closed
loop control feedback pulse
electronic gear).
• Check the mounting of load side
encoder.
• Mismatch of the load side encoder
mounting direction.
• Check the mounting direction of
load side encoder.
• Review the setting of parameter
No. PC27 (encoder pulse count
polarity).
Fully closed
control error
2042 (Fully closed
loop control
• The position deviation exceeded the
servo amplifier) detection level.
• Review the operation condition.
• Review the setting of parameter
No.PE07 (Fully closed loop
control position deviation error
detection level) as required.
• Review the operation condition.
• Review the setting of parameter
No. PE06 (Fully closed loop
control speed deviation error
detection level) as required.
• The speed deviation exceeded the
detection level.
APP - 28
APPENDICES
Table 1.12 Servo error (2000 to 2899) list (Continued)
Error
code
2045
2046
2047
Error cause
Name
Error check
Description
Cooling fan
alarm
Corrective action
• Servo amplifier failure
• Replace the servo amplifier.
• The power supply was turned on and off
continuously by overloaded status.
• The drive method is reviewed.
Main circuit
• Ambient temperature of servo amplifier
device overheat is over 55[°C] (131[°F]).
Servomotor
overheat
Error
processing
• Review environment so that
ambient temperature is 0 to
55[°C] (32 to 131[°F]).
• Used beyond the specifications of close
mounting of servo amplifier.
• Use within the range of
specifications.
• Ambient temperature of servomotor is
over 40[°C] (104[°F]).
• Review environment so that
ambient temperature is 0 to
40[°C] (32 to 104[°F]).
• Servomotor is overloaded.
• Reduce load.
• Review operation pattern.
• Use servomotor that provides
larger output.
• Thermal sensor in encoder is faulty.
• Replace the servomotor.
• Cooling fan life expiration
• Replace the cooling fan of the
servo amplifier.
• Foreign matter caught in the fan stopped
rotation.
• Remove the foreign matter.
• The power supply of the cooling fan
failed.
• Replace the servo amplifier.
Any time during
operation
• Servo amplifier is used in excess
of its continuous output current.
Immediate • Reduce load.
stop
• Review operation pattern.
• Use servomotor that provides
larger output.
• Servo system is instable and hunting.
• Repeat acceleration/
deceleration to execute auto
tuning.
• Change auto tuning response
setting.
• Set auto tuning to OFF and make
gain adjustment manually.
• Machine struck something.
• Review operation pattern.
• Install limit switches.
• Wrong connection of servo motor.
(Servo amplifier's output terminals U, V,
W do not match servo motor's input
terminals U, V, W.)
• Connect correctly.
• Encoder faulty.
[Checking method]
When the servomotor shaft is rotated
with the servo off, the cumulative
feedback pulses do not vary in
proportion to the rotary angle of the shaft
but the indication skips or returns
midway.
• Replace the servomotor.
2050 Overload 1
APP - 29
APPENDICES
Table 1.12 Servo error (2000 to 2899) list (Continued)
Error
code
Error cause
Name
Error check
Description
• Review operation pattern.
• Install limit switches.
• Wrong connection of servomotor. (Servo
amplifier's output terminals U, V, W do
not match servo motor's input terminals
U, V, W.)
• Connect correctly.
• Servo system is instable and hunting.
`• Repeat acceleration/
deceleration to execute auto
tuning.
• Change auto tuning response
setting.
• Set auto tuning to OFF and make
gain adjustment manually.
• Encoder faulty.
[Checking method]
When the servomotor shaft is rotated
with the servo off, the cumulative
feedback pulses do not vary in
proportion to the rotary angle of the shaft
but the indication skips or returns
midway.
• Replace the servomotor.
• Acceleration/deceleration time constant
is too small.
Any time during
operation
• Torque limit value is too small.
• Motor cannot be started due to torque
shortage caused by power supply
voltage drop.
Motor
2060
combination
(AL.1A)
error
Corrective action
• Machine struck something.
2051 Overload 2
2052 Error excessive
Error
processing
• Increase the
Immediate acceleration/deceleration time.
• Increase the torque limit value.
stop
• Review the power supply
capacity.
• Use servomotor which provides
larger output.
• Model loop gain value of servo
parameter is small.
• Increase set value and adjust to
ensure proper operation.
• Servomotor shaft was rotated by
external force.
• When torque is limited, increase
the limit value.
• Reduce load.
• Use servomotor that provides
larger output.
• Machine struck something.
• Review operation pattern.
• Install limit switches.
• Encoder faulty
• Replace the servomotor.
• Wrong connection of servomotor. (Servo
amplifier's output terminals U, V, W do
not match servomotor's input terminals
U, V, W.)
• Connect correctly.
• Fault in combination with the servo
amplifier and servomotor.
• Servo amplifier
power on.
• Multiple CPU
system power on.
APP - 30
• Use the correct combination with
the servo amplifier and
servomotor.
APPENDICES
Table 1.12 Servo error (2000 to 2899) list (Continued)
Error
code
Error cause
Name
Error check
Description
Error
processing
• The speed of linear encoder has
exceeded the range of use.
• Change the speed of linear
encoder within the range of use.
• Noise entered.
• Take the noise reduction
measures.
Any time during
operation
2061 Linear encoder
• Alarm of the linear encoder.
(AL.2A) error 1
• Contact with the linear encoder
manufacturer.
• Adjust the positions of the scale
and head.
• Defective installation positions of the
scale and head.
2070
2071
2088
(88)
Load side
encoder error 1
Load side
encoder error 2
Watchdog
2102 Open battery
(AL.92) cable warning
Corrective action
• The connector CN2L is disconnected.
• Connect correctly.
• Faulty of the load side encoder cable
• Repair or change the cable.
• Wrong wiring of the load side encoder
cable
• Review the wiring connection.
• Servo amplifier
• The load side encoder cable type (2power on.
wire, 4-wire) selection was wrong in the
• Multiple CPU
parameter setting.
system power on.
Immediate
stop
• Correct the setting in the fourth
digit of parameter No. PC26
encoder cable communication
system selection).
• The startup timing is slow.
(For the load side encoder with the
external power supply input)
• Make the startup timing of the
external power supply fast.
• Faulty of the load side encoder cable
• Repair or change the cable.
• Wrong wiring of the load side encoder
cable
• Review the wiring connection.
• The power supply voltage dropped.
(For the load side encoder with the
external power supply input)
• Check the power supply capacity
and voltage.
• CPU, parts faulty
• Replace the servo amplifier.
• Battery cable for absolute position
detection system is open.
• Repair the cable or replace the
battery.
• Voltage of battery for absolute position
detection system supplied fell to about
3V or less.
(Detected with the encoder.)
• Replace the battery.
• After home position return, droop pulses
remaining are greater than the in2106 Home position
(AL.96) setting warning position range setting.
Any time during
operation
• Creep speed is high.
• Re-try the home position return.
• Reduce the creep speed.
• Voltage of battery for absolute position
detection system installed to servo
2116
Battery warning
amplifier fell to 3.2V or less.
(AL.9F)
(Detected with the servo amplifier.)
Operation • Replace the battery.
continues
Excessive
2140
regenerative
(AL.E0)
warning
• There is a possibility that regenerative
alarm [2030] may occur.
(Detected 85[%] regenerative level of
the maximum load capacity for the
regenerative register.)
• Refer to the details on the
regenerative alarm [2030].
2141 Overload
(AL.E1) warning 1
• There is a possibility that overload alarm
[2050], [2051] may occur.
(Detected 85[%] overload level.)
• Refer to the details on the
overload alarm [2050], [2051].
APP - 31
APPENDICES
Table 1.12 Servo error (2000 to 2899) list (Continued)
Error
code
Error cause
Name
Error check
Description
Error
processing
• Review environment so that
ambient temperature is 0 to
49[°C] (32 to 104[°F]).
• Ambient temperature of servomotor is
over 40[°C] (104[°F]).
Servo motor
2142
overheat
(AL.E2)
warning
Operation • Reduce load.
continues • Review operation pattern.
• Use servomotor that provides
larger output.
• Servomotor is overloaded.
• Replace the servomotor.
• Thermistor in encoder is faulty.
Operation • Take noise suppression
continues measures.
• Replace the servomotor.
Home • Execute the home position return
after measures.
position
return
request
ON
• Absolute position encoder pulses faulty.
Absolute
2143
position counter
(AL.E3)
warning
2146 Servo forced
(AL.E6) stop warning
Controller
2147
forced stop
(AL.E7)
warning
• Ensure safety and deactivate
forced stop.
• Servo amplifier are forced stop state.
(Servo amplifier input signal EM1 is
OFF.)
• A forced stop signal is input from the
Motion CPU
Any time during
operation
Immediate
stop
• Ensure safety and deactivate
forced stop.
• Cooling fan life expiration
Cooling fan
• The power supply of the cooling fan is
2148
speed reduction broken.
(AL.E8)
warning
2149 Main circuit off
(AL.E9) warning
2152 Overload
(AL.EC) warning 2
Corrective action
• Replace the cooling fan of servo
amplifier.
• Replace the servo amplifier.
• Replace the cooling fan of servo
amplifier.
• Servo-on signal was turned on with main
circuit power off.
• During a stop, the status in which a
current flew intensively in any of the U, V
and W phases of the servomotor
occurred repeatedly, exceeding the
warning level.
• Continuous operation was performed
with the output wattage (speed
2153 Output watt
torque)
of the servomotor exceeding
(AL.ED) excess warning
150[%] of the rated output.
APP - 32
• Switch on the main circuit power.
Operation
continues
• Reduce the positioning frequency
at the specific positioning
address.
• Reduce the load.
• Replace the servo amplifier/
servomotor with the one of larger
capacity.
• Reduce the servomotor speed.
• Reduce the load.
APPENDICES
Table 1.12 Servo error (2000 to 2899) list (Continued)
Error
code
Error cause
Name
Error check
Description
Error
processing
Corrective action
Parameter error
• The servo parameter value is outside the setting
range. (Any unauthorized parameter is ignored and
the value before setting is held.)
2301
to
2599
Parameter
error
Error
code
Parameter
No.
2301
PA01
For manufacturer setting
2302
PA02
Regenerative brake option
2303
PA03
Absolute position detection
system
Name
2304
PA04
Function selection A-1
2305
PA05
For manufacturer setting
2306
PA06
For manufacturer setting
2307
PA07
For manufacturer setting
2308
PA08
Auto tuning mode
2309
PA09
Auto tuning response
2310
PA10
In-position range
2311
PA11
For manufacturer setting
2312
PA12
For manufacturer setting
2313
PA13
For manufacturer setting
2314
PA14
Rotation direction selection
2315
PA15
Encoder output pulse
2316
PA16
For manufacturer setting
2317
PA17
For manufacturer setting
2318
PA18
For manufacturer setting
2319
PA19
Parameter write inhibit
2320
PB01
Adaptive tuning mode
2321
PB02
Vibration suppression control
filter tuning mode
2322
PB03
For manufacturer setting
2323
PB04
Feed forward gain
2324
PB05
For manufacturer setting
2325
PB06
Ratio of load inertia moment to
servo motor inertia moment
2326
PB07
Model loop gain
2327
PB08
Position loop gain
2328
PB09
Speed loop gain
2329
PB10
Speed integral compensation
2330
PB11
Speed differential
compensation
2331
PB12
For manufacturer setting
2332
PB13
Machine resonance
suppression filter 1
2333
PB14
Notch form selection 1
2334
PB15
Machine resonance
suppression filter 2
2335
PB16
Notch form selection 2
APP - 33
Any time
Operation • Check the setting ranges of
during operation continues
the servo parameters.
APPENDICES
Table 1.12 Servo error (2000 to 2899) list (Continued)
Error
code
Error cause
Name
2301 Parameter
to
error
2599
Error check
Description
Error
code
Parameter
No.
2336
PB17
Automatic setting parameter
2337
PB18
Low-pass filter
2338
PB19
Vibration suppression control
vibration frequency setting
2339
PB20
Vibration suppression control
resonance frequency setting
2340
PB21
For manufacturer setting
2341
PB22
For manufacturer setting
2342
PB23
Low-pass filter selection
2343
PB24
Slight vibration suppression
control selection
2344
PB25
For manufacturer setting
2345
PB26
Gain changing selection
2346
PB27
Gain changing condition
2347
PB28
Gain changing time constant
2348
PB29
Gain changing ratio of load
inertia moment to servo motor
inertia moment
2349
PB30
Gain changing position loop
gain
2350
PB31
Gain changing speed loop
gain
2351
PB32
Gain changing speed integral
compensation
2352
PB33
Gain changing vibration
suppression control vibration
frequency setting
2353
PB34
Gain changing vibration
suppression control resonance
frequency setting
2354
PB35
For manufacturer setting
2355
PB36
For manufacturer setting
2356
PB37
For manufacturer setting
2357
PB38
For manufacturer setting
2358
PB39
For manufacturer setting
2359
PB40
For manufacturer setting
2360
PB41
For manufacturer setting
2361
PB42
For manufacturer setting
2362
PB43
For manufacturer setting
2363
PB44
For manufacturer setting
2364
PB45
For manufacturer setting
2365
PC01
Error excessive alarm level
2366
PC02
Electromagnetic brake
sequence output
Error
processing
Corrective action
Name
APP - 34
Any time
Operation • Check the setting ranges of
during operation continues
the servo parameters.
APPENDICES
Table 1.12 Servo error (2000 to 2899) list (Continued)
Error
code
Error cause
Name
Error check
Description
Error
code
Parameter
No.
2367
PC03
Encoder output pulses
selection
2368
PC04
Function selection C-1
2369
PC05
Function selection C-2
Error
processing
Corrective action
Name
2370
PC06
Function selection C-3
2371
PC07
Zero speed
2372
PC08
For manufacturer setting
2373
PC09
Analog monitor output 1
2374
PC10
Analog monitor output 2
2375
PC11
Analog monitor 1 offset
2376
PC12
Analog monitor 2 offset
2377
PC13
For manufacturer setting
2378
PC14
For manufacturer setting
2379
PC15
For manufacturer setting
2380
PC16
For manufacturer setting
2381
PC17
Function selection C-4
2382
PC18
For manufacturer setting
2383
PC19
For manufacturer setting
2384
PC20
For manufacturer setting
2385
PC21
Alarm history clear
2301 Parameter
error
to
2386
PC22
For manufacturer setting
2387
PC23
For manufacturer setting
2599
2388
PC24
For manufacturer setting
2389
PC25
For manufacturer setting
2390
PC26
For manufacturer setting
2391
PC27
For manufacturer setting
2392
PC28
For manufacturer setting
2393
PC29
For manufacturer setting
2394
PC30
For manufacturer setting
2395
PC31
For manufacturer setting
2396
PC32
For manufacturer setting
2397
PD01
For manufacturer setting
2398
PD02
For manufacturer setting
2399
PD03
For manufacturer setting
2400
PD04
For manufacturer setting
2401
PD05
For manufacturer setting
2402
PD06
For manufacturer setting
2403
PD07
Output signal device selection
1
2404
PD08
Output signal device selection
2
2405
PD09
Output signal device selection
3
2406
PD10
For manufacturer setting
APP - 35
Any time
Operation • Check the setting ranges of
during operation continues
the servo parameters.
APPENDICES
Table 1.12 Servo error (2000 to 2899) list (Continued)
Error
code
2301
to
2599
Error cause
Name
Parameter
error
Error check
Description
Error
code
Parameter
No.
2407
PD11
Error
processing
Corrective action
Name
Input filter setting
2408
PD12
For manufacturer setting
2409
PD13
For manufacturer setting
2410
PD14
Function selection D-3
2411
PD15
For manufacturer setting
2412
PD16
For manufacturer setting
2413
PD17
For manufacturer setting
2414
PD18
For manufacturer setting
2415
PD19
For manufacturer setting
2416
PD20
For manufacturer setting
2417
PD21
For manufacturer setting
2418
PD22
For manufacturer setting
2419
PD23
For manufacturer setting
2420
PD24
For manufacturer setting
2421
PD25
For manufacturer setting
2422
PD26
For manufacturer setting
2423
PD27
For manufacturer setting
2424
PD28
For manufacturer setting
2425
PD29
For manufacturer setting
2426
PD30
For manufacturer setting
2427
PD31
For manufacturer setting
2428
PD32
For manufacturer setting
APP - 36
Any time
Operation • Check the setting ranges of
during operation continues
the servo parameters.
APPENDICES
Table 1.12 Servo error (2000 to 2899) list (Continued)
Error
code
Error cause
Name
Error check
Description
Error
processing
Corrective action
Initial parameter error
• The parameter setting is wrong.
• The parameter data was corrupted.
Initial
2601
parameter
to
error
2899
Error
code
Parameter
No.
2601
PA01
For manufacturer setting
2602
PA02
Regenerative brake option
2603
PA03
Absolute position detection
system
2604
PA04
Function selection A-1
2605
PA05
For manufacturer setting
2606
PA06
For manufacturer setting
2607
PA07
For manufacturer setting
2608
PA08
Auto tuning mode
2609
PA09
Auto tuning response
2610
PA10
In-position range
2611
PA11
For manufacturer setting
2612
PA12
For manufacturer setting
2613
PA13
For manufacturer setting
2614
PA14
Rotation direction selection
2615
PA15
Encoder output pulse
2616
PA16
For manufacturer setting
Name
2617
PA17
For manufacturer setting
2618
PA18
For manufacturer setting
2619
PA19
Parameter write inhibit
2620
PB01
Adaptive tuning mode
2621
PB02
Vibration suppression control
filter tuning mode
2622
PB03
For manufacturer setting
2623
PB04
Feed forward gain
2624
PB05
For manufacturer setting
2625
PB06
Ratio of load inertia moment to
servo motor inertia moment
2626
PB07
Model loop gain
2627
PB08
Position loop gain
2628
PB09
Speed loop gain
2629
PB10
Speed integral compensation
2630
PB11
Speed differential
compensation
2631
PB12
For manufacturer setting
2632
PB13
Machine resonance
suppression filter 1
2633
PB14
Notch form selection 1
2634
PB15
Machine resonance
suppression filter 2
2635
PB16
Notch form selection 2
APP - 37
• After checking and
• Servo amplifier
correcting of the parameter
power on.
Immediate
setting, turn off to on or
• Multiple CPU
stop
reset the power of Multiple
system power
CPU system.
on.
APPENDICES
Table 1.12 Servo error (2000 to 2899) list (Continued)
Error
code
Error cause
Name
2601 Initial
parameter
to
error
2899
Error check
Description
Error
code
Parameter
No.
2636
PB17
Automatic setting parameter
2637
PB18
Low-pass filter
2638
PB19
Vibration suppression control
vibration frequency setting
2639
PB20
Vibration suppression control
resonance frequency setting
2640
PB21
For manufacturer setting
2641
PB22
For manufacturer setting
2642
PB23
Low-pass filter selection
2643
PB24
Slight vibration suppression
control selection
2644
PB25
For manufacturer setting
2645
PB26
Gain changing selection
2646
PB27
Gain changing condition
2647
PB28
Gain changing time constant
2648
PB29
Gain changing ratio of load
inertia moment to servo motor
inertia moment
2649
PB30
Gain changing position loop
gain
2650
PB31
Gain changing speed loop
gain
2651
PB32
Gain changing speed integral
compensation
2652
PB33
Gain changing vibration
suppression control vibration
frequency setting
2653
PB34
Gain changing vibration
suppression control resonance
frequency setting
2654
PB35
For manufacturer setting
2655
PB36
For manufacturer setting
2656
PB37
For manufacturer setting
2657
PB38
For manufacturer setting
2658
PB39
For manufacturer setting
2659
PB40
For manufacturer setting
2660
PB41
For manufacturer setting
2661
PB42
For manufacturer setting
2662
PB43
For manufacturer setting
2663
PB44
For manufacturer setting
2664
PB45
For manufacturer setting
2665
PC01
Error excessive alarm level
2666
PC02
Electromagnetic brake
sequence output
Error
processing
Corrective action
Name
APP - 38
• After checking and
• Servo amplifier
correcting of the parameter
power on.
Immediate
setting, turn off to on or
• Multiple CPU
stop
reset the power of Multiple
system power
CPU system.
on.
APPENDICES
Table 1.12 Servo error (2000 to 2899) list (Continued)
Error
code
Error cause
Name
Initial
2601
parameter
to
error
2899
Error check
Description
Error
code
Parameter
No.
2667
PC03
Encoder output pulses
selection
2668
PC04
Function selection C-1
2669
PC05
Function selection C-2
Error
processing
Corrective action
Name
2670
PC06
Function selection C-3
2671
PC07
Zero speed
2672
PC08
For manufacturer setting
2673
PC09
Analog monitor output 1
2674
PC10
Analog monitor output 2
2675
PC11
Analog monitor 1 offset
2676
PC12
Analog monitor 2 offset
2677
PC13
For manufacturer setting
2678
PC14
For manufacturer setting
2679
PC15
For manufacturer setting
2680
PC16
For manufacturer setting
2681
PC17
Function selection C-4
2682
PC18
For manufacturer setting
2683
PC19
For manufacturer setting
2684
PC20
For manufacturer setting
2685
PC21
Alarm history clear
2686
PC22
For manufacturer setting
2687
PC23
For manufacturer setting
2688
PC24
For manufacturer setting
2689
PC25
For manufacturer setting
2690
PC26
For manufacturer setting
2691
PC27
For manufacturer setting
2692
PC28
For manufacturer setting
2693
PC29
For manufacturer setting
2694
PC30
For manufacturer setting
2695
PC31
For manufacturer setting
2696
PC32
For manufacturer setting
2697
PD01
For manufacturer setting
2698
PD02
For manufacturer setting
2699
PD03
For manufacturer setting
2700
PD04
For manufacturer setting
2701
PD05
For manufacturer setting
2702
PD06
For manufacturer setting
2703
PD07
Output signal device selection
1
2704
PD08
Output signal device selection
2
2705
PD09
Output signal device selection
3
2706
PD10
For manufacturer setting
APP - 39
• After checking and
• Servo amplifier
correcting of the parameter
power on.
Immediate
setting, turn off to on or
• Multiple CPU
stop
reset the power of Multiple
system power
CPU system.
on.
APPENDICES
Table 1.12 Servo error (2000 to 2899) list (Continued)
Error
code
2601
Error cause
Name
Initial
to
parameter
2899 error
Error check
Description
Error
code
Parameter
No.
2707
PD11
Input filter setting
2708
2709
PD12
PD13
For manufacturer setting
For manufacturer setting
2710
PD14
Function selection D-3
2711
PD15
For manufacturer setting
2712
PD16
For manufacturer setting
2713
PD17
For manufacturer setting
2714
PD18
For manufacturer setting
Error
processing
Corrective action
Name
2715
PD19
For manufacturer setting
2716
PD20
For manufacturer setting
2717
PD21
For manufacturer setting
2718
PD22
For manufacturer setting
2719
PD23
For manufacturer setting
2720
PD24
For manufacturer setting
2721
PD25
For manufacturer setting
2722
PD26
For manufacturer setting
2723
PD27
For manufacturer setting
2724
PD28
For manufacturer setting
2725
PD29
For manufacturer setting
2726
PD30
For manufacturer setting
2727
PD31
For manufacturer setting
2728
PD32
For manufacturer setting
APP - 40
• After checking and
• Servo amplifier
correcting of the parameter
power on.
Immediate
setting, turn off to on or
• Multiple CPU
stop
reset the power of Multiple
system power
CPU system.
on.
APPENDICES
APPENDIX 2 Example Programs
APPENDIX 2.1 Reading M-code
The program example for reading M-code at the completion of positioning start or
positioning is shown below.
The judgement of the positioning start completion and positioning completion is made
with the following signals.
• Positioning start completion ………M2400+20n (positioning start complete signal)
• Positioning completion ……………M2401+20n (positioning complete signal)
[Program Example]
(1) A program that outputs the M-code from PY000 to PY00F to external destination
after conversion into BCD code at the positioning start completion is shown below.
System configuration
Motion SFC program
Q61P Q03UD Q172D QY40 QY40 Q172D
CPU CPU
LX
PY000 PY010
to
to
PY00F PY01F
Reading M-code
[G10]
[F10]
M2401
Positioning start complete flag for axis 1 ON ?
#0=BCD(D13)
#0D150=BCD( D100)
DOUT
PY0,
#0
DOUT YO
,D150
Read M-code for axis 1, and store to #0 after
BCD conversion.
Output the data of "#0" to "PY000 to PY00F".
END
APP - 41
APPENDICES
APPENDIX 2.2 Reading error code
The program example for reading error code at the error occurrence is shown below.
The following signals are used to determine whether or not an error has occurred:
• Minor errors, major errors ………. Error detection signal (M2407+20n)
• Servo errors ……………………... Servo error detection signal (M2408+20n)
POINT
(1) The following delay occurs for leading edge of M2407+20n/M2408+20n and
storage of the error code.
(a) If the PLC program scan time is 80[ms] or less, there will be a delay of up to
80[ms].
(b) If the PLC program scan time is 80[ms] or more, there will be a delay of up
to one scan time.
The error code is stored to each error code storage area after turning on
M2407+20n/M2408+20n, and then read the error code.
APP - 42
APPENDICES
[Program Example]
(1) A program that outputs each error code to PY000 to PY00F (minor error), PY010
to PY01F (major error) and PY020 to PY02F (servo error) after conversion into
BCD code at the error occurrence with axis 1 is shown below.
System configuration
Q61P Q03UD Q172D QY40 QY40 QY40 Q172D
CPU CPU
LX
PY000 PY010 PY020
to
to
to
PY00F PY01F PY02F
Motion SFC program
Reading error code (servo error)
Reading error code (minor error/major error)
Reading error code
Reading error code
[F10]
[F10]
#0=K0
Store to "#0".
[G10]
M2407
Error detection signal
ON for axis 1.
[G20]
D6!=K0
Minor error check
for axis 1.
#0=BCD(D6)
DOUT PY0, #0
Output to PY000 after
converting the minor
error code of D6 into
BCD code.
D7!=K0
Major error check for
axis 1.
#0=BCD(D7)
DOUT PY10, #0
Output to PY010 after
converting the major
error of D7 into BCD
code.
[F20]
[G30]
[F30]
[G10]
[F20]
END
APP - 43
#0=K0
Store to "#0".
M2408*(D8!=0)
Error detection signal ON
for axis 1 and the servo
error check for axis 1.
#0=BCD(D8)
DOUT PY20, #0
Output to PY020 after
converting the servo
error code for axis 1 into
BCD code.
END
APPENDICES
APPENDIX 3 Setting Range for Indirect Setting Devices
Positioning address, command speed or M-code, etc. (excluding the axis No.) set in
the servo program can be set indirectly by the word.
(1) Device range
The number of device words and device range at indirect setting are shown
below.
Parameter block
Arc
Common
Item
Number of
device words
Device setting range
Parameter block No.
1
Address (travel value)
2
Command speed
2
Device
Range
Dwell time
1
D
0 to 8191(Note-1)
M-code
1
W
0000 to 1FFF
Torque limit value
1
#
Auxiliary point
2
U \G
Radius
2
Central point
2
Pitch
1
Control unit
1
Speed limit value
2
Acceleration time
1
Deceleration time
1
Rapid stop deceleration time
1
S-curve ratio
1
Torque limit value
1
STOP input deceleration processing
1
Circular interpolation error allowance range
2
Command speed (Constant speed)
2
FIN acceleration/deceleration
1
Fixed position stop
acceleration/deceleration time
1
Repetition condition (Number of repetitions)
1
Remarks
0000 to 7999
10000 to (10000+p-1)
(Note-2)
Others
Repetition condition (ON/OFF)
Cancel
Skip
Device
Range
WAIT ON/OFF
X
0000 to 1FFF
Fixed position stop
Y
0000 to 1FFF
M
0 to 8191(Note-1)
B
0000 to 1FFF
Bit
F
U \G
0 to 2047
10000.0 to (10000+p-1).F
(Note-2)
(Note-1): Synchronous encoder axis area cannot be set.
(Note-2): "p" indicates the user setting area points of the Multiple CPU high speed transmission area for the each CPU.
APP - 44
APPENDICES
POINT
(1) Be sure to set even-numbered devices for 2-word setting items.
Be sure to set as 32-bit integer type when the data is set in these devices using
the Motion SFC programs. (Example : #0L, D0L)
(2) Refer to Chapter 2 of the "Q173DCPU/Q172DCPU Motion controller
Programming Manual (COMMON)" for the user setting area points of the Multiple
CPU high speed transmission area..
(2) Inputting device data
Indirect setting device data is inputted by the Motion CPU at the servo program
start.
Do not change the applicable device before setting to device and start
completion.
The procedures by start method for setting data to devices and cautions are
shown below.
Start method
Setting method
Set data in indirect setting devices.
Start by the servo program
Start the servo program.
Notes
Do not change the indirect setting
device before the "positioning start
complete signal" of the starting axis
turns on.
Set initial command data in the indirect
setting device.
Start using the servo program (or turn
Set the loop (FOR - NEXT) point data
the cancel command device on).
for CPSTART instruction indirectly
Read the value of "data set pointer for
constant-speed control" of the start
axis, and update the data input by
Motion CPU.
APP - 45
Refer to the positioning signal data
register "Monitoring data area" for
details.
APPENDICES
APPENDIX 4 Processing Times of the Motion CPU
The processing time of each signal and each instruction for positioning control in the
Multiple CPU system is shown below.
(1) Motion operation cycle [ms] (Default)
Q173DCPU
Q172DCPU
Number of setting axes (SV22)
1 to 4
5 to 12
13 to 28
Number of setting axes (SV13)
1 to 6
7 to 18
19 to 32
Operation cycle [ms]
0.44
0.88
1.77
29 to 32
1 to 4
5 to 8
1 to 6
7 to 8
0.44
0.88
3.55
(2) CPU processing time [ms]
The instruction processing time means the time until the content is reflected to
servo amplifier side after each instruction is executed.
(Including the transmission time between Motion controller and servo amplifier.)
Q173DCPU/ Q172DCPU
Operation cycle [ms]
"WAIT ON/OFF"
+ Motion control step
Servo program start
Only Motion control step
0.44
0.88
1.77
3.55
7.11
14.2
0.88
1.77
2.66
4.44
7.99
15.11
1.0 to 1.4 1.9 to 2.8 2.8 to 4.6 4.6 to 8.2 8.1 to 15.2 15.2 to 29.4
processing time (Note-1) Dedicated instruction
(D(P).SVST) from the
2.2 to 3.1 3.5 to 4.4 5.3 to 6.2 8.8 to 9.7 16.0 to 16.9 30.2 to 31.1
PLC CPU
Instruction (CHGV) from
Speed change
response time
the Motion SFC
0.8 to 1.3 1.7 to 2.6 2.6 to 4.4 4.4 to 8.0 8.0 to 15.1 15.1 to 29.3
Dedicated instruction
(D(P).CHGV) from the
1.7 to 2.6 2.6 to 3.5 3.5 to 4.4 5.3 to 6.2
8.9 to 9.8
16.0 to 16.9
0.8 to 1.3 1.7 to 2.6 2.6 to 4.4 4.4 to 8.0 4.4 to 11.5
4.4 to 18.6
1.7 to 2.6 2.6 to 3.5 3.5 to 4.4 5.3 to 6.2
5.3 to 16.0
PLC CPU
Instruction (CHGT) from
Torque limit value
change response time
the Motion SFC
Dedicated instruction
(D(P).CHGT) from the
5.3 to 9.7
PLC CPU
Time from PLC ready flag (M2000) ON to
22 to 28
PCPU ready flag (SM500) ON
(Note-1): FEED instruction varies greatly depending on the condition (whether other axes are operating or being stopped).
APP - 46
APPENDICES
APPENDIX 5 Device List
(1) Axis status list
Axis No.
Device No.
1
M2400 to M2419
Signal name
2
M2420 to M2439
3
M2440 to M2459
4
M2460 to M2479
0
Positioning start complete
5
M2480 to M2499
1
Positioning complete
6
M2500 to M2519
2
In-position
7
M2520 to M2539
3
Command in-position
Signal name
Refresh cycle
Fetch cycle
Signal direction
Operation cycle
8
M2540 to M2559
4
Speed controlling
9
M2560 to M2579
5
Speed/position switching latch
10
M2580 to M2599
6
Zero pass
11
M2600 to M2619
7
Error detection
12
M2620 to M2639
8
Servo error detection
13
M2640 to M2659
9
Home position return request
14
M2660 to M2679
10
Home position return complete
15
M2680 to M2699
11
16
M2700 to M2719
12
17
M2720 to M2739
13
Immediate
Status signal
Operation cycle
Main cycle
Operation cycle
FLS
External RLS
signals STOP
Main cycle
18
M2740 to M2759
14
19
M2760 to M2779
15
Servo ready
DOG/CHANGE
20
M2780 to M2799
16
Torque limiting
21
M2800 to M2819
17
Unusable
22
M2820 to M2839
23
M2840 to M2859
18
24
M2860 to M2879
Virtual mode continuation
operation disable warning
(Note-1)
signal (SV22)
At virtual mode
transition
25
M2880 to M2899
19
M-code outputting signal
Operation cycle
26
M2900 to M2919
27
M2920 to M2939
28
M2940 to M2959
29
M2960 to M2979
30
M2980 to M2999
31
M3000 to M3019
32
M3020 to M3039
Operation cycle
—
—
—
Status signal
(Note-1): It is unusable in the SV13/SV22 real mode.
POINT
(1) The range of axis No.1 to 8 is valid in the Q172DCPU.
(2) The device area more than 9 axes as an user device in the Q172DCPU.
However, when the project of Q172DCPU is replaced with Q173DCPU, this area
cannot be used.
APP - 47
APPENDICES
(2) Axis command signal list
Axis No.
Device No.
1
M3200 to M3219
2
M3220 to M3239
3
M3240 to M3259
Signal name
Signal name
4
M3260 to M3279
0
Stop command
5
M3280 to M3299
1
Rapid stop command
6
M3300 to M3319
2
Forward rotation JOG start command
7
M3320 to M3339
3
Reverse rotation JOG start command
8
M3340 to M3359
4
Complete signal OFF command
9
M3360 to M3379
10
M3380 to M3399
5
Speed/position switching enable
command
Refresh cycle
Fetch cycle
Signal
direction
Operation cycle
11
M3400 to M3419
6
Unusable
12
M3420 to M3439
7
Error reset command
13
M3440 to M3459
8
Servo error reset command
14
M3460 to M3479
15
M3480 to M3499
9
External stop input disable at start
command
16
M3500 to M3519
10
17
M3520 to M3539
11
18
M3540 to M3559
19
M3560 to M3579
20
M3580 to M3599
21
M3600 to M3619
22
M3620 to M3639
23
M3640 to M3659
Main cycle
Command
signal
Operation cycle
Main cycle
At start
Command
signal
Unusable
12
Feed current value update request
command
13
Address clutch reference setting
(Note-1)
command (SV22 only)
Cam reference position setting
14
(Note-1)
command (SV22 only)
24
M3660 to M3679
15 Servo OFF command
25
M3680 to M3699
16 Gain changing command
At start
At virtual mode
transition
Command
signal
Operation cycle
26
M3700 to M3719
17 Unusable
27
M3720 to M3739
18 Control loop changing command
28
M3740 to M3759
29
M3760 to M3779
30
M3780 to M3799
31
M3800 to M3819
32
M3820 to M3839
Operation cycle
(Note-2)
Operation cycle
19 FIN signal
Command
signal
(Note-1): It is unusable in the SV13/SV22 real mode.
(Note-2): Operation cycle 7.1[ms] or more: Every 3.5[ms]
POINT
(1) The range of axis No.1 to 8 is valid in the Q172DCPU.
(2) The device area more than 9 axes as an user device in the Q172DCPU.
However, when the project of Q172DCPU is replaced with Q173DCPU, this area
cannot be used.
APP - 48
APPENDICES
(3) Common device list
Device
Signal name
No.
Refresh cycle
M2000 PLC ready flag
Fetch cycle
Main cycle
Signal
Remark
Device
direction
(Note-4)
No.
M3072
M2053
Command
signal
M2001 Axis 1
Signal name
Manual pulse generator 3
M2003 Axis 3
M2055
M2004 Axis 4
M2056
M2005 Axis 5
M2057 Unusable
M2006 Axis 6
M2058 (6 points)
M2007 Axis 7
M2059
M2008 Axis 8
M2060
M2009 Axis 9
M2061 Axis 1
M2010 Axis 10
M2062 Axis 2
M2011 Axis 11
M2063 Axis 3
M2012 Axis 12
M2064 Axis 4
M2013 Axis 13
M2065 Axis 5
M2014 Axis 14
M2017 Axis 17
Start accept flag
Operation cycle
M2018 Axis 18
Status
M2067 Axis 7
signal
M2068 Axis 8
(Note-1),
M2069 Axis 9
(Note-2)
M2070 Axis 10
M2019 Axis 19
M2071 Axis 11
M2020 Axis 20
M2072 Axis 12
M2021 Axis 21
M2073 Axis 13
M2022 Axis 22
M2074 Axis 14
M2023 Axis 23
M2075 Axis 15
M2024 Axis 24
M2076 Axis 16 Speed changing
M2025 Axis 25
M2077 Axis 17 accepting flag
M2026 Axis 26
M2078 Axis 18
M2027 Axis 27
M2079 Axis 19
M2028 Axis 28
M2080 Axis 20
M2029 Axis 29
M2081 Axis 21
M2030 Axis 30
M2082 Axis 22
M2031 Axis 31
M2083 Axis 23
M2032 Axis 32
M2084 Axis 24
M2033 Unusable
M2034 (2 points)
M2035
—
Motion error history clear
M2037 (2 points)
M2038 Motion SFC debugging flag
—
Immediate
Speed switching point specified
At start
flag
M2044
—
Command
signal
—
—
M3080
—
Operation cycle
Operation cycle
Real mode/virtual mode
At virtual mode
switching request (SV22)
transition
Command
signal
—
—
—
signal
Manual pulse generator 2
enable flag
M2087 Axis 27
M2088 Axis 28
M2089 Axis 29
M2090 Axis 30
M2095
M2097 (8 points)
signal
M2098
signal
transition
M3074
M3075
—
—
—
—
M2099
M2100
M2101 Axis 1
M2104 Axis 4
Synchronous
Status
M2105 Axis 5
encoder current
signal
M2106 Axis 6
value changing flag
M2107 Axis 7
(Note-3)
M2109 Axis 9
Main cycle
Command
signal
signal
(Note-1),
(Note-2)
—
Main cycle
Command
signal
M2111 Axis 11
M2112 Axis 12
M2113
signal
—
(12 axes)
M2110 Axis 10
M3076
Status
Operation cycle
—
Status
Operation cycle
M2108 Axis 8
Operation cycle
Manual pulse generator 1
enable flag
M2086 Axis 26
M2103 Axis 3
start command
M2050 Unusable
M2085 Axis 25
M2096 Unusable
At virtual mode
JOG operation simultaneous
M2049 All axes servo ON accept flag
(Note-2)
Status
Command
signal
(Note-1),
M2094
M3073
M2046 Out-of-sync warning (SV22)
M2047 Motion slot fault detection flag
Status
Operation cycle
M2102 Axis 2
signal (SV22)
M2052
M3079
M2093
switching status (SV22)
M2045 switching error detection
M2051
signal
M2092 Axis 32
signal
Real mode/virtual mode
Real mode/virtual mode
M2048
Command
M2091 Axis 31
Status
transition
M2042 All axes servo ON command
M2043
—
At debugging mode
M2039 Motion error detection flag
M2041 System setting error flag
—
Main cycle
request flag
M2036 Unusable
M2040
Remark
(Note-4)
Status
Operation cycle
—
Signal
direction
M2066 Axis 6
M2015 Axis 15
M2016 Axis 16
Fetch cycle
Main cycle
enable flag
M2054 Operation cycle over flag
M2002 Axis 2
Refresh cycle
—
M3077
M3078
M2114
M2115
M2116
M2117
M2118
APP - 49
Unusable
(6 points)
—
—
—
—
APPENDICES
Common device list (Continued)
Device
Signal name
No.
Refresh cycle
Fetch cycle
Signal
Remark
Device
direction
(Note-4)
No.
M2119
M2188
M2120
M2189
M2121
M2122
M2123
M2124
Signal name
(9 points)
—
—
—
—
—
—
—
—
M2191
—
—
—
—
M2192
M2193
M2194
M2126
M2195
M2127
M2196
M2128 Axis 1
M2197
M2129 Axis 2
M2198
M2130 Axis 3
M2199
M2131 Axis 4
M2200
M2132 Axis 5
M2201
M2133 Axis 6
M2202
M2134 Axis 7
M2203
M2135 Axis 8
M2204
M2136 Axis 9
M2205
M2137 Axis 10
M2206
M2138 Axis 11
M2207
M2139 Axis 12
M2208
M2140 Axis 13
M2209
M2141 Axis 14
Unusable
(36 points)
(Note-5)
M2210
M2142 Axis 15
M2143 Axis 16
Automatic
M2144 Axis 17
decelerating flag
Operation cycle
M2145 Axis 18
Status
M2211
signal
M2212
(Note-1),
M2213
(Note-2)
M2214
M2146 Axis 19
M2215
M2147 Axis 20
M2216
M2148 Axis 21
M2217
M2149 Axis 22
M2218
M2150 Axis 23
M2219
M2151 Axis 24
M2220
M2152 Axis 25
M2221
M2153 Axis 26
M2222
M2154 Axis 27
M2223
M2155 Axis 28
M2224
M2156 Axis 29
M2225
M2157 Axis 30
M2226
M2158 Axis 31
M2227
M2159 Axis 32
M2228
M2160
M2229
M2161
M2230
M2162
M2163
M2231 Unusable
M2232 (16 points)
M2164
M2233
M2165
M2234
M2166
M2235
M2167
M2236
M2168
M2237
M2169
M2238
M2170
M2239
M2171
M2240 Axis 1
M2172
M2174
Remark
(Note-4)
Fetch cycle
M2190
Unusable
M2125
M2173
Signal
direction
Refresh cycle
M2241 Axis 2
Unusable
(28 points)
(Note-5)
—
—
—
—
M2242 Axis 3
M2243 Axis 4
M2175
M2244 Axis 5
M2176
M2245 Axis 6
M2177
M2246 Axis 7
M2178
M2247 Axis 8
M2179
M2248 Axis 9
M2180
M2249 Axis 10
M2181
M2250 Axis 11
M2182
M2251 Axis 12
M2183
M2252 Axis 13
M2184
M2253 Axis 14
M2185
M2254 Axis 15
M2186
M2255 Axis 16
M2187
M2256 Axis 17
APP - 50
Status
Speed change "0"
accepting flag
Operation cycle
signal
(Note-1),
(Note-2)
APPENDICES
Common device list (Continued)
Device
No.
Signal name
Refresh cycle
Fetch cycle
Signal
Remark
Device
direction
(Note-4)
No.
M2257 Axis 18
M2289 Axis 18
M2258 Axis 19
M2290 Axis 19
M2259 Axis 20
M2291 Axis 20
M2260 Axis 21
M2292 Axis 21
M2261 Axis 22
M2293 Axis 22
M2262 Axis 23
M2263 Axis 24
M2264 Axis 25
M2265 Axis 26
M2295 Axis 24
M2296 Axis 25
accepting flag
M2297 Axis 26
M2298 Axis 27
M2267 Axis 28
M2299 Axis 28
M2268 Axis 29
M2300 Axis 29
M2269 Axis 30
M2301 Axis 30
M2270 Axis 31
M2272 Axis 1
Operation cycle
M2273 Axis 2
M2274 Axis 3
Status
M2303 Axis 32
signal
M2304
(Note-1),
M2305
(Note-2)
M2306
M2275 Axis 4
M2307
M2276 Axis 5
M2308
M2277 Axis 6
M2309
M2278 Axis 7
M2281 Axis 10
Fetch cycle
Signal
Remark
direction
(Note-4)
Status
Control loop
monitor status
signal
Operation cycle
(Note-1),
(Note-2)
M2302 Axis 31
M2271 Axis 32
M2280 Axis 9
Refresh cycle
M2294 Axis 23
Speed change "0"
M2266 Axis 27
M2279 Axis 8
Signal name
M2310
Control loop
monitor status
M2311 Unusable
M2312 (16 points)
—
—
—
—
M2313
M2282 Axis 11
M2314
M2283 Axis 12
M2315
M2284 Axis 13
M2316
M2285 Axis 14
M2317
M2286 Axis 15
M2318
M2287 Axis 16
M2319
M2288 Axis 17
(Note-1): The range of axis No.1 to 8 is valid in the Q172DCPU.
(Note-2): Device area of 9 axes or more is unusable in the Q172DCPU.
(Note-3): This signal is unusable in the SV13/SV22 real mode.
(Note-4): It can also be ordered the device of a remark column.
(Note-5): These devices can be used as the clutch statuses.
The clutch status can also be set as the optional device at the clutch parameter.
Refer to Chapter 7 of the "Q173DCPU/Q172DCPU Motion controller (SV22)
Programming Manual (VIRTUAL MODE)" for details.
APP - 51
APPENDICES
(4) Common device list (Command signal)
Device No.
Signal name
M3072
PLC ready flag
M3073
Speed switching point specified flag
M3074
All axes servo ON command
M3075
Real mode/virtual mode switching
request (SV22)
Refresh cycle
Fetch cycle
Signal direction
Remark
(Note-1), (Note-2)
Main cycle
M2000
At start
M2040
Operation
cycle
M2042
At virtual mode
transition
M2043
Command
signal
M3076
JOG operation simultaneous start
command
M3077
Manual pulse generator 1 enable flag
M3078
Manual pulse generator 2 enable flag
M3079
Manual pulse generator 3 enable flag
M2053
M3080
Motion error history clear request flag
M2035
M3081
to
Unusable
M2048
M2051
Main cycle
M2052
(Note-3)
—
(55 points)
—
—
—
M3135
(Note-1): The state of a device is not in agreement when the device of a remark column is turned ON/OFF directly. In addition,
when the request from a data register and the request from the above device are performed simultaneously, the request
from the above device becomes effective.
(Note-2): It can also be ordered the device of a remark column.
(Note-3): Do not use it as an user device. It is possible to use it as a device which does automatic refresh because it becomes a
reserve aria for command signal.
POINT
The device of a remark column turns ON by OFF to ON of the above device, and
turns OFF by ON to OFF of the above device.
The command signal cannot be turned ON/OFF by the PLC CPU in the automatic
refresh because the statuses and commands are mixed together in M2000 to
M2053. Use the above devices in the case.
And, it can also be turned ON/OFF by the data register. (Refer to Section 3.2.3)
APP - 52
APPENDICES
(5) Axis monitor device list
Axis
No.
Device No.
Signal name
1
D0 to D19
2
D20 to D39
3
D40 to D59
4
D60 to D79
0
5
D80 to D99
1
6
D100 to D119
2
7
D120 to D139
3
8
D140 to D159
4
9
D160 to D179
5
10
D180 to D199
6 Minor error code
11
D200 to D219
7 Major error code
12
D220 to D239
8 Servo error code
13
D240 to D259
14
D260 to D279
15
D280 to D299
16
D300 to D319
10 Travel value after
11 proximity dog ON
17
D320 to D339
12 Execute program No.
18
D340 to D359
13 M-code
19
D360 to D379
14 Torque limit value
20
D380 to D399
21
D400 to D419
Data set pointer for
15
constant-speed control
22
D420 to D439
16
23
D440 to D459
17
24
D460 to D479
25
D480 to D499
18 Real current value at
19 stop input
26
D500 to D519
27
D520 to D539
28
D540 to D559
29
D560 to D579
30
D580 to D599
31
D600 to D619
32
D620 to D639
Signal name
9
Refresh cycle
Feed current value
Real current value
Unit
Signal
direction
Command
unit
Operation cycle
Deviation counter value
Home position return
re-travel value
Fetch cycle
PLS
Immediate
Main cycle
PLS
Operation cycle
Monitor
device
Command
unit
At start
Operation cycle
%
At start/during start
Unusable
Operation cycle
Command
unit
Monitor
device
(Note-1): It can be used as the travel value change register. The travel value change register can be set to the device optionally in the servo
program.
POINT
(1) The range of axis No.1 to 8 is valid in the Q172DCPU.
(2) The device area more than 9 axes as an user device in the Q172DCPU.
However, when the project of Q172DCPU is replaced with Q173DCPU, this area
cannot be used.
APP - 53
APPENDICES
(6) Control change register list
Axis
No.
Device No.
1
D640, D641
2
D642, D643
3
D644, D645
4
D646, D647
0
5
D648, D649
1
6
D650, D651
7
D652, D653
8
D654, D655
9
D656, D657
10
D658, D659
11
D660, D661
12
D662, D663
13
D664, D665
14
D666, D667
15
D668, D669
16
D670, D671
17
D672, D673
18
D674, D675
19
D676, D677
20
D678, D679
21
D680, D681
22
D682, D683
23
D684, D685
24
D686, D687
25
D688, D689
26
D690, D691
27
D692, D693
28
D694, D695
29
D696, D697
30
D698, D699
31
D700, D701
32
D702, D703
Signal name
Signal name
Refresh cycle
Fetch cycle
At start
JOG speed setting
Unit
Signal
direction
Command Command
unit
device
POINT
(1) The range of axis No.1 to 8 is valid in the Q172DCPU.
(2) The device area more than 9 axes as an user device in the Q172DCPU.
However, when the project of Q172DCPU is replaced with Q173DCPU, this area
cannot be used.
APP - 54
APPENDICES
(7) Common device list
Device
No.
Signal name
Refresh cycle
Fetch cycle
Signal
direction
Device
No.
Signal name
D704
PLC ready flag request
D752
Manual pulse generator 1
smoothing magnification
setting register
D705
Speed switching point
specified flag request
D753
Manual pulse generator 2
smoothing magnification
setting register
D706
All axes servo ON command
request
D754
Manual pulse generator 3
smoothing magnification
setting register
D707
Real mode/virtual mode
switching request (SV22)
D755
Manual pulse generator 1
enable flag request
D708
JOG operation simultaneous
start command request
D756
Manual pulse generator 2
enable flag request
D757
Manual pulse generator 3
enable flag request
D709
Unusable
Main cycle
—
—
Command
device
—
D710
D711
D712
JOG operation simultaneous
start axis setting register
D764
D766
D719
Manual pulse generator axis
3 No. setting register
D720
Axis 1
D768
D721
Axis 2
D769
D722
Axis 3
D770
D723
Axis 4
D771
D724
Axis 5
D772
D725
Axis 6
D773
D726
Axis 7
D774
D727
Axis 8
D775
D728
Axis 9
D776
D729
Axis 10
D730
Axis 11
D731
Axis 12
D732
Axis 13
D733
Axis 14
D734
Axis 15
D735
Axis 16
D736
Axis 17
D737
Axis 18
D738
Axis 19
D786
D739
Axis 20
D787
D740
Axis 21
D788
D741
Axis 22
D789
D742
Axis 23
D790
D743
Axis 24
D791
D744
Axis 25
D792
D745
Axis 26
D793
D746
Axis 27
D794
D747
Axis 28
D795
D748
Axis 29
D796
D749
Axis 30
D797
D750
Axis 31
D798
D751
Axis 32
D799
D718
Command
device
Main cycle
D760
Manual pulse generator axis
2 No. setting register
D717
At the manual pulse
generator enable flag
D761
D762
D716
Signal
direction
D759
At start
Manual pulse generator axis
1 No. setting register
D715
Fetch cycle
D758
D713
D714
Refresh cycle
D763
D765
D767
D777
Command
device
At the manual pulse
generator enable flag
Manual pulse
generators 1 pulse
input magnification
setting register
(Note-1), (Note-2)
D778
D779
Unusable
(42 points)
—
—
—
D780
D781
D782
D783
D784
D785
(Note-1): The range of axis No.1 to 8 is valid in the Q172DCPU.
(Note-2): Device area of 9 axes or more is unusable in the Q172DCPU.
APP - 55
APPENDICES
(8) Motion register list (#)
Axis
No.
Device No.
1
#8000 to #8019
2
#8020 to #8039
3
#8040 to #8059
4
#8060 to #8079
0
Servo amplifier type
5
#8080 to #8099
1
Motor current
6
#8100 to #8119
2
7
#8120 to #8139
3
8
#8140 to #8159
4
9
#8160 to #8179
5
10
#8180 to #8199
6
11
#8200 to #8219
7
12
#8220 to #8239
8
13
#8240 to #8259
9
14
#8260 to #8279
10
15
#8280 to #8299
11
16
#8300 to #8319
12
17
#8320 to #8339
13
18
#8340 to #8359
14
19
#8360 to #8379
15
20
#8380 to #8399
16
21
#8400 to #8419
17
22
#8420 to #8439
18
23
#8440 to #8459
19
24
#8460 to #8479
25
#8480 to #8499
26
#8500 to #8519
27
#8520 to #8539
28
#8540 to #8559
29
#8560 to #8579
30
#8580 to #8599
31
#8600 to #8619
32
#8620 to #8639
Signal name
Signal name
Motor speed
Refresh cycle
Signal direction
When the servo amplifier power-on
Operation cycle 1.7[ms] or less: Operation cycle
Operation cycle 3.5[ms] or more: 3.5[ms]
Monitor device
Command speed
Operation cycle
Home position return re-travel
At home position return re-travel
value
Unusable
APP - 56
APPENDICES
(9) Special relay list
Device No.
Signal name
Refresh cycle
SM500
PCPU REDAY complete flag
SM501
TEST mode ON flag
SM502
External forced stop input flag
SM503
Digital oscilloscope executing flag
SM510
TEST mode request error flag
SM512
Motion CPU WDT error flag
SM513
Manual pulse generator axis setting error flag
SM516
Servo program setting error flag
Fetch cycle
Main cycle
Signal type
Status signal
(10) Special register list
Device No.
SD200
SD500
SD501
SD502
SD503
SD504
SD505
SD506
SD508
SD510
SD511
SD512
SD513
SD514
SD515
Signal name
Refresh cycle
Fetch cycle
Signal direction
State of switch
Real mode axis information register (SV22)
Servo amplifier loading information
Real mode/virtual mode switching error
information (SV22)
Connect/disconnect (status)
Test mode request error information
Motion CPU WDT error cause
Manual pulse generator axis setting error
information
SD516
Error program No.
SD517
Error item information
SD522
Motion operation cycle
SD523
Operation cycle of the Motion CPU setting
SD803
Connect/disconnect (command)
Main cycle
At power supply on/
operation cycle
At virtual mode transition
Main cycle
Monitor device
At test mode request
At Motion CPU
WDT error occurrence
At the manual pulse generator
enable flag
At start
Operation cycle
At power supply on
Main cycle
APP - 57
Command device
WARRANTY
Please confirm the following product warranty details before using this product.
1. Gratis Warranty Term and Gratis Warranty Range
If any faults or defects (hereinafter "Failure") found to be the responsibility of Mitsubishi occurs during use of the
product within the gratis warranty term, the product shall be repaired at no cost via the sales representative or
Mitsubishi Service Company.
However, if repairs are required onsite at domestic or overseas location, expenses to send an engineer will be solely
at the customer's discretion. Mitsubishi shall not be held responsible for any re-commissioning, maintenance, or
testing on-site that involves replacement of the failed module.
[Gratis Warranty Term]
Note that an installation period of less than one year after installation in your company or your customer’s premises
or a period of less than 18 months (counted from the date of production) after shipment from our company,
whichever is shorter, is selected.
[Gratis Warranty Range]
(1) Diagnosis of failure
As a general rule, diagnosis of failure is done on site by the customer.
However, Mitsubishi or Mitsubishi service network can perform this service for an agreed upon fee upon the
customer’s request.
There will be no charges if the cause of the breakdown is found to be the fault of Mitsubishi.
(2) Breakdown repairs
There will be a charge for breakdown repairs, exchange replacements and on site visits for the following four
conditions, otherwise there will be a charge.
1) Breakdowns due to improper storage, handling, careless accident, software or hardware design by the
customer
2) Breakdowns due to modifications of the product without the consent of the manufacturer
3) Breakdowns resulting from using the product outside the specified specifications of the product
4) Breakdowns that are outside the terms of warranty
Since the above services are limited to Japan, diagnosis of failures, etc. are not performed abroad.
If you desire the after service abroad, please register with Mitsubishi. For details, consult us in advance.
2. Exclusion of Loss in Opportunity and Secondary Loss from Warranty Liability
Mitsubishi will not be held liable for damage caused by factors found not to be the cause of Mitsubishi; opportunity
loss or lost profits caused by faults in the Mitsubishi products; damage, secondary damage, accident compensation
caused by special factors unpredictable by Mitsubishi; damages to products other than Mitsubishi products; and to
other duties.
3. Onerous Repair Term after Discontinuation of Production
Mitsubishi shall accept onerous product repairs for seven years after production of the product is discontinued.
4. Delivery Term
In regard to the standard product, Mitsubishi shall deliver the standard product without application settings or
adjustments to the customer and Mitsubishi is not liable for on site adjustment or test run of the product.
5. Precautions for Choosing the Products
(1) These products have been manufactured as a general-purpose part for general industries, and have not been
designed or manufactured to be incorporated in a device or system used in purposes related to human life.
(2) Before using the products for special purposes such as nuclear power, electric power, aerospace, medicine,
passenger movement vehicles or under water relays, contact Mitsubishi.
(3) These products have been manufactured under strict quality control. However, when installing the product where
major accidents or losses could occur if the product fails, install appropriate backup or failsafe functions in the
system.
(4) When exporting any of the products or related technologies described in this catalogue, you must obtain an
export license if it is subject to Japanese Export Control Law.
MOTION CONTROLLER Qseries
SV13/SV22 Programming Manual(REAL MODE)
(Q173DCPU/Q172DCPU)
HEAD OFFICE : TOKYO BUILDING, 2-7-3 MARUNOUCHI, CHIYODA-KU, TOKYO 100-8310, JAPAN
MODEL
Q173D-P-SV13/22REALE
MODEL
CODE
1XB930
IB(NA)-0300136-A(0801)MEE
IB(NA)-0300136-A(0801)MEE
When exported from Japan, this manual does not require application to the
Ministry of Economy, Trade and Industry for service transaction permission.
Specifications subject to change without notice.
MITSUBISHI ELECTRIC
HEADQUARTERS
EUROPEAN REPRESENTATIVES
EUROPEAN REPRESENTATIVES
MITSUBISHI ELECTRIC EUROPE B.V.
EUROPE
German Branch
Gothaer Straße 8
D-40880 Ratingen
Phone: +49 (0)2102 / 486-0
Fax: +49 (0)2102 / 486-1120
MITSUBISHI ELECTRIC EUROPE B.V. CZECH REPUBLIC
Czech Branch
Avenir Business Park, Radlická 714/113a
CZ-158 00 Praha 5
Phone: +420 (0)251 551 470
Fax: +420 (0)251-551-471
MITSUBISHI ELECTRIC EUROPE B.V.
FRANCE
French Branch
25, Boulevard des Bouvets
F-92741 Nanterre Cedex
Phone: +33 (0)1 / 55 68 55 68
Fax: +33 (0)1 / 55 68 57 57
MITSUBISHI ELECTRIC EUROPE B.V.
IRELAND
Irish Branch
Westgate Business Park, Ballymount
IRL-Dublin 24
Phone: +353 (0)1 4198800
Fax: +353 (0)1 4198890
MITSUBISHI ELECTRIC EUROPE B.V.
ITALY
Italian Branch
Viale Colleoni 7
I-20041 Agrate Brianza (MI)
Phone: +39 039 / 60 53 1
Fax: +39 039 / 60 53 312
MITSUBISHI ELECTRIC EUROPE B.V.
SPAIN
Spanish Branch
Carretera de Rubí 76-80
E-08190 Sant Cugat del Vallés (Barcelona)
Phone: 902 131121 // +34 935653131
Fax: +34 935891579
MITSUBISHI ELECTRIC EUROPE B.V.
UK
UK Branch
Travellers Lane
UK-Hatfield, Herts. AL10 8XB
Phone: +44 (0)1707 / 27 61 00
Fax: +44 (0)1707 / 27 86 95
JAPAN
MITSUBISHI ELECTRIC CORPORATION
Office Tower “Z” 14 F
8-12,1 chome, Harumi Chuo-Ku
Tokyo 104-6212
Phone: +81 3 622 160 60
Fax: +81 3 622 160 75
MITSUBISHI ELECTRIC AUTOMATION, Inc.
USA
500 Corporate Woods Parkway
Vernon Hills, IL 60061
Phone: +1 847 478 21 00
Fax: +1 847 478 22 53
GEVA
AUSTRIA
Wiener Straße 89
AT-2500 Baden
Phone: +43 (0)2252 / 85 55 20
Fax: +43 (0)2252 / 488 60
TEHNIKON
BELARUS
Oktyabrskaya 16/5, Off. 703-711
BY-220030 Minsk
Phone: +375 (0)17 / 210 46 26
Fax: +375 (0)17 / 210 46 26
Koning & Hartman b.v.
BELGIUM
Woluwelaan 31
BE-1800 Vilvoorde
Phone: +32 (0)2 / 257 02 40
Fax: +32 (0)2 / 257 02 49
INEA BH d.o.o.
BOSNIA AND HERZEGOVINA
Aleja Lipa 56
BA-71000 Sarajevo
Phone: +387 (0)33 / 921 164
Fax: +387 (0)33/ 524 539
AKHNATON
BULGARIA
4 Andrej Ljapchev Blvd. Pb 21
BG-1756 Sofia
Phone: +359 (0)2 / 817 6004
Fax: +359 (0)2 / 97 44 06 1
INEA CR d.o.o.
CROATIA
Losinjska 4 a
HR-10000 Zagreb
Phone: +385 (0)1 / 36 940 - 01/ -02/ -03
Fax: +385 (0)1 / 36 940 - 03
AutoCont C.S. s.r.o.
CZECH REPUBLIC
Technologická 374/6
CZ-708 00 Ostrava-Pustkovec
Phone: +420 595 691 150
Fax: +420 595 691 199
B:TECH A.S.
CZECH REPUBLIC
U Borové 69
CZ-58001 Havlíčkův Brod
Phone: +420 (0)569 777 777
Fax: +420 (0)569-777 778
Beijer Electronics A/S
DENMARK
Lykkegårdsvej 17, 1.
DK-4000 Roskilde
Phone: +45 (0)46/ 75 76 66
Fax: +45 (0)46 / 75 56 26
Beijer Electronics Eesti OÜ
ESTONIA
Pärnu mnt.160i
EE-11317 Tallinn
Phone: +372 (0)6 / 51 81 40
Fax: +372 (0)6 / 51 81 49
Beijer Electronics OY
FINLAND
Jaakonkatu 2
FIN-01620 Vantaa
Phone: +358 (0)207 / 463 500
Fax: +358 (0)207 / 463 501
UTECO A.B.E.E.
GREECE
5, Mavrogenous Str.
GR-18542 Piraeus
Phone: +30 211 / 1206 900
Fax: +30 211 / 1206 999
MELTRADE Ltd.
HUNGARY
Fertő utca 14.
HU-1107 Budapest
Phone: +36 (0)1 / 431-9726
Fax: +36 (0)1 / 431-9727
Beijer Electronics SIA
LATVIA
Vestienas iela 2
LV-1035 Riga
Phone: +371 (0)784 / 2280
Fax: +371 (0)784 / 2281
Beijer Electronics UAB
LITHUANIA
Savanoriu Pr. 187
LT-02300 Vilnius
Phone: +370 (0)5 / 232 3101
Fax: +370 (0)5 / 232 2980
ALFATRADE Ltd.
MALTA
99, Paola Hill
Malta- Paola PLA 1702
Phone: +356 (0)21 / 697 816
Fax: +356 (0)21 / 697 817
INTEHSIS srl
MOLDOVA
bld. Traian 23/1
MD-2060 Kishinev
Phone: +373 (0)22 / 66 4242
Fax: +373 (0)22 / 66 4280
Koning & Hartman b.v.
NETHERLANDS
Haarlerbergweg 21-23
NL-1101 CH Amsterdam
Phone: +31 (0)20 / 587 76 00
Fax: +31 (0)20 / 587 76 05
Beijer Electronics AS
NORWAY
Postboks 487
NO-3002 Drammen
Phone: +47 (0)32 / 24 30 00
Fax: +47 (0)32 / 84 85 77
MPL Technology Sp. z o.o.
POLAND
Ul. Krakowska 50
PL-32-083 Balice
Phone: +48 (0)12 / 630 47 00
Fax: +48 (0)12 / 630 47 01
Sirius Trading & Services srl
ROMANIA
Aleea Lacul Morii Nr. 3
RO-060841 Bucuresti, Sector 6
Phone: +40 (0)21 / 430 40 06
Fax: +40 (0)21 / 430 40 02
Craft Con. & Engineering d.o.o.
SERBIA
Bulevar Svetog Cara Konstantina 80-86
SER-18106 Nis
Phone:+381 (0)18 / 292-24-4/5
Fax: +381 (0)18 / 292-24-4/5
INEA SR d.o.o.
SERBIA
Izletnicka 10
SER-113000 Smederevo
Phone: +381 (0)26 / 617 163
Fax: +381 (0)26 / 617 163
AutoCont Control s.r.o.
SLOVAKIA
Radlinského 47
SK-02601 Dolny Kubin
Phone: +421 (0)43 / 5868210
Fax: +421 (0)43 / 5868210
CS MTrade Slovensko, s.r.o.
SLOVAKIA
Vajanskeho 58
SK-92101 Piestany
Phone: +421 (0)33 / 7742 760
Fax: +421 (0)33 / 7735 144
INEA d.o.o.
SLOVENIA
Stegne 11
SI-1000 Ljubljana
Phone: +386 (0)1 / 513 8100
Fax: +386 (0)1 / 513 8170
Beijer Electronics AB
SWEDEN
Box 426
SE-20124 Malmö
Phone: +46 (0)40 / 35 86 00
Fax: +46 (0)40 / 35 86 02
Econotec AG
SWITZERLAND
Hinterdorfstr. 12
CH-8309 Nürensdorf
Phone: +41 (0)44 / 838 48 11
Fax: +41 (0)44 / 838 48 12
GTS
TURKEY
Darülaceze Cad. No. 43 KAT. 2
TR-34384 Okmeydanı-Istanbul
Phone: +90 (0)212 / 320 1640
Fax: +90 (0)212 / 320 1649
CSC Automation Ltd.
UKRAINE
4-B, M. Raskovoyi St.
UA-02660 Kiev
Phone: +380 (0)44 / 494 33 55
Fax: +380 (0)44 / 494-33-66
MITSUBISHI
ELECTRIC
FACTORY AUTOMATION
EURASIAN REPRESENTATIVES
Kazpromautomatics Ltd.
Mustafina Str. 7/2
KAZ-470046 Karaganda
Phone: +7 7212 / 50 11 50
Fax: +7 7212 / 50 11 50
KAZAKHSTAN
MIDDLE EAST REPRESENTATIVES
ILAN & GAVISH Ltd.
ISRAEL
24 Shenkar St., Kiryat Arie
IL-49001 Petah-Tiqva
Phone: +972 (0)3 / 922 18 24
Fax: +972 (0)3 / 924 0761
TEXEL ELECTRONICS Ltd.
ISRAEL
2 Ha´umanut, P.O.B. 6272
IL-42160 Netanya
Phone: +972 (0)9 / 863 39 80
Fax: +972 (0)9 / 885 24 30
CEG INTERNATIONAL
LEBANON
Cebaco Center/Block A Autostrade DORA
Lebanon - Beirut
Phone: +961 (0)1 / 240 430
Fax: +961 (0)1 / 240 438
AFRICAN REPRESENTATIVE
CBI Ltd.
Private Bag 2016
ZA-1600 Isando
Phone: + 27 (0)11 / 928 2000
Fax: + 27 (0)11 / 392 2354
SOUTH AFRICA
Mitsubishi Electric Europe B.V. /// FA - European Business Group /// Gothaer Straße 8 /// D-40880 Ratingen /// Germany
Tel.: +49(0)2102-4860 /// Fax: +49(0)2102-4861120 /// [email protected] /// www.mitsubishi-automation.com