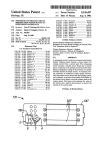
US. Patent Feb. 18, 1992 Sheet 60f 10 5,089,928 Hf) (AMPS) 100.00-- /A\. 90.00» 00.00» / \ 70.00- / /_\ // \ \ / A \ 60.0 . /» \\ /, 332:1" // \N \\ / / \ \ \ / 10.00 0.00--» 0.0 .. 2.5 5.0 7.5 10.0 12.5 TIME (ms) F165 15.0 17.5 20.0 22.5