1
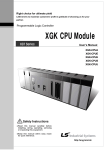
Example 2: Dual Set Point / PID A heat treating furnace is required to harden the mold at a high temperature ( 1000 C ) for 30 minutes, then the mold is cooled down with a programmable ramp ( 20 C / minute ) toward a lower set point ( 200 C ). Use the dual set point / PID and ramp / dwell functions for this application. ( 1 ) Set the following parameters in the Setup menu: FUNC= FULL A1FN= TIMR EIFN= SP.P2 PVMD= PV1 SPMD= MINR ( 2 ) Adjust the following parameters in the User menu: TIME= 30.0 ( Minutes ) RAMP= 20.0 ( C/Minute ) SP1= 1000 C SP2= 200 C PL1= 100 ( % ) ( 3 ) Set the proper values for PB1, TI1, TD1,PB2, TI2 and TD2 directly according to the previous records. For a new system tune first PID set at SP1=800 C and tune second PID set at SP2=400 C. The circuit diagram is same as shown in Figure 5.14. The temperature profile is shown as below: C 30 minutes 40 minutes Figure 5.16 Dual Set Point /PID Profile 1000 200 Use SP1,PID1 Use SP2,PID2 Time ( Minutes ) 95