1
UM0312
User manual
STR750
Sensored PMSM field-oriented control software library V1.0
Introduction
The STR750 microcontroller comes with a dedicated set of peripherals designed for field
oriented control (FOC) of both permanent magnet DC/AC motors (PMDC/PMAC also called
BLDC) and AC induction motors. It is delivered with two software libraries that allow you to
develop applications to control these motors.
■
The PMSM software library
■
The AC induction motor software library
The complete library source files are delivered with the STR750-MCKIT, and are also
available for free on the ST website www.stmcu.com, in the Support section. Check this site
for the latest version of the library.
This user manual describes the PMSM software library required to control a permanent
magnet synchronous motor with an encoder and a sinewave drive, open or closed loop. The
AC induction motor software library designed to control an AC induction motor in sinewave
mode with sensors is described in the UM0324 User Manual.
The PMSM software library is composed of several C modules, compatible with the IAR
EWARM toolchain. The functions are grouped into several families, making this library an
easy way to go through any PM sensored motor project development. Used in conjunction
with the STR750-MCKIT starter kit, evaluation can be achieved in a very short time,
because the software library spares you the trouble of studying the MCU in detail.
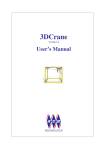
Overall software architecture
The figure below shows the architecture of the firmware. It uses the STR750 Standard
Library extensively but it also acts directly on hardware peripherals when optimizations in
terms of execution speed or code size are required.
L
APPLICATION LAYER
Speed, Flux and
Torque PIDs
STR750
Std
Library
User
Interface
PM Motor Drive
Speed
Current
SVPWM
feedback feedback
Motor Control Library
GPIO
TB
TIM
ADC
DMA
PWM
Peripherals
February 2007
Rev 1
1/84
www.st.com
UM0312
PMSM software library 1.0 features (CPU running at 60MHz)
■
Permanent magnet motor with encoder:
– Open loop operation
– Closed loop operation, PID regulation with 0.5ms to 127ms sampling time
■
Current sampling method:
– 2 isolated current sensors
– 3 shunt resistors
■
Current regulation for torque and flux control:
PIDs, sampling time adjustable up to the PWM frequency
■
Note:
16-bit space vector PWM generation frequencies:
– PWM frequency can be manually adjusted
– Centered PWM pattern type
– 11-bit resolution at 14.6kHz
●
Free C source code and spreadsheet for look-up tables
●
Motor control modules developed in accordance with MISRA C rules
These figures are for information only; this software library may be subject to changes
depending on the final application and peripheral resources. Note that it was built using
robustness-oriented structures, thus preventing the speed or code size from being fully
optimized.
The table below summarizes the memory required by the software library, as it is delivered
(three-shunt topology for the current reading, encoder for speed feedback). These metrics
include non motor control related code, implemented for demo purposes (such as user
interface via LCD and joystick). Therefore, the figures provided should be considered as an
estimation, which would be lower in the final application.
Size (Kbyte)
ROM
RAM
27.5
3
Related documents:
Available on www.st.com:
●
STR750 User Manual,
●
STR750 Datasheet,
●
STR750 Standard Library User Manual,
●
STR7 Flash Programming Manual
Available on www.arm.com:
ARM7TDMI-S Rev.4 Technical Reference Manual ARM DDI 0234A
2/84
UM0312
Contents
Contents
1
Getting started with tools . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.1
Working environment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.2
Software tools . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.3
Library source code . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.4
2
1.3.1
Download . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.3.2
File structure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.3.3
Starting the IAR toolchain . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Customizing the workspace for your STR75x device . . . . . . . . . . . . . . . . 12
1.4.1
Inkarm_xxx.xcl file (internal/external flash or RAM based project) . . . . 12
1.4.2
Extended linker file setting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Getting started with the library . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.1
PMSM FOC drive quick introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.2
Pre-checks and library configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.2.1
Library configuration file: 75x_MCconf.h file . . . . . . . . . . . . . . . . . . . . 16
2.2.2
Permanent magnet motor parameters: MC_PMSM_motor_param.h
file . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.2.3
Encoder parameters: MC_ENCODER_param.h file . . . . . . . . . . . . . . . . 18
2.2.4
Drive control parameters: MC_Control_Param.h file . . . . . . . . . . . . . 18
Maximum modulation index . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .19
Power device control parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .19
Flux and torque PID regulators sampling rate . . . . . . . . . . . . . . . . . . . . . . . . . . .19
Speed regulation loop frequency . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .19
Speed controller setpoint and PID constants (initial values) . . . . . . . . . . . . . . . .20
Torque and flux controller setpoints and PID constants: . . . . . . . . . . . . . . . . . . .20
Linear variation of PID constants according to mechanical speed . . . . . . . . . . . .21
3
2.3
Running your own motor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.4
Closed loop operation and PID settings . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.5
How to define and add a module . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
Running the demo program . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.1
LCD display in OPEN loop mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.2
LCD display in CLOSED loop mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.3
Setting up the system when using ICS sensors . . . . . . . . . . . . . . . . . . . . 27
3/84
Contents
4
UM0312
3.3.1
Connecting the two ICS sensors to the motor and to STR750 . . . . . . . 27
3.3.2
Selecting PHASE_A_CHANNEL and PHASE_B_CHANNEL . . . . . . . . 28
3.4
Managing the incremental encoder . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.5
Fault messages . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.6
Note on debugging tools . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
Motor control library routines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
4.1
Library reference . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
4.2
Motor control software layer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
4.2.1
75x_svpwm_3shunt module . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
SVPWM_3ShuntInit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .32
SVPWM_3ShuntCurrentReadingCalibration . . . . . . . . . . . . . . . . . . . . . . .33
SVPWM_3ShuntGetPhaseCurrentValues . . . . . . . . . . . . . . . . . . . . . . . . . . .33
SVPWM_3ShuntCalcDutyCycles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .34
SVPWM_3ShuntGPADCConfig . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .34
4.2.2
Space vector PWM implementation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4.2.3
Current sampling in three shunt topology and general purpose A/D
conversions
4.2.4
37
Tuning delay parameters and sampling stator currents in three-shunt
resistor topology . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
Case 1: Duty cycle applied to Phase A low side switch is larger than
DT+TN+ 2TS + TH + TDMA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .40
Case 2: DT+TN+TS < Phase A duty cycle < DT+TN+ 2TS + TH + TDMA. . . . . .42
Case 3: Phase A pulse width < DT+TN+TS . . . . . . . . . . . . . . . . . . . . . . . . . . . . .44
4.2.5
75x_svpwm_ICS module . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
SVPWM_IcsInit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .48
SVPWM_IcsCurrentReadingCalibration . . . . . . . . . . . . . . . . . . . . . . . . . .49
SVPWM_IcsGetPhaseCurrentValues . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .49
SVPWM_IcsCalcDutyCycles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .50
4.2.6
Isolated current sensor topology current sampling and general purpose
(GP) A/D conversions integration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
4.2.7
MC_Clarke_Park.h module . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
Clarke . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .52
Park . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .53
Rev_Park . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .53
Rev_Park_Circle_Limitation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .54
4.2.8
Detailed explanation about reference frame transformations . . . . . . . . 54
4.2.9
Circle limitation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
Example: max modulation index of 95%. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .58
4.2.10
4/84
75x_encoder.c module . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
UM0312
Contents
ENC_Init . . . . . . . . . . . . . . . . . . . . . . . . . 59
ENC_GetPosition . . . . . . . . . . . . . . . . . . . . . 59
ENC_Get_Electrical_Angle . . . . . . . . . . . . . . . . . 59
ENC_Get_Mechanical_Angle . . . . . . . . . . . . . . . . . 60
ENC_ResetEncoder . . . . . . . . . . . . . . . . . . . . . 60
ENC_Clear_Speed_Buffer . . . . . . . . . . . . . . . . . . 60
ENC_Get_Speed . . . . . . . . . . . . . . . . . . . . . . 61
ENC_Get_Average_Speed . . . . . . . . . . . . . . . . . . 61
TIMx_UP_IRQHandler - interrupt routine . . . . . . . . . . 61
4.2.11
75x_TBTimer.c module . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
TB_Timebase_Timer_Init . . . . . . . . . . . . . . . . . . 62
TB_Wait . . . . . . . . . . . . . . . . . . . . . . . . . 62
TB_Set_Delay_500us . . . . . . . . . . . . . . . . . . . . 62
TB_Delay_IsElapsed . . . . . . . . . . . . . . . . . . . . 63
TB_Set_DisplayDelay_500us . . . . . . . . . . . . . . . . 63
TB_Set_DebounceDelay_500us . . . . . . . . . . . . . . . . 63
TB_DebounceDelay_IsElapsed . . . . . . . . . . . . . . . . 63
TB_IRQHandler . . . . . . . . . . . . . . . . . . . . . . 64
4.2.12
75x_it.c module . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
PWM_EM_IRQHandler . . . . . . . . . . . . . . . . . . . . 65
ADC_IRQHandler . . . . . . . . . . . . . . . . . . . . . . 65
4.2.13
MC_PID_regulators.c module . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
PID_Init . . . . . . . . . . . . . . . . . . . . . . . . . 66
PID_Flux_Regulator . . . . . . . . . . . . . . . . . . . . 67
PID_Torque_Regulator . . . . . . . . . . . . . . . . . . . 67
PID_Speed_Regulator . . . . . . . . . . . . . . . . . . . 68
PID_Reset_Integral_terms . . . . . . . . . . . . . . . . . 68
PID_Speed_Coefficients_update . . . . . . . . . . . . . . 68
PID_Integral_Speed_update . . . . . . . . . . . . . . . . 68
4.3
5
Application layer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
4.3.1
main.c module . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
4.3.2
MC_Keys.c module . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
4.3.3
MC_Display.c module . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
4.3.4
75x_LCD.c module . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
4.3.5
MC_dac.c module . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
4.3.6
MC_misc.c module . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
PID regulator implementation and tuning . . . . . . . . . . . . . . . . . . . . . . . 70
5.1
Theoretical background . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
5.2
Regulation sampling time . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
5/84
Contents
UM0312
5.2.1
Adjusting the regulation sampling time . . . . . . . . . . . . . . . . . . . . . . . . . 71
5.2.2
Adjusting the speed regulation loop Ki, Kp and Kd vs the motor
frequency
72
Disabling the linear curve computation routine, 75x_it.c module. . . . . . . . . . .73
6
5.3
Tricks and traps . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
5.4
Implementing closed loop regulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
MISRA compliance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
6.1
Analysis method . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
6.2
Limitations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
6.3
MISRA compliance for PMSM library files . . . . . . . . . . . . . . . . . . . . . . . . 77
Appendix A Additional information. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
7
6/84
A.1
Adjusting CPU load related to PMSM FOC algorithm execution. . . . . . . . 79
A.2
Selecting PWM frequency for 3 shunt resistor configuration. . . . . . . . . . . 80
A.3
Fixed-point numerical representation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
A.4
Additional or up-to-date technical literature. . . . . . . . . . . . . . . . . . . . . . . . 82
A.5
References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
Revision history . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
UM0312
List of tables
List of tables
Table 1.
Table 2.
Table 3.
Table 4.
Table 5.
Table 6.
Device summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Sector identification . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
PWM frequency vs maximum duty cycle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
MISRA compliance of PMSM library files . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
System performance when using STR750-MCKIT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
Document revision history . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
7/84
List of figures
UM0312
List of figures
Figure 1.
Figure 2.
Figure 3.
Figure 4.
Figure 5.
Figure 6.
Figure 7.
Figure 8.
Figure 9.
Figure 10.
Figure 11.
Figure 12.
Figure 13.
Figure 14.
Figure 15.
Figure 16.
Figure 17.
Figure 18.
Figure 19.
Figure 20.
Figure 21.
Figure 22.
Figure 23.
Figure 24.
Figure 25.
Figure 26.
Figure 27.
Figure 28.
Figure 29.
Figure 30.
Figure 31.
Figure 32.
Figure 33.
Figure 34.
Figure 35.
Figure 36.
Figure 37.
Figure 38.
Figure 39.
8/84
JTAG interface for debugging and programming . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
Library structure for PMSM software library version 1.0 . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Linker file selection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
FOC drive placed in a speed loop . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
PMSM FOC structure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Alignment procedure. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
Creating a new file . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Adding a file to the workspace . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Key function assignments . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
Main.c state machine . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
Closed loop start-up strategy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
ICS hardware connections . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
Encoder output signals: counter operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
DBGC bit in PWM control register (from STR750 reference manual). . . . . . . . . . . . . . . . . 30
Vα and Vβ stator voltage components . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
SVPWM phase voltage waveforms . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
PWM and TIM0 synchronization (REP_RATE=1) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
Three shunt topology current sampling and GP A/D conversions integration
(REP_RATE=1) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
Inverter leg and shunt resistor position . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
Low side switches gate signals (low modulation indexes) . . . . . . . . . . . . . . . . . . . . . . . . . 41
Low side Phase A duty cycle > DT+TN+ 2TS + TH + TDMA . . . . . . . . . . . . . . . . . . . . . . . 41
DT+TN+TS< Low side Phase A duty cycle < DT+TN+2TS+TH+TDMA and
ΔDutyA-B<DT+TN+TS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
DT+TN+TS < Low side Phase A duty cycle < DT+TN+2TS+TH+TDMA and
ΔDutyA-B<DT+TN+TS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
DT+TN+TS < Low side Phase A duty cycle < DT+TN+2TS+TH+TDMA and
ΔDutyA-B>DT+TN+TS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
DT+TN+TS < Low side Phase A duty cycle < DT+TN+2TS+TH+TDMA and
ΔDutyA-B>DT+TN+TS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
Low side duty cycle Phase A < DT+TN+TS and
ΔDutyA-B > DT+TN+2TS+TH+TDMA. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
Low side duty cycle Phase A < DT+TN+TS and
ΔDutyA-B > DT+TN+2TS+TH+TDMA. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
Figure 31: Low side duty cycle Phase A < DT+TN+TS and
DT+TRise+TS < ΔDutyA-B < DT+TN+2TS+TH+TDMA . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
Low side duty cycle Phase A < DT+TN+TS and
DT+TRise+TS < ΔDutyA-B < DT+TN+2TS+TH+TDMA . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
Low side duty cycle Phase A < DT+TN+TS and DutyA-B< DT+TRise+TS . . . . . . . . . . . . 47
Stator currents sampling and GP conversions in ICS configuration (REP_RATE=1) . . . . . 51
Clarke, Park, and Reverse Park transformations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
Transformation from an abc stationary frame to a qd rotating frame . . . . . . . . . . . . . . . . . 55
Circle limitation working principle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
Example with Iq = 32000, Id = -5000 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
ADC interrupt request processing. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
PID general equation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
Time domain to discrete PID equations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
Speed regulation sampling time adjustment in 75x_TBtimer.c . . . . . . . . . . . . . . . . . . . 71
UM0312
Figure 40.
Figure 41.
Figure 42.
Figure 43.
Figure 44.
Figure 45.
Figure 46.
List of figures
Linear curve for coefficient computation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
Speed regulation loop call in 75x_TBTimer.c . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
Torque/flux control loop block diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
Speed control loop block diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
Example of function call generating a MISRA rule 45 error . . . . . . . . . . . . . . . . . . . . . . . . 76
AD conversions for three shunt topology stator currents reading and PMSM FOC
algorithm execution when REP_RATE=3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
FAD conversions for three shunt topology stator current readings and PMSM FOC
algorithm execution when REP_RATE=1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
9/84
Getting started with tools
1
UM0312
Getting started with tools
To develop an application for a PM sensored motor using the PMSM software library, you
must set up a complete development environment, as described in the following sections. A
PC running Windows 2000 (SP4) or Windows XP (SP2) is necessary.
1.1
Working environment
The PMSM software library was fully validated using the main hardware board included in
the STR750-MCKIT starter kit (a complete inverter and control board). The STR750-MCKIT
starter kit provides an ideal toolset for starting a project and using the library. Therefore, for
rapid implementation and evaluation of the software described in this user manual, it is
recommended to acquire this starter kit.
It is also recommended to install the IAR EWARM C toolchain which was used to compile
the PMSM software library. With this toolchain, you do not need to configure your
workspace. You can set up your workspace manually for any other toolchain. A free
“kickstart editio”n of the IAR EWARM C toolchain with a 32Kb limitation, which is enough to
compile and evaluate this library, can be downloaded from http://www.iar.com.
1.2
Software tools
A complete software package consists of:
●
A third-party integrated development environment (IDE).
●
A third-party C-compiler: the EWARM development environment from IAR is preconfigured (30 days time-limited or 32Kb kickstart versions can be obtained upon
request for evaluation).
This library was compiled using the third party IAR EWARM C-toolchain. However, the
choice of the C toolchain is left to your own appreciation. An IAR dedicated workspace
can be directly opened in the root of the library installation folder (See Section 1.3).
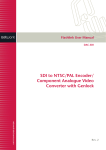
●
JTAG interface for debugging and programming
Using the JTAG interface of the MCU, you can enter in-circuit debugging sessions with
most toolchains. Each toolchain can be provided with an interface connected between
the PC and the target application.
Figure 1.
JTAG interface for debugging and programming
IDE
JTAG
interface
JTAG
peripheral
STR750
Application
board
The JTAG interface can also be used for in-circuit programming of the MCU. Other
production programmers can be obtained from third-parties.
10/84
UM0312
Getting started with tools
1.3
Library source code
1.3.1
Download
The complete library source files are available for free download on the ST web site
www.stmcu.com, in the Support section.
Note:
It is highly recommended to check for the latest releases of the library before starting any
new development, and then to verify from time to time all release notes to be aware of any
new features that might be of interest for your project. Registration mechanisms are
available on ST web sites to automatically obtain updates.
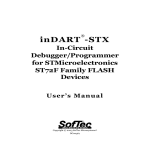
1.3.2
File structure
The PMSM software library contains the workspace for the IAR toolchain. Once the
download files are unzipped, the following library structure appears as shown in Figure 2.
Figure 2.
Library structure for PMSM software library version 1.0
STR750 FOC Firmware Libraries v1.0
\ StdLib
\ FOC_PMSM_SR_v1.0
\ IAR
\ Debug
\ Release
\ Settings
\ config
\ Include
\ Source
\ FOC_AC_SR_v1.0
\ ...
The STR750 FOC Firmware Libraries v1.0 folder contains the firmware libraries for
running both PMSM and AC induction three-phase sensored motors.
The Stdlib folder contains the standard library for the STR750. It provides standard routines
for the configuration of the STR750 peripherals. This library is described in the STR75x
Software Library User Manual UM0218.
The Include folder contains all the standard library header files: function prototypes, global
variables, compiler directives.
The Source folder contains all library C source files and dedicated routines for the control of
a permanent magnet motor with an encoder. These functions are described in this manual
in Section 4: Motor control library routines on page 31.
The IAR folder contains the configuration file for the IAR C toolchain (kickstart, evaluation or
standard edition).
11/84
Getting started with tools
1.3.3
UM0312
Starting the IAR toolchain
When you have installed the toolchain, you can open the workspace directly from the
dedicated folder, by double-clicking on the PMSM Sensored.eww file.
The file location is:
\ FOC_PMSM_SR_v1.0\ IAR\ PMSM Sensored.eww
1.4
Customizing the workspace for your STR75x device
The library described in this manual was written for the STR750FVT2. However, it works
equally successfully with all the products in the STR75x family.
Using a STR750 sales type different from the STR750FVT2 may require some modifications
to the library, according to the available features (some of the I/O ports are not present on
low-pin count packages). Refer to the datasheet for details.
Depending on the memory size, the workspace may have to be configured to suit your
STR75x MCU.
Table 1.
1.4.1
Device summary
Inkarm_xxx.xcl file (internal/external flash or RAM based project)
The IAR\ config folder contains 3 files:
●
Inkarm_flash.xcl
●
Inkarm_smi.xcl
●
Inkarm_ram.xcl
These files are used as an extended command linker file and contain linker options. Memory
areas, start address, size, and other parameters are declared here. It also contains the
value assigned to the stack size for each ARM operating mode (for example, USER or FIQ.
Refer to the ARM7TDMI-S Technical Reference Manual for more information).
12/84
UM0312
Getting started with tools
The default extended linker file used in the standard library to configure the device for
internal flash based resident firmware is Inkarm_flash.xcl. An extract of this file
showing the definitions of heap and stack size is provided below. Depending on the project
requirements, it may be necessary to manually edit the segment sizes.
// Embedded Flash (256/128/64Kbytes)
// The user has to change the flash memory length depending STR75xFxx
devices
// Code memory in flash
-DROMSTART=0x20000000
-DROMEND=0x2003FFFF
//0x2001FFFF;0x200FFFF
// Data memory
-DRAMSTART=0x40000000
-DRAMEND=0x40003FFF
........
//************************************************************************
*
// Stack and heap segments.
//************************************************************************
// Add size >0 for ABT_Stack, UND_Stack if you need them.
// size must be 8 byte aligned.
-D_CSTACK_SIZE=0x200
-D_SVC_STACK_SIZE=0x20
-D_IRQ_STACK_SIZE=0x100
-D_FIQ_STACK_SIZE=0x40
-D_ABT_STACK_SIZE=0x0
-D_UND_STACK_SIZE=0x0
-D_HEAP_SIZE=0x400
Memory size modifications must be done according to the MCU specifications. Default
settings are done for a 256Kb embedded flash memory. Depending on the project
requirements, stack and heap segment size might also need to be changed.
1.4.2
Extended linker file setting
As mentioned in the previous section, the IAR workspace is provided by default with the
internal flash extended linker file Inkarm_flash.xcl. To modify the workspace to use a
different file:
1.
Open the IAR workspace by double-clicking on the \ FOC_PMSM_SR_v1.0\ IAR \
PMSM Sensored.eww file.
2.
Go to the Project menu, select Options... then Linker, and select the Config submenu.
The dialog box shown in Figure 3 is displayed.
3.
In the Linker command file section, tick the Override default checkbox, select the
linker file you want to use, and then click OK.
13/84
Getting started with tools
Figure 3.
14/84
Linker file selection
UM0312
UM0312
Getting started with the library
2
Getting started with the library
2.1
PMSM FOC drive quick introduction
The PMSM software library is designed to achieve the high dynamic performance in
permanent magnet motor control offered by the field oriented control (FOC) strategy.
Through complex machine electrical quantity transformations, this well-established drive
system optimizes the system efficiency, to the extent that it is able to offer decoupled torque
(Te) and magnetic flux (λ) control.
Figure 4.
ωr* +
FOC drive placed in a speed loop
Torque
controller
iqs*
Flux controller
ids*
FOC
-
3 phase
inverter
3ph PMSM
motor
~
actual rotor speed
Basic information on field oriented structure and library functions is represented in Figure 5.
●
The θ λr calculation block estimates the rotor position, which is essential to
transformation blocks (Park, Reverse Park) for performing field orientation, so that the
currents supplied to the machine can be oriented in quadrature to the rotor flux vector.
More in depth information about reference frame theory is available in Section 4.2.8 on
page 54.
●
The space vector PWM block (SVPWM) implements an advanced modulation method
that reduces current harmonics, thus optimizing DC bus exploitation.
●
The current reading block allows you to measure stator currents correctly, using either
shunt resistors or market-available isolated current Hall sensors (ICS).
●
The speed-reading block handles the encoder signals in order to acquire properly rotor
angular velocity or position.
●
The PID-controller block implements a proportional, integral and derivative feedback
controller, to achieve speed, torque and flux regulation.
15/84
Getting started with the library
Figure 5.
2.2
UM0312
PMSM FOC structure
Pre-checks and library configuration
It is quite easy to set up an operational evaluation platform with a drive system that includes
the STR750-MCKIT (featuring the STR750 microcontroller, where this software runs) and a
permanent magnet sensored motor.
This section explains how to quickly configure your system and, if necessary, customize the
library accordingly.
Follow these steps to accomplish this task:
1.
Gather all the information that is needed regarding the hardware in use (motor
parameters, power devices features, speed/position sensor parameters, current
sensors characteristics);
2.
Edit, using an IDE, the 75x_MCconf.h configuration header file (as explained in more
detail in Section 2.2.1), and the following parameter header files,
3.
2.2.1
–
MC_PMSM_motor_param.h (see Section 2.2.2);
–
MC_encoder_param.h (see Section 2.2.3).
–
MC_Control_Param.h (see Section 2.2.4),
Re-build the project and download it on the STR750 microcontroller.
Library configuration file: 75x_MCconf.h file
The purpose of this file is to declare the compiler conditional compilation keys that are used
throughout the entire library compilation process to:
16/84
1.
Select which current measurement technique is actually in use (the choice is between
three-shunt or ICS sensors, according to availability).
2.
Enable or disable the derivative action in the speed controller or in the current
controllers in accordance with expected performance and code size.
UM0312
Getting started with the library
If this header file is not edited appropriately (no choice or undefined choice), you will receive
an error message when building the project. Note that you will not receive an error message
if the configuration described in this header file does not match the hardware that is actually
in use, or in case of wrong wiring.
More specifically:
●
#define ICS_SENSORS
To be uncommented when current sampling is done with isolated current sensors
(commented by default).
●
#define THREE_SHUNT
To be uncommented when current sampling is done with 3 shunt resistors
(uncommented by default).
●
#define ENCODER
To be uncommented when the encoder is connected to the starter kit. Mandatory
(uncommented by default) for the PMSM software library 1.0.
●
#define TACHO
To be uncommented when the tacho signal is connected to the starter kit. Not used
(commented by default) in the PMSM software library.
●
#define Id_Iq_DIFFERENTIAL_TERM_ENABLED
To be uncommented when derivative terms for torque and flux control loop regulation
(PID) are enabled (uncommented by default).
●
#define SPEED_DIFFERENTIAL_TERM_ENABLED
To be uncommented when the derivative term for speed control loop regulation (PID) is
enabled (uncommented by default).
Once these settings have been done, only the required blocks will be linked in the project;
this means that you do not need to exclude any C source files from the build.
Caution:
When using shunt resistors for current measurement, ensure that the REP_RATE parameter
(in MC_Control_Param.h) is set properly (see Section 2.2.4 and Section A.2: Selecting
PWM frequency for 3 shunt resistor configuration on page 80 for details).
2.2.2
Permanent magnet motor parameters: MC_PMSM_motor_param.h file
The MC_PMSM_motor_param.h header file holds motor parameters which are essential to
properly operate the vector drive. It provides the compiler with the number of pole pairs of
the motor, and with the alignment settings (see Figure 6).
The following parameters must be defined in all cases:
●
#define POLE_PAIR_NUM
Specify here the number of pole pairs of your motor. For the SHINANO PM Sensored
motor provided with the starter-kit, the default value is 2.
●
#define T_ALIGNMENT
Define here the time in ms for the rotor alignment.
●
#define I_ALIGNMENT
Define here the maximum current value at the end of the rotor alignment (the value is
hardware dependent).
17/84
Getting started with the library
Figure 6.
UM0312
Alignment procedure
Stator
Current
Reset of
encoder timer
I_ALIGNMENT
0
T_ALIGNMENT
Time (ms)
After the alignment procedure, a reset of the encoder timer is done in order to record the ‘0
degree’ rotor angle reference.
2.2.3
Encoder parameters: MC_ENCODER_param.h file
The purpose of this header file is to provide the compiler with the encoder parameters.
●
#define TIMER0_HANDLES_TACHO
To be uncommented if the encoder outputs are connected to the TIMER0 input.
●
#define TIMER1_HANDLES_TACHO
To be uncommented if the encoder outputs are connected to the TIMER1 input.
●
#define TIMER2_HANDLES_TACHO
To be uncommented if the encoder outputs are connected to the TIMER2 input. (This is
the default setting when using the STR750-MCKIT).
●
#define ENCODER_PPR
This statement contains the number of pulses per revolution of the motor encoder. For
the SHINANO PM Sensored motor provided with the starter-kit, the default value is
‘400’.
2.2.4
Drive control parameters: MC_Control_Param.h file
The MC_Control_Param.h header file gathers parameters related to:
18/84
●
Maximum modulation index, see page 19
●
Power device control parameters, see page 19
●
Flux and torque PID regulators sampling rate, see page 19
●
Speed regulation loop frequency, see page 19
●
Speed controller setpoint and PID constants, see page 20
●
Torque and flux controller setpoints and PID constants, see page 20
●
Linear variation of PID constants according to mechanical speed, see page 21
UM0312
Getting started with the library
Maximum modulation index
The maximum modulation index for space vector PWM modulation guarantees a maximum
limit to the PWM duty cycle output to the power stage in order to sample the current in the 3
phases correctly. This value depends on both the PWM switching frequency and the time
required to compute the PID control loop for torque and flux regulation.
Only one definition out of the 9 declared must be uncommented. Refer to Section 4.2.9:
Circle limitation on page 56 for explanations on maximum modulation index.
/* DEFINE ONLY ONE max modulation index in the following list */
//#define MAX_MODULATION_100_PER_CENT // 100% max modulation index
//#define MAX_MODULATION_99_PER_CENT // 99% max modulation index
//#define MAX_MODULATION_98_PER_CENT // 98% max modulation index
//#define MAX_MODULATION_97_PER_CENT // 97% max modulation index
#define MAX_MODULATION_96_PER_CENT // 96% max modulation index
//#define MAX_MODULATION_95_PER_CENT // 95% max modulation index
//#define MAX_MODULATION_94_PER_CENT // 94% max modulation index
//#define MAX_MODULATION_93_PER_CENT // 93% max modulation index
//#define MAX_MODULATION_92_PER_CENT // 92% max modulation index
Power device control parameters
●
#define PWM_FREQ
PWM switching frequency. The value must be expressed in Hz (default 14000, 14Khz).
●
#define DEADTIME_NS
Define here, in ns, the dead time, in order to avoid shoot-through conditions.
Flux and torque PID regulators sampling rate
#define REP_RATE
Value to be fed into the repetition counter of the synchronizable PWM timer peripheral. The
value (default 1) is 8-bit long, and provides the period frequency for current sampling and
regulation. For more information, refer to the STR750 Datasheet Synchronizable Standard
Timer, Repetition Counter Register section.
Flux and torque PIDs sampling rate =
2 ⋅ PWM _ FREQ
REP _ RATE + 1
In fact, because there is no reason for either executing the PMSM FOC algorithm without
updating the stator currents values or for performing stator current conversions without
running the PMSM FOC algorithm, in the proposed implementation the stator current
sampling frequency and the PMSM FOC algorithm execution rate coincide.
Note:
REP_RATE must be an odd number if currents are measured by shunt resistors (see
Section A.2: Selecting PWM frequency for 3 shunt resistor configuration on page 80 for
details); its value is 8-bit long;
Speed regulation loop frequency
#define PID_SPEED_SAMPLING_TIME
Sampling time for the PID speed control loop. This value is 8-bit long, and the sampling
period is adjustable from 0 (500ms) to 255 (127ms). The default sampling time is 2ms.
19/84
Getting started with the library
UM0312
Speed controller setpoint and PID constants (initial values)
●
#define PID_SPEED_REFERENCE
Mechanical speed reference in closed loop at start up. This is a signed 16-bit value,
expressed with 0.1Hz resolution (‘150’ means 15Hz which is the default value). The
sign gives the direction of the motor rotation.
●
#define PID_SPEED_KP_DEFAULT
Proportional coefficient gain for the speed control loop regulation. This is a signed 16bit value, adjustable from 0 to 32767 (default 5400).
●
#define PID_SPEED_KI_DEFAULT
Integral coefficient gain for the speed control loop regulation. This is a signed 16-bit
value, adjustable from 0 to 32767 (default 2000).
●
#define PID_SPEED_KD_DEFAULT
Derivative coefficient gain for the speed control loop regulation. This is a signed 16-bit
value, adjustable from 0 to 32767 (default 7400).
Torque and flux controller setpoints and PID constants:
●
#define PID_TORQUE_REFERENCE
Torque reference value in open loop at start up. This is a signed 16-bit value (default
2500). The sign gives the direction of rotation of the motor. In closed loop, this value is
computed automatically by the speed regulation loop.
●
#define PID_TORQUE_KP_DEFAULT
Proportional coefficient gain for the torque control loop regulation. This is a signed 16bit value, adjustable from 0 to 32767 (default 15000).
●
#define PID_TORQUE_KI_DEFAULT
Integral coefficient gain for the torque control loop regulation. This is a signed 16-bit
value, adjustable from 0 to 32767 (default 1000).
●
#define PID_TORQUE_KD_DEFAULT
Derivative coefficient gain for the torque control loop regulation. This is a signed 16-bit
value, adjustable from 0 to 32767 (default 1400).
●
#define PID_FLUX_REFERENCE
Flux reference value. This is a signed 16 bits value (default 0). The modification of flux
reference can help to increase the maximum speed of the motor, while the efficiency
will be slightly decreased.
●
#define PID_FLUX_KP_DEFAULT
Proportional coefficient gain for the flux control loop regulation. This is a signed 16-bit
value, adjustable from 0 to 32767 (default 10000).
●
#define PID_FLUX_KI_DEFAULT
Integral coefficient gain for the flux control loop regulation. This is a signed 16-bit value,
adjustable from 0 to 32767 (default 1200).
●
#define PID_FLUX_KD_DEFAULT
Derivative coefficient gain for the flux control loop regulation. This is a signed 16-bit
value, adjustable from 0 to 32767 (default 1000).
20/84
UM0312
Getting started with the library
Linear variation of PID constants according to mechanical speed
When the linear coefficient computation is enabled in speed closed loop (see Figure 40 on
page 73), the following set-points must be fed with appropriate values (coefficient
computation is disabled by default in the library). Refer to Section 5.2.2: Adjusting the speed
regulation loop Ki, Kp and Kd vs the motor frequency on page 72.
●
#define Freq_Min
Linear curve for speed control loop, minimum frequency, set-point number 1.
●
#define Ki_Fmin
Linear curve for speed control loop, integral coefficient gain, set-point number 1.
●
#define Kp_Fmin
Linear curve for speed control loop, proportional coefficient gain, set-point number 1.
●
#define Kd_Fmin
Linear curve for speed control loop, derivative coefficient gain, set-point number 1.
●
#define F_1
Linear curve for speed control loop, intermediate frequency, set-point number 2.
●
#define Ki_F_1
Linear curve for speed control loop, integral coefficient gain, set-point number 2.
●
#define Kp_F_1
Linear curve for speed control loop, proportional coefficient gain, set-point number 2.
●
#define Kd_F_1
Linear curve for speed control loop, derivative coefficient gain, set-point number 2.
●
#define F_2
Linear curve for speed control loop, intermediate frequency, set-point number 3.
●
#define Ki_F_2
Linear curve for speed control loop, integral coefficient gain, set-point number 3.
●
#define Kp_F_2
Linear curve for speed control loop, proportional coefficient gain, set-point number 3.
●
#define Kd_F_2
Linear curve for speed control loop, derivative coefficient gain, set-point number 3.
●
#define Freq_Max
Linear curve for speed control loop, maximum frequency, set-point number 4.
●
#define Ki_Fmax
Linear curve for speed control loop, integral coefficient gain, set-point number 4.
●
#define Kp_Fmax
Linear curve for speed control loop, proportional coefficient gain, set-point number 4.
●
#define Kd_Fmax
Linear curve for speed control loop, derivative coefficient gain, set-point number 4.
21/84
Getting started with the library
2.3
UM0312
Running your own motor
As a starting point, the open loop mode should be used for the first trials (fixed speed Ki, Kp
and Kd coefficients are applied). Low-current alignment values should be used also and
then increased smoothly step by step. Sufficient alignment time should be applied in order to
avoid any oscillations while resetting the encoder timer at the end of the ramp (see
I_ALIGNMENT and T_ALIGNMENT settings in Section 2.2.2: Permanent magnet motor
parameters: MC_PMSM_motor_param.h file on page 17).
2.4
Closed loop operation and PID settings
To run a motor in standalone closed loop, the first step should be to run the system with
fixed PID speed parameters and modify them while the motor is running in order to define a
working range (linear coefficient computation disabled, see Disabling the linear curve
computation routine, 75x_it.c module on page 73).
The second step is, for a given target mechanical speed, to fine-tune all the PID speed
parameters most adequate for this speed. For each target speed, these values should be
recorded in the form of a table, which will be used by the STR750 standalone firmware.
You should collect data for 4 speeds: the min and max speeds, and 2 intermediate speeds
of your choice. The STR750 firmware will then make a linear extrapolation of these
parameters between the 4 specified speeds to ensure smooth operation (linear coefficient
computation enabled, see Figure 40 on page 73).
2.5
How to define and add a module
This section explains how you can create your own library modules to enhance the
functionalities offered by the PMSM software library.
1.
Create a new file.
You can either copy and paste an existing file and rename it, or in the File menu,
choose New, then click the File icon and save it in the right format (*.c, *.h
extension), as shown in Figure 7.
22/84
UM0312
Getting started with the library
Figure 7.
2.
Creating a new file
Declare the new file containing your code in the toolchain workspace.
To do this, simply right-click in the workspace folder, then choose the Add Files submenu. The new file is automatically added to the workspace and taken into account for
the compilation of the whole project.
The procedure of adding the module to the project is very easy with the IAR Embedded
Workbench, as the makefile and linking command files are automatically generated. When
rebuilding the library, the configuration files are updated accordingly.
Figure 8.
Adding a file to the workspace
23/84
Running the demo program
3
UM0312
Running the demo program
This section assumes that you are using the STR750-MCKITmotor control starter kit.
The demo program is intended to provide examples on how to use the software library
functions; it includes both open speed loop and closed speed loop operations (hereafter
simply referred to as Open Loop and Closed Loop), with the possibility of changing different
parameters on the fly.
The default configuration allows the use of three shunt resistors for current reading and
encoder for speed feedback. Refer to Section 3.3 on page 27 for setting up the system when
using ICS.
When the application is started, it first shows a welcome message and switches shortly to
the main screen. Use the joystick and the button labelled KEY to navigate between the
menus.
Key assignments are shown in Figure 9.
Figure 9.
Key function assignments
A simple state machine handles the motor control tasks in the main loop, as well as basic
monitoring of the power stage. This state machine does not differentiate open loop from
closed loop control. It is described in Figure 10.
The power stage is monitored using the ADC peripheral and the PWM peripheral
Emergency Stop (ES) input to watch the following conditions:
●
Heatsink over-temperature (ADC channel AIN6 and ES input),
●
DC bus over/under-voltage (on ADC channel AIN7),
●
Over-current protection (ES input).
Any of these three conditions will cause the PWM to be stopped and the state machine to go
into FAULT state before coming back to IDLE state. Depending on the source of the fault, an
error message is also displayed on the LCD during FAULT state.
24/84
UM0312
Running the demo program
Figure 10. Main.c state machine
Idle
Button
pushed
Fault condition
over
Start
HW or
start-up fault
1sec delay
elapsed
Fault
Wait
HW fault
Start OK
Run
Button
pushed
Button
pushed
Button
pushed
Stop
3.1
LCD display in OPEN loop mode
The following sections provide a summary of the screen access and settings in open loop;
blinking items are shown underlined.
Open
Ref ----Hz
Speed= 0000.0 Hz
Motor stopped: Open/closed loop selection
Motor running: no access
Switching from open to closed loop operation and vice versa is done by moving the joystick
up or down while the first menu shown in the above figure is displayed and the motor is
stopped. Moving the joystick left or right in these circumstances allows changing the context
into the second menu where it is possible to modify both the torque and flux reference.
Iq 02000
Id 00000
00000
00000
PID torque regulator target selection
Measured torque (top right) and flux (bottom
right)
Iq 02000
Id 00000
00000
00000
PID flux regulator target selection
25/84
Running the demo program
UM0312
Finally press either the KEY button or the joystick to start the motor (main state machine will
move from IDLE to START state).
The ramp up strategy is illustrated in Figure 6: Alignment procedure on page 18. Basically,
the applied stator current reference reaches the I_ALIGNMENT value that is defined in
‘MC_Control_Param.h’ following a linear ramp. After a programmed delay (T_ALIGNMENT),
the torque and flux references become adjustable on the fly from the joystick.
3.2
LCD display in CLOSED loop mode
The following sections provide a summary of the screen access and settings in closed loop;
blinking items are shown underlined.
Closed Ref 0015Hz
Speed= 0000.0 Hz
Motor stopped: Open/closed loop selection
Motor running: no access
Switching from open to closed loop operation and back is done by moving the joystick up or
down while the first menu shown in the above figure is displayed and the motor is stopped.
Closed Ref 0015Hz
Speed= 0000.0 Hz
PID motor mechanical speed target selection
In closed loop operation, you can vary the target speed by moving the joystick up or down
while the PID motor speed target selection menu is displayed.
The demo program also allows real-time tuning of the speed PID regulator coefficients:
S 0000.0 Ki=02000
Kp=05400 Kd=07400
PID motor speed integral gain (Ki) selection
Current mechanical speed in Hz
S 0000.0 Ki=02000
Kp=05400 Kd=07400
PID motor speed proportional gain (Kp) selection
S 0000.0 Ki=02000
Kp=05400 Kd=07400
PID motor speed derivative gain (Kd) selection
Iq 02000
Id 00000
26/84
00000
00000
PID flux regulator target selection (torque is
automatically adjusted by the speed PID)
Measured torque (top right) and flux (bottom
right) are displayed
UM0312
Running the demo program
In closed loop, only the torque reference is the output of the speed PID regulator. Although
you cannot act directly on the torque reference, you can set the flux reference and also
observe both the measured flux and torque components; varying the flux reference can help
to increase the motor speed while the system efficiency decreases (also known as field
weakening).
As in open loop, pressing the joystick or the KEY button will start the motor.
The speed PID regulator is enabled and takes control of the torque reference right after the
linear ramp-up alignment process as shown in Figure 11.
Figure 11. Closed loop start-up strategy
Stator
Current
Closed loop
enabled
Alignment
I_ALIGNMENT
PI(D) current
reference
0
3.3
T_ALIGNMENT
Time (ms)
Setting up the system when using ICS sensors
The default configuration provides for the use of three-shunt resistors. Section 3.3.1
describes how to change the firmware configuration from three-shunt resistors to two ICS
stator current reading. This section gives you information about how to provide the STR750
with ICS feedback signals and to customize the firmware to use a different hardware.
Caution:
When using two ICS for stator current reading, you must ensure that the sensors output
voltage range is compatible with the STR750 supply voltage.
3.3.1
Connecting the two ICS sensors to the motor and to STR750
In order for the implemented PMSM FOC algorithm to work properly, it is necessary to
ensure that the software implementation of the 75x_svpwm_ICS module and the hardware
connections of the two ICS are consistent.
As illustrated in Figure 12, the two ICS must act as transducers on motor phase currents
coming out of the inverter legs driven by STR750 PWM signals PWM1 (Phase A) and
PWM2 (Phase B). In particular, the current coming out of inverter Phase A must be read by
an ICS whose output has to be sent to the analog channel specified by the
PHASE_A_CHANNEL parameter in MC_pwm_ics_prm.h. Likewise, the current coming out
27/84
Running the demo program
UM0312
of inverter Phase B must be read by the other ICS and its output has to be sent to the
analog channel specified by the PHASE_B_CHANNEL parameter in MC_pwm_ics_prm.h.
About the positive current direction convention, a positive half-wave on
PHASE_X_CHANNEL is expected, corresponding to a positive half-wave on the current
coming out of the related inverter leg (see direction of I in Figure 12).
Figure 12. ICS hardware connections
3.3.2
Selecting PHASE_A_CHANNEL and PHASE_B_CHANNEL
Default settings for PHASE_A_CHANNEL and PHASE_B_CHANNEL are respectively
ADC_CHANNEL11 and ADC_CHANNEL10. You can change the default settings if the
hardware requires it by editing the MC_pwm_ics_prm.h file. However, there are a few rules
to follow when selecting the new ADC channels:
●
You must initialize the proper GPIOs as analog inputs; an example for channel 8 is
given below:
/* ADC Channel 8 pin configuration */
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_29;
GPIO_Init(GPIO0, &GPIO_InitStructure);
●
28/84
You must select two contiguous channels (for example, ADC_CHANNEL8 and
ADC_CHANNEL9) and the one with the highest number must be associated with
PHASE_A_CHANNEL (for example, PHASE_A_CHANNEL -> ADC_CHANNEL9,
PHASE_B_CHANNEL->ADC_CHANNEL8)
UM0312
3.4
Running the demo program
Managing the incremental encoder
Quadrature incremental encoders are widely used to read the rotor position of electric
machines.
As the name implies, incremental encoders actually read angular displacements with
respect to an initial position: if that position is known, then rotor absolute angle is known too.
Quadrature encoders have two output signals (represented in Figure 13 as TI1 and TI2).
With these, and with the STR750 standard timer in encoder interface mode, it is possible to
get information about rolling direction.
Figure 13. Encoder output signals: counter operation
In addition, rotor angular velocity can be easily calculated as a time derivative of angular
position.
To set up the PMSM software library for use with an incremental encoder, simply modify the
MC_encoder_param.h header files according to the indications given in Section 2.2.3 on
page 18.
However, some extra care should be taken, concerning what is considered to be the positive
rolling direction. Because of this, and because of how the encoder output signals are wired
to the microcontroller input pins, it is possible to have a sign discrepancy between the real
rolling direction and the direction that is read. To avoid this kind of reading error, you can
apply the following procedure:
1.
You can correct it by simply swapping and rewiring the encoder output signals.
2.
If this isn’t practical, you can modify a software setting instead: in the 75x_encoder.c
file, replace the code line:
TIM_InitStructure.TIM_IC1Polarity = TIM_IC1Polarity_Rising;
with:
TIM_InitStructure.TIM_IC1Polarity = TIM_IC1Polarity_Falling;
29/84
Running the demo program
3.5
UM0312
Fault messages
This section provides a list of possible fault message that can be displayed on the LCD
when using the software library together with the STR750MC-KIT:
●
“Over Current”
An Emergency Stop was detected on the PWM peripheral dedicated pin. If using
STR750-MCKIT it could mean that either the hardware over temperature protection or
the hardware over current protection were triggered. Refer to the STR750-MCKIT User
Manual for details,
●
“Over Heating”
An over temperature was detected on the dedicated analog channel; the digital
threshold NTC_THRESHOLD and the relative hysteresis (NTC_HYSTERESIS) are
specified in the MC_Misc.c source file. Refer to the STR750-MCKIT User Manual for
details.
●
“Bus Over Voltage”
An over voltage was detected on the dedicated analog channel. The digital threshold
(OVERVOLTAGE_THRESHOLD) is specified in the MC_Misc.c source file. Refer to the
STR750-MCKIT User Manual for details.
●
"Bus Under Voltage"
The bus voltage is below 20V DC. The threshold is specified in the MC_Misc.c source
file (UNDERVOLTAGE_THRESHOLD parameter). The corresponding FAULT flag is not
cleared by firmware, therefore the STR750 must be reset after the bus voltage has
been switched on.
3.6
Note on debugging tools
The third party JTAG interface should always be isolated from the application using the
MB535 JTAG opto-isolation board; it provides protection for both the JTAG interface and the
PC connected to it.
Caution:
During a breakpoint, when using the JTAG interface for the firmware development, the motor
control cell clock circuitry should always be enabled; if disabled, a permanent DC current
may flow in the motor because the PWM outputs are enabled, which could cause
permanent damage to the power stage and/or motor. A dedicated bit in the PWM_CR control
register, the DBGC bit must be set to 1 (see Figure 14).
Figure 14. DBGC bit in PWM control register (from STR750 reference manual)
Control Register (PWM_CR)
Address Offset: 00h
Reset value: 0000h
30/84
UM0312
Motor control library routines
4
Motor control library routines
4.1
Library reference
Functions are described in the format given below:
Synopsis
Lists the referenced include files and prototype declarations.
Description
Describes the functions specifically with a brief explanation of how
they are executed.
Input
Gives the format and units.
Returns
Gives the value returned by the function, including when an input
value is out of range or an error code is returned.
Note
Indicates the limits of the function or specific requirements that
must be taken into account before implementation.
Caution
Indicates important points that must be taken into account to
prevent hardware failures.
Functions called
Lists called functions. Useful to prevent conflicts due to the
simultaneous use of resources.
Code example
Indicates the proper way to use the function, and if there are
certain prerequisites (interrupt enabled, etc.).
Some of these sections may not be included if not applicable for example, no parameters or
obvious use.
4.2
Motor control software layer
The software related to motor control is part of several modules. These modules provide:
4.2.1
●
Basic setup
●
Control routines
●
Related interrupt handling routines
●
Current sampling for torque and flux regulation
●
Speed acquisition for closed loop operation
75x_svpwm_3shunt module
Two important tasks are performed in the 75x_svpwm_3shunt module:
●
Space vector pulse width modulation (SVPWM)
●
Three shunt resistor topology current reading
In order to reconstruct the currents flowing through a three-phase load with the required
accuracy using three shunt resistors, it is necessary to properly synchronize A/D
conversions with the generated PWM signals.
31/84
Motor control library routines
UM0312
SVPWM_3ShuntInit
Synopsis
void SVPWM_3ShuntInit(void);
Description
The purpose of this function is to set-up microcontroller peripherals for
performing 3 shunt resistors topology current reading and center aligned
PWM generation.
The function initializes the DMA, EIC, ADC, GPIO, PWM, and TIM0
peripherals.
In particular, the DMA, ADC, PWM and TIM0 peripherals are configured
to perform two synchronized A/D conversions per PWM switching
period.
Input
None
Returns
None
Caution
It must be called at main level
Functions
called
Standard Library:
MRCC_PeripheralClockConfig, GPIO_Init, EIC_IRQInit, EIC_IRQCmd,
DMA_Init, DMA_Cmd, TIM_DMAConfig, DMA_DeInit, ADC_DMACmd,
PWM_DeInit, PWM_StructInit, PWM_Init, PWM_TRGOSelection,
PWM_ClearFlag, PWM_ITConfig, PWM_ResetCounter,
ADC_StructInit, ADC_Init, ADC_Cmd, ADC_StartCalibration,
ADC_ConversionCmd, TIM_Init, TIM_SynchroConfig,
TIM_ResetCounter, PWM_Cmd.
Motor Control Library:
SVPWM_3ShuntCurrentReadingCalibration
32/84
UM0312
Motor control library routines
SVPWM_3ShuntCurrentReadingCalibration
Synopsis
void SVPWM_3ShuntCurrentReadingCalibration(void);
Description
The purpose of this function is to store the three analog voltages
corresponding to zero current values for compensating the offset
introduced by the amplification network.
Input
None
Returns
None
Caution
This function must be called before PWM outputs are enabled so that
the current flowing through inverter legs is zero. When using STR750
MC Kit, the power board (MB459B) must be supplied before the
control board (MB469B). This way, the current sensing conditioning
network will reach steady state before performing calibration.
Functions called
Standard Library:
ADC_GetFlagStatus, ADC_ConversionCmd, ADC_Init,
ADC_ClearFlag, ADC_ITConfig
Motor Control Library:
SVPWM_3ShuntCalcDutyCycles
SVPWM_3ShuntGetPhaseCurrentValues
Synopsis
Curr_Components SVPWM_3ShuntGetPhaseCurrentValues(void);
Description
This function computes current values of Phase A and Phase B in q15
format starting from values acquired from the A/D Converter
peripheral.
Input
None
Returns
Curr_Components type variable
Caution
In order to have a q15 format for the current values, the digital value
corresponding to the offset must be subtracted. Thus, it must be called
after SVPWM_3ShuntCurrentReadingCalibration
Functions called None
33/84
Motor control library routines
UM0312
SVPWM_3ShuntCalcDutyCycles
Synopsis
void SVPWM_3ShuntCalcDutyCycles (Volt_Components
Stat_Volt_Input);
Description
After execution of the PMSM FOC algorithm, new stator voltages
component Vα and Vβ are computed. The purpose of this function is to
calculate exactly the three duty cycles to be applied to motor phases
starting from the value of those voltage components.
Moreover, once the three duty cycles to be applied in next PWM period
are known, this function sets the DMA, ADC and TIM0 peripherals for
the next current reading. In particular, depending on the duty cycle
values, the delay for the two current samplings are computed (see
Section 4.2.4 on page 39).
Refer to Section 4.2.2 for information on the theoretical approach of
SVPWM.
Input
Vα and Vβ
Returns
None
Caution
None
Functions called None
SVPWM_3ShuntGPADCConfig
Synopsis
void SVPWM_3ShuntGPADCConfig(void);
Description
The purpose of this function is to configure the A/D converter for
general purpose conversions after conversions for current reading
have been performed. In particular, this function starts a chain of
regular conversions whose first channel is
GP_CONVERSIONS_FIRST_CHANNEL (defined in
‘MC_pwm_3shunt_prm.h’). In addition, the number of channels to be
converted is set equal to GP_CONVERSIONS_NUMBER (defined in
‘MC_pwm_3shunt_prm.h’).
Input
None
Returns
None
Caution
As mentioned in Section 4.2.2, the overall duration of the regular chain
conversion must be lower than the duration of the PMSM FOC routines
(Clarke, Park, Reverse Park and SVPWM generation).
Functions called None
34/84
UM0312
4.2.2
Motor control library routines
Space vector PWM implementation
Figure 15 shows the stator voltage components Vα and Vβ while Figure 16 illustrates the
corresponding PWM for each of the six space vector sectors.
Figure 15. Vα and Vβ stator voltage components
Figure 16. SVPWM phase voltage waveforms
35/84
Motor control library routines
UM0312
With the following definitions for:
U α = 3 ∗ T ∗ Valfa
U β = T ∗ Vbeta
and
X =Uβ
Y=
Z=
Uα + U β
2
U β − Uα
2
literature demonstrates that the space vector sector is identified by the conditions shown in
Table 2.
Table 2.
Sector identification
Y<0
Z<0
Sector
V
Y>=0
Z>=0
Z<0
Z>=0
X<=0
X<0
X<=0
X>0
IV
III
VI
I
II
The duration of the positive pulse widths for the PWM applied on Phase A, B and C are
respectively computed by the following relationships:
Sector I, IV:
T + X −Z
2
tB = tA + Z
tC = t B − X
tA =
Sector II, V:
T +Y − Z
2
tB = tA + Z
tC = t A − Y
tA =
36/84
UM0312
Motor control library routines
Sector III, VI:
T − X +Y
2
t B = tC + X
tC = t A − Y
tA =
Where T is the PWM period.
Now, considering that the PWM pattern is center aligned and that the phase voltages must
be centered to 50% of duty cycle, it follows that the values to be loaded into the PWM output
compare registers are given respectively by:
Sector I, IV:
T T /2+ X −Z
+
4
2
TimePhB = TimePhA + Z
TimePhC = TimePhB − X
TimePhA =
Sector II, V:
T T /2+Y − Z
+
4
2
TimePhB = TimePhA + Z
TimePhC = TimePhA − Y
TimePhA =
Sector III, VI:
T T /2− X +Y
+
4
2
hTimePhB = TimePhC + X
TimePhC = TimePhA − Y
TimePhA =
4.2.3
Current sampling in three shunt topology and general purpose A/D
conversions
The three currents I1, I2, and I3 flowing through a three-phase system follow the
mathematical relation:
I1+I2+I3=0
For this reason, to reconstruct the currents flowing through a generic three-phase load, it is
sufficient to sample only two out of the three currents while the third one can be computed
by using the above relation.
The flexibility of the STR750 A/D converter trigger, makes it possible to synchronize the two
A/D conversions needed for reconstructing the current flowing through the three-phase AC
induction motor at any given time along the PWM period. To do this, the control algorithm
must have a full control of the A/D converter peripheral.
37/84
Motor control library routines
UM0312
Furthermore, you have the possibility to add any A/D conversions required for your
application (hereafter referred to as general purpose conversions). This section describes
how this is achieved.
First of all, the SVPWM_3ShuntInit function performs the synchronization between PWM
and TIM0 peripherals (Figure 17 shows the two peripheral counters when REP_RATE = 1),
then, the A/D converter peripheral is configured so that it is triggered by the TIM0 OC2
signal.
Figure 17. PWM and TIM0 synchronization (REP_RATE=1)
This way, when the value of the TIM0 counter matches the value contained in the OCR2
register, the first A/D conversion for current sampling is started.
Meanwhile, a DMA transaction reloads the TIM0 OCR2 register with the value
corresponding to the delay required for the second current sampling conversion. Moreover,
the end of this first A/D conversion triggers another DMA transaction which sets the next
channel to be converted in the ADC register CLR2.
At the end of the second conversion, the three-phase load current has been updated and
the PMSM FOC algorithm can then be executed in the A/D End of Conversion Interrupt
Service Routine (EOC ISR). In this routine, the A/D converter is also reconfigured so that it
can perform the general purpose chain of conversions while the CPU executes the PMSM
FOC algorithm.
The entire process is illustrated in Figure 18.
After execution of the PMSM FOC algorithm, the A/D converter is configured to perform the
next PWM period three-phase current sensing (delays and channels). This allows to reduce
the CPU load (lower number of ADC ISR).
To specify the general purpose conversions to be performed, you can select the first channel
and the number of channels to be converted by editing the
GP_CONVERSIONS_FIRST_CHANNEL and GP_CONVERSIONS_NUMBER parameters
respectively in the MC_pwm_3shunt_prm.h header file.
38/84
UM0312
Motor control library routines
Figure 18. Three shunt topology current sampling and GP A/D conversions
integration (REP_RATE=1)
4.2.4
Tuning delay parameters and sampling stator currents in three-shunt
resistor topology
Figure 19 shows one of the three inverter legs with the related shunt resistor.
Figure 19. Inverter leg and shunt resistor position
To indirectly measure the phase current I, it is possible to read the voltage V providing that
the current flows through the shunt resistor R.
It is possible to demonstrate that, whatever the direction of current I, it always flows through
the resistor R if transistor T2 is switched on and T1 is switched off. This implies that in order
to properly reconstruct the current flowing through one of the inverter legs, it is necessary to
properly synchronize the conversion start with the generated PWM signals. This also means
that current reading cannot be performed on a phase where the duty cycle applied to the low
side transistor is either null or very short.
39/84
Motor control library routines
UM0312
Fortunately, as discussed in Section 4.2.3,to reconstruct the currents flowing through a
generic three-phase load, it is sufficient to simultaneously sample only two out of three
currents, the third one being computed from the relation given in Section 4.2.3. Thus,
depending on the space vector sector, the A/D conversion of voltage V will be performed
only on the two phases where the duty cycles applied to the low side switches are the
highest. In particular, by looking at Figure 16, you can deduct that in sectors 1 and 6, the
voltage on the Phase A shunt resistor can be discarded; likewise, in sectors 2 and 3 for
Phase B, and finally in sectors 4 and 5 for Phase C.
Moreover, in order to properly synchronize the two stator current reading A/D conversions, it
is necessary to distinguish between the different situations that can occur depending on
PWM frequency and applied duty cycles.
Note:
The explanations below refer to space vector sector 1. They can be applied in the same
manner to the other sectors.
Case 1: Duty cycle applied to Phase A low side switch is larger than
DT+TN+ 2TS + TH + TDMA
Where:
●
DT is dead time.
●
TN is the duration of the noise induced on the shunt resistor voltage of a phase by the
commutation of a switch belonging to another phase.
●
TS is the sampling time of the STR750 A/D converter. Refer to the STR750 reference
manual for more detailed information.
●
TH is the holding time of the STR750 A/D converter. Refer to the STR750 reference
manual for more detailed information.
●
TDMA is the time required for the DMA to load the value related to the next conversion
delay in TIM0 OCR2 (refer to Section 4.2.3: Current sampling in three shunt topology
and general purpose A/D conversions on page 37 for further details).
This case typically occurs when SVPWM with low (<60%) modulation index is generated
(see Figure 20). The modulation index is the applied phase voltage magnitude expressed as
a percentage of the maximum applicable phase voltage (the duty cycle ranges from 0% to
100%).
Figure 21 offers a reconstruction of the PWM signals applied to low side switches of Phase
A and B in these conditions plus a view of the analog voltages measured on the STR750
A/D converter pins for both Phase B and C (the time base is lower than the PWM period).
40/84
UM0312
Motor control library routines
Figure 20. Low side switches gate signals (low modulation indexes)
Note that these current feedbacks are constant in the view in Figure 21 because it is
assumed that commutations on Phase B and C have occurred out of the visualized time
window.
Moreover, it can be observed that in this case the two stator current sampling conversions
can be performed between the two commutations of the Phase A low side switch, as shown
in Figure 21.
Figure 21. Low side Phase A duty cycle > DT+TN+ 2TS + TH + TDMA
After the commutation of the Phase A low side switch, a blanking window equal to TN is
applied before starting conversion of phase C, then at the end of the first conversion, it is
necessary to wait a TDMA period before starting the phase B conversion.
41/84
Motor control library routines
UM0312
Case 2: DT+TN+TS < Phase A duty cycle < DT+TN+ 2TS + TH + TDMA
In this case, only one of the two conversions can be performed between the two Phase A
low side commutations. The other conversion is then synchronized depending on the
difference of duty cycles between Phase B and A (ΔDutyA-B). In particular if
ΔDutyA-B < DT+TN+TS (as shown in the red circle in Figure 22), the sampling of Phase C
cannot be performed between Phase B low side switching on and Phase A high side
switching off (see Figure 23). Therefore, Phase C current sampling is performed before
Phase B high side commutation.
Figure 22. DT+TN+TS< Low side Phase A duty cycle < DT+TN+2TS+TH+TDMA and
ΔDutyA-B<DT+TN+TS
42/84
UM0312
Motor control library routines
Figure 23. DT+TN+TS < Low side Phase A duty cycle < DT+TN+2TS+TH+TDMA and
ΔDutyA-B<DT+TN+TS
On the contrary, if ΔDutyA-B > DT+TN+TS (as shown in the red circle in Figure 24), Phase C
conversion is performed between Phase B low side switch on and Phase A high side switch
off (see Figure 25).
Figure 24. DT+TN+TS < Low side Phase A duty cycle < DT+TN+2TS+TH+TDMA and
ΔDutyA-B>DT+TN+TS
43/84
Motor control library routines
UM0312
Figure 25. DT+TN+TS < Low side Phase A duty cycle < DT+TN+2TS+TH+TDMA and
ΔDutyA-B>DT+TN+TS
Case 3: Phase A pulse width < DT+TN+TS
In this case, the duty cycle applied to Phase A is so short that no current sampling can be
performed in between the two low side commutations.
Then if the difference of duty cycles between Phase B and A is long enough to allow two A/D
conversions to be performed between Phase B low side switch on and Phase A high side
switch off, the strategy shown in Figure 27 is used.
Figure 26. Low side duty cycle Phase A < DT+TN+TS and ΔDutyA-B >
DT+TN+2TS+TH+TDMA
44/84
UM0312
Motor control library routines
Otherwise, if the difference of duty cycles between Phase B and A is long enough to allow
only one A/D conversion to be performed between Phase B low side switch on and Phase A
high side switch off, the strategy shown in Figure 29 is used.
In Figure 29, TRise represents the time required by the analog voltage on the shunt resistor
of a phase (signal ‘Current feedback of Phase B’) to settle after a commutation of the low
side switch belonging to the same phase.
Figure 27. Low side duty cycle Phase A < DT+TN+TS and
ΔDutyA-B > DT+TN+2TS+TH+TDMA
Figure 28. Figure 31: Low side duty cycle Phase A < DT+TN+TS and
DT+TRise+TS < ΔDutyA-B < DT+TN+2TS+TH+TDMA
45/84
Motor control library routines
UM0312
Figure 29. Low side duty cycle Phase A < DT+TN+TS and
DT+TRise+TS < ΔDutyA-B < DT+TN+2TS+TH+TDMA
Finally, when a high modulation index (> 92%) and high frequency (>11kHz) PWM signal is
generated, it could happen that both Phase A pulse width is lower than DT+TN+TS and that
ΔDutyA-B < DT+TRise+TS. In this case, it is not possible to perform the current reading on
Phase B, (see Figure 30), so the PWM patterns are slightly modified to relapse in the case
shown in Figure 29. Because this PWM pattern modification produces a distortion on the
phase currents, it is better to limit the scope of the modification by limiting the modulation
index depending on the selected PWM frequency.
46/84
●
DT = 0.7µs
●
TN = 2.55µs
●
TS = 1.6µs
●
TH = 2.67µs
●
TDMA = 0.7µs
●
TRise =2.6µs
UM0312
Motor control library routines
Figure 30. Low side duty cycle Phase A < DT+TN+TS and DutyA-B< DT+TRise+TS
The maximum applicable duty cycles are listed in Table 3 as a function of the PWM
frequency.
Table 3.
Note:
PWM frequency vs maximum duty cycle
PWM frequency
Max duty cycle
Max modulation index (MMI)
Up to 11.4kHz
100%
100%
12.2kHz
99.5%
99%
12.9kHz
99%
98%
13.7kHz
98.5%
97%
14.4kHz
98%
96%
15.2kHz
97.5%
95%
16kHz
97%
94%
16.7kHz
96.5%
93%
17.5kHz
96%
92%
The figures above were measured using the MB459 motor control board. This evaluation
platform is designed to support several motor driving topologies (PMSM and AC induction)
and current reading strategies (single and three-shunt resistors). Therefore, the figures
provided in Table 3 should be understood as a starting point and not as a best case.
47/84
Motor control library routines
UM0312
You can further increase the maximum applicable duty when using your own hardware
system by editing the following definitions in the MC_pwm_3shunt_prm.h header file:
#define
#define
#define
#define
#define
4.2.5
HOLD_TIME 0xA0 //2.67usec 1/60MHz units
DMA_TIME 0x2A //0.7usec
SAMPLING_TIME 0x60//1.6usec
TNOISE 0x96//2.55usec
TRISE 0x96 //2.6usec
75x_svpwm_ICS module
Two important tasks are performed in the 75x_svpwm_ICS module:
●
Space vector pulse width modulation (SVPWM),
●
Three-phase current reading when two isolated current sensors (ICS) are used.
In order to reconstruct the currents flowing through a three phase load with the required
accuracy using two ICS’, it is necessary to properly synchronize A/D conversions with the
generated PWM signals.
Two tasks are included in a single software module.
SVPWM_IcsInit
Synopsis
void SVPWM_IcsInit(void);
Description
The purpose of this function is to set-up microcontroller peripherals for
performing ICS reading and center aligned PWM generation.
The function initializes EIC, ADC, GPIO, and PWM peripherals.
In particular ADC and PWM peripherals are configured to perform one
injected chain of two A/D conversions every time PWM registers are
updated (event called U event).
Refer to Section 4.2.6 for further information on A/D conversion
triggering in ICS configuration.
Input
None
Returns
None
Note
It must be called at main level
Functions called Standard Library:
MRCC_PeripheralClockConfig, GPIO_Init, EIC_IRQInit,
EIC_IRQCmd, PWM_DeInit, PWM_StructInit, PWM_Init,
PWM_TRGOSelection, PWM_ClearFlag, PWM_ITConfig,
PWM_ResetCounter, ADC_StructInit, ADC_Init, ADC_Cmd,
ADC_StartCalibration, ADC_ConversionCmd, PWM_Cmd.
Motor Control Library:
SVPWM_IcsCurrentReadingCalibration
48/84
UM0312
Motor control library routines
SVPWM_IcsCurrentReadingCalibration
Synopsis
void SVPWM_IcsCurrentReadingCalibration(void);
Description
The purpose of this function is to store the two analog voltages
corresponding to zero current values for compensating the offset
introduced by both ICS and amplification network.
Input
None
Returns
None
Caution
The function must be called before PWM outputs are enabled so that
current flowing through inverter legs is zero. When using the STR750
MC Kit, ICS sensors must be supplied before the control board
(MB469B). This way, the current sensing conditioning network can
reach steady state before performing calibration.
Functions called Standard Library:
ADC_GetFlagStatus, ADC_ConversionCmd,
ADC_GetConversionValue
SVPWM_IcsGetPhaseCurrentValues
Synopsis
Curr_Components SVPWM_IcsGetPhaseCurrentValues(void);
Description
This function computes current values of Phase A and Phase B in q15
format from the values acquired from the A/D converter.
Input
None
Returns
Curr_Components type variable
Caution
In order to have a q1.15 format for the current values, the digital value
corresponding to the offset must be subtracted when reading phase
current A/D converted values. Thus, the function must be called after
SVPWM_IcsCurrentReadingCalibration.
Functions called None
49/84
Motor control library routines
UM0312
SVPWM_IcsCalcDutyCycles
Synopsis
void SVPWM_IcsCalcDutyCycles (Volt_Components
Stat_Volt_Input);
Description
After execution of the PMSM FOC algorithm, new stator voltages
component Vα and Vβ are computed. The purpose of this function is
to calculate exactly the three duty cycles to be applied to motor
phases from the values of these voltage components.
Refer to Section 4.2.2 for details about the theoretical approach of
SVPWM and its implementation.
4.2.6
Input
Vα and Vβ
Returns
None
Caution
None
Functions called
None
Isolated current sensor topology current sampling and general
purpose (GP) A/D conversions integration
The three currents I1, I2, and I3 flowing through a three-phase system follow the
mathematical relationship:
I1+I2+I3=0
Therefore, to reconstruct the currents flowing through a generic three-phase load, it is
sufficient to sample only two out of the three currents while the third one can be computed
by using the above relationship.
The flexibility of the STR750 A/D converter trigger makes it possible to synchronize the two
A/D conversions necessary for reconstructing the stator currents flowing through the threephase AC induction motor with the PWM registers update whose rate is also adjusted by the
repetition counter. This is important because, as shown in Figure 31, it is precisely during
counter overflow and underflow that the average level of current is equal to the sampled
current. Refer to the STR750 Reference Manual to learn more about A/D conversion
triggering and the repetition counter.
Finally, at the end of the injected chain conversion for current reading, the general purpose
A/D conversions are performed while the CPU executes the PMSM FOC algorithm.
50/84
UM0312
Motor control library routines
Figure 31. Stator currents sampling and GP conversions in ICS configuration
(REP_RATE=1)
4.2.7
MC_Clarke_Park.h module
This module is designed to perform transformations of electric quantities between frames of
reference that rotate at different speeds.
Based on the arbitrary reference frame theory, the module provides three functions, named
after two pioneers of electric machine analysis, E. Clarke and R.H. Park.
These functions implement three variable changes that are required to carry out fieldoriented control (FOC):
●
those required to carry out field oriented control (FOC): Clarke transforms stator
currents to a stationary orthogonal reference frame (named qd frame, see Figure 32);
●
then, from that arrangement, Park transforms currents to a frame that rotates at an
arbitrary speed (which, in PMSM FOC drive, is synchronous with the rotor flux);
●
Reverse Park transformation brings back stator voltages from a rotating qd frame to a
stationary one.
51/84
Motor control library routines
UM0312
Figure 32. Clarke, Park, and Reverse Park transformations
Clarke
Synopsis
Curr_Components Clarke (Curr_Components Curr_Input)
Description
This function transforms stator currents ias and ibs (which are
directed along axes each displaced by 120 degrees) into currents iα
and iβ in a stationary qd reference frame; q,d axes are directed along
paths orthogonal to each other.
See Section 4.2.8 for the details.
52/84
Input
Stator currents ias and ibs (in q1.15 format) as members of the
variable Curr_Input, which is a structure of type Curr_Components.
Returns
Stator currents iα and iβ (in q1.15 format) as members of a structure
of type Curr_Components.
Functions called
mul_q15_q15_q31
UM0312
Motor control library routines
Park
Synopsis
Curr_Components Park (Curr_Components Curr_Input, s16 Theta)
Description
The purpose of this function is to transform stator currents iα and iβ,
which belong to a stationary qd reference frame, to a rotor flux
synchronous reference frame (properly oriented), so as to obtain iqs
and ids.
See Section 4.2.8 for the details.
Input
Stator currents iα and iβ (in q1.15 format) as members of the variable
Curr_Input, which is a structure of type Curr_Components; rotor flux
angle θλr (65536 pulses per revolution).
Returns
Stator currents iqs and ids (in q1.15 format) as members of a structure
of type Curr_Components.
Functions called
mul_q15_q15_q31
Rev_Park
Synopsis
Volt_Components Rev_Park (Volt_Components Volt_Input)
Description
This function transforms stator voltage vq and vd, belonging to a
rotor flux synchronous rotating frame, to a stationary reference
frame, so as to obtain vα and vβ.
See Section 4.2.8 for the details.
Input
Stator voltages vqs and vds (in q1.15 format) as members of the
variable Volt_Input, which is a structure of type Volt_Components.
Returns
Stator voltages vα and vβ (in q1.15 format) as members of a
structure of type Volt_Components.
Caution
None.
Functions called
mul_q15_q15_q31
53/84
Motor control library routines
UM0312
Rev_Park_Circle_Limitation
Synopsis
void RevPark_Circle_Limitation(void)
Description
After the two new values (Vd and Vq) of the stator voltage producing
flux and torque components of the stator current, have been
independently computed by flux and torque PIDs, it is necessary to
saturate the magnitude of the resulting vector, equal to
Vd2 + Vq2
passing before them to the SVPWM block. The purpose of this
routine is to perform the saturation. Refer to Section 4.2.9: Circle
limitation on page 56 for more detailed information
4.2.8
Input
None
Returns
None
Caution
The limitation of the stator voltage vector must be done in
accordance with the PWM frequency as shown in Table 3: PWM
frequency vs maximum duty cycle on page 47.
Functions called
None
Detailed explanation about reference frame transformations
By making a change of variables, that refers stator and rotor quantities to a frame of
reference rotating at any angular velocity, it is possible to reduce the complexity of the
system electrical equations.
This strategy is often referred to as the Reference-Frame theory [1].
Supposing fax, fbx, fcx are three-phase instantaneous quantities directed along axis each
displaced by 120 degrees, where x can be replaced with s or r to treat stator or rotor
quantities (see Figure 33); supposing fqx, fdx, f0x are their transformations, directed along
paths orthogonal to each other; the equations of transformation to a reference frame
(rotating at an arbitrary angular velocity ω) can be expressed as:
f qdox
⎡
⎢cos θ
f
⎛ qx ⎞
⎢
⎜ ⎟ 2⎢
= ⎜ f dx ⎟ = sin θ
⎢
⎜ f ⎟ 3⎢
⎝ 0x ⎠
1
⎢
⎢⎣ 2
2π ⎞⎤
2π ⎞
⎛
⎛
cos⎜θ −
⎟ cos⎜θ +
⎟
3 ⎠⎥⎥⎛ f ⎞
3 ⎠
⎝
⎝
ax
2π ⎞
2π ⎞ ⎥⎜ ⎟
⎛
⎛
sin ⎜θ −
⎟ sin ⎜θ +
⎟ ⎜ f bx ⎟
3 ⎠
3 ⎠ ⎥⎜ ⎟
⎝
⎝
⎥⎝ f cx ⎠
1
1
⎥
2
2
⎥⎦
where θ is the angular displacement of the q-d reference frame at the time of observation,
and θ0 that displacement at t=0 (see Figure 33).
54/84
UM0312
Motor control library routines
Figure 33. Transformation from an abc stationary frame to a qd rotating frame
With Clark’s transformation, stator currents ias and ibs (which are directed along axes each
displaced by 120 degrees) are resolved into currents i and i on a stationary qd reference
frame.
Appropriate substitution into the general equations (given above) yields:
iα = ias
iβ =
ias + 2ibs
3
In Park’s change of variables, stator currents iα and iβ, which belong to a stationary qd
reference frame, are resolved to a rotor flux synchronous reference frame (properly
oriented), so as to obtain iqs and ids.
Consequently, with this choice of reference, ω=ωλr ; thus:
iqs = −iα sin θ + iβ cos θ
ids = ia cos θ + iβ sin θ
On the other hand, reverse Park transformation takes back stator voltage vq and vd,
belonging to a rotor flux synchronous rotating frame, to a stationary reference frame, so as
to obtain vα and vβ:
vα = −vqs sin θ + vds cos θ
vβ = vqs cos θ + vds sin θ
55/84
Motor control library routines
4.2.9
UM0312
Circle limitation
As discussed above, FOC allows to separately control the torque and the flux of a 3-phase
*
*
permanent magnet motor. After the two new values( Vd and Vq ) of the stator voltage
producing flux and torque components of the stator current, have been independently
computedrby flux and torque PIDs, it is necessary to saturate the magnitude of the resulting
vector ( | V * |) before passing them to the SVPWM block.
The saturation boundary is normally given by the value (S16_MAX=32767) which produces
the maximum output voltage magnitude (corresponding to a duty cycle going from 0% to
100%).
Nevertheless, when using three shunt resistor configuration and depending on PWM
frequency, it might be necessary to limit the maximum PWM duty cycle to guarantee the
proper functioning of the stator currents reading block.
For this reason, the saturation boundary could be a value slightly lower than S16_MAX
depending on PWM switching frequency when using three shunt resistor configuration.
Table 3 on page 47, repeated below for convenience, shows the maximum applicable
modulation index as a function of PWM switching frequency when using the STR750MCKIT.
Note:
PWM frequency
Max duty cycle
Max modulation index (MMI)
Up to 11.4kHz
100%
100%
12.2kHz
99.5%
99%
12.9kHz
99%
98%
13.7kHz
98.5%
97%
14.4kHz
98%
96%
15.2kHz
97.5%
95%
16kHz
97%
94%
16.7kHz
96.5%
93%
17.5kHz
96%
92%
The figures above were measured using the MB459 board. This evaluation platform is
designed to support several motor driving topologies (PMSM and AC induction) and current
reading strategies (single and three-shunt resistors). Therefore, the figures provided in
should be understood as a starting point and not as a best case.
The RevPark_Circle_Limitation function performs the discussed stator voltage
components saturation, as illustrated in Figure 34.
56/84
UM0312
Motor control library routines
Figure 34. Circle limitation working principle
Vd and Vq represent the saturated stator voltage component to be passed to the SVPWM
block. From geometrical considerations, it is possible to draw the following relationship:
Vd* ⋅ MMI ⋅ S16_MAX
r
Vd =
| V* |
Vq =
Vq* ⋅ MMI ⋅ S16_MAX
r
| V* |
In order to speed up the computation of the above equations while keeping an adequate
resolution, the value
MMI ⋅ S16_MAX 2
r
| V* |
r*
is computed and stored in a look-up table for different values of | V | . Furthermore,
considering that MMI depends on the selected PWM frequency, a look-up table is stored in
MC_Clarke_Park.h (with MMI ranging from 92 to 100%).
Once you have selected the required PWM switching frequency, you should uncomment the
Max Modulation Index definition corresponding to the selected PWM frequency, as shown in
Chapter 2.2.4: Drive control parameters: MC_Control_Param.h file on page 18.
For information on selecting the PWM switching frequency, you will find advice in
Section A.2 on page 80. To determine the max modulation index corresponding to the PWM
switching frequency, refer to Table 3 on page 47.
The following section provides an example of how the limitation is performed by the
firmware.
57/84
Motor control library routines
UM0312
Example: max modulation index of 95%.
For a MMI of 95%, the Max module value is 95%*S16_MAX = 31128 (as per the
MAX_MODULE value stored in MC_Clarke_Park.h).
The Figure 35 shows the firmware implementation working principle, minimizing the CPU
load (look-up table access and shift operation for division). The table
circle_limit_table[...] stores a maximum of 81 values (generated from the
circle limitation.xls file located in the Design tools folder). Access is as follows:
Figure 35. Example with Iq = 32000, Id = -5000
2
2
Module 2 = Iq 2 + Id 2 greater than ( MaxModule ) = 31128
Module 2/ (512 x 32768) = 62
Iq = Iq x circle_limit_table[62 - START_INDEX] / 32768
Id = Id x circle_limit_table[62 - START_INDEX] / 32768
Defined in MC_Clarke_Park.h
Return new Iq and Id values
Note that the actual maximum PWM duty cycle is equal to:
Max duty cycle = 100% - (100% - maximum modulation index chosen) / 2
A 95% modulation index corresponds to a 100 - (100-95) / 2 = 97.5% maximum duty cycle
output signals to the power stage.
58/84
UM0312
4.2.10
Motor control library routines
75x_encoder.c module
ENC_Init
Synopsis
void ENC_Init(void)
Description
The purpose of this function is to initialize the encoder timer. The
peripheral clock, input pins and update interrupt are enabled. The
peripheral is configured in 4X mode, which means that the counter
is incremented/decremented on the rising/falling edges of both
timer input 1 and 2 (TIMx_TI0 and TIMx_TI1 pins).
Functions called
MRCC_PeripheralClockConfig
GPIO_Init
EIC_IRQInit
TIM_StructInit, TIM_Init, TIM_ClearFlag, TIM_ITConfig,
TIM_ResetCounter, Tim_Cmd
See also
STR750 datasheet: synchronizable standard timer.
ENC_GetPosition
Synopsis
u32 ENC_GetPosition(void)
Description
This function returns the encoder timer value, giving a direct
reading of the rotor position from 0 to 4*(number of encoder pulses
per revolution). For the SHINANO motor included with the starter
kit, the encoder delivers 400 pulses per revolution. This routine
returns: 0 for 0 degrees, 4*400/2=800 for 180 degrees.
Input
None
Output
Unsigned 32 bits
Functions called
None
See also
STR750 datasheet: synchronizable standard timer.
ENC_Get_Electrical_Angle
Synopsis
s16 ENC_Get_Electrical_Angle(void)
Description
This function returns the electrical angle in signed 16-bit format.
This routine returns: 0 for 0 degrees, -32768 (S16_MIN) for -180
degrees, +32767 (S16_MAX) for +180 degrees.
Input
None
Output
Signed 16 bits
Functions called
None
59/84
Motor control library routines
UM0312
ENC_Get_Mechanical_Angle
Synopsis
s16 ENC_Get_Electrical_Angle(void)
Description
This function returns the mechanical angle in signed 16-bit format.
This routine returns: 0 for 0 degrees, -32768 (S16_MIN) for -180
degrees, +32767 (S16_MAX) for +180 degrees.
Input
None
Output
Signed 16 bits
Functions called None
Caution
Link between Electrical/Mechanical frequency/RPM
Electrical frequency = number of pair poles x mechanical frequency
RPM speed = 60 x Mechanical frequency (RPM: revolutions per
minute)
example: electrical frequency = 100 Hz, motor with 8 pair poles:
100Hz electrical <-> 100/8 =12.5Hz mechanical <-> 12.5 x 60=750
RPM
ENC_ResetEncoder
Synopsis
void ENC_resetEncoder(void)
Description
This function resets the encoder timer (hardware register) value to
zero.
Functions called
TIM_ResetCounter
See also
STR750 datasheet: synchronizable standard timer.
ENC_Clear_Speed_Buffer
60/84
Synopsis
void ENC_Clear_Speed_Buffer(void)
Description
This function resets the buffer used for speed averaging.
Functions called
None
UM0312
Motor control library routines
ENC_Get_Speed
Synopsis
s16 ENC_Get_Speed(void)
Description
This function returns the rotor speed in Hz. The value returned is
given with 0.1Hz resolution, which means that 1234 is equal to
123.4 Hz.
Input
None
Output
Signed 16 bits
Functions called
None
Caution
This routine returns the mechanical frequency of the rotor. To find
the electrical speed, use the following conversion:
electrical frequency = number of pole pairs * mechanical frequency
ENC_Get_Average_Speed
Synopsis
s16 ENC_Get_Average_Speed(void)
Description
This function returns the average rotor speed in Hz. The value
returned is given with 0.1Hz resolution, which means that 1234 is
equal to 123.4 Hz.
Input
None
Output
Signed 16 bits
Functions called
ENC_Get_Speed()
Note
The averaging is done with the values stored in ‘Speed_Buffer[]’.
The size of this buffer is set through the ‘SPEED_BUFFER_SIZE’
statement, which must be equal to a power of 2 to allow the use of
the shift operation for divisions.
Caution
This routine returns the mechanical frequency of the rotor. To find
the electrical speed, use the following conversion:
electrical frequency = mechanical frequency * number of pole pairs
TIMx_UP_IRQHandler - interrupt routine
Synopsis
void TIMx_UP_IRQHandler(void)
Description
This is the encoder timer (TIMER 0, 1 or 2) update routine. An
interruption is generated whenever an overflow/underflow of the
counter value occurs (TIM_CNT). The ‘Encoder_Timer_Overflow’
variable is then incremented.
Functions called
None
Caution
This is an interrupt routine.
See also
STR750 Datasheet: Synchronizable Standard Timer.
61/84
Motor control library routines
4.2.11
UM0312
75x_TBTimer.c module
TB_Timebase_Timer_Init
Synopsis
void TB_Timebase_Timer_Init(void)
Description
The purpose of this function is to initialize the Timebase Timer. The
peripheral clock, interrupt, auto-reload value and counter mode are
set up. The peripheral is configured to generate an interruption every
500µs, thus providing a general purpose timebase.
Functions called EIC_IRQInit
TB_StructInit, TB_Init, TB_ITConfig, TB_Cmd, TB_ResetCounter
TB_ResetCounter
See also
STR750 datasheet: timebase timer.
TB_Wait
Synopsis
void TB_Wait(u16 time)
Description
This function produces a programmable delay equal to the time
variable multiplied by 500µs.
Input
Unsigned 16 bits
Output
None
Functions called
None
Caution
This routine exits only after the programmed delay has elapsed.
Meanwhile, the code execution remains frozen in a waiting loop.
Care should be taken when this routine is called at main/interrupt
level: a call from an interrupt routine with a higher priority than the
timebase interrupt will freeze code execution.
See also
STR750 datasheet: timebase timer.
TB_Set_Delay_500us
62/84
Synopsis
void TB_Set_Delay_500us(u16 hDelay)
Description
This function is used to update the wTimebase_500us static
variable.
Input
Unsigned 16 bits
Output
None
Functions called
None
UM0312
Motor control library routines
TB_Delay_IsElapsed
Synopsis
bool TB_Delay_IsElapsed(void)
Description
This function returns TRUE if ‘wTimebase_500us’ variable has
reached 0, else FALSE.
Input
None
Output
Boolean
TB_Set_DisplayDelay_500us
Synopsis
void TB_Set_DisplayDelay_500us(u16 hDelay)
Description
This function is used to update the ‘wTimebase_display_500us’
static variable.
Input
Unsigned 16 bits
Output
None
TB_Set_DebounceDelay_500us
Synopsis
void TB_Set_DebounceDelay_500us(u16 hDelay)
Description
This function is used to update the ‘wKey_debounce_500us’ static
variable.
Input
Unsigned 16 bits
Output
None
TB_DebounceDelay_IsElapsed
Synopsis
bool TB_DebounceDelay_IsElapsed(void)
Description
This function returns TRUE if ‘wKey_debounce_500us’ variable
has reached 0, else FALSE.
Input
None
Output
Boolean
63/84
Motor control library routines
UM0312
TB_IRQHandler
64/84
Synopsis
void TB_IRQHandler(void)
Description
This is the Timebase timer interrupt routine. This peripheral is
configured to produce an interruption every 500µs, thus providing a
general purpose timebase allowing the refresh of various variables
used mainly as counters (for example PID sampling time).
Input
None
Output
None
Functions called
ENC_Get_Average_Speed
PID_Speed_Regulator
TB_ClearFlag
Note
This is an interrupt routine.
See also
STR750 datasheet: timebase timer.
UM0312
4.2.12
Motor control library routines
75x_it.c module
PWM_EM_IRQHandler
Synopsis
void PWM_EM_IRQHandler(void)
Description
The purpose of this function is to refresh the ‘wGlobal_Flags’ and
‘State’ variables upon detection of a signal on the dedicated
emergency pin.
Functions called
PWM_ClearFlag, PWM_ITConfig
Note
This is an interrupt routine.
See also
STR750 datasheet: synchronizable PWM timer.
ADC_IRQHandler
Synopsis
void ADC_IRQHandler(void)
Description
The purpose of this function is to handle the ADC interrupt request.
All the PMSM FOC algorithm is processed in this interrupt routine.
Triggered by ADC ECH / JECH ISR, the function loads stator currents
(read by ICS or shunt resistors) and carries out Clark and Park
transformations, converting them to iqsλr and idsλr (see Figure 5).
Then, these currents are fed to PID regulators together with reference
values iqsλr * and idsλr *. The regulator output voltages vqsλr * and vdsλr
* then must be transformed back to a stator frame (through Reverse
Park conversion), and finally drive the power stage.
In order to correctly perform Park and Reverse Park transformation, it
is essential to accurately estimate the rotor flux position (θ λr): this is
done by calling the ENC_Get_Electrical_Angle routine.
Functions called 3 shunts configuration:
Clarke, Park, PID_Torque_Regulator, PID_Flux_Regulator,
RevPark_Circle_Limitation, Rev_Park,
SVPWM_3ShuntCalcDutyCycles, ENC_ResetEncoder,
SVPWM_3ShuntGPADCConfig,
SVPWM_3ShuntGetPhaseCurrentValues
Isolated current sensors (ICS) configuration:
Clarke, Park, PID_Torque_Regulator, PID_Flux_Regulator,
RevPark_Circle_Limitation, Rev_Park, SVPWM_IcsCalcDutyCycles,
ENC_ResetEncoder, SVPWM_IcsGetPhaseCurrentValues
Note
This is an interrupt routine.
See also
STR750 datasheet: synchronizable PWM timer.
65/84
Motor control library routines
UM0312
Figure 36. ADC interrupt request processing
ADC interrupt request?
State=RUN
State=START
State?
Ramp-up:
increase Flux component
End of
alignment?
Retrieve 3 phase current
Clarke transformation
Park transformation
Torque regulation
Flux regulation
Circle limitation
Reverse park transformation
Space vector PWM generation
No
Yes
State=RUN
Reset encoder
timer
Return from interrupt
4.2.13
MC_PID_regulators.c module
PID_Init
66/84
Synopsis
void PID_Init(void)
Description
The purpose of this function is to initialize the PID for torque, flux
and speed regulation. For each one, a set of default values are
loaded: target (speed, torque or flux), proportional, integral and
derivative gains, lower and upper limiting values for the output.
Functions called
None
Note
Default values for PID regulators are declared and can be modified
in MC_Control_Param.h file (see Section l on page 19).
UM0312
Motor control library routines
PID_Flux_Regulator
Synopsis
s16 PID_Flux_regulator(PID_FluxTYPEDEF *PID_Flux, s16
qId_input)
Description
The purpose of this function is to compute the proportional, integral
and derivative terms (if enabled, see
Id_Iq_DIFFERENTIAL_TERM_ENABLED in Section 2.2.1 on page 16) for
the flux regulation.
Input
PID_FluxTYPDEF (see ‘MC_type.h’ for structure declaration)
signed 16 bits
Output
Signed 16 bits
Functions called
None
Note
Default values for the PID flux regulation are declared and can be
modified in the MC_Control_Param.h file (see Section 2.2.4 on
page 18).
See also
Figure 42 on page 74 shows the PID block diagram.
Chapter 5: PID regulator implementation and tuning on page 70.
PID_Torque_Regulator
Synopsis
s16 PID_Torque_regulator(PID_TorqueTYPEDEF *PID_Torque,
s16 qIq_input)
Description
The purpose of this function is to compute the proportional, integral
and derivative terms (if enabled, see
Id_Iq_DIFFERENTIAL_TERM_ENABLED in Section 2.2.1 on page 16) for
the torque regulation.
Input
PID_TorqueTYPDEF (see MC_type.h for structure declaration)
signed 16 bits
Output
signed 16 bits
Functions called
None
Note
Default values for the PID torque regulation are declared and can
be modified in the MC_Control_Param.h file (see Section 2.2.4 on
page 18).
See also
Figure 42 on page 74 shows the PID block diagram.
Chapter 5: PID regulator implementation and tuning on page 70.
67/84
Motor control library routines
UM0312
PID_Speed_Regulator
Synopsis
s16 PID_Speed_regulator(PID_SpeedTYPEDEF *PID_Speed, s16
speed)
Description
The purpose of this function is to compute the proportional, integral
and derivative terms (if enabled, see
SPEED_DIFFERENTIAL_TERM_ENABLED in section 2.2.1 on page 16) for
the speed regulation.
Input
PID_SpeedTYPDEF (see ‘MC_type.h’ for structure declaration)
signed 16 bits
Output
signed 16 bits
Functions called
None
Note
Default values for the PID speed regulation are declared and can
be modified in the MC_Control_Param.h file (see Section 2.2.4 on
page 18).
See also
Figure 43 on page 75 shows the PID block diagram.
Chapter 5: PID regulator implementation and tuning on page 70.
PID_Reset_Integral_terms
Synopsis
void PID_Reset_Integral_terms(void)
Description
The purpose of this function is to reset all the integral terms of the
torque, flux and speed PID regulators.
PID_Speed_Coefficients_update
Synopsis
void PID_Speed_coefficients_update(s16 motor_speed)
Description
This function automatically computes the proportional, integral and
derivative gain for the speed PID regulator according to the actual
motor speed. The computation is done following a linear curve
based on 4 set points. See Section 5.2.2 on page 72 for more
information.
Functions called
None
Note
Default values for the four set points are declared and can be
modified in the MC_Control_Param.h file (see Section 2.2.4 on
page 18).
PID_Integral_Speed_update
68/84
Synopsis
void PID_Integral_Speed_update(s32 value)
Description
The purpose of this function is to load the speed integral term with
a default value.
UM0312
4.3
Motor control library routines
Application layer
The application layer is split into several modules, mainly for the control of the keys, LCD
display, temperature and bus voltage monitoring, and main loop. The following is a brief
description of these modules.
4.3.1
main.c module
This module contains the initialization and the main control loop of the overall firmware.
4.3.2
MC_Keys.c module
The purpose of the MC_Keys.c module is to centralize all information regarding the
keyboard reading. Any action on the keyboard is processed in the Keys_process routine.
4.3.3
MC_Display.c module
The purpose of the MC_Display.c module is to centralize all information regarding the LCD
display management.
4.3.4
75x_LCD.c module
This module contains some dedicated routines for the control of the LCD embedded with the
starter kit.
4.3.5
MC_dac.c module
This module contains some dedicated routines for the control of an external digital-to-analog
(DAC) device (AD7303).
4.3.6
MC_misc.c module
This module contains some dedicated routines for monitoring the temperature of the power
stage and the bus voltage.
69/84
PID regulator implementation and tuning
5
UM0312
PID regulator implementation and tuning
The regulators implemented for Torque, Flux and Speed are actually Proportional Integral
Derivative (PID) regulators (see note below regarding the derivative term). PID regulator
theory and tuning methods are subjects which have been extensively discussed in technical
literature. Section 5.1 provides a basic reminder of the theory.
5.1
Theoretical background
The purpose of such regulators is to maintain a level of torque, flux or speed according to a
desired target.
Figure 37. PID general equation
torque = f(rotor position)
flux = f(rotor position)
torque and flux regulation for maximum
system efficiency
torque regulation for speed regulation
of the system
torque = f(rotor speed)
Where:
Error sys
Error sys
T
T–1
Error of the system observed at time t = T
Error of the system observed at time t = T - Tsampling
T
f ( X T ) = K p × Error sys + K i ×
T
∑Errorsys + Kd × ( Errorsys
t
T
– Error sys
T–1
)
(1)
0
Derivative term can be disabled
Equation 1 corresponds to a classical PID implementation, where:
●
Kp is the proportional coefficient,
●
Ki is the integral coefficient.
●
Kd is the differential coefficient.
Note:
As mentioned in Figure 37, the derivative term of the PID can be disabled independently
(through a compiler option, see 75x_MCconf.h file) for the torque/flux or the speed
regulation; a PI can then be quickly implemented whenever the system doesn’t require a
PID control algorithm.
5.2
Regulation sampling time
The sampling time needs to be modified to adjust the regulation bandwidth. As an
accumulative term (the integral term) is used in the algorithm, increasing the loop time
decreases its effects (accumulation is slower and the integral action on the output is
delayed). Inversely, decreasing the loop time increases its effects (accumulation is faster
and the integral action on the output is increased). This is why this parameter has to be
adjusted prior to setting up any coefficient of the PID regulator.
In order to keep the CPU load as low as possible and as shown in equation (1) in Figure 37,
the sampling time is directly part of the integral coefficient, thus avoiding an extra
70/84
UM0312
PID regulator implementation and tuning
multiplication. Figure 38 describes the link between the time domain and the discrete
system.
Figure 38. Time domain to discrete PID equations
Time domain
f ( t ) = K p × Error sys ( t ) + K i ×
t
∫
0
Error sys ( t ) dt + K d × d ( Error sys ( t ) )
dt
T
Discrete
domain
f ( X T ) = K p × Error sys + k i × T s ∑Error sys + K d × ( Error sys – Error sys
T
t
T
T–1
)
0
(sampling done at Fs = 1/Ts frequency)
5.2.1
ki × Ts = Ki
Adjusting the regulation sampling time
In theory, the higher the sampling rate, the better the regulation. In practice, you must keep
in mind that:
●
The related CPU load will grow accordingly.
●
For speed regulation, there is absolutely no need to have a sampling time lower than
the refresh rate of the speed information fed back by the external sensors; this
becomes especially true when all sensors are used while driving the motor at low to
medium speed.
●
At high speed, in most cases, system inertia is such that the system response is slow:
in these conditions, there is no need to have a high sampling rate.
The speed regulation loop sampling time must be set in the 75x_TBtimer.c file (Time
Base timer interrupt routine). Note that the sampling time is actually a multiple of the period
of the Timebase timer interrupt update routine (500 µS by default). This is an 8-bit value
(255 max).
Figure 39. Speed regulation sampling time adjustment in 75x_TBtimer.c
void TB_IRQHandler(void)
{
.....
if (bPID_Speed_Sampling_Time_500us != 0 )
{
bPID_Speed_Sampling_Time_500us --;
}
else
{
bPID_Speed_Sampling_Time_500us = PID_SPEED_SAMPLING;
.........
}
71/84
PID regulator implementation and tuning
UM0312
For the torque and flux regulation loop sampling time, the PID_SPEED_SAMPLING
parameter must be set in the MC_Control_Param.h file. Note that the sampling time is:
●
A multiple of the PWM switching period in three-shunt configuration. The REP_RATE
value can only be an odd number (8-bit value).
●
A multiple of half of the PWM switching period in isolated current sensor configuration.
The REP_RATE value can be any number (8-bit value).
The torque/flux regulation sampling time adjustment is defined as follows in the
MC_Control_Param.h file:
#define REP_RATE (1)// (N.b): Internal current loop is performed every
//
(REP_RATE + 1)/(2*PWM_FREQ) seconds.
// REP_RATE has to be an odd number in case of three-shunt
// current reading; this limitation doesn't apply to ICS
5.2.2
Adjusting the speed regulation loop Ki, Kp and Kd vs the motor
frequency
Depending on the motor frequency, it might be necessary, to use different values of Kp, Ki
and Kd.
These values have to be input in the code to feed the regulation loop algorithm. A function
performing linear interpolation between four set-points
(PID_Speed_Coefficient_update) is provided as an example in the software library
(see MC_PID_regulators.c) and can be used in most cases, as long as the coefficient
values can be linearized. If that is not possible, a function with a larger number of set-points
or a look-up table may be necessary.
To enter the four set-points, once the data are collected, edit the MC_Control_param.h
file and fill in the field dedicated to the Ki, Kp and Kd coefficient calculation as shown below.
//Settings for min
#define Freq_Min
#define Ki_Fmin
#define Kp_Fmin
#define Kd_Fmin
frequency
10
// 1 Hz mechanical
1000
// Frequency min coefficient settings
2000
3000
//Settings for intermediate frequency 1
#define F_1
50 // 5 Hz mechanical
#define Ki_F_1
2000
// Intermediate frequency 1 coefficient settings
#define Kp_F_1
1000
#define Kd_F_1
2500
//Settings for intermediate frequency 2
#define F_2
200 // 20 Hz mechanical
#define Ki_F_2
1000
// Intermediate frequency 2 coefficient settings
#define Kp_F_2
750
#define Kd_F_2
1200
//Settings for max
#define Freq_Max
#define Ki_Fmax
#define Kp_Fmax
#define Kd_Fmax
72/84
frequency
500
// 50 Hz mechanical
500
// Frequency max coefficient settings
500
500
UM0312
PID regulator implementation and tuning
Once the motor is running, integer, proportional and derivative coefficients are computed
following a linear curve between F_min and F_1, F_1 and F_2, F_2 and F_max (see
Figure 40). Note that F_min, F_1, F_2, F_max are mechanical frequencies, with 0.1 Hz
resolution (for example F_1 = 1234 means F_1 = 123.4Hz).
Figure 40. Linear curve for coefficient computation
Ki, Kp, Kd
Ki_F_2, Kp_F_2, Kd_F_2
Ki_Fmax, Kp_Fmax
Kd_Fmax
Ki_F_1, Kp_F_1, Kd_F_1
Ki_Fmin, Kp_Fmin, Kd_Fmin
F_min
F_1
F_2
F_max
Rotor mechanical
frequency
Disabling the linear curve computation routine, 75x_it.c module
If you want to disable the linear curve computation, you must comment out the
PID_Speed_Coefficients_update(..) routine. In this case, the default values for Ki, Kp, Kd for
torque, flux and speed regulation are used. See PID_TORQUE_Kx_DEFAULT,
PID_FLUX_Kx_DEFAULT, PID_SPEED_Kx_DEFAULT, in the MC_control_Param.h file.
To disable the linear curve computation routine in the 75x_it.c module:
void TB_IRQHandler(void)
{
........
if ((wGlobal_Flags & CLOSED_LOOP) == CLOSED_LOOP)
{
if (State == RUN)
{
//PID_Speed_Coefficients_update(hRot_Freq_Hz); // to be commented out
....... .
}
5.3
Tricks and traps
When tuning the PID parameters you should consider the worst case conditions, which may
be when the load varies quickly and unpredictably, when the inertia is at a minimum, or
when the mains voltage is maximum for an off-line application.
If regulation tuning is performed in no-load condition (at the highest), it will most probably be
unresponsive in the final application, and vice versa: regulation tuning performed in the
application may become unstable in no-load conditions.
73/84
PID regulator implementation and tuning
5.4
UM0312
Implementing closed loop regulation
Below is an example of the use of the speed regulation process.
Figure 41. Speed regulation loop call in 75x_TBTimer.c
if (bPID_Speed_Sampling_Time_500us != 0 )
{
bPID_Speed_Sampling_Time_500us --;
}
else
{
bPID_Speed_Sampling_Time_500us = PID_SPEED_SAMPLING;
PI(D) computed every 2ms
....
PID_Speed_Coefficients_update(hRot_Freq_Hz);
PID_Torque_InitStructure.Reference = PID_Speed_Regulator(&PID_Speed_InitStructure,
hRot_Freq_Hz); // 6 hz
}
Torque value increased by PID (resp.
decreased) when motor speed too low
(resp. high)
Note:
The PID_Speed_Regulator routine needs to be fed with a mechanical frequency input.
The following flow diagrams (Figure 42 and Figure 43) show the decision tree for the
computation of the torque/flux and speed regulation routines.
Figure 42. Torque/flux control loop block diagram
Target Torque/Flux
Measured Torque/Flux
Torque/Flux error (signed 16 bit)
Proportional = Kp x Torque/Flux Error
Is PI output
saturated?
No
Integral = Integral + Ki x Torque/Flux Error
Integral term frozen
If enabled
See
important
note in
section 2.2.1
Differential = Kd x (Error Torque/Flux Previous Error Torque/Flux)
Clamp Output value to
signed int domain
Output = Proportional/2^13 + Integral/2^16
+ Differential terms/2^13
Is Output < PI(D) lower limit
or > PI(D) upper limit
No
Reset Saturated Output Flag
return Output value
(signed 16 bit)
74/84
Yes
Clamp Output value to unsigned [PI(D) lower limit..PI(D) upper limit]
Set Saturated Output Flag
UM0312
PID regulator implementation and tuning
Figure 43. Speed control loop block diagram
Target speed
Current speed
Speed error (signed 16 bit)
Proportional = Kp x Speed Error
Is PI output
saturated?
No
Integral = Integral + Ki x Slip Error
Integral term frozen
If enabled
See
important
note in
section 2.2.1
Differential = Kd x (Error Speed Previous Error Speed)
Clamp Output value to
signed int domain
Output = Proportional/2^8 + Integral/2^14
+ Differential terms/2^8
Is Output < PI(D) lower limit Yes
or > PI(D) upper limit
No
Clamp Output value to unsigned [PI(D) lower limit..PI(D) upper limit]
Set Saturated Output Flag
Reset Saturated Output Flag
return Output value
(signed 16 bit)
75/84
MISRA compliance
6
UM0312
MISRA compliance
Based on the ‘The Motor Industry Software Reliability Association’s Guidelines for the Use
of the C Language in Vehicle Based Software‘, the purpose of this section is to provide a
report of any MISRA deviation in the version 1.0 of the library modules.
6.1
Analysis method
The software library was checked for MISRA compliance using the IAR Embedded
Workbench® toolchain. The IAR Systems’ implementation is based on version 1 of the
MISRA C rules, dated April 1998.
6.2
Limitations
Compliance tests were performed on required MISRA rules only, and not on advisory rules.
Due to the extensive use of the STR750 standard library which itself is not fully MISRA
compliant (as of September 2006), the interaction (through function calls for example)
between the standard library and PMSM library modules necessarily induces noncompliances.
The main reason is due to the fact the STR750 standard library routines rely on baseaddress pointer parameters (e.g. pointer to a hardware register memory address) that are
then re-casted as the first address of a structure inside the function call, as shown in the
example in Figure 44.
Figure 44. Example of function call generating a MISRA rule 45 error
declared in module 75x_tim.c
of standard library
Pointer to TIMER1 peripheral
register base address
TIM_ResetCounter(TIM1);
75x_tim.c module:
void TIM_ResetCounter(TIM_TypeDef* TIMx) {...}
Pointer to TIMER1 peripheral base address is passed as
the base address of the ‘TIM_TypeDef’ structure
76/84
UM0312
6.3
MISRA compliance
MISRA compliance for PMSM library files
Table 4.
MISRA compliance of PMSM library files
Module name
MISRA
compliant
MC_Clarke_Park.h
Yes
MC_RevPark.h
Yes
MC_qmath.h
Yes
MC_const.c
Yes
MC_const.h
Yes
MC_type.h
Yes
75x_TBTimer.c
Yes
75x_TBTimer.h
Yes
MC_Globals.c
Yes
MC_Globals.h
Yes
MC_Display.c
Yes
MC_Display.h
Yes
MC_PMSM_motor_param.h
Yes
75x_MClib.h
Yes
MC_Control_Param.h
Yes
75x_conf.h
Yes
75x_MCconf.h
Yes
MC_encoder_param.h
Yes
Deviation
75x_svpwm_3shunt.c
MISRA rule 45 non-compliance due to
STR750 standard library function call. (See
Section 6.2: Limitations on page 76)
75x_svpwm_3shunt.h
MISRA rule 45 non-compliance due to
STR750 standard library function call. (See
Section 6.2: Limitations on page 76)
75x_svpwm_ics.c
MISRA rule 45 non-compliance due to
STR750 standard library function call. (See
Section 6.2: Limitations on page 76)
75x_svpwm_ics.h
MISRA rule 45 non-compliance due to
STR750 standard library function call. (See
Section 6.2: Limitations on page 76)
Main.c
MISRA rule 45 non-compliance due to
STR750 standard library function call. (See
Section 6.2: Limitations on page 76)
75x_encoder.c
MISRA rule 45 non-compliance due to
STR750 standard library function call. (See
Section 6.2: Limitations on page 76)
75x_encoder.h
Yes
77/84
MISRA compliance
UM0312
Table 4.
MISRA compliance of PMSM library files
Module name
MISRA
compliant
75x_it.c
MISRA rule 45 non-compliance due to
STR750 standard library function call. (See
Section 6.2: Limitations on page 76)
75x_lcd.c
MISRA rule 45 non-compliance due to
STR750 standard library function call. (See
Section 6.2: Limitations on page 76)
75x_lcd.h
Yes
MISRA rule 45 non-compliance due to
STR750 standard library function call. (See
Section 6.2: Limitations on page 76)
MC_Keys.c
MC_Keys.h
Yes
MISRA rule 45 non-compliance due to
STR750 standard library function call. (See
Section 6.2: Limitations on page 76)
MC_Misc.c
MC_Misc.h
Yes
MISRA rule 45 non-compliance due to
STR750 standard library function call. (See
Section 6.2: Limitations on page 76)
MC_DAC.c
MC_DAC.h
78/84
Deviation
Yes
UM0312
Additional information
Appendix A
A.1
Additional information
Adjusting CPU load related to PMSM FOC algorithm
execution
The Synchronizable-PWM Timer peripheral has the built-in capability of updating PWM
registers only after a given number of PWM semi-periods. This feature is handled by a
programmable repetition counter. It is particularly useful to adjust the CPU load related to
PMSM FOC algorithm execution for a given PWM frequency (refer to STR750 Reference
Manual for more information on programmable repetition counter).
When using ICS, the injected chain of conversions for current reading is directly triggered by
a PWM register update event. Moreover, since the PMSM FOC algorithm is executed at the
end of the injected chain of conversions in the related ISR, changing the repetition counter
has a direct impact on PMSM FOC refresh rate and thus on CPU load.
However, in the case of three shunt topology current reading, to ensure that the PMSM FOC
algorithm is executed once for each PWM register update, it is necessary to keep the
synchronization between current conversions triggering and PWM signal. In the proposed
software library, this is automatically performed, so that you can reduce the frequency of
execution of the PMSM FOC algorithm by simply changing the default value of the repetition
counter (the REP_RATE parameter in the MC_Control_Param.h header file).
Figure 45 shows current sampling triggering, and PMSM FOC algorithm execution with
respect to PWM period when REP_RATE is set to 3.
Figure 45. AD conversions for three shunt topology stator currents reading and
PMSM FOC algorithm execution when REP_RATE=3
Note:
Because three shunt resistor topology requires low side switches to be on when performing
current reading A/D conversions, the REP_RATE parameter must be an odd number in this
case.
79/84
Additional information
UM0312
Considering that the raw PMSM FOC algorithm execution time is about 25.7µs when in
three shunt resistor stator current reading configuration, the related contribution to CPU load
can be computed as follows:
F PWM
F PWM
–6
–6
CPU Load = ------------------------------------- × 25.7 × 10 × 100 = ------------------------------------------------------- × 25.7 × 10 × 100
RefreshRate
( REPRATE + 1 ) ⁄ 2
A.2
Selecting PWM frequency for 3 shunt resistor configuration
Beyond the well known trade-off between acoustical noise and power dissipation,
consideration should be given to selecting the PWM switching frequency using the PMSM
software library.
As discussed in Section 4.2.4 on page 39, depending on the PWM switching frequency, a
limitation on the maximum applicable duty cycle could occur if using three shunt resistor
configuration for current reading. Table 3: PWM frequency vs maximum duty cycle on
page 47, summarizes the performance of the system when the software library is used in
conjunction with the STR750-MCKIT hardware.
Note:
The MB459 board is an evaluation platform; it is designed to support different motor driving
topologies (PMSM and AC induction) and current reading strategies (single and three shunt
resistors). Therefore, the figures given in Table 3 on page 47 should be understood as a
starting point and not as a best case.
Moreover, to keep the synchronization between TIM0 and PWM peripherals, it is always
necessary to finish executing the PMSM FOC algorithm before the next PWM period begins
as shown in Figure 46.
Figure 46. FAD conversions for three shunt topology stator current readings and
PMSM FOC algorithm execution when REP_RATE=1
80/84
UM0312
Additional information
Given that the raw execution time of the PMSM FOC algorithm is around 25.7µs and that
other delays (such as the time necessary to enter ADC ISR) have to be considered, this
limits to about 14.4 kHz the maximum PMSM FOC algorithm execution rate when using
REP_RATE =1. However, no limitations occur in the typical range of PWM frequencies when
using REP_RATE=3.
The following table summarizes the performance of the system for different PWM
frequencies.
Table 5.
A.3
System performance when using STR750-MCKIT
PWM frequency
Max applicable duty cycle
Up to 11.4kHz
100%
12.2kHz
99.5%
12.9kHz
99%
13.7kHz
98.5%
14.4kHz
98%
15.2kHz
97.5%
16kHz
97%
16.7kHz
96.5%
17.5kHz
96%
Max FOC algorithm execution rate
Equal to PWM frequency
Equal to PWM frequency/2
(REP_RATE=3)
Fixed-point numerical representation
The PMSM software library uses fixed-point representation of fractional signed values.
Thus, a number n is expressed as
n = m. f
where m is the integer part (magnitude) and f the fractional part, and both m and f have fixed
numbers of digits.
In terms of two’s complement binary representation, if a variable n requires QI bits to
express - as powers of two - its magnitude (of which 1 bit is needed for the sign), QF bits –
as inverse powers of two - for its fractional part, then we have to allocate QI + QF bits for that
variable.
Therefore, given a choice of QI and QF, the variable representation has the following
features:
●
Range: -2(QI-1) n < 2(QI-1) – 2(-QF) ;
●
Resolution: = 1 / 2QF.
The equation below converts a fractional quantity q to fixed-point representation n:
n = floor (q ⋅ 2QF )
A common way to express the choice that has been made is the “q QI.QF” notation.
81/84
Additional information
UM0312
So, if a variable is stored in q3.5 format, it means that 3 bits are reserved for the magnitude,
5 bits for the resolution; the expressible range is from -4 to 3.96875, the resolution is
0.03125, the bit weighting is:
bit n.
7
6
5
4
3
2
1
0
value
-4
2
1
1/2
1/4
1/8
1/16
1/32
This software library uses the PU (“Per Unit”) system to express current values. They are
always referred to a base quantity that is the maximum measurable current Imax (which, for
the proposed hardware, can be estimated approximately at Imax = 0.6 / Rshunt); so, the “per
unit” current value is obtained by dividing the physical value by that base:
i PU =
iS .I .
I max
In this way, ipu is always in the range from -1 to +1. Therefore, the q1.15 format, which
ranges from -1 to 0.999969482421875, with a resolution of 0.000030517578125, is perfectly
suitable (taking care of the overflow value (-1)·(-1)=1) and thus extensively used.
Thus, the complete transformation equation from SI units is:
⎛ i
⎞
iq1.15 = floor ⎜⎜ S . I . ⋅ 2QF ⎟⎟
⎝ I MAX
⎠
A.4
Additional or up-to-date technical literature
More information can be found on the ST website (www.stmcu.com).
More specifically, the latest documents and software can be found directly at:
http://www.stmcu.com/inchtml-pages-str750.html.
In addition, FAQ and Forums can be found directly at :
http://www.stmcu.com/forumsid-17.html for STR7 general enquiries.
http://www.stmcu.com/forumsid-13.html for motor control related enquiries.
A.5
References
[1] P. C. Krause, O. Wasynczuk, S. D. Sudhoff, Analysis of Electric Machinery and Drive
Systems, Wiley-IEEE Press, 2002.
[2] T. A. Lipo and D. W. Novotny, Vector Control and Dynamics of AC Drives, Oxford
University Press, 1996.
[3] P. Vas, Sensorless Vector and direct Torque Control, Oxford University Press, 1998.
82/84
UM0312
7
Revision history
Revision history
Table 6.
Document revision history
Date
Revision
9-Feb-2006
1
Changes
Initial release.
83/84
UM0312
Please Read Carefully:
Information in this document is provided solely in connection with ST products. STMicroelectronics NV and its subsidiaries (“ST”) reserve the
right to make changes, corrections, modifications or improvements, to this document, and the products and services described herein at any
time, without notice.
All ST products are sold pursuant to ST’s terms and conditions of sale.
Purchasers are solely responsible for the choice, selection and use of the ST products and services described herein, and ST assumes no
liability whatsoever relating to the choice, selection or use of the ST products and services described herein.
No license, express or implied, by estoppel or otherwise, to any intellectual property rights is granted under this document. If any part of this
document refers to any third party products or services it shall not be deemed a license grant by ST for the use of such third party products
or services, or any intellectual property contained therein or considered as a warranty covering the use in any manner whatsoever of such
third party products or services or any intellectual property contained therein.
UNLESS OTHERWISE SET FORTH IN ST’S TERMS AND CONDITIONS OF SALE ST DISCLAIMS ANY EXPRESS OR IMPLIED
WARRANTY WITH RESPECT TO THE USE AND/OR SALE OF ST PRODUCTS INCLUDING WITHOUT LIMITATION IMPLIED
WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE (AND THEIR EQUIVALENTS UNDER THE LAWS
OF ANY JURISDICTION), OR INFRINGEMENT OF ANY PATENT, COPYRIGHT OR OTHER INTELLECTUAL PROPERTY RIGHT.
UNLESS EXPRESSLY APPROVED IN WRITING BY AN AUTHORIZED ST REPRESENTATIVE, ST PRODUCTS ARE NOT
RECOMMENDED, AUTHORIZED OR WARRANTED FOR USE IN MILITARY, AIR CRAFT, SPACE, LIFE SAVING, OR LIFE SUSTAINING
APPLICATIONS, NOR IN PRODUCTS OR SYSTEMS WHERE FAILURE OR MALFUNCTION MAY RESULT IN PERSONAL INJURY,
DEATH, OR SEVERE PROPERTY OR ENVIRONMENTAL DAMAGE. ST PRODUCTS WHICH ARE NOT SPECIFIED AS "AUTOMOTIVE
GRADE" MAY ONLY BE USED IN AUTOMOTIVE APPLICATIONS AT USER’S OWN RISK.
Resale of ST products with provisions different from the statements and/or technical features set forth in this document shall immediately void
any warranty granted by ST for the ST product or service described herein and shall not create or extend in any manner whatsoever, any
liability of ST.
ST and the ST logo are trademarks or registered trademarks of ST in various countries.
Information in this document supersedes and replaces all information previously supplied.
The ST logo is a registered trademark of STMicroelectronics. All other names are the property of their respective owners.
© 2007 STMicroelectronics - All rights reserved
STMicroelectronics group of companies
Australia - Belgium - Brazil - Canada - China - Czech Republic - Finland - France - Germany - Hong Kong - India - Israel - Italy - Japan Malaysia - Malta - Morocco - Singapore - Spain - Sweden - Switzerland - United Kingdom - United States of America
www.st.com
84/84