1
SURE: Shizuoka University REpository
http://ir.lib.shizuoka.ac.jp/
Title
Author(s)
Citation
Issue Date
URL
Version
ものづくり学習における磁気ライントレース型ロボット
の教材化
大倉, 宏之; 須見, 尚文; 畑, 俊明
静岡大学教育学部研究報告. 自然科学篇. 53, p. 41-51
2003-03
http://doi.org/10.14945/00002011
publisher
Rights
This document is downloaded at: 2015-11-05T18:43:56Z
静岡大学教育学部研究報告
(自 然科学篇)第
53号 (2003.3)41∼ 51
41
ものづ くり学習 における磁気 ライン トレース型 ロボ ッ トの教材化
The Development of a Magnetic Line Trace Robot as a Teaching Material
for Making-Thrngs Learning
之・ 須 見
(平 成 14年 10月
畑
d
OKURA, Naobumi
.
狙
文
宏
尚珈
O
r
大 h
s
H
倉
俊
明
Toshiaki HATA
7日 受理)
Abstract
h this researё h, the magnetic line trace robot is designed and manufactured as
teaching materials for making― things learning in the lunior― high and/or high schooL
h this magnetic line trace robot,the foundation of control study is included,and the
students can make this robot Only with the use of lead switches.MOreover,the students
can develop this robOt into more advanced one according to the study of controle With
the use of this teaching material for making― things learning, the Originality and
creativlty of students tte cherished. ′
rhe students may experience the feeling of
achievement and satisfaction when the robot is made to run perfectly along the whOle
given magnetic linese The rnagnetic line trace robot developed in this study is considered
to be excellent teaching materials in the making一 things lettning.
1.は じめに
天然資源 に乏 しい 日本 は、従来 か ら資源 を有効 に活用 した「 ものづ くり」 によって社会・ 経 済基盤
を支 えて きた し、 これか らも独創的 な「 ものづ くり」によ る発展 が重 要視 されて い る。 しか しなが ら、
多 くの工 業製 品 の 中 で育 った子供 たちは ブ ラックボ ックス化 された機器 に囲 まれ、取扱説 明書 によ る
機器操作 に従順 させ られた 日常生 活 の もとで、 ものづ くりに触 れ合 う機会 は少 な くな って い る。 この
よ うな社会背景 の反省 の もと、ものづ くりに対 す る関心・ 興味 を育 て、 ものづ くりを通 して思
考力 。創
造性 を高 め る教育 の意義 は大 き く、学校教育 にお いて平成 14年 度か ら実施 された新 中学校学習指導 要
領解説 の技術・ 家庭科 の技術分野 は「 ものづ くり」が一 つの キ ー ヮー ドとな ってお り 。 、積極的 に も
のづ く りの機会 を増 や し進 め ていかなければな らな い。 この ものづ くり学習 に して きな
対
大
社会的責
任 が課 せ られた技術科教 育 では、今 日的 な、有効 な ものづ くり教材 の研究・ 開発が行われて い る の 。
本研究 では、 ものづ くり教材 を 開発す るにあた り、 ものづ くりの基礎 0基 本姿勢 を、既存 の知識 を
組 み合 わせて新 しい もの を構築 す る実践的・ 体験的 な活動 ととらえ、 理 解 で きる原 理 を基 に生 徒 の 中
に問題意識 を育 て、問題 解決 を 目指 す活動 が含 まれ る もの と考 えた。
そ こで、本報告 は 中学校 や工 業高校 な どにお ける ものづ くりの基礎的 学習 の教材 と して、学習者 が
発展的 に学習 で きる4種 類 の磁気 ライ ン トレー ス型 ロボ ッ トを開発 し、 この ロボ ッ トが電気・ 機械・ 制
大 倉 宏 之 0須
42
田
見 尚 文・ ナ
俊 明
御 を融合 した今 日的 ものづ くり教材 として有効 であ り、設計・ 製作活動 にお いて多 くの創意工夫 を促
す問題解決学習 が含 まれて い ることを示 した。
2。
磁気 ライ ン トレー ス型 ロボ ッ トの特徴
ライ ン トレース ロボ ッ トの代表的 な もの として、床面 に描画 した線 か らの光 の反射 を とらえて ト
レースするものなどがあ り、製作方法 も多 く報告 されて いる 0。 また、ライ ン トレースロボ ットの キ
ッ ト の も市販 され、技術科教育 の場 で も利用 されて い る。 しか しなが ら、これ らの ライ ン トレース ロ
ボ ッ トは光 セ ンサにフォ トトラ ンジス タなどの半導体 とそれに付随 した電子回路を用 いて制御 を行 う
ため、制御 の理解 には半導体回路 の知識が要求 され、中学生 では難易度 は高 く、回路設計 や製作 な ど
に創意工夫箇所 が少 な い。
一方、磁気 ライ ン トレース型 ロボ ッ トは、床面 に埋 め込 まれた磁石 の列 を トレース して走行する ロ
ボ ッ トである。 この型 の ロボ ッ トは、磁気 ライ ンのセ ンサに磁力 で接点 を ON-OFFす る リー ドスイ
ッチが使用 で きるた め、制御回路 に半導体回路 を必要 としな い特徴が ある。 このため、磁気 ライ ン ト
レース型 ロボ ッ トは制御 の仕組 みを機械的・ 視覚的で捉 えることができ、中学 生 にと って制御 の仕組
みの理解 が容易 で製作 しやす い長所 がある。 さらに、曲が りくね った複雑 な コー スで あ って も、 リー
ドスイ ッチの配置 を工夫 す ることや リレー回路 を付加 する ことで、 よ り正確 に トレースす る ことが可
能 とな るなど、設計・ 製作 に技術的創意工夫 の機会 が与 え られる。 また、工業高校 で半導体 を学ぶ生
徒 であれば、磁気 セ ンサ にホールICや ホール素子 などの半導体 を用 いた制御回路研究 を行わせ る こと
で、進行方向まで も制御す る、 よ り高度 な ものづ くり学習 へ と発展 できる。
磁気 ライ ンの製作 に関 しては、著者 の一人 である畑 らによ って児童生徒が自分 自身 の手 で、 自分 の
好 きな形 の セ ラ ミックス焼結磁石を作成す る方法 が考案 され D、 その実践 も行われてお り、磁気 ライ
ンに用 いる磁石 は生徒 自身 が製作 できる環境 にある。磁石 の製作 を取 り入 れた磁気 ライ ン トレース型
ロボ ッ トの製作 は、更 に学習内容 の豊富 な ものづ くり教材 といえる。
3.磁 気 ライ ン トレー ス型 ロボ ッ トの回路設計
ロ
制御回路 の仕組 みの説明 にあた り、 セ ンサ と車輪 の位置関係 は磁 気 ライ ン側 か ら見 た ボ ッ ト図
た
(シ ャー シ裏面 )で 示す。 また、磁気 ライ ンは、断面 を縦 101nm、 横 5-、 奥行 30-を 1片 とし
磁石を長手方向 に 1列 に並 べた もので、 ロボ ッ トの進行方向 に対 して磁気 ライ ンの左側 が N極 、右側
がS極 となるように配置す る。磁石 の列 の上面 は2mmの 塩 ビ板 で覆 い、塩 ビ板 を路面 として ロボ ッ ト
はその上を走行 させ るもの とした。
3.1
リー ドスイッチ 2個 用 いた磁気 ライ ン トレー ス型 ロボ ッ ト制御回路
リー ドスイ ッチとは、 プ ッシュスイ ッチなどの機械的 スイ ッチとは異 な り、磁石を近 づ けるとリー
ドが磁化 して接点部 が接触 する近接 スイ ッチであ る 0。 この リー ドスイ ッチを2個 用 いた磁気 ライ ン
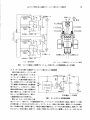
トレース型 ロボ ッ トの制御回路 を図 1(a)に 示す。
ー ス
本回路 は、手動 で モー タ電流 をON00FFす る機械的 スイ ッチを、磁石 の力 で作動 する リ ド イ ッ
チに置 き換 えた ものである。2つ の リー ドスイ ッチは図 1(b)に 示す ように シャー シ裏面 に取 り付 け
る。 リー ドスイ ッチによる制御 の仕組 みは以下 の通 りである。2つ の リー ドスイ ッチの中間付近 に磁
気 ライ ンが位置 す るときは各 リー ドスイ ッチは導通状態 とな り、左右 のモー タのスイ ッチは ONと な
り直進す る。 また、磁気 ライ ンの位置 が いずれかめ リー ドスイ ッチ側 に偏 るときは、遠 ざか った側
の
ものづ くり学習における磁気ライ ン トレース型 ロボ ットの教材化
43
リー ドスイ ッチが OFFと なる。OFFと なると片輪 のみの駆動 とな り、磁気 ライ ンに復元 しよ うと旋回
する。 しか し、何 らか の理 由で2つ の リー ドスイ ッチが磁気 ライ ンか ら離 れた場合 は、すべての モー タ
は OFFと な って ロボ ッ トは停止する。
本回路 の特徴 は、制御回路が簡単 で、制御 の仕組 みは極 めて分か りやす いことである。 しか し、磁
気 ライ ンの曲線 の曲率半径がノ さ くなるに従 い、 ライ ンに追従 で きな くなる欠点 がある。 ここを問題
Jヽ
解決学習 の始点 としたい。
ボール
キ ャ ス ター
ードスイッチ(A)
リ
ードスイッチ(B)
リ
左 車輸 モー タ
左 車輪 モー タ回路
S
右 車輸 モ ー タ回路
右 車輸 モー タ
ードスイッチ(B)
リ
(a)制
図1
3.2
ードスイッチ
リ
御 回路
(b)ロ ボ ッ ト底 面 の リー ドス ィ ッチ位 置
リー ドスイ ッチ 2個 用 いた磁気 ライン トレー ス型 ロボ ッ トの制御回路 とセンサ位置
リー ドスイ ッチ 4個 用 いた磁気 ライ ン トレー ス型 ロボ ッ ト制御回路
図 1(a)で 示 した回路では、曲率半 径 の小 さい コー スは追従できな くなる。 この欠点を発展的 に
解
決す るため、 さらに 2個 の リー ドスイ ッチを追加 した制御回路を図 2(a)に 、 リー ドスイ ッチの
取付
位置 を図 2(b)に 示す。 リー ドスイ ッチ (A)お よび (B)は 図 1(b)で 示 した位置 とし リー ドス
、
イ ッチ (C)お よび (D)は 車軸側寄 りで、外側 とする。
本回路 によ る制御 の仕組みを、図 2(b)で 示 した磁気 ライ ン側 か ら見 た ロボ ッ ト図 にお いて べ る
述
。
ードスイッチ(D)
リ
( outer )
ードスイッチ(B)
リ
(inner)
左 車輸 モ ー タ回 路
右 車輸 モ ー タ回路
左 車輸 モー タ
磁気 ラ
右 車輪 モー タ
り
B)
4:`キ
ヽ
(outer)
リードスイッチ(D)
(a)制
図2
御 回路
ードスイッチ(A)
リ
ードスイッチ(c)
リ
(b)ロ
ボ ッ ト底 面 の リー ド ス イ ッチ位 置
リー ドスイ ッチ 4個 用 いた磁気 ライン トレー ス型 ロボ ッ トの制御回路 とセンサ
位置
44
大 倉 宏 之・ 須 見 尚 文
01田
俊 明
磁気 ライ ンの位置 が リー ドスイ ッチ (A)側 に寄 るとリー ドスイ ッチ (B)が OFFと な り、右車輪 が停
止 して ライ ン中央 に戻 ろうとする。 この とき右車輪 は直 ちに停止できないため、若干 ゆるやかな旋回
となる。 このため、 リニ ドスイ ッチ (A)の みでは、ライ ンの曲率半径が小 さい場合 は ロボ ッ トの旋回
半径 の方 が大 きくな り、磁 気 ライ ンか らリー ドスイ ッチ (A)ま で も離れ、結果 として左右 のモー タ電
流が カ ッ トされて停止状態 とな って しまう。 そこで リー ドスイ ッチ (C)を 追加することによ り、 リー
ドスイ ッチ
(A)で 補 えなか った範囲 を リー ドスイ ッチ (C)が 補 い、 ロボ ッ トは停止す る ことな く磁
気 ライ ン上 に復帰 す る ことができる。
磁気 ライ ン上を完走 させ るために リー ドスイ ッチ (C)お よび (D)の 取付位置 は、 ロボ ッ トの速度
や ライ ンの曲率半径 を加味 して決定す る必要 がある。
3.3
リー ドスイッチ 4個 とリレーを用 いた磁気 ライ ン トレース型 ロボ ッ ト制御回路
磁気 ライ ンの曲率半径 が さらに小 さくな り、リー ドスイ ッチ4個 の制御回路 では制御 できな い場合、
3.2節 の図 2(a)回 路 の応用 として リー ドスイ ッチの数 を増 や して対応 す る ことが考 え られる。 しか
し、この方法 では リー ドスイ ッチの数 が増加 し続 ける。 そ こで、リレーを使 って解決 したのが図 3で 示
す制御回路である。
この制御回路 は、図 2(a)で 示 した回路 にお いて、 リー ドスイ ッチ (C)が ONし た瞬間か らロボ ッ
トは コー スか ら大 きく外 れたと判断 し、 この状態 を リレーに記憶 (保 持 )さ せ る。 そ して、 リー ドス
イ ッチ
(A)が ONす るまで、すなわち、 リー ドスイ ッチ (A)が 磁気 ライ ン上 に移動 するまで保持 し、
移動後、直 ちに リレーの記憶 を解除 させ るもので ある。
図 3に お いて、 リー ドスイ ッチ (A)上
に磁気 ライ ンがあれば、 リレーの働 きに
よ リモー タは ONと な る。次 は リー ドス
イ ッチ
(C)上 に移 ると、 その瞬間 か ら
゜
フッシュスイッチ
9)16
リー ドスイ ッチ (C)側 の リレー電流 は リ
レー端子 4と 8が 接続 され、 リー ドスイ ッ
チ (C)が OFFと な って もリレー電流 は流
れ、ONの 状態 を保持 (リ レーが記憶)す
ドスイ ッチ
(A)側 の リレーの接点 6と 4
を切 り離す必要 がある。す なわち、 リー
ドスイ ッチ
ードスイッチ(A)
リ
引V
3
る。 この リ レー電流 を切断 す るた めには
リー ドスイ ッチ (A)が ONと な って リー
左 車 輪 モ ー タ回 路
(A)が ONと なる条件 が必要
とな る。 この回路 には、 以下 の様 な利用
図 3 記憶 と解除の仕組み
価値 がある。 それは リー ドスイ ッチ (C)
シ
を瞬間的 にONさ せれば モー タは廻 り続 けることがで きるので、 リー ドスイ ッチ (C)に 並列 にブッ
ュスイ ッチを接続 しておけば、磁気 ライ ンが な い所 で もスイ ッチ操作 で走行 が可能 となる。 そ こで、
ス ー
図 4(a)に 示 したように、回路 にスター トボ タ ンを付加す る ことで、磁気 ライ ンのない場所 か ら タ
‐
トして、磁気 ライ ンを検出すると ライ ンの トレ スを始 める。磁気 ライ ンの一部 の磁石 を抜 いてお く
とその位置 で停止 す るが、 ス ター トボタ ンを押 す と再 び走行 をは じめ るといつた利用 も可能 である。
図 4(b)に 各 リー ドスイ ッチの配置例 を示 す。
45
ものづ くり学習 における磁気ライ ン トレース型 ロボットの教材化
ードスイッチ(c
リ
′左 車輸 モー タ
7{〉 岳
方
セ ンサ 取付板
・スイッチ(A)
リート
・スイッチ(B)
ート
リ
ードスイッチ(A)
リ
( inner )
ードスイッチ(D)
リ
ードスイッチ(c)
リ
左 車輪 モ ー タ回路
ードスイッチ(D)
リ
( outer )
ードスイッチ(B)
リ
右 車輸 モー タ
右車輸モー タ
右 車輪 モ ー タ回路
(a)制 御 回路
図4
(b)シ ャーシ裏面 の リー ドス イッチ位置
リ レー を追加 した磁気 ライ ン トレー ス型 ロボ ッ トの制御回路 とセ ンサ位置
3.4
ホ ール lCを 用 いた磁気 ライン トレース型 ロボ ッ ト制御回路
磁 石 の極 に反応 し、 デ ジタル信
号 に変換 して出力す るホール ICを
センサー と した磁 気 ライ ントレース
型 ロボ ッ トの基本 回路 を図 5に 示
す。今回用 いたホール ICは 松下電
子 工 業製 の DN6849SEで 交番磁界 」 3V
型 である の 。 このICの マー ク面 に
垂 直 に磁界を加え、加えた磁極がN
極か S極 かによ って端子 3か らH又
はLレ ベルの電圧を出力 し、異 なっ
た磁極を検出するまで保持す る。
図 6(a)に ホール ICを 用 いた磁
右 車 輪 モ ー タ回 路
図 5 ホール ICに よる制御回路例
気 ライ ン トレース型 ロボ ッ トの制御回路を示す。 セ ンサにホールICを 使用す る場合、磁気 ライ ンの磁
石 の極 を統一 しておかな ければな らな い。 そこで、 ロボ ッ ト側 か ら見た場合、磁気 ライ ンの中心線 に
対 して左側 を N極 、右側 を S極 として磁石 を路面 に埋設する。 ホールICの 取付位置は、磁気 ライ ン側
か らロボ ッ トを見た場合、磁気 ライ ンを挟 んで図 6(b)に 示す よ うに配置 し、かつ、ホールIC(A)は
46
大 倉 宏 之・ 須 見 尚 文
01田
俊 明
ICの マー ク面 が見える面、 ホール IC(B)は 逆 にマー ク面 を裏側 に して取 り付 ける。 このよ うにす る
ことで磁気 ライ ンの左右 の N極 、S極 を ホール ICが 認識 して、モー タ電流 の ON00FFを 制御 で きる。
ここでは,ホ ール IC(A)が S極 の とき右車輪 モー タは ON、 ホールIC(B)が
N極 の とき左車輪 モー
タは ONと な って ロボ ッ トは直進す る。仮 に コースを逆走 させようとして も、磁極が モー タを OFFに
する組み合わせ となるため走行 しな い。 このよ うにホールICを 用 いた制御 は、 リー ドスイ ッチでは出
来 なか った通行方向の制御 ができる特徴を有する。また、 ロボ ッ トを停止 させた いライ ン上 の場所 が
あれば、 その位置 の磁石 の極 を反転 させておけば よ く、鉄道 レールに見 られるような駅 の設置 などラ
イ ンに様 々な工夫 が可能 となる。更 に、本回路 にはスター トボ タ ンが用意 され、磁気 ライ ンのな い所
か らス タ▼ 卜できる設計 とした。
磁気
S
イン
N
セ ンサ取付板
8
G5V-2
右車輸 モー タ回路
2
3
(非 マーク面)
2SD635
TLP504(1/2)
左 車輸 モ ー タ回 路
右 車 輸 モー タ
TLP504(1/2)
(a)制 御回路
(b)シ
ヤーシ裏面のホール
IC位 置
図 6 ホ ー ル ICを 用 いた磁気 ライ ン トレース型 ロボ ッ トの制御 回路 とセ ンサ位 置
4.磁 気 ライ ン トレー ス型 ロボ ッ トの製作
これまで提示 した制御回路 に基 づ き、教示用 ロボ ッ トと走行試験用 ロボ ッ トを製作 した。
4.1
教示用磁気 ライ ン トレース型 ロボ ッ トの製作
磁気 ライ ン トレース型 ロボ ッ トの制御の仕組みを理解 させる教具 として、 リー ドスイ ッチによる自
動制御 と手動 による遠隔操作ができるロボ ットを製作 した。図 7(a)に 磁気 ライ ン側か ら見た ロボ ッ
ト本体 を、図 7(b)に リモー トコン トローラ (リ モコン)の パ ネル部を示す。
ロボ ッ ト本体の駆動部 はタ ミヤ製のツイ ンモータギヤボックスを低速仕様で用 い、 モータ電圧は 1.
5Vと した。制御回路は図 1(a)で 示 した リー ドスイッチ2個 による方法を用 い、 リー ドスイ ッチは車
ものづ くり学習における磁気ライ ン トレース型 ロボ ットの教材化
47
体前方 にお く。 自動・ 手動 の切 り替えは本体 に取 り付 けられた ゴネクタヘの差 し替 えで行 う。 リモコ
ンのパ ネル部 は操作用 スイ ッチとして、 プ ッシュスィ ッチとリー ドスイ ッチを併設す る。
本教示用 ロボ ッ トを使 うことによ り、 プ ッシュスィ ッチを押 して モー タを ON00FFさ せ る ことと、
リー ドスイ ッチに磁石 を近 づ ける こととが同 じ働 きを して いる ことを確認 させ、 リー ドスイ ッチの原
理を理解 させ る。次 に車体 に取 り付 けた リー ドスイ ッチに磁石を近 づ けて、磁石 の位置 とモー タの回
転 との関係 を理解 させ る。
なお、本 ロボ ッ トは磁気 ライ ンが直線か緩 やかなカー ブで しか完走 で きな い性能 として ある。授業
者 は本 ロボ ッ トを提示 しなが ら、 目的 とするコースを完走 させ ることがで きる磁気 ライ ン トレー ス型
ロボ ッ トを開発・ 製作 させ る活動 へ と誘導する。
一
一
一
一
常
一
一
一
一
一
一
一
一
一
一
=一
一
一
一
一
一
図7
トレー ス型 ロボ ッ ト
4.2走 行試験 のための磁気 ライン トレース型 ロボ ッ トの製作
図 2(a)、 図 4(a)、 図 6(a)に 示 した制御回
路 を用 いた磁気 ライ ン トレー ス型 ロボ ッ トの走
行性能を評価す るため、 それぞれ の制御方式 に
よ る磁 気 ライ ン トレース型 ロボ ッ トを各 1台 ず
つ製作 した。
製作 にあた り、ロボ ットのシャー シは図8で 示
す形状 とし、素材 は3mm厚 のプラバ ン (タ ミヤ
製)を 使用 した。
ヤセ ット (タ ミヤ製)、 キャスターはボールキャ
スター (タ ミヤ製)、 モー タ電圧は 1.5Vと した。
シ ャー シ上 面 に制御回 路基板 、 ッイ ンギヤ ッ
クス、電池ケースを置 き、下面 にはセ ンサおよび
キ ャスターを取 り付 ける。
8-3.5ご │り
:
一り 一 一 一
駆動装置はタ ミヤ製 のッイ ンモー タギャボ ッ
クスを低速使用 で用 い、 タィャはスポーッタィ
48
4。
田
大 倉 宏 之・ 須 見 尚 文・ 夕
2.1
俊 明
リー ドスイッチ 4個 用 いた磁気 ライン トレース型 ロボ ッ トの製作
図 9(a)に リー ドスイ ッチ4個 用 いた制御 ロボ ッ トを示 す。 また、図 9(b)に ロボ ッ トの シャー シ
裏面 に取 り付 けた リー ドスイ ッチ部を示 す。 リー ドスイ ッチは基板 に直接取 り付 け、各 リー ドスイ ッ
チの取付位置 は図 2(a)制 御回路 に対応 して いる。極 めて簡素 な磁気 ライ ン トレース型 ロボ ッ トであ
る。 ただ し、 リー ドスイ ッチの配置 はライ ンの カー プで コー スアウ トを防 ぐため、図 9(b)で 示す よ
うに配 置す る。 なお、 この配置 を生徒 自身が試行錯誤 の中か ら気付 くよ うに問題解決学習 を押 し進 め
(b)磁
気 ラインに対す るホールICの 取付面
一a
≧
│■ ■│ボ ,│卜 の外糧
(c)ホ ールICの 取付位 置
図 9 リー ドスイ ッチ4個 用いた磁気 ライ ン トレー ス型 ロボ ッ ト
り■卜:ス イッチ(C
)ロ
(轟 ‐
ボ ッ トの 外 観
リー ドス・
イ ジチ│の 1取 付 位 置
図 10 リー ドスイッチ 4個 とリレーを用 いた磁気 ライ ン トレー ス型 ロボ ッ ト
ものづ くり学習における磁気ライン トレース型 ロボットの教材化
4.2.2
49
リー ドスイ ッチ4個 とリレーを用 いた磁気 ライン トレース型 ロボ ッ トの製作
図 10(a)に 制御回路に リレー回路を付加 した ロボ ットを示す。 リレーを作動 させるため、電源電圧
を 3Vと したも また、電池ケースの横 のスター トボタンを押せば、磁気 ライ ンのない所か ら走行でき、
磁気 ライ ンを検出す るとライ ンに沿 って走行を始 める。
リレーは図 10(b)の よ うに4個 並 べて取 り付 けた。各 リー ドスイ ッチの配置は図 10(c)に 示す。
ここで、 リー ドスイ ッチ 4個 のみの場合 と同様 に外側 の リー ドスイ ッチを下 げて配置すると磁気 ライ
ンが とぎれた場合、外側 の リー ドスイ ッチが不用意 にONと な り、ロボ ッ トは勝手 に旋回 を始 めて しま
うことがある。本 ロボ ッ トの場合 もセ ンチの位置は常 に問題解決学習 の課題 として取 り扱え る。
4.2.3 ホ ール ICを 用 いた磁気 ライン トレース型 ロボ ッ トの製作
図 H(a)に 磁気 セ ンサにホールICを 使用 した ロボ ットを示す。制御回路は図 6(a)に 示 した回路
を用 い、車体前方 の基板 に制御回路は組み込 まれて いる。 ホールIC用 電源 として単 3電 池 4本 用 いた。
電池ケースの横 にス ター トボ タ ンを取 り付 けた。 モー タ用電源 には単 2乾 電池を 1個 使用 した。 ホー
ル ICは 図 H(b)に 示す ように、一方 のホール IC(A)は マー ク面 を磁気 ライ ン側 に、他方 のホール
IC(B)は 非 マー ク面 が磁気 ライ ン側 にな るように取 り付 ける。 また、図 11(c)に ホールICの ロボ ッ
トヘ の取付位置を示す。
)ロ
ボ ッ トの 外観
(b)
シヤーン琴爾││‐ ■111イ │イ
││す
1魯
付位簿
図 11 ホ ール ICを 用 いた磁気 ライ ン トレー ス型 ロボ ッ ト
5。
走行試験 および考察
5.1
テス トコー ス
図 12に テ ス ト用磁気 ライ ンコー スを示す。磁気 ライ ンの磁石は市販品 を用 い、 サイズは 10rrln×
5mm× 30mmで 磁束密度 H00Gの
ものを使用 した。 コー スの最小曲率半径 は H5mmで ある。磁石
50
田
大 倉 宏 之・ 須 見 尚 文・ 夕
俊 明
うに配列 した。使用 した磁 石 の数 は 100個 であ
る。 コー スは破線 の ところで 2分 割 されて いる。
×30mmの 面 を置 き、磁石が移動 しな いよ うに
両側 か ら4mmの バ ルサ材 で固定 した。 磁石 の
上面 は 2mm厚 の塩 ビ板 で覆 った。
N
S極 、
磁 気 ライ ンの製作 では 900m× 600mm×
5mllの 合板 2枚 を並 べ、 その上 に磁 石 の 5mln
ジ
び
゛
C
%
可︱︱劃﹁︱︱⊥
の列 は ライ ンの内側 は S極 、外側 をN極 となるよ
図 12テ ス トコー ス
5`2走 行試験 の結果 および考察
製作 した ロボ ッ トの うち、 リー ドスイ ッチ4個 による制御 ロボ ッ ト、 リー ドスイ ッチ4個 と リレーに
よる制御 ロボ ッ トおよびホール ICに よる制御 ロボ ッ トの走行試験 の結果 を述 べ る。
べ
ロ
各 ロボ ッ トと も図 8で 示 した シャー シ板 のセ ンサ位置 に各 セ ンサを配置 した結果、 す ての ボ ッ
トは コー スを完走 した。 リー ドスイ ッチタイプでは磁石か らセ ンサ までの垂直方向の距離 を 12mm離
して いるが問題 は生 じて いない。 このときの リー ドスイ ッチ付近 の磁束密度 は50G程 度 である。 この
ことは磁気 ライ ンに使 われ る磁石 の磁束密度 が小 さい場合 は リー ドスイ ッチを近 づ ける ことで対応 で
ロ
きる ことを示 して いる。 また、磁気 ライ ンの上 に合板 を敷 き、 いろいろな建造物 を用意 する ことで
ボ ッ ト走行 の演出が楽 しめ る。 ホール ICタ イ プでは磁石か らセ ンサ までの高 さは 3mと して い る。
リー ドスイ ッチに比 べて磁 気 ライ ンに近 づ ける必要 がある。
ン
磁気 ライ ンのな い任意 の場所 か ら自走機能 を持 たせた 2台 の ロボ ットを走行 させ、磁気 ライ に交
差 させた結果、 ホール ICタ イ プは磁気 ライ ンを認識 して、 ライ ンの進行方向を認識 して走行 し、逆走
ン
の
す る ことはなか った。 リー ドスイ ッチタイプは磁気 ライ ンとの交差角度 によ って鈍角側 ライ を走
づ 80∼ 100度 付
行 し始 める。図 10(c)で 示 した リー ドスイ ッチの配置 では、交差角度 が直角 に近 く
近 の範囲 では ライ ンを認識 すると停止 した。
ロボ ッ トの製作 を通 して、センサの位置 や配置 によ って走行性能 は大 きく変化 す る ことを確認 した。
ここに生徒 の創意工夫 と問題解決学習 の成果 が ロボ ッ トの走行性能 とい う評価 に表 れ、 ものづ くり教
材 として期待 できる。
6. おわ りに
ロボ ッ トを設計・ 製作 し
ー
本研究 では、 ものづ くり学習 における教材 として、磁気 ライ ン トレ ス型
ー スイ ッ
た。 この磁気 ライ ン トレース型 ロボ ッ トには、制御 の基本 が含 まれてお り、初学者 で もリ ド
こ
チを使 うだ けで製作 できるとともに学習 に応 じて、 よ り高度 な制御学習 へ と発展 できる題材 である
な ライ
とがわか った。例 えば、 リー ドスイ ッチ 4個 だけ使 って もセ ンサの配置 を工夫す ることで複雑
ン上を正確 に制御 でき、更 に、簡単 な リレー回路 を付加 す る ことによ り、 ロボ ッ トが コースア ウ トし
な
た場合 の 自己位置 のずれを記憶 し、 ライ ンに戻 ったときはその記憶 を解除 させ るなど、制御 に必要
セ ンスで きるホーノ
ンIC
記憶・ 解除 といった学習 を取 り入 れ られる ことがで きる。 さらに、磁石 の極 を
を用 い ることで、通行方 向が制限 された コー スを磁石 の極 か ら判断 する高度 な
ロボ ッ トヘ と発展 で き
51
ものづ くり学習 における磁気ライントレース型 ロボットの教材化
る ことが示 された。
ものづ くり学習 では、試行錯誤 を繰 り返す中で創意工夫 を育 み、 その 目的が達成 されたときの喜 び
を体験 で きる ことが望 まれ る。本研究 で開発 した磁気 ライ ン トレース型 ロボ ッ トも、種 々の制御回路
を工夫す ることがで き、 セ ンサの適切 な配置 を見 つ け出すために多 くの試行錯誤 などの経験 が含 まれ
る。 あるときは理論的 に、 あるときは実験的 に繰 り返す活動 の中で創意工夫 が育 まれ、 ロボ ッ トを完
走 させた ときに経験 する達成感、満足感 を与 える。 この ことか らも磁気 ライ ン トレース型 ロボ ッ トは
ものづ くり学習 における有効 な教材 といえる。
引用・ 参考文献
1)文 部省 :中 学校学習指導要領
2)大 倉宏之、木村誠、須見尚文
(平 成
10年 12月
)解 説 ―技術・ 家庭編 ―,p.102,(1999)
:も のづ くり学習 としての ロボ コンの位置づ けと教材研究
0開 発
,
日本産業技術教育学会誌第 43巻 第 4号 ,2001年 12月
3)鈴 木憲次
:ラ イ ン トレース ロボ ッ トの製作 ,ト
,pp.25-33,(2001)
ラ ンジス タ技術 ,2000年 8月 号 ,pp.222-230,
(2000)
4)ト ップマ ン :技 術教材 カ タログNoe148(平 成 14年 度版),poH3,(2002)
5)畑 俊明、塚本朋子、中村勇 :児 童生徒 自身で作 るセ ラ ミックス磁石 の教材化 に関す る研究 ,
日本
産業技術教育学会第 45回 全国大会講演要 旨集,p.33,(2002)
6)柏 倉宏美 :位 置検出 セ ンサの使 い方、 トラ ンジス タ技術,2000年 H月 号,pp。 188-191,(2000)
7)松 下電子工業 :Panasonicホ ール ICシ リーズ第 4版 '93/9商 品別 カ タログ,ppe26-27,(1993)