1
OWN
DESCRIPTION
DATE REV NO
APPD
CHKD
' SUBMITTED TO OWNER FOR APPROVAL.
2004
07.05
ISSUED FOR WORKING.
*APPgoVfrD BV
x |4gU£E
g
A//)
£ S BH s
STAMP AREA
BH
{1 )S
r.TAERSK WILLOW
MSSB (US)
.S
m
IMO 9303546
DAE 4437
PROJ. NO.
PROJECT
4437/38/41
FOR CONST.
D FOR REVISION
A.P MOLLER 45',000 M2 PURE CAR/TRUCK CARRIER
APPD BY
TITLE
7
CHKD BY
(H.S. BAEK)
CTEL: 4264)
OWN BY
V/D OF
SIDE THRUSTER
KTE & HYUNDAI
DEPT.
SCALE
HULL OUTFITTING DATE
2004.07.05 AS SHOWN
DESIGN TEAM
E-1012
DWG
REV NO.
DV4040001
DSME :nui>goMM«umi:*
MESSRS :
DAEWOO SHIPBUILDING & MARINE
ENGINEERING CO., LTD
SHIP NO. : DSME / H4437-8 , H4441
TITLE :
SPECIFICATION
OF
THREE PHASE INDUCTION MOTOR
1400KW x 6P x 6600V - BOW THRUSTER
/\H Y U N D A I
HEAVY INDUSTRIES CO., LTD
ELECTRO ELECTRIC SYSTEMS
FOR FINAL
APPROVED BY
K.J.KANG
CHECKED BY
FOR FINAL
2 05.09.12
r
K.S.KIM
FOR WORK NG
04.11.25
FOR APPROVAL
0 04.06.23
NO.
CHECKED BY
DESCRIPTION
DATE
CHECKED BY
CHANGE OF ALTERATION
DESIGNED BY
1 04.11.25
NO.
DATE
K.S.KIM
—
REVD BY
CHKD BY
REVISIONS
RM-W230-049-3
K.S.KIM
K.S.KIM K.J.KANG
CLASS
DNV
CHKD BY
DATE
2004-03-12
APPD BY
DWG. NO.
APP - 4RPH093-095
A4(210mm x 297mm)
Y U N D A
I
DATA SHEET
RFQ. No.
Three Phase Induction Motor
ieavy Industries Co.. Ltd.
I Project No. I4RPH093-5
DSME / H4437-8.H4441
reject Name
1400
6600
A T I NG
KW 6
60 Hz
GENERAL DATA
Rev. No.
[
Item No.
Q'ty
0 1
l Set/Ship
TECHNICAL DATA
IEC.DNV
BOW THRUSTER
630
HLA7 636-66Y
losure-Protection Degree
TEAAC - IP 44
is t rue t ion-Cooling Method
V10
- IC511
INDOOR
at ion
NON-HAZARDOUS.NON-SEISMIC
:a Classification
iulation Class
75 °C
ip. RiseCResi stance method)
ent Temperature
45
°C
LP TO 1000 METER
It i tude
90
i liditv
S2 / 1.0 (30 Min.)
tv-Service Factor
COLD: 2 / HOT: 1
iber of consecutive starts
NEMA DESIGN B
lectrical Design
DIRECT
upling Method
laft Extension
SINGLE
Type
ANTI-FRICTION
6226C3 / 7322B
D.E / N-D.E No.
aring
Lubrication
GREASE
ternal Thrust
NOT APPLICABLE
licable Standard
ignation of Driven Machine
ne No.
ACCESSORIES
Rotor Type
Starting Method
Current
Torque
Rated
Starting
Rated
Starting
Break Down
100 % Load
(*)
(*)
(*)
Efficiency
100 % Load
O.SSO
Power Factor
Rated Speed
Load GD2 (**)
Motor GD2
Direction of Rotation
Location of Main Terminal Box
Paint Colour (Munsell No.)
Motor Weight (Approx.)
1187
rpm
kg275
kg-m2
REFER TO OUTLINE DWG
REFER TO OUTLINE DWG
10 GY 8/4
5100
kg
Sound Pressure Level - mean value,
measured at 1 meter distance from moVibration
Witness Test
WINDING TEMP. DETECTOR (PT 100 ohm):2EA/PHASE
SPACE HEATER : 220V, 630W. 1 PHASE
SQUIRREL CAGE
AUTO T/R 65% TAP
146.5
600
1148.8
kg-m
90
200
95.0
- dB(A)
3.8 mm/sec. (Peak)
DNV
SUBMITTAL DRAWING
** SPARE PART ***
BEARING (6226G+7322B)
OUTLINE DIMENSION DRAWING NO.
MAIN TERMINAL BOX DRAWING NO.
ACC'Y TERMINAL BOX DRAWING NO.
ACC'Y T/B WIRING DIAGRAM AWG. NO.
GENERAL ASSEMBLY DRAWING NO.
MAIN NAME PLATE DRAWING NO.
SPARE PART LIST DRAWING NO.
1 SET / SHIP
Rs = 0.97%, Rr - 2.77%, Xm = 16.97%
Starting Power Factor : 23.2%
Starting Current at Auto TR 65% TAP : 371.4 A
Starting KVA at Auto TR 65% TAP : 4245.7 KVA
ite : Others not mentioned in this specification
shall be in accordance with HHI standard.
\bove technical data are only design values and shall
)e guaranteed with tolerance of applicable standard.
-W230-119-1
(*) : Value at f u l l voltage starting.
Date
Prepared
K.S.KIM
20040623
(**) : Referred to Motor Shaft
Checked
HM-070565
3M-049656
3M-025056
4M-047000
2M-070472
4M-052647
4M-056186
Checked
Approved
K.S.KIM
K.J.RANG
A4(210mm X 297mm)
lo
|o
II
I DETAIL OF UFTING LUG l
MAIN T/BOX
3 n»
5? S-
tlo 4
OU_
B"J°
»J S
o
l
.or
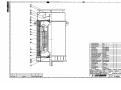
THREE PHASE INDUCTION SQUIRREL CAGE ROTOR MOTOR
OQ
:g
TYPE
OUTPUT
POLE
VOLTS
FREQ.
HLA7
636-66Y
1 400 KW
6P
6600V
60 HZ
PROT.
IP44
INS CUSS
F
SYN. RPM
MOUNT
TOTAL WIGHT
1200RPM
V 10
5100 KG
BEARING
N-D.E
D.E
6226C3
7322B
NOTE
oo
zo:
QUJ
Si
W
VW
WW
REV
60S
12.5S
3.2S
DESCRIPTION
Q'TY
1. THIS MOTOR IS DESIGNED TO BE OPERATED IN ARROW DIRECTION.
2. EXTERNAL THRUST ; NOT APPLICABLE
0.4S
2004.11.22 REV. OF OWNER COMMENT
REV. OF ROTATION (C.W -> C.C.W)
DATE
CONTENTS
K.J. KANG
K. S. KIM K.J. KANC 18-83
K. S. KIM
REVO BY CHKD BY CHKD BY APPDBY
K. S. KIM
K. S. KIM
APPO
CHKD
CHKD
DSND
BY
BY
BY
BY
K. J. KANG
K. S. KIM
MATERIAL
UNIT
SCALE
PROJEC'N
KIM KVANG SDC DATE
DIMENSION
SUBJECT
WEIGHT
PART NO.
HLA7 636-66Y
NON SCALE
TITLE
Angle)
2004-06-23
REF. NO
HYUNDAI
HEAVY INDUSTRIES CO., LTD.
INDUSTRIAL 1C POWER SYSTEMS
REMARK
NO.
OP PRO) T \ FILE •»
S/AX1-15)
OUTLINE DIMENSION DWG.
DWG NO
Sheet No.
HM— 070565
Revision No.
of
2
THIS DRAWING IS PROPRIETARY TO HHI. NO PART OF THIS DRAWING
MAYBE REPRODUCED WITHOUT THE PERMISSION OF HHI.
e säe
HEAVY INDUSTRIES CO., LTD
HYUNDAI
O
ro
on
o
en
en
C/)
fc
CD
O
X
>
O
O
THIS DRAWING IS PROPRIETARY TO HHI. NO PART OF THIS DRAWING
MAYBE REPRODUCED WITHOUT THE PERMISSION OF HHI.
a 240
HEAVY INDUSTRIES CO.. LTD.
HYUNDAI
REV
DATE
CONTENTS
REVO BY CHKD BY CHKD BY APPD BY
a
I I
o
z
l
o
z
Q
Q
o:
o
o:
2
\
(NCMCMrOrOIO1<J-'<J-Tj-lfilOlOCOCOCO
*~
T-
CM
T-
££££££5^££££££
w w
l l l l l l l l l l l l l l l l l l
o o o o o o o o o o o o o o o o o o o o o o o o
l
NOTE
1) WT11.12,13/41,42,43 ; Winding temp, sensor (U) - Pt 100 ohm
2) WT21,22.23/51,52,53 ; Winding temp, sensor (V) - Pt 100 ohm
3) WT31.32,33/61,62,63 ; Winding temp, sensor (W) - Pt 100 ohm
4) SH11.12; Space heater
WTD SETTING POINT (AMBIENT TEMP. : 4-5'C)
WINDING
ALARM
TRIP
130 T 140 *C
DESCRIPTION
APPD BY
H. H. LEE
UNIT
CHKD BY
J. S. PARK
SCALE
NONE
PROJEC'N
3 *TC(3rd Angle)
DATE
2004.06.23
CHKD BY
DSND BY
KIMKWANGSOO
MATERIAL
DIMENSION
Q'TY
MM
HYUNDAI
HEAVY INDUSTRIES CO., LTD.
INDUSTRIAL äc. POWER
SYSTEMS
WEIGHT
PART NO.
REMARK
NO.
CAD PROJ 1 \ FILE
SUBJECT
TITLE
WIR-DIAG\4K047000
ACC'Y TERMINAL BOX
WIRING DIAGRAM
Sheet No.
REF. NO
DWG NO
4M-047000
Revision No.
of
lUONflAH
o
-n
ro
-f^
-j
O
Ul
col
p
Z
o
an
x
(/>
7;
O
'"D
5m
m
~TD
co
a
3
o_
Ol
o
o
c
o
ui
to
x
| T;
o
o
ISl
o
o
o
p
73
m
to
o
O
O
2
s
l
m
5
70
m
o
OIS
O
ERIA
bo
o
o
-(i
01
c
l/)
ro
o
o
i
É
m
o
O
«L
m
m
CO
CO
m
O
m
0
m
CO
o
TI
(/)
M
T)
TI
m
Hl
«=3
J_
DRAWING IS PROPRIETARY TO HEECO. NO PAWOFTHIS DRAWING
MAYBE REPRODUCED WITHOUT THE PERMISSION OF HHI.
o
HEAVY INDUSTRIES CO.,
o
01 OJ
LTD.
1
2
l
1
I
3
4
|
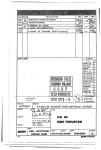
SPARE PART LIST FOR INDUCTION MOTOR
G
SPEC
G
1050KW x 6P STERN THRUSTER
QUANTTITY
ITEM
NO
NAME
OF
PARTS
OUTLINE
DIMENSION
F
—-
ROLLER
BEARING
1
42
Q
o
IT)
CM
IS
'
WORKING
PER
MOTOR
1
O
"*-
SPARE
PER
SHIP
REMARK
PER
SHIP
1
F
NU228M
1
s
E
E
U
50
—
ANGULAR
CONTACK
BALL
BEARING
2
D
O
0
^•a
CM
o
1
1
#7322B
1
D
IS
Q
C
C
B
B
Q'TY
MATERIAL
DESCRIPTION
APPD BY
K. J. KANG
CHKD BY
K. S. KIM
UNIT
MM
SCALE
NONE
DIMENSION
WEIGHT
PART NO.
siiR.irrr
NO.
REMARK
BRG-AS02\4R0561 87
MILL.
A CHKD BY
DSND BY
KIMKWANGSOO
PROJEC'N
3 rd Angle
DATE
2004.06.23
A HYUNDAI
*-
^
1
HEAVY INDUSTRIES CO.,
LTD.
INDUSTRIAL & POWER SYSTEMS
2
1
1
A
SPARE PART LIST
REF. NO
DWG NO
3
Sheet No.
4M-056187
I
4
Revision No.
I
of
0
A . rui •&«•*•
A HYUNDAI
MOTOR TYPE
:
HLA7 634-64Y
1050
RATED TORQUE :
863.0
GD2 OF MOTOR :
160
2
GD OF LOAD
:
300
250
kg.m
kg.m2
2
66.3
£
l
I
l_
i
I
'
kg.m
!
I
L
!
_|
i
I
[
J
i,
!
i
I
1
!
r1
§
1.
!.
,
!
i
i
r
1
i
1
i
!
r
r
r
i
!
!
l
l
1648.0
A
!D :
i•"
l
!
V
!
[
J
!
I
'
i
L
i
I
L
!
U
i
\
l
1
1l
:
;
:
i
!
1
L
1
0
(}
L
1
1
~i i 1 i '
NOT E :
REMARK.
L
1
111!
10
i
i
r
\
-~r — -
i
lp
.
1
; /: \
L
O
O
T-
1
mn
O
O
r-.J
50
LTtrci....
i
i
U -
: ./ !
-__ jT3 _i
i
i
- 700
L
._ r; _ . iA
_Y
§* 100 p.
L
'
'
A ' ^P"
p&-H
\>--L^_i_l_—J^- +
i
i
j
j
r
r
440
O
O
r'"j
L
|
t
— . . }.... —
;
:
'_'
O
TTJ-
;
P
^ 150 _ •
VOLTAGE
CURRENT IN PERCENT
^j
. _
RPM
O
O
i/}
Lc _ U ^ - - U - L - _ !
1185
::iS^
j
i
:
1
1
U-y— — 1
I-D
!
!
t
HZ
RATED SPEED
i
I
L
^ 200
•
60
P
6
RATED CURRENT :
l
I
l_
1
_|
1
I
KW
STC- 4RPM164
J
i
i
;
1
L _ _ 1
i
I
I
CURVE NO.
SPEED-TORQUE & CURRENT
CURVE
.
1
1
1
i Li 1 i i i i !i i i i
L
L
L
.
L
L
1
1
I
1
1
i i i ! i i i i i i i i. 1 i i i i 1 i
7.0 30 40 50 60 70
SPEED IN PERCENT
flO
J- '-' f<
90 100
A: SPEED-TORQUE CURVE AT RATED VOLTAGE
B: SPEED-CURRENT CURVE AT RATED VOLTAGE
C: SPEED-TORQUE CURVE AT 65 % RATED VOLTAGE
D: SPEED-CURRENT CURVE AT 65 % RATED VOLTAGE
REV.
CONTENTS
DATE
DSN
CHK
APPD
2
1
0
RM-W230-091-1
ORIGINAL ISSUE
2004-06-23
S.M.LEE
Y.S .KIM
H.H.LEE
A4(210mmx297mm)
^T
A uvri »mm
THERMAL LIMIT & TIME CURREt
CURVE
A HYUNDAI
MOTORTYPE
:
HLA7634-64Y
1050
KW
CURVE NO.
TLC- 4RPM164
6
60
P
HZ
RATED TORQUE:
863.0
kg.m
RATED SPEED
:
1185
RPM
GD2 OF MOTOR:
160
kg.m2
VOLTAGE
:
440
V
GD2 OF LOAD
66.3
kg.nr
RATED CURRENT :
1648.0
A
:
1n
3
3j
2 !
•j
-l
I
H ,-, 2
i
H "^
M •
i^
\ i
\
i \i
'"«'"'%.
j
T"
1U
n,
^^
7
S
a
'
^_
»
'
•
ii
|
X
i!
-'
S
'
'•-; v
'
i\ %.
j
i V "V
S3
M
y
tlj
v
-.
B . .J
--—
(
i
'
}
l
i
} Z~~V
i
!
!
!
i
3
T
1
fl-r—
"N
•—r—-
1
1 >
\i
*•
c.
i
t
3i
1
NOTE :
REMARK.
!
1
i
\
\
\
\
1
1l Un -1 !| i i i i
1.0
I
H
~-.
i X
|
|
2.0
i i i i
i i i i
i i i i
i i i i
3.Ü
4.0
5.0
CURRENT IN P. U
i i i i
6.0
7.0
A: THERMAL LIMIT CURVE AT HOT CONDITION
B: THERMAL LIMIT CURVE AT COLD CONDITION
C: TIME - CURRENT CURVE AT RATED VOLTAGE
D: TIME - CURRENT CURVE AT 65% RATED VOLTAGE
REV.
CONTENTS
DATE
DSN
CHK
APPD
2
1
0
RM-W230-091-1
ORIGINAL ISSUE
2004-06-23
S.M.LEE
Y.S.KIM
H.H.LEE
A4(210mmx297mm)
1
MESSRS :
DAEWOO SHIPBUILDING & MARINE
ENGINEERING C O . , LTD
SHIP NO. : DSME / H4437-8 , H4441
TITLE :
SPECIFICATION
OF
THREE PHASE INDUCTION MOTOR
1050KW x 6P x 440V - STERN THRUSTER
.
/\H Y U N D A I
HEAVY INDUSTRIES CO., LTD
ELECTRO ELECTRIC SYSTEMS
FOR FINAL
APPROVED BY
K.J.KANG
CHECKED BY
2 05.09.12
"1
NO.
FOR FINAL
CHECKED BY
04.11.25
FOR WORKING
04.06.23
FOR APPROVAL
DATE
DESCRIPTION
K.S.KIM
CHECKED BY
CHANGE OF ALTERATION
DESIGNED BY
1 04.11.25
E
O.
DATE
RM-W230-049-3
K.S.KIM
—
REVD BY
CHKD BY
REVISIONS
K.S.KIM K.J.KANG
CLASS
CHKD BY
DATE
APPD BY
DWG. NO.
K.S.KIM
DNV
2004-03-12
APP - 4RPM164-166
A4(210mm x 297mm)
Y U N D A
I
DATA SHEET
RFQ. No.
Three Phase Induction Motor
Heavy Industries Co.. Ltd.
Project Name
DSME / H4437-8.H4441
Project No. 4RPM164-6
V
1050
KW 6
440
60 Hz
R A T I N G
Rev. No.
[ 0 ]
Item No.
Q'ty
1 Set/Ship
TECHNICAL DATA
GENERAL DATA
IEC.DNV
Rotor Type
SQUIRREL CAGE
~> ilicable Standard
AUTO T/R 65% TAP
Starting Method
s ignat ion of Driven Machine
STERN THRUSTER
1648.0
Rated
rame No.
630
Current
>e
Starting
600
HLA7 634-64Y
(*)
863.0
Rated
kg-m
closure-Protection Degree
TEAAC - IP 44
90
onstruet ion-Cooling Method
Torque
Starting
(*)
V10
- IC511
ocation
Break Down (*)
200
INDOOR
95.0
NON-HAZARDOUS.NON-SEISMIC
100 % Load
ea Classification
Efficiency
sulation Class
mp. RiseCResistance method)
75 °C
0.880
100 % Load
nt Temperature
45
Ititude
LIP TO 1000 METER
Power Factor
niditv
90
1185
r pin
tv-Service Factor
S2 / 1.0 (30 Min.) Rated Speed
2
66.3
COLD: 2 / HOT: 1 Load GD (**)
kg-m2
nber of consecutive starts
160
NEMA DESIGN B
Motor GD2
kg-m2
lectrical Design
Direction of Rotation
jupling Method
DIRECT
REFER TO OUTLINE D1VG
Location
of
Main
Terminal
Box
REFER
TO OUTLINE DWG
SINGLE
laft Extension
10 GY 8/4
ANTI-FRICTION
Paint Colour (Munsell No.)
Type
NU228M / 7322B
Motor Weight (Approx.)
5500 kg
aring
D.E / N-D.E No.
Lubrication
GREASE
Sound Pressure Level - mean value,
'ternal Thrust
NOT APPLICABLE
- dB(A)
measured at 1 meter distance from mo-
E
ACCESSORIES
Vibration
Witness Test
) WINDING TEMP. DETECTOR (PT 100 ohm):2EA/PHASE
HEATER : 220V, 630W, 1 PRASE
3.8 mm/sec. (Peak)
DNV
SUBMITTAL DRAWING
*** SPARE PART ***
) BEARING (NU228M+7322B) 1 SET / SHIP
Rs = 0.82%, Rr = 2.68%. Xm = 16.61%
Starting Power Factor : 22.2 %
Starting Current at Auto TR 65% TAP : 4177.7 A
Starting KVA at Auto TR 65% TAP : 3183.8 KVA
tote : Others not mentioned in this specification
shall be in accordance with HHI standard.
Above technical data are only design values and shall
be guaranteed with tolerance of applicable standard.
I-W230-119-1
(*) : Value at f u l l voltage starting.
OUTLINE DIMENSION DRAWING NO.
MAIN TERMINAL BOX DRAWING NO.
ACC'Y TERMINAL BOX DRAWING NO.
ACC'Y T/B WIRING DIAGRAM AIVG. NO.
GENERAL ASSEMBLY DRAWING NO.
MAIN NAME PLATE DRAWING NO.
SPARE PART LIST DRAWING NO.
HM-070571
3M-045160
3M-025056
4M-047000
1M-000810
4M-052647
4M-056187
Checked
Checked
Approved
K.S.KIM
K.J.RANG
Date
Prepared
K.S.KIM
20040623
(**) : Referred to Motor Shaft
A4(210mm X 297mm)
ACC'Y T/BOX
B-PF2 1/2/
/(GLAND
l'-PF1/2s\
ZyPFI 1/4\
GLÄN.D 15c,30b/
AIR OUTLET
O
in
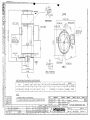
THREE PHASE INDUCTION SQUIRREL CAGE ROTOR MOTOR
TYPE
HLA7 634-64Y
OUTPUT
1050 KW
POLE
VOLTS
6P
440 V
FREQ.
60 HZ
PROT.
INS CLASS
SYN. RPM
IP44
F
1200 RPM
BEARING
MOUNT TOTAL WEIGHT
V 10
5500 KG
N-D.E
D.E
NU228M
7322B
NOTE
W
505
I2.5S
1. EXTERNAL THRUST : NOT APPLICABLE
Q'TY
2. THIS MOTOR IS DESIGNED TO BE OPERATED IN ARROW DIRECTION.
APPD BY
UNIT
CHKD BY
SCALE
NON SCALE
PROJEC'N
3 Ttt(3rd Angle)
2004-05-23
3.2S
WW
0.4S
DESCRIPTION
CHKD BY
DSND BY
REV. OF OWNER COMMENT
REV. OF ROTATION (C.W -> C.C.W)
REV
DATE
CONTENTS
K. S. KIU
v S. KIM
K. J. KANG
REVDBY CHKD BY CHKD BYi APPD BY
KIM KWANG SOO
MATERIAL
DATE
SUBJECT
A HYUNDAI
*-
^>
HEAVY
DIMENSION
INDUSTRIES CO., LTD.
WEIGHT
PART NO.
REMARK
HLA7 634-64Y
NO.
«(1:20)
TITLE
OUTLINE DIMENSION DWG.
REF. NO
DWG NO
Sheet No.
HM-070571
Revision No.
of
2
23
22
21
20
9
1 GREASE DRAIN ASSY
CREASE SUPPLY ASSY
CREASE DRAIN ASSY
GREASE SUPPLY ASSY
MILD STEX {SS4OO)
MILO STEt (SS400)
END COVER ASSY
UILDSTH <SS400)
FAN COVER ASSY
MILD SIEE (SS400)
7
6
~T
OUTER FAN ASSY
END SHIELD ASSY(N-O£ StOE)
BEARING ASSY(N-D.E SIDE)
END SHIELD ASSY(Di SIDE)
U1LDSTEE (SS400)
BEARING ASSY(D.E SIDE)
FIXINQ SUPPORT ASSY
MILD STCE (SS400)
AR GUIDE ASSY
INNER FAN A£SY(N-D.E SDE)
ULD SIG (SS400)
INNER FAN ASSY|D.C SIDE)
UlLDSTCI (SS<00)
ROTOR BAR ASSY
CU
ROTO« CORE ASSY
FORGING'. IEEL.
3
STATOR COIL ASSY
STATOR CORE ASSY
^Ti
WLDSTEE (SS400)
WEIGHT
OTT
APPD BT K. J. KANC
CHKD BY K. S. KIM
PROUEC"N J rt Angl«
DSHD BY KM KIMNC SCO DATE
/HYUNDAI
REVD BY
CHKO ttt APPO BY
*
i
EUCTRCAi. ENGINEERING co.. im
PART NO.
NO.
HLA7.(V10)
GENERAL ASSEMBLY
Slmt No.
1M-000810
li —
R«vl«lon No.
of
O
s
660
700
¥
TERMINAL BOX COVER
550
+• H- +
-t- I—t+ + +
+ + + + + +
+ + + + •• +
at
MAIN POWER TERMINAL
X
4i-
EARTH TERMINAL
"
4"
o
Q
in .
1
8-PF2 1/2"
173
173
OQ
zco
130
il
MAIN POWER CABLE GLAND : 8-55a
I VIEW "Z'l
0.5
OQ
600
CABLE GLAND ARRANGEMENT AREA
a:
^
REV
DATE
CONTENTS
2
REVO BY CHKD BY|Q.P CHK APPO BY
m.
DESCRIPTION
QTY
MATERIAL]
APPD BY
K.J. KANO
UNIT
Q.P CHK
K. S. KIM
SCALE
CHKD BY
DSND BY
KIM KWANG SOO
| WEIGHT |
PART NO.
* ELECTRICAL ENGINEERING CO., LTD.
|
REMARK [NO.
CAOPROJ <\F1LE t
SUBJECT
NONE
TITLE
PROJEC'N 3 «M(3rd Angle)
DATE
2003.02.18
A HYUNDAI
*•
DIMENSION
MM
| T-BOX-M\3ft045160
TERMINAL BOX ASSEMBLY
REF. NO
DWG NO
Sheet No.
3M—045160
I
Revision No.
9
of
0
IS.
TO
o
Ul
en
01
to
To
•L
g
§
3
I
R
CO
OD
O
X
O
THIS DRAWING IS PROPRIETARY TO HHI. NO PART OF THIS DRAWING
MAYBE REPRODUCED WITHOUT THE PERMISSION OF HHI.
Ø
D 240
©@©
HYUNDAI
O
O
_HEAVT INDUSTRIES CO.. LTP.
w'
o'
•vi
O
O
l
O
rr
(D
(D
Ol
fo
CD
o
o
>
ö
M
S
>
o
c/>
o
o
o
cn
X
'S.
a
?
O4
-l
Q.
o
?
o
x'
o
o
o
o
OJ
i5
-H
T!
^
>
z
o
o
^
z
en
d
ro
m
S
<D
z
01
m
ro
(/)
£,
o
3
IT
o
o
o
O)
OJ
N3
b)
Ol
\
OJ
OJ
ro
OJ
OJ
o
rr
O
O
OJ
cn
Ul
M
cn
K)
M
NJ
OJ
K)
O
O
T)
l
OJ
ro
OJ
M
,, „o wlv,,.,,,o ,0 , ROPRIETARYTO HHI.^.y PART OF THIS DRAWING
MAYBE REPRODUCED WITHOUT THE PERMSSION OF HHI.
HEAVY INDUSTRIES
-SH12
-SH11
-WT42
-WT43
-WT51
-WT52
FOR WINDING TEMP. TRIP
-WT53
-WT61
-WT62
-WT63X
-WT4K
-WT12
-WT13
-WT21
-WT22
FOR WINDING TEMP. ALARM
-WT23
-WT31
-WT32
-WT33X
-WT1K
l\r
8*1
C/)
ro
CO., LTD.
04
l
33
(t
<
cn
Ul
o
(
f
5
o
m
-Q
NJ
r°
b
KJ
O
O
o
(/>
o
o
5
O
O
O
c
CO
03
ion
o
m
T)
m
O
o
m
oo
o
T
m
o
OISN
o
in
ERIA
CO
o
uo
c
>
m
o
o
±
O
Cn
5
O
_
m
2 >
m
O
0
«i
m
o
•a
m O
0
_L
c
co
O
XI
(n
M
XI
XI
m
_L
TlWuRAWING IS PROPRIETARY TO HEECO. NO PAR^)F THIS DRAWING
MAYBE REPRODUCED WITHOUT THE PERMISSION OF HHI.
o
o
HEAVT INDUSTRIES CO., LTD.
HYUNDAI
HEAVY INDUSTRIES CO., LTD.
riYUrauui
1
2
l
I
3
4
SPARE PART LIST FOR INDUCTION MOTOR
G
G
1400KW x 6P BOW THRUSTER
SPEC
QUANTTITY
ITEM
NO
NAME
OF
PARTS
OUTLINE
WORKING
PER
MOTOR
DIMENSION
F
—-
|l[Dl
SPARE
REMARK
PER
PER
SHIP
SHIP
F
40
~~~
_|_
BALL
1
P
K
**•
|
BEARING
0
n
1
0
1
#622603
1
CM
^
E
E
M^1
iij
-\5° h
TN"
HJ *T
ANGULAR
CONTACK
BALL
BEARING
2
J>
Z
D
1
:e
d
0
o o
CM
1
#73226
1
D
Q
n
NG IS PROPRIETARY TO HHI.iKJ PARI Oh IH
RODUCED WITHOUT THE PERMISSION OF HHI.
1
T™
C
C
B
B
DESCRIPTION
Q'TY
DIMENSION
MATERIAL
WEIGHT
PART NO.
CO
US
APPD BY
K. J. KANG
UNIT
MM
CHKD BY
K. S. KIM
SCALE
N/S
PROJEC'N
3*TO(3rd Angle)
DATE
2004.06.23
A CHKD
Dl
DSND BY
KIM KWANG SOO
A
1
«;iiR.iFrrr
1
BRG-AS02\4R056186
DWG NO
I
A
SPARE PART LIST
Sheet No.
REF. NO
HEAVY INDUSTRIES CO.. LTD.
INDUSTRIAL Se. POWER SYSTEMS
2
CAD PROJ * \ FILE t
T-l-Pl 1-
A HYUNDAI
f.
NO.
REMARK
3
4M-056186
I
4
Revision No.
of
0
.
'
AHYUNDA
MOTORTYPE
:
CURVE NO.
SPEED-TORQUE & CURRENT
CURVE
HLA7 636-66Y
1400
KW
6
STC-
4RPH093
P
60
HZ
RATED TORQUE:
1148.8
kg.m
RATED SPEED
:
1187
RPM
GD2 OF MOTOR :
275
kg.m2
VOLTAGE
:
6600
V
GD2 OF LOAD :
89.0
kg.ni2
RATED CURRENT :
146.5
A
T.nn r^
_.
juu
!
1
L
1
i
9*>o £7u
/.•Jv
1
1
1
1
.
U
1
1
1
L
1
1
.
i
L
L
1
1
1
1
1
1
Ijy
i
l
1
!-D
1
I
L
!
I
1
I
L
1
I
1
I
L
1
!
- 700
L
-ij
L.
1
1
i
j
|
|
j
-
!
,
,
.y
H 500
r
f-
f>° i
I
1
te
M
i i i L l i i Å
É
sJ
r - —
f~
\-
tj
§
i
NOTE :
!
! __^_J--^"
1
!
|
i
!
!C__^
L
L
L
L
!
1
1
1
!
1
1
1
L
20
\
i
!
!/
!
1 1 1 1 1 1 1 1 1 1 ! 1 1 1 1 1 1 1 1 l_.
10
JrS
i
/
^"i
L
L
1
i
1 1 1 ! 1 1 1 L.
L
L
l
1
flO
1
0
90 100
1 1 1 1 1 1 1 1 LJ L 1
30 40 50 60 70
SPEED IN PERCENT
0
0
!
o
LU. l
i
T-
A
f
!7\
o
L
c——
i
1_ !
!
RH U
vMJ
[J
i
Ll
O
K^_
1
l
: / ^
D-J
g
!
~
!
i
Q
E
^*
nn ~
i^ 1l Uw
;
o
g
ID ;
KJ
r
i-
:
ßV PERCENT
^ 1 50 !
I
A: SPEED-TORQUE CURVE AT RATED VOLTAGE
B: SPEED-CURRENT CURVE AT RATED VOLTAGE
C: SPEED-TORQUE CURVE AT 65 % RATED VOLTAGE
D: SPEED-CURRENT CURVE AT 65 % RATED VOLTAGE
REMARK.
REV.
CONTENTS
DATE
DSN
CHK
APPD
2
1
0
RM-W230-091-1
ORIGINAL ISSUE
2004-06-23
S.M.LEE
Y.S .KIM
H.H.LEE
A4(210ninix297nmi)
T
A HYUNDAI
A
™ ™*
c TIME CURRENT
VT
^
MOTORTYPE
:
1400
HLA7 636-66Y
KW
6
CURVE N0
"
TLC- 4RPH093
60
P
HZ
RATED TORQUE:
1148.8
kg.m
RAJED SPEED
:
1187
RPM
GD2 OF MOTOR:
275
kg.m2
VC)LTAGE
:
6600
V
GD- OF LOAD
89.0
kg.m2
RßiTED CURRENT :
146.5
A
:
1M n,' ' n . •
H3 .ji
å- i
,
i
l
[
i
i
i
1
i
i f~\ 2
\
i
j
i
, .> ^\.
'•
:
H =,
*„
-J
-
5i
*i
N.
\
\
'
t
vx i
._ i x x „ _ .
i
"V
! "~v.
s^
:
m
|1J
n~" •
B^;
^^
N
"
"":
!
1
;
1
1
i
-
-_
H
[
!
i
!
i
;
1 ^^-.~~"~--^ R
i
1i \A
—it
'" •
*
1J i
1
1
3
!
—•u""~"—^. i
,f
1
-
J
i
^
Sv_
1
i
1
J
.
i
*~-^f. '
c , \=t=
\
Q
l
j
i '^--.. """--"H^
^
^
rTi
•
i
n!
-\
\
j
\
i
\
j
1| U
n -1
i l 1 i
1.0
i i i i
2.0
3.0
i i i i | i i i i | i i i i | i i i i
4.0
5.0
6.0
7.0
CURRENT IN RU
NOTE :
REMARK.
A: THERMAL LIMIT CURVE AT HOT CONDITION
B: THERMAL LIMIT CURVE AT COLD CONDITION
C: TIME - CURRENT CURVE AT RATED VOLTAGE
D: TIME - CURRENT CURVE AT 65% RATED VOLTAGE
REV.
2
1
0
RM-W230-091-1
CONTENTS
ORIGINAL ISSUE
DATE
2(J04-06-23
DSN
S.M.LEE
CHK
Y.S.KIM
APPD
H.H.LEE
A4(210mmx297mm)
CONTENTS
1. INSTRUCTION MANUAL
FOR THRUSTER CONTROL SYSTEM
BOW & STERN
2. REMOTE CONTROL SYSTEM
THRUSTER
3. HYD. PUMP STARTER &
TCT-220
LOCAL CONTROL BOX
4. SPARE PARTS & TOOLS LIST
4-1. ELECTRIC PART
5. NOTE
KTE - ü NAKASHIMA
KTE CO.,LTD.
MECHATRONICS DIVISION
w w w .kte.co .kr
INSTRUCTION
MANUAL
(VER
1.1)
KT - TCS
Thruster Control System
August 2005
KTE
KTECa,LtcL
1497-11. Songeong-Dong, Gangseo-Gu,
Busan 618-270, Korea
Tel: +82-51-265-0255 Fax : +82-51-265-0250
KTE
USER'S MANUAL OF
Thruster Control System ( KT - TCS )
-Contents1. Introduction
1.1. Use
1.2. Basic specifications
2. System construction
2.1. The whole system construction
2.2. Terminal block diagram (1)
2.3. Terminal block diagram (2)
2.4. Terminal block diagram (3)
2.5. Hardware construction
3. Main functions
3.1. Auto blade angle control (follow up)
3.2. Change control position
3.3. Manual control
3.4. Auto load control
3.5 Communication and analog output for VDR
4. System operations
4.1. Adjusting command value
4.2. Adjusting feedback value
4.3. Setting parameter
5. Layout drawing
5.1. Front panel
5.2. External diagram
6. Operating flow charts
6.1. Normal operation
6.2. Change control position
6.3. Auto load control
7. Parameter adjust unit
7.1 LCD display
7.2 Explanations for each key
7.3 Changing over to another address
7.4 Changing value of each parameters
# Appendix : system parameter
KTE CO., LTD.
REV
PAGE : 2
OF 43
DOCU. NO :
KTE
USER'S MANUAL OF
Thruster Control System ( KT - TCS )
REV
PAGE : 3
OF 43
DOCU. NO :
1. Introduction
1.1. Use
This manufacture is a private controller of the thruster which is used when a
ship enters or leaves a port, the main functions of the manufacture are to detect
control input, feedback value, and to control blade angle of the thruster with the
most optimal condition by follow up control algorithm
Control command is done by port wing, stb'd wing as well as W/H, and the
action is done with the command of related control position, which can be
changed simply by operating a button.
Each parameter which is necessary to control can be identified and changed
with parameter setting equipment.
1.2.
Basic Specifications
1.2.1. Main control panel ( Bow / Stern )
1) Standard specifications
- Supply voltage : DC 24V
- Current : 3A
- Temperature range : Ot: ~ 70 °C
- Output contact : 10A ( 250VAC ) for magnet contact
2A ( 30VDC ) for signal output
2) Main control board
- 8 bit micro-controller
- Digital dimmer
3) Input specifications
- Digital input : 20 channel
- Analog input : 7 channel
- Control dial : potentionmeter 2K ohms
KTE CO., LTD.
KTE
USER'S MANUAL OF
Thruster Control System ( KT - TCS )
REV
PAGE : 4
DOCU. NO :
4) Output specifications
- Indication lamp
• For alarm : 12
• For information •' 7
• For indication : 9
• For pitch : bar Indication
• For current : decimal (with pitch indicating by mode switch)
- Contact output : 2 channel ( for S/V operation )
13 channel ( for signal output )
- Alarm contact output :
• System failure contactor.
• Power failure contactor.
- Analog output
• 2 Channel ( for wing analog meter )
- For VDR (Voyage Data Recorder)
• Command signal : -10V ~- -MOV
• Feedback signal : -10V ~ +10V
• Thruster run signal : On/Off contactor
• RS-485 communication
1.2.2. Wing control panel ( Bow & Stern )
1) Input specifications
- Digital input : 2 channel x 2
- Analog input : 2 channel x 2
- Control Dial : Potentiometer 2K ohms x 2
2) Output specifications
- S/W output : 2 channel ( for signal output ) x 2
- Analog output : 1 channel ( for command ) x 2
KTE CO., LTD.
OF 43
KTE
USER'S MANUAL OF
Thruster Control System ( KT - TCS )
3) Indication lamp
• For alarm : 3 x 2
• For information : 1 x 2
• For indication : 1 x 2
• For pitch : bar Indication x 2
• For current : ammeter Indication x 2
KTE CO., LTD.
REV
PAGE : 5 OF 43
DOCU. NO :
KTE
USER'S MANUAL OF
Thruster Control System ( KT - TCS )
REV
PAGE : 6
DOCU. NO :
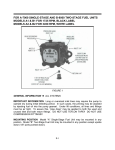
2. System construction
2.1. The whole system construction ( Bow / Stern )
W/H PANEL
PORT WING
&SB
Terminal Board A,B
ENGINE ROOM
KTE CO., LTD.
OF 43
KTE
2.2.
USER'S MANUAL OF
Thruster Control System ( KT - TCS )
Terminal block diagram (1)
- Bow
KTE CO., LTD.
REV
PAGE : 7 OF 43
DOCU. NO :
KTE
USER'S MANUAL OF
Thruster Control System ( KT - TCS )
REV
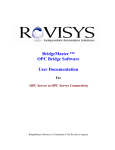
2.2. Terminal block diagram (1)
- Stern
w
r*
u
AC220V 60Hz #1(3A)
CONTROL POWER SUPPLY '
OC24V (M)
BMTERY POWER SUPPLY
TERMINAL BOARD A
3
rå
La Ilif
TB2A
TB2
SSP
SSP
ssc
sss
ssc
sss
—
«-sp
c"
ȣ*
ftffi | EMSW ~|5
STT m, -c P
ai
—
1
!?
TB3
Rc
sro
•x>L
SNO
SPO Ir, LOCAL
SNO J"STAnOI4
sw
SA1
SU
>
e- SUE1
SUE2
SUEZ
EUW STOP
0^
SUE4
IB5
35
ii r
]
/ J-TI
SW1 tiov
SJJ
SW1 ±1<V
1—
sue
sue
1
J
COMI
SU3
-Q KHOKWPRÜN
SU3 -Q IWUSTDt RUN
SUS -Q READY 10 START
sus
SU« -aPOWCHAWIW«
sue
r^
SUB
SEC
SE*
SEC
SE3
SES
SES
1—
COINON
SEC
11
._ SO
J
-O Hra
PUMP U» PRESS.
-Q HEADI9t WK UM Urø.
—D **** UOroN OVERLO«
-n H«. RJUP crauwo
SE3
-D "** MOTOR
-O u** MOTOR
SE7
START FHL
STARTER ÅBN.
MOTOR «MMO
"^ TEUP MM
8«-<3
I
I
^
"P
p
^
(_<—f f
J|
-i
se«
SE»
n
11
-
3
^
"^
>
g
E
ov
s« •<_»-
,— .
tiw
L
S-0
/j=».
son ±1W
<—f^ff
ov
SCR2
L
*L
sji
S
r
SVR2
SJ>
-^
j <—(
S
^"^
SAUI
~t_f-
Æ
+15V "
SFt
sn
SF3
ST*
5FE
Sf2
5T3
SF4
-15V
W
F.G
SFE
E
S
TB4
SN1
SN1
SN2
SN2
SPI
SPI
SP2
SP3
SP3
SP4
SP4
SPS
SP9
SM
BUOCANOZ
NEUTRAL
TWU5TER «M
ft
TWU5TER STOP
Q
KUXPUIP RUN
HttMIP STOP
5
ROW BOATO
KTE CO., LTD.
PAGE : 8
OF 43
DOCU. NO :
KTE
2.3.
USER'S MANUAL OF
Thruster Control System ( KT - TCS )
REV
Terminal block diagram (2) - ( Bow / Stern )
TER WINAL BOARD B
1'B6
+24V
BTB1
r
1A
ov
1A
-n
n-
—1^ CON. STATION
THRUSTER ÅBN.
-a
M/U OVERLOAD
-d
T)
HYD.PUMP STOP
-a
S
THRUSTER RUN
BUZZER STOP
TJ
O
3
f
58
-
148
6A
•
8A
F.G
9A
- 11A
F.G
98
- 118
BUZZER f
°~
PITCH
T
L
IND.
o
^
—TBzl BUZZER
-i
}-a
i
°
O
i
•M5V
SIG
-15V
OV
Ml
1I
m
r~
J
)^-k
AMMETER [
11A
EM'CT STOP
- ISA
- 16B
11B
44i
B7
+24V
^i
—«S-o
BTB1
IA
-
1A
2B
-
48
38
- 5B
OV
-d
STAT. IND. Jt-T"
nU/U OVERLOAD
HYTXPUMP STOP
THRUSTER RUN
BUZZER STOP
21
S
PITCH
IND.
1
-••^ CON. STATION
-a
THRUSTER ÅBN.
SÅ
» 14A
58
- 14B
T
L
—G
iq
-a
-n
CD
°
~*n
—fBZlBUZZER
^
s
0
O
+15V
SIG
-15V
"
OV
AUMETER
F.G
9A
F.G
9B
£
EU'CY STOP
10B
113
- 11A
- 11B
"ri—Å
Ml
S
- 128
rH
- 168
æ1
4é BNR2
f
BNR1
BAB<
BAB2
KTE CO., LTD.
"Z.
m
r~
PAGE : 9 OF 43
DOCU. NO :
USER'S MANUAL OF
Thruster Control System ( KT - TCS )
KTE
REV
PAGE : 10 OF 43
DOCU. NO :
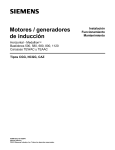
2.4. Terminal block diagram (3) - ( Bow / Stern )
~Tw/H
POWER SUPPLY
(EWS150-24)
+S +V -V
Ø
DC24V OUTPUT
-S ACG L
N
Ø
AC220V INPUT
AEMSW
REU\Y BOARD
TB3 (36P)| |TB4 (36P)| |TB5 (20P)|
KTE CO., LTD.
CONTROL PANEL
KTE
2.5.
USER'S MANUAL OF
Thruster Control System ( KT - TCS )
REV
PAGE : 11 OF 43
DOCU. NO :
Hardware construction
2.5.1. Main control panel
1) CPU board :
This board uses 8-bit micro-controller in order to control digital input,
digital output, and analog in/out. This is composed of CPU, memory, etc.
2) Analog board :
This board is composed of hybrid. IC, analog input circuit, this includes
volume resistors to tune offset and gain for 5-channel analog inputs.
3) I/O board :
This is for digital input/output. It is consist of relay and etc.
4) Display board :
This board is located in front of the case, and composed of various
indication lamps, buttons, dial for command input, blade angle indicator,
ampere meter, etc.
5) Mother board :
This board is connected with CPU board directly. This is supply DC power
to system.
KTE CO., LTD.
KTE
USER'S MANUAL OF
Thruster Control System ( KT - TCS )
REV
PAGE : 12 OF 43
DOCU. NO :
2.5.2. Wing control panel
1) Display & mother board :
This board is located in front of the case, and composed of various
indication lamps, buttons, dial for command input, blade angle indicator,
ampere meter, etc.
KTE CO., LTD.
KTE
USER'S MANUAL OF
Thruster Control System ( KT - TCS )
REV
PAGE : 13 OF 43
DOCU. NO :
3. Main functions
3.1. Auto blade angle control (follow up control)
Main function of this system is to control blade angle with command value.
That is to say, this system controls blade angle automatically with command,
when follow up control algorithm is used. If feedback value becomes close to
command value, this system doesn't transmit S/V control signal constantly, but
pulse signal with constant time interval, and feedback value can reach the
objective value quickly without overflowing command value. Users have to set
parameters with parameter setting equipment in advance, and it is possible to
set parameters properly per characteristics of every ship.
The kinds and contents of related parameters are as follows.
- Follow up start gab : data to decide starting point of follow up control
(Starting point of follow up control = command value - follow up start gab)
- Follow up S/V on time : when follow up control, S/V active time
- Follow up S/V off time : when follow up control, S/V inactive time
- Dead band zone : if each parameter and data are in this range when they
are compared, they are regarded as same values,
(applied items : neutral, command & feedback, command
change over comparison)
All parameters can be identified and changed with parameter setting eqipment,
and operating method for parameter setting equipment can be referred in
another manual.
KTE CO., LTD.
KTE
USER'S MANUAL OF
Thruster Control System ( KT - TCS )
REV
PAGE : 14 OF 43
DOCU. NO :
1) Interval time chart (when P1 is compatible)
Command position
Time
P1
P1 : follow up start position (= command position - follow up start gab)
2) Interval time chart (when P1 is too long)
Command position
Pitch
i ime
n
SN ON
S/V OFF
I
Time
T2 IT1
P1
T1 : When follow up control, S/V active time
T2 : When follow up control, S/V inactive time
P1 : follow up start position (= command position - follow up start gab)
KTE CO., LTD.
KTE
USER'S MANUAL OF
Thruster Control System ( KT - TCS )
REV
PAGE : 15 OF 43
DOCU. NO :
3) Interval time chart (when P1 is too short)
Command position
Time
PI
P1 : follow up start position (= command position - follow up start gab)
KTE CO., LTD.
KTE
USER'S MANUAL OF
Thruster Control System ( KT - TCS )
REV
PAGE : 16 OF 43
DOCU. NO :
3.2. Change control position
1) Change position from W/H to wing
Position can be changed to wing by pushing "CHANGE OVER" button in wing
control panel. If once button is pushed, wing control station lamp in W/H
control panel starts flickering, and buzzer starts ringing in the form of pulse,
when command value of wing control panel corresponds with feedback value,
control position is turned to wing completely and wing control station lamp
becomes steady state.
Moreover, if W/H control station button is pushed in flickering state, then all
motions are canceled and return to previous state.
Process of the motions is as follows
CONDITION
ACTION
W/H
WING
- Command :
Port 7.0
- Command :
Zero
- Position :
Port 7.0
- Push on
wing control
button
- W/H : Flickering wing lamp
- Wing : Flickering wing lamp &
buzzer on
- Push on
W/H control
button
- W/H : Wing lamp off
- Wing : Wing lamp off &
buzzer off
Cancelled
- W/H : Flickering wing lamp
- Wing : Flickering wing lamp &
buzzer on
- Push on
wing control
button
- Command :
Port 7.0
REMARK
FEEDBACK
- Position :
Port 7.0
KTE
- W/H : W/H lamp off
- Wing : Wing lamp go to steady
& buzzer off
CO., LTD.
Ack.
KTE
USER'S MANUAL OF
Thruster Control System ( KT - TCS )
REV
PAGE : 17 OF 43
DOCU. NO :
2) Change position from wing to W/H
To change control position from wing condition state to W/H is equal to
previous one, and process of the motions is as follows
CONDITION
ACTION
W/H
WING
- Command : - Command :
Zero
Port 7.0
- Position :
Port 7.0
- Push on
W/H control
button
- W/H : Flickering W/H lamp &
buzzer on
- Push on
wing control
button
- W/H : W/H lamp off &
buzzer off
- Push on
W/H control
button
- Command :
Port 7.0
REMARK
FEEDBACK
Cancelled
- W/H : Flickering W/H lamp &
buzzer on
- Position '•
Port 7.0
- W/H : W/H lamp go to steady
wing lamp off &
buzzer off
- Wing : wing lamp off
KTE CO., LTD.
Ack.
KTE
USER'S MANUAL OF
Thruster Control System ( KT - TCS )
REV
PAGE : 18 OF 43
DOCU. NO :
3.3. Manual control (Non-follow up control)
In this system, blade angle can be basically controlled by means of
recognizing angle that users input with CPU and controlling automatically with
follow up control algorithm, and another operation isn't necessary.
But, users must operate manually in case of not being controlled automatically
because of difficulties in CPU or related components, for manual operation,
users must pull Non-follow button in W/H control panel, when all control signals
transmitted from CPU board are blocked forcedly and users can control directly
with the button below control dial
3.4. Auto load control
This is for protecting overload in follow up operation, and controlled
automatically by PI control depend on ALC set point.
If main motor actual load is more than preset load in follow up condition, the
blade angle is automatically reduced to the angle of preset load.
Current
ALC
set point
Time
SA/ Activated
KTE CO., LTD.
KTE
USER'S MANUAL OF
Thruster Control System ( KT - TCS )
REV
PAGE : 19 OF 43
DOCU. NO :
3.5. Communication and analog output for VDR
In this system, there are communication port(Serial / RS-485) and 2 analog
output, 1 digital output.
• Command signal : -10V ~ +10V
• Feedback signal : -10V ~ +10V
• Thruster run signal : on/off contactor
• RS-485 communication
KTE CO., LTD.
USER'S MANUAL OF
Thruster Control System ( KT - TCS )
KTE
REV
PAGE : 20 OF 43
DOCU. NO :
4. System operations
4.1. Adjusting command value
In this system, 3 command values transmitted from W/H, port wing, st'bd wing
are used, each input value is voltage value transmitted from potentiometer
located in the inside, and converted into digital value by A/D converter.
A/D converter provides 12-bits resolution, and -10V—+10V voltage range
basically corresponds to 0 — 4095 digital value, but, there may be a few
differences due to position of potentiometer or variable resister value of circuit.
Therefore, zero and min/max value should be set in advance by means of
adjusting position of potentiometer and offset, gain resister of circuit.
Data which should be set in advance in relation to command input are position
of control dial (potentiometer), voltage, A/D conversion value, and angle. Values
set for each item and allowed tolerance of error are as follows
No
Control dial
Voltage
A/D Count
Angle
1
Port max. position
-10 V
0-10
up to 30.0°
2
Zero position
0 V
2043 ~ 2053
0
3
St'bd max. position
+10 V
4086 ~ 4095
up to 30.0°
The methods to set data are as follows
-
Stick prameter setting equipment on control unit, and input maximum angle.
Set address for parameter setting equipment to indicate A/D count value.
Put the position of control dial to port max. position
Adjust offset, gain, position of potentiometer for A/D count to be in
tolerance.
In the same way, set zero position and st'bd max. position
Set address for parameter setting equipment to indicate angle.
Identify position and angle of control dial
Save A/D count value to the address of parameter setting equipment
KTE CO., LTD.
USER'S MANUAL OF
Thruster Control System ( KT - TCS )
KTE
REV
PAGE : 21 OF 43
DOCU. NO :
4.2. Adjusting feedback value
Adjusting feedback value is equal to that of command, and 2 positions for
data identification are added in order to heighten accuracies of data.
No
Control dial
A/D Count
Angle
01
Feedback PORT 25
0-20
Port 25 degree
02
Feedback PORT 20
309 ~ 419
Port 20 degree
03
Feedback PORT 15
809 ~ 829
Port 15 degree
04
Feedback PORT 10
1218 ~ 1238
Port 10 degree
05
Feedback PORT 5
1628 ~ 1648
Port 5 degree
06
Feedback Zero
2038 ~ 2058
Zero
07
Feedback STBD 5
2447 ~ 2467
STBD 5 degree
08
Feedback STBD 10
2857 ~ 2877
STBD 10 degree
09
Feedback STBD 15
3266 ~ 3286
STBD 15 degree
10
Feedback STBD 20
3676 ~ 3696
STBD 20 degree
11
Feedback STBD 25
4075 ~ 4095
STBD 25 degree
4.3. Setting parameter
Parameters in this system are saved at the memory in W/H control panel, and
loaded when power is supplied initially, setting and identifying each parameter
are accomplished with another parameter setting equipment.
Refer appendix if you want to know the kinds and contents of parameters in
system.
KTE CO., LTD.
KTE
USER'S MANUAL OF
Thruster Control System ( KT - TCS )
REV
PAGE : 22 OF 43
DOCU. NO :
5. Layout drawing
5.1. Front panel
1) W/H control panel ( Bow )
BOW
©
©
THRUSTER CONTROLLER
.©
©
KTE CO., LTD.
KTE
USER'S MANUAL OF
Thruster Control System ( KT - TCS )
PAGE : 23 OF 43
REV
DOCU. NO :
5. Layout drawing
5.1. Front panel
1) W/H control panel ( Stern )
[ STERN
©
©
THRUSTER CONTROLLER
EM'CY STOP
MAIN MOTOR
PO
SO
-{com. STATION)-
o
£
FDUm
-f
BLADE ANGLE INDICATOR
PORT
10
STBD
5
0
]D
10
PORT
OFF
10
5
^
10
ST'BD
I ON l l PIHM .
laial
- MNAKASHIMÄJ
.©
©
KTE CO., LTD.
KTE
USER'S MANUAL OF
Thruster Control System ( KT - TCS )
REV
PAGE : 24 OF 43
DOCU. NO :
2) Wing control panel
- port wing
o
o
o
o
o
o
O
c
c/)
H
m
o
O
o
o
o
=•!
o
o
KTE CO., LTD.
o
I—
f—
m
O
O
KTE
USER'S MANUAL OF
Thruster Control System ( KT - TCS )
REV
PAGE : 25 OF 43
DOCU. NO :
- Stb'd wing
o
o
o
O
o
O
O
o;
kJ
o
o
o
o:
Lu
c/)
Z)
o er
i
O
o
= !•=
o
O
KTE CO., LTD.
O
o
KTE
USER'S MANUAL OF
Thruster Control System ( KT - TCS )
REV
PAGE : 26 OF 43
DOCU. NO :
5.2. External diagram
1) W/H control panel ( Bow / Stern )
-THRUSTER CONTTOUfR
ANALOC BOARD
CPU BOARD
I/O BOARD
< FRONT VIEW >
' < SIDE VIEW >
MOTHER BOARD/
POWER
SUPPLY
< BOTTOM VIEW >
KTE CO., LTD.
LL
0
£
••
0
O
ü
LU Z>
<£
CL Q
LU
GC
CO
O
11
E
"g
H
LL .22
O
_J CO
=)
"Z.
*^ "c
o
2E O
CO i—
DC "oo
LU
CO rID
LU
H-
A
ÜJ
et:
<
Lu
er
v
KTE
USER'S MANUAL OF
Thruster Control System ( KT - TCS )
REV
PAGE : 28 OF 43
DOCU. NO :
2) Wing control panel ( port )
Gaf
< FRONT VIEW >
< REAR VIEW >
KTE CO., LTD.
< SIDE VIEW >
KTE
USER'S MANUAL OF
Thruster Control System ( KT - TCS )
6. Operating flow charts
6.1. Normal operation
Feedback Value
> Command ?
Feedback Value
< Command ?
KTE CO., LTD.
REV
PAGE : 29 OF 43
DOCU. NO :
KTE
USER'S MANUAL OF
Thruster Control System ( KT - TCS )
6.2. Change Control Position
Feedback Value =
Wing Command ?
KTE CO., LTD.
REV
PAGE : 30 OF 43
DOCU. NO :
KTE
USER'S MANUAL OF
Thruster Control System ( KT - TCS )
6.3. Auto load control
Actual Current
ALC set point
KTE CO., LTD.
REV
PAGE : 31 OF 43
DOCU. NO :
KTE
USER'S MANUAL OF
Thruster Control System ( KT - TCS )
REV
PAGE : 32 OF 43
DOCU. NO :
7. Parameter adjust unit
7.1 LCD display
1) Setting parameter mode
> S[00] : 00000
S[01]
: 00000
S[02]
: 00000
No :
-
"
"
"
"
"
"
DATA :
> " : Cursor which is indicate position of address
S " •' It means that each parameters are available to be set
[xx] " : It means address
00000 " : It means value of each address
No : " : This is area of inputting address
DATA : " : This is area of inputting value
2) Monitoring parameter mode
> M [00] : 00000
M[01]
: 00000
M [02] : 00000
No :
DATA :
> " : Cursor which is indicate position of address
M " : It means that each parameters are available to be monitored
[xx] " : It means address
00000 " : It means actual value of each address
No : " : This is area of inputting address
DATA : " : It is not available in this mode
KTE CO., LTD.
KTE
USER'S MANUAL OF
Thruster Control System ( KT - TCS )
REV
PAGE : 33 OF 43
DOCU. NO :
7.2 Explanations for each key
Information
Name
Numeric "O"
Numeric T
Numeric "2"
Numeric "3"
Numeric "4"
Numeric "5"
Numeric "6"
Numeric "7"
8
Numeric "8"
Numeric "9"
It is used for setting data
ENT
It is used for entering data or address
It is used for moving cursor to increase address
It is used for moving cursor to decrease address
It is used for changing over to parameter setting mode
It is used for changing over to parameter monitoring mode
KTE CO., LTD.
KTE
USER'S MANUAL OF
Thruster Control System ( KT - TCS )
7.3 Changing over to another address
1) Method by using "up/down" arrow key
- Press "up arrow" key to increase address
- Press "down arrow" key to decrease address
2) Method by numeric key
- Press address number that you want to move
- That number is displayed at "No" area
- Press "ENT" key to change over
7.4 Changing value of each parameters
-
It is available in "setting parameter" mode
Press address number that you want to change
That number is displayed at "No" area
Press "ENT" key to change over
Press "SET" key
Press available value for each parameter
Press "ENT" key to change value
If value is not useful, parameter will not changed
KTE CO., LTD.
REV
PAGE : 34 OF 43
DOCU. NO :
KTE
USER'S MANUAL OF
Thruster Control System ( KT - TCS )
REV
PAGE : 35 OF 43
DOCU. NO :
# Appendix, system parameters
1) Setting parameter & value
Address
S [00]
Function
W/H command full scale
S [01] W/H command port 10
S [02] Not used
S [03] W/H command zero
Range
Unit
0-300
Degree x 10
0-20
A/D
-
-
2038 - 2058
A/D
-
-
4075 ~ 4095
A/D
S [04]
Not used
S [05]
W/H command st'bd 10
S [06]
Port wing command full scale
0-300
Degree x 10
S [07]
Port wing command port 10
0-20
A/D
S [08]
Not used
-
-
S [09]
Port wing command zero
2038 ~ 2058
A/D
S [10]
Not used
-
-
S [11]
Port wing command st'bd 10
4075 ~ 4095
A/D
S [12]
STBD wing command full scale
0-300
Degree x 10
S [13]
STBD wing command port 10
0-20
A/D
S [14]
Not used
-
-
S [15]
St'bd wing command zero
2038 - 2058
A/D
S [16]
Not used
-
-
S [17]
St'bd wing command st'bd 10
4075 - 4095
A/D
Remark
0> Remark
Have no any effect if a data was set or indicator on the above " %. " address
KTE CO., LTD.
æ
^
«
8
æ
æ
KTE
USER'S MANUAL OF
Thruster Control System ( KT - TCS )
Addres
Function
s
S [18]
Feedback full scale
S [19] Feedback port 25
REV
PAGE : 36 OF 43
DOCU. NO :
Range
Unit
0 ~ 300
Degree x 10
0-20
A/D
S [20]
Feedback port 20
309 - 4 1 9
A/D
S [21]
Feedback port 15
809 - 829
A/D
S [22]
Feedback port 10
1218 ~ 1238
A/D
S [23]
Feedback port 5
1628 ~ 1648
A/D
S [24] Feedback zero
2038 ~ 2058
A/D
S [25] Feedback st'bd 5
2447 ~ 2467
A/D
S [26] Feedback st'bd 10
2857 ~ 2877
A/D
S [27] Feedback st'bd 15
3266 ~ 3286
A/D
S [28] Feedback st'bd 20
3676 - 3696
A/D
S [29] Feedback st'bd 25
4075 ~ 4095
A/D
S [30] Neutral zone
0 ~ 300
Degree x 10
S [31]
0 ~ 300
Degree x 10
0 or 1
0 : On
1 : Off
S [33] Change over Interlock zone
0 ~ 300
Degree x 10
S [34]
0 ~ 300
Degree x 10
S [35] St'bd max. limit
0 ~ 300
Degree x 10
S [36]
Follow up start gab
0 ~ 300
Degree x 10
S [37]
Follow up S/V on time
1 ~ 2500
SEC x 10
S [38]
Follow up S/V off time
1 ~ 2500
SEC x 10
Dead band zone
S [32] Change over Interlock On/Off
Port max. limit
KTE CO., LTD.
Remark
KTE
USER'S MANUAL OF
Thruster Control System ( KT - TCS )
Address
Function
REV
PAGE : 37 OF 43
DOCU. NO :
Range
Unit
S [39]
Auto load control limit
0 ~ 2000
A
S [40]
Auto load control proportional gain
0 ~ 300
Degree x 10
S [41]
Auto load control integral gain
1 ~ 2500
SEC x 10
S [42]
Load value full
0 ~ 2000
A
S [43]
Maximum dimmer value
0 ~ 255
D/A
S [44]
Minimum dimmer value
0 ~ 255
D/A
S [45]
Dimmer sensitivity value
0-10
0 : Fast
1 : Slow
S [46]
Fan & hyd. pump off delay time
0-50
SEC
S [47]
Zero pitch function On/Off
0 or 1
S [48]
Portable function On/Off
0 or 1
S [49]
W/H pitch Indicator offset
0 ~ 1024
D/A
S [50]
W/H pitch indicator gain
0 ~ 1024
D/A
S [51]
W/H ampere indicator offset
0 ~ 1024
D/A
S [52]
W/H ampere indicator gain
0 ~ 1024
D/A
S [53]
Wing pitch indicator offset
0 ~ 1024
D/A
S [54]
Wing pitch indicator gain
0 ~ 1024
D/A
S [55]
Wing ampere indicator offset
0 ~ 1024
D/A
S [56]
Wing ampere indicator gain
0 ~ 1024
D/A
S [57]
Command output offset for VDR
0 ~ 1024
D/A
S [58]
Command output gain for VDR
0 ~ 1024
D/A
S [59]
Feedback output offset for VDR
0 - 1024
D/A
S [60]
Feedback output gain for VDR
0 ~ 1024
D/A
KTE CO., LTD.
0 : Off
1 : On
0 : Off
1 : On
Remark
KTE
USER'S MANUAL OF
Thruster Control System ( KT - TCS )
REV
PAGE : 38 OF 43
DOCU. NO :
2) Monitoring parameter & value
Addres
Range
Unit
M [00] W/H command A/D value
0 ~ 4095
A/D
M [01] W/H command degree
0 ~ 300
Degree x 10
M [02] port command A/D value
0 ~ 4095
A/D
M [03] port command degree
0 ~ 300
Degree x 10
M [04] St'bd command A/D Value
0 ~ 4095
A/D
M [05] St'bd command degree
0 ~ 300
Degree x 10
M [06] Feed back A/D Value
0 ~ 4095
A/D
M [07] Feed back degree
0 ~ 300
Degree x 10
M [08] Over load value
0 ~ 2000
Ampere
2048 ~ 4095
A/D
M [10] Non-follow port max. limit
0 ~ 100
V x 10
minus voltage
M [11] Non-fo!!ow st'bd max. limit
0 - 100
V x 10
plus voltage
s
Function
M [09] Over load A/D value
KTE CO., LTD.
Remark
KTE
USER'S MANUAL OF
Thruster Control System ( KT - TCS )
3) W/H Control panel Internal arrangement
KTE CO., LTD.
REV
PAGE : 39 OF 43
DOCU. NO :
USER'S MANUAL OF
Thruster Control System ( KT - TCS )
KTE
REV
PAGE : 40 OF 43
DOCU. NO :
4) Method of changing a data by keyboard
1. Procedure of keyboard operation
Push
F1
Select an equivalent parameter
Change to setting mode
Push
Push
or
by cursor (
>=>
Input new data
Finish of adjustment
Change to monitoring mode
2. Appearance of keyboard
—t
B
Monitoring mode
> M[00]
M[01]
M[02]
NO :
>M[00] : 00000
M[01] : 00000
M[02] : 00000
NO :
DATA :
: 0000
: 0000
: 0000
DATA :
I Push ' F1 "
•i
J
S[37] : 0000
S[38] : 0000
>S[39] : 0000
NO : DATA :0129
| Push "Enf
V-
N
^ 1
2
3
4
5
6
7
8
9
Set
0
Ent
> S [00] : 0000
S [01] : 0000
S [02] : 0000
NO :_ DATA :
S[37] : 0000
S[38] : 0000
>S[39] : 0129
NO :_ DATA :
| Push " F2 '
Push "J." or'f
Monitoring mode
S[37]
S[38]
>S[39]
NO :_
[T
F2
V
Setting mode
*
: 0000
: 0000
: 0000
DATA :
Push " Set
)
_^
S[37]
S[38]
>S[39]
NO :
: 0000
: 0000
: 0000
DATA :_
| Push " new dato *J
KTE CO., LTD.
>M[00]
M [01]
M [02]
NO :
: 0000
: 0000
: 0000
DATA :
KTE
USER'S MANUAL OF
Thruster Control System ( KT - TCS )
REV
PAGE : 41 OF 43
DOCU. NO :
5) Trouble shooting
Trouble
A. AC source fail.
B. DC source fail.
C. W/H dial is not
effective
D. Port wing dial
is not effective
E. St'bd wing dial
is not effective
Check point
Place
Check AC source input
Terminal
board A
U, V
Check DC source input
Measure voltage of
potentiometer in W/H dial.
(Port 10 : -10 VDC
St'bd 10 : + 10 VDC)
Measure voltage of
potentiometer in port wing
dial.
(Port 10 : -10 VDC
St'bd 10 : + 10 VDC)
Measure voltage of
potentiometer in st'bd
wing dial.
(Port 10 : -10 VDC
St'bd 10 : + 10 VDC)
Measure voltage of
potentiometer in feedback
F. Feedback is not
box.
effective
(Port 10 : -10 VDC
St'bd 10 : + 10 VDC)
G. Change over is
not available
Check that control dial
position agrees with the
actual blade angle. (In the
case there is an interlock
for the agreement)
Terminal
board A
P, N
Result
0 VAC
220 VAC
0 VDC
Cause/Remedy
Check wire for source
Consult with maker
Check wire for source
24 VDC
Consult with maker
Analog
board
GND, TP1
Abnormal
Check potentiometer and
cable connection
Analog
board
GND, TP3
Abnormal
Analog
board
GND, TP2
Abnormal
Analog
board
GND, TP4
Para.
M [01]
M [03]
M [05]
M [07]
KTE CO., LTD.
Normal
Normal
Normal
Abnormal
Consult with maker
Check potentiometer and
cable connection
Consult with maker
Check potentiometer and
cable connection
Consult with maker
Check potentiometer and
cable connection
(feedback box)
Normal
Consult with maker
Agree
Consult with maker
Disagree
Check interlock
KTE
USER'S MANUAL OF
Thruster Control System ( KT - TCS )
Trouble
H. Follow up
control is not
available.
Check Point (CP)
Place
1. When port button is
pressed, measure contact of
relay for port solenoid
TB2
1. Non-follow up
control is not
available.
2. When st'bd button is
PAGE : 42 OF 43
DOCU. NO :
Cause / Remedy
Close
Consult with maker
Open
Check wiring between TB2
BSP.BSC and solenoid valve
Close
Consult with maker
Open
Check wiring between TB2
BSS.BSC and solenoid valve
Available
Consult with maker
TB2
BSS.BSC
TB2
BSP.BSC
Is follow up control
available?
TB2
BSS.BSC
1) Connect an am-meter
between TB4 18A.18B
with thruster stopped, and
J. ALC does not
function.
Result
BSP.BSC
during non-follow up control
pressed, measure contact of
relay for st'bd solenoid
during non-follow up control
REV
then check that the current
value is the same as
the design value after
starting thruster.
(Before removing the
am-meter, stop thruster)
TB3
BA1,
Not
available
Check 'H' of list
Same as
designed
value.
Consult with maker
There is a
difference.
Check CT.
BA2
0 A.
Check wiring between TB3
BA1 ,BA2 and CT for
looseness.
Check CT.
K. W/H dimmer
is not
available.
Para.
Available
Is setting date of parameter
M [43]
right ?
M [44]
Not
M [45]
available
KTE CO., LTD.
Consult with maker
Adjust parameter
KTE
USER'S MANUAL OF
Thruster Control System ( KT - TCS )
REV
PAGE : 43 OF 43
DOCU. NO :
6) Analog board comp.
TP1
a
WGAIN
< CONTROL DIAL SETTING >
TP1.GDN : Measurement of setting value(-10V~+10V)
at W/H
SettingtZERO.WGAIN : Setting(-10V~+10V)
of control dial
at W/H
TP3
D
PZERO
PGAIN
TP2.GDN : Measurement of setting value(-10V~+10V)
at P/W
PZERO.PGAIN : Settinq(-10V~+10V) of control dial
at P/W
TP2
D
SZERO
SGAIN
TP3.GDN : Measurement of setting value(-10V~+10V)
at S/W
SZERO.SGAIN : Setting(-10V~+10V) of control dial
at S/W
TP4
VR4VR5
TP4.GDN : Measurement of setting value(-10V~+10V)
at feedback box
VR4.VR5 : Setting(-10V~+10V) of potentiometer
at feedback box
< STBD AND PORT MAXIMUM UMT SETTING(NON-FOLLW) >
VR1
VR2
VR1 : Setting of port maximum limt value(0~100%)
at non— follow
VR2 : Setting of starboard maximum limt value(0~100%)
at non-follow
< AMPERE METER SETTING >
VR8
^"
Maker Charge
GND
n
* NOTE : The 0V should be set in advance by mens of
measuring SIG terminal and GND terminal of
potentiometer(W/H. P/W. S/W. F/B)
KTE CO., LTD.
DAEWOO SHIPBUILDING &
MARINE ENGINEERING CO., LTD.
MESSRS :
HNo. 4437/4438/4441
BOW & STERN THRUSTER REMOTE CONTROL SYSTEM
DRAWING No.
DATE
210x297(mm)
APPROVED
KTM-0037
JULY
1.
2004
FILE NAME:
D4437
CHECKED BY
KTECo.,Ltd.
CHECKED BY
1487-1, SongJcong-Dong, OangMO-Ou,
Busan 618-Z70, Koraa
T«l i +82-51-285-0255 Fax:+82-51-285-O25O
DESIGNED BY
S. H. OH (9L&3.)
DD-25
PLAN HISTORY
REV.
A
DATE
D E S C R I T I O N
2004. 07. 01
SUBMITTED TO SHIPYARD & CLASS
2004. 12. 15
REVISED BY SHIPYARD
COMMENTS
SHEET No.
CONFIRMED BY
2,3,4,5,6,7,8,13,14.15,16
17,18,19,20,21,22,23,26
#£&
^
(
«>-
4>
HISTORY
BOW & STERN THRUSTER REMOTE CONTROL SYSTEM
INSTRUCTION MANUAL
- Micro Computer Type 1. Outline of system
This system is so designed that bow thruster (Controllable Pitch Propeller type)
is controlled by means of follow-up control by the maneuvering dial which is
located on W/H control panel and the both wing control panels.
2. Electric source
AC 220V 60Hz 01
DC 24V battery power supply (for back up alarm system)
3. Constitution of the control system
1) Wheel house control panel :
2 ( Bow, Stern )
( with power supply )
2) Both wing control panel :
2 ( Bow & Stern )
3) Terminal board :
2 sets ( Bow, Stern )
4) Follow up transmitter :
2 ( Bow, Stern )
4. General description of the system
1) Change-over control position
Change-over can be carried out within matching zone between the existing
position and the position to be changed by pushing change-over switch on W/H
control panel and both wing control box. the switch lamp will be flickering
with alarm sounding when the position was out of range.
2) Pitch control
When operating the maneuvering dial, the difference of position between the
potentiometer incorporated in the maneuvering dial and that attached to
feedback box transmitter results.
The voltage resulted from the difference of position is amplified and excites
the solenoid valve in the hydraulic unit.
Therefore, the blade of CPP begins shifting in the direction ordered by the
maneuvering dial.
At the same time, the potentiometer connected to the blade by means of link and
chain begins turning too and when its position corresponds to the position of
potentiometer in the maneuvering dial, the voltage will be appeared and the
solenoid valves is energized.
Thus the blade of CPP follows up the pitch ordered by the maneuvering dial.
- 1-
3) ALC (Automatic Load Control)
When the main motor load signal exceeds the predetermined value which is set
by ALC setting dial, the pitch will be automatically reduced, with a consequent
reduction in load ALC setting level. The ALC lamp will be lit up at that time.
Therefore, if the main motor load lightens, the pitch will be automatically
increased to the value commanded by the maneuvering dial.
This function will be canceled by the switch rON/OFFj which was attached an
control panel.
4) Ten-Key board
This system is composed of micro computer type. So, it is possible to adjust
necessary limits and functions by Ten-Key Board.
Please refer to detailed methods for adjustment that were prepared on remote control
system instruction manual.
5. Specification of W/H controller
1) General
(1) Power supply : DC 24V, AC 220V 60Hz 10
(2) Power consumption (Current) : 3.0A/24V
(3) Main CPU : 8 Bits micro-processor
2) Control power switch
AC 220V, DC24V
r
ON-OFFj
switch
3) Blade angle control dial under FOLLOW control mode
Control dial position is shown as a scale notch rPort 10-5-0-5-10 STBDj .
The scale of control dial is illuminated by LED equipped inside the control
panel.
4) Blade angle control push button under NON-FOLLOW control mode
These two push buttons rPORTj / rSTBDj are only possible under NON-FOLLOW mode.
A button was operated by push, relevant solenoid valve will be energized.
The blade angle could be changed because this mode is not computer control.
5) Blade angle indicator
Actual blade angle is indicated by a LED lamp.
Port side : Red STBD side : Green
6) Main motor ampere meter
Main motor ampere is indicated by four digit number.
During press the push button of meter side, blade angle indicated
(00.0 : three figures ) .
* Please supply AC 0-1A signal from starter panel "CT".
7) Thruster operation switches : rSTOP, FAN RUN. PUMP RUN, THRUSTER RUNj
The thruster will be stopped when the rSTOPj switch was pushed and then
FAN/PUMP will be stopped after 2 sees with stop order by STOP button.
8) Control station
The control position will be changed when the rW/Hj push button was pushed
under wing control station. The lamp will be steady condition with completion
of change-over. If a control dial were not matched, the lamp will be flickered.
The control change-over is impossible at that time.
- 2-
9) Zero pitch mode switch
Equipped in W/H control unit.
When this button is pushed, all control unit is turned off and a blade pitch is kept in
zero position automatically.
In this mode, only rHYD.PUMP RUNj . rBLADE NEUTRALj , rPORT/STBDj lamps
are activated.
If press r ZERO PITCH ON/OFF j push button, come out in this mode.
10) Dimmer switch
The LED lamp will be adjusted by r Up(T)/Down(|)j push button switch.
11) Control mode (FOLLOW/NON-FOLLOW)
The control mode will be changed by pushing FOLLOW/NON-FOLLOW.
The control is possible by rNON-FOLLOWj when the micro computer (CPU) was
out of order.
12) Lamp / buzzer test push button
All lamp light up and buzzer sounds when pressing rLAMP BUZZER TESTj push button.
13) Buzzer stop push button
Used to stop alarm buzzer and alarm lamp.
14) Flicker stop push button
Used to stop flickering lamp.
15) Alarm buzzer
Equipped inside of control panel.
16) Emergency stop push button
This push button is independent of micro computer and locking type with
crossbar. The contact signal will be opened when it was pushed.
17) Indication lamp
© Max. number of general indication lamps : 25 pcs
© Max. number of alarm lamps (spare 4 pcs ): 12 pcs
Alarm mode is according to KTMS. This alarm circuit is independent
of control circuit (micro computer CPU abnormal).
6. Specification of wing controller
1) Blade angle control dial
Control dial position is shown as a scale notch ""Port 10-5-0-5-10 STBDj .
The scale of control dial is illuminated by LED equipped inside the control
panel.
2) Blade angle indicator ( analog apperance )
Actual blade angle is indicated by an analog meter.
And 10 nofch indicate the rated maximum blade angle position.
© Indi.scale : 10-5-0-5-10
© Port side : Red
© STBD side : Green
3) Main motor ampere meter (analog apperance)
Main motor ampere is indicated by an analog meter.
* Please supply AC 0-1A signal from starter panel "CT".
- 3-
4) Control station
The control position will be changed when the
r
CHANGE-OVERj push button
on the each wing controller was pushed under relevant control station.
The lamp will be steady condition with completion of change-over. If a control
dial were not matched, the lamp will be flickered. The control change-over
is impossible at that time.
5) Dimmer switch
The LED lamp will be adjusted by dimmer push button.
6) Thruster run lamp
This lamp will be indicated during main motor run.
7) Alarm lamp
Two alarms were prepared as rTHRUSTER ABNORMALj / rM.MOTOR OVERLOADj
8) Lamp / buzzer test push button
All lamp light up and buzzer sounds when depress
r
LAMP BUZZER TESTj push button.
9) Buzzer stop push button
Used to stop alarm buzzer and alarm lamp.
10) Emergency stop push button
This push button is independent of micro computer and locking type with
crossbar. The contact signal will be opened when it was pushed.
7. Signals for VDR interface
- Analog Output : 4 Channel
1) Bow thruster pitch command signal (±10VDC)
(-10VDC -» PORT 25 DEG, +10VDC -> STBD 25 DEG.)
2) Bow thruster pitch feedback signal (+10VDC)
(-10VDC -» PORT 25 DEG, +10VDC -» STBD 25 DEG.)
3) Bow thruster status signal (ON/OFF)
(Thruster running signal -» Close : RUN, Open : STOP)
8. Pitch to zero system
During voyage of the vessel, sometimes the propeller is rotated by the tide
( the seawater coming into the thruster tunnel ) and the pitch is moved out of the
zero position. In this situation, the hydraulic pump automatically will be started and
the pitch is kept in zero. When blade angle returns to zero position, hydraulic pump
and solenoid valve will be stopped after preset time.
This mode is operated independently from normal mode by pushing of this mode
select button on W/H control panel.
Other unrelated lamps except followings shall not be caused under zero pitch mode.
1) Ind.lamp of zero pitch mode
2) Ind.lamp of blade neutral
3) Ind.lamp of hyd. pump run
4) Ind.lamp of acting solenoid valve
5) Alarm lamps
- 4-
1) Zero Pitch Mode Blockdiagram
(1) Changeover to Zero pitch mode
Start
Normal control mode
Push ZERO PITCH
ON/OFF button
Changeover interlock
1) Blade angle is to be neutral position
( BLADE NEUTRAL lamp : ON )
2) Hyd. pump is stopped condition
( HYD.PUMP RUN lamp : OFF )
Satisfied
changeover
interlock
Not possible change to
Zero pitch mode
Change to Zero pitch
mode
*Not indicated ZERO PITCH
ON/OFF lamp
Indicate ZERO PITCH
ON/OFF lamp
- 5-
(2) Operation on Zero pitch mode
I
Zero pitch mode
lamp ON
Hyd. pump motor
starting
Zero pitch mode
Keep
S/V ON
Blade angle move
to Zero position
Blade angle
Zero ?
* To be surely pushed ZERO PITCH ON/OFF button again
for returning of normal mode
- 6-
REMOTE CONTROL
OWNER
A.P. Moller
MESSRS
DAEWOO SHIPBUILDING &
MARINE ENGINEERING CO., LTD.
POWER SOURCE
AC 220V ,
PAINT COLOR
4437/4438/4441
HNO.
10 60 Hz,
KT-TCS-C (W/H)
(INNER : MAKER'S KT-TCS-C (WING)
STANDARD) TERMINAL BOARD A,B
FEEDBACK BOX
r| Aqq
DNV
U_AU
AMBIENT TEM 3
DC 24V
45'C
MUNSELL N3.0 SEMI-POLISHED
2SETS/SHIP
MUNSELL N3.0 SEMI-POLISHED
2SETS/SHIP
MUNSELL N3.0 SEMI-POLISHED
2SETS/SHIP
7.5 BG 7/2
2SETS/SHIP
LETTER OF NAME PLATE
ENGLISH
MATERIAL OF NAME PL ATE
PHENOLIC
DRAWING & DOCUMENT
ENGLISH
EARTHING
WITH
SIGNAL LAMP
^ 1 2W
FUSE
(CELLO-LITE)
OVERLOAD
PROTECTOR
MOLDED CASE
CIRCUIT
BREAKER
CAPACITY
COLOR OF
CABLE CAP
U
n
W
V
\A
Vi
ED
MITE
e
t LUE
r\
W
INTERNAL
WIRING
D
DED
P
R
W
N
BR LUE
MAIN CIRCUIT
: 660V SCP 2.0SQ
CONT CIRCUIT
: 660V SCP 1.25SQ OR 0.75SQ
CABLE LEAD-IN
REMARKS
HNO.
4437/4438/4441
ORDER NO.
KTM-04022/023/024
MACH NO.
W/H CONT. : A01 03-04 / A01 19-04 / A01 35-04
WING CONT. : A0104~5-04 / A0120~1-04 / A0136~7-04
FEEDBACK BOX : A01 03-01 -04 / A01 19-01 -04 / A01 35-01-04
DF?AW No.
TITLE
R
GENERAL SPECIFICATION
KTM 0037 01 0
~
V
"KTE
K No.
£*37G1
SHEET
No.
1
No.
NAME
SPECIFICATION
TYPE
REMARK
QT'Y
MAKER
1
CONTROL POWER
SWITCH
C60N, 6N
2
W/H THRUSTER
CONTROLLER
KT-TCS-C
2
KTE
3
WING THRUSTER
CONTROLLER
KT-TCS-C
2
KTE
4
TERMINAL
BOARD
A ,B
4
KTE
5
POWER SUPPLY
2
LAMBDA
6
CONTROL LEVER /j\
6
ELESA
WITH LOCK
6
EAO
PROTECTIVE
COVER
6
EAO
6
EAO
2P,
AC220V/DC24V
151W
EWS1 50-24
704-062.2
7
4
6A
1o1b
MERLIN GERIN
EM'CY STOP P/B
704-925.0
8
SIGNAL LAMP
700-00.2
9
ANALOG METER FOR
MAIN MOTOR
TME-60C
4
TSURVGA
10
ANALOG METER FOR
PITCH INDICATOR
TME-80B
4
TSURVGA
11
FOLLOW UP
TRANSMITTER
TCT-220/200
2
KTE
24V, 1.2W
12
13
14
15
16
17
18
A
R
E
2004.12.15
TITLE
DRAW No.
PARTS LIST
KTM -0037-02-1
IfVE
DISK No
SHEET
•*iE
D4437P1
No.
-
2
(-V
7\
m
CO
IE
Cd -,,
O ?
<^4
O O
31
3
•D>
"D ^0
-<
3
2
m
c
—i
OJ
-vi
l
o
OJ
o
o
s:
i
m
5s- 0
i
o n
g Q
o m
-n
5 -u
^*
=
70
o
i
^
< m
CO
m 3D
mi
m
B
-c
l±£|
HT
?§
F2
F1
BAB2
BAB1
BAB2
BAB1
^
SH2
SH1
BE6
BMC
J5L_
.. HT
HR
p TH1
L TH2
F
TPYC-6
AC 440V.60Hz.30
POWER SOURCE
^
I FAN RUN SIG.
.READY TO START
OVERLOAD
M/M WINDING
TEMP. HIGH
^. EM'CY STOP
M/M STARTER ABN.
M/M START FAIL.
M/M
POWER AVAILABLE
READY TO START
THRUSTER RUN
M/MOTOR AMP.
AC 0~1A
-°_»'
L
M/MOTOR EM'CY STOP .
_ THRUSTER
START/STOP
F
.BLADE ANGLE NEUTRAL
-Oj_tt-l
C12
C11
E5
E4
E3
E2
E1
BNR2
BNR1
m
p
b
H
W
—l
m
$
E2
E1
BEB
BE7
BE5
BE3
BEC
BM6
BM5
BM3
BMC
BME3
BME2
BP3
\i
\
t
j)(C
)
f
118
10B
10A
9B
9A
BB
BA
7B
7A
6B
BNR2
•+J
6A
4A
3B
3A
--V
-
i
In
1
^
NJ
T>1>
11B
1
J
10A
i
L
98
9A
BB
BA
7B
7A
108
iL
L
—
—
-
68
6A
-
58
-
5A
4A
38
3A
2B
-
-
iA
-
-
2A
1B
1A
n ^i r
1å:
' —JU r
J U—
L
5
C/)
X
1
"S
IO
LO
\
'^
A
--
-.-:
f—
L
CD
2B
-
r-
-
*>
S
In
1
Kj
§[>
»
i
1
2A
1
9A
BB
8A
7B
7A
6B
6A
58
5A
4A
3B
3A
2B
2A
. ^ 9B
-
-i
1
1
1A
1B
r
10A
J
—-y r
L 108
1
-
BNR1
BP2
n
i.
~| N
J U- ---)
1
1B
1A
10B
5B
BP1
-o
,
--V
0
0
>
X)
r1/
-7
•^
33
5A
BN2
BN1
BP6
BP5
BP4
BP3
BP2
10A
BP1
j
9B
BE7
BEB
9A
BE6
-1
8A
6B
>
G
BE5
2
-
7A
D
— — —
7B
-
-
—
-
BE4
6B
6A
5B
5A
BE3
O
CD
r~
>
S
\'
-
BE2
BEI
BEC
BM5
jn
A
f-
-l
3B
BM2
-
3A
BM1
4A
2B
BMC
m
2A
BA2
BM3
10
-i
CO
l>
s
^1
18
ijl
Js
1°L
\
1A
5
ro
0
§
/
(\
BA1
'-O
BN2_
BN1
BPO
M/S CONTROL
(ON AT M/S) i—^Q
L_o_0O— BNO
_ EM'CY STOP
ABNORMAL
ALARM
ABNORMAL
ALARM
SPACE HEATER
HYD.PUMP RUN
( DRY CONTACT ;
^ HYD. PUMP MOTOR
' START/STOP
SOURCE
HEATER
SOURCE
READY
TO START
„ HYD. PUMP MOTOR
START/STOP
BP5
DDC
BP4
BE6
FAN MOTOR O/L
BE2
BE1
BE4
L/L
HYD.PUMP O/L
HEAD. TANK
LOW P.
BME4
BEC
HYD. P/P
BME3
BM2
HYD. PUMP RUN
BME1
BME2
BM1
BMC
BNO
AC220V 60Hz 01(3A) MPYC-2
CONTROL POWER SUPPLY
FAN MOTOR RUN
SPACE HEATER
SOURCE
BK1
LOW LEVEL
1
(ALARM OPEN) Lr-»- BK2
THERMOSTAT
HYD. PUMP
BB
LOW PRESS
l
1
iL_n(ALARM OPEN)
BH
BFE
BF4
BF3
BF2
BF1
DC24V (3A) MPYC-2
BATTERY POWER SUPPLY
S3
-i |
5
5
°i
GO
2
-•
CD
æ
T)
r~
O
O
O
q
co
m
o z:
CO -,
£ CO
Oj 7s
o o
m
l
o
o
GJ
\l
l
o
-pl
CO
m
m
g s:
> o
Z
o
i
'
O ^3
c
70
m
< m ;u
-c
p TH1
L TH2
SH
SB
SFE
SF4
SF3
O/L
F
LO_Q
uz
C4
C3
C2
C1
IL
E4
SE7
M/M WINDING
HIGH. TEMP
E3
SE6
M/M STARTER A9N.
EM'CY STOP
SE5
M/M START FAIL.
SE3
SEC
SM6
POWER AVAILABLE
SM3
SMC
SA2
SA1
(fÖ)(öj)
o
7A
11B
108
10A
9B
9A
1
l
J
y
(/)
A
--V
L
—
Ol
jjjF»
i
NJ
k
1
V
i
L
P
i
1
i
L
1^— -l JrrL
3
I,^J
—p
o
~\
ÄJ
J U—
*.*
\
(O
?
i
Z
F^
™
cn
N)
i
yO
i1
'
V—
SME3
-
-
-
-
-
6B
6A
58
5A
4A
-
3A
3B
-
2A
2B
—
-i
l
l
1B
1A
10B
10A
9B
J
S
-l
\ l'
-l
8B
r—
1\
-
8A
d
l
n f
r^
-]
i.N •' 1 —ju rL
J U--
78
9A
7A
11B
108
10A
98
9A
38
8A
7B
7A
6B
6A
58
5A
4A
3B
3A
2B
2A
18
1A
118
108
10A
98
9A
8B
8A
7B
7A
6B
-1
5A
5B
6A
,
-
4A
38
3A
2B
-
y.
B
.
/,
--V
18
2A
-
"-
\f
-
-
U
6B
-
-
-
W
1
to
3
£>
s
-
r— l
6A
5B
5A
4A
38
•sj
ni
3A
8A
CD
D
o
>
\
y (L
f s,--•NiJ^
00 t
>
i~ ,
<I
a
2B
Å
2A
-
1B
3B
-,
1A
SME2
mD.puup
K3 MOTORINDI.
m
70
—i
.!,
SP3
SM5
M /M OVERLOAD
1
.1YD.PUUP
MOTOR
START/STOP
P/8
o
>
æ
o
£
Jr
X
V
§ Q l!]
/
-
C12
C11
C5
C4
C3
C2
SN2
SN1
SP6
SP5
SP4
SP3
SP2
SP1
SE7
SE6
SE5
SE4
SE3
SE2
m
•< 3
7B
SP2
SP1
SNR2
SNR1
SN2
SN1
SNO
SPO
C11
READY TO START
THRUSTER RUN
C1
m
b
b
SNR2
E3
SEC
SNR1
SEI
SM6_
SM3
SP5
SM5
SM2
SP4
SP6
SMC
CONTROL POWER SUPPLY
AC220V 60Hz 01 (3A) MPYC-2
SE4
SE2
SE1
SEC
SM2
SMC
STOP/
\ C12
EM'CY STOP
M/MOTOR AMP.
AC 0~1A
M/MOTOR
. THRUSTER
"•START/STOP
„ READY TO START
så
SH
°_?- C5
U
l
F
BLADE ANGLE NEUTRAL
M/S CONTROL
(ON AT M/S)
CEM'CY
ABNORMAL
ALARM
HYD.PUMP RUN
( WITH VOLT )
^ HYD. PUMP MOTOR
^TART/STOP
SPACE HEATER
HYD.PUMP RUN _ l
( DRY CONTACT ) L-O-O-
HYD. PUMP MOTOR
START/STOP
TPYC-8
E/MOTOR
SOURCE AC 440V,60Hz,30
POWER SOURCE
HEATER
SOURCE
READY
TO START
. HYD. PUMP MOTOR
START/STOP
HYD.PUMP
L/L
LOW P.
HEAD. TANK
HYD. P/P
HYD. PUMP RUN
SPACE HEATER
SOURCE
TH2
TH1
SK2
SK1
SK1
LOW LEVEL
l
(ALARM OPEN) L-r-»- SK2
THERMOSTAT
SAB1 |-|ABNORMAL,
J ALARM
SAB2
SAB2
SAB1
To
SH2
SH1
HT
HS
HR
HYD. PUMP
LOW PRESS
(ALARM
l
SF1
SF2
DC24V (3A)MPYC-2
BATTERY POWER SUPPLY
i
l
1
l
—3
^
t
1
CD
~]
ED
1°
2
„
1
l
'
i
-n l
f—
Il
o
O
i
o1
r~
l
m
r~
o
o
O
PORT WING CONTROL PANEL
COMMAND
SIGNAL
FEEDBACK
SIGNAL
THRUSTER COMMAND
RUNN'G SIG. SIGNAL
V
V
FEEDBACK
SIGNAL
ST'BD WING CONTROL PANEL
THRUSTER
RUNN'G SIG.
V
*/+10VDC -»ST'BD 25DEG.
I-10VDC — PORT 25DEG.
FROM W/H
CONTROL PANEL
( SHEET 3 )
W/H INDI. LAMP
W/H ALARM LAMP
CONTACT OUTPUT
TO W/H CONTROL PANEL
( SHEET 3 )
ON AT
LOCAL
C/T
200/1A
J
HYD. PUMP
STARTER
M/MOTOR
STARTER
l
.^
l
M/MOTOR
STARTER
M/MOTOR
STARTER
DRAW
TITLE
BOW THRUSTER REMOTE CONTROL SYSTEM
* SOLENOID VALVE
INRUSH CURRENT 0.8 A
HOLD CURRENT 0.23 A
WIRING DIAGRAM 2
No.
KTM-0037-05-1
DISK No.
D4437BC2
STBD WING CONTROL PANEL
PORT WING CONTROL PANEL
COMMAND FEEDBACK
SIGNAL
SIGNAL
THRUSTER COMMAND
RUNN'G SIG. SIGNAL
FEEDBACK
SIGNAL
T T T T T
y
Y
Y
V
v
TO A.M.S
TO ECR
CONSOLE
*|'+10VDC — STBD 25DE6.
V-10VDC — PORT 25DEG.
TERMINAL BOARD B
FROM W/H
CONTROL PANEL
( SHEET 4 )
TERMINAL BOARD A
W/H INDI. LAMP
W/H ALARM LAMP
n
TO W/H CONTROL PANEL
1+-Ö-.
J
•Lo
|
| PORT SOL.
o—i
[ ST*BD SOL.
C/T
i
l L.
HYD. PUMP STARTER
2500/1A
MAIN MOTOR STARTER
l
HYD. PUMP
STARTER
M/MOTOR
STARTER
HYD. PUMP
STARTER
M/MOTOR
STARTER
2004.12.15
* SOLENOID VALVE
INRUSH CURRENT 0.8 A
HOLD CURRENT 0.23 A
UIML
FOLLOW UP
TRANSMITTER
TITLE
STERN THRUSTER REMOTE CONTROL SYSTEM
WIRING DIAGRAM 2
KTE
DRAW No.
KTM-0037-06-1
DISK No.
D4437SC2
T
SHEET
POWER SUPPLY
(EWS150-24)
+S +V -V
-S ACG L
N
DC24V OUTPUT
AC220V INPUT
r
AEMSW
TB2B
-TB1D-
RELAY BOARD
TB1A
L
AC220V
INPUT
CN3 (64P)
Tzf
CN4 (50P)j
DC24V
INPUT
W/H CONTROL PANEL
CABLE & TERMINAL BOARD
13
m
>
CD
CONTROL
POWER
SWITCH
(AC220V)
Q.
m
"Z.
m
CONTROL
POWER
SWITCH
(DC24V)
O.
Z
TB3 (36P)
TB4 (36P)
TB5
(20P)
TERMINAL BOARD A
CONTROL VOLTAGE
AC220V 60Hz «11 POWER SUPPLY
TB6 (36P)|
TB7
(36P)
TERMINAL BOARD B
OF SOLENOID VALVE IS AC220V.
2004.12.15
TITLE
DRAW
No.
CONNECTION DIAGRAM OF
BATTERY DC24V POWER SUPPLY
SOLENOID
VALVE
BOW THRUSTER W/H
CONTROL PANEL
KTW-0037-07-1
POWER SUPPLY
(EWS150-24)
+S +V -V
-S ACG L
N
AC220V
DC24V OUTPUT
INPUT
~i
r
RELAY BOARD
AEMSW
TB2B
-TB1D-
TB1A
CN3 (64P)
CONTROL
CN6 (50P)
DC24V
INPUT
AC220V
INPUT
W/H
CN4 (50P)
PANEL
CABLE & TERMINAL
BOARD
EMSW
TB2A
CONTROL
POWER
SWITCH
(AC220V)
CONTROL
POWER
SWITCH
(DC24V)
PORT SOL
r^
STBD SOL
TB3 (36P)
TB4 (36P)
TB2
A A A
TERMINAL BOARD A
TERMINAL BOARD B
CONTROL VOLTAGE OF SOLENOID VALVE IS AC220V.
AC220V 60HZ 01 POWER SUPPLY
BATTERY DC24V POWER SUPPLY
2004.12.15
SOLENOID
VALVE
TITLE
CONNECTION DIAGRAM OF
STERN THRUSTER W/H CONTROL PANEL
KTE
DRAW No.
KTM-0037-08-1
DISK No.
D4437SC3
SHEET
CONTROL_P£WER SWITCH
C60, 6A
CONTROL_ POWER SWITCH
C60, 6A
CONTROL POWER
O i
o l
AC220V 60Hz 10,
700VA
CONTROL
POWER SUPPLY
R3
l Oi
k.. ,
'n'ON/
o
o
Oi
I
\- OFF
O'
'
NORMAL
CONTROLLER
(DISPLAY &.
W/H
CONTROL
PANEL
R4
|
MAIN CPU BOARD)
TB1D
-o o-
->SP2'
SOLENOID VALVE
(SHEET 4, TB2A)
DC24V , 100W
BATTERY
POWER SUPPLY
( TO SHEET 12)
l
I
[P.C.Bl
i
i
I
: TERMINAL BOARD A
I
CONTROL P.C.B
(RELAY BOARD)
I
TITLE
STERN THRUSTER REMOTE
CONTROL SYSTEM
DRAW No,
KTM-0037-10-0
DISK No.
D4437SC4
SHEET
10
RELAY
BOARD
z
o:
o:
o
o
ce
o
to
o
I
CJ
Q-
eto ^
Z)
o
LiJ
Q
<
_J
Q.
CC
H3
LÜ
to
æ
m z
'S
o:
O.
to
^
1
^ Q
LJ
2 o
Q.
0
r-! <u
6
. w
tn
to
TB4l
/
BP2:*S
•O BP1
R8
THRUSTER RUN
"
W/H CONTROL PANEL
'l
l'
L.±
\
[
~~l
THRUSTER STOP
1
R11
O
O
l
o '
R12
OI
oi
Ol
R12
oi
BP3
BP4
R12
R9
HYD. PUMP
l
RUN
BP5
T1
l
FROM
SHEET 9
BP2
'
O i
l
Ol
O
R11
HYD. PUMP STOP
(5sec DELAY)
BLADE ANGLE
NEUTRAL
T2
|R5 >5
i
oi
BP6
BN1
R6
BN2
RELAY
BOARD
TER
BO;
13
SET :
5sec
14
T2 ) SET :
6sec
14
BN2>
TITLE
BOW THRUSTER REMOTE
CONTROL SYSTEM
DRAW No.
KTM-0037-11-0
DISK No.
D4437BC5
SHEET
RELAY
BOARD
2
ct:
CL
£
o
o
to
00
2
a:
co
oo
i
o
o
O Q.
cc
£
to
D-
u
p S
m z
TB4l
SP2
O SP1
R8
THRUSTER RUN
W/H CONTROL PANEL
I
I
.
FROM
SHEET 10
n
hi
F
oi
i
l
THRUSTER STOP
R11
|R12
n l
|R12
o'
o
t
O
(
SP3
SP4
R12
öl
R9
HYD. PUMP
RUN
HYD. PUMP STOP
(5sec DELAY)
BLADE ANGLE
NEUTRAL
T2
R5
O SP2
R11
SP5
—A—
SP6
SN1
R6
SN2
R5
RELAY
BOARD
13
TER
BOA
13
SET :
6sec
SET :
5sec
14
14
SN2>
\
TITLE
STERN THRUSTER REMOTE
CONTROL SYSTEM
DRAW No.
KTM-0037-12-0
DISK No.
D4437SC5
SHEET
12
W/H CONSOLE
r
n
W/H CONTROL PANEL
EM'C Y STOP
DIGITAL AMMETER
TERMINAL BOARD A
|
^ EMSW
2 LU
3
LU
n
| cl Q| al al
Jatø[i[i|
TB3
L,
J
JERMjNAL BOARD_B_
TERMINAL BOARD B
TB6
TB7
i
"]r^™
C/T
200/1A
ANALOG AMMETER
L__
M/M
U
|^TNnR
11
TB7
(TERMINAL
BOARD B)
(TERMINAL
BOARD B)
I
I
PORT WING PANEL
Y
i
BTB2
i
U
l-
TT
'
'
|S
i
"
|
|
li
1 1
ANALOG AMMETER
_JL_.
STARTER PANEL
1
EM|CY STOP
1
EM'CY STOP
_J
ST'BD WING PANEL
PORT WING PANEL
A
2004.12.15
M/M
STARTER
ST'BD WING PANEL
TITLE
BOW THRUSTER CONNECTION DIAGRAM OF
AMPERE METER AND EM'CY STOP
DRAW No.
KTM-0037-13-1
DISK No.
D4437BC6
SHEET
13
W/H CONSOLE
_1
pW/H CONTROL PANEL
EM'CY STOP
DIGITAL AMMETER
TERMINAL BOARD A
n
clalal
TB3
l
L
JERMJNAL BOARD_B_
TERMINAL BOARD B
l
TB6
.— J
TB 6
TB7
TB7
(TERMINAL
BOARD B)
"ir
n
STB1
(TERMINAL
BOARD B)
U LJ
2 2
STB2
4h
200/1A
1
U
1 1
ANALOG AMMETER
L_
PORT WING PANEL
M/M
I'CY STOP |
ANALOG AMMETER
,_JL_.
STARTER PANEL
..J
ST'BD WING PANEL
1
|
l l
l
PORT WING PANEL
A
l
M/M
TT
.
STB2
sg
zd
o&
l
l
IS
|
|
EM'CY STOP
l L__,
STARTER
ST'BD WING PANEL
2004.12.15 TITLE
STERN THRUSTER CONNECTION DIAGRAM 01
AMPERE METER AND EM'CY STOP
DRAW No.
KTM-0037-14-1
DISK No.
D4437SC6
SHEET
14
322
4-06
302
O
r
•THRUSTER CONTROLLER -
i
n
_
i
t
PORT
10
5
O
3
ANALOG BOARD
STBO
IB
iliiiiiiiiiiiiiiTin^iiiiiiiiliiiuiiiiili
i
|
1
CM
cc s- rD
tu u- m
O
Q-
CPU BOARD
1
Z3 C/)
CO ^
uJ
^._x*
I/O BOARD
CN6
CN4
i
=,
PORT
STBO
J
A
l©
(—T81A—|
j— TB28 —| j
l Bvl 8U
|su,
SVI
1
TB 10
BPO SNOJ
B ' BN
pCMSW-,
ME1 UQ
92
3.2
280
70
MOTHER BOARD/
REAR VIEW
RELAY BOARD
NOTE
1. COLOR OF FRONT FILM & PANEL SURFACE: MUNSELL N3.0 SEMI-POLISHED
2. COLOR OF PANEL INSIDE : MUNSELL N3.0 SEMI-POLISHED
\
Q : INDICATOR LAMP
[] : PUSH BUTTON WITH LAMP
O
: PUSH LOCK WITH LAMP
2004.12.15
POWER
SUPPLY
R
E
V
TITLE
BOW THRUSTER
W/H CONTROL PANEL
KTÜ
DRAW No.
KTM-0037-15-1
DISK No.
D4437BD1
SHEET
15
322
4-06
302
O
r
-THRUSTER CONTROLLERWIN MOTOft
;SI BBBB Ila!
•/•l
WW
i!
( ;)
l
n
V—';
Cxj
D
UHA
PORT
5
ANALOG BOARD
UJ n LQ
i5 CL ,-
CPU BOARD
CL
CC
SUDE *NO£ KXCATO«
STBO
10
nrnmimmnrreaamTmTmnnmi
I/O
!!
^J
Q
o r> co
CO
^
Lu
;NC
BOARD
:N<
l
.10
PORT
L_
STBO
1 sv j sul
A
(— TB2B—, |
IsiM SVI
1 r04'-Jwn
TB10—
SPO SNO
SP SN
EM1 EU2J
o
92
3.2
j
280
70
MOTHER BOARD/
REAR VIEW
RELAY BOARD
NOTE
1. COLOR OF FRONT FILM & PANEL SURFACE: MUNSELL N3.0 SEMI-POLISHED
2. COLOR OF PANEL INSIDE : MUNSELL N3.0 SEMI-POLISHED
Q : INDICATOR LAMP
Q : PUSH BUTTON WITH LAMP
A : PUSH LOCK WITH LAMP
2004.12.15
POWER
SUPPLY
R
TITLE
DRAW No.
STERN THRUSTER
W/H
CONTROL PANEL
KTM-0037-16-1
E
V
KTE
DISK No.
D4437SD1
I
SHEET
16
4-06
302
302
J=
522^
4-M4
CO
l
co
CM
THRUSTER CONTROLLER
INDICATOR
MAIN MOTOR
EM'CY STOP
PO
SO
iCONT. STATION}
ALARM
WING
.
«c
DC
U.MOTOS
SOURCE
SOURCE
START
«TOP/P
HEADER
TK. LO»
LO»
f«-®
må P/P
OVER
"""«B
®J
CONT. MODE}
LOCAL
l
@J
FOLLOWI1
co
CN
IFOLLQ
U.MOTOR
OVER
LOAD (g
10
CM
SYSTEM
IT)
U MOTOR
WINDING
TtMP.HtCH
MOTOR
OVERLOAD
CD
rO
ro
ro
CD
ro
ro
CD
LT>
ro
•H—
300
PANEL CUT DWG.
NOTE
FAN
fHRUSTt
RU
STOP
®
1. COLOR OF FRONT FILM & PANEL SURFACE : MUNSELL N3.0
"
2. COLOR OF PANEL INSIDE : MUNSELL N3.0
SEMI-POLISHED
SEMI-POLISHED
-CONTROL POWER-
|
OFF
®J|i
'
ON
©J
| : INDICATOR LAMP
di
'OIUUERil
,
l ©i,
: PUSH BUTTON WITH LAMP
([J : PUSH LOCK WITH LAMP
3. COLOR OF INDICATOR & PUSH BUTTON
TB - M NAKASHIMA l
@: WHITE
(S):
GREEN
(R): RED
: PROTECTION COVER
(Y): YELLOW
2004.12.15
R
E
V
TITLE
BOW THRUSTER
W/H CONTROL PANEL
(PANEL CUT DWG.)
KTE
DRAW No.
KTM-0037-17-1
DISK No.
D4437BD2
SHEET
17
302
4-M4
522
--h
4-06
302
CD
«it
THRUSTER CONTROLLER
MAIN MOTOR
EM'CY STOP
CD
— ro
PO
SO
ICONT. STATION
ALARM
i W/H i
DC
SOURCE
H.VIOTOR
START
!NON- l
WING
I
AC
SOURCE
CONT. MODEF
CD
CM
®J
U.UOTOR
10
OVER
r«-®
tmr/p
HEADER
IX. LOW
LOW
um. P/P
CN
OVER
m
"""fl
CO
ro
CO
+-
to
300
LAUP
BUZZER
PANEL CUT DWG.
rp'1(L
NOTE
©J J^lUlP
RUM
1. COLOR OF FRONT FILM & PAN£L SURFACE : MUNSELL N3.0 SEMI-POLISHED
2. COLOR OF PANEL INSIDE : MUNSELL N3.0 SEMI-POLISHED
r
CONTROL POWER-,
: INDICATOR
,
LAMP
: PUSH BUTTON WITH LAMP
^J) : PUSH LOCK WITH LAMP
3. COLOR OF INDICATOR & PUSH BUTTON
[ Tffi - MNAKASHIMA
®: WHITE
(5):
GREEN
(R)
RED
(Y)
YELLOW
2004.12.15
R
E
V
PROTECTION COVER
TITLE
STERN THRUSTER
W/H CONTROL PANEL
(PANEL CUT DWG.)
KTE
DRAW No.
KTM-0037-18-1
DISK No.
D4437SD2
SHEET
18
420
o
O
o
O
O
r
sr=
1
ini
14-M4
384
o
O
a
L
i
CO
—I
m
o
O
l
1
-H
O
l~
f—
m
O
O
100
100
I
l
100
100
o
J
l
PANEL CUT DWG.
o
O
I
o
J-
O
O
O
ABT. 110
NOTE
1. COLOR OF FRONT FILM
2. COLOR OF CONTROLLER
3. COLOR OF INDICATOR &
(W): WHITE (R): RED (5):
& PANEL SURFACE : MUNSELL N3.0 SEMI-POLISHED
CASE : MUNSELL N3.0 SEMI-POLISHED
PUSH BUTTON
GREEN
CD : INDICATOR LAMP
Q
: PUSH BUTTON WITH LAMP
O
: PUSH LOCK WITH LAMP
2004.12.15
R
E
V
DRAW No.
TITLE
BOW & STERN THRUSTER
PORT WING CONTROLLER
KTE
KTM-0037-19-1
DISK No.
D4437PD3
T
SHEET
19
420
o
o
O
O
o
CO
i
fe
n
14-M4
384
o
o
or
Lu
l
l
o
o
o
i
er
o
fe
1
s—
(Ti
Z>
o
et
03
i
*— o
l,
i
o
100
o
J_
100 J-
o
100 -L
o
100 J
PANEL CUT DWG.
o
o
o
ABT.
110
NOTE
1. COLOR OF FRONT FILM & PANEL SURFACE : MUNSELL N3.0 SEMI-POLISHED
2. COLOR OF CONTROLLER CASE : MUNSELL N3.0 SEMI-POLISHED
3. COLOR OF INDICATOR & PUSH BUTTON
(W): WHITE (R): RED (5): GREEN
D
: INDICATOR LAMP
j
2004.12.15
|Tj| : PUSH BUTTON WITH LAMP ;
Q : PUSH LOCK WITH LAMP
".
j
i
R
E
V
DRAW No.
TITLE
BOW & STERN THRUSTER
ST'BD WING CONTROLLER
KTE
KTM-0037-20-1
DISK No.
D4437SD3
T
SHEET
20
FROM W/H
CONTROL PANEL
TERMINAL BOARD A
FROM W/H
CONTROL PANEL
i
CN6
TB6
TERMINAL BOARD B
TB7
340
350
J±:
JI
" THIS TERMINAL BOARD SHALL BE INSTALLED INSIDE OF THE CONSOLE STAND "
2004.12.15
TITLE
BOW/STERN TH RUSTER
TERMINAL BOARD A,B
DRAW No.
KTM-0037-21-1
DISK No.
D4437BD4
SHEET
21
TERMINAL BOARD
r
TO
W/H
FROM W/H
CONTROL PANEL
CONTROLLER
FROM W/H
'
( SHEET 3 )
TB2
._
n
TERMINAL BOARD A
CD
t>t
cM
K
AC220V 60Hz t\
POWER SUPPLY
«
r«
«
0
c
1
f
r
cQ
{
j
K
•4
^
cQ
t
FROM W/H
i
CONTROLLER
QQ
t-
C0
|
rSJ
f
Q3
^
u3
f
GQ
J
[
CONTROLLER
BATTERY DC24V
POWER SUPPLY
2M
r
CN6
TB6
<
D
Q3
a
'
*
<
p
<
V
GQ
C>J
D0
r<1
s
<
u
5 § <^P
* Qa
a3
Tt-
U•>
s
<
<
(1
0a
(13
a
0a
r
<
c
<C
cF)
<
rC
a3
a3
\
a3
cI)
>
T-
a
r*
<C
«-
< c5 <f 5 <Tf
a3 a3
c3
TFRMIMAI
L
ROARF)
R
D
a3 a3 af3
cg
•)
'
QQ
^t-
PORT WING PANEL
<N
m
<t < < < <C
rv a§ cS c1
cu
uT
a3 a3 3 a3 a3 3
u3 i- an] 0n c3 a
<
it
WING PANEL
W/H
CD
^
5 <lS
<
U
<
CONTROL PANEL
TB1A TB2B ,
TB1D—, EMSW
CM
m
m
CD
CD
2004.12.15 TITLE
BOW THRUSTER
TERMINAL ARRANGEMENT
DRAW No.
KTM-0037-22-1
DISK No.
D4437BTB1
SHEET
22
TERMINAL BOARD
r "
TO W/H CONTROL PANEL
FROM W/H
CONTROLLER
FROM W/H
1
CONTROLLER
( SHEET 4 )
T-\^
1
i i
O
=
' i
>
t/)
h
> >
u-
t/)
1
FR. W/H CON. PANEL
Z
^^---^__
^^-
^^^-^_
(/)(/)
Y Y
r
2M
Y Y
l
l
CONTROL
POWER
SWITCH
CONTR OL
POWE
SWITC H
(AC220V)
(DC 2 4V)
5 >
in (f)
5 S
LU ui
_
2M
l
'
A
—
CN4
CN3
' '^
w
TR7
b
i
i
•D
>
CL
^r
<
Q \^1 \i\ —. O c v j m
S 2 Z < 2 3 2
(/> tn t/> tf t/> c/> i/i
.- •«CD z s s ^
S ^
a
•*
o
a
r*
o
CM
*-
N
•-
(S
CS
A
TRÆ
T«~~l
-prjo
D/f
i
1
1
,
Q.tJl/1
(/> W (/>
«o
n
•-
TB2A EMSW
i
n
~
O O J « ^
lu IJ u
v> uy <n
»- n in co
M W O T «
S fe S S •
<N
U.
W
<
TERMINAL BOARD A
-^U.
W
Jl §i
g
ro
Q.
W
__
CD
^Q.
W
T5"!
z
to
' «« 1 ^ 1 •* 1
1 *> 1 ^ '
'
'
s
CM
Z
(O
Q.
t/)
w
±^ .. ..J 1
Z
A
J_,
A
A
FROM W/H CONTROLLER
SOLENOID
VALVE
AC220V 60Hz »1 BATTERI' DC24V
POWER SUPPLY
POWER SUPPLY
^^\__^
__^
2M
1J
1
=!
1
1
CN6
TR R
CD
CQ
CQ
CQ
CQ
CD
CQ
CQ
t
1
A F5ORT
rn
CD
CD co
«—*"•-«••)
CD
^< < s s
1
<2SS$;3;S?$s§g;i:?
D
L
TR7
CQ
< < S i ^ ^ ^ S ^ S ^ S S
CO
CD
T—
«—
, .
WING PANEL
* t o < o r ^ o 5 o . o
m
CQ
CQ
CQ
CQ
CQ
TB1A TB2B ,
^
CQ
ca^-o,^^««,^
W/H CONTROL PANEL
^
TB1D —, EMSW
_
m
'a ^
OD
•-
t> 5
5 S 5 S SS |
CQ
TERMINAL BOARD B
(/)(/>
»-
(/)OT
O
O
l
r-lM
( / ) ( / ) ( / ) ( / )
tiJUJ
~
<
< * "
<
CQ
00
CD
CT>
CQ
O
CD
«—
. ".: ' : " :: '.. . j i
j
ST'BD WING PANEL
C Q C D C Q C D C D f D C O C Q
K J * 1 0 U > , ^ 0 > 0 > 0
—.
^
$ ? s § s s s s
^
CD
1
A
2004.12.15
DRAW No.
TITLE
S i tIRN
1*
.
.
V
1
2
I
3
4
I
5
..
THRUSTER
T[~DK i t
IcKMI ^JAL ARRANGEMENT
DISK No.
KTE
6
7
SHEET
D4437STB1
8
23
9
_
A
A
DEGREE PLATE
NAME PLATE
BODY
MATERIAL : AL
4-012 DRILL
4-020 DP 3 \
r
~1
CPP45B
1
1
1
s
1
1
TCT-220
\
TYPE
j
\
t
\
B B B B
l
F
1
F F F
2 3 ^^
1
REVOLUTION RATIO.
1
SPROCKET : POT. -
1:1
± 56
STROKE(mm) PITCH AN
SCALE
1/1
DATE
2001. 11. 10
WORK NO.
WORK SHIP
APP'D
CHECK
CHECK
15
45.81
±140.15
NT
P.C.D
SHAFT
REVO.(DEG)
SPROCKET(RC35-9T)
BOW THRUSTER FOLLOWUP
TITLE.
D4437FB
DISK No.
PAINT COLOR
±25.77
TRANSMITTER LAY-OUT DWG.
DESIGN
DWG.
SHEET
NO. KTM-0037-24-0 NO.
7.5 BG 7/2
*KTE
1
|
2
1
J
1
1
5
1
ö
|
/
|
a
1
9
9A
Z4
DEGREE PLATE
NAME PLATE
BODY
r
CPP45B
2KC5
4
±50
TCT-200
TYPE
I
I
I
REVOLUTION RATIO.
PAINT COLOR
7.5 BG 7/2
SPROCKET : POT. = 1:1
WORK NO.
WORK SHIP
±25.68
STROKE(mm) PITCH ANGLE
SCAL£
1/1
DATE
DISK No.
APP'D
2001. 11. 10
D4437FS
CHECK
CHECK
TITLE
15
45.81
NT
P.C.D
SPROCKET(RC35-9T)
±125.)
SHAFT
REVO.(DEG)
STERN THRUSTER FOLLOWUP
TRANSMITTER LAY-OUT DWG.
DESIGN
DWG.
SHEET
NO. KTM-0037-25-0 NO.
HNO
U S E
4437/4438/4441
BOW/STERN THRUSTER REMOTE CONTROL SYSTEM
QUANTITY
ITEM
NAME OF
NO
PART
REMARKS
WORKING
OUTLINE
11
18
PER
SET
PER
VESS
SPARE
16
2
1
MIDORI
CPP-45B 4TAP
POTENTIOMETER
1.5mm
HEXAGON RENCH
80
»DT
12.5 .
.10
CONTROL RELAY
24
20.5
35.2
NAIS
DS2E-M-DC24V
24
20.9
CONTROL RELAY
HANKUK RELAY
HR705-4PL DC24V
27
12.8
20
CONTROL RELAY
28.6
-r
18
NAIS
JW2SN-DC24V
18
,15,
D
KT
COMM. CARD
COMMON CARD
40
20
HYBRID 1C
KT
ALARM. CARD
20
miiiimiL
2004.12.15
R
DRAW No.
TITLE
SPARE PARTS LIST
KTM-0037-26-1
V
KTE
DISK No.
SHEET
D4437SP1
No.
26
•
I
I
I
MESSRS
DAEWOO SHIPBUILDING &
MARINE ENGINEERING CO.,LTD
:
HNo. 4457/4458/4441
HYD.PUMP STARTER & LOCAL CONTROL BOX
FOR BOW/STERN THRUSTER
DRAWING No.
DATE
210x297(mm)
APPROVED
KTM-0038
JULY
1.
2004
FILE NAME:
D4437H
CHECKED BY
KTECo.,Ltd.
CHECKED BY
1497-1,8ong|«ong-Dong, OangMO-Ou,
Busan 618-270, Korea
T«I: +82-S1-265-O255 Fax:+82-51-265-0250
DESIGNED BY
S. H. OH
DD-25
PLAN HISTORY
REV.
A
DATE
D E S C R I T I O N
2004. 07. 01
SUBMITTED TO SHIPYARD
2004. 12. 15
REVISED BY SHIPYARD COMMENTS
( WITH MAKER REVIEW )
SHEET No.
7, 9, 10, 11, 12, 13, 14.
14-1, 15
CONFIRMED BY
i "-v
I,.*»*- &r
^
•
•
HISTORY
HYD.PUMP STARTER FOR BOW/STERN
H NO.
4437/4438/4441
CLASSIFICATION
QNV
OUTSIDE : N-7.5(light gray)
INSIDE
: MAKER STANDARD
AMBIENT TEMP.
45°
ENGLISH
MATERIAL OF
NAME PLATE
purwni ir
PHENOLIC
SHIP OWNER
A.P. Moller
KIND OF SHIP
45,000m2
PAINT COLOR
(MUNSELL No.)
DRAWING &
DOCUMENT
.
THRUSTER
PCTC
c
CABLE LEAD-IN
LOWER PORTION : COAMING TYPE
SIGNAL LAMP
BA9s, 24V 2W
OVERLOAD
PROTECTOR
THERMAL TYPE ; 2 PHASE WITH AMBIENT TEMPERATURE COMPENSATION
(MANUAL RESETTING SYSTEM)
SOURCE
CAPACITY
DEVISION
MAIN POWER
AC 440V
CONTROL
CIRCUIT
AC „20V
A0 ZZOV
3 ø
/
/
2(
A
60 Hz
3V, 10. 60Hz
HYD.PUMP STARTER FOR BOW THRUSTER
1
SET
HYD.PUMP STARTER FOR STERN THRUSTER
1
SET
LOCAL CONTROL BOX FOR BOW THRUSTER
1
SET
LOCAL CONTROL BOX FOR STERN THRUSTER
1
SET
1
SET
EM'CY STOP PUSH BUTTON BOX
FOR FORWARD AND AFT MOORING DECK
MATERIAL
COPPER
(SUF?FACE : TIN COATING)
R (U) (Z) RED
BUS BAR
IDENTIFICATION
OF POWER
T
PHASF ARRT
oTIuS
BAR
OF
BUS BAR
INTERNAL WIRING
P :RED
N :BLUE
s (v) (X) WH|TE
(W) (y) BLUE
PHASE
PHASE
pHASE
.
(R) 0 ^
® (v^
(T)
V
»EARTH WIRE : GREEN & YELLOW
POLE fP}
( }
POLE
W
"VIEWING FROM PANEL FRONT
LEFT
TOP FRONT
RIGHT
BOTTOM
REAR
MAIN CIRCUIT : 660V SCP (MORE THAN 2.0mm2 )
CONT. CIRCUIT : 660V SCP (or SYP) 1.25mm
660V SCP (or SYP) 0.75mrrf (LESS THAN 50V)
REMARK
HULL No.
ORDER No.
4437
4438
4441
KTM-04022 KTM-04023 KTM-0402"1-
BOW A0102-04
MALI IINERY No. CTITRM
A01 10-04
A01 18-04
A01 26-04
A0134-04
A01 42-04
DRAW No.
TITLE
R
E
V
210x297(mm)
CFNFRAI
SPFCIFICATION
""•Trie
KTE
KTM 0038 01
DISK No.
D4437S1
SHEET
No.
0
1
MANUFACTURER
RATED
CURRENT
TYPE
(A)
GOULD
1
500V
100
A5Y3-11
3
500V
100
A5Y5-11
5
500V
100
A5Y10-11
10
500V
100
A5Y15-11
15
500V
100
A5Y20-11
20
500V
100
A5Y25-11
25
500V
100
A5Y30-11
30
500V
100
A5Y40-11
40
500V
100
A5Y50-11
50
500V
100
A5Y60-11
60
500V
100
RATED
CURRENT
RATED
VOLTAGE
(AC.DC)
RATED BREAKING
CURRENT
•(KA)
AC500V
100
DC250V
50
AC500V
100
DC250V
50
AC500V
100
DC250V
50
AC500V
100
DC250V
50
AC500V
100
DC250V
50
AC500V
100
DC250V
50
AC500V
100
DC250V
50
AC500V
100
DC250V
50
AC500V
100
DC250V
50
AC500V
100
DC250V
50
AC500V
100
DC250V
50
TYPE
(A)
1
1
<5R
QR
1
"*
1 C?R s
1 QR
1
^R
1n
1S
1 ^R 9n
1-SB-25
1 t;n ^n
1 <;R dn
1-SB-50
1 <;R Rn
1
3
5
10
15
20
25
30
40
50
60
DRAW No.
TITLE
R
V
?10x?97(mm > >
RATED BREAKING
CURRENT
(KA)
A5Y1-11
MANUFACTURER
SB FUSE CO.. LTD.
RATED
VOLTAGE
(AC.DC)
BREAKING CAPACITY
LIST OF FUSE
UTE
KTM 00258-02-0
DISK No.
D4437S2
SHEET
No. 2
SWITCH GEAR ACCESSORIES
BASIC SYMBOLS
SYMBOL
DESCRIPTION
DESCRIPTION
SYMBOL
ONE CONDUCTOR OR A GROUP OF
SEVERAL CONDUCTORS
TWO CONDUCTORS
(MULTILINE REPRESENTATION)
DISCONNECTING SWITCH OR
MOULDED CASE CIRCUIT BREAKER
TWO CONDUCTORS
(SINGLE-LINE REPRESENTATION)
MOULDED CASE CIRCUIT BREAKER
,n CONDUCTORS
(SINGLE-LINE REPRESENTATION)
CROSSING WITHOUT ELECTRICAL
CONNECTION
(WITH SHUNT TRIP COIL)
BRANCH OF CONDUCTORS
UNDER VOLTAGE TRIPPING COIL
OF CIRCUIT BREAKER
JUNCTION OF CONDUCTORS
RESISTANCE OR RESISTOR
SWITCH (GENERAL) SINGLE THROW
RESISTOR WITH MOVING CONTACTOR
GENERAL SYMBOL
SWITCH (GENERAL) DOUBLE THROW
INDUCTANCE OR INDUCTOR
TERMINALS
CAPACITANCE, CAPACITOR
-TERMINAL MARK
RELAY COIL, GENERAL SYMBOL
CllC2lC3
P-2801
TPYC-2.0
HULL CONNECTION (EARTH)
• CABLE NO
• CABLE SIZE
BELL
TERMINAL
BUZZER
JOINT TERMINALS
MECHANICAL COUPUNG
GENERAL SYMBOL
EQUIPMENT OF OUTSIDE
SWITCH, GENERAL SYMBOL
THREE POLE SWITCH. SINGLE
REPRESENTATION
EQUIPMENT OF OTHER UNIT
CHANGE OVER CONTACT
BREAK BEFORE MAKE
POWER & RELAY CONTACT
MAKE BEFORE BR
CONTACT
(OVER LAP CONT
CONTACTOR NORMALLY OPEN
(MAIN)
CONTACTOR NORMALLY CLOSE
(MAIN)
CONTACT(GENERAL)
MANUAL CONTACT
MAKE CONTACTOR (a CONTACTOR)
GENERAL SYMBOL
BREAK CONTACTOR (b CONTACTOR)
GENERAL SYMBOL
MANUALY OPERATED AUTO
RESET CONTACT
-0
0—
O—
FUSE
MANUALY OPERATED AUTO RESET
CONTACT(WITH LOCKING DEVICE)
MECHANICAL
CONTACT
HAND-RESET CONTACT
(THERMAL RELAY)
GENERATOR
o—
MOTOR
SINGLE-PHASE TRANSFORMER WITH
SEPARATOR WINDINGS
RELAY CONTACTOR OR AUX.
SWITCH CONTACTOR
CONTACTOR WITH TIME LIMIT OPERATION
(ON DELAY TYPE)
CONTACTOR WITH TIME LIMIT OPERATION
(OFF DELAY TYPE)
AUTO-TRANSFORMER
THREE PHASE
LATCHING RELAY CONTACT
CURRENT TRANSFORMER
-W-
OF
SEMICONDUCTOR DIODE OR
RECTIFIER GENERAL SYMBOL
GANG SWtTCH MANUALLY OPERATED
RESIDUAL CONTACT
VOLTMETER
AMMETER
C CONTACTOR
INSULATION RESISTANCE METER
RUNNING HOUR METER
CONTROL SWITCH(CAM TYPE) OR
CONTROLLER CONTACT
INDICATING LAMP
DRAW No.
TITLE
R
BASIC SYMBOL
KTM-0038-03-0
E
V
DISK No.
D4437S3
SHEET
No.
3
GRAPHICAL SYMBOLS FOR ELECTRICAL APPARATUS
SYMBOL
DESCRIPTION
.
_CX^NC
0No
MANU
AUTO
2 No.1
1 pX^03 No.2
04 No.3
TEST
NOR
M
I
I
iiil«
V
t*
SYMBOL
DESCRIPTION
TIME RELAY (ON DELAY TYPE)
CHANGEOVER SWITCH
MANU : (1-2) ON,(1-3) OFF
iiirn • M 9^ nrrfi ^ nw
CHANGEOVER SWITCH
No.1 : (1-2)ON, (1-3) (1-4) OFF
No? • (1 3lON f1 7^ M 4l OFF
No.3 : (1-4)ON, (1-2) (1-3) OFF
TEST SWITCH FOR SEQUENCE
TEST NORMAL
NORMAL : (3-5) (4-6) ON
(1-5) (2-6) OFF
TEST
: (1-5) (2-6) ON
(3-5) (4-6) OF
IN rUI ON
-2) OFF
a
3^5-4-^4
=-o o
5
ON
(3-4)
o,n6
OFF
l
^0 bj OFF
SET TIME
3_
5
TIME RELAY (OFF DELAY TYPE)
IN PUT ON —i—
-2) orr
a
ON —i—
(3-4) OFF—1—
„4
6
Q^>
•' v »'
fc.
c\
nrr--.. 1 -
7
SET TIME
CONTROL SWITCH
(CAM SWITCH)
J_
_2_
_3_
STOP ALARM SIGNAL
88
^ n
i—0
4
—p-j-c^- —o
j
O-i
3C
1
X-N
o-4_{||)—
1
WHEN MANUAL STOP
(1-2) SLOW ACTION
(3-4) QUICK ACTION
88
1—i
1
44
1
.fFP
LAP
(g>CO!L_
'!'1
] MAIN
'I
CONTACT
J
'l'
CONTACTfl_l_0
^T — lAUX.
CONTACTbn | ^| CONTACT
6^)
MAIN MAGNETIC CONTACTOR
HEATER
JLcoNTA^T,
o-Je-o
J^ CONTACT
0
CONTACT
OVERCURRENT RELAY
MANUAL RESET TYPE
^-^ HEATER
COIL
@
1
i—i t
1 NOTCH
(1-3) ON, (2-4) OF
2 NOTCH
(1-3)(2-4) OFF
3 NOTCH
(1-3) OF. (2-4) ON
=^=
,
1
2
PUSH
J7
7
.
AUTO RESET TYPE
U J
AUXILIARY RELAY
b CONTACT
/^CLOSING COIL
g-^o CONTACT
1
b CONTACT
/^TRIPPING
COIL
\$\J
KEEP (LATCHING) RELAY
WHEN @ IS ENERGIZED
'a. CONTACT IS KEPT ON
'b. CONTACT IS KEPT OF
WHEN @ IS ENERGIZED
'a. CONTACT IS KEPT OF
'b. CONTACT IS KEPT ON
—
K
•
V
210x297(mm)
^DAnui^Ai cvunr
bKArrllOAL
bYMbl)LS FOR
n
rr>TDir>Ai
ADDA^RATUS
LLtl' 1 KIUAL f\rrF
"iTTE
i% 1 C
DRAW No.
KTM 0038- 04 0
DISK No.
D4437S4
SH EET
No
4
CONNECTION OF AUX. RELAYS
CONNECTION
TYPE
CONT.
TYPE
CONNECTION
CONT.
TYPE
CONT.
CONNECTION
TYPE
CONNECTION
H3BA-N
H3CR-G8EL
CTIME
2a+la
RELAY)
CTIME
2c
RELAY)
•MODE
"A"
"B"
"C"
"D"
"EP
(3A+1a1b)
+
(3A+1a1b)
HMR10
ON DELAY
FUCKER
ON-OFF DELAY
OFF DELAY
INTERVAL
A1
«•-»CSINIOCO««-
4c
MY
CONT.
SDV-F
(VOLTAGE
SENSOR)
S R 3 S 5
EI
SH-4/V
AI
"S n 5 S
CAD326( )
2a1b
3a2b
13
9
3B+2Q
B-A65
13
AI
3A+2Q
S-N12
i
A2
SRC502F/X
-H-H
LAD-N226
3a3b
*!2S?S
XSRS
2o2b
HMC20
3A+
1a1b
3
" " r
»O CM .
SC-1N~
SC-16N
3A+
2a
SC-05
A2
CM •<• æ J
3A+
2o2b
*- 10 « *- n
Bs £j
2o2b
HAB22
2a2b
2a2b
SZ-A22
TITLE
DRAW No.
CONNECTION OF AUX. RELAYS
KTE
4SOx297Crai>
2a2b
2s ny
HMX22
HMT22
HAB22
- 2 K) S2 fl ö
KTM-0038-05-0
DISK No.
D4437S5
SHEET
No.
v
w
CONTROL DEVICE NUMBERS & AN INDEX AND SUFFIX LETTERS
SYMBOL
No.
DESIGNATION
No.
2
3
4
TIME DELAY STARTING OR CLOSING RELAY
CONTROL SWITCH
MAIN CONTACTOR OR RELAY
70
START CONTACTOR OR SWITCH
CONTROL SOURCE SWITCH
FIELD REVERSING DEV1ED
SEQUENCE SWITCH
TEST SWITCH OR RELAY
OVER SPEED SWITCH OR RELAY
LOW SPEED SWITCH OR RELAY
ACCELERATING OR DECELERATING DEVICE
STARTING TO RUNNING TRANSITION RELAY
SOLENOID VALVE
THERMOSTAT TtMHtKAIUKt CÜNIKÜL KtLAY
SYNCHRONISM CHECK DEVICE
77
80
81
83
84
SR
72
RHEOSTAT
DC CIRCUIT BREAKER OR MAGNETIC
CONTACTOR
RRFAKINf nFWPF
6
8
9
10
11
1?
14
18
19
2Ü
23
26
27
28
79
30
33
34
40
42
43
47
48
49
51
TEMPERATURE RELAY FOR STATIC
APPARATUS
A.C UNDER VOLTAGE RELAY
ALARM DEVICE
FIRE EXTINGUISHING DEVICE
ANNUNCIATOR OR CONDITION OF APPARATUS
POSITION SWITCH OR DETECTOR
MOTOR OPERATED SEQUENCE SWITCH
FIELD SWITCHING DEVICE
RUNNING CONTACTOR OR SWITCH
CHANGE OVER SWITCH. CONTACTOR OR
RELAY FOR CONTROL CIRCUIT
OPEN OR REVERSE PHASE VOLTAGE RELAY
OVERDUE DETECT RELAY
TEMPERATURE RELAY FOR ROTARY MACHINE
AC OVER-CURRENT RELAY OR
OVER-CURRENT GROUND RELAY
AC CIRCUIT BREAKER OR CONTACTOR
AC OVER VOLTAGE RELAY
TIME DELAY STOPPING OR OPERATING RELAY
PRESSURE SWITCH OR RELAY
GOVERNOR
FLASHER RELAY
AC DIRECTIONAL POWER RELAY OF
67 DIRECTIONAL GROUND RELAY
5?
59
62
63
fiü
66
69
88
89
90
91
94
95
LOAD UMIT DEVICE
DC UNDER VOLTAGE RELAY
GOVERNOR DRIVING DEVICE
SELECTIVE CONTACTOR SWITCH OR RELAY
VOLTAGE RELAY
BLOCKING RELAY
MAGNETIC CONTACTOR OR SIWTCH FOR
GENERAL MACHINE
DISCONNECTING SWITCH ISOLATOR
AUTOMATIC VOLTAGE REGULATOR
AUTOMATIC POWER REGULATOR OR
POWER RELAY
A
SYMBOL
NAME
DESIGNATION
NAME
ALTERNATOR
FAILURE
AMMETER
FORWARD
AUTOMATIC
FREQUENCY
ANN
ANNUNCIATOR
AS
AMMETER TRANSFER
AUX
AUXILIARY
F
FS
NAME
NEUTRAL
N
TEMPERATURE
TIME
OPERATION
OVER CURRENT
TRANSFOMER
0
OCR
POSITIVE POLE
HOLDING
POWER
HOT WATER
PRESSURE
HW
T
TH
TRIPPING
TERMINAL BLOCK.
TERMINAL BOARD
THERMAL RELAY
TG
TORGGLE SWITCH
TB
PRIMARY
CLOSE
TRIP-FREE CONTACTOR RELAY
AUTOMATIC FREQUENCY REGULATOR OR
FREQUENCY RELAY
PF
POWER FUSE
INNER PART
PS
INSTANT
PT
PREESSURE SWITCH
POTENTIAL
TRANSFORMER
P
COOLING
COMMON
CLOSING COIL
1
CONTROL
IL
ILLUMINATING LAMP
ITER
INTERLOCK
OIL
Q
CONDENSER
C
CH
COS
CP
CT
OVER
§wrW~
CAUTION PLATE
CURRENT
TRANSFORMER
RESISTOR
UMIT
RELAY
LOAD
REVERSE
R
LOCKING
L
LOWER
RT
RECTIFIER
DISCHARGE
LS
LIMIT SWITCH
RIGHT
DECELERATION
LVS
LEVEL SWITCH
RUN
VS
VOLTAGE REGULATOR
VOLTMETER CHANGEOVER SWITCH
WATT
w
WATER
AUXILIARY
X
NORMAL INPUT
AUXILIARY
INVERSE INPUT
Y
EMERGENCY
MANUAL
SWITCH
EXCTTOR
MAGNETIC
SECONDARY
EARTH LAMP
MAIN
SHORT
EMERGENCY STOP
ES
VR
MOTOR
DOWN
E
V
REMOTE
DIODE
EL
VACUUM
VOLTAGE
RESET
LOW
DIRECT
D
LAMP
UP
U
RAISE
CHARGE
EARTH TEST TRANSFER
SWITCH
FLOW RELAY
S
METER
M
R
E
V
AUXILIARY
ZCT
STOP
MC
MAGNETIC CONTACTOR
MCCB
CIRCUIT BREAKER
STR
MCS
MOLDED CASE SWITCH
SL
STARTING RELAY
SIGNAL LAMP,
PILOT LAMP
CONTROL DEVICE NUMBERS
& AN INDEX AND SUFFIX
LETTERS
"KTE
BUZZER
Z
START
TITLE
r«0x29/(mm)
SEA WATER
OPEN
HIGH
ELECTRIC BUZZER
SOLENOID VALVE
sw
ON(CLOSE)
BUS-BAR
BZ
SV
aOAT SWITCH
GROUND FAULT
H
STARTER
OFF(OPEN)
HEATER
BELL
S
NAME
STT
FUSE
BATTERY
BEL
STU3CX.
NEGATIVE POLE
GENERATOR
G
B
STUBOL
ZERO PHASE SEQUENCE
CURRENT TRANSFOMER
PHASE
ø
DIAMETER
DRAW No
KTM
DISK No.
D4437S6
DO"IR
nc
SHEET
No.
6
n
No.
SYMBOL
1
52
2
88
PART
MOLDED CASE
SWITCH
SPECIFICATION
TYPE
HBS-63C
MAGNETIC
CONTACTOR
SC-5-1
MAGNETIC
CONTACTOR
cr* HR
2
51
THERMAL RELAY
TR-5-1N
51-1
THERMAL RELAY
TR-ON
2-1
3
4
60/30A
Q'TY
REMARK
FIXED
AC220V 60Hz
AC220V 60Hz
AC220V 60Hz
MAKER
2
HYUNDAI
2
FUJI ELEC.
4
FUJI ELEC.
9-1 3A
SET : 10.3A
2
FUJI ELEC.
2.2-3.4A
SET : 2.6A
2
FUJI ELEC.
5
23X.33X.63X
33Y.63Y.4X
51X.5X
CONT. RELAY
CAD-326M7
AC220V 60Hz
3a2b
16 TELEMECANIQUE
6
33Y.63Y.
51X.4X
AUX. RELAY
CAD-N226
AC220V 60Hz
2a2b
8 TELEMECANIQUE
7
33T.63T
TIME RELAY
AC220V 60Hz
WITH SOCKET
4
OMRON
8
A
AMMETER
2
RISESUN
9
WL
PILOT LAMP
XB5-AV61
BA9s. 24V. 2W
2 TELEMECANIQUE
10
RL
PILOT LAMP
XB5-AV64
BA9s, 24V, 2W
6 TELEMECANIQUE
11
BL
PILOT LAMP
XB5-AV66
BA9s. 24V, 2W
2 TELEMECANIQUE
12
ÖL
PILOT LAMP
XB5-AV65
BA9s, 24V, 2W
2 TELEMECANIQUE
13
3-11L
PUSH BUTTON
XB5-AA35
2 TELEMECANIQUE
PUSH BUTTON
XB5-AA25
2 TELEMECANIQUE
U
A
3-11R
A
H3BA-N
0-20-60A
BE-48
15
3C
PUSH BUTTON
XB5-AW3365
16
3-0
PUSH BUTTON
XB5-AA45
2 TELEMECANIQUE
17
SHS1.SHS2 SELECTOR SWITCH
XB5-AD25
6 TELEMECANIQUE
18
T
TRANSFORMER
200VA
19
F1.F2.F3
FUSE
SB-C1
20
F4.F5.F6.F7
FUSE
21
RHM
RUN HOUR METER
WITH LAMP
BA9s, 24V, 2W
2 TELEMECANIQUE
10, 60Hz
2
KOC ELEC.
3A
WITH BASE
6
SB FUSE
SB-C1
1A
WITH BASE
8
SB FUSE
TH148S
AC 220V
2
NAIS
AC440/0-20-220V
22
23
A
R
E
V
2004.12.15
TITLE
DRAW
PARTS LIST
N D.
KTM -003 8
.f.—
DISK No.
"ViE
D4437S7
07
SHEET
No.
1
7
TYPE : CL
TYPE : CLA
TYPE : 04A
TYPE : 06A
i »3.5
Morte (on» 0, 01, 02, 9 »P»j/03 5
(2) MODEL
CD
o
Typo : B
Typ« ! A
,1—
NAME
—u
I1
NAME
NAME
TYPE : DMI
Type : D
Type : C
TYPE : TG1
TYPE : DM4
TYPE : TG2
NAME
IcobK »I»»
Type : M
Type : L
M^t rx>.
|
N AM t
,1
T|
NAME
Il
NAMt
1'
(4)
LETTER
TYPE : G
LETTER
1. APPLICATION : CLA,04AJG1.TG2
2. MATERIAL
: PHENOLIC
3. LETTER : BLACK
3. GROUND
: CL.06A.DMI.DM4
4. LETTER
^
1
NAME
ItymMI
(3)
|
•*•
1
Inrtlno |
liynboll
NAME
I
NA
LETTER EXAMPLE
1. MATERIAL
: PHENOLIC
2. GROUND
: WHITE
FRAME
: 60, 100, 225, 250, 400, 1600
3. LETTER
RATING
: 15A.400A.INST1000A
4. 'AH', "GH". 'JH' Type : odhesive Type
type
a
0 315
01 400
02 250
45
1
2 50
3 50
4 63
5 63
6 90
420x297<nn>
c d
b
63 300 50
63 380 50
63 235 50
10 38 12 43 20 43 16 53 25 53 25 80 -
t
3
3
3
2
2
2
2
2
2
type
a
b
c«
CL
42
53
30
CLA
35
45
23
06A
60
42
31
04A
48
34
23
d(s>)
-
DMI
55
55
8
3
DMJ
45
45
25
-
TG1
20
40
13
-
TG2
30
50
13
-
LrotinjJ
CIRCUIT No.: P0101, F123, 01. M19
CABLE SIZE : TPYC-80
: BLACK (RAT1NG:RED)
type a
c
d
b
7 100 31 90 8 100 45 90 9 200 50 190 40
10 40 12 - 11
33 16 - 12 50 30 43 13 80 25 70 14 90 30 80 -
t
2
2
3
2
2
2
2
2
EXAMPLE
2. MATERIAL : ALUMINUM
1. APPLICATION
Type : JH
(5)
EXAMPLE
TITLE
: WHITE
: BLACK
REMARK
DRAW No.
NAME PLATE MQDEL
KTE
KTM-0038-08-0
DISK No.
D4437SB
SHEET
No.
8
USE
mm
wr
~^^^
A
B
C
D
F
G
H
l
Kg
05
06
330
430
530
530
205
205
205
205
12
12
12
15
6
6
6
6
380
480
590
590
350
450
550
550
200
200
200
200
15
20
25
35
100x50
08
10
280
280
330
380
14
18
19
20
23
430
480
530
530
530
580
730
830
930
205
205
255
255
15
15
15
15
6
6
6
6
6
300
300
350
350
350
100x50
150x50
150x50
15
600
750
850
950
950
40
60
70
80
930 305
640
790
890
990
990
90
150x50
24
25
530 1030
580 1030
305
255
15
15
6
6
1090
1090
1050 350 110
1050 350 90
150x50
250x50
26
580 1030
305
15
6
1090
1050 350 105
250x50
27
580 1230
305
19
6
1290
1250 350 115
250x50
28
580 1430
305
19
6
1490
1450 350 125
250x50
29
580 1630
305
19
6
1690
1650 350 135
250x50
fo"^?i
O
l 5NP1I
2'_.
S3
4r
n
5(
6(
7(
g(
9(
i
i
LJ
DIMENSION
NO
150x50
AMMETER
SOURCE
W
11 OIL HEATER(ON-OFF)
2
RUNNING/START
G
12 SPACE HEATER
3
STOP
R
13
4
LOCAL-REMOTE
B
14 DOOR
5
OVER LOAD
R
15 RUNNING HOUR METER
6
LOW PRESS.
R
16
7
LOW LEVEL
R
17
8
LAMP TEST
B
18
RESET
9
l
l
10 OIL HEATER
A
B
19
0
20
B
SPACE HEATER(ON-OFF;
NAME PLATE TYPE : 04A, SNP1.2-7A
t
V
D G D GG
100x50
1
i
EARTH LINER
(M8x35L
100x50
100x50
A
i
QUO
COAUINC SIZE
ITEM No.
STARTER NAME
SNP1
1
HYD.PUMP STARTER FOR BOW THRUSTER
SNP1
2
HYD.PUMP STARTER FOR STERN THRUSTER
CABLE ENTRANCE
COAMING (150x50)
ENCLOSURE
2004.12.15
TITLE
D IP22
HYD.PUMP STARTER
FOR BOW/STERN THRUSTER
D IP23
• 1P44
DRAW No.
KTM-0038-09-1
DISK
No.
D443701
420x297(mm) 1
SHEET
No.
9
5.5 KW
HYD.PUMP STARTER FOR BOW THRUSTER
USE
2-1
51-1 (SET": 2.«)
OIL HEATER
2KW, 2.6A
60/30A
AC 440V
3» 60HZ
S
M
0-20-60A
"
J4 (SET : 10.3)**—2'° _mm. .
X X
MOTOR
5.5KW. 10.3A
°
F1(3A)
^~****-^ 2.0 mm*
0
T (200VA)
2
"^Vb
4
rr-i
F3(3A)
3
^ *'*OV/0-20-220V 5
«1
rx_
F^A)
xü<
LAMP TEST
JJX.
^_
13
14
. p
^
~° °— r^-i^)—
2^1
,
jy
, y—^
sy
,
33Y
,
RUNNING
OIL HEATER
2-1
• •
63Y
51 X
LOW PRESS.
OVER LOAD
TANK. LOW LEVEL
33Y
SHS2
,.
3^1 R
SOURCE
51-1
?1X
1.
SC-05
1o1b
STANK. LOW
'• LEVEL
t«
(RESET)
. . 1
BK1L J=*_JSK2
/o~
^
20
V^
rt
.
|
33Y
21
22
63X
LOW PRESS.
_r
r
CAD-326M7+LAD-N228
3o2b+2o2b
-!5{63T)2-
H3BA-N MODE "A"
SET 5 SEC
__,_, i
^^
CAD-326M7
3o2b
—«-«i
51) (
i
43
r
x
*-o BE1 LOW PRESS.
^-o BE2 HEADER TANK
LOW LEVEL
-oBE4 OVERLOAD
i5
,83Y
plTfifcJ^
'25 f^[
THllJ=*-JTH2
51
^
3a2b
\O^
TR-5-1N
oE1 \
4X
L_y L
irx-ju
30
„27
32
«DEC
i
CAD-326M7+LAD-N22S
3o2b+2o2b
|
i
• «•——«BMC HYD.PUMP MOTOR
I
^
^cy
ÜT~Ä~
63Y
SET 10 SEC
3o2b
i
^
2«
31 /7^\
|ji5
o £3
t W/H
4X
CAD 326M7
3a2b
vcy
.T-'TL
HYD.PUMP
I
MOTOR RUN |
°
c
52
orOBP4N
JL
J BP»
n ppls
BP5
j E.C.C
|
.
A
FROM ELC.C
«E2
M (^) CAD-326M7
3o2b
rROM W/H
CONT. PANa
OBPS)
rc"ä~~r
** ^
l
l
TES
4X
51)^33^.
r*^^
—(RHM)—
33 l
SC-5-1
2a
A
s~*
(^} |
^«r
A
SOURCE
Pn-,
AC 22W, 1», 60HI
( SHIPYARD SUPPLY ) T ^
F50A)
34
2
R
E
V
SPACE HEATER
I
39
" ai)
„.
33
40
F6(1A)
A
BL H
^""""*'^
2004.12.15 TITLE
SCACt HtAILK
(Element Heating)
^^^^ 1.25 mm'
CONNECTION DIAGRAM
( HYD.PUMP STARTER
FOR BOW THRUSTER )
""•Tvc
•^TE
DRAW' No.
|<-rM-0038-10-1
DISK N o.
D4437BID1
SHEET
10
.... —^r —
R
POWER SOURCE AC440V. 30, 60Hz 1
TPYC-6
-^
S
T
j
BMC
POWER SOURC AC220V, 10, 60Hz ,— Ro
TPYC-1.5
•— To
TPYC-2.5
[~
MPYC-2
—l MPYC-2
l
BH —Il5c
HYD.PUMP LOW PRESS.
(OFF AT ALARM)
r-*-»— BB
m-M
l
BM1 ^
BM2
BEG
BE1
BE2
BE4
BE6
READY TO START
f"0 °~*— *-*-*—
[HYD.PUMP RLJN
HYD.PRESS.NC3RMAL
HEADER TANK
LEVEL NOR MAL
"
r— BB
1— BH
HS
RK9
20=
TPYC-2.5
BNR1
1
E1
HYD.PUMP f E2
START.STOP
E3
ABNORMAL A -ARM
° °
l •—• *—• •—•
DPYC-1.5
—
A
M/MOTOR STARTER
1— ]
MPYC-7
A
"-
E.C.C
F.5
r— TH1
L TH2
BAB1
MPYC— 2
OACI9
r HYD.PUMP LOW.PRESS
/•""V- HR 3
W/H CONTROL PANEL
r— BK1
HEADER TK. LOW LEVEL
(OFF AT ALARM)
r~*-»— TH1 —i MPYC-2
1
—lise
: TH2
THERMOSTAT(OFF 10')
•-
^S-
BP4
HYD.PUMP ["
BP5
START.STOP |_
BP6
HrD.PUMP RUN |
MPYC-2
MPYC-19
[^
W
i— SH1
l— SH2
TANK
(X_X h- HT
«_J
U
"
,-«_»— BK1 —|
l
n K7
o o
j
20c
SPACE HEATER f^WM 15o
20W
HEADER
l
HYD.PUMP L OW.PRESS
HEADER TAN
HYD.PUMP C VER LOAD
HYD.PUMP UNIT
HYD.MOTOR
f^T\
5.5KW, 10.3A \~J
l
HYU.PUMH RUN
HEADER TANK LOW LEVEL
M/MOTOR STARTER
MPYC-7
'-HYD.PUMP OVER LOAG
FAN MOTOR STARTER
HR
HS
L
HT
|
OIL HEATER
2KW, 2.6A
HYD.PUMP STARTER
FOR BOW THRUSTER
A
R
E
V
2004.12.15 TI TLE
HYD.P UMP STARTER
TLjDiie-r^D
30W THRUSTER
FOR E31-iu/
mfffS
•V**-
DRAW N
°"
KTM — 0038— 1 1 — 1
^^^^
DISK No.
D4437BB1
SHEET
11
USE
HYD.PUMP
5.5 KW
STARTER FOR STERN THRUSTER
_.
2-1
. 2J-3.4A
51-1 (SET : 2.«)
OIL HEATER
2KW. 2.6A
Ro
3» 60Hz
MOTOR
5.5KW. 10.3A
s
41
£2.
r
•
° SMC HYD.PUMP MOTOR
*2-oSM2 RUNNING
°
HEADER TANK
LEy^
OVERLOAD
LOW
rAsSsS*.
READY TO START
50.
|
FROM LOCAL
CONT. BOX (RPB)
o jpg
FROM W/H
CONT. PANEL
51JC.33Y 6V3Y
-«-A-Ii^V-»^ SAB1 ABNORMAL ALARM
«SA82
oE1 V.
A
I« |
1
l_
3-0
1 o^o
«E3
ID
i
JE3
FgU)
3«
\
$]
F7(1A) 3a ' r^f_A
—±3
1 ^BLH SPACE
R
E
V
f
HEATER
"CE HEATER
35
To
2004. 12.15
^E*
52 „
38 2
(Be Tient Hooting)
40
>^
•^^ 1^5 mm'
F6(1A)
A
° °
20
OOff
o, ^
HYD.PUMP
I
MOTOR RUN
33 |
A
AC 220V. It, BBHz
( SHIPYARD SUPP1Y )
FROM E.C.C
«
TITLE
CONNECTION DIAGRAM
( HYCXPUMP STARTER
FOR STERN THRUSTER )
TCTE
aaov^ow
DRAW No.
KTM-0038-12-1
DISK No.
D4437SD1
SHEET
12
—^pl—
1
•" ^f
•
POWER SOURCE AC30440V 60Hz
TPYC-6
A
[~ R
S
j_
T
POWER SOURC AC220V, 1(8. 60Hz ,— Ro
TPYC-1.5
'— To
h4YD.PUMP
RUN
l
o o
SMC
SM2 —
MPYC 1 9
SEC
HYD.PUMP UNIT
HYD MOTOR
/^TT^
5.5KW, 10.3A (^£)
TPYC-2.5
r—«—»— SB
l
SH
HYD.PUMP LOW PRESS.
(OFF AT ALARM)
l
20c
MPYC-2
orAOfc. HLAILK |^A/V\ —
15c
20W
U
V
W
|— SH1
l— SH2
l
HYD.PUMP
SE1
HEADER T \NK LOW LEVEL —•_•—SE2
HYD.PUMP OVER LOAD
'
•_•
SE4
—n
MPYC-2
—Il5c
SB
l— SH
r-
SNR1
READY TO START F° °-*-*-*-*SNR2
r HYD.PUMP RUN
HYD.PRESS».NORMAL
L HEADER T)
SP4
, HYD.PUMP
f SP5
LEVEL N DRMAL
~~ START.STOP |_
SP6
C1
HYD.PUMP f C2
"" START.STOP
C3
C4
HYD.PUMP RUN [
C5
( WITH VOLT)
HEADER TANK
(-«—•— SK1 —, MPYC-2
'
SK2 — Jl5o
HEADER TK. LOW LEVEL
(OFF AT ALARM)
f— SK1
l— SK2
j-«_j— TH1 —, MPYC-2
'
TH2 —M5c
THERMOSTAT(OFF 10')
r— TH1
I— TH2
/—N^_ HR
(VV^~
^HS
HT
OIL HEATER
2KW, 2.6A
:
TPYC-2.5
20o
HR
HS
L
HT
|
ABNORMAL ALARM
[-HYD.PUMP LOW.PRE.SS
HEADER TANK LOW LEVEL
L HYD.PUMP OVER LO*"
p*—•-«-*—«—*— SAB1
SAB2
HYD.PUMP
f
START.STOP [_
HYD.PUMP RUN |
( DRY CONTACT )
° °
n
J
DPYC-1.5
1
•"
^,.
M/MOTOR STARTER
••
LOCAL CONTROL BOX (RPB)
"•
M/MÜTÖR STAKT LK
i—i
MPYC 7
~i
J
MPYC 2
E1
E3
E4
'
E5
MPYC-7
A
HYD.PUMP STARTER
FOR STERN THRUSTER
A
R
E
V
2004.12.15 TITLE
HYD.PUMP STARTER
DRAW
N
°"
FOR STERN THRUSTER
TrwE"ViE
DISK No.
D4437SB1
SHEET
13
FRONT VIEW
REAR VIEW
SIDE VIEW
80
20c
_
60
tr
NOTE
1. COLOR : MAKER STANDARD(GRAY)
1
RUNNING/START
G
2
STOP
R
2. MATERIAL
: ACRYLONITRILE
BUTADIENE STYRENE
(NON-INFLAMMABLE)
3. WEIGHT : 0.5KG
o
C11
o
C12
CONNECTION DIAGRAM
NAME PLATE TYPE : 2A
No.
1
NAME
SYM.
EM'CY STOP FOR
SNP
BOW THRUSTER
2004.12.15
R
E
V
TITLE
CABLE
GLAND
CONN.
P.B W/LAMP
SETS
DIA.
GREEN
1
20C
#1
Q'T
LOCAL CONTROL BOX (RPB)
FOR BOW THRUSTER
KTE
LOCK
P.B
RED
Q'T
XB5-
1
AH45
ENCLOS.
PROTEC.
IP56
DRAW No.
KTM-0038-14-1
DISK No.
D4437RPB
SHEET
14
FRONT VIEW
REAR VIEW
SIDE VIEW
95
75
140
122
20c x 2
.4-04.4
NOTE
1. COLOR : MAKER STANDARD(GRAY)
1
RUNNING/START
G
2
STOP
R
2. MATERIAL
: ACRYLONITRILE
BUTADIENE STYRENE
(NON-INFLAMMABLE)
3. WEIGHT : 0.95KG
2
-n * n-
o
C12
O
C11
CONNECTION DIAGRAM
NAME PLATE TYPE : 2A
No.
NAME
SYM.
CABLE
GLAND
1
SNP2
EM'CY STOP FOR
STERN THRUSTER
2004.12.15 TITLE
1
20C
P.B
CONN.
P.B W/LAMP
DIA.
GREEN
Q'T
RED
Q'T
XB5-AW
3365
1
XB5-
AA45
1
HYD. OIL PUMP
SNP1
R
E
V
SETS
LOCK P.B
RED
Q'T
XB5-
1
IP56
#1
AH45
LOCAL CONTROL BOX (RPB)
FOR STERN THRUSTER
KTE
ENCLOS.
PROTEC.
DRAW No.
KTM-0038-14-1-1
DISK No.
D4437RPB
SHEET
14-1
120
=0"
SIDE VIEW
NOTE
1
RUNNING/START
2
STOP
1. COLOR : RED
IN AN EMERGENCY
BREAK THE GLASS
AND PUSH THE BUTTON
2. MATERIAL
: STEEL PLATE
3. WEIGHT : 1.7KG
2
i
2
O t O
1
|
(>
E;?
(>
E1
O 4
O
1
c1
E3
()
E'1-
NAME PLATE TYPE : 2A
No. SYM.
NAME
EM'CY STOP FOR
1
SNP
2
SNP
CABLE
GLAND
CONN.
P.B W/LAMP
SETS
DIA.
GREEN
1
20C
#1
AH45
1
20C
#2
AH45
BOW THRUSTER
EM'CY STOP FOR
STERN THRUSTER
Q'T
2004.12.15 TITLE
R
E
V
LOCK P.B
RED
XB5-
XB5-
Q'T
ENCLOS.
PROTEC.
1
IP56
1
IP56
DRAW
EM'CY STOP BUSH BUTTON BOX FOR
FORWARD AND AFT MOORING DECK
KTE
NO.
KTM-0038-15-1
DISK No.
D4437ES
SHEET
15
HYD.PUMP STARTER &
LOCAL CONTF?OL BOX
FOR BOW/STERN THRUSTER (CC MMON
PAGE NO.
SPARE
USE)
BOX No.
SUPPLY PER SHIP
No.
1
NAME
S K E T C H
MAGNETIC
CONTACTOR
4
5
BULB FOR
SIGNAL LAMP
6
FUSE
7
LAMP TONGS
FUSE PULLER
8
SPARE PARTS BOX
9
:
r|-
-am. f— y\
SC-5-1, AC220V
4
1
SC-05, AC220V
16
2
3o2b
CAD-326M7, AC220V
8
1
2a2b
CAD-N226, AC220V
4
1
H3BA-N. AC220V
18
18
BA9S 24V 2W
8
8
SB-C1, 1A
6
6
SB-C1, 3A
-
1
-
1
U
»
AUX. RELAY
TIME
RELAY
1
=^
(56 O
3
2
$
C
o pp
«»«
CONTROL RELAY
SPARE
=r^
IH
2
REMARKS
WORKING
IÉ
3
3
u
B
«^-•^ e
'
(
^f
(
O ) Xn3
o — ^—t
/ 1
w
/
i
STEEL BOX
350x200x200(WxDxH)
1
10
D R AV/ No.
TITLE
R
E
V
l<vTM
SPARE PARTS LIST
_
•*TE
DISK
nn^R 1 R n
No.
D4437SPL1
16
•
I
I
•
BIBLIOGRAPHY
OWNER
A.P.MOLLER
SNO.
H-4437/38/41
SHIPYARD
DNV
DAEW
°° SHIPBUILDING
& MARINE ENGINEERING CO., LTD.
BOW THRUSTER (TCT-220)
STERN THRUSTER (TCT-200)
ELECTRIC PART
- REMOTE CONTROL SYSTEM
- HYD. PUMP STARTER / LOCAL CONTROL BOX
SPARE PARTS & TOOLS LIST
~KTE KTE Co.,Ltd.
MECHATRONICS DIVISION
- BUSAN. KOREA -
APPROVED
CHECKED
^ i^y^
_—^
DRAWN
V . $. £i^
TRACED
y
£. ^\}L^
DATE
Dec. 15, 2004
DWG. NO.
KJ9630-001-0
HNO
USE
4437/4438/4441
BOW/STERN THRUSTER REMOTE CONTROL SYSTEM
QUANTITY
ITEM
NAME OF
NO
PART
REMARKS
WORKING
OUTLINE
11
18
PER
SET
PER
VESS
SPARE
16
1. .2
MIDORI
CPP-45B 4TAP
POTENTIOMETER
1.5mm
HEXAGON RENCH
80
'ET
10
12.5.
CONTROL RELAY
24
20.5
35.2
24
NAIS
DS2E-M-DC24V
20.9
CONTROL RELAY
HANKUK RELAY
HR705-4PL DC24V
27
.12.8
20
CONTROL RELAY
28.6
18
18
0
COMMON CARD
NAIS
JW2SN-DC24V
KT
COMM. CARD
40
20
HYBRID 1C
20
KT
ALARM. CARD
IIIIIIIIIIIL
2004.12.15
R
DRAW No.
TITLE
SPARE PARTS LIST
E
V
KTE
KTM-0037-26-1
DISK No.
D4437SP1
SHEET
No.
26
PAGE NO.
HYD.PUMP STARTER & LOCAL CONTR OL BOX SPARE
FOR BOW/STERN TH RUSTER (CC MMON USE)
BOX No.
SUPPLY PER SHIP
No.
1
NAME
MAGNETIC
CONTACTOR
S K E T C H
REMARKS
WORKING
SPARE
2
1
SC-5-1. AC220V
4
1
SC-05, AC220V
16
2
3a2b
CAD-326M7, AC220V
8
1
2a2b
CAD-N226, AC220V
4
1
H3BA-N. AC220V
18
18
BA9S 24V 2W
8
8
SB-C1, 1A
6
6
SB-C1. 3A
0 ) XII
-
1
O—IH—\
-
1
1
Q[
o op
2
CONTROL RELAY
***
—=f=—
Wfflffl
ÖÖO
3
4
5
AUX. RELAY
TIME
RELAY
FUSE
7
LAMP TONGS
FUSE PULLER
8
SPARE PARTS BOX
9
'
©
BULB FOR
SIGNAL LAMP
6
tB
[J
IE
3
B
D
3
\
^
^
]
/
\
t
STEEL BOX
350x200x200(WxDxH)
1
V
*
10
TITLE
R
E
V
y No.
1R n
FfTM nn~^R
DRAV
SPARE PARTS LIST
"KTE
DISK No.
D4437SPL1
16
•
I
I
•
I