1
STE 71367–9
MANUEL D'INSTRUCTIONS
CONTRÔLEUR DE ROBOT TS2000/TS2100
MANUEL D'INTERFACE
Avis
• Assurez-vous que ce manuel d'instructions est livré à
l'utilisateur final du robot industriel de Toshiba Machine.
• Avant d'opérer le robot industriel, veuillez lire et comprendre
entièrement ce manuel.
• Après avoir lu ce manuel, veuillez le garder à portée de
mains pour future référence.
TOSHIBA MACHINE CO., LTD.
NUMAZU, JAPON
全115P
MANUEL D'INTERFACE
Copyright 2004 par Toshiba Machine Co., Ltd.
Tous droits réservés
Toute reproduction d'un extrait quelconque de ce document, par quelque procédé ou
moyen que ce soit, sans la permission écrite de Toshiba Machine Co, Ltd. est interdite.
Les informations contenues dans ce manuel sont sujettes à changement sans avis
préalable pour refléter toute amélioration.
STE 71367
– 2 –
MANUEL D'INTERFACE
Préface
Ce manuel décrit le type, la fonction et les méthodes de manutention des câbles
externes raccordant le contrôleur du robot TS2000/TS2100 aux équipements externes.
Ce manuel est destiné aux designers de systèmes et aux ingénieurs de fabrication.
Le contrôleur de robot TS2000/TS2100 peut travailler conjointement avec les
équipements externes via des signaux entrée / sortie qui peuvent être programmés par
le langage SCOL. Également, les signaux d'entrée du système qui permettent un
fonctionnement externe du contrôleur, les signaux de sortie du système informant un
opérateur de l'état du contrôleur (fonction de traitement de l'automate programmable) et
les signaux entrée et sortie en série qui peuvent être connectés avec un ordinateur hôte,
etc. sont fournis de telle façon que l'utilisateur puisse facilement construire un système
FA.
*
Les manuels d'instructions qui sont référencés dans ce manuel :
• Manuel d'installation et de transport
• Manuel de maintenance
• Manuel de sécurité
• Manuel de paramètres utilisateur
• Manuel de fonction de l'automate programmable simple
• Manuel de commande E/S (Type P)
!
CAUTION
Ce manuel ne contient pas de descriptions détaillées
sur le branchement du robot et son alimentation
électrique.
Pour le branchement de l'alimentation électrique et du
robot, reportez-vous au manuel de transport et
l'installation.
STE 71367
– 3 –
MANUEL D'INTERFACE
Précautions de sécurité
Ce manuel contient d'importantes informations sur le robot et le contrôleur qui vous
permettront d'éviter des blessures aux opérateurs et aux personnes à proximité et des
dommages sur les autres équipements et pour assurer une utilisation correcte de cet
équipement.
Assurez-vous que les détails suivants (indications et symboles) sont bien compris avant
de lire ce manuel. Observez toujours les informations qui sont annotées :
[Explication des indications]
Indication
!
Signification de l'indication
DANGER
!
CAUTION
Ceci signifie qu'une manutention incorrecte peut
conduire à de sérieuses blessures, voire la mort.
Ceci signifie qu'une manutention incorrecte peut
conduire à de sérieuses blessures corporelles *1) ou
des dommages physiques *2)."
*1) Les blessures se rapportent aux blessures, brûlures et chocs électriques, etc., qui
ne nécessitent pas une hospitalisation ou un traitement médical à long terme.
*2) Les dommages physiques se rapportent aux dommages dus à la destruction des
équipements ou des ressources.
[Explication des symboles]
Symbole
Signification du symbole
Ceci signifie que cette action est interdite (ne doit pas être
exécutée).
Les détails de l'action qui est interdite sont indiqués avec des
illustrations ou des mots dans ou proches du symbole.
!
Ceci signifie que cette action est obligatoire (doit être exécutée).
Les détails de l'action qui est obligatoire sont indiqués avec des
illustrations ou des mots dans ou proches du symbole.
!
Ceci signifie danger.
Les détails du danger actuel sont indiqués avec des illustrations
ou des mots dans ou proches du symbole.
!
Ceci signifie précaution.
Les détails de la précaution actuelle sont indiqués avec des
illustrations ou des mots dans ou proches du symbole.
STE 71367
– 4 –
MANUEL D'INTERFACE
!
CAUTION
Lisez attentivement le manuel de consignes de sécurité
fourni séparément avant de commencer à travailler afin
vous assurer que l'opération sera effectuée en toute
sécurité de l'installation du robot à son fonctionnement.
STE 71367
– 5 –
MANUEL D'INTERFACE
[Maintenance et inspection]
Suivez les éléments suivants afin d'utiliser le robot en toute sécurité.
!
DANGER
•
IL NE FAUT PAS incinérer, démonter ou charger les piles.
Sinon, elles peuvent exploser.
!
•
Assurez-vous de couper l'alimentation électrique du contrôleur
en tournant le commutateur principal sur off, avant d'approcher
le robot pour commencer l'inspection ou la maintenance.
Obligatoire
•
Lors du rejet des piles, suivez les réglementations fournies par
l'utilisateur.
Interdit
!
•
L'utilisateur ne devra JAMAIS remplacer ou modifier les
pièces, autres que celles décrites dans le manuel
d'instructions. Autrement, la performance se détériorera,
conduisant à des problèmes.
•
Utilisez toujours les pièces de rechange recommandées par
Toshiba Machine lors du remplacement de pièces.
•
Exécutez la maintenance et l'inspection de manière régulière.
Sinon l'équipement peut subir des dégâts ou des accidents
peuvent se produire.
Démontage interdit
!
Obligatoire
!
CAUTION
CAUTION
Afin d'exécuter la maintenance et l'inspection du robot en
toute sécurité, lisez avec précaution le manuel de
maintenance complet indépendant, avant de commencer
les travaux.
STE 71367
– 6 –
MANUEL D'INTERFACE
Table des matières
Page
1.
Type of External Cable .......................................................................................... 10
1.1
Layout and Name of Connectors ................................................................ 10
1.2
TS2000/TS2100 Power Cable "ACIN CN1" ................................................ 12
1.3
Robot Control Cables.................................................................................. 12
1.3.1 TS2000/TS2100 Motor Drive Cable "MOTOR CN2"....................... 12
1.3.2 TS2000/TS2100 Encoder Cable "CN3" .......................................... 12
1.3.3 TS2000/TS2100 Encoder Cable "CN11" (Option) .......................... 13
1.3.4 Robot Control Signal Cable "CN4".................................................. 13
1.3.5 Robot Control Signal Cable "BRAKE"............................................. 13
1.4
Digital Output Power Select Cable "TB2" (with jumper) .............................. 13
1.5
1.6
1.7
1.8
External I/O Signal Cables .......................................................................... 14
1.5.1 External Input Signal Cable "CN5".................................................. 14
1.5.2 External Output Signal Cable "CN6"............................................... 14
1.5.3 External I/O Signal Cable "CN12"................................................... 14
Serial I/O Signal Cable................................................................................ 15
1.6.1 Serial I/O Signal "COM1"................................................................ 15
1.6.2 Serial I/O Signal "HOST" ................................................................ 15
1.6.3 TCPRGOS "TCPRG"...................................................................... 15
1.6.4 Serial I/O Signal "POD" .................................................................. 16
Teach Pendant Cable "TP" ......................................................................... 16
Remote I/O Cable "EXT–I/O" ...................................................................... 16
2.
Connecting Power Cable ....................................................................................... 18
3.
Connecting Robot Control Cable ........................................................................... 19
3.1
Connecting Motor Drive Cable .................................................................... 19
3.2
Connecting Encoder Cable ......................................................................... 21
3.2.1 Connecting Encoder Cable............................................................. 21
3.2.2 Connecting Encoder Cable (Option) ............................................... 22
3.3
Connecting Robot Control Signal Cable...................................................... 23
STE 71367
– 7 –
MANUEL D'INTERFACE
Page
4.
Connecting External I/O Signal Cable.................................................................... 29
4.1
Connecting External Input Signal Cable...................................................... 29
4.2
Connecting External Output Signal Cable................................................... 33
4.3
Connecting External I/O Signal Cable......................................................... 37
4.4
Digital Input Signal ...................................................................................... 41
4.5
System Input Signal .................................................................................... 45
4.6
Jumper of Safety Measure Signal ............................................................... 69
4.7
Digital Output Signal ................................................................................... 71
4.8
System Output Signal ................................................................................. 75
4.9
Fabricating External I/O Signal Cable ......................................................... 92
4.10 Attaching and Detaching External I/O Signal Cable .................................... 94
4.11 Example of Controller Operation, Using External Signals ........................... 95
5.
Connecting Serial Signal Cable ........................................................................... 100
5.1
Connecting Serial I/O Signal Cables COM1, HOST, TCPRG, POD and
COM2 (Option) .................................................................................................... 100
5.2
Attaching and Detaching Serial I/O Signal Cables COM1, HOST, TCPRG,
POD and COM2 (Option)..................................................................................... 102
6.
Connecting TP (Teach Pendant) Cable ............................................................... 103
7.
Connecting EXT–I/O Cable.................................................................................. 106
7.1
Connecting EXT–I/O Cable....................................................................... 106
7.2
EXT–I/O Communication .......................................................................... 111
7.3
8.
Attaching and Detaching EXT–I/O Cable .................................................. 115
Connecting Extension I/O Signal Cable (Option) ................................................. 117
8.1
TR48DIOCN.............................................................................................. 117
8.1.1 Connecting Extension Input Signal Cable..................................... 117
8.1.2 Connecting Extension Output Signal Cable.................................. 120
8.2
TR48DIOC ................................................................................................ 121
8.2.1 Connecting Extension Input Signal Cable..................................... 121
8.2.2 Connecting Extension Output Signal Cable.................................. 124
8.3
Fabricating Extension I/O Signal Cable..................................................... 125
8.4
Attaching and Detaching Extension I/O Signal Cable ............................... 125
STE 71367
– 8 –
MANUEL D'INTERFACE
Page
9.
Connecting High-Speed Input Signal Cable (Option)........................................... 126
9.1
Fabricating High-Speed Input Signal Cable .............................................. 128
9.2
Attaching and Detaching High-Speed Input Signal Cable ......................... 128
11. Connecting Digital Output Power Select Cable.................................................... 131
12. Appendixes .......................................................................................................... 133
12.1 System Signal Table ................................................................................. 133
12.2 Fabricating Cable Using D-SUB Connector .............................................. 138
12.3 Fabricating Cable Using Half-Pitch Connector .......................................... 139
STE 71367
– 9 –
MANUEL D'INTERFACE
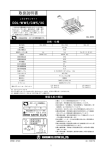
1.
1.1
Type de câble externe
Implantations et noms des connecteurs
Le contrôleur de robot TS2000/TS2100 est connecté au robot et aux équipements
extérieurs, en utilisant des connecteurs et des blocs de bornes fournis sur les côtés
avant et arrière du contrôleur.
TOSHIBA MACHINE
12
EMERGENCY
INTERNAL
EXT
TEACHING
POWER
COM1
13
EXT.SIGNAL
EXT.HOST
HOST
MODE
14
TCPRG
SERVO
ON
SERVO
OFF
POD
RUN
STOP
CYCLE
15
UF1
TP
SELECT
LIN
USER
ALARM
RESET
TP
disconnect
UF2
16
ALARM
Robot Controller
TS2000
4
5
3
6
C N6
C N5
C N3
2
7
C N4
C N11
8
C N12
9
24V 0V A
FG
B
1
B RAKE
TB2
10
11
Fig. 1.1
Implantation et noms des connecteurs
STE 71367
– 10 –
MANUEL D'INTERFACE
Fig. 1.2
Implantation et noms des connecteurs
STE 71367
– 11 –
MANUEL D'INTERFACE
1.2
Câble de puissance électrique TS2000/TS2100 : "ACIN CN1"
Fig. 1.1/Fig.1.2–[1] (avec connecteur)
TS2000:Le câble de raccordement électrique est une interface alimentant
l'alimentation électrique (2 phases, CA 180/250 V, 50/60 Hz) sur le contrôleur du
robot TS2000.
TS2100:Le câble de raccordement électrique est une interface alimentant
l'alimentation électrique principale (3 phases, CA 180/250 V, 50/60 Hz) au contrôleur
du robot TS2100.
Le connecteur "ACIN CN1" est utilisé.
TS2100:Le câble de raccordement électrique est une interface alimentant
l'alimentation électrique principale (3 phases, CA 180/250 V, 50/60 Hz). C'est une
spécification en option.
Pour de plus amples détails, reportez-vous au manuel d'installation et de transport,
fourni séparément.
1.3
Câbles de commande de robot
1.3.1
Câble de puissance du moteur TS2000/TS2100 "MOTOR CN2"
Fig. 1.1/Fig.1.2–[2] (avec câble)
Le câble de puissance du moteur raccorde le contrôleur du robot TS2000/TS2100
et le robot.
Il alimente une alimentation électrique triphasée CA pour chacun des moteurs de
puissance d'axe du robot.
Le connecteur "MOTOR CN2" est utilisé.
Pour de plus amples détails, reportez-vous au manuel d'installation et de transport,
fourni séparément.
1.3.2
Câble d'encodeur TS2000/TS2100 : "CN3"
Fig. 1.1/Fig.1.2–[4] (avec câble)
Le câble d'encodeur est une interface qui entre le signal de l'encodeur de détection
de l'axe de rotation (axe 1 à axe 4) de chacun des axes du robot au contrôleur de
robot TS2000/TS2100. Le connecteur "CN3" est utilisé.
Pour de plus amples détails, reportez-vous au manuel d'installation et de transport,
fourni séparément.
STE 71367
– 12 –
MANUEL D'INTERFACE
1.3.3
Câble d'encodeur TS2000/TS2100 : "CN11" (option)
Fig. 1.1/Fig.1.2–[3] (avec câble)
Le câble d'encodeur est une interface qui entre le signal de l'encodeur de détection
de l'axe de rotation (axe 5) de l'axe du robot au contrôleur de robot
TS2000/TS2100.
Le connecteur "CN11" est utilisé.
1.3.4
Connexion du câble de signal de commande du robot "CN4"
Fig. 1.1/Fig.1.2–[7] (avec câble)
Ce câble est utilisé pour appliquer et relâcher le frein d'immobilisation de l'arbre du
moteur du robot et permet d'avoir les signaux d'entrée / de sortie tels que ceux du
fonctionnement manuel. Parmi les câble de signal de commande du robot, les
câbles de signal E/S pour la commande d'effecteur terminal manuel tel que la main
du robot puissent être contrôlés par le programme de langage de robot. Ils
peuvent également être arrêtés et mis e marche via le boîtier de commande
suspendu d'apprentissage.
Le connecteur "CN4" est utilisé.
Pour de plus amples détails, reportez-vous au manuel d'installation et de transport,
fourni séparément.
Pour le langage du robot, reportez-vous au manuel de langage du robot. Pour le
fonctionnement des signaux d'entrée et de sortie à partir du boîtier de commande
suspendu d'apprentissage, reportez-vous au manuel de fonctionnement.
1.3.5
Câble de signal de commande du robot "BRAKE" (FREIN)
Fig. 1.1/Fig.1.2–[10] (Câble en option.)
Indépendant du câble "CN4" décrit dans le paragraphe 1.3.4 ci-dessus, ce câble
est utilisé pour appliquer et relâcher le frein immobilisant l'arbre de moteur du robot.
Le connecteur "BRAKE" est utilisé.
Lorsque ce câble de signal est utilisé, le côté du robot est également adressé, en
option.
1.4
Câble de sélection de puissance de sortie numérique "TB2" (avec cavalier)
Fig. 1.1/Fig.1.2–[11]
C'est le bloc de bornes pour la sélection de la puissance (P24 V) pour la sortie
STE 71367
– 13 –
MANUEL D'INTERFACE
numérique (32 numéros) du contrôleur de robot TS2000/TS2100. Lorsqu'une
source d'alimentation électrique (P24 V) externe est utilisée, la puissance est fournie
à partir de ce bloc de bornes.
1.5
Câbles de signal E/S externe
1.5.1
Câble de signal d'entrée externe "CN5"
Fig. 1.1/Fig.1.2–[5] (avec connecteur obturateur)
Ce câble est utilisé pour entrer le signal numérique de l'équipement externe sur le
contrôleur de robot TS2000/TS2100.
Le signal d'entrée externe est décomposé en vingt-quatre (24) signaux d'entrée
numériques qui peuvent être programmés par l'utilisateur, en utilisant le langage
SCOL et dix (10) signaux d'entrée de fonctionnement externe qui permettent le
fonctionnement du contrôleur à partir d'un équipement externe. Ce signal avec le
signal de sortie externe du paragraphe 1.5.2, permet au contrôleur du robot de
travailler avec un équipement externe.
Le connecteur "CN5" est utilisé.
1.5.2
Câble de signal de sortie externe "CN6"
Fig. 1.1/Fig.1.2–[6] (avec connecteur obturateur)
Le câble de signal de sortie externe est une interface qui sort le signal numérique
du robot au contrôleur de robot TS2000/TS2100 sur l'équipement externe.
Le signal d'entrée externe est décomposé en seize (16) signaux de sortie
numériques qui peuvent être programmés par l'utilisateur, en utilisant le langage
SCOL et douze (12) signaux de sortie de fonctionnement externe qui permettent
d'indiquer l'état du contrôleur sur un équipement externe.
Ce signal avec le signal de sortie externe du paragraphe 1.5.1, permet au contrôleur
du robot de travailler avec un équipement externe.
En outre, quatre (4) signaux supplémentaires du servo ON externe, du servo OFF
externe et des arrêts d'urgence externe 1 & 2 sont transmis dans ce câble.
Le connecteur "CN6" est utilisé.
1.5.3
Câble de signal E/S externe "CN12"
Fig. 1.1/Fig.1.2–[8]
Le câble de signal E/S externe est une interface qui permet d'entrer le signal
numérique des équipements externes sur le contrôleur du robot TS2000/TS2100
et de sortie le signal numérique du contrôleur de robot TS2000/TS2100 sur
STE 71367
– 14 –
MANUEL D'INTERFACE
l'équipement externe.
Le signal d'entrée externe est décomposé en huit (8) signaux d'entrée numériques
qui peuvent être programmés par l'utilisateur, en utilisant le langage SCOL.
Le signal de sortie externe est décomposé en huit (8) signaux de sortie
numériques qui peuvent être programmés par l'utilisateur, en utilisant le langage
SCOL.
Ces signaux, avec le signal d'entrée externe du paragraphe 1.5.1 et le signal de
sortie externe dans le paragraphe 1.5.2, permet au contrôleur du robot de travailler
avec un équipement externe.
Le connecteur "CN12" est utilisé.
1.6
Câble de signal E/S série
1.6.1
Signal E/S série "COM1"
Fig. 1.1/Fig.1.2–[12]
A partir des signaux d'entrée et de sortie série des quatre (4) voies montées sur le
contrôleur du robot TS2000/TS2100, le connecteur 9 broches D-SUB, situé sur la
première ligne à partir du haut de l'unité du connecteur avant sur la Fig. 1.1 est
COM1.
COM1 est uniquement utilisé pour le RS232C et permet la communication de
données avec un équipement de traitement d'image ou tout autre équipement qui
peut connecter une interface RS232C. Le connecteur "COM1" est utilisé.
1.6.2
Signal E/S série "HOST" (HOTE)
Fig. 1.1/Fig.1.2–[13]
A partir des signaux d'entrée et de sortie série des quatre (4) voies montées sur le
contrôleur du robot TS2000/TS2100, le connecteur 9 broches D-SUB, situé sur la
seconde ligne à partir du haut de l'unité du connecteur avant sur la Fig. 1.1 est
HOST.
HOST est uniquement utilisé pour le RS232C et permet le transfert et la
sauvegarde des divers paramètres et la mise à jour du système lorsqu'il est
connecté avec l'ordinateur hôte. Le connecteur "HOST" est utilisé.
1.6.3
TCPRGOS "TCPRG"
Fig. 1.1/Fig.1.2–[14]
Le contrôleur du robot TS2000/TS2100 utilise un outil de contrôle de séquence
STE 71367
– 15 –
MANUEL D'INTERFACE
unique "TCPRGOS" (option) pour transférer, sauvegarder et surveiller les
programmes dans l'automate programmable intégré (PLC).
Pour la connexion de l'outil de contrôle de séquence, le connecteur 9 broches
D-SUB situé sur la troisième ligne à partir du haut de l'unité de connecteur avant
sur la Fig. 1.1 est TCPRG.
Le connecteur "TCPRG" est utilisé.
Pour l'utilisation de TCPRGOS, reportez-vous au manuel de fonction de l'automate
programmable simple (option) fourni séparément.
1.6.4
Signal E/S série "POD"
Fig. 1.1/Fig.1.2–[15]
À partir des signaux d'entrée et de sortie série des quatre (4) voies montées sur le
contrôleur du robot TS2000/TS2100, le connecteur 9 broches D-SUB, situé sur la
quatrième ligne à partir du haut de l'unité de connecteur avant sur la Fig. 1.1 est
POD.
POD est uniquement utilisé pour le RS232C et permet la communication avec le
contrôleur à écran tactile où une interface RS232C peut être connectée. Le
connecteur "POD" est utilisé.
1.7
Câble du boîtier de commande suspendu d'apprentissage "TP"
Fig. 1.1/Fig.1.2–[16] (avec connecteur obturateur)
C'est une interface connectant le robot au contrôleur de robot TS2000/TS2100 et le
boîtier de commande suspendu d'apprentissage (TP1000). Le TP1000 est une
option. En connectant le câble TP, la création de programmes de mouvement, le
guidage manuel de robot, etc. sont possible via le boîtier de commande suspendu
d'apprentissage. Le connecteur "TP" est utilisé. Le connecteur "TP" est fixé sur le
boîtier de commande suspendu d'apprentissage et ne peut pas être débranché du
boîtier. La longueur standard du câble est de 5 mètres.
1.8
Câble E/S à distance "EXT–I/O"
Fig. 1.1/Fig.1.2–[9]
C'est une borne de communication RS485 connectant le module de fonction E/S à
distance en option (module TR48DIOCN/TR48DIOC, etc.) du contrôleur de robot
TS2000/TS2100. Le bloc de bornes sur l'arrière du contrôleur est utilisé pour la
connexion.
STE 71367
– 16 –
MANUEL D'INTERFACE
STE 71367
– 17 –
MANUEL D'INTERFACE
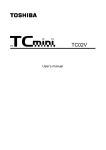
2.
Connexion du câble d'alimentation électrique
Pour connecter le câble d'alimentation électrique, utilisez le connecteur joint
(JL04V–2E18–10PE–B; fabriqué par by Japan Aviation Electronics Industry).
TS2000/TS2100
robot controller
User side
TS2000
ø 180 ~ 250 V
R
A
L1
S
B
L2
50/60 Hz
TS2100
ø 190 ~ 250 V
50/60 Hz
C
PE
Grounding (Perform exclusive
grounding with grounding
resistance of 100 Ω or less.)
D
JL04V-2E18-10PE-B
User side = Côté utilisateur
Grounding… = Mise à la terre (permet une mise à la terre indépendante avec une résistance de terre inférieure ou
égale à 100 Ω)
TS2000/TS2100 Robot controller = Contrôleur de robot TS2000/TS2100
Fig. 2.1 Connexion du câble d'alimentation électrique
TS2100
robot controller
User side
R
A
L1
S
B
L2
T
C
L3
PE
D
ø 3 180 ~ 250 V
50/60 Hz
Grounding (Perform exclusive
grounding with grounding
resistance of 100 Ω or less.)
JL04V-2E18-10PE-B
Fig. 2.2 Connexion du câble d'alimentation électrique
Pour les détails de branchement de l'alimentation électrique et du robot, reportez-vous
au manuel de transport et l'installation fourni séparément.
STE 71367
– 18 –
MANUEL D'INTERFACE
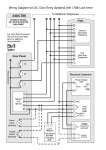
3.
Connexion du câble de commande du robot
3.1
Connexion du câble d'alimentation du moteur
Pour connecter les moteurs, utilisez les câbles fixes.
Les câbles fixes standard ne sont pas inclus dans le câblage de l'axe 5 en option.
TS2000
robot controller
Connector
(MOTOR CN2)
1
2
3
Motor
drive
cable
Connector
(MOTOR)
Robot body
J1A
U1
U
1
V1
W1
V
2
W
3
5
6
7
8
9
U2
V2
W2
U3
V3
W3
J6A
J2A
11
12
V4
W4
1
2
2
3
3
W
11
4
E
4
1
5
2
6
3
12
4
7
1
14
8
2
9
3
J7A
1
15
16
V5
W5
SM
Axis 3
SM
Axis 4
U
V
W
E
J4A
U5
Axis 2
V
J3A
4
13
SM
U
1
U4
10
Axis 1
E
4
4
SM
U
V
W
E
(Option)
U
V
2
W
SM
Axis 5
3
4
E
Case
FG
Fig. 3.1 Connexion des câbles d'alimentation de moteur
Robot body = Corps du robot
Connector … = Connecteur (MOTEUR)
Motor drive cable = Câble d'alimentation de moteur
STE 71367
– 19 –
MANUEL D'INTERFACE
Fig. 3.2 Connexion des câbles d'alimentation de moteur
Pour les détails de branchement de câbles de commande de moteur, reportez-vous
au manuel de transport et l'installation.
STE 71367
– 20 –
MANUEL D'INTERFACE
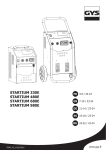
3.2
Connexion du câble d'encodeur
3.2.1
Connexion du câble d'encodeur
Pour connecter les encodeurs à la carte de circuit imprimé de servo numérique
TS2000/TS2100, utilisez les câbles joints.
CN3
TS2000/TS2100 robot controller
X8HS(1)
ENCA
X8HW(1)
ENC
X8HS(1)
ENCB
X8HW(2)
ENC
X8HS(2)
ENCA
X8HS(2)
ENCB
Encoder
cable
Robot
1
1
1
2
14
2
3
2
3
4
15
4
5
3
6
16
1
4
2
6
5
7
4
18
8
5
6
6
19
1
7
1
2
20
2
3
8
3
4
21
4
5
9
6
22
9
23
3
11
7
4
24
8
25
8
Axis 1
encoder
9
2RQ/SD
2RQ/SD*
P5V
LG
FG
3RQ/SD
3RQ/SD*
P5V
LG
1
3
8
Axis 2
encoder
9
15
J3B
1
3
8
Axis 3
encoder
9
J4B
6
6
LG
3
15
5
12
P5V
J7B
10
5
1
1RQ/SD*
J2B
5
3
2
J1B
15
17
1
J6B
1RQ/SD
9
4RQ/SD
4RQ/SD*
P5V
LG
FG
1
3
8
Axis 4
encoder
9
15
13
Case
FG
Fig. 3.2 Connexion des câbles d'encodeur
Encoder cable = Câble d'encodeur
Axis ? encoder = Encodeur de l'axe ?
STE 71367
– 21 –
MANUEL D'INTERFACE
Pour les détails de branchement de câble d'encodeur, reportez-vous au manuel de
transport et l'installation.
3.2.2
Connexion du câble d'encodeur (option)
Lors de l'utilisation de l'axe 5 (option de TS2000/TS2100), la connexion de
l'encodeur sera faite avec le câble joint.
CN11
Encoder cable
TS2000/TS2100 robot controller
X8HS(3)
ENCA
Robot
1
1
1
2
9
2
2
3
4
10
5
3
6
11
3
4
J8B
5RQ/SD
J5B
1
5RQ/SD*
P5V
3
Axis 5
encoder
8
LG
9
15
4
5
12
6
5
7
13
8
6
9
FG
14
7
15
8
Case
FG
Fig. 3.3 Connexion de câble d'encodeur
Pour les détails de branchement de câble d'encodeur, reportez-vous au manuel de
transport et l'installation.
STE 71367
– 22 –
MANUEL D'INTERFACE
3.3
Connexion du câble de signal de commande du robot
Le câble joint est utilisé pour la connexion du câble de signal de commande du robot.
Le commun E/S se présente sous deux (2) types ; Type N [X8HN (type collecteur de
sortie) est sélectionné pour la carte de circuit imprimé E/S et la polarité est la
même que celle du robot SR7000] et le type P [X8HI (type source de sortie) est
sélectionnée pour la carte de circuit imprimé E/S). Après avoir confirmé le type de
votre contrôleur, connectez le câble de signal de commande de robot.
[Type N] (lorsque la carte de circuit imprimé X8HN est utilisée)
TS2000/TS2100
robocontroller
(X8HN printed board)
CN4
Robot control signal cable
Robot
1
2
P24V
3
4
Source type
("+" common)
( ): Signal name of DIN
command
(201)
5
JOEP-1
JOES-1
6
JOEP-2
JOES-2
(202)
7
JOEP-3
JOES-3
(203)
8
JOEP-4
JOES-4
(204)
9
JOEP-5
JOES-5
10
J6C-1
11
JOFP-1
JOFS-1
12
JOFP-2
JOFS-2
13
JOFP-4
JOFS-4
14
JOFP-5
JOFS-5
(205)
( ): Signal name of DOUT
command
Brake
J3D-1
J4D-1
(201)
(202)
(203)
(204)
15
16
P24G
17
J6C-2
J3D-2
J4D-2
Sink type
(" - "common)
18
JOFP-3
JOFS-3
19
JOFP-6
JOFS-6
FG
20
JOEP-6
JOES-6
Case
JOEP-7
JOES-7
P24V
P24V
P24V
P24G
PCR-E20FS
Robot control… = Câble de signal de contrôle de robot
Type N
Fig. 3.4 Connexion de câble de signal de contrôle (Type N)
STE 71367
– 23 –
MANUEL D'INTERFACE
[Type P] (lorsque la carte de circuit imprimé X8HI est utilisée)
CN4
TS2000/TS2100
robocontroller
(X8HI printed board)
Robot control signal cable
Robot
1
2
3
4
P24G
Sink type
(" - "common)
JOEP-1
JOES-1
6
JOEP-2
JOES-2
(202)
7
JOEP-3
JOES-3
(203)
8
JOEP-4
JOES-4
(204)
9
JOEP-5
JOES-5
J6C-1
J3D-1
J4D-1
11
JOFP-1
JOFS-1
12
JOFP-2
JOFS-2
13
JOFP-4
JOFS-4
14
JOFP-5
JOFS-5
17
J6C-2
J3D-2
J4D-2
18
JOFP-3
JOFS-3
19
JOFP-6
JOFS-6
20
JOEP-6
JOES-6
Case
JOEP-7
JOES-7
10
P24V
( ): Signal name of DIN
command
(201)
5
(205)
( ): Signal name of DOUT
command
Brake
(201)
(202)
(203)
(204)
15
16
Source type
("+" common)
FG
PCR-E20FS
P24V
P24V
P24V
P24G
Type P
Fig. 3.4 Connexion de câble de signal de contrôle (Type P)
Le signal de contrôle du robot commande la MARCHE / ARRET (ON/OFF) du frein
pour l'immobilisation de l'arbre du moteur et l'effecteur terminal tel que le
fonctionnement de la main.
Le contrôleur TS2000/TS2100 est livré avec des cinq (5) signaux d'entrée de main
et quatre (4) signaux de sortie de main pour contrôler l'effecteur terminal.
Les spécifications du signal d'entrée de main sont les mêmes que celles du signal
d'entrée numérique. Le type de sortie, la structure du circuit de sortie et la valeur
nominale électrique du signal de sortie de main diffèrent de ceux du signal de sortie
numérique comme cela est décrit ci-dessous.
STE 71367
– 24 –
MANUEL D'INTERFACE
Tous les signaux de sortie de main sont arrêtés lorsque le contrôleur est mis sous
tension ou hors tension. Lors de la conception de l'effecteur terminal de main, il
faudra prendre les précautions nécessaires pour assurer que la pièce ne tombe pas
en cas de coupure d'alimentation électrique.
Le signal de contrôle du robot peut être contrôlé à partir du programme de langage
de robot. Dans chaque langage de robot, le signal de contrôle de robot est spécifié
par le nom du signal affecté à chaque signal.
Pour le langage du robot, reportez-vous au manuel de langage du robot.
En outre, les signaux d'entrée et de sortie de main peuvent être contrôlés par
l'automate programmable intégré au TS2000/TS2100. Pour de plus amples détails,
reportez-vous au manuel de fonction de l'automate programmable simple.
Il est également possible de contrôler le dispositif à double solénoïde en associant
deux (2) signaux de sortie de main. Lorsque cela se produit, deux 92) signaux de
sortie portant deux noms de signaux consécutifs sont utilisés comme un double
solénoïde. Pour le fonctionnement automatique, programmez en utilisant le
langage du robot de manière à ce que les deux (2) signaux de sortie formant le
double solénoïde puissent être uniques. Lors que le contrôleur est hors tension /
sous tension, les deux signaux sont inactifs.
Le signal de sortie de main peut également être arrêté et mis en marche via le
boîtier de commande suspendu d'apprentissage à condition que chaque signal de
sortie de main mis en marche ou arrêté soit auparavant défini dans les paramètres
utilisateur (USER. PAR).
Pour les procédures de réglages, reportez-vous au manuel de paramètres de
l'utilisateur.
Remarque :Une fois que le double solénoïde est défini, en utilisant le paramètre
utilisateur, deux (2) signaux de sortie sont exclusivement utilisés pour le
fonctionnement du signal de sortie de main via le boîtier de commande
suspendu d'apprentissage. Pour le fonctionnement automatique,
programmez en utilisant le langage du robot de manière à ce que les deux
(2) signaux de sortie formant le double solénoïde puissent être uniques.
Même si le double solénoïde est défini à l'avance, les deux (2) signaux
appropriés sont inactifs lorsque le contrôleur est mis sous tension.
Dans les commandes OPEN1, OPEN2, CLOSE1, CLOSE2, OPENI1,
OPENI2, CLOSEI1 et CLOSEI2, chaque jeu de signal de (201, 202) et (203,
204) est sorti de manière unique.
STE 71367
– 25 –
MANUEL D'INTERFACE
Le signal de sortie de main ne peut pas être réinitialisé par l'opération
RESET SIG ou la commande RESET DOUT.
STE 71367
– 26 –
MANUEL D'INTERFACE
Les spécifications de ce signal de sortie de main sont les suivantes :
•
•
•
Type de sortie
: Sortie FET
Valeur nominale électrique :
Tension nominale CC 24 V, courant nominal 1
A (max.)
Structure de circuit de sortie
DC relay drive
User side
DC relay drive
DC relay
User side
P24V
P24V
DC relay
Counter voltage
preventing diode
Counter voltage
preventing diode
Type N
P24G
Type P
P24G
[ Source Type ("+" common) ]
[ Sink type ( " - " common) ]
Counter voltage… = Diode de contre tension
DC relay = relais CC
Sink type (-)… = Type collecteur commun (-)
Source type … = Type source (commun (+)
DC relay drive = Cde relais CC
!
CAUTION
Si une intensité dépassant la valeur nominale est alimentée, l'appareil de sortie
peut être endommagé ou la carte de circuit imprimé peut grillée. Afin d'éviter ce
problème, vérifiez la valeur nominale du courant de sortie.
Un courant total de quatre (4) signaux de sortie de main devraient être inférieur ou
égale à 1 A.
N'UTILISEZ JAMAIS la fonction entrée / sortie de main du contrôleur avec une
alimentation électrique externe afin d'éviter toute panne.
Pour de plus amples informations sur le branchement du câble de signal de contrôle
de robot, reportez-vous au manuel de transport et l'installation.
STE 71367
– 27 –
MANUEL D'INTERFACE
STE 71367
– 28 –
MANUEL D'INTERFACE
4.
4.1
Connexion de câble de signal E/S externe
Connexion de câble de signal d'entrée externe
Pour connecter le câble de signal d'entrée externe, utilisez le connecteur
[XM2D–3701 (connecteur type prise), XM2S–3711 (couvercle de connecteur)].
Le commun d'entrée se présente sous deux (2) types ; Type N [X8HN (type
collecteur de sortie) est sélectionné pour la carte de circuit imprimé E/S et la polarité
est la même que celle du robot SR7000] et le type P [X8HI (type source de sortie)
est sélectionnée pour la carte de circuit imprimé E/S). Après avoir confirmé le type
de votre contrôleur, connectez le câble de signal d'entrée externe.
STE 71367
– 29 –
MANUEL D'INTERFACE
[Type N] (lorsque la carte de circuit imprimé X8HN est utilisée)
Signal name of… = Nom du signal de la commande DIN
Digital input signals = Signaux d'entrée numérique
System Input signals + Signaux d'entrée du système
Alarm reset = Réinitialisation (RAZ) d'alarme
Strobe = Strobe
Programme reset = Réinitialisation (RAZ) de programme
Cycle reset = Réinitialisation de cycle
Ouput signal reset = Réinitialisation de signal de sortie
Start = Démarrage
Stop = Stop (arrêt)
Cycle mode = Mode de cycle
Deceleration and stop = Ralentissement et arrêt
Low speed commande = Commande vitesse lente
STE 71367
– 30 –
MANUEL D'INTERFACE
CN5
TS2000/TS2100
robot controller
(X8HN printed board)
User side
( ): Signal name of DIN command
1
20
2
P24V
21
3
22
4
23
Source type
("+" common)
5
24
6
25
7
26
8
27
9
28
10
29
11
30
12
31
13
32
14
33
15
34
16
35
17
36
18
37
19
DI_1
(1)
DI_2
(2)
DI_3
(3)
DI_4
(4)
DI_5
(5)
DI_6
(6)
DI_7
Digital input signals
(7)
DI_8
(8)
DI_9
(9)
DI_10
(10)
DI_11
(11)
DI_12
(12)
DI_13
(13)
DI_14
(14)
DI_15
(15)
DI_16
(16)
DI_17
(17)
DI_18
(18)
DI_19
(19)
DI_20
(20)
DI_21
(21)
DI_22
(22)
DI_23
DI_24/ALM_RST
STROBE/DI_33
PRG_RST/DI_34
STEP_RST/DI_35
CYC_RST/DI_36
DO_RST/DI_37
RUN/DI_38
STOP
CYCLE
BREAK
LOW _SPD
P24G
(23)
(24)
Alarm reset
(33)
Strobe
(249)
(34)
Program reset
(250)
(35)
Step reset
(251)
(36)
Cycle reset
(252)
(37)
Output signal reset
(253)
(38)
Start
(255)
Stop
(257)
Cycle mode
(258)
(254)
System
input
signals
Deceleration and stop (260)
Low-speed command (259)
P24G
P24G
Case
XM2D-3701
(Dsub-37S)
Type N
FG
Fig. 4.1 Connexion des câbles de signal d'entrée externe (Type N)
STE 71367
– 31 –
MANUEL D'INTERFACE
[Type P] (lorsque la carte de circuit imprimé X8HI est utilisée)
A total … = Un courant total inférieur ou égal à 2 A (avec C N 12)
CN5
TS2000/TS2100
robot controller
(X8HI printed board)
User side
( ): Signal name of DIN command
1
20
2
21
3
22
P24G
4
Sink type
(" - " common)
23
5
24
6
25
7
26
8
27
9
28
10
29
11
30
12
31
13
32
14
33
15
34
16
35
17
36
18
37
19
DI_1
(1)
DI_2
(2)
DI_3
(3)
DI_4
(4)
DI_5
(5)
DI_6
(6)
DI_7
Digital input signals
(7)
DI_8
(8)
DI_9
(9)
DI_10
(10)
DI_11
(11)
DI_12
(12)
DI_13
(13)
DI_14
(14)
DI_15
(15)
DI_16
(16)
DI_17
(17)
DI_18
(18)
DI_19
(19)
DI_20
(20)
DI_21
(21)
DI_22
(22)
DI_23
DI_24/ALM_RST
STROBE/DI_33
PRG_RST/DI_34
STEP_RST/DI_35
CYC_RST/DI_36
DO_RST/DI_37
RUN/DI_38
STOP
CYCLE
BREAK
LOW_SPD
P24V
(23)
(24)
Alarm reset
(254)
(33)
Strobe
(249)
(34)
Program reset
(250)
(35)
Step reset
(251)
(36)
Cycle reset
(37)
Output signal reset
(38)
Start
(255)
Stop
(257)
Cycle mode
(258)
System
input
(252)
signals
(253)
Deceleration and stop (260)
Low-speed command (259)
A total of 2 A or less
(including CN12)
P24V
P24V
Case
XM2D-3701
(Dsub-37S)
Type P
FG
Fig. 4.2 Connexion des câbles de signal d'entrée externe (Type P)
STE 71367
– 32 –
MANUEL D'INTERFACE
Comme cela est montré sur la fig. 4.1 et fig. 4.2 ci-dessus, les signaux d'entrée
numérique sont des entrées de contact à tension nulle ou des entrées à collecteur
ouvert. Mis à part les signaux d'entrée de système de STOP, CYCLE, LOW_SPD,
BREAK qui sont des entrées à contact normalement fermé, tous les autres sont des
entrées à contact normalement ouvert.
Pour la fonction le circuit à utiliser, etc. de chaque signal, reportez-vous au
paragraphe 4.4 et 4.5.
En outre, les signaux d'entrée et de sortie externe peuvent être contrôlés par
l'automate programmable intégré au TS2000/TS2100. Pour de plus amples détails,
reportez-vous au manuel de fonction de l'automate programmable simple.
4.2
Connexion de câble de signal de sortie externe
Pour connecter le câble de signal de sortie externe, utilisez le connecteur
[XM2A–3701 (connecteur type prise), XM2S–3711 (couvercle de connecteur)].
Le commun de sortie se présente sous deux (2) types ; Type N [X8HN (type
collecteur de sortie) est sélectionné pour la carte de circuit imprimé E/S et la polarité
est la même que celle du robot SR7000] et le type P [X8HI (type source de sortie)
est sélectionnée pour la carte de circuit imprimé E/S). Après avoir confirmé le type
de votre contrôleur, connectez le câble de signal d'entrée externe.
STE 71367
– 33 –
MANUEL D'INTERFACE
[Type N] (lorsque la carte de circuit imprimé X8HN est utilisée)
Servo ready = Servo prêt
Batterie alarm = Alarme de pile
Acknoledge = Accusé réception
Manuel mode ON = Mode manuel ON (MARCHE)
External mode On = Mode externe ON
System ready = Système prêt
Auto mode On = Mode automatique ON
Fault = Faute
Cycle end = Fin de cycle
Low speed mode On = Mode à vitesse lente ON
Servo ON contact.. = Sortie de contact servo ON
Note … = Remarque : les signaux de sortie de système ne peut pas servir de DOUT dans le programme
Emergency stop … = Sortie de contact d'arrêt d'urgence
External Servo On = Servo externe ON
Sevo OFF = Servo OFF (ARRET)
STE 71367
– 34 –
MANUEL D'INTERFACE
CN6
TS2000/TS2100
robot controller
(X8HN printed board)
User side
1
20
2
21
3
22
4
23
5
24
P24G
Sink type
(" - " common)
6
25
7
26
8
27
9
28
10
29
11
30
12
31
13
Servo ON
Emergency
stop ON
32
14
33
15
34
16
35
17
36
18
37
19
Case
DO_1
DO_2
DO_3
DO_4
DO_5
DO_6
DO_7
DO_8
DO_9
DO_10
DO_11
DO_12
DO_13
DO_14
DO_15/SV_RDY
DO_16/BT_ALM
ACK/DO_25
TEACH/DO_26
EXTSIG/DO_27
SYS_RDY/DO_28
AUTORUN/DO_29
ALARM/DO_30
CYC_END/DO_31
LOW_ST/DO_32
SVST_A
( ): Signal name of DOUT command
(1)
(2)
(3)
(4)
(5)
(6)
Digital output signals
(7)
(8)
(9)
(10)
(11)
(12)
(13)
(14)
Servo ready
(250)
Battery alarm
(261)
(25)
Acknowledge
(251)
(26)
(27)
Manual mode ON
(252)
External mode ON
(254)
(28)
System ready
(256)
(29)
Auto mode ON
(257)
(30)
Fault
(262)
(31)
(32)
Cycle end
(258)
Low speed mode ON
(259)
(15)
(16)
System output signals
Note:
The system output
signals cannot serve as
DOUT in the program.
Servo ON contact output
SVST_B
EMSST_A
Emergency stop contact output
EMSST_B
EX_SVON
External servo ON
SVOFF
Servo OFF
EMS2B
Note (256)
Note (261)
Emergency stop contact 2
EMS2C
System input signals
EMS1B
Emergency stop contact 1
EMS1C
P24V
A total of 2 A or less
(including CN12)
P24V
P24V
XM2A-3701
(Dsub-37P)
Note.
( ): Signal name of DIN command
FG
Type N
Fig. 4.3 Connexion des câbles de signal de sortie externe (Type N)
STE 71367
– 35 –
MANUEL D'INTERFACE
[Type P] (lorsque la carte de circuit imprimé X8HI est utilisée)
CN6
TS2000/TS2100
robot controller
(X8HI printed board)
User side
1
20
P24V
DO_3
21
DO_4
3
DO_5
DO_6
4
DO_7
23
DO_8
DO_9
5
24
6
25
7
26
8
27
9
28
10
29
11
30
12
31
Servo ON
Emergency
stop ON
13
32
14
33
P24V
15
34
16
External servo ON
Servo OFF
Source Type
(" +" common)
DO_2
2
22
Source Type
(" +" common)
DO_1
35
17
36
18
37
19
Case
DO_10
DO_11
DO_12
DO_13
DO_14
DO_15/SV_RDY
DO_16/BT_ALM
ACK/DO_25
TEACH/DO_26
EXTSIG/DO_27
SYS_RDY/DO_28
AUTORUN/DO_29
ALARM/DO_30
CYC_END/DO_31
LOW_ST/DO_32
SVST_A
( ): Signal name of DOUT command
(1)
(2)
(3)
(4)
(5)
(6)
Digital output signals
(7)
(8)
(9)
(10)
(11)
(12)
(13)
(14)
Servo ready
(250)
Battery alarm
(261)
(25)
Acknowledge
(251)
(26)
Manual mode ON
(252)
(27)
External mode ON
(254)
(28)
System ready
(256)
(29)
Auto mode ON
(257)
(30)
Fault
(262)
(31)
Cycle end
(258)
(32)
Low speed mode ON
(259)
(15)
(16)
Servo ON contact output
SVST_B
System output signals
Note:
The system output
signals cannot serve as
DOUT in the program.
EMSST_A
Emergency stop contact output
EMSST_B
EX_SVON
External servo ON Note (256)
Note (261)
Servo OFF
SVOFF
EMS2B
System input signals
Emergency stop contact 2
EMS2C
EMS1B
Emergency stop contact 1
EMS1C
P24G
P24G
Note.
( ): Signal name of DIN command
P24G
XM2A-3701
(Dsub-37P)
Type P
FG
Fig. 4.4 Connexion des câbles de signal de sortie externe (Type P)
STE 71367
– 36 –
MANUEL D'INTERFACE
Comme cela est montré sur la fig. 4.3 et fig. 4.4 ci-dessus, tous les seize (16)
signaux de sortie numérique sont des sorties de transistor. Deux (2) signaux de
sortie de système (c'est à dire, sortie de contact servo ON et sortie de contact d'arrêt
d'urgence) sont des sorites à contact à relais à tension nulle et tous les autres
signaux de sortie de système sont des sorties à transistor.
Les signaux d'entrée de système de servo ON, Servo OFF, contact 1 d'arrêt
d'urgence, et contact 2 d'arrêt d'urgence externes, (connexion à deux (2)-contacts)
sont des entrées de contact à tension nulle ou des entrées à collecteur ouvert.
(Dans le type P, les deux servo ON et Servo OFF externes sont de type source ("+"
commun), différents des autres signaux d'entrée. Connectez-les à un dispositif
d'entrée externe en faisant très attention à la polarité d'entrée.)
Pour la fonction le circuit à utiliser, etc. de chaque signal, reportez-vous au
paragraphe 4.5, 4.7 et 4.8.
En outre, les signaux de sortie externes peuvent être contrôlés par l'automate
programmable intégré au TS2000/TS2100. Pour de plus amples détails,
reportez-vous au manuel de fonction de l'automate programmable simple.
4.3
Connexion de câble de signal E/S externe
Pour connecter le câble de signal d'entrée / de sortie externe, utilisez le connecteur
[XM2A–2501 (connecteur type prise), XM2S–2511 (couvercle de connecteur)].
Ce connecteur n'est pas inclus dans les accessoires. Il peut être acheté auprès de
nos services ou devra être fourni par le client.
Le commun E/S se présente sous deux (2) types ; Type N [X8HN (type collecteur de
sortie) est sélectionné pour la carte de circuit imprimé E/S et la polarité est la
même que celle du robot SR7000] et le type P [X8HI (type source de sortie) est
sélectionnée pour la carte de circuit imprimé E/S). Après avoir confirmé le type de
votre contrôleur, connectez le câble de signal E/S externe.
STE 71367
– 37 –
MANUEL D'INTERFACE
[Type N] (lorsque la carte de circuit imprimé X8HN est utilisée)
Fig. 4.5 Connexion des câbles de signal E/S externe (Type N)
Type N
STE 71367
– 38 –
MANUEL D'INTERFACE
[Type P] (lorsque la carte de circuit imprimé X8HI est utilisée)
CN12
TS2000/TS2100
robot controller
(X8HI printed board)
User side
1
14
2
15
3
16
P24G
4
Sink type
(" - " common)
17
5
18
6
P24V
19
7
20
8
21
Source type
( " +" common)
9
22
10
23
DI_25
( ): Signal name of DIN command
(25)
DI_26
(26)
DI_27
(27)
DI_28
(28)
DI_29
(29)
DI_30
Digital
input
signals
(30)
DI_31
(31)
DI_32
(32)
P24G
( ): Signal name of DOUT command
P24G
DO_17
DO_18
DO_19
DO_20
DO_21
DO_22
DO_23
DO_24
P24V
(17)
(18)
(19)
(20)
(21)
Digital
output
signals
(22)
(23)
(24)
A total of 2 A or less
including CN6
P24V
11
24
12
25
13
Case
XM2A-2501
(Dsub-25P)
Type P
FG
Fig. 4.6 Connexion des câbles de signal de sortie externe (Type P)
STE 71367
– 39 –
MANUEL D'INTERFACE
Comme cela est montré sur la fig. 4.5 et 4.6 ci-dessus, huit (8) signaux d'entrée
numérique sont des entrées de contact à tension nulle ou des entrées à collecteur
ouvert. Les huit (8) signaux de sortie numérique sont des sorties transistor.
Pour la fonction le circuit à utiliser, etc. de chaque signal, reportez-vous au
paragraphe 4.4 et 4.8.
En outre, les signaux d'entrée et de sortie externe peuvent être contrôlés par
l'automate programmable intégré au TS2000/TS2100. Pour de plus amples détails,
reportez-vous au manuel de fonction de l'automate programmable simple.
!
CAUTION
Les connecteurs COM1, HOST, TCPRG, POD et CN12 du contrôleur de robot
TS2000/TS2100 sont fixés avec un bouchon de connecteur.
A moins que ces connecteurs ne soient utilisés, fixez le bouchon de connecteur
pour éviter toute électricité statique ou dégât.
STE 71367
– 40 –
MANUEL D'INTERFACE
4.4
Signal d'entrée numérique
Désignation
Signal d'entrée numérique
DI_1 ~ DI_32, DI_33 ~ DI_38 (signaux d'entrée de système)
Borne d'entrée de
connecteur
Les signaux DI_1 ~ DI_24 sont affectés aux broches CN5–1 ~
12 et aux broches 20 ~ 31. (Voir Fig. 4.1 et 4.2.)
DI_24 peut être utilisé comme un signal ALM_RST en
changeant le paramètre utilisateur.
DI_25 ~ DI_32 sont affectés aux broches CN12–1 ~ 4 et
broches 14 ~ 17. (Voir Fig. 4.5 et 4.6.)
Les signaux de sortie de système affectés aux broches
CN5–13 ~ 15 et aux broches 32 ~ 34 peuvent être utilisés
comme signaux DI_33 ~ DI_38 en changeant le paramètre
utilisateur.
Fonction :
Chaque état de signal de DI_1 ~ DI_38 peut être identifié par
le programme du robot (commande DIN) pour brancher le
traitement du programme. Il est également possible
d'effecteur un traitement intermittent de chaque signal (DI_1 ~
DI_38) avec les changements de l'état du signal surveillés
pendant le fonctionnement du robot.
Type d'entrée
Entrée de contact à tension nulle ou entrée à collecteur ouvert.
Exemple de circuit
(structure de circuit
d'entrée)
TS2000/TS2100
TS2000/TS2100
User side
User side
P24V
P24V
●
●
Contact or
transistor
●
Contact or
transistor
●
●
P24G
P24G
[ Sink type ( " -" common) ]
[ Source type ("+" common) ]
Logique de signal
Borne d'entrée
Jugement du signal
Ouvert
OFF (arrêt)
Court-circuit
ON (marche)
STE 71367
– 41 –
MANUEL D'INTERFACE
Spécifications du
contact à tension
nulle et du
transistor
•
Spécifications des contacts à tension nulle
Valeur nominale de contact CC 24 V, supérieure ou
égale à 10 mA
Courant de circuit : Environ 7 mA
Courant minimal
CC 24 V, 1 mA
Impédance de contact
•
Inférieure ou égale à 100 Ω
Spécifications de transistor
Tension de tenue entre collecteur et émetteur
supérieure ou égale à 30 V
Courant entre collecteur et émetteur
supérieur ou égal à 10 mA
Courant de circuit : Environ 7 mA
Courant de fuite entre collecteur et émetteur
inférieur ou égal à 100 µA
Synchronisation de Lorsque des signaux d'entrée de type à impulsion sont utilisés,
signal
la largeur d'impulsion devra être supérieure ou égale à 100
ms.
100 ms or over
DI_1~DI_38
*
Lors de l'utilisation des signaux d'entrée de système comme signaux d'entrée
numériques :
Avec "Default" (automate programmable standard) étant spécifié par le
paramètre utilisateur [U11] (mode E/S), vous pouvez choisir si INPUT23, 24, 33
~ 38 sont des signaux d'entrée de système ou des signaux d'entrée numérique.
Paramètre utilisateur [U13]
[U13] Sélection du signal d'entrée (mode E/S par défaut uniquement)
{Input 23,24,33,34,35,36,37,38} (0: System 1: User)
=11000000
Spécifiez "1" pour le bit désiré souligné ci-dessus et le signal d'entrée du
système approprié peut servir comme signal d'entrée numérique. Les bits
respectifs signifient DI_23, DI_24, STROBE, PRG_RST, STEP_RST, CYC_RST,
STE 71367
– 42 –
MANUEL D'INTERFACE
DO_RST et RUN lorsqu'ils sont vus à partir de la gauche, qui correspondent
avec les signaux numériques DI_23, 24, 33 ~ 38.
STE 71367
– 43 –
MANUEL D'INTERFACE
Par exemple, pour utiliser le signal d'entrée de système STROBE comme signal
d'entrée numérique DI_33, changez les bits ci-dessus comme indiqués
ci-dessous.
11100000
Pour utiliser les signaux d'entrée de système comme les signaux d'entrée
numériques, spécifiez de la manière suivante :
11111111
NE SPÉCIFIEZ PAS zéro (0; entrée de système) pour le bit de : INPUT23.
Après avoir changé le paramètre ci-dessus, mettez sous tension /hors tension à
nouveau. Sinon, le paramètre n'est pas opératif.
0: Signal d'entrée de système
1: Signal d'entrée numérique.
Câble de signal
d'entrée
INPUT23
INPUT24
INPUT33
INPUT34
INPUT35
INPUT36
INPUT37
INPUT38
0: Entrée de système
Réservé pour une
future extension
ALM_RST
STROBE
PRG_RST
STEP_RST
CYC_RST
DO_RST
RUN
1: Entrée numérique
DI_23
DI_24
DI_33
DI_34
DI_35
DI_36
DI_37
DI_38
STE 71367
– 44 –
MANUEL D'INTERFACE
4.5
Signal d'entrée de système
Outre les treize (13) signaux qui contrôlent STOP, CYCLE, etc., du contrôleur de
robot TS2000/TS2100 à partir d'un équipement externe, les contacts 1 et 2 d'arrêt
d'urgence sont également disponibles pour le signal d'entrée de système.
Le signal d'entrée de système est fourni avec une borne d'entrée unique pour
chaque fonction. Des signaux ci-dessus, six (6) signaux (STROBE, PRG_RST,
STEP_RST, CYC_RST, DO_RST, RUN) peuvent être utilisé comme signaux
d'entrée numérique (DI_33 ~ DI_38) en changeant le paramètre utilisateur (réglage
initial).
Pour les procédures de réglages, reportez-vous aux descriptions indiquées
ci-dessus.
Pour ALM_RST, DI_24 est affecté par le réglage initial du paramètre utilisateur. Ce
signal peut être utilisé comme ALM_RST en changeant le paramètre utilisateur.
La structure du signal d'entrée de système est pratiquement identique à celle du
signal d'entrée numérique. Reportez-vous aux descriptions du paragraphe 4.4.
(Cependant, les deux (2) signaux du contact 1 d'arrêt d'urgence et du contact 2
d'arrêt d'urgence diffèrent des spécifications données ci-dessus. Reportez-vous
aux descriptions de chaque signal).
Lors de la saisie du signal d'entrée du système, conservez l'état du signal jusqu'à ce
que le signal de sortie correspondant à chaque entrée soit sorti pour assurer chaque
entrée de signal. Les relations entre le signal d'entrée et celui de sortie sont
stipulées par le tableau de synchronisation de chaque signal. Chaque signal
d'entrée de système devient également valide ou invalide au moyen du sélecteur de
MODE (mode principal) monté sur le tableau de commande. Chaque mode ON de
signal est montré sur la table 4.1 ci-dessous.
STE 71367
– 45 –
MANUEL D'INTERFACE
Table 4.1
Liste des modes ON de signal d'entrée de système
Mode principal
Mode ON
EXTERNE
Désignation
TEACHING
(APPRENTI
SSAGE)
INTERNAL
(INTERNE)
EXT. SIGNAL
(SIGNAL
EXTERNE)
STROBE (Strobe)
O
PRG_RST (raz de programme)
O
STEP_RST (raz d'étape)
O
CYC_RST (raz de cycle)
O
DO_RST (raz de signal de sortie)
O
ALM_RST (raz d'alarme)
O
RUN (Démarrage)
O
EX_SVON (servo externe ON)
O
STOP (Stop)
O
O
EXT. HOST
(HÔTE EXT)
O
CYCLE (mode d'opération en
cycle)
O
O
LOW_SPD (commande vitesse
lente)
O
O
O
O
BREAK (Ralentissement et arrêt)
O
O
O
O
SVOFF (Servo OFF)
O
O
O
O
EMS*B ~ EMS*C (contacts 1 et 2
d'arrêt d'urgence)
O
O
O
O
O :
Désignation
STROBE (Strobe)
Borne d'entrée
CN5–13 broches
Nom unique du
signal utilisé dans
le contrôleur
249
Mode ON
Logique de signal
Jugement du signal
Borne de signal
ON
(MARCHE)
Ouvert
Court-circuit
OFF (ARRÊT)
O
O
STE 71367
– 46 –
MANUEL D'INTERFACE
Fonction :
Utilisé pour sélectionner le programme d'exécution pour le
contrôleur de robot TS2000/TS2100 à partir d'un équipement
externe.
Le numéro de programme sélectionné peut utiliser tout
numéro "n" successifs (max. huit (8) numéros) du signal
d'entrée numérique externe qui sont codés.
8
7
6
5
4
3
DI(X+n–1) ----------- DI
(X)
2
1
← Numéro de programme ((max. huit (8)
bits)
← Signal d'entrée numérique externe
*n=1~8
Reportez-vous au manuel du paramètre utilisateur pour le nom
de fichier de programme, son enregistrement sur le numéro de
programme et l'affectation des bits aux signaux d'entrée
numériques externes.
Ce signal peut uniquement être utilisé dans un mode SIGNAL
EXTERNE.
Synchronisation de
signal
DI(X) ~DI(X+n-1) (I)
STROBE
(I)
ACK
(O)
RUN
(I)
Avec le démarrage du signal STROBE, les signaux
numériques ci-dessus sont lus pour sélectionner le
programme approprié signal. Lorsque le programme a été
sélectionné, le signal ACK devient actif. Activez le signal
RUN et exécutez le programme.
Précaution
Le signal STROBE ne devra pas être entré avec le signal
PRG_RST, CYC_RST, STEP_RST ou DO_RST. Puisque le
signal ACK est utilisé en commun, seul le premier signal qui
est entré devient valide et tous les autres signaux deviennent
invalides.
Si un fichier autre que le fichier en cours est sélectionné, le
programme est réinitialisé à l'étape 1 et les valeurs des
variables sont également réinitialisées.
STE 71367
– 47 –
MANUEL D'INTERFACE
*
Nom de fichier de programme et son enregistrement sur le numéro de
programme et l'affectation des bits aux signaux d'entrée numériques externes.
Pour sélectionner un fichier d'exécution (c'est-à-dire une sélection de
programme), en utilisant des signaux d'entrée numérique ou d'entrée d'extension,
l'affectation des bits sur les signaux d'entrée du contrôleur est nécessaire.
Paramètre utilisateur [U07]
[U07] Spécifiez le signal pour EXTSELECT.
{No du signal.} (1 – )
{Longueur de bit} (1 – 8)
=14
Bits soulignés = (Nom du signal le plus significatif en commande DIN) (longueur
de bit).
"Signal name in DIN command" (nom de signal en commande DIN) signifie le
numéro de signal d'entrée affecté dans un programme pour exécuter une
séquence interne. (Le nom du signal est prédéterminé dans le programme et
ne peut pas être changé par l'utilisateur.
Pour le signal d'entrée numérique, "Signal name in DIN command" (nom de
signal en commande DIN) représente un numéro entre parenthèses sur le côté
droit du nom du signal sur les fig. 4.1 et 4.2.
Nom du signal le plus significatif en commande DIN)
Spécifiez le numéro le plus significatif des signaux d'entrée à être utilisés.
(Plage permise : 1 ~ 32, 101 ~ 164, 301 ~ 364)
{Longueur de bit}
Spécifiez le numéro des signaux à être utilisés. (Plage permise 1 ~ 8)
Réglez la valeur soulignée (par ex. = 1 4
Ceci signifie que les quatre (4) signaux d'entrée numériques externes 1 ~ 4 sont
utilisés.
STE 71367
– 48 –
MANUEL D'INTERFACE
Table de correspondance
entre la valeur réglée [U07] (exemple) et le nom de fichier de programme
Nom du signal en commande DIN)
Nom de fichier de programme
(EXTRNSEL. SYS)
"PROG1"
"PROG2"
"PROG3"
"PROG4"
"PROG5"
"PROG6"
"PROG7"
4
3
2
1
0
0
0
0
0
0
0
0
0
0
0
1
1
1
0
0
1
1
0
0
1
0
1
0
1
0
1
0
"PROG8"
"PROG9"
"PROG10"
"PROG11"
"PROG12"
"PROG13"
"PROG14"
"PROG15"
"PROG16"
0
1
1
1
1
1
1
1
1
1
0
0
0
0
1
1
1
1
1
0
0
1
1
0
0
1
1
1
0
1
0
1
0
1
0
1
Avec les bits soulignés = 12, les deux (2) signaux d'entrée numérique externe 1 et 2
sont utilisés, et le numéro de fichiers de programme sélectionné est quatre (4) de
"PROG1" ~ "PROG4".
Pour enregistrer le nom du fichier de programme au numéro de programme, utilisez
le fichier EXTRNSEL. SYS.
Copyright (C) 2004 par TOSHIBA MACHINE CO., LTD.
Tous droits réservés
Sélection externe du fichier "EXTRNSEL. SYS"
*** [ 00 - 0F ] *****
= "PROG00"
= "PROG01"
= "PROG02"
= "PROG03"
STE 71367
– 49 –
MANUEL D'INTERFACE
= "PROG04"
= "PROG05"
= "PROG06"
= "PROG07"
= "PROG08"
= "PROG09"
= "PROG0A"
= "PROG0B"
= "PROG0C"
= "PROG0D"
= "PROG0E"
= "PROG0F"
Le réglage initial est celui indiqué ci-dessus. Spécifiez le nom du fichier que vous
enregistrer avant pour le bit souligné de "PROG**".
Exemple :
= "AAA"
= "BBB"
= "CCC"
= "DDD"
Spécifiez auparavant les noms de programme ci-dessus. (Si les étapes suivantes
sont exécutées sans avoir enregistré les noms de programme, une erreur de
compilation ("Compile Error") se produit.) Spécifiez alors zéro (0) pour les bits 1 et
2 de la commande DIN , qu sont réglés par le paramètre utilisateur [U07] (en
supposant que [U07] = 1 2) et entrée du signal STROBE. Le programme "AAA" est
maintenant automatiquement choisi.
Après avoir changé le paramètre ci-dessus, sauvegardez les données, mettez sous
tension /hors tension à nouveau. Sinon, le paramètre n'est pas opératif.
pour le fichier EXTRNSEL. SYS, seule la ligne décrite comme "= File name" (nom e
fichier) est effective et les autres lignes sont utilisées pour commentaires.
STE 71367
– 50 –
MANUEL D'INTERFACE
Désignation
PRG_RST (raz de programme)
Borne d'entrée
CN5–32 broches
Nom unique du
signal utilisé dans
le contrôleur
250
Logique de signal
Jugement du signal
Borne de signal
ON
(MARCHE)
Ouvert
O
Court-circuit
Fonction :
O
Utilisé pour réinitialiser le programme en ce moment arrêté à
l'étape 1. La valeur de chaque variable est également remise à
zéro (0).
Ce signal peut uniquement être utilisé dans un mode SIGNAL
EXTERNE.
Synchronisation de
signal
Précaution
OFF (ARRÊT)
AUTORUN
(O)
PRG_RST
(I)
ACK
(O)
1.
Le signal PRG_RST ne devra pas être entré avec le
signal STROBE, CYC_RST, STEP_RST ou DO_RST.
Puisque le signal ACK est utilisé en commun, seul le
premier signal qui est entré devient valide et tous les
autres signaux deviennent invalides.
2.
Ce signal peut être utilisé lorsque AUTORUN (mode
automatique de fonctionnement) est réglé sur ON
(MARCHE).
STE 71367
– 51 –
MANUEL D'INTERFACE
Désignation
STEP_RST (raz d'étape)
Borne d'entrée
CN5–14 broches
Nom unique du
signal utilisé dans
le contrôleur
251
Logique de signal
Jugement du signal
Borne de signal
ON
(MARCHE)
Ouvert
Court-circuit
Fonction :
O
O
Utilisé pour réinitialiser le programme en ce moment arrêté à
l'étape 1. La valeur de chaque variable utilisée dans le
programme reste inchangée.
Ce signal peut uniquement être utilisé dans un mode SIGNAL
EXTERNE.
Synchronisation de
signal
Précaution
OFF (ARRÊT)
AUTORUN
(O)
STEP_RST
(I)
ACK
(O)
1.
Le signal STEP_RST ne devra pas être entré avec le
signal STROBE, PRG_RST, CYC_RST ou DO_RST.
Puisque le signal ACK est utilisé en commun, seul le
premier signal qui est entré devient valide et tous les
autres signaux deviennent invalides.
2.
Ce signal peut être utilisé lorsque AUTORUN (mode
automatique de fonctionnement) est réglé sur ON
(MARCHE).
STE 71367
– 52 –
MANUEL D'INTERFACE
Désignation
CYC_RST (raz de cycle)
Borne d'entrée
CN5–33 broches
Nom unique du
signal utilisé dans
le contrôleur
252
Logique de signal
Jugement du signal
Borne de signal
ON
(MARCHE)
Ouvert
Court-circuit
Fonction :
O
O
Utilisé pour réinitialiser le programme en ce moment arrêté à
une étape appelée "RCYCLE". La valeur de chaque variable
utilisée dans le programme reste inchangée.
Ce signal peut uniquement être utilisé dans un mode SIGNAL
EXTERNE.
Synchronisation de
signal
Précaution
OFF (ARRÊT)
AUTORUN
(O)
CYC_RST
(I)
ACK
(O)
1.
Le signal CYC_RST ne devra pas être entré avec le
signal S STROBE, PRG_RST, STEP_RST ou DO_RST.
Puisque le signal ACK est utilisé en commun, seul le
premier signal qui est entré devient valide et tous les
autres signaux deviennent invalides.
2.
Ce signal peut être utilisé lorsque AUTORUN (mode
automatique de fonctionnement) est réglé sur ON
(MARCHE).
STE 71367
– 53 –
MANUEL D'INTERFACE
Désignation
DO_RST (raz de signal de sortie)
Borne d'entrée
CN5–15 broches
Nom unique du
signal utilisé dans
le contrôleur
253
Logique de signal
Jugement du signal
Borne de signal
ON
(MARCHE)
Ouvert
Court-circuit
Fonction :
O
O
Utilisé pour réinitialiser les signaux d'entrée numériques
(DO_1 ~ DO_32) du contrôleur de robot TS2000/TS2100 à
partir d'un équipement externe.
(Les signaux E/S d'extension DO_101 (133) ~ DO_120 (152)
sont également réinitialisés.)
Une fois réinitialisées, tous les signaux de DO_1 ~ DO_32
sont désactivés. Avec DO_15, DO_16, DO_25 ~ DO_32
étant réglés comme signaux de sortie de système, cependant
ils sont activés.
Ce signal peut uniquement être utilisé dans un mode SIGNAL
EXTERNE.
Synchronisation de
signal
Précaution
OFF (ARRÊT)
AUTORUN
(O)
DO_RST
(I)
ACK
(O)
D0_1~D0_32
(O)
1.
Le signal DO_RST ne devra pas être entré avec le signal
STROBE, PRG_RST, CYC_RST ou STEP_RST.
Puisque le signal ACK est utilisé en commun, seul le
premier signal qui est entré devient valide et tous les
autres signaux deviennent invalides. Les signaux de
sortie de système et les signaux de sortie de main ne
sont pas réinitialisés.
2.
Ce signal peut être utilisé lorsque AUTORUN (mode
automatique de fonctionnement) est réglé sur ON
STE 71367
– 54 –
MANUEL D'INTERFACE
(MARCHE).
STE 71367
– 55 –
MANUEL D'INTERFACE
Désignation
ALM_RST (raz d'alarme)
Borne d'entrée
CN5–31 broches
Nom unique du
signal utilisé dans
le contrôleur
254
Logique de signal
Jugement du signal
Borne de signal
ON
(MARCHE)
Ouvert
Court-circuit
Fonction :
Synchronisation de
signal
Précaution
OFF (ARRÊT)
O
O
Utilisé pour annuler une alarme à partir d'un équipement
externe qui s'est produite pendant que le contrôleur de robot
TS2000/TS2100 était prêt à démarrer.
Ce signal peut uniquement être utilisé dans un mode SIGNAL
EXTERNE.
SYS_RDY
(O)
ALARM
(O)
ALM_RST
(O)
Si une alarme du niveau d'arrêt d'urgence qui ne permet pas le
traitement de EX_SVON, ou EMSST_A ~ EMSST_B est
sortie, la réinitialisation de l'alarme par le signal ALM_RST
n'est pas possible.
STE 71367
– 56 –
MANUEL D'INTERFACE
Désignation
RUN (Démarrage)
Borne d'entrée
CN5–34 broches
Nom unique du
signal utilisé dans
le contrôleur
255
Logique de signal
Jugement du signal
Borne de signal
ON
(MARCHE)
Ouvert
O
Court-circuit
Fonction :
Synchronisation de
signal
OFF (ARRÊT)
O
Utilisé pour démarrer un programme enregistré dans le
contrôleur de robot TS2000/TS2100 à partir d'un équipement
externe pour exécuter une opération de cycle automatique.
Ce signal peut uniquement être utilisé dans un mode SIGNAL
EXTERNE.
POWER ON
SYS_RDY
(O)
SV_RDY
(O)
Approx. 1 sec.
EX_SVON
(I)
SVST_A
~SVST_B (O)
RUN
(I)
STOP
(I)
AUTORUN
(O)
STE 71367
– 57 –
MANUEL D'INTERFACE
Précaution
Après servo ON, l'opération automatique démarre avec le
début du signal RUN.
Il faut environ une (1) seconde à partir de l'entrée de
EX_SVON pour que le robot soit en fait prêt à fonctionner.
Réglez sur ON le signal RUN uniquement après que le signal
SV_RDY soit sur ON.
Même si le signal RUN est entrée avant que le signal SV_RDY
soit sur ON, il n'est pas pris en compte et l'opération
automatique ne pourra pas démarrer.
STE 71367
– 58 –
MANUEL D'INTERFACE
Désignation
EX_SVON (Entrée externe servo ON)
Borne d'entrée
CN6–15 broches
Nom unique du
signal utilisé dans
le contrôleur
256
Logique de signal
Jugement du signal
Borne de signal
ON
(MARCHE)
OFF (ARRÊT)
Ouvert
O
Court-circuit
Fonction :
Synchronisation de
signal
Approx. = environ 1
sec.
5 sec. or = supé. ou
égal à 5 sec.
Processing.. =
Traitement de servo
OFF
O
Utilisé pour mettre les servomoteurs sous tension à partir d'un
équipement externe. Une fois qu'ils sont sous tension,
l'alimentation électrique est maintenue même après la
désactivation de ce signal.
Ce signal peut uniquement être utilisé dans un mode SIGNAL
EXTERNE.
POWER ON
SYS_RDY
(O)
SV_RDY
(O)
Approx. 1 sec.
EX_SVON
5 sec. or over
(I)
SVST_A
~SVST_B (O)
Processing of servo OFF
Servo ON
Précaution
Servo OFF
Servo ON
1.
Il faut environ une (1) seconde à partir de la mise sous
tension des servos pour que le robot soit en fait prêt à
fonctionner. De ce fait, programmez de façon à ce que
le signal RUN, etc., puisse uniquement être activé après
l'activation du signal SV_RDY.
2.
Pour éviter des dégâts internes, le servo ne peut pas être
remis sous tension pendant environ 4,5 secondes après
sa mise hors tension. Pour remettre le servo sous
tension, attendez au moins cinq (5) secondes après la
STE 71367
– 59 –
MANUEL D'INTERFACE
désactivation du signal SVST_A ~ SVST_B.
STE 71367
– 60 –
MANUEL D'INTERFACE
Désignation
STOP (Stop)
Borne d'entrée
CN5–16 broches
Nom unique du
signal utilisé dans
le contrôleur
257
Logique de signal
Jugement du signal
Borne de signal
ON
(MARCHE)
Ouvert
O
Court-circuit
Fonction :
Synchronisation de
signal
Robot motion =
Mouvement du robot
OFF (ARRÊT)
O
Utilisé pour arrêter un programme enregistré dans le
contrôleur de robot TS2000/TS2100 à partir d'un équipement
externe. Lorsque ce signal est ouvert, le programme s'arrête
après que la commande de mouvement en cours soit
terminée.
Lorsque ce signal est ouvert, le robot ne peut pas opérer.
Ce signal peut toujours être utilisé, indépendant du mode
principal sélectionné au moyen du commutateur MODE.
RUN
(I)
AUTORUN
(O)
STOP
(I)
Robot motion
1 segment
1 segment
1 segment
*1
Précaution
*1
La durée de l'arrêt d'une commande de mouvement
jusqu'au démarrage de la commande du mouvement
suivant est appelé "1 segment".
1.
Lorsque la commande RUN est exécutée après
l'annulation de STOP, le programme redémarre à partir
de l'étape à côté de l'étape interrompue.
2.
L'entrée du signal RUN est inefficace à l'entrée du signal
STOP.
3.
A moins que ce signal soit utilisé, court-circuitez la borne
d'entrée (0 V) CN5–16.
STE 71367
– 61 –
MANUEL D'INTERFACE
Désignation
CYCLE (mode d'opération en cycle)
Borne d'entrée
CN5–35 broches
Nom unique du
signal utilisé dans
le contrôleur
258
Logique de signal
Jugement du signal
Borne de signal
ON
(MARCHE)
Ouvert
OFF (ARRÊT)
O
Court-circuit
Fonction :
Synchronisation de
signal
O
Utilisé pour arrêter à partir d'un équipement externe, un
programme enregistré dans le contrôleur de robot
TS2000/TS2100 après qu'une (1) opération de cycle en cours
ait été exécuté pendant un fonctionnement automatique.
Ce signal peut uniquement être utilisé dans un mode SIGNAL
EXTERNE.
RUN
(I)
AUTORUN (O)
CYCLE
(I)
Robot motion
END
1 segment
1 segment
1 segment
*1
1 cycle
*2
Précaution
*1
La durée de l'arrêt d'une commande de mouvement
jusqu'au démarrage de la commande du mouvement
suivant est appelé "1 segment".
*2
La durée à partir du début du programme principal à la
commande END (FIN) est appelée "1 cycle".
1.
À moins que ce signal soit utilisé, court-circuitez la borne
d'entrée (0 V) CN5–35.
STE 71367
– 62 –
MANUEL D'INTERFACE
Désignation
LOW_SPD (commande vitesse lente)
Borne d'entrée
CN5–36 broches
Nom unique du
signal utilisé dans
le contrôleur
259
Logique de signal
Jugement du signal
Borne de signal
Ouvert
Court-circuit
Fonction :
Synchronisation de
signal
Précaution
ON
(MARCHE)
OFF (ARRÊT)
O
O
Utilisé pour faire passer le fonctionnement du robot sur une
vitesse lente à partir d'un équipement externe.
Le robot opère à vitesse lente (la commande de vitesse lente
est valide) pendant que le signal est ouvert.
La commande prioritaire de vitesse de fonctionnement du
robot en mode de vitesse lente peut être réglée au moyen du
paramètre (Valeur de réglage initiale : 25 %)
Lorsque ce signal est court-circuité, la valeur de réglage
précédente (valeur e réglage initiale : 100 %) est à nouveau
utilisée.
Ce signal peut toujours être utilisé, indépendant du mode
principal sélectionné au moyen du commutateur MODE.
AUTORUN
(O)
LOW_SPD
(I)
LOW_ST
(O)
1.
Si la vitesse prioritaire inférieure à la valeur de réglage de
paramètre est utilisée, même si le signal LOW_SPD est
rendu valide, la valeur prioritaire de la vitesse reste
inchangée.
2.
À moins que ce signal soit utilisé, court-circuitez la borne
d'entrée (0 V) CN5–36.
STE 71367
– 63 –
MANUEL D'INTERFACE
Désignation
BREAK (Ralentissement et arrêt)
Borne d'entrée
CN5–17 broches
Nom unique du
signal utilisé dans
le contrôleur
260
Logique de signal
Jugement du signal
Borne de signal
ON
(MARCHE)
Ouvert
O
Court-circuit
Fonction :
Synchronisation de
signal
Slowdown… =
Ralentissement et
arrête pendant la
commande de
mouvement
O
Utilisé pour arrêter le mouvement de robot à partir d'un
équipement externe.
Le robot ralentit et s'arrête en même temps que ce signal est
ouvert. Après l'arrêt, le robot entre dans un état STOP
(RETRY).
Même si ce signal est à nouveau court-circuité après l'arrêt du
mouvement du robot, le robot ne fonctionnera pas. Pour
redémarrer le robot, court-circuitez ce signal et ensuite
exécutez la commande RUN.
Si ce signal est ouvert, le robot ne peut pas démarré.
Ce signal peut toujours être utilisé, indépendant du mode
principal sélectionné au moyen du commutateur MODE.
RUN
(I)
AUTORUN
(O)
BREAK
(O)
Robot motion
1 segment
*1
Précaution
OFF (ARRÊT)
1 segment
Slowdown and stop
during motion command.
*1
La durée de l'arrêt d'une commande de mouvement
jusqu'au démarrage de la commande du mouvement
suivant est appelé "1 segment".
1.
Si le robot est en fonctionnement, le traitement de
l'exécution est interrompu, et le robot ralentit et s'arrête.
2.
À moins que ce signal soit utilisé, court-circuitez la borne
d'entrée (0 V) CN5–17.
STE 71367
– 64 –
MANUEL D'INTERFACE
Désignation
SVOFF (Servo OFF)
Borne d'entrée
CN6–34 broches
Nom unique du
signal utilisé dans
le contrôleur
261
Logique de signal
Jugement du signal
Borne de signal
Ouvert
Synchronisation de
signal
OFF
(Normal)
O
Court-circuit
Fonction :
ON
(Servo OFF)
O
Utilisé pour mettre les servomoteurs hors tension à partir d'un
équipement externe.
Avec ce signal ouvert, l'alimentation électrique aux servos est
coupée.
Ce signal peut toujours être utilisé, indépendant du mode
principal sélectionné au moyen du commutateur MODE.
EX_SVON
(I)
Approx. 1 sec.
SV_RDY
SVOFF
Précaution
(O)
(I)
1.
Avec ce signal ouvert, l'alimentation électrique aux servos
ne peut pas être branchée, dans n'importe quel mode.
2.
À moins que ce signal soit utilisé, court-circuitez entre
CN6–18 et CN6–34.
STE 71367
– 65 –
MANUEL D'INTERFACE
Désignation
EMS*B ~ EMS*C (contacts 1 et 2 d'arrêt d'urgence)
Borne d'entrée
Entre CN6–16 et CN6–35 (contact 2 d'arrêt d'urgence)
Entre CN6–17 et CN6–36 (contact 1 d'arrêt d'urgence)
Logique de signal
Jugement du signal
Borne de signal
Ouvert
Court-circuit
Fonction :
Synchronisation de
signal
ON
(Arrêt
d'urgence)
OFF
(Normal)
O
O
Utilisé pour arrêter avec un arrêt d'urgence le robot à partir
d'un équipement externe.
Avec ce signal ouvert, le traitement de l'arrêt d'urgence du
robot est exécuté.
Utilisez ce contact en connectant un appareil de sécurité tel
qu'un commutateur d'arrêt d'urgence externe, un dispositif de
sécurité de détection de type photoélectrique et un tapis de
sécurité.
Avec le contact d'arrêt d'urgence ouvert, les signaux de sortie
du système EMSST_A ~ EMSST_B sont court-circuités.
EX_SVON
(I)
EMS*B
~EMS*C
(I)
SVST_A
~SVST_B
(O)
EMSST_A
~EMSST_B (O)
STE 71367
– 66 –
MANUEL D'INTERFACE
Précaution
1.
Avec ce signal ouvert, l'alimentation électrique aux servos
ne peut pas être branchée, dans n'importe quel mode.
2.
Il est assumé que EMS*A ~ EMS*B ont deux contacts
normalement fermés interconnectés, qui doivent être
activés ou désactivés en même temps. S'il y a un délai
dans l'opération de contact, le fonction de détection de
non conformité des équipements déclenche un arrêt
d'urgence.
Il n'est, donc, pas possible de court-circuiter un côté et
utiliser l'autre côté comme un arrêt d'urgence. Lorsque
cela se produit, le système peut être uniquement restauré
en mettant hors tension, puis sous tension le contrôleur.
Pour la structure du contact du commutateur d'arrêt
d'urgence, reportez-vous aux descriptions sur la ligne de
signal d'arrêt d'urgence donnée ci-dessous.
3.
À moins que ce signal soit utilisé, court-circuitez entre
CN6–16 et CN6–35, et entre CN6–17 et CN6–36.
STE 71367
– 67 –
MANUEL D'INTERFACE
*
Ligne de signal d'arrêt d'urgence
Le schéma de principe du commutateur d'arrêt d'urgence est montré ci-dessous.
TS2000/TS2100
User side
TP unit
P5V
EMS1A
EMS1B
P5G
Emergency stop
contact 1
P5V
EMS1B
P24V
EMS1C
P5G
P24G
P5V
EMS2A
Control
panel unit
EMS2B
P5G
Emergency
stop contact 2
P5V
EMS2B
To processing of
emergency stop
P24V
EMS2C
External
input
signals
P5G P24G
External input signals = Signaux d'entrée externe
Control panel unit = Tableau de commande
To processing… = Vers traitement d'arrêt d'urgence
STE 71367
– 68 –
MANUEL D'INTERFACE
4.6
Cavalier du signal de consigne de sécurité
Des câbles du signal d'entrée du système, les signaux suivants sont utilisés pour les
consignes de sécurité.
Câbles de signal d'entrée de système
CN6–34
CN5–17
CN6–16, 35
CN6–17, 36
····· CN5–16
(STOP)
(SVOFF)
(BREAK)
(EMS2B ~ EMS2C)
(EMS1B ~ EMS1C)
Pour les connecteurs fournis avec le contrôleur de robot TS2000/TS2100, ces
signaux sont déjà connectés par cavalier. Si ces signaux sont utilisés ou changés,
il faut effecteur le câblage avec le cavalier du connecteur enlevé. Lors du
fonctionnement du robot sans utiliser les signaux d'entrée du système, vérifiez la
connexion aux connecteurs fixés sur les connecteurs CN5, CN6 sur le côté du
contrôleur.
A moins que les signaux suivants soient utilisés comme signaux de système, il faut
également connecter par cavalier.
CN5–36
(LOW_SPD)
CN5–35
(CYCLE)
Cavalier de connecteurs
CN5
16–18
(35–37)
CN6
17–18
(36–19)
!
18–34
16–35
—
17–36
CAUTION
1.
À moins que les signaux de SVOFF (arrêt de servomoteur) et contacts d'arrêt
d'urgence 1, 2 ne soient connectés par cavalier, les servos ne peuvent pas
être mis sous tension.
2.
À moins que le signal CYCLE ne soit relié par cavalier, le contrôleur se met
dans un mode d'opération par cycle.
3.
À moins que le signal LOW_SPD (Vitesse lente) ne soit relié par cavalier, le
robot fonctionne à vitesse réduite pendant l'opération automatique.
STE 71367
– 69 –
MANUEL D'INTERFACE
4.
À moins que les signaux STOP et BREAK ne soient reliés par cavalier, un
fonctionnement automatique du robot n'est pas possible.
STE 71367
– 70 –
MANUEL D'INTERFACE
4.7
Signal de sortie numérique
Désignation
Signal de sortie numérique
DO_1 ~ DO_24, DO_25 ~ DO_32 (signaux de sortie de
système)
Borne de sortie de
connecteur
Les signaux DI_1 ~ DI_16 sont affectés aux broches CN5–1 ~
8 et aux broches 20 ~ 27. Voir Fig. 4.3 et 4.4.)
DO–15 et 16 peuvent être utilisés comme SV–RDY et
BT_ALM en changeant le paramètre utilisateur.
DI_17 ~ DI_24 sont affectés aux broches CN12–6 ~ 9 et
broches 19 ~ 22. Voir Fig. 4.5 et 4.6.)
Les signaux de sortie de système affectés aux broches CN6–9
~ 12 et aux broches 28 ~ 31 peuvent être utilisés comme
signaux DI_25 ~ DI_32 en changeant le paramètre utilisateur.
Fonction :
ON/OFF des signaux DO_1 ~ DO_32 et la sortie à impulsion
peut être exécuté par le programme du robot (commande
BCDOUT et commande PULOUT).
Type de sortie
Sortie à transistor
Structure de circuit
de sortie
User side
User side
P24V
P24V
●
●
P24G
[ Sink type ("-" common) ]
Valeur nominale
électrique
Tension nominale : CC 24 V
(max.
P24G
[ Source Type ("+ " common) ]
Courant nominal : 100 mA
Précaution :
Si une intensité dépassant la valeur nominale est alimentée,
l'appareil de sortie peut être endommagé ou la carte de circuit
imprimé peut grillée. Afin d'éviter ce problème, vérifiez la
valeur nominale du courant de sortie.
STE 71367
– 71 –
MANUEL D'INTERFACE
Synchronisation de Lors de l'exécution de la sortie à impulsion par la commande
signal
PULOUT, la largeur d'impulsion devra être supérieure ou
égale à 200 ms.
200 ms
DO_1~DO_32
Exemple de circuit
User side
User side
P24V
P24V
DC relay
●
●
DC relay
●
●
●
●
Counter voltage
preventing diode
P24G
P24G
[ Sink type ("-" common) ]
*
Counter voltage
preventing diode
[ Source Type ("+" common) ]
Lors de l'utilisation des signaux de sortie de système comme signaux de sortie
numériques
Avec "Default" (automate programmable standard) étant spécifié par le
paramètre utilisateur [U11] (mode E/S), vous pouvez choisir si OUTPUT13 ~ 16,
25 ~ 32 sont des signaux de sortie de système ou des signaux de sortie
numérique.
Paramètre utilisateur [U14]
[U14] Sélection du signal de sortie (mode E/S par défaut uniquement)
{Output 13 14 15 16} (0 System 1: User)
=1111
{Output 25 26 27 28 29 30 31 32} (0: System 1:
Spécifiez "1" pour le bit désiré souligné ci-dessus et le signal de sortie du
système approprié peut servir comme signal de sortie numérique. Les bits
respectifs sur le côté du haut signifient DO_13, DO_14, BT_ALM et SV_RDY
lorsque regardés à partir de la gauche, et les bits respectifs sur le côté du bas
STE 71367
– 72 –
MANUEL D'INTERFACE
représentent ACK, TEACH, EXTSIG, SYS_RDY, ALARM, AUTORUN,
CYC_END et LOW_ST lorsque regardés à partir de la gauche. Ils
correspondent aux signaux numériques DO_13 ~ DO16, DO_25 ~ DO_32,
respectivement.
STE 71367
– 73 –
MANUEL D'INTERFACE
Par exemple, pour utiliser uniquement le signal de sortie de système ACK
comme signal de sortie numérique DO_25, changez les bits comme cela est
montré ci-dessous.
10000000
Pour utiliser les signaux de sortie de système comme les signaux de sortie
numériques, spécifiez de la manière suivante :
11111111
NE SPÉCIFIEZ PAS zéro (0; sortie de système) pour le bit de : OUTPUT13 et 14.
Après avoir changé le paramètre ci-dessus, sauvegardez les données, mettez
sous tension /hors tension à nouveau. Sinon, le paramètre n'est pas opératif.
0: Signal de sortie de système
1: Signal de sortie numérique
Câble de signal de
sortie
OUTPUT13
OUTPUT14
OUTPUT15
OUTPUT16
OUTPUT25
OUTPUT26
OUTPUT27
OUTPUT28
OUTPUT29
OUTPUT30
OUTPUT31
OUTPUT32
0: Sortie de système
Réservé pour une
future extension
Réservé pour une
future extension
SV_RDY
BT_ALM
ACK
TEACH
EXTSIG
SYS_RDY
AUTORUN
ALARM
CYC_END
LOW_ST
1: Sortie numérique
DO_13
DO_14
DO_15
DO_16
DO_25
DO_26
DO_27
DO_28
DO_29
DO_30
DO_31
DO_32
STE 71367
– 74 –
MANUEL D'INTERFACE
4.8
Signaux de sortie de système
Un total de douze (12) signaux de sortie du système sont disponibles. De ceux-ci,
dix (10) signaux sont utilisés pour sortie l'état de fonctionnement du contrôleur de
robot TS2000/TS2100 et les deux (2) restants sont sortis via le contact à relais.
Le signal de sortie du système est fourni avec une borne de sortie exclusive pour
chaque fonction et peut être utilisé comme le signal de sortie numérique en
changeant le paramètre utilisateur (réglage initial).
Pour SV_RDY et BT_ALM, DO_15 et 16 sont affectés par le réglage initial du
paramètre utilisateur. Ils peuvent être utilisés comme SV_RDY and BT_ALM en
changeant le paramètre utilisateur.
Les deux (2) signaux de sortie à relais sont SVST_A ~ SVST_B et EMSST_A ~
EMSST_B. Le premier signal (SVST_A ~ SVST_B) est un type à contact
normalement ouvert et le second signal (EMSST_A ~ EMSST_B) est un type à
contact normalement fermé. Ils sont différents en opération de contact au moment
du signal de sortie ON/OFF. Pour éviter toute erreur, prenez les précautions
suivantes :
Les spécifications de ces signaux de sortie de système sont les suivantes :
•
Type de sortie
(1) Sortie à transistor (signal de sortie de système)
(2) Sortie de relais à contact (SVST_A ~ SVST_B, EMSST_A ~ EMSST_B)
Remarque :SVST_A ~ SVST_B
EMSST_A ~ EMSST_B
:
:
Sortie à contact normalement ouvert
Sortie à contact normalement fermé
STE 71367
– 75 –
MANUEL D'INTERFACE
•
Structure de circuit de sortie
Avec le type N sélectionné (lorsque la carte de circuit imprimé X8HN est utilisée)
External… = Source d'alimentation électrique externe
(1)
Sortie à transistor
(2)
User side
Sortie à contact relais
User side
P24V
●
External
power
supply
*
P24G
[ Sink type ("-" common) ]
Type N
La figure ci-dessus donne un
exemple d'une structure de sortie à
contact normalement ouvert.
La sortie à contact servo ON est un
type à contact normalement ouvert
et la sortie du contact de l'arrêt
d'urgence est de type à contact
normalement fermé. Faites
extrêmement attention lorsque
vous utilisez
STE 71367
– 76 –
MANUEL D'INTERFACE
When Type P is selected (when X8HI printed board is used)
(1)
Sortie à transistor
P24V
User side
(2)
Sortie à contact relais
User side
●
External
power
supply
*
P24G
[ Source Type (" +" common) ]
Type P
La figure ci-dessus donne un
exemple d'une structure de sortie à
contact normalement ouvert.
La sortie à contact servo ON est un
type à contact normalement ouvert
et la sortie du contact de l'arrêt
d'urgence est de type à contact
normalement fermé. Faites
extrêmement attention lorsque
vous utilisez :
•
Spécifications de transistor :
Tension nominale : CC 24 V
Courant nominal : 100 mA max.
•
Spécifications de contact à relais
Valeur maximale : CA 125 V, 0,5 A / CC60 V, 1,0 A
!
CAUTION
Si une intensité dépassant la valeur nominale est
alimentée, l'appareil de sortie peut être endommagé ou
la carte de circuit imprimé peut grillée. Afin d'éviter ce
problème, vérifiez la valeur nominale du courant de
sortie.
STE 71367
– 77 –
MANUEL D'INTERFACE
Désignation
ACK (Accusé réception)
Borne de sortie
CN6–9 broches
Nom du signal
251
Logique de signal
Jugement du signal
Borne de sortie
Haut
Bas
Fonction :
Synchronisation de
signal
Program sel.. =
Sélection de
programme
Précaution
ON
(MARCHE)
OFF (ARRÊT)
O
O
C'est une réponse aux signaux STROBE, PRG_RST,
STEP_RST, CYC_RST et DO_RST. Lorsqu'un de ces
signaux est entré, le signal ACK est renvoyé pour informer que
le traitement approprié est terminé.
Ce signal peut toujours être utilisé, indépendant du mode
principal sélectionné au moyen du commutateur MODE.
AUTORUN
(O)
Program selection
(I)
STROBE, PRG_RST, etc.
ACK
(O)
Si deux (2) ou plus des signaux d'entrée montrés ci-dessus
sont entrés en même temps, seul le signal qui a été entré le
premier est traité et ensuite le signal ACK est sorti.
STE 71367
– 78 –
MANUEL D'INTERFACE
Désignation
TEACH (Mode manuel ON)
Borne de sortie
CN6–28 broches
Nom du signal
252
Logique de signal
Jugement du signal
Borne de sortie
Haut
ON
(MARCHE)
OFF (ARRÊT)
O
Bas
Fonction :
Synchronisation de
signal
Switch mode = Mode
de commutation
Function… = Sélection
de touche de fonction
O
Ce signal devient actif lorsque le commutateur MODE du
contrôleur de robot TS2000/TS2100 est réglé sur "TEACH" et
que le mode d'opération de test n'est pas choisi.
Pendant la sortie de ce signal, le bras du robot peut être guidé
grâce au boîtier de commande suspendu d'apprentissage.
Mode switch
EXT
Function key
selection
TEACH
TEACH
EDIT
Test operation
INT
EDIT
(O)
Précaution
STE 71367
– 79 –
MANUEL D'INTERFACE
Désignation
SV_RDY (Servo prêt)
Borne de sortie
CN6–8 broches
Nom du signal
250
Logique de signal
Jugement du signal
Borne de sortie
ON
(MARCHE)
Haut
OFF (ARRÊT)
O
Bas
Fonction :
Synchronisation de
signal
O
Ce signal indique que les servos du contrôleur de robot
TS2000/TS2100 sont sous tension avec le robot prêt pour
démarrer une opération.
Ce signal peut toujours être utilisé, indépendant du mode
principal sélectionné au moyen du commutateur MODE.
POWER ON
SYS_RDY
(O)
SV_RDY
(O)
Approx. 1 sec.
EX_SVON
5 sec. or over
(I)
SVST_A
~SVST_B (O)
RUN
(I)
AUTORUN
(O)
Processing of
servo OFF
Servo ON
Servo OFF
Servo ON
STE 71367
– 80 –
MANUEL D'INTERFACE
Précaution
1.
Programmez de façon à ce que le signal RUN puisse
uniquement être activé après l'activation du signal
SV_RDY.
2.
Pour éviter des dégâts internes, le servo ne peut pas être
remis sous tension pendant environ 4,5 secondes après
sa mise hors tension. Pour remettre le servo sous
tension, attendez au moins cinq (5) secondes après la
désactivation du signal SVST_A ~ SVST_B.
STE 71367
– 81 –
MANUEL D'INTERFACE
Désignation
EXTSIG (Mode externe ON)
Borne de sortie
CN6–10 broches
Nom du signal
254
Logique de signal
Jugement du signal
Borne de sortie
ON
(MARCHE)
Haut
OFF (ARRÊT)
O
Bas
Fonction :
Synchronisation de
signal
O
Ce signal devient actif lorsque le contrôleur de robot
TS2000/TS2100 est dans le mode EXT SIGNAL.
Mode switch
INT
EXT mode
selector switch
EXTSIG
Précaution
EXT
EXT.SIGNAL
EXT.HOST
(O)
Lorsque le mode EXT est sélectionné au moyen du
commutateur MODE et le mode EXT. SIGNAL est sélectionné
au moyen du sélecteur de mode EXT, tous les signaux
d'entrée de système deviennent opératifs.
STE 71367
– 82 –
MANUEL D'INTERFACE
Désignation
SYS_RDY (Système prêt)
Borne de sortie
CN6–29 broches
Nom du signal
256
Logique de signal
Jugement du signal
Borne de sortie
Haut
Bas
Fonction :
Synchronisation de
signal
ON
(MARCHE)
OFF (ARRÊT)
O
O
Ce signal devient actif lorsque le robot peut commencer après
que le contrôleur ait été mis sous tension.
Avec ce signal, il est possible de confirmer que le robot peut
opéré,
Ce signal peut toujours être utilisé, indépendant du mode
principal sélectionné au moyen du commutateur MODE.
POWER ON
SYS_RDY
(O)
EX_SVON
(I)
SVST_A
~SVST_B (O)
Précaution
STE 71367
– 83 –
MANUEL D'INTERFACE
Désignation
AUTORUN (Mode auto ON)
Borne de sortie
CN6–11 broches
Nom du signal
257
Logique de signal
Jugement du signal
Borne de sortie
Haut
Bas
Fonction :
Synchronisation de
signal
ON
(MARCHE)
OFF (ARRÊT)
O
O
Ce signal devient actif lorsque le robot est opéré dans le mode
d'opération automatique.
Après la validation du signal RUN, après l'activation du signal
SYS_RDY, l'opération automatique commence avec cette
sortie de signal.
Ce signal reste actif tant que le robot est opéré dans le mode
d'opération automatique.
Ce signal est actif lorsque le mode INT ou EXT (EXT.
SIGNAL, EXT. HOST) est sélectionné au moyen du
commutateur MODE du contrôleur de robot TS2000/TS2100.
SYS_RDY
(O)
RUN
(I)
STOP
(I)
AUTORUN (O)
Précaution
Ce signal ne sera pas actif, avec le mode TEACH sélectionné
au moyen du commutateur MODE du contrôleur de robot
TS2000/TS2100.
STE 71367
– 84 –
MANUEL D'INTERFACE
Désignation
CYC_END (Fin de cycle)
Borne de sortie
CN6–12 broches
Nom du signal
258
Logique de signal
Jugement du signal
Borne de sortie
Haut
Bas
Fonction :
OFF (ARRÊT)
O
O
Ce signal est actif après l'arrêt de l'opération automatique de
cycle 1 uniquement lorsque le signal CYCLE est rendu valide
dans le mode d'exécution de programme (RUN) et qu'une
opération automatique est exécutée.
Ce signal peut toujours être utilisé, indépendant du mode
principal sélectionné au moyen du commutateur MODE.
Synchronisation de
signal
AUTORUN
CYCLE
CYC_END
Précaution
ON
(MARCHE)
(O)
(I)
(O)
1.
Ce signal est actif lorsque le mode RUN prend effet.
2.
Ce signal devient également actif lorsque l'opération de
cycle a été arrêté par le signal STOP, BREAK ou
ALARM.
STE 71367
– 85 –
MANUEL D'INTERFACE
Désignation
LOW_ST (Mode de vitesse lente ON)
Borne de sortie
CN6–31 broches
Nom du signal
259
Logique de signal
Jugement du signal
Borne de sortie
Haut
Bas
Fonction :
Synchronisation de
signal
ON
(MARCHE)
OFF (ARRÊT)
O
O
Ce signal devient actif lorsque le robot est opéré dans le mode
de vitesse lente en entant le signal d'entrée de système
LOW_SPD.
Ce signal peut toujours être utilisé, indépendant du mode
principal sélectionné au moyen du commutateur MODE.
AUTORUN
(O)
LOW_SPD
(I)
LOW_ST
(O)
Précaution
STE 71367
– 86 –
MANUEL D'INTERFACE
Désignation
BT_ALM (Alarme de pile)
Borne de sortie
CN6–27 broches
Nom du signal
261
Logique de signal
Jugement du signal
Borne de sortie
Haut
Bas
Fonction :
Synchronisation de
signal
OFF (ARRÊT)
O
O
Ce signal devient actif si une alarme de pile se produit dans le
robot ou le contrôleur de robot.
L'alarme de pile détecte tous les encodeurs de l'axe 1 à l'axe 5
et le niveau de la pile dans la carte de circuit imprimé principal
(X8HC).
Ce signal peut toujours être utilisé, indépendant du mode
principal sélectionné au moyen du commutateur MODE.
Battery alarm
BT_ALM
Précaution
ON
(MARCHE)
(O)
Si l'alarme de pile se produit, remplacez immédiatement la pile
en identifiant celle dont la tension a chutée et en se rapportant
au manuel de maintenance.
STE 71367
– 87 –
MANUEL D'INTERFACE
Désignation
ALARM (Alarme)
Borne de sortie
CN6–30 broches
Nom du signal
262
Logique de signal
Jugement du signal
Borne de sortie
Haut
ON
(MARCHE)
O
Bas
Fonction :
Synchronisation de
signal
Error … = L'erreur a
été corrigée
Servo OFF.. = Servo
arrêté uniquement
lorsqu'une erreur de
niveau 8 se produit
OFF (ARRÊT)
O
Ce signal devient actif si une erreur de niveau 2, 4 ou 8 s'est
produite dans le robot ou le contrôleur de robot.
Ce signal est gardé actif (sur ON) pendant la détection de
l'erreur et arrêté après que l'erreur ait été effacée.
Pour e plus amples détails sur les erreurs, reportez-vous au
manuel de l'opérateur.
Ce signal peut toujours être utilisé, indépendant du mode
principal sélectionné au moyen du commutateur MODE.
AUTORUN
ALARM
(O)
← Error has been cleared.
(O)
SVST_A
(O)
~SVST_B
Servo OFF only when an error of level 8 occurred.
Précaution
STE 71367
– 88 –
MANUEL D'INTERFACE
Désignation
SVST_A ~ SVST_B (Sortie de contact servo ON)
Borne de sortie
Entre CN6–13 broches et CN6–32 broches (sortie de contact)
Logique de signal
Jugement du signal
Ouvert
Court-circuit
Borne de sortie
OFF (ARRÊT)
ON (MARCHE)
Fonction :
Synchronisation de
signal
O
O
Une fois les servos sont sous tension, les bornes de sortie
sont court-circuitées.
Ce signal peut toujours être utilisé, indépendant du mode
principal sélectionné au moyen du commutateur MODE.
EXT_SVON
(I)
SVOFF
(I)
SVST_A
~SVST_B (O)
Précaution
Le signal est un type de sortie à contact à tension nulle. La
logique est une sortie de contact normalement ouvert. La
capacité de contact est CA 125 V (max.), 0,5 A (max.) / CC 60
V (max.), 1 A (max.).
Il faut environ une (1) seconde à partir de la mise sous tension
des servos pour que le robot soit en fait prêt à fonctionner.
STE 71367
– 89 –
MANUEL D'INTERFACE
Désignation
EMSST_A ~ EMSST_B (Sortie de contact d'arrêt d'urgence)
Borne de sortie
Entre CN6–14 broches et CN6–33 broches (sortie de contact)
Logique de signal
Jugement du signal
Ouvert
Court-circuit
Borne de sortie
OFF (ARRÊT)
ON (MARCHE)
Fonction :
O
O
Lorsque le bouton poussoir d'arrêt d'urgence sur le tableau de
commande ou le boîtier de commande suspendu
d'apprentissage est activé, ou si les signaux d'entré de signal
"Emergency stop contacts 1 & 2" sont activés, ou si
l'équipement est anormal (*), les bornes de sortie de ce signal
sont ouvertes.
Ce signal peut toujours être utilisé, indépendant du mode
principal sélectionné au moyen du commutateur MODE.
Synchronisation de
signal
SVST_A ~ SVST_B
Arrêt d'urgence logiciel
ou contacts 1 et 2
d'arrêt d'urgence
matériel en défaut
Emergency stop SW or
(I)
emergency stop contacts 1 & 2
Hardware abnormal
(O)
EMSST_A~EMSST_B (O)
Précaution
Le signal est un type de sortie à contact à tension nulle. La
logique est une sortie de contact normalement fermé. La
capacité de contact est CA 125 V (max.), 0,5 A (max.) / CC 60
V (max.), 1 A (max.).
(*) Anormalité de l'équipement
・Erreur ampli. servo (X8HS,X8HW)
・Erreur IPM
・Surtension PW
・Faible tension de l'alimentation servo
・Surchauffe
・Erreur de régulateur CC 24
・Fusible E/S grillé
・Erreur de timeout de bus
・Coupure de l'alimentation électrique instantanée
STE 71367
– 90 –
MANUEL D'INTERFACE
・Alarme CA
STE 71367
– 91 –
MANUEL D'INTERFACE
4.9
Fabrication du câble de signal E/S externe
Lors de la fabrication du câble de signal E/S externe, observez les précautions
suivantes :
a)
Les connecteurs CN5 et CN6 pour el contrôleur de robot TS2000/TS2100
doivent être des connecteurs fixés sur le contrôleur ou tout autre type de
connecteur équivalent.
Pour le CN12, préparez le connecteur de la façon suivante.
Tout équivalent fabriqué par d'autres (connecteurs D-SUB) peut également être
utilisé.
Nom du
connecteur
CN5
Type de connecteur
XM2D–3701 (connecteur de type prise)
Fabricant
OMRON
XM2S–3711 (couvercle de connecteur)
CN6
XM2A–3701 (connecteur de type
broche)
OMRON
XM2S–3711 (couvercle de connecteur)
CN12
XM2A–2501 (connecteur de type
broche)
OMRON
XM2S–2511 (couvercle de connecteur)
b)
Sélectionnez les câbles qui satisfont les spécifications suivantes.
•
•
•
•
Câbles à âme
: 0,18 mm2 ~ 0,32 mm2 fils torsadés
Diamètre extérieur de câble :
Max. 10,5 mm (CN5, CN6), 9 mm
(CN12)
Shield (blindage)
: Blindage de lot
Longueur de câble
: inférieure ou égale à 30 m
N'UTILISEZ JAMAIS de câbles qui ne sont pas conformes aux spécifications.
Sinon, les câbles peuvent surchauffer provoquant des courts-circuits ou la
fusion du câble. En outre, le robot peut ne pas fonctionner correctement à
cause des interférences.
c)
Les connecteurs CN5, CN6 et CN12 sont de type avec borne en coupelle
raccordant les câbles par soudure. Reportez-vous à la section 12 pour le
raccordement des câbles aux connecteurs et pur le blindage des câbles.
STE 71367
– 92 –
MANUEL D'INTERFACE
STE 71367
– 93 –
MANUEL D'INTERFACE
4.10
Fixation et retrait de câble de signal E/S externe
Avant d'exécuter le raccordement ou le retrait d'un câble de signal E/S externe sur
ou du contrôleur de robot TS2000/TS2100, vérifiez que l'alimentation électrique est
coupée en ayant le commutateur POWER situé sur l'arrière du contrôleur, sur off ou
en coupant l'alimentation électrique principale sur le tableau de commande de
l'utilisateur.
Connector on controller side = Connecteur du côté contrôleur
Connecteur on cable side = Connecteur du côté câble
D-sub connector = Connecteur D-sub
To be tightened = A être vissé
To be loosened = A être dévissé
Connector on controller side
Connector on cable side
D-sub
connector
To be
tightened
.
To be
loosened.
Fig. 4.7 Fixation et retrait de câble de signal E/S externe
Pour connecter un câble de signal E/S externe, insérez complètement le connecteur
du côté câble dans le connecteur côté contrôleur et vissez les vis de blocage sur les
deux côté du connecteur avec un tournevis, comme cela est montré sur la fig. 4.7.
Pour enlever le câble, dévissez tout d'abord les vis de blocage et tirez le connecteur.
À ce moment là, NE TIREZ PA sur le câble au lieu du connecteur. Sinon, le câble
peut être endommagé si une force excessive est utilisée.
!
CAUTION
Lors de la fixation ou du retrait du câble, maintenez le
connecteur plutôt que le câble.
STE 71367
– 94 –
MANUEL D'INTERFACE
4.11
[Exemple d'opération de contrôleur, en utilisant les signaux externes.
(1)
Séquence de fonctionnement normal
POWER
(I)
SYS_RDY
SV_RDY
(O)
(O)
Approx. 1 sec.
EX_SVON
(I)
SVOFF
(I)
SVST_A
~SVST_B
(O)
Program selection
STROBE
(I)
ACK
(O)
(I)
[2]
[2]
[1]
RUN
(I)
CYCLE
(I)
STOP
(I)
AUTORUN
(O)
CYC_END
(O)
[1]
Réglez sur ON le signal RUN uniquement après que le signal SV_RDY soit
sur ON.
[2]
Programmez un délai assez important avant que le signal de sélection dur
programme démarre entre l'entrée su signal de sélection de programme et
l'entrée du signal STROBE. (environ 200 msec)
STE 71367
– 95 –
MANUEL D'INTERFACE
(2)
Exemple de redémarrage du robot arrêté
Redémarrage après un arrêt (pour reprendre l'opération)
RUN
(I)
STOP
(I)
AUTORUN (O)
Redémarrage après un arrêt (pour démarrer un programme du début.
RUN
(I)
STOP
(I)
AUTORUN
(O)
STEP_RST
(I)
ACK
(O)
STE 71367
– 96 –
MANUEL D'INTERFACE
(3)
Exemple de redémarrage du robot après servo OFF (servos hors tension)
(arrêt d'urgence)
Redémarrage du robot après servo OFF (servos hors tension) (arrêt d'urgence)
When emergency… = Lorsque les contacts 1 et 2 d'arrêt d'urgence sont valides
EX_SVON
(I)
SVOFF
(I)
(Emergency stop)
EMSST_A
(O)
~EMSST_B
* When emergency stop contacts 1
and 2 are valid
SVST_A
(O)
~SVST_B
Program selection
STROBE
(I)
[2]
(I)
ACK
(O)
PRG_
STEP_
CYC_
RST
(I)
Approx. 1 sec.
SV_RDY
(I)
[1]
RUN
(I)
AUTORUN
(O)
[1]
[2]
Réglez sur ON le signal RUN uniquement après que le signal SV_RDY soit
sur ON.
Programmez un délai assez important avant que le signal de sélection dur
programme démarre entre l'entrée su signal de sélection de programme et
l'entrée du signal STROBE. (environ 200 msec)
Note 1 : Les signaux EMSST_A ~ EMSST_B (sortie de contact d'arrêt d'urgence)
sont activés lorsque les contacts 1 et 2 d'arrêt d'urgence deviennent
valides.
Note 2 : Sélection de programme, PRG_RST, STEP_RST et CYC_RST peuvent
ne pas être exécutées à moins que cela ne soit nécessaire.
STE 71367
– 97 –
MANUEL D'INTERFACE
Note 3 : Sélection de programme, PRG_RST, STEP_RST et CYC_RST peuvent
être exécutées à n'importe quel moment à moins que le mode de
fonctionnement automatique ne soit sélectionné.
STE 71367
– 98 –
MANUEL D'INTERFACE
(4)
Exemple de redémarrage du robot après une correction d'erreur
Pour résumer le fonctionnement automatique après l'occurrence d'une erreur
(c'est-à-dire traitement d'une opération automatique après la correction d'une
erreur)
Error has been cleared = L'erreur a été corrigée
EX_SVON
(I)
ALARM
(O)
ALM_RST
(I)
SVST_A
~SVST_B
(O)
SYS_RDY
(O)
SV_RDY
(O)
Program selection
Error has been cleared.
Approx. 1 sec.
(I)
[2]
STROBE
(I)
ACK
(O)
PRG_
STEP_
CYC_
RST
[1]
RUN
(I)
AUTORUN
(O)
[1]
[2]
(I)
Réglez sur ON le signal RUN uniquement après que le signal SV_RDY soit
sur ON.
Programmez un délai assez important avant que le signal de sélection dur
programme démarre entre l'entrée su signal de sélection de programme et
l'entrée du signal STROBE. (environ 200 msec)
Note 1 : Pour continuer le fonctionnement automatique, sélection de programme,
PRG_RST, STEP_RST et CYC_RST sont nécessaires.
Note 2 : La servopuissance ne peut pas être arrêté lorsqu'il y a un type d'erreur.
Note 3 : Sélection de programme, PRG_RST, STEP_RST et CYC_RST peuvent
être exécutées à n'importe quel moment à moins que le mode de
fonctionnement automatique ne soit sélectionné.
STE 71367
– 99 –
MANUEL D'INTERFACE
5.
5.1
Connexion du câble de signal E/S série
Connexion des câbles de signal E/S série COM1, HOST, TCPRG, POD et
COM2 (Option)
Le contrôleur du robot TS2000/TS2100 est livré avec quatre (4) voies de signaux
E/S série RS232C COM1, HOST, TCPRG et POD, avec une (1) voie de signal
COM2 en option. Pour la connexion, reportez-vous à la figure ci-dessous.
Nous recommandons d'utiliser les câbles disponibles commercialement.
La connexion du RS232C peut différer avec le dispositif de communication. Avant
l'utilisation, il faut donc confirmer les signaux du dispositif de communication et la
connexion du câbles disponibles commercialement.
Commercially… = Câbles de raccordement disponible dans le commerce pour ordinateur personnel
DOS/V
TS2000/TS2100 connector
DOS/V personal computer
Commercially
available
TS2000/TS2100
User side
cross cables for DOS/V
robot controller
personal computer
1
1
RXD
2
2
RXD
TXD
3
3
TXD
DTR
4
4
DTR
GND
5
5
GND
-
6
6
DSR
RTS
7
7
RTS
CTS
8
8
CTS
9
9
Case
Case
Dsub-9S
Dsub-9S
FG
Inch screw
Inch screw
Fig. 5.1 Connexion des signaux E/S série COM1, HOST, TCPRG, POD, COM2
(option)
STE 71367
– 100 –
MANUEL D'INTERFACE
STE 71367
– 101 –
MANUEL D'INTERFACE
5.2
Fixation et retrait des câbles de signal E/S série COM1, HOST, TCPRG, POD
et COM2 (Option)
Les procédures de fixation ou de retrait des câbles de signal E/S série COM1, HOST,
TCPRG, POD et COM2 (option) sont les mêmes que celles du Para. 4.10. Pour de
plus amples détails, reportez-vous au paragraphe 4.10.
!
CAUTION
Les connecteurs COM1, HOST, TCPRG, POD et CN12
du contrôleur de robot TS2000/TS2100 sont fixés avec
un bouchon de connecteur.
À moins que ces connecteurs ne soient utilisés, fixez le
bouchon de connecteur pour éviter toute électricité
statique ou dégât.
STE 71367
– 102 –
MANUEL D'INTERFACE
6.
Connexion du câble du boîtier de commande suspendu d'apprentissage "TP"
Connexion du câble TP
Teach pendant = Boîtier de commande suspendu d'apprentissage
To TP… = Vers le circuit de puissance de commande du TP
TS2000/TS2100
robot controller
X8HJ
TP
P24V
Connector
( TP)
1
P24G
9
EMS1A
2
EMS1B
10
RXDG
3
RXD
11
TXDG
4
TXD
12
P24V
5
ENABLE1
13
P24V
6
ENABLE2
14
EMS2A
7
EMS2B
15
TP_SVON
8
TP1000
teach pendant
TP cable
P24V
To TP control power circuit
P24G
EMS1A
Emergency
stop contact 1
EMS1B
RXDG
RXD
TXDG
TXD
ENABLE1A
ENABLE1B
Enable 1
ENABLE2A
ENABLE2B
Enable 2
EMS2A
Emergency
stop contact 2
EMS2B
TP_SVON
Servo ON
Case
FG
Fig. 6.1 Connexion des signaux E/S du boîtier de commande suspendu
d'apprentissage TP1000
Le câble "TP" est un câble de signal E/S série utilisé uniquement pour le boîtier de
commande suspendu d'apprentissage TP1000 (option). Un côté du câble "TP" est
fixé sur le boîtier de commande suspendu d'apprentissage et l'autre côté à un
connecteur D-SUB 15 broches.
A moins que le boîtier de commande suspendu d'apprentissage ne soit connecté,
insérez le connecteur obturateur sur le connecteur TP sur le panneau avant du
STE 71367
– 103 –
MANUEL D'INTERFACE
contrôleur.
Lors de la connexion du boîtier de commande suspendu d'apprentissage, enlevez
tout d'abord le connecteur obturateur. (Les procédures de fixation ou de retrait sont
les mêmes que celles du Para. 4.10. Pour de plus amples détails, reportez-vous au
paragraphe 4.10.)
STE 71367
– 104 –
MANUEL D'INTERFACE
Le connecteur obturateur peut être enlevé que l'alimentation électrique soit
branchée ou pas. (commutateur POWER sur on or OFF). Si le connecteur
obturateur est enlevé alors que les servo sont sous tension, l'alimentation aux
servos sera alors automatiquement coupée.
(lorsque le connecteur obturateur ou le boîtier de commande suspendu
d'apprentissage n'est pas connecté, les consignes de sécurité sont activées pour
éviter l'activation des servos).
Un commutateur de déconnexion TP est situé sur le côté gauche du connecteur TP
(lorsque vu à partir de l'avant du connecteur). Lorsque le connecteur obturateur ou
le boîtier de commande suspendu d'apprentissage est déconnecté en utilisant ce
commutateur, les servos restent sous tension. Il faut changer le connecteur tut en
maintenant enfoncé ce commutateur de déconnexion TP.
Cependant, si ce commutateur de déconnexion TP est maintenu enfoncé pendant
de longues périodes de temps, le dispositif de sécurité coupera l'alimentation
électrique aux servos. (C'est-à-dire la sortie du contact de l'arrêt d'urgence est
activée). La durée pour la fixation ou le retrait du connecteur devrait être inférieure
ou égale à quatre vingt dix 90 secondes.
!
!
CAUTION
CAUTION
À moins que le câble TP ou le connecteur obturateur ne
soit connecté au connecteur TP du contrôleur de robot
TS2000/TS2100, les servos ne peuvent pas être mis
sous tension.
IL NE FAUT JAMAIS garder le commutateur de
déconnexion TP enfoncé de manière intentionnelle.
Comme cela est montré sur la fig. 6.1, les signaux E/S du TP se composent de
signaux E/S pour la transmission de données entre le TP et le contrôleur, de signaux
pour l'identification de la mise sous tension des servos, l'arrêt d'urgence et l'entrée
d'activation du TP, les signaux P24V et P24G pour l'alimentation électrique au TP.
La transmission de données entre le TP et le contrôleur de robot TS2000/Ts2100 est
exécutée par un circuit à boucle de courant.
Ces signaux E/S sont uniquement utilisés pour le boîtier de commande suspendu
d'apprentissage TP1000 et ne peuvent pas être utilisés pour d'autres équipements.
Lorsque le TP est débranché, l'arrêt d'urgence est déclenché et les servos ne
STE 71367
– 105 –
MANUEL D'INTERFACE
peuvent pas être mis sous tension. Si le TP n'est pas utilisé, connectez le
connecteur cavalier (D-SUB 15 broches).
7.
Connexion du câble E/S EXT
7.1
Connexion du câble E/S EXT
Le câble E/S EXT est utilisé pour connecter le module TR48DIOCN/TR48DIOC
(option) ou le module E/S à distance spécial pour Toshiba Machine (option) servant
de poste esclave.
Pour alimenter en puissance le module TR48DIOCN/TR48DIOC à partir du
contrôleur, le câble E/S EXT est connecté à P24V (24 V) et P24G (0 V). Le courant
total permis maximal du module E/S à distance est de 1,2 A.)
Si le courant dépasse la valeur maximale de 3 A (avec les E/S externes), lorsqu;une
alimentation électrique interne est utilisée, utilisez une alimentation électrique
externe qui alimente 24 V et 0 V.
N'UTILISEZ JAMAIS une alimentation électrique externe et une alimentation
électrique interne. Sinon, la source d'alimentation électrique sera endommagée.
TS2000/TS2100
robot controller
Terminal block
(EXT I/O)
User side
TR48DIOCN/TR48DIOC (slave station 0)
P24V
1
1
24V
P24G
2
2
0V
485A(+)
3
3
A(485A +)
485B(-)
4
4
B(485B -)
5
5
FG
FG
FFKDS/V1-5.08-5P
Fig. 7.1 Connexion du câble RS485
a)
Utilisez le câble fixé sur le module TR48DIOCN/TR48DIOC ou le câble qui est
conforme aux spécifications suivantes :
STE 71367
– 106 –
MANUEL D'INTERFACE
•
•
•
•
•
Câbles à âme
Paire torsadée
Diamètre extérieur de câble
Shield (blindage)
Longueur de câble
:
:
:
:
:
0,3 mm2 ~ 0,75 mm2 fils torsadés
Exigences :
Max. 7 mm
Blindage tressé
inférieure ou égale à 10 m
STE 71367
– 107 –
MANUEL D'INTERFACE
•
•
Si une alimentation externe est utilisée sur le module E/S à distance, et
qu'un seul câble de communication RS485 est utilisé, la longueur totale du
câble doit être inférieure ou égale à 400 m.
Impédance :
: 100 Ω
Autres
: Pour la communication des données RS485
250 kbps.
Câble de paire torsadée recommandée avec blindage
TKVVBS 0.3 sq. × 2 P (fabriqué par Tachii Densen)
N'UTILISEZ JAMAIS de câbles qui ne sont pas conformes aux spécifications.
Sinon, les câbles peuvent surchauffer provoquant des courts-circuits ou la
fusion du câble. En outre, le robot peut ne pas fonctionner correctement à
cause des interférences.
b)
Lors de la connexion de deux (2) modules TR48DIOCN/TR48DIOC pour
l'extension E/S, vérifiez que la connexion est effectuée à partir du bloc de borne
de la station esclave 0, comme cela est montré sur la Fig. 7.2. (Pour
l'extension E/S, un maximum de deux (2) modules TR48DIOCN/TR48DIOC
peuvent être connectés.)
Pour de plus amples détails sur le module TR48DIOCN/TR48DIOC, reportez-vous
au manuel de fonction de l'automate programmable simple.
TS2000/TS2100 Terminal block
robot controller (EXT I/O)
User side
TR48DIOCN/TR48DIOC (slave station 0)
P24V
1
1
24V
P24G
2
2
0V
485A(+)
3
3
A(485A +)
485B(-)
4
4
B(485B -)
5
5
FG
TR48DIOCN/TR48DIOC (slave station 1)
FG
1
24V
2
0V
3
A(485A +)
4
B(485B -)
5
FG
STE 71367
– 108 –
MANUEL D'INTERFACE
Fig. 7.2 Connexion lors du relaiement de câble E/S EXT
STE 71367
– 109 –
MANUEL D'INTERFACE
+24V
Terminal block
TS2000/TS2100 (EXT I/O)
robot controller
External 24 V
power supply
0V
User side
TR48DIOCN/TR48DIOC (slave station 0)
P24V
1
1
24V
P24G
2
2
0V
485A(+)
3
3
A(485A +)
485B(-)
4
4
B(485B -)
5
5
FG
FG
TR48DIOCN/TR48DIOC (slave station 1)
1
24V
2
0V
3
A(485A +)
4
B(485B -)
5
FG
Fig. 7.3 Connexion du câble E/S EXT en utilisant une alimentation électrique externe
!
CAUTION
Le courant total permis maximal du module E/S à
distance d'une alimentation électrique interne de 24 V
du contrôleur de robot TS2000/TS2100, pouvant être
alimentée par une source externe est de 3 A.)
De ce fait, le courant total utilisé pour les modules de
main E/S et le module E/S à distance devra être
inférieur ou égale à 3 A.
Si le courant utilisé dépasse la valeur nominale,
l'alimentation électrique interne 24 V pourra être
endommagé ou le fusible grillera. Afin d'éviter ce
problème, assurez-vous d'utiliser dans les limites de
capacité.
STE 71367
– 110 –
MANUEL D'INTERFACE
7.2
Communication E/S EXT
Si le nombre d'E/S numérique est insuffisant pour le système, un maximum de deux
(2) modules TR48DIOCN/TR48DIOC [option; vingt huit (28) entrées et vingt (20)
sorties] peuvent être connectés comme unité d'extension de fonction E/S. Lorsque
le contrôleur du robot TS2000/TS2100 est affecté à un poste maître et que le
module TR48DIOCN/TR48DIOC à une station esclave module, les entrées et les
sorties peuvent être contrôlées via la communication série RS485.
Outre le module TR48DIOCN/TR48DIOC, un module E/S à distance conçu par
Toshiba Machine, qui peut servir de station esclave peut être utilisé.
TR48DIOCN/TR48DIOC
1: Réglage du numéro de station
esclave
2: Commutteur de réglage de
terminateur
Fig. 7.4 Connexion du module TR48DIOCN/TR48DIOC
STE 71367
– 111 –
MANUEL D'INTERFACE
•
Procédures de réglage de paramètre utilisateur
*
Pour affecter le numéro de station esclave du TS2000/TS2100, suivez les
étapes suivantes : Sous [U12] du fichier USER.PAR (paramètre utilisateur),
vous pouvez trouver le réglage de paramètre suivante se rapportant aux
entrées / sorties de l'extension.
Réglage E/S extension [U12]
{Use/Not Use} (0: Pas utilisé, 1: Use)
{Not Use}
{Not Use}
= 0 28 20 → Correspond à la station 0.
= 0 28 20 → Correspond à la station 1.
Si vous voulez uniquement utilisé la station 0 (c'est-à-dire, un (1) module
TR48DIOCN/TR48DIOC), par exemple changez le bit souligné correspondant à
la station 0 to "1".
= 1 28 20
= 0 28 20
Après avoir sauvegardé le fichier de paramètre, coupez l'alimentation électrique
au contrôleur et rebranchez-la. Les paramètres deviennent alors actifs.
Si vous voulez utilisé les deux stations 0 et 1 (c'est-à-dire, deux (2) modules
TR48DIOCN/TR48DIOC), spécifiez de la façon suivante et exécutez la même
opération que ci-dessus pour valider le paramètre.
= 1 28 20
= 1 28 20
•
Numéro de station et réglage de terminateur
Les commutateurs (2 broches) fournis sur le côté supérieur du module
TR48DIOCN/TR48DIOC représente module la broche 1 (haut) pour le numéro de
la station esclave et la broche 2 (bas) pour le réglage de terminateur.
STE 71367
– 112 –
MANUEL D'INTERFACE
TR48DIOC
1
ON
0
CH
OFF T.R.
Setting of slave
station 1
Setting of slave
station 0
1
ON
0
CH
OFF T.R.
POWER
RUN
ERROR
Terminator ON direction
Setting of slave station … = Réglage de la station esclave
Terminal On direction = Direction de la borne ON
STE 71367
– 113 –
MANUEL D'INTERFACE
Ex.1
Lors de l'ajout d'un (1)
TR48DIOCN/TR48DIOC
ON
0
2
OFF
1
1
ON
0
2
OFF
1
Lors de l'ajout de deux (2)
TR48DIOCN/TR48DIOC
1
0
2
ON
1
1
Ex.2
OFF
Le réglage de la station esclave est déjà décrite ci-dessus. Spécifiez la station
esclave de TR48DIOCN/TR48DIOC à être utilisé, en fonction du numéro de
station réglé dans USER. PAR.
Pour le terminateur, lorsqu;un seul (1) module TR48DIOCN/TR48DIOC est utilisé,
réglez sur ON le commutateur de réglage de terminateur monté sur le module.
Lorsque deux (2) modules TR48DIOCN/TR48DIOC sont utilisés, reportez-vous à
la fig. 7.4 par exemple. Comme le module TR48DIOCN/TR48DIOC sur
l'extrême droite (vu à partir de l'arrière du contrôleur), est la station terminale en
termes de câblage, réglez sur ON le commutateur de réglage de terminateur
monté sur ce module. Le terminateur du module gauche
TR48DIOCN/TR48DIOC devrait rester éteint (OFF).
Lors de l'utilisation du module TR48DIOCN/TR48DIOC, il faudra prendre en
compte les considérations suivantes :
[1]
Vérifiez que le numéro de station esclave réglé sur "USER.PAR" coïncide
avec le réglage de numéro de station du module TR48DIOCN/TR48DIOC.
[2]
Comme le module ou les modules TR48DIOCN/TR48DIOC sont connectés,
réglez sur ON le commutateur de réglage de terminateur monté sur ce
module TR48DIOCN/TR48DIOC situé sur l'extrême droite en terme de
câblage lorsque vu à partir du contrôleur.
Vérifiez que les éléments [1] et [2] sont exécutés, qu'il y ait une alimentation
électrique externe ou pas. Autrement, le système peut ne pas fonctionner
correctement ou des accidents peuvent se produire.
Avec le réglage ci-dessus, vérifiez que les deux voyants lumineux (LED) POWER
et RUN sur chacun des modules TR48DIOCN/TR48DIOC sont allumés.
STE 71367
– 114 –
MANUEL D'INTERFACE
7.3
Fixation et retrait de câble E/S EXT (EXT–I/O)
Pour le câble E/S EXT, utilisez le câble fixé sur le module TR48DIOCN/TR48DIOC
ou le câble qui est conforme aux spécifications suivantes :
Avant d'exécuter le raccordement ou le retrait d'un câble de signal E/S EXT
(EXT–I/O) externe sur ou du contrôleur de robot TS2000/TS2100, vérifiez que
l'alimentation électrique est coupée en ayant le commutateur POWER situé sur
l'arrière du contrôleur, sur off ou en coupant l'alimentation électrique principale sur le
tableau de commande de l'utilisateur.
Spring type … = Levier de contrôle de type à ressort
Screwdriver = Tournevis
Twisted cable = Câble torsadé : dia. de 0,14 ~ 1mm (longueur dénudée 10 mm)
Spring type control lever
Screwdriver
Twisted cable: 0.14 ~ 1 mm dia.
(Stripped length 10 mm)
Tout en maintenant le levier de contrôle avec un tournevis,
poussez le câble torsadé et ensuite enlevez le levier du levier
de contrôle.
Fig. 7.5 Fixation et retrait de câble E/S EXT (EXT–I/O)
Comme cela est montré sur la fig. 7.5 ci-dessus, lors de la connexion du câble E/S
EXT (EXT–I/O), Maintenez le levier de contrôle à ressort avec un tournevis et
poussez le câble à fond. Enlevez le tournevis. (Tirez légèrement sur le câble et
vérifiez qu;il est correctement connecté et ne peut pas sortir. NE LE TIREZ PAS
par le câble. Sinon, le câble peut être endommagé si une force excessive est
utilisée.)
STE 71367
– 115 –
MANUEL D'INTERFACE
Pour détacher le câble, maintenez le levier avec un tournevis, tirez sur le câble et
enlevez le tournevis.
STE 71367
– 116 –
MANUEL D'INTERFACE
8.
Connexion de câble de signal E/S d'extension (option)
Les modules TR48DIOCN et TR48DIOC peuvent être utilisés comme module E/S
d'extension sur le contrôleur de robot TS2000/TS2100.
Ils sont fournis respectivement avec vingt huit (28) entrées et vingt (20) sorties
Un maximum de deux (2) modules peut être utilisé.
Les spécifications de sortie (type source ou type collecteur) diffèrent entre les
modules TR48DIOCN et TR48DIOC.
Après avoir confirmé le type de votre module E/S d'extension, connectez les câbles
de signal E/S d'extension.
8.1
TR48DIOCN
Les spécifications de sortie du TR48DIOCN sont les mêmes que celles du SR7000
(c'est à dire type à collecteur)
Pour les spécifications d'entrée, un photocoupleur bidirectionnel est utilisé dans le
circuit d'entrée et il est possible de permuter entre le type source ou collecteur en
sélectionnant INCOM*.
8.1.1
Connexion de câble de signal d'entrée d'extension
Pour connecter le câble de signal d'entrée externe, utilisez le connecteur fixé sur le
module TR48DIOCN [[XM2A–3701 (connecteur type prise), XM2S–3711
(couvercle de connecteur)]. Connectez les entrées de TR48DIOCN (DI_101 ~
128 (station 0) et DI_133 ~ 160 (station 1) au connecteur INPUT sur le module.
STE 71367
– 117 –
MANUEL D'INTERFACE
INPUT
TR48DIOCN
User side
DI_101 ~ DI_108
DI_133 ~ DI_140
Station 0/Station 1
DI_101/DI_133
DI_102/DI_134
DI_103/DI_135
1
20
2
INCOM1
Note 1:
An example connection of DI_101 ~
108 /DI_133 ~ 140 as shown in the
figure above is the source type.
DI_104/DI_136
DI_105/DI_137
DI_106/DI_138
DI_107/DI_139
21
3
22
4
DI_108/DI_140
23
24
INCOM1
DI_109/DI_141
DI_110/DI_142
DI_111/DI_143
6
25
7
26
INCOM2
DI_112/DI_144
DI_113/DI_145
8
27
Note 2:
An example connection of DI_109 ~
116 /DI_141 ~ 148 as shown in the
figure above is the source type.
DI_114/DI_146
DI_115/DI_147
DI_116/DI_148
9
28
10
P24V
29
INCOM2
DI_117/DI_149
DI_118/DI_150
30
12
31
DI_119/DI_151
DI_120/DI_152
DI_121/DI_153
DI_122/DI_154
13
INCOM3
32
14
Note 3:
An example connection of DI_117 ~
128 /DI_149 ~ 160 as shown in the
figure above is the source type.
(102/134)
(103/135)
(104/136)
(105/137)
(106/138)
(107/139)
(108/140)
(109/141)
(110/142)
(111/143)
(112/144)
(113/145)
(114/146)
(115/147)
(116/148)
P24G
11
DI_117 ~ DI_128
DI_149 ~ DI_160
(101/133)
P24V
P24G
5
DI_109 ~ DI_116
DI_141 ~ DI_148
(Station 0/Station 1):
Signal name of DIN command
33
DI_123/DI_155
DI_124/DI_156
15
34
P24V
16
35
P24G
17
INCOM3
DI_125/DI_157
36
DI_126/DI_158
DI_127/DI_159
DI_128/DI_160
18
37
19
(117/149)
(118/150)
(119/151)
(120/152)
(121/153)
(122/154)
(123/155)
(124/156)
(125/157)
(126/158)
(127/159)
(128/160)
Case
FG
Note 1 = … = Remarque 1 : Un exemple de la connexion Dl-101~ 108/ DI_133 ~ 140 comme montrée
dans la figure ci-dessus est le type source
STE 71367
– 118 –
MANUEL D'INTERFACE
Les spécifications de ce signal d'entrée d'extension sont les suivantes :
•
Type de l'unité
Entrée de contact à tension nulle ou entrée à collecteur ouvert à transistor.
•
Exemple de circuit et de structure d'application d'un circuit d'entrée.
Type collecteur ("–" commun)
TR48DIOCN
P24V
Type source ("+" commun)
TR48DIOCN User side
User side
P24V
Contact or
transistor
DI_101 ~ DI_128
(DI_133 ~ DI_160)
DI_101 ~ DI_128
(DI_133~ DI_160)
INCOM1 ~ 3
INCOM1 ~ 3
P24G
Contact or
transistor
P24G
Contact or transistor = Contact ou transistor
•
Spécifications du contact à tension nulle / transistor
Spécifications des contacts à tension
nulle
Spécifications de transistor
Valeur nominale de contact
CC
Tension de tenue entre collecteur et
24 V, sup. ou égale
émetteur
à 10 mA
supérieure ou
égale à 30 V
Courant de circuit Environ 7 mA)
Courant entre collecteur et émetteur
Courant minimal
CC24 V, 1 mA
10 mA
Impédance connectée
Courant de circuit Environ 7 mA)
inf. ou égale à 100
Courant de fuite entre collecteur et
Ω
émetteur :
100 µA
STE 71367
– 119 –
MANUEL D'INTERFACE
8.1.2
Connexion de câble de signal de sortie d'extension
Pour connecter le câble de signal d'entrée d'extension, utilisez le connecteur fixé
sur le module TR48DIOCN [[XM2A–2501 (connecteur type prise), XM2S–2511
(couvercle de connecteur)]. Connectez les sorties de TR48DIOCN (DO_101 ~
120 (station 0) et DO_133 ~ 152 (station 1) au connecteur OUTPUT sur le module.
OUTPUT
TR48DIOCN
User side
(Station 0/Station 1):
Signal name of DOUT command
Station 0/Station 1
1
14
2
15
3
16
Sink type ("-" common)
DO_10 ~ DO_120
DO_133~ DO_152
4
17
5
18
6
19
7
20
8
P24G
Note 1:
All of DO_101 ~ 120, DO_133 ~
152 in the figure above are the
transistor outputs.
21
9
22
10
23
11
24
12
25
13
DO_101/DO_133
DO_102/DO_134
DO_103/DO_135
(101/133)
(102/134)
DO_104/DO_136
DO_105/DO_137
DO_106/DO_138
DO_107/DO_139
(104/136)
(105/137)
(106/138)
DO_108/DO_140
(108/140)
(103/135)
(107/139)
P24V
P24V
DO_109/DO_141
DO_110/DO_142
DO_111/DO_143
DO_112/DO_144
DO_113/DO_145
DO_114/DO_146
DO_115/DO_147
DO_116/DO_148
(109/141)
(110/142)
(111/143)
(112/144)
(113/145)
(114/146)
(115/147)
(116/148)
P24V
P24V
DO_117/DO_149
DO_118/DO_150
DO_119/DO_151
DO_120/DO_152
(117/149)
(118/150)
(119/151)
(120/152)
P24V
Case
FG
Remarque : Tous les Do_101 ~ 120, DO_133 ~ 152 de la figure ci-dessus sont
les sorties à transistor.
Les spécifications du signal de sortie d'extension sont les mêmes que celles du
signal de sortie numérique (c'est à dire de type collecteur) qui sont décrites dans le
paragraphe 4.7.
STE 71367
– 120 –
MANUEL D'INTERFACE
8.2
TR48DIOC
Les spécifications de sortie du TR48DIOC diffèrent de celle du SR7000 (c'est à dire
type source) La polarité est la même que la polarité de sortie de la carte de circuit
imprimé E/S X8HI de ce contrôleur.
Pour les spécifications d'entrée, un photocoupleur bidirectionnel est utilisé dans le
circuit d'entrée et il est possible de permuter entre le type source ou collecteur en
sélectionnant INCOM*.
8.2.1
Connexion de câble de signal d'entrée d'extension
Pour connecter le câble de signal d'entrée externe, utilisez le connecteur fixé sur le
module TR48DIOC [[XM2A–3701 (connecteur type prise), XM2S–3711 (couvercle
de connecteur)]. Connectez les entrées de TR48DIOC (DI_101 ~ 128 (station 0)
et DI_133 ~ 160 (station 1) au connecteur INPUT sur le module.
STE 71367
– 121 –
MANUEL D'INTERFACE
INPUT
TR48DIOC
User side
DI_101 ~ DI_108
DI_133 ~ DI_140
INCOM1
Note 1:
An example connection of DI_101 ~
108 /DI_133 ~ 140 as shown in the
figure above is the sink type.
Station 0/Station 1
DI_101/DI_133
DI_102/DI_134
DI_103/DI_135
1
20
2
21
DI_104/DI_136
DI_105/DI_137
DI_106/DI_138
DI_107/DI_139
3
22
4
DI_108/DI_140
23
24
INCOM1
DI_109/DI_141
DI_110/DI_142
DI_111/DI_143
6
25
7
INCOM2
Note 2:
An example connection of DI_109 ~
116 /DI_141 ~ 148 as shown in the
figure above is the sink type.
26
8
27
DI_112/DI_144
DI_113/DI_145
DI_114/DI_146
DI_115/DI_147
DI_116/DI_148
9
28
10
P24V
29
DI_117 ~ DI_128
DI_149 ~ DI_160
INCOM3
Note 3:
An example connection of DI_117 ~
128 /DI_149 ~ 160 as shown in the
figure above is the sink type.
(101/133)
(102/134)
(103/135)
(104/136)
(105/137)
(106/138)
(107/139)
(108/140)
P24V
P24G
5
DI_109 ~ DI_116
DI_141 ~ DI_148
(Station 0/Station 1):
Signal name of DIN command
(109/141)
(110/142)
(111/143)
(112/144)
(113/145)
(114/146)
(115/147)
(116/148)
P24G
11
30
12
31
13
INCOM2
DI_117/DI_149
DI_118/DI_150
DI_119/DI_151
DI_120/DI_152
DI_121/DI_153
DI_122/DI_154
32
14
33
15
DI_123/DI_155
DI_124/DI_156
34
16
35
17
P24V
(117/149)
(118/150)
(119/151)
(120/152)
(121/153)
(122/154)
(123/155)
(124/156)
P24G
INCOM3
DI_125/DI_157
36
18
DI_126/DI_158
DI_127/DI_159
DI_128/DI_160
37
19
(125/157)
(126/158)
(127/159)
(128/160)
Case
FG
Note 1 = … = Remarque 1 : Un exemple de la connexion Dl-101~ 108/ DI_133 ~ 140 comme montrée
dans la figure ci-dessus est le type collecteur
Les spécifications du signal d'entrée d'extension TR48DIOC sont les mêmes que
celles du signal d'entrée d'extension TR48DIOCN. Pour de plus amples détails,
reportez-vous au paragraphe 8.1.1.
STE 71367
– 122 –
MANUEL D'INTERFACE
STE 71367
– 123 –
MANUEL D'INTERFACE
8.2.2
Connexion de câble de signal de sortie d'extension
Pour connecter le câble de signal d'entrée d'extension, utilisez le connecteur fixé
sur le module TR48DIOC [[XM2A–2501 (connecteur type prise), XM2S–2511
(couvercle de connecteur)]. Connectez les sorties de TR48DIOC (DO_101 ~ 120
(station 0) et DO_133 ~ 152 (station 1) au connecteur OUTPUT sur le module.
OUTPUT
TR48DIOC
User side
Station 0/Station 1
1
14
2
15
3
16
4
Source type ("+" common)
P24V
17
5
18
6
19
7
DO_10 ~ DO_120
DO_133~ DO_152
Note 1:
All of DO_101 ~ 120, DO_133 ~
152 in the figure above are the
transistor outputs.
20
8
21
9
22
10
23
11
24
12
25
13
(Station 0/Station 1):
Signal name of DOUT command
DO_101/DO_133
DO_102/DO_134
DO_103/DO_135
(101/133)
(102/134)
DO_104/DO_136
DO_105/DO_137
DO_106/DO_138
DO_107/DO_139
(104/136)
(105/137)
(106/138)
DO_108/DO_140
(108/140)
(103/135)
(107/139)
P24G
P24G
DO_109/DO_141
DO_110/DO_142
DO_111/DO_143
DO_112/DO_144
DO_113/DO_145
DO_114/DO_146
DO_115/DO_147
DO_116/DO_148
(109/141)
(110/142)
(111/143)
(112/144)
(113/145)
(114/146)
(115/147)
(116/148)
P24G
P24G
DO_117/DO_149
DO_118/DO_150
DO_119/DO_151
DO_120/DO_152
P24G
(117/149)
(118/150)
(119/151)
(120/152)
Case
FG
Les spécifications du signal de sortie d'extension sont les mêmes que celles du
signal de sortie numérique (c'est à dire de type source) qui sont décrites dans le
paragraphe 4.7.
STE 71367
– 124 –
MANUEL D'INTERFACE
•
Valeur nominale électrique
Valeur nominale électrique
Tension nominale : CC24 V
Courant nominal : 100 mA
(max.
Précaution
Le courant nominal dans l'alimentation
électrique interne est de 3 A. Un courant
total des modules de sortie de main, de sortie
externe et de sortie d'extension devrait être
inférieur ou égal à 3 A.
Si une intensité dépassant la valeur nominale
est alimentée, l'appareil de sortie peut être
endommagé ou la carte de circuit imprimé
peut grillée. Afin d'éviter ce problème,
vérifiez la valeur nominale du courant de
sortie.
N'UTILISEZ JAMAIS une alimentation
électrique externe. Autrement, le système
peut ne pas fonctionner correctement.
8.3
Fabrication du câble de signal E/S d'extension
Pour la fabrication du câble de signal E/S d'extension, reportez-vous au paragraphe
4.9.
8.4
Fixation et retrait de câble de signal E/S d'extension
Pour le branchement et le retrait du câble de signal E/S d'extension, reportez-vous
au paragraphe 4.10.
STE 71367
– 125 –
MANUEL D'INTERFACE
9.
Connexion du câble du signal d'entrée grande vitesse (Option)
La carte de circuit imprimé X8HL est disponible comme un module en option
uniquement utilisé pour le contrôleur du robot TS2000/TS2100.
La carte de circuit imprimé X8HL est équipée de huit (8) entrées grande vitesse.
Bien qu'un filtre de 0,22 ms (valeur calculée) soit normalement fourni pour ces
entrées, seul un filtre de 2,2 µs (valeur calculée) est fourni sur les unités grande
vitesse. Pour éviter tout mauvais fonctionnement, entrez un signal sans cliquetis
ou interférence.
Pour les spécifications d'entrée, un photocoupleur bidirectionnel est utilisé dans le
circuit d'entrée et il est possible de permuter entre le type source ou collecteur en
sélectionnant COM.
Pour connecter le câble de signal d'entrée externe, utilisez le connecteur
[XM2D–1501 (connecteur type prise), XM2S–1511 (couvercle de connecteur)].
Type source ("+" commun)
CN15
TS2000/TS2100
Type collecteur ("–" commun)
( ): Signal name of DIN command
User side
robot controller
(X8HL printed board)
COM
Source type
( "+ " common)
1
9
2
10
3
11
4
12
5
13
6
14
7
15
8
DI_49
DI_50
DI_51
DI_52
DI_53
DI_54
DI_55
DI_56
P24V
P24V
COM
COM
P24G
P24G
(49)
(50)
(51)
(52)
(53)
(54)
(55)
(56)
CN15
TS2000/TS2100
robot controller
(X8HL printed board)
COM
Sink type
( "- " common)
Case
FG
( ): Signal name of DIN command
User side
(49)
(50)
(51)
(52)
(53)
(54)
(55)
(56)
DI_49
DI_50
DI_51
1
9
2
10
3
11
4
12
5
13
6
14
7
15
8
DI_52
DI_53
DI_54
DI_55
DI_56
P24V
P24V
COM
COM
P24G
P24G
Case
XM2D-1501 (cable connector)
XM2S-1511 (connector cover)
XM2D-1501 (cable connector)
XM2S-1511 (connector cover)
FG
Fig. 9.1 Connexion de câble de signal d'entrée grande vitesse
Les spécifications du signal d'entrée grande vitesse sont les mêmes que celles du
module TR48DIOCN/TR48DIOC. Pour de plus amples détails, reportez-vous au
paragraphe 8.1.1.
Lorsque ce signal est utilisé comme une fonction d'entrée de déclenchement de
STE 71367
– 126 –
MANUEL D'INTERFACE
démarrage synchrone du convoyeur, il peut également être utilisé comme une
fonction d'entrée grande vitesse.
STE 71367
– 127 –
MANUEL D'INTERFACE
9.1
Fabrication du câble du signal d'entrée grande vitesse
Pour la fabrication du câble de signal d'entrée grande vitesse, reportez-vous au
paragraphe 4.9.
9.2
Fixation et retrait de câble de signal d'entrée grande vitesse
Pour le branchement et le retrait du câble de signal d'entrée grande vitesse,
reportez-vous au paragraphe 4.10.
STE 71367
– 128 –
MANUEL D'INTERFACE
10. Câble de signal de commande du robot "BRAKE" (FREIN)
Ce câble est utilisé pour appliquer et relâcher le frein du moteur du robot, mis à part
le CN4.
Il est également possible d'appliquer et de relâcher le frein du moteur du robot,
indépendamment de la commande du contrôleur.
[Connecteur et contact sur le côté utilisateur externe
• Type de connecteur 1–1318120–3, fabriqué par Tyco Electronics
• Type de contact
1318107–1, fabriqué par Tyco Electronics
TS2000/TS2100
root controller
(BRAKE)
(X8HN/X8HI printed board)
Robot side
1
P24V
2
3
P24G
P24G
Sink type (" -" common)
Exemple de circuit d'application
TS2000/TS2100
robot controller
TS2000/TS2100
robot controller
Robot
9
9
10
10
(Brake)
P24V
P24V
19
19
20
P24G
20
P24G
(CN4)
P24G
(CN4)
P24G
Robot
P24V
1
P24V
(Brake)
2
1
2
3
3
(BRAKE)
P24G
Frein de moteur ON/OFF, utilisant le
P24G
(BRAKE)
Frein de moteur ON/OFF, utilisant le
STE 71367
– 129 –
MANUEL D'INTERFACE
connecteur "BRAKE"
connecteur "BRAKE"
STE 71367
– 130 –
MANUEL D'INTERFACE
11. Connexion du câble de sélection de puissance de sortie numérique
L'alimentation électrique de P24 V utilisé pour les trente deux (32) sorties
numériques est fournie à partir du bloc de bornes TB2 monté sur l'arrière du
contrôleur. Normalement, le bloc de borne TB2 1–2 broche est muni d'un cavalier,
et l'alimentation électrique de P24V dans le contrôleur est utilisé.
Lors de l'utilisation d'une alimentation électrique externe, connectez le 24 V et GND
(MASSE) respectivement à la broche 2 et la broche 3 du bloc de borne TB2.
Lors de l'utilisation d'une alimentation électrique interne dont la capacité de courant
dépasse 3 A (avec les E/S externes et les E/S de main)), utilisez une alimentation
électrique externe.
N'UTILISEZ JAMAIS une alimentation électrique externe et une alimentation
électrique interne. Sinon, la source d'alimentation électrique sera endommagée.
Pour connecter le câble du et vers le bloc de borne TB2, reportez-vous au para. 7.3.
Terminal block
TS2000/TS2100 (TB2)
robot controller
Internal power
supply P24V
External output
supply power
P24G
User side
1
2
24V
3
GND
AWG24~16
Fig. 11.1 en utilisant une alimentation électrique externe
Internal power… = Alimentation électrique interne P24V
EXternal output supply… = Alimentation électrique de sortie externe P24Gr
Les câbles désignés pour el bloc de borne TB2 sont AWG24 ~ 16.
Choisissez le meilleur câble possible en vous rapportant aux spécifications du
système de l'utilisateur (capacité de courant).
!
CAUTION
Le courant total permis maximal du module E/S à
distance d'une alimentation électrique interne de 24 V
du contrôleur de robot TS2000/TS2100, pouvant être
alimentée par une source externe est de 3 A.)
De ce fait, le courant total utilisé pour les modules de
main E/S et le module E/S à distance (EXT–I/O), le
module E/S externe devra être inférieur ou égale à 3 A.
Si le courant utilisé dépasse la valeur nominale,
l'alimentation électrique interne 24 V pourra être
STE 71367
– 131 –
MANUEL D'INTERFACE
endommagé ou le fusible grillera. Afin d'éviter ce
problème, assurez-vous d'utiliser dans les limites de
capacité.
STE 71367
– 132 –
MANUEL D'INTERFACE
12. Annexe A
12.1
Table de signal de système
Nom
STROBE
E/SI
E
Fonction
Sélectionne un fichier de programme
d'exécution de l'équipement externe
Jugement du signal
ON (MARCHE)
Courtcircuit
OFF (ARRÊT)
Ouvert
PRG_RST
E
Réinitialise le programme en ce moment ON (MARCHE)
arrêté à l'étape 1. La valeur de chaque
Courtvariable est également remise à zéro
circuit
(0).
OFF (ARRÊT)
Ouvert
STEP_RST
E
Réinitialise le programme en ce moment ON (MARCHE)
arrêté à l'étape 1. La valeur de chaque
Courtvariable reste inchangée.
circuit
OFF (ARRÊT)
Ouvert
CYC_RST
E
Réinitialise le programme en ce moment ON (MARCHE)
arrêté à une étape appelée "RCYCLE".
CourtLa valeur de chaque variable reste
circuit
inchangée.
OFF (ARRÊT)
Ouvert
DO_RST
E
Lot - Réinitialise les signaux d'entrée
numériques (DOUT1 ~ 32, DOUT101 ~
120.
ON (MARCHE)
Courtcircuit
OFF (ARRÊT)
Ouvert
ALM_RST
E
Annuler une alarme qui s'est produite
pendant que le contrôleur de robot
TS2000/TS2100 fonctionnait.
ON (MARCHE)
Courtcircuit
OFF (ARRÊT)
Ouvert
RUN
E
Démarre un programme arrêté pour
exécuter une opération de cycle
automatique.
ON (MARCHE)
Courtcircuit
OFF (ARRÊT)
Ouvert
EX_SVON
E
Mettez les servos sous tension.
ON (MARCHE)
STE 71367
– 133 –
MANUEL D'INTERFACE
Courtcircuit
OFF (ARRÊT)
Ouvert
STOP
E
Arrête un programme pendant une
opération automatique.
ON (MARCHE)
Ouvert
OFF (ARRÊT)
Courtcircuit
CYCLE
(LOW_SPD)
E
E
Arrête un programme en cours
d'exécution d'une opération après la fin
d'un (1) cycle.
ON (MARCHE)
Ouvert
Réduit la vitesse de fonctionnement du
robot en opération automatique.
ON (MARCHE)
Ouvert
OFF (ARRÊT)
Courtcircuit
OFF (ARRÊT)
Courtcircuit
BREAK
E
Ralenti et arrête l'opération en cours du
robot
ON (MARCHE)
Ouvert
OFF (ARRÊT)
Courtcircuit
SVOFF
E
Arrêtez la puissance servo
ON (MARCHE)
Ouvert
OFF (ARRÊT)
Courtcircuit
STE 71367
– 134 –
MANUEL D'INTERFACE
Nom
EMS*B
~ EMS*C
E/SI
S
Fonction
Jugement du signal
Arrêt d'urgence du robot.
ON (MARCHE)
Ouvert
OFF (ARRÊT)
Courtcircuit
ACK
S
C'est une réponse aux signaux d'entrée
STROBE, PRG_RST, STEP_RST,
CYC_RST et DO_RST.
ON (MARCHE)
Haut
OFF (ARRÊT)
Bas
TEACH
S
Pendant la sortie de ce signal, le bras du ON (MARCHE)
robot peut être guidé grâce au boîtier de
Haut
commande suspendu d'apprentissage.
OFF (ARRÊT)
Bas
SV_RDY
S
Ce signal est activé lorsque les servos
ON (MARCHE)
sont sous tension et que le robot est prêt
Haut
à fonctionner.
OFF (ARRÊT)
Bas
EXTSIG
S
Ce signal est activé lorsque le mode
EXT SIGNAL est sélectionné grâce au
commutateur MODE.
ON (MARCHE)
Haut
Signal de système prêt
ON (MARCHE)
Haut
SYS_RDY
S
OFF (ARRÊT)
Bas
OFF (ARRÊT)
Bas
AUTORUN
S
Ce signal est actif lorsque le programme ON (MARCHE)
est exécuté en automatique.
Haut
OFF (ARRÊT)
Bas
CYC_END
LOW_ST
BT_ALM
S
S
S
C'est un signal de sortie pour vérifier
que le programme a été arrêté par
l'entrée du signal CYCLE.
ON (MARCHE)
Haut
Ce signal devient actif lorsque le robot
est opéré dans le mode de vitesse lente
en entant le signal d'entrée de vitesse
lente.
ON (MARCHE)
Haut
Sortie d'erreur de niveau de tension de
ON (MARCHE)
OFF (ARRÊT)
Bas
OFF (ARRÊT)
Bas
STE 71367
– 135 –
MANUEL D'INTERFACE
pile pour l'alimentation électrique de
secours
ALARM
S
Sortie de faute contrôleur
Haut
OFF (ARRÊT)
Bas
ON (MARCHE)
Haut
OFF (ARRÊT)
Bas
SVST_A
~ SVST_B
S
Sortie de contact puissance servo ON
ON (MARCHE)
Conta
ct
normalement
fermé
OFF (ARRÊT)
Conta
ct
normalement
ouvert
Contact à tension
nulle
STE 71367
– 136 –
MANUEL D'INTERFACE
Nom
EMSST_A ~
EMSST_B
E/SI
S
Fonction
Utilisé pour détecter le bouton d'arrêt
d'urgence monté sur le panneau de
commande et le boîtier de commande
suspendu d'apprentissage et le signal
d'entrée de l'arrêt d'urgence.
Jugement du signal
ON (MARCHE)
Conta
ct
normalement
ouvert
OFF (ARRÊT)
Conta
ct
normalement
fermé
Contact à tension
nulle
E :
S :
Signal d'entrée
Signal de sortie
STE 71367
– 137 –
MANUEL D'INTERFACE
12.2
Fabrication de câble en utilisant le connecteur D-SUB
Les câbles pour les connecteurs de signal E/S externe TS2000/TS2100 CN5, CN6
et CN12 devraient être fabriqués comme cela est indiqué ci-dessous :
Housing
Soudage
Fil blindé
mm
10
Longueur dénudée
de paire de fil
torsadé :
4 mm
Collier de câble
Remarque :
Le fil blindé du câble utilisant un connecteur D-SUB est connecté à
la masse du contrôleur de robot TS2000/TS2100 via le coffret. Connectez
correctement le câble de mise à la terre au coffret en utilisant un collier de
serrage de câble.
STE 71367
– 138 –
MANUEL D'INTERFACE
12.3
Fabrication de câble en utilisant le connecteur demi-pas
Le câble pour le connecteur CN4 du contrôleur de robot TS2000/TS2100 pour le
signal de contrôle (côté contrôleur) devrait être fabriqué comme cela est indiqué
ci-dessous :
Logement
Soudage
Collier de câble
Fil blindé
mm
10
Longueur denude
de paire de fil
torsadé :
4 mm
Remarque :
Le fil blindé du câble du signal de contrôle de robot est connecté à
la masse du contrôleur de robot TS2000/TS2100 via le coffret. Connectez
correctement le câble de mise à la terre au coffret en utilisant un collier de
serrage de câble.
Il est également recommandé de fixer un couvercle de protection tel qu'un
conduit thermo-rétrécissable sur la partie soudée pour éviter tout
court-circuit.
STE 71367
– 139 –
MANUEL D'INTERFACE
APPROUVÉ PAR :
VÉRIFIÉ PAR :
PRÉPARÉ PAR :
STE 71367
– 140 –