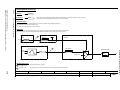
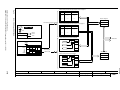
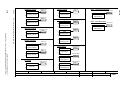
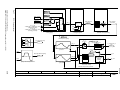
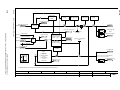
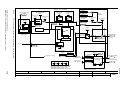
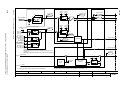
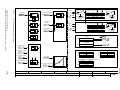
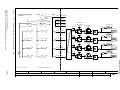
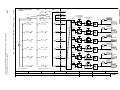
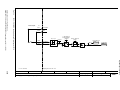
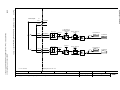
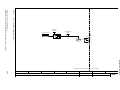
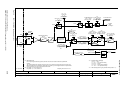
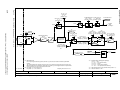
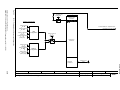
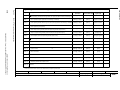
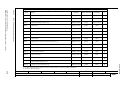
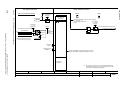
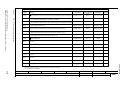
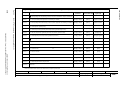
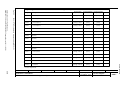
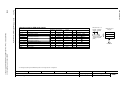
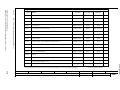
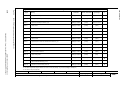
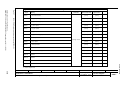
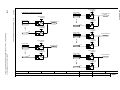
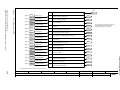
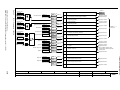
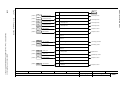
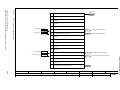
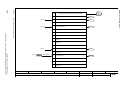
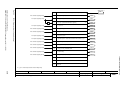
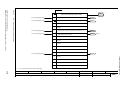
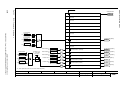
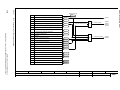
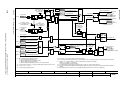
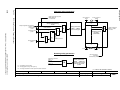
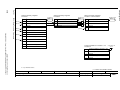
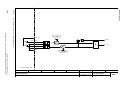
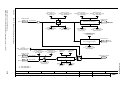
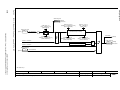
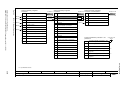
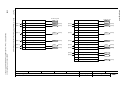
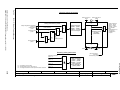
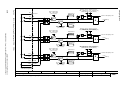
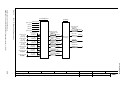
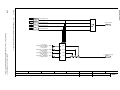
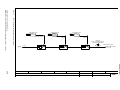
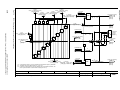
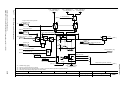
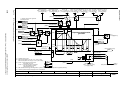
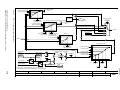
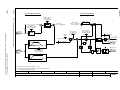
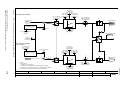
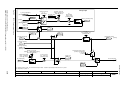
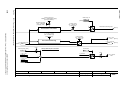
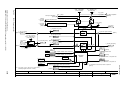
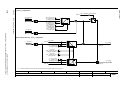
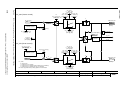
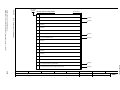
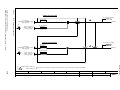
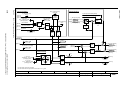
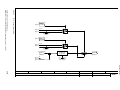
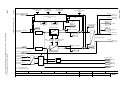
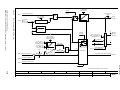
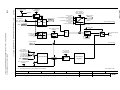
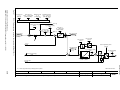
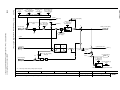
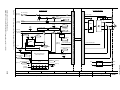
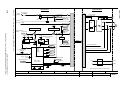
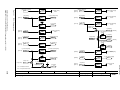
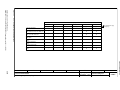
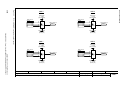
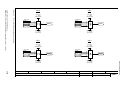
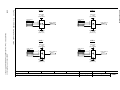
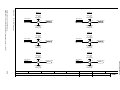
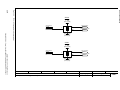
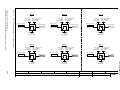
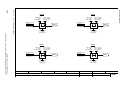
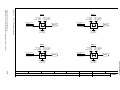
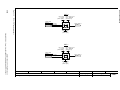
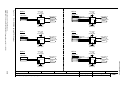
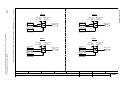
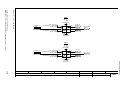
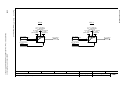
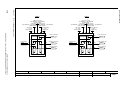
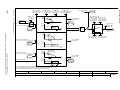
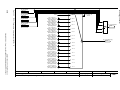
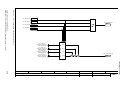
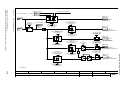
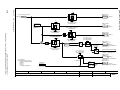
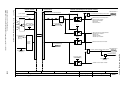
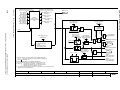
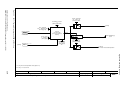
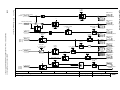
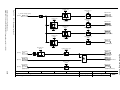
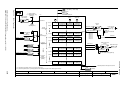
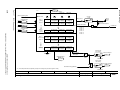
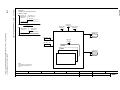
Function diagrams Technology functions 2.13 Technology functions Function diagrams 7017 – DC brake (p0300 = 1) 2-628 © Siemens AG 2011 All Rights Reserved SINAMICS G120 / Control Units CU240B/E-2 Parameter Manual (LH11), 01/2011 2-627