1
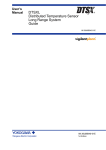
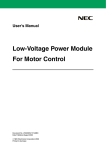
Rotor position/speed feedback UM1052 Figure 48. 60° and 120° displaced Hall sensor output waveforms 3 sensors 120° 3 sensors 60° H1 H1 H2 120° H2 60° H3 H3 H1 H1 H2 H2 H3 H3 ai14826 Because the rotor position information they provide is absolute, there is no need for any initial rotor prepositioning. Particular attention must be paid, however, when connecting the sensors to the proper microcontroller inputs. This software library assumes that the positive rolling direction is the rolling direction of a machine that is fed with a three-phase system of positive sequence. In this case, to work correctly, the software library expects the Hall sensor signal transitions to be in the sequence shown in Figure 48 for both 60° and 120° displaced Hall sensors. For these reasons, it is suggested to follow the instructions given below when connecting a Hall-sensor equipped PM motor to your board: 56/127 1. Turn the rotor by hand in the direction assumed to be positive and look at the B-emf induced on the three motor phases. If the real neutral point is not available, it can be reconstructed by means of three resistors, for instance. 2. Connect the motor phases to the hardware respecting the positive sequence. Let “phase A”, “phase B” and “phase C” be the motor phases driven by TIM1_CH1, TIM1_CH2 and TIM1_CH3, respectively (for example, when using the MB459 board, a positive sequence of the motor phases could be connected to J5 2,1 and 3). 3. Turn the rotor by hand in the direction assumed to be positive, look at the three Hall sensor outputs (H1, H2 and H3) and connect them to the selected timer on channels 1, 2 and 3, respectively, making sure that the sequence shown in Figure 48 is respected. 4. Measure the delay in electrical degrees between the maximum of the B-emf induced on phase A and the first rising edge of signal H1. Enter it in the MC_hall_param.h header file (HALL_PHASE_SHIFT). For your convenience, an example with HALL_PHASE_SHIFT equal to –90 °C is illustrated in Figure 49. Doc ID 18458 Rev 3