1
UNIVERSITÀ DEGLI STUDI DI TRIESTE
Sede Amministrativa della Scuola di Dottorato di Ricerca
Posto di Dottorato attivato grazie al contributo dell'Istituto Ortopedico Rizzoli di Bologna
XXII CICLO DELLA SCUOLA DI DOTTORATO DI RICERCA IN
INGEGNERIA CIVILE E AMBIENTALE
INDIRIZZO: INGEGNERIA DELLE STRUTTURE
SVILUPPO, VALUTAZIONE E APPLICAZIONE
DI METODI NUMERICI ALTERNATIVI AL
METODO DEGLI ELEMENTI FINITI
IN PROBLEMI DI BIOMECCANICA ORTOPEDICA
Settore Scientifico Disciplinare ICAR/08
DOTTORANDO
ING. MARTINO PANI
RESPONSABILE DOTTORATO DI RICERCA
PROF. IGINIO MARSON
RELATORE
PROF. ENZO TONTI
UNIVERSITÀ DEGLI STUDI DI TRIESTE
ANNO ACCADEMICO 2008/2009
Indice
Introduzione
1
1 La creazione di modelli numerici subject–specific di segmenti ossei
1.1 Scopi e ragioni dell’analisi . . . . . . . . . . . . . . . . . . . . . .
1.2 Criteri di applicabilità . . . . . . . . . . . . . . . . . . . . . . . .
1.3 La definizione di un modello . . . . . . . . . . . . . . . . . . . .
1.3.1 La Tomografia Computerizzata (CT) . . . . . . . . . . . .
1.3.2 La costruzione della mesh dai dati CT . . . . . . . . . . .
1.3.3 Definizione delle proprietà meccaniche . . . . . . . . . .
1.3.4 I problemi dell’approccio FEM mesh . . . . . . . . . . . .
.
.
.
.
.
.
.
7
7
8
9
10
14
18
22
2 Il Metodo delle Celle
2.1 Le variabili fisiche . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1.1 Costanti e variabili . . . . . . . . . . . . . . . . . . . . . . . .
2.1.2 Classificazione in base alle entità geometriche di riferimento
2.1.3 La classificazione delle variabili in base al ruolo . . . . . . .
2.2 L’orientazione degli elementi spaziali . . . . . . . . . . . . . . . . .
2.2.1 Orientazione interna degli elementi spaziali . . . . . . . . .
2.2.2 Orientazione esterna degli elementi spaziali . . . . . . . . .
2.3 L’orientazione degli elementi temporali . . . . . . . . . . . . . . . .
2.3.1 Orientazione interna . . . . . . . . . . . . . . . . . . . . . . .
2.3.2 Orientazione esterna . . . . . . . . . . . . . . . . . . . . . . .
2.4 Attribuzione delle variabili agli elementi geometrici . . . . . . . . .
2.5 I complessi di celle . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.6 Impostazione del problema con il Metodo delle Celle . . . . . . . .
2.6.1 Equazioni di struttura . . . . . . . . . . . . . . . . . . . . . .
2.6.2 Equazioni costitutive . . . . . . . . . . . . . . . . . . . . . . .
2.6.3 I diagrammi di Tonti . . . . . . . . . . . . . . . . . . . . . . .
25
26
26
27
28
30
30
30
33
33
33
35
36
39
39
41
42
I
.
.
.
.
.
.
.
3 Formulazione quadratica con il Metodo delle Celle
3.1 Problemi scalari tridimensionali . . . . . . . . . . . . . . . . . .
3.1.1 Interpolazione quadratica . . . . . . . . . . . . . . . . .
3.1.2 Test di convergenza . . . . . . . . . . . . . . . . . . . .
3.2 Problemi di elasticità lineare tridimensionali . . . . . . . . . .
3.2.1 Interpolazione quadratica del campo degli spostamenti
3.2.2 Spostamenti - deformazioni . . . . . . . . . . . . . . . .
3.2.3 Legame sforzi - deformazioni . . . . . . . . . . . . . . .
3.2.4 Legame forze - sforzi . . . . . . . . . . . . . . . . . . . .
3.2.5 L’equazione fondamentale: il bilancio delle forze . . .
3.2.6 Test numerico . . . . . . . . . . . . . . . . . . . . . . . .
4 L’approccio meshless con il Metodo delle Celle
4.1 La filosofia dei metodi meshless . . . . . . . . . . . . . . . . .
4.1.1 Utilizzo di approcci meshless in ambito biomeccanico
4.2 Meshless a celle locali con il CM . . . . . . . . . . . . . . . .
4.2.1 Conduzione termica in regime stazionario . . . . . .
4.2.2 Sistemi elastici piani in regime di piccoli spostamenti
4.3 Interpolazione locale con funzioni polinomiali . . . . . . . .
4.3.1 Campo scalare stazionario . . . . . . . . . . . . . . . .
4.3.2 Sistemi piani deformabili . . . . . . . . . . . . . . . .
4.4 Interpolazione locale con funzioni di base radiale . . . . . .
4.4.1 Interpolazione RBF di campi scalari . . . . . . . . . .
4.4.2 Interpolazione RBF di campi vettoriali . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
47
48
48
56
58
59
61
64
65
66
68
.
.
.
.
.
.
.
.
.
.
.
73
73
77
79
83
88
93
96
106
111
116
123
5 Applicazione esplorativa della formulazione Meshless a celle locali con
il Metodo delle Celle
131
5.1 La selezione delle metodologia meshless applicata . . . . . . . . . . 133
5.2 Il test esplorativo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
5.2.1 L’esperimento di riferimento . . . . . . . . . . . . . . . . . . 138
5.2.2 Il dataset CT . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141
5.2.3 Il modello FEM subject specific . . . . . . . . . . . . . . . . . 141
5.2.4 Il modello MCM . . . . . . . . . . . . . . . . . . . . . . . . . 143
5.2.5 La definizione delle proprietà materiali . . . . . . . . . . . . 144
5.2.6 Determinazione dell’accuratezza dei modelli numerici . . . 144
5.3 Risultati . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146
6 Validazione della formulazione Meshless a celle locali con il Metodo
delle Celle
149
6.1 L’esperimento di riferimento . . . . . . . . . . . . . . . . . . . . . . 150
6.1.1 Le misure sperimentali . . . . . . . . . . . . . . . . . . . . . . 151
II
6.1.2
6.1.3
6.2
6.3
6.4
I modelli FEM . . . . . . . . . . . . . . . . . . . . . . . . . . .
Acquisizione CT, registrazione spaziale e proprietà meccaniche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.1.4 I modelli MCM . . . . . . . . . . . . . . . . . . . . . . . . . .
6.1.5 Definizione dell’accuratezza . . . . . . . . . . . . . . . . . .
Le criticità emerse . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2.1 Attribuzione delle proprietà meccaniche nell’MCM . . . . .
6.2.2 L’individuazione dei valori puntuali di deformazione . . . .
Validazione con le misure sperimentali . . . . . . . . . . . . . . . . .
Comparazione sistematica con modello FEM di riferimento . . . . .
153
153
155
155
156
156
160
161
165
Conclusioni
173
Bibliografia
179
III
IV
Introduzione
La predizione del rischio di frattura nei tessuti ossei è un tema dalle molteplici
ricadute nella pratica clinica sia nell’ambito dei processi di diagnosi che in quelli
di prognosi e di definizione di terapie. L’accurata predizione del rischio di frattura può infatti risultare importante nel trattamento dei pazienti osteoporotici,
nella pianificazione e nella gestione delle ricostruzioni scheletriche in oncologia
pediatrica così come nella pianificazione preoperatoria degli interventi di chirurgia protesica articolare.
La stima del rischio di frattura avviene oggi valutando, con metodologie radiografiche bidimensionali, il contenuto minerale dell’osso in specifici siti anatomici
ritenuti significativi; il rischio di frattura è ottenuto tramite inferenze statistiche
rispetto al contenuto minerale, ottenendo predizioni il cui grado di attendibilità
è dell’ordine del 70%. La frattura è però un evento che si sviluppa nell’osso a
livello di organo e in dipendenza di fattori sia interni (quantità di osso, sua distribuzione e struttura spaziale) che esterni (i carichi). In considerazione di ciò risulta
ragionevole pensare che un miglioramento delle predizioni del rischio di frattura
possa provenire dall’uso di modelli numerici tridimensionali: modelli subject–
specific costruiti sulle immagini medicali sono infatti di principio in grado di
contemplare in maniera più completa i fattori determinanti il comportamento
meccanico di ogni singolo segmento osseo studiato. Requisiti fondamentali di
una metodologia di indagine numerica nella specifica prospettiva delle applicazioni cliniche sono, oltre all’accuratezza, la robustezza nei confronti degli artefatti
nelle immagini diagnostiche, la generalità rispetto al sito di indagine e l’automaticità del processo.
Il Metodo degli Elementi Finiti (FEM) è a tutt’oggi uno dei metodi numerici
più affermati per l’indagine e la caratterizzazione del comportamento di un sistema fisico sotto determinate e controllate ipotesi. Questo è vieppiù vero nello
specifico ambito della biomeccanica ortopedica, in virtù della sua attitudine a replicare accuratamente sia la morfologia che le proprietà materiali di un segmento
osseo partendo dai dati di una Computed Tomography (CT). Gli studi svolti nel
1
corso degli negli ultimi vent’anni hanno portato allo sviluppo di una metodologia di modellazione basata sul FEM che, partendo da immagini medicali, si è
dimostrata in grado di ottenere precisioni compatibili con le applicazioni cliniche
nella replicazione di misure sperimentali di deformazioni su segmenti ossei in
vitro. La metodologia affinata si basa sulla precisa rappresentazione topologica
della superficie dell’osso, fatto che implica un processo complesso composto da
più fasi: l’individuazione della morfologia del segmento osseo mediante la definizione dei suoi contorni in ciascuna delle immagini del dataset CT (operazione,
denominata “segmentazione”, ad oggi ancora al più semi–automatica), la generazione di una descrizione matematica della superficie di contorno dell’osso, la
generazione della mesh (attualmente condotta con un software automatico), e la
mappatura delle proprietà meccaniche all’interno della mesh. Benché notevolmente progredito negli ultimi anni, questo processo accusa ancora un importante
limite rappresentato dalla complessità procedurale: la generazione di un modello completo a a partire dai dati delle immagini diagnostiche richiede un notevole
impegno sia in termini di tempo richiesto (tipicamente alcuni giorni) che di competenze specialistiche continuativamente dedicate ad ogni singolo studio. Questo
rende praticamente impossibile un’applicazione su vasta scala con tempi compatibili con quelli delle esigenze cliniche.
Nella letteratura di settore sono stati negli ultimi anni esplorati, seppur a livello
coacervale, approcci alternativi nell’intento di superare i limiti costituiti da questa onerosità di modellizzazione. La presente tesi formula e analizza appunto
alcune nuove ipotesi metodologiche per la costruzione di modelli numerici basati sulle immagini diagnostiche in grado superare i maggiori limiti della procedura
basata sul FEM; l’intento è quello di individuare, valutandone l’appicabilità, un
processo di analisi maggiormente automatico, di accuratezza compatibile con le
esigenze cliniche e completabile in tempi accettabili.
Il lavoro qui esposto si colloca nel contesto dell’attività di ricerca del Laboratorio di Tecnologia Medica dell’Istituto Ortopedico Rizzoli di Bologna, struttura
che ha finanziato il Dottorato e presso cui lo studio è stato condotto. Parte consistente dell’attività del Laboratorio è focalizzata sulla caratterizzazione dei tessuti
ossei a varia scala, e sull’affinamento di procedure validate di simulazione numerica per lo studio del comportamento meccanico dei segmenti ossei, nella prospettiva del loro trasferimento alla pratica clinica ortopedica. Oggetto della ricerca è
stato dunque, nello specifico, l’indagine attorno a metodi numerici innovativi alternativi al FEM relativamente agli specifici problemi di meccanica dell’osso. Il
focus applicativo è uno degli elementi caratterizzanti il lavoro, guidando sia la
scelta delle alternative studiate che il processo di valutazione dell’applicabilità e
di accertamento dell’accuratezza.
2
L’elaborato esplora alcune ipotesi fondate su implementazioni numeriche innovative derivate del Metodo delle Celle. Il Metodo delle Celle (CM) è un metodo
numerico basato sulla formulazione discreta diretta delle equazioni di campo. Il
CM scrive le equazioni di campo direttamente nella loro forma algebrica, facendo
uso di variabili globali riferite agli elementi (spaziali e temporali) di due complessi di celle tra i quali sussiste una dualità topologica. Malgrado sia di ideazione
relativamente recente, il CM ha conosciuto negli ultimi anni un grande sviluppo,
venendo applicato in differenti discipline tecnico–scientifiche quali l’elastostatica,
l’elastodinamica, lo studio della trasmissione del calore, i problemi di elettromagnetismo e la dinamica dei fluidi.
I pregi del Metodo risiedono soprattutto nella semplicità concettuale e nella sua
aderenza ella realtà fisica e sperimentale; la facilità di implementazione e alcuni
significativi vantaggi di tipo computazionale rilevati in alcune specifiche applicazioni rendono fondato il considerare il CM una valida alternativa ad altri metodi
numerici oggi comunemente utilizzati e nei confronti dei quali ha dimostrato di
essere pari (e talvolta superiore) relativamente a precisione numerica ed ordine
di convergenza.
Il Metodo delle Celle è in grado di affrontare sistemi caratterizzati da geometrie complesse e da eterogeneità nelle proprietà materiali: la formulazione finita,
che costituisce il cuore del Metodo, non trova infatti ostacoli nell’affrontare sistemi in cui ogni cella abbia proprietà differenti da quelle adiacenti; l’approccio
discreto non produce singolarità formali nell’applicazione di sorgenti concentrate, né sussistono condizionamenti nella forma del dominio analizzabile o vincoli
nella discretizzazione. Esso si candida dunque ad essere un metodo potenzialmente utile per lo studio di sistemi biomeccanici, tipicamente caratterizzati da
geometrie complesse e irregolari e da una grande variabilità distribuzione delle
proprietà materiali.
L’esplorazione di alternative al FEM è stata focalizzata sul Metodo delle Celle per
due ragioni: in primo luogo il CM, rifiutando a priori l’ipotesi di continuo e assumendo filosoficamente la prospettiva dell’approccio discreto, appare nei principi
concorde con la struttura della fonte di informazione (i dataset di immagini diagnostiche) con cui i modelli possono venire definiti; in secondo luogo il CM ha
manifestato di poter rendere accessibili alcuni strumenti (quali la formulazione
quadratica con ordine di convergenza nativamente pari a 4 e un approccio meshless di semplice formulazione) tali da costituire a priori motivo di interesse e
ragione di studio in un ottica non già solamente accademica quanto piuttosto pratica e applicativa.
Dal punto di vista concettuale la tesi è strutturata in tre parti: la prima parte inquadra il problema di riferimento e presenta il metodo numerico oggetto
3
di studio; la seconda parte è focalizzata sullo sviluppo formale di alcune implementazioni innovative; la terza parte ha infine carattere applicativo, indagando
applicabilità e accuratezza di una delle ipotesi formulate.
Il capitolo 1 presenta il tema della definizione dei modelli numerici subject
specific di segmenti ossei costruiti su dati di immagini diagnostiche; vengono
descritti gli strumenti disponibili e le metodologie ad oggi più affidabili, analizzando le limitazioni e le incertezze connaturate sia ai metodi di manipolazione
che alla fonte di informazione.
Nel capitolo 2 viene presentato il Metodo delle Celle, conferendo particolare
rilievo all’architettura logica e formale su cui si fonda: la filosofia della formulazione finita, cuore del Metodo delle Celle, è sinteticamente esposta con alcune
digressioni di carattere tassonomico sulle possibili classificazioni delle variabili
fisiche, sull’orientazione degli elementi geometrici e temporali e sui complessi di
celle.
Nel capitolo 3 viene presentata l’estensione della formulazione quadratica del
Metodo delle Celle ai problemi tridimensionali: la descrizione dell’impostazione
formale e implementativa relativamente ai problemi di riferimento (trasmissione
del calore in regime stazionario ed elasticità lineare) è completata da alcuni test
su casi di riferimento in cui la soluzione numerica viene confrontata con quella
teorica disponibile in forma chiusa.
Nel capitolo 4 vengono esplorate alcune ipotesi di approccio meshless del
CM: una breve disamina di metodi meshless in ambito differenziale viene completata da una digressione sulle applicazioni nello specifico ambito della biomeccanica. I caratteri generali di un approccio meshless, reso accessibile in modo
diretto dalla struttura concettuale del CM, vengono poi declinati nello specifico
di tre approcci proposti: il primo basato sulla creazione di un complesso locale
di celle primali, gli altri due basati su un’interpolazione della funzione incognita
definita localmente su una costellazione di punti a connettività non definita. Presentata la formulazione teorica e alcune considerazioni sugli aspetti implementativi, gli approcci proposti vengono applicati a problemi di test di riferimento sia
relativamente alla soluzione nuemrica dell’equazione di Laplace che alla soluzione di problemi di elasticità lineare nel caso, assunto come riferimento, della Trave
di Timoshenko.
Nel capitolo 5 viene presentato lo studio di applicabilità di uno degli approcci
proposti: il metodo selezionato è quello basato sulla definizione di un complesso locale di celle primali e viene denominato Meshless Cell Method (MCM). La
4
verifica di applicabilità avviene replicando con il modello MCM una prova sperimentale di carico su un campione di femore in vitro, problema usato come riferimento per la sua valenza rispetto alla prospettiva di applicazione in ambito
clinico. La valutazione viene condotta comparando le misure sperimentali di deformazione con i valori predetti dal modello numerico nei punti corrispondenti
ai siti di misura sperimentale. Le predizioni di un modello FEM replicante la stessa condizione sperimentale, fornisce anche elementi di valutazione comparativa
rispetto al gold standard numerico di riferimento.
Il capitolo 6 è infine dedicato alla validazione della formulazione MCM la cui
applicabilità è stata verificata nel capitolo precedente. Come riferimento viene
adottata una campagna di misure sperimentali condotte su 8 differenti campioni di femore in 6 distinte configurazioni di carico; le misure sperimentali di deformazione in 15 differenti siti anatomici costituiscono l’elemento di verifica di
precisione nell’identificazione della realtà sperimentale. Definita una metrica di
accuratezza globale del modello, le prestazioni registrate dalle analisi MCM sono valutate anche per comparazione con i corrispondenti parametri ottenuti con i
modelli FEM replicanti i medesimi esperimenti. Il confronto puntuale e sistematico con i valori di deformazione principale negli elementi di uno dei modelli FEM
offrono infine uno strumento di comprensione del comportamento del modello
MCM rispetto a quello del metodo numerico validato di riferimento.
5
6
Capitolo 1
La creazione di modelli numerici
subject–specific di segmenti ossei
La conoscenza delle tensioni che si producono all’interno di un segmento osseo
può risultare di grandissima importanza per una molteplicità di applicazioni sia
di carattere clinico che nell’ambito della ricerca. La progettazione di una protesi,
ad esempio, non può certo prescindere dalla conoscenza delle sollecitazioni a cui
sarà sottoposta; così come pure la previsione gli stress sopportabili da un arto
ricostruito è importante ai fini di un’appropriata programmazione dell’attività di
riabilitazione, potendo controllare i rischi di frattura rispetto alle sollecitazioni
attese. La predizione del rischio di frattura assume poi rilievo in ambito clinico
quale strumento diagnostico, di prognosi e di cura.
1.1 Scopi e ragioni dell’analisi
La misura delle sollecitazioni meccaniche in vivo (ovvero su pazienti in vita) non
è fattibile senza evitare invasivi interventi chirurgici, operazione che è peraltro
comunemente ritenuta eticamente inaccettabile. Il solo modo per poter fare una
previsione non invasiva degli stress meccanici in vivo è la costruzione di un modello numerico. L’estrema variabilità sia in termini di morfologia che di peculiare distribuzione spaziale delle prorpietà fisiche e meccaniche dei segmenti ossei, impongono, nella prospettiva delle applicazioni cliniche, la manipolazione di
modelli specificamente costruiti sul singolo caso da studiare: tali modelli sono
solitamente detti modelli subject specific.
L’individuazione di un metodo per poter simulare con attendibilità le sollecitazioni prodotte comporta poi ovviamente tutti i vantaggi già noti per ogni settore
ingegneristico: ridurre notevolmente le onerose, complesse e delicate (oltre che
7
1 – La creazione di modelli numerici subject–specific di segmenti ossei
in genere costose) prove sperimentali e poter studiare gli effetti di differenti condizioni di carico su un medesimo sistema.
La costruzione di un modello “subject specific” è possibile partendo dalle informazioni disponibili dalle immagini di una tomografia computerizzata (CT), tecnica di diagnostica per immagini che allo stato attuale costituisce la migliore e più
attendibile fonte di informazioni circa la morfologia e le proprietà meccaniche dei
segmenti scheletrici di un soggetto in vita.
I dati ottenuti con un’acquisizione CT consentono di ottenere una rappresentazione geometrica e, in prima approssimazione, delle proprietà meccaniche di
un osso, cui è pensabile l’applicazione di un qualche metodo numerico per l’analisi delle sollecitazioni, fissati opportunamente carichi e condizioni di vincolo.
Questa operazione è comunque tutt’altro che semplice: innanzitutto per le difficoltà che si incontrano nella costruzione di un modello geometrico; in secondo
luogo per la complicata caratterizzazione del comportamento meccanico del materiale e quindi, in ultima analisi, per le difficoltà nell’individuare un modello di
comportamento attendibile.
Molte sono le strade possibili e molti sono i metodi ad oggi sperimentati; l’indagine sulla validità di un metodo si basa evidentemente sul confronto con i dati
sperimentali ottenuti in laboratorio su campioni espiantati.
1.2 Criteri di applicabilità
In linea di principio l’analisi numerica delle sollecitazioni meccaniche in una
struttura ossea è possibile con un qualsiasi metodo di calcolo. Affinché un metodo di analisi numerica possa essere utilizzabile per studi clinici, esso deve però
soddisfare dei requisiti di base e dovendo risultare:
• Automatico (Automation), per ridurre il tempo di analisi: il numero delle prove da effettuare à in genere elevato e le applicazioni diagnostiche
richiedono risposte in breve tempo;
• Generale (Generality), per poter rappresentare correttamente ogni segmento
osseo: le ossa dello scheletro umano presentano infatti una grande varietà
di forma, dimensioni e proprietà fisiche;
• Accurato (Accuracy) perché i risultati della analisi possano poter essere utilizzati in fase di diagnosi o di definizione di terapie.
• Robusto (Robustness) per riuscire a produrre un modello accurato anche da
dati incompleti o affetti da rumore.
8
1.3 – La definizione di un modello
Per meglio precisare questi concetti:
Automaticità = attitudine a completare il processo di analisi con il minor numero
possibile di interventi;
Generalità = attitudine a completare il processo di analisi per qualunque segmento di osso a prescindere dall’eventuale presenza di anomalie anatomiche fisiologiche o patologiche.
Robustezza = attitudine a condurre analisi anche partendo da dati incompleti
affetti da rumore.
L’accuratezza di in un metodo può essere valutata in vitro, ma allo stato attuale
è difficilmente accertabile in vivo. Di fatto esiste la possibilità di misure in vivo
di micro-motion per mezzo della Rontgen Stereophotogrammetric Analysis; è questa
tecnica è stata usata principalmente per la valutazione di impianti micro-motion,
ma la sua accuratezza è ritenuta discutibile ed si è ancora nella fase di standardizzazione del metodo.
Il metodo di calcolo attualmente più affermato è senza dubbio il Metodo degli Elementi Finiti (FEM), già ampiamente utilizzato in ambito biomedico per lo
studio di problemi di campo termico, magnetico, elettrico e per l’analisi della
diffusione delle radiazioni nei tessuti corporei. Un’altra applicazione è quella riguardante problemi strutturali per stabilire le deformazioni e gli stati di tensione
indotti da azioni esterne sugli organi del corpo umano, ivi compreso, pertanto,
l’ambito ortopedico.
Il FEM si è affermato rispetto ai metodi concorrenti (Boundary Elements Method, Finite Volume Method, ...) per la sua attitudine a studiare sistemi di elevata complessità geometrica e meccanicamente non omogenei, eventualmente
caratterizzate da un comportamento non lineare.
1.3 La definizione di un modello
In letteratura vengono riportate molte metodologie per la definizione di modelli
ad elementi finiti “subject specific” caratterizzate da diversi livelli di automazione: partendo dai dati CT, esse permettono la definizione di modelli che riproducono le peculiari caratteristiche morfologiche del segmento osseo studiato, e che
riportano la specifica distribuzione delle proprietà meccaniche dei tessuti presenti. Non tutte queste metodologie (alcune delle quali già usate con successo in
vari contesti) sembrano però rispondere a tutti i requisiti di automazione, di generalità, di esattezza e robustezza richiesti, particolarmente, da un’applicazione
9
1 – La creazione di modelli numerici subject–specific di segmenti ossei
clinica.
Qualunque strada si adotti, la costruzione di un modello “subject secific” deve
comunque affrontare due fasi fondamentali:
1. la generazione della mesh;
2. la definizione delle proprietà dei materiali.
Entrambe queste fasi si basano sull’interpretazione e la manipolazione delle informazioni rese disponibili dalle immagini CT.
1.3.1 La Tomografia Computerizzata (CT)
La Tomografia Computerizzata (o CT, Computed Tomography) è una metodologia generale che permette di ottenere immagini tomografiche ovvero di sezioni
trasversali di un oggetto. Questo è possibile con una tecnica nota come retroproiezione, con la quale, tramite un computer, si riesce a ricostruire l’immagine di
una sezione sulla base dei proiezioni fatte da angoli diversi. Solitamente l’espressione Tomografia Computerizzata fa riferimento a immagini costruite su proiezioni
prodotte dalla misura dalla trasmissione dei raggi di X (X-ray Computed Tomography). Tuttavia, il termine potrebbe anche includere le immagini ottenute con la
SPECT (Single Photon Emission Computed Tomography) o con la PET (Positron
Emission Tomography) e perfino alcune tecniche ad ultrasuoni basate su misure
di proiezione.
Le immagini CT sono tipicamente degli array bidimensionali di 512*512 pixel.
Ogni pixel (picture element, elemento bidimensionale di base di un’immagine digitale) riporta un valore scalare che individua uno dei 4096 possibili gradi di grigio
definibili con una codifica a 12 bit. Siccome le immagini (slices) sono tra loro separate, ad ogni immagine è associato uno spessore (thickness) dell’oggetto scandito
e dunque ad ogni pixel è associato un voxel (volume element).
Il vantaggio principale di una CT rispetto alle proiezioni semplici è la capacità
di separare gli oggetti disposti nel senso della proiezione, evitando la confusione che si crea quando le ombre di più oggetti si sovrappongono. Questo fatto,
unitamente all’alta precisione delle misure e alla produzione di immagini digitali, dà alla CT la capacità di cogliere oggetti con contrasto estremamente piccolo.
Per esempio, i sistemi CT che usano dei raggi X sono in grado di distinguere facilmente oggetti per i quali la differenza relativa nel coefficiente di attenuazione
è una frazione di per cento. Questo permette rappresentazioni altrimenti non
ottenibili con le tradizionali proiezioni radiografiche.
10
1.3 – La definizione di un modello
Figura 1.1. Immagine CT: pixel e voxel.
1.3.1.1 La ricostruzione dell’immagine
La ricostruzione dell’immagine è quel processo con cui, partendo dai dati grezzi
per ciascuna delle giaciture di proiezione utilizzate, si ricostruisce la distribuzione spaziale dell’assorbimento subito dalla radiazione incidente nell’area spazzata
dai raggi di proiezione.
Esiste una precisa relazione matematica tra la distribuzione spaziale delle proprietà fisiche in un mezzo (quali la densità, l’impedenza acustica, la magnetizzazione) e le misure di attenuazione di un segnale acustico o elettromagnetico. Il
processo di ricostruzione è il percorso inverso, attraverso il quale dalle misure di
attenuazione si ottiene la distribuzione spaziale delle proprietà fisiche del mezzo.
Nel caso in cui si usino i raggi X, un fascio collimato passa attraverso l’oggetto in
esame ed esce, dalla parte opposta, attenuato a causa dell’assorbimento apportato dai tessuti presenti.
Rilevatori registrano i segnali in uscita e li convertono in proiezioni lineari (secondo una direttrice ortogonale alla direzione del fascio) della distribuzione del
coefficiente di attenuazione lineare della sezione. Noto l’insieme di profili di attenuazione lineari, utilizzando opportuni algoritmi, si riesce a risalire al profilo
di attenuazione spaziale sulla sezione “spazzata” dal fascio (detta slice). In una
11
1 – La creazione di modelli numerici subject–specific di segmenti ossei
Figura 1.2. Schema di funzionamento di uno scanner TC.
situazione ideale l’intensità di un raggio che attraversa una regione a densità costante si attenua in modo esponenziale lungo il suo percorso. Il logaritmo del
rapporto fra intensità incidente e intensità trasmessa corrisponde all’integrale di
linea del coefficiente di attenuazione lineare lungo il percorso all’interno del mezzo. In un sistema CT ideale la ricostruzione dell’immagine è ottenibile con una
semplice procedura di ricostruzione della proiezione basata su un algoritmo di
convoluzione dei segnali di assorbimento misurati.
Di fatto nei sistemi CT reali sono presenti una serie di imperfezioni che devono
essere corrette per minimizzare gli artefatti nella ricostruzione delle immagini:
correzioni di offset e di guadagno per eliminare gli errori tra i sensori; procedure di correzione dell’indurimento del fascio1 per minimizzare gli effetti dovuti
alla dispersione dello spettro di energia del fascio di raggi X; altre tecniche di
compensazione permettono di eliminare artefatti dovuti alla specifica geometria
dello scanner.
Nell’immagine ricostruita le differenze di contrasto sono dovute alle differenze del coefficiente di attenuazione lineare nei tessuti attraversati dai raggi X.
1
artefatto che si produce quando è presente una brusca variazione nella densità del mezzo,
caso tipico di quando nell’osso è presente un materiale metallico quale un chiodo o una protesi
12
1.3 – La definizione di un modello
Figura 1.3. Immagine CT di una sezione di cranio: i differenti livelli di grigio
corrispondono a differenti valori del coefficiente di attenuazione lineare del fascio
di raggi X, ossia a diversi valori di densità dei tessuti attraversati).
L’immagine prodotta è quindi la rappresentazione della distribuzione spaziale
dei coefficienti di attenuazione lineare. Per i tessuti molli il coefficiente di attenuazione lineare è in prima approssimazione proporzionale alla densità: pertanto i valori riportati in un’immagine CT sono espressi talvolta anche in termini di
densità.
Le immagini CT costituiscono attualmente la migliore fonte di informazione per
la costruzione di un modello subject specific di un segmento osseo: questo perché
il coefficiente di assorbimento del tessuto osseo molto più elevato di quello dei
tessuti circostanti, fatto che produce elevati contrasti dell’immagine e permette
dunque una più agevole delimitazione del contorno.
1.3.1.2 Le Hounfield Units (o CT numbers)
Dopo l’operazione di ricostruzione, l’immagine CT è costituita da un set di numeri floating point, utili per effettuare confronti ma non per la loro rappresentazione.
Siccome la maggior parte dei sistemi di visualizzazione grafica lavora con valori
interi, dopo la fase di ricostruzione, ma prima della visualizzazione, i dati delle
immagini CT vengono normalizzati e approssimati a valori interi.
Con questa operazione i valori floating point µ( x,y) corrispondenti al valore del
13
1 – La creazione di modelli numerici subject–specific di segmenti ossei
coefficiente di assorbimento lineare nel pixel di coordinata (x,y) sono trasformati
in valori interi utilizzando un’operazione di normalizzazione quale:
CT (x,y) = 1000 ·
µ(x,y) − µH2 0
µH 2 0
(1.1)
dove µH2 0 è il valore del coefficiente di attenuazione dell’acqua. I valori CT (x,y)
sono noti come Hounsfield Unit2 (HU), e rappresentano i valori in uscita di tutto
il processo di elaborazione dei segnali registrati.
1.3.2 La costruzione della mesh dai dati CT
La discretizzazione della struttura ossea individuata dai dati CT, con la creazione di una mesh tridimensionale, è una fase molto molto onerosa, in termini di
tempo, nella definizione di un modello ad elementi finiti; peraltro è anche una
fase molto delicata, poiché la qualità della mesh influenza la qualità dei risultati,
e per poter ottenere una buona accuratezza dei risultati, la mesh deve soddisfare
condizioni molto restrittive.
L’adozione di un sistema automatico per la generazione della mesh è una scelta
obbligata per rendere un processo di analisi compatibile con i tempi della pratica clinica ovvero quando si voglia condurre un’analisi su un elevato numero di
campioni: è del tutto evidente che una procedura manuale comporterebbe grandi
sforzi e risulterebbe eccessivamente onerosa in termini di tempo.
Un generatore automatico di mesh (AMG, automatic mesh generator) può essere
definito [1] come “un algoritmo automatico che può creare una mesh valida per
una geometria di complessità arbitraria, con il solo controllo di parametri di programma e senza l’intervento manuale dell’utente”.
Ogni AMG può essere classificato in relazione al tipo di connettività della mesh
(strutturata o non strutturata [2]) e in relazione al tipo di elemento utilizzato per
la discretizzazione (nella maggior parte dei casi tetraedri o esaedri). Pur essendo un tema ancora aperto, sono oggi disponibili per mote applicazioni algoritmi
assai robusti per la generazione di mesh, e quasi tutti i codici FEM commerciali permettono di generare mesh di tetraedri. In particolari contesti applicativi,
quale per l’appunto quello biomedico, esigenze e problemi specifici limitano di
fatto l’applicabilità degli strumenti disponibili per la discretizzazione automatica.
Nella specificità della rappresentazione di un segmento osseo, i maggiori ostacoli
sono costituiti dalla complessità geometrica e dalla scarsa definizione con cui è
descritta la superficie di contorno della struttura ossea.
La CT, oggi la fonte di informazioni più accurata per la rappresentazione di una
2
Hounsfield fu l’ingegnere britannico che mise a punto la tecnologia della TAC, operazione
che gli valse il premio nobel per la medicina di cui fu insignito nell’anno 1979
14
1.3 – La definizione di un modello
struttura ossea, produce una pila di immagini che raffigurano sezioni trasversali
del segmento studiato. Noto il riferimento geometrico che permette di collocare
le immagini nello spazio, la pila di immagini riporta i valori di un campo scalare
nei punti di una griglia spaziale regolare: il campo scalare è quello dei coefficienti
di attenuazione, definiti indipendentemente dai confini di separazione fra tessuti
di organi differenti. La soluzione agli elementi finiti delle equazioni differenziali che descrivono un problema, richiede però che il dominio di integrazione sia
chiuso e ben definito.
In questa struttura di dati (denominata dataset), la distinzione fra i tessuti non è
determinabile a priori e dunque la definizione della geometria del segmento osseo, essenziale ai fini di una generazione automatica di una mesh, non può essere
immediata.
Allo stato attuale sono state definite due strategie fondamentali per l’individuazione della geometria e, dunque, per poter provvedere alla generazione automatica della mesh di un segmento osseo:
1. una procedura di sogliatura generalizzata con cui si individuano i punti che
potrebbero appartenere al tessuto osseo;
2. la definizione di una superficie di confine tra tessuto osseo e tessuti circostanti attraverso un processo denominato “segmentazione”.
1.3.2.1 Il processo di sogliatura automatica: l’approccio voxel mesh
Si tratta di una procedura completamente automatizzata che permette direttamente la creazione di una mesh cartesiana appoggiata sulla struttura del data
set CT. La disposizione regolare di punti in cui sono noti i valori di assorbimento della radiazione offre una naturale discretizzazione basata sui parallelepipedi
costituiti dai voxel. Esistono dei sofisticati algoritmi basati sul valore locale del
gradiente del campo scalare (di assorbimento della radiazione e dunque, come
si è visto, di densità) per individuare gli elementi superficiali o per realizzare
raffittimenti localizzati nelle zone di transizione fra tessuti differenti.
1.3.2.2 L’individuazione della superficie di contorno: la segmentazione
Un metodo alternativo comporta invece l’individuazione di una superficie di contorno: l’operazione con cui in un’immagine diagnostica si individua la superficie
di contorno di un organo è in genere denominata segmentazione. Per realizzare
questa operazione esistono dei codici commerciali che fanno uso di vari algoritmi più o meno automatizzati. In termini generali le tecniche di segmentazione
possono essere classificate in quattro categorie fondamentali:
15
1 – La creazione di modelli numerici subject–specific di segmenti ossei
• le nuvole di punti: il contorno è definito da un insieme di punti nello spazio; questa categoria è di fatto poco usata per le poche garanzie di continuità della superficie di contorno; teoricamente esisterebbero dei metodi (tipici
dei programmi CAD) per approssimare la nuvola di punti con superfici matematicamente definite, ma di fatto, forse per causa della dispersione di precisione nel posizionamento dei punti, non si è a conoscenza di applicazioni
in ambito biomeccanico.
• le pile di contorni: una seconda categoria di algoritmi elabora separatamente ogni singola immagine della pila prodotta dalla CT; per ogni immagine viene utilizzato un algoritmo di segmentazione (quale il conjugategradient follower [3]), e il contorno viene così definito da una serie di curve
piane. Tutti i metodi convenzionali basati su “derivative methods”, sono
però al più semi–automatici: anche nel caso della segmentazione di un osso, facilitato da immagini fortemente contrastate, un intervento manuale si
rende in genere necessario nelle regioni epifisarie [4]. Segmentate tutte le
Figura 1.4. Segmentazione delle immagini e produzione dei contorni per ciascuna delle immagini del data-set CT
immagini, l’insieme dei singoli contorni può essere interpolato per ottenere
una superficie chiusa: questa operazione è sempre fattibile adottando come
superficie un insieme di simplessi [5], ma se si vuole fare uso di superfici
matematicamente descritte da polinomi di ordine superiore si deve in genere provvedere alla correzione manuale dei coefficienti del polinomio per
ogni singolo contorno.
16
1.3 – La definizione di un modello
• la superfici tassellizzate tridimensionali: un terzo approccio permette di
elaborare direttamente in maniera automatica l’intera pila di immagini considerata quale dataset tridimensionale. Questo metodo, il cui antenato è
il Marching Cube [6], consente l’estrazione automatica di superfici di isodensità dal dataset CT: la superficie è rappresentata da simplessi poligonali (tipicamente triangoli) che costituiscono una superficie denominata tassellizzata. Il difetto di questo metodo è che produce spesso superfici con
contraddizioni topologiche quali ad esempio triangoli mancanti o sovrapposti; inoltre si viene a generare solitamente un numero molto elevato di
simplessi, che, nel caso di un femore umano, può tranquillamente arrivare
all’ordine delle migliaia di elementi.
• le superfici matematiche tridimensionali: l’ultimo gruppo di tecniche di
segmentazione fa uso di superfici matematiche “elasticamente deformabili”: la corrispondenza con il contorno dell’organo è ottenuta attraverso la
minimizzazione di un’opportuna funzione di costo definita sul campo scalare del dataset CT. Di fatto questo approccio è ancora in fase di sviluppo
e a tutt’oggi non è pienamente utilizzabile; inoltre le implementazioni attuali richiedono la definizione empirica di una serie di parametri per ogni
singolo dataset, e si può pertanto affermare che l’algoritmo non sia ancora
automatico.
Agli effetti pratici attualmente la creazione della mesh parte dalla superficie di
confine del tessuto osseo in forma tassellizzata. Da questa base di partenza sono
ancora possibili due metodi alternativi:
• rappresentare la superficie tassellizzata con una serie di superfici matematicamente definite che nel loro complesso definiscano un solido topologicamente corretto. Questa superficie può allora essere discretizzata, e la mesh
ottenuta serve di appoggio per la creazione della mesh del volume. Per
descrivere la superficie tasselizzata si possono usare degli elementi di superficî NURBS (Non-Uniform Rational B-Splines) generabili con sofisticati
programmi di reverse engineering, e sulle quali la creazione di una mesh di
superficie risulta relativamente facile. Importate le NURBS in un programma FEM, si provvede dapprima alla creazione della mesh sulle NURBS che
funge da appoggio alla discretizzazione del volume con elementi tetraedrici.
• la superficie tassellizzata ottenuta con la segmentazione può essere utilizzata senza ulteriori elaborazioni. La metodologia, chiamata “grid-based”, effettua sostanzialmente una proiezione della griglia di punti del dataset sulla
superficie di contorno. L’assenza di codici commerciali che implementino
questa procedura ne ha di fatto determinato la scarsità di utilizzo.
17
1 – La creazione di modelli numerici subject–specific di segmenti ossei
1.3.3 Definizione delle proprietà meccaniche
Una volta completata la discretizzazione del segmento osseo, è necessario attribuire ad ogni elemento della mesh le relative proprietà meccaniche. Nel caso
di una modellizzazione generica di un osso, le proprietà meccaniche dei differenti tessuti ossei sono generalmente assunti pari ai valori medi riportati nella
letteratura delle misure sperimentali [4, 7]. Quando invece si cura un modello subject-specific le proprietà meccaniche devono essere derivate dai dati CT. È
stato dimostrato come la distribuzione delle tensioni in un osso sia fortemente
legata alla distribuzione delle proprietà meccaniche nel tessuto osseo. Pertanto è
di fondamentale importanza individuare un metodo valido per individuare dai
dati CT la distribuzione delle proprietà meccaniche in un tessuto osseo e poterla
mappare in un modello ad elementi finiti subject-specific.
In una CT a raggi X, le immagini rappresentano la distribuzione del coefficiente di attenuazione lineare dei tessuti; i valori riportati sono in genere espressi in
Hounsfield Units (HU), unità di misura ormai riconosciuta come standard. Questo sistema di unità presenta i coefficienti di attenuazione nella forma normalizzata definita dall’espressione (1.1), nella quale all’acqua viene assegnato il valore
0 e all’aria il valore −1000.
È stato dimostrato che esiste una correlazione quasi lineare fra le unità HU (CT
numbers) e i valori di densità apparente di un tessuto biologico, e che questo legame è valido per un ampio range di valori di densità [8, 9]. Il passaggio fra le
CT units e la densità di un tessuto biologico è chiamato calibrazione del dataset.
Inoltre sono state individuate sperimentalmente delle buone relazioni empiriche
tra densità e proprietà meccaniche dei tessuti ossei [10, 11, 12]. È quindi in linea di principio possibile derivare dai dati CT una distribuzione non omogenea
delle proprietà dei tessuti e tenerne quindi conto nel modello ad elementi finiti subject-specific. In letteratura sono proposti vari metodi per realizzare questa
operazione, caratterizzati da differenti livelli di automaticità e dipendenti dalla
tecnica che si è adottata per creare la mesh.
Nel caso così detto “voxel mesh” [13, 14] il compito è semplice: il data-set CT rappresenta un volume campionato nei punti di una griglia regolare e gli elementi
della mesh cartesiana, generata automaticamente con un criterio di sogliatura automatica, hanno forma di parallelepipedo e sono ottenuti dall’unione di un prefissato numero di voxels.
Il trasferimento dei dati CT agli elementi della mesh è dunque naturale potendosi associare direttamente ad ogni elemento il valore medio di densità radiologica
dei voxel che lo compongono; il passaggio al modulo di Young è poi possibile
utilizzando un’opportuna relazione empirica riportata in letteratura. Va sottolineato che, per la natura delle relazioni che legano valori CT alla densità e la
18
1.3 – La definizione di un modello
densità al modulo di Young, le due operazioni non sono commutative: pertanto una strada alternativa, e non equivalente, è quella di passare in ogni punto
del dataset dai valori CT ai valori del modulo di Young, associando poi ad ogni
elemento la media dei valori del modulo di Young ottenuti nei voxel componenti.
Avendo generato una mesh strutturata, è possibile realizzare un’accurata mappatura delle proprietà dei diversi tessuti dato che le facce degli elementi possono
seguire debitamente i confini fra i vari tessuti ossei. In questo caso la densità
media in un singolo elemento finito è definita sulla base dei voxel che cadono al
proprio interno. La procedura può avere diversi livelli di automazione, ma in
ogni si basa implicitamente sulla conoscenza a priori della topologia della mesh
[15, 13, 16].
Quando si sia invece costruita una mesh non strutturata, le facce degli elementi non sono allineate né con gli assi del dataset CT, né con le superfici del
tessuto osseo; poiché è improponibile procedere ad una mappatura manuale delle proprietà meccaniche sugli elementi della mesh, è necessario escogitare dei
metodi più sofisticati. Se la mesh è generata partendo dagli stessi dati, la mesh e
la distribuzione delle densità sono perfettamente registrate nello spazio. L’unico
problema è quello di stabilire come trasferire agli elementi del modello i valori di
questa non omogenea distribuzione delle proprietà. In letteratura vengono descritte due strategie.
Un primo approccio è quello di includere nella formulazione degli elementi le
proprietà meccaniche variabili nello spazio. Questo è l’approccio più generale
che bene si accorda con la sostanziale variabilità delle proprietà dei tessuti entro
ogni elemento di volume. Questo approccio non si può adottare utilizzando un
codice FEM commerciale “general purpose” richiedendo una formulazione “ad
hoc” e dunque una manipolazione del solutore. Inoltre l’esigenza di una tale
complessità di analisi non è stata sinora dimostrata ed ha forse costituito la ragione per cui questo approccio risulta essere stato sinora utilizzato in un solo studio
[17].
Tutti gli altri studi sono basati sull’implicita assunzione che le variazioni dei
valori CT all’interno del volume di ogni elemento siano trascurabili. Pertanto
le proprietà meccaniche del tessuto vengono assegnate agli elementi facendo la
media dei valori del campo scalare all’interno di ogni elemento. Le differenze
risiedono nel modo di calcolare questa media all’interno degli elementi.
L’approccio più semplice proposto in letteratura è la ricerca per ogni nodo di
ciascun elemento del valore associato al più vicino punto del dataset CT: all’elemento viene allora assegnata la media pesata dei valori nodali [18]. Una variante
proposta in letteratura assegna ad ogni elemento il valore ottenuto mediando le
19
1 – La creazione di modelli numerici subject–specific di segmenti ossei
densità degli otto punti della griglia CT che si trovano attorno al centroide dell’elemento [19]. Questi metodi sono di implementazione assai semplice, ma possono produrre dei risultati inaccurati quando la dimensione degli elementi sia
significativamente maggiore della spaziatura della grigia di punti CT.
Un secondo approccio, proposto inizialmente con limitazioni [20] e successivamente reso disponibile in una formulazione generalizzata nel codice open
source BONEMAT_V1 [21], assegna agli elementi la media dei valori associati
ai punti del dataset CT che cadono all’interno di ogni elemento. In questo caso
anche se la dimensione dell’elemento è significativamente maggiore della spaziatura della griglia CT, il risultato ottenuto è ragionevolmente accurato. Tuttavia,
neppure questo metodo può produrre risultati soddisfacenti quando la dimensione degli elementi sia, al contrario, pari o minore delle dimensioni dei voxel. Per
questa ragione sarebbe importante poter disporre di un codice in grado di trattare entrambe le situazioni e che, completamente automatizzato, potesse essere
utilizzato anche con mesh non strutturate. Un codice con queste caratteristiche,
chiamato BONEMAT_V23 è stato in effetti realizzato dai Laboratori di Tecnologia
Medica dell’Istituto Ortopedico Rizzoli di Bologna, ed è stato verificato per confronto con il BONEMAT_V1 in tre differenti tipi di osso.
1.3.3.1 Il software di mappatura
La struttura delle due versioni del codice BONEMAT è la stessa, e le differenze
risiedono nel modo in cui, partendo dai valori CT, viene calcolato il valore medio
HU assegnato a ciascun elemento della mesh. La sua struttura di base del codice4
può essere divisa in tre fasi fondamentali, di seguito illustrate.
Valutazione del valore medio di HU
Per ciascun elemento della mesh il codice calcola un valore uniforme HU sulla
base dei dati CT tramite la formula:
R
R
HU
(x,y,z)dV
HU (r,s,t)det[J(r,s,t)]dV
(1.2)
HU n = Vn R
= Vn
Vn
dV
Vn
dove Vn è il volume dell’elemento n, (x,y,z) sono le coordinate nel riferimento
CT, (r,s,t) sono le coordinate locali nel sistema di riferimento dell’elemento e J
è lo jacobiano della trasformazione tra i due sistemi di coordinate. Gli integrali
dell’equazione (1.2) vengono valutati numericamente, con la possibilità di poter
3
4
disponibile presso il sito http://www.biomedtown.org/B3C_Building/products/bonemat/
decritta analiticamente nella documentazione riportata nelle pubblicazioni di riferimento [21]
20
1.3 – La definizione di un modello
scegliere l’ordine dell’integrazione numerica. Il valore HU (x,y,z) in un generico
punto del dominio CT è determinato con un’interpolazione tri-lineare tra i valori
degli otto punti adiacenti. Questo metodo è computazionalmente più oneroso rispetto al precedente, ma permette di stimare il valore di HU n per ogni elemento
con un metodo più accurato, usando tutte le informazioni disponibili per interpolare i valori di HU all’interno del dominio CT. In questo caso la dimensione
dell’elemento finito non influenza l’accuratezza nella stima di HU n dato che la
descrizione del campo scalare delle HU è non uniforme anche all’interno di ogni
singolo voxel, e tiene conto della distribuzione spaziale delle HU negli otto nodi
circostanti i vertici della griglia di punti CT.
Calibrazione del data-set CT
I valori numerici prodotti da un’acquisizione CT dipendono da molti fattori
legati allo specifico esame, tra cui i parametri fisici impostati dal radiologo come
il KVP (kVolt Peak) o l’X-ray Tube Current; la calibrazione, realizzata in genere con
l’utilizzo di una campione di controllo o fantoccio, è necessaria per trasformare
correttamente i valori misurati in valori significativi di densità di tessuto osseo.
Si assume sia valida una relazione di tipo lineare e che ogni utente possa adottare
la propria relazione, con i parametri opportuni. L’equazione di calibrazione è
allora:
ρn = α + βHU n
(1.3)
dove ρn è la densità assegnata in modo uniforme all’elemento n della mesh, HU n
è il valore uniforme del numero CT, α e β sono i coefficienti di calibrazione forniti
dall’utente.
Definizione del modulo di Young
In letteratura si possono rintracciare molte relazioni che legano la densità del
tessuto osseo al modulo di Young. La relazione viene indicata dall’utente e può
essere sia di tipo lineare che di tipo esponenziale. Si assume che una singola equazione resti valida per tutto l’intervallo di valori di densità. L’equazione adottata
è nella forma:
E n = a + b ρcn
(1.4)
nella quale E n è il valore del modulo di Young assegnato uniformemente all’intero elemento n della mesh, ρn è il corrispondente valore di densità e a, b e c sono i
coefficienti adottati dall’utente. Teoricamente il procedimento può assegnare proprietà differenti ad ogni elemento della mesh: siccome alcuni codici FEM commerciali hanno limitazioni sul numero massimo di materiali presenti, il codice
offre all’utente la possibilità di ridurre il numero di valori per il modulo E impostando un valore soglia per ∆E, con una procedura in grado di assicurare che ad
21
1 – La creazione di modelli numerici subject–specific di segmenti ossei
ogni elemento non venga attribuito un valore inferiore a quello individuato con
l’espressione (1.4).
1.3.4 I problemi dell’approccio FEM mesh
I procedimenti utilizzati per estrarre le informazioni geometriche e materiali dai
dati CT sono spesso affette da errori non trascurabili: questi errori si propagano
in modo ignoto nei vari passi della creazione del modello e affliggono in modo
difficilmente accertabile l’accuratezza dei calcoli.
Errori di risoluzione dello scanner CT
La prima fonte di errore e distorsione è costituita dalla risoluzione a dalla qualità delle immagini del dataset utilizzato, caratteristiche che dipendono dai parametri impostati per la scansione oltre che dalle caratteristiche dello scanner CT.
Errori di segmentazione
La seconda fonte di errore è la segmentazione della regione di interesse: sono stati proposti vari algoritmi di segmentazione caratterizzati da vari gradi di
automazione, partendo dall’estrazione completamente manuale del contorno e
arrivando a complessi algoritmi completamente automatizzati. Qualunque algoritmo di segmentazione si scelga sarà in ogni caso presente un’incertezza nella
definizione del contorno. Nella maggior parte dei casi la segmentazione avviene
facendo uso di algoritmi basati su processi di sogliatura, i cui risultati dipendono dal valore di soglia impostato [22, 6]. Questo errore nella definizione della
geometria si propaga evidentemente attraverso tutti i passi successivi sino alla
creazione della mesh.
Errori di mappatura
In molti studi le informazioni circa la densità ottenute dal data set CT sono
utilizzate per derivare una distribuzione non omogenea delle proprietà meccaniche dei tessuti. Questa procedura prevede due passi: per prima cosa i dati CT
sono calibrati per correlare le Hounsfiel Units HU ai valori di densità apparente o di ash density del tessuto; questa operazione è talvolta realizzata utilizzando
un “fantoccio di calibrazione” [23, 12, 24, 5, 25], ovvero assumendo dei valori
convenzionali attinti dalla letteratura per determinate sezioni (selected regions)
[3]. In entrambi i casi i valori ottenuti non possono essere considerati privi di
errore. Successivamente i valori di densità del tessuto osseo sono correlati con
22
1.3 – La definizione di un modello
i corrispondenti valori di modulo di Young utilizzando equazioni di derivazione empirica ottenuti da indagini sperimentali. I coefficienti di queste equazioni
sono affetti da un’incertezza dovuta a una significativa dispersione di queste misure sperimentali [26, 27, 28, 29].
Le inevitabili incertezze legate ai vari passi di creazione del modello affliggono sicuramente l’accuratezza dei valori ottenuti con il calcolo. Sfortunatamente
questi modelli subject specific non possono essere convalidati da misure dirette
poiché le tecnologie attualmente disponibili non permettono misure di tensione
o di deformazione in vivo che non siano invasive.
La valutazione dell’accuratezza del modello può essere ricavata con due operazioni separate: dapprima si può accertare l’accuratezza intrinseca dei metodi
messi a punto rispetto ai risultati sperimentali di test in vitro; poi può si eseguire
un’analisi di sensibilità per capire quale sia l’effetto delle incertezze delle misure
rilevate in vivo. Mentre la validazione in vitro dei modelli ad elementi finiti di
segmenti ossei è stata realizzata da molti autori, è ancora sconosciuta l’influenza
che gli errori associati alle misure prese in vivo possano avere sui risultati prodotti
da una modello a elementi finiti subject specific.
23
1 – La creazione di modelli numerici subject–specific di segmenti ossei
24
Capitolo 2
Il Metodo delle Celle
Il Metodo delle Celle è un metodo numerico basato sulla formulazione finita diretta delle equazioni dei campi fisici.
Attualmente i metodi numerici partono dalle equazioni di campo scritte in
forma differenziale, ottenute dall’analisi di porzioni infinitesime dei sistemi fisici. La scelta di fissare l’attenzione su porzioni di spazio di estensione tendente a
zero risponde all’intento di ottenere una soluzione esatta dei problemi descritti:
questo obbliga a ridurre le grandezze fisiche (che nascono associate ad intervalli
di tempo o a elementi geometrici di estensione finita) a funzioni del tempo e del
punto, in modo tale da poter applicare gli operatori matematici del calcolo differenziale. Questa strategia costituisce certamente un’importante struttura logica
di studio, ma comporta alcune difficoltà: in primo luogo le funzioni che definiscono le grandezze fisiche devono essere derivabili rispetto alle coordinate di
riferimento: questo fatto comporta difficoltà nella presenza di discontinuità geometriche e nelle proprietà dei materiali. In secondo luogo, la presenza di sorgenti
concentrate (astrazione che rappresenta sorgenti distribuite su estensioni piccole
rispetto alle dimensioni del sistema) introduce singolarità di carattere puramente
matematico. In ultima analisi, le equazioni ottenute con l’approccio differenziale
descrivono il comportamento dei sistemi analizzati in modo “esatto” rispetto alle
ipotesi poste: questa soluzione esatta è per quantitativamente accessibile solo in
pochi e particolari casi: per geometrie in genere regolari ed in presenza di particolari condizioni al contorno.
Per poter analizzare sistemi reali, le equazioni differenziali devono essere discretizzate, fatte risalire cioè dall’infinitesimo a dimensioni che, pur convenientemente piccole, sono comunque finite. Si ottengono in questo modo dei sistemi
di equazioni algebriche, oggi “facilmente” risolvibili con l’utilizzo del calcolatore
elettronico. Per questo scopo sono state elaborate varie metodologie, alcune tra le
25
2 – Il Metodo delle Celle
più note delle quali sono il Metodo delle Differenze Finite (FDT), il Metodo degli
Elementi Finiti (FEM), il Metodo degli Elementi al Contorno (BEM) e il Metodo
dei Volumi Finiti (FVM)1 .
L’implementazione di queste procedure è in genere complessa ed ha il difetto
di perdere il legame con il problema fisico in esame.
Il Metodo delle Celle segue invece una strategia differente: anziché affrontare
le equazioni differenziali, fondate sull’astrazione teorica del punto per descrivere una realtà fisica discreta, il Metodo si basa sulla formulazione discreta diretta
delle leggi fisiche. Fissando l’attenzione direttamente su porzioni di spazio finite,
le leggi fisiche del fenomeno in esame sono scritte cioè direttamente in termini
discreti, partendo dalle leggi sperimentali. Questa strada permette di costruire
direttamente in forma algebrica le equazioni del campo fisico studiato (equazioni
di bilancio, equazioni circuitali, equazioni materiali). Il metodo conserva l’aderenza alla realtà fisica del problema studiato, e al contempo segue la metodologia
dell’approccio sperimentale sia nella scala di osservazione che nell’attribuire le
grandezze fisiche agli elementi geometrici dello spazio.
Questi argomenti meritano una specifica digressione, poiché costituiscono la premessa concettuale della formulazione del Metodo delle Celle.
2.1 Le variabili fisiche
Lo studio delle grandezze fisiche è la prima e fondamentale fase che accompagna
la formulazione di un modello descrittivo di qualunque fenomeno fisico. Volendo inquadrare la formulazione finita di una legge fisica, è importante partire
proprio da una riflessione attorno alle grandezze fisiche, alla loro natura e alla
loro classificazione.
2.1.1 Costanti e variabili
La grandezze fisiche possono dapprima essere divise in due grandi famiglie: un
primo gruppo di grandezze costituito da quei valori che assumono il ruolo di
parametri del problema, descrivendone la natura e qualificando attributi il cui
valore è assunto invariabile nel fenomeno studiato. È questa la categoria delle costanti fisiche cui appartengono tanto le costanti universali (entità come la
carica dell’elettrone o la velocità della luce che sono le stesse per qualsiasi problema venga posto in esame) quanto le costanti materiali, entità costanti nel singolo
1
pur usando la formulazione integrale, il Metodo dei Volumi Finiti è comunque basato sulla
formulazione differenziale
26
2.1 – Le variabili fisiche
problema ma che possono assumere valori di volta in volta differenti in ogni caso
specifico.
La seconda grande categoria di grandezze fisiche è costituita dalle variabili fisiche: si tratta di grandezze il cui valore definisce una singola particolare condizione del sistema trattato. È una categoria di grandezze assai eterogenea tanto
dal punto di vista topologico (entità geometriche cui la grandezza viene riferita)
quanto dal punto di vista “funzionale”: alcune di queste grandezze contribuiscono in genere a definire il problema; altre sono invece oggetto dell’indagine
condotta con il modello matematico; altre ancora sono grandezze che definiscono lo stato energetico del sistema.
Per inquadrare il ruolo e l’importanza delle variabili si possono adottare due criteri di classificazione, il primo basato sull’analisi dell’attribuzione alle entità geometriche del sistema, il secondo che indaga invece il ruolo svolto dalla grandezza
nel descrivere il sistema studiato.
2.1.2 Classificazione in base alle entità geometriche di riferimento
La prima classificazione delle variabili avviene in relazione all’estensione degli
enti geometrici di riferimento, e distingue le variabili globali dalle variabili locali.
• le variabili globali , chiamate anche variabili integrali, sono funzioni di dominio, e sono grandezze associate ad elementi discreti dello spazio e del
tempo: punti (P), linee (L), superfici (S), volumi (V), istanti (I) ed intervalli
di tempo (T).
Le variabili che vengono rilevate sperimentalmente sono di fatto delle variabili globali, e questo fatto è legato alla metodologia stessa della misura,
che associa di necessità le grandezze fisiche ad elementi discreti dello spazio. È così che un contenuto di massa resta naturalmente associato ad un
volume, un flusso di calore ad una superficie, un impulso ad un intervallo
di tempo.
• le variabili locali, note come funzioni di campo, sono invece delle funzioni di punto, analiticamente dipendenti dal posto e dal tempo, e sono le
grandezze comunemente utilizzate dalla formulazione differenziale. Esse
sono ottenute dalle variabili globali a mezzo degli operatori di densità e
di tasso, ossia dal limite del rapporto fra il valore della grandezza globale
e l’estensione dell’elemento spazio-temporale cui la grandezza è riferita, al
tendere a zero di questa estensione; esse sono pertanto slegate dagli attributi
geometrici di partenza.
27
2 – Il Metodo delle Celle
Va infine precisato che le variabili globali associate ai punti (quali ad esempio lo
spostamento nella meccanica dei solidi) si distinguono dalle variabili locali per il
fatto di non essere né densità né tassi.
2.1.3 La classificazione delle variabili in base al ruolo
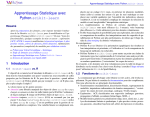
Un’altra importante classificazione avviene invece in relazione al ruolo che le variabili hanno nel descrivere il campo fisico. Sotto questo profilo si individuano:
Figura 2.1.
Classificazione generale delle grandezze fisiche.
• le variabili di configurazione che definiscono appunto la configurazione
del sistema. Appartengono alla stessa categoria tutte le variabili ottenute
28
2.1 – Le variabili fisiche
da variabili di configurazione a mezzo di operazioni di somma, differenza,
moltiplicazione per una costante, integrazione, derivazione spaziale o temporale, a patto che nelle operazioni non figurino costanti fisiche. Nell’ambito della meccanica dei continui sono variabili di configurazione le variabili
geometriche e le variabili cinematiche;
• le variabili di sorgente : sono quelle che definiscono le sorgenti di un campo ossia le entità che generano il campo. Per il campo elastico sono variabili
di sorgente la massa e le forze. Appartengono alla stessa classe tutte le
variabili ottenibili da variabili di sorgente a mezzo di operazioni di somma, differenza, passaggio al limite, derivazione e integrazione, divisione
per una lunghezza, un’area, un volume e un intervallo di tempo. Queste
relazioni non devono contenere costanti fisiche;
• le variabili energetiche sono ottenute dal prodotto di una variabile di configurazione per una variabile di sorgente. Sono variabili energetiche il lavoro,
la potenza e l’energia nelle sue diverse forme (l’energia potenziale, l’energia
cinetica, l’energia interna, ...).
Il Metodo delle Celle tratta variabili globali e trae grandi vantaggi teorici dall’ultima delle tre classificazioni proposte. Lo scopo di una classificazione è quello di ordinare gli elementi classificati chiarendo le relazioni che li accomunano
e quelle che li differenziano. Le classificazioni proposte sono di tipo funzionale e sono di grande aiuto nell’impostazione della formulazione discreta delle
equazioni di campo. Questo fatto è legato alla stretta relazione che si instaura
tra le classi di variabili e orientazione degli elementi geometrici cui le variabili
sono riferite. Come verrà illustrato nel seguito, esiste in sostanza una particolare corrispondenza tra le variabili fisiche ed attributi degli enti geometrici di
appoggio.
Le variabili fisiche globali (siano esse variabili di configurazione, di sorgente
o energetiche) vengono riferite alle strutture geometriche elementari dello spazio
(punti, linee, superfici e volumi) e del tempo (istanti ed intervalli di tempo). Il
segno di queste variabili dipende dall’orientazione attribuita a questi elementi
spaziali e temporali di riferimento.
Considerando, ad esempio, un flusso attraverso una superficie, è del tutto evidente come il suo segno (e quindi anche il suo significato) dipenda dall’orientazione
attribuita alla superficie attraversata. Cambiando l’orientazione della superficie
cambia di conseguenza il segno del flusso, ma il suo significato (ad esempio di
flusso entrante o uscente in un volume di cui la superficie è contorno) non viene
alterato.
29
2 – Il Metodo delle Celle
2.2 L’orientazione degli elementi spaziali
Gli elementi geometrici dello spazio utilizzati usualmente per riferire le variabili
globali possono tutti venire orientati nello spazio. Più precisamente sono possibili due tipi di orientazione di un elemento spaziale, quella interna e quella esterna,
ciascuna delle quali è dotata di versi.
2.2.1 Orientazione interna degli elementi spaziali
L’orientazione interna di un elemento geometrico è un’orientazione che viene fatta sull’elemento stesso. Da un punto di vista puramente geometrico questo significa che per definire un’orientazione interna non necessario stabilire l’ambiente
geometrico in cui l’oggetto inserito.
Si ha così che un punto2 viene orientato internamente stabilendo un verso di “avvicinamento” considerato come positivo, ossia stabilendo se il punto sia “sorgente” oppure “pozzo”. Per orientare internamente una linea se ne stabilisce un
verso di percorrenza; per un elemento di superficie è invece necessario stabilire
un verso di percorrenza del suo contorno. Un volume viene infine orientato internamente quando siano fissate delle orientazioni compatibili sulle sue facce di
contorno.
2.2.2 Orientazione esterna degli elementi spaziali
L’orientazione esterna di un elemento geometrico dipende dalla dimensione dello spazio in cui l’elemento è considerato immerso. Mentre l’orientazione interna
una proprietà intrinseca, l’orientazione esterna cambia, a seconda che l’elemento geometrico sia considerato nel piano o nello spazio. Questo tipo di orientazione è meno immediata di quella interna, e merita una pertanto una disamina
dettagliata.
2
essendo il punto un’entità geometrica priva di estensione è lecito ritenere che una sua orientazione sia priva di senso geometrico. Anche se la nozione non ha un significato immediato, essa ha
comunque senso per le proprietà formali che permette di mantenere. Per analogia si può pensare
all’elevamento a potenza: scrivere n0 un’espressione in sè priva di significato, se rapportata alla
definizione che prevede di moltiplicare n per se stesso, 0 volte. La nota regola na /nb = na−b ,
estesa al caso in cui a = b, permette per di dare significato all’espressione n0 che diviene, come
noto, n0 = na−a = na /na = 1. Attribuire significato all’espressione n0 permette di conservare
le proprietà formali dell’elevamento a potenza.
30
2.2 – L’orientazione degli elementi spaziali
2.2.2.1 Orientazione esterna di una linea
La figura (2.2) rappresenta le possibili orientazioni esterne di un segmento: considerato nel piano, il segmento è orientato esternamente da un verso di attraversamento; nello spazio l’orientazione esterna viene definita da un senso di rotazione
attorno ad esso; in uno spazio unidimensionale l’orientazione è invece costituita
da due frecce che ne stabiliscono idealmente come positiva la trazione ovvero la
compressione.
Figura 2.2. L’orientazione esterna di una linea dipende dalle dimensioni dello
spazio in cui la si considera
2.2.2.2 Orientazione esterna di una superficie
La più nota orientazione esterna di una superficie è quella che viene fatta nello
spazio, attribuendole un verso di attraversamento. È in relazione a questo tipo
di orientazione che assume significato il flusso di una grandezza attraverso una
superficie.
In un ambiente bidimensionale, un elemento di superficie riceve un’orientazione
esterna quando sia attribuita una direzione positiva di attraversamento del suo
contorno (ovvero quando il suo contorno abbia ricevuto un’orientazione esterna).
2.2.2.3 Orientazione esterna di un volume
L’orientazione esterna di un volume (ristretta evidentemente al solo caso tridimensionale, non sussistendo volumi immersi nel piano) è costituita da un verso di attraversamento della sua superficie di contorno. Da notare che anche in
questo caso l’orientazione esterna di un volume viene indotta dall’orientazione
esterna della superficie di contorno.
31
2 – Il Metodo delle Celle
2.2.2.4 Orientazione esterna di un punto
Conservando l’idea di una definizione convenzionale che permetta di conservare
le proprietà formali, anche il punto può essere dotato di un’orientazione esterna.
Ipotizziamo allora di considerare un cubo dotato di orientazione interna e un
punto posto al centro del cubo: i sensi di rotazione definiti sulle facce del volume
possono vedersi come sensi di rotazione delle semirette con origine nel punto. È
ragionevole considerare orientazione esterna di un punto quella costituita dai dei
sensi di rotazione delle semirette con origine nel punto.
Figura 2.3. Orientazioni interna ed esterna degli elementi geometrici di base
nello spazio tridimensionale
Osservazione
Dall’esposizione dei vari casi di orientazione esterna emerge una significativa
dualità tra oggetti muniti di orientazione interna e oggetti dotati di un’orientazione esterna. Questo legame si esprime nel fatto che un’orientazione interna
(esterna) di un oggetto induce un’orientazione esterna (interna) sul suo duale.
Questa regola della mutua induzione ha una piccola eccezione: i punti sono tradizionalmente orientati internamente come pozzi: questo indurrebbe di necessità
un’orientazione esterna dei volumi (entità duali dei punti nello spazio tridimensionale), le cui facce verrebbero a ricevere tutte un verso di attraversamento positivo dall’esterno all’interno del volume. Tradizionalmente, però, si considerano
32
2.3 – L’orientazione degli elementi temporali
quasi sempre positive le normali alle facce uscenti dal volume, assumendo quindi
un’orientazione discorde da quella suggerita dall’orientazione interna di punti.
2.3 L’orientazione degli elementi temporali
Alcune grandezze fisiche sono riferite al tempo. Per le variabili locali il tempo
é una delle coordinate da cui la grandezza può dipendere, al pari delle coordinate spaziali. L’espressione generalizzata di una grandezza locale è infatti g =
g(x,y,z,t).
Le grandezze globali, e dunque nel mondo della realtà discreta, possono essere
invece associate agli istanti di tempo, ovvero essere riferite ad intervalli di tempo: istanti ed intervalli sono le entità temporali di riferimento la cui definizione
è intuitiva perché corrispondente alla quotidiana esperienza di ciascuno: l’istante quel riferimento temporale usato per collocare un evento (ad esempio l’arrivo
dell’autobus ad una fermata); l’intervallo, tempo intercorrente tra due istanti, è
invece il riferimento naturale per fenomeni che non sono puntuali, ma che hanno uno svolgimento nel tempo (ad esempio il tempo necessario all’autobus per
raggiungere la fermata successiva).
Per fare un esempio di ambito fisico, il vettore posizione di una particella r
è una variabile associata agli istanti mentre lo spostamento s è una grandezza
attribuita agli intervalli.
Al pari degli elementi geometrici, anche istanti ed intervalli possono ricevere
tanto un’orientazione interna quanto un’orientazione esterna.
2.3.1 Orientazione interna
La naturale orientazione interna di un intervallo di tempo T è costituita dal verso
assegnato all’asse dei tempi: un intervallo di tempo è cioè orientato dall’istante
precedente a quello successivo. L’orientazione degli istanti è in qualche modo
omologa all’orientazione interna di punti, e il suo significato convenzionale discende dall’esigenza di garantire delle proprietà formali prodotte dall’orientazione interna. Gli istanti sono orientati come pozzi ovvero sono considerati positivi
gli intervalli che arrivano all’istante I e negativi quelli che escono dall’istante I.
2.3.2 Orientazione esterna
L’orientazione esterna è, anche per gli elementi temporali, più complessa.
Consideriamo due intervalli di tempo consecutivi T − e T + , come indicato in figura (2.4) e consideriamo un istante interno a ciascun intervallo, ad esempio gli
33
2 – Il Metodo delle Celle
istanti medi, indicati rispettivamente con le notazioni Ie− ed Ie+ Questi istanti vengono detti istanti duali, poiché si pongono come corrispondenti agli intervalli di
tempo definiti da coppie di istanti primali. L’intervallo di tempo Te che decorre
tra due istanti duali prende il nome di intervallo duale. Vi è un’evidente corrispondenza (dualità) fra istanti primali e intervalli duali e fra intervalli primali e
istanti duali.
L’orientazione interna di un’istante primale induce naturalmente un’orientazione del corrispondente intervallo duale. Questa appenda descritta è l’orientazione
esterna di un intervallo, che corrisponde, per analogia, ad una sorta di trazione o
compressione dell’intervallo.
Analogamente l’orientazione interna di un intervallo primale trasferisce sull’istante duale corrispondente una direzione di attraversamento, che ne costituisce
l’orientazione esterna.
Figura 2.4.
Orientazione esterna degli istanti e degli intervalli di tempo
Si noti che sull’asse dei tempi si sono individuate due classi entità: gli istanti temporali I tra cui sono individuati gli intervalli T costituiscono un primo ordine di
elementi, denominati primali. Da questi elementi si sono ricavati gli istanti Ie ed
i corrispondenti intervalli Te: queste entità sono denominate duali, poiché corrispondenti alle entità primali, e sono ad esse strettamente correlate.
Istanti e intervalli primali sono dotati di orientazione interna; istanti e intervalli
duali sono invece dotati di orientazione interna, indotta dall’orientazione delle
corrispondenti entità primali.
34
2.4 – Attribuzione delle variabili agli elementi geometrici
2.4 Attribuzione delle variabili agli elementi geometrici
Le grandezze fisiche globali sono associate ad elementi geometrici orientati. In
termini generali si può affermare che la definizione stessa di una variabile, ovvero le sue modalità di misura sperimentale, forniscono l’indicazione dell’ente
geometrico cui la grandezza è riferita. Circa invece l’orientazione di questo ente
geometrico (interna o esterna) si osserva che per molte variabili il cambiamento
di orientazione dell’ente geometrico comporta un cambiamento di segno della
variabile stessa.
Queste affermazioni vengono di molto chiarite da qualche esempio: il già citato caso del flusso (ad esempio di calore) attraverso una superficie è per definizione la quantità di calore che fluisce attraverso una superficie assegnata in un
dato intervallo di tempo. Il flusso è dunque una grandezza naturalmente associata agli elementi di superficie e agli intervalli di tempo. Si tratta ora di stabilire se
l’orientazione degli elementi di superficie sia interna o esterna: si osserva allora
che il flusso indica una quantità in transito attraverso al superficie: cambiando il
verso positivo di attraversamento della superficie il valore del flusso cambia di
segno. Poiché indicare un verso di attraversamento positivo significa precisare
un’orientazione esterna, si ha evidentemente che il flusso è riferito ad elementi di
superficie orientati esternamente.
Per proseguire nell’ambito della termostatica, risulta evidente che la temperatura
è una variabile associata ai punti, e che la differenza di temperatura é di conseguenza associata a segmenti: cambiando il verso di percorrenza del segmento la
differenza di temperatura cambia segno; l’orientazione dei segmenti di riferimento è quella interna.
Analoga situazione si ha per le attribuzioni agli elementi temporali. Una grandezza può essere associata agli istanti oppure ad intervalli di tempo; nella precedente sezione (2.3) si è parlato di istanti e di intervalli primali e duali: gli elementi
primali dotati di orientazione interna, gli enti duali di orientazione esterna.
Una grandezza associata agli intervalli che cambi segno per inversione temporale, necessita evidentemente di un’orientazione interna dell’intervallo di tempo,
essendo legata al verso di percorrenza. Peraltro non si vede il significato fisico
del cambiamento del verso per un intervallo dotato di orientazione esterna.
La velocità, che cambia segno invertendo la direzione di percorrenze dell’asse dei
tempi, viene indubbiamente associata a intervalli primali, mentre l’impulso, invariante rispetto al verso di percorrenza, è legato ad intervalli duali.
35
2 – Il Metodo delle Celle
In conclusione si può rilevare come le variabili di configurazione risultino sistematicamente associate elementi dotati di orientazione interna; per contro le
variabili di sorgente risultano associate ad elementi dotati di orientazione esterna.
2.5 I complessi di celle
Nella trattazione differenziale si utilizzano le funzioni di punto e risultano pertanto fondamentali i sistemi di coordinate, utili a collocare i punti nello spazio e,
quindi, a collocare le grandezze fisiche.
La trattazione discreta considera invece grandezze globali che sono, come detto, riferite a punti, linee, superfici e volumi. Il riferimento spaziale costituito dai
sistemi di coordinate risulta pertanto uno strumento insufficiente: è necessaria
invece una struttura organizzata di elementi geometrici (volumi, facce, spigoli e
punti) a cui poter attribuire le grandezze da collocare nello spazio. Questa struttura costituita dai complessi di celle.
In termini pratici l’operazione non è nuova: si tratta di dividere il dominio in tante porzioni (celle) di forma arbitraria e di dimensioni opportune. Questo primo
complesso di celle è detto complesso primale: esso è sin qui analogo all’insieme
di elementi delle mesh che si usano comunemente quando si adopera un metodo numerico tradizionale che discretizza le equazioni differenziali. Nonostante
questa iniziale analogia, si preferisce utilizzare il termine “complesso di celle” in
luogo di mesh, in quanto tutti gli elementi geometrici che formano il complesso
sono coinvolti nella formulazione discreta.
Vi è poi un’altra differenza fra “mesh” tradizionalmente intesa e i complessi di
celle: dato un complesso di celle di forma qualunque, si può individuare in maniera arbitraria un punto all’interno di ogni cella. Congiungendo tali punti interni
per ogni coppia di celle adiacenti si ottiene un secondo complesso di celle. A questo secondo complesso di celle si dà il nome di complesso duale.
Vi è una stretta corrispondenza reciproca (dualità) tra i due complessi di celle,
tale da giustificare l’attributo di “duale” nella denominazione del secondo sistema di celle: innanzitutto ad ogni elemento del complesso primale corrisponde
un opportuno elemento del complesso duale, secondo il legame illustrato nella
seguente tabella (2.5)
Un complesso di celle, inteso come insieme piccole porzioni adiacenti che
compongono un dominio, è formato da punti, spigoli, facce e volumi: topologicamente questi elementi sono considerati celle di dimensione, rispettivamente
zero, uno, due e tre, e si parla infatti di 0-celle, 1-celle, 2-celle e 3-celle. Dal punto
di vista topologico un complesso di celle è non già un insieme di volumi, quanto
piuttosto un insieme di celle di varia dimensione. Dal punto di vista formale ad
36
2.5 – I complessi di celle
elementi del complesso primale
punti P
linee L
superfici S
volumi V
⇔
⇔
⇔
⇔
elementi del complesso primale
volumi Ve
superfici Se
e
linee L
punti Pe
Figura 2.5. Celle primali e celle duali nello spazio a 2 e a 3 dimensioni
una cella primale di ordine p corrisponde un elemento del sistema duale di ordine n − p, e viceversa, essendo n la dimensione dello spazio in cui si considera il
sistema di celle.
Altro aspetto di dualità riguarda l’orientazione degli elementi dei due sistemi di
celle: la figura (2.3) evidenzia come un’orientazione interna delle celle primali
induca un’orientazione esterna delle corrispondenti celle duali.
La figura (2.5) illustra la formazione di celle duali nel piano e nello spazio con
diverse forme di celle primali. Va rilevato il fatto che tanto la scelta del punto
all’interno di ogni cella primale (0-cella duale in ogni 2 o 3-cella primale), quanto
il modo di unire tali punti (collegamento diretto oppure appoggiato al baricentro
37
2 – Il Metodo delle Celle
dei lati o delle facce delle celle primali) sono assolutamente arbitrari. Le più semplici figure geometriche che compongono un complesso di celle nel piano sono
i triangoli: un complesso del genere viene pertanto detto complesso simpliciale;
il complesso simpliciale nello spazio è invece costituito da tetraedri. Per entrambi questi complessi la costruzione delle celle duali viene comunemente effettuata
adottando come punti duali i baricentri oppure i circocentri (sferocentri) delle celle primali.
Rispetto ai termini dell’orientazione viene chiamato primale il complesso di celle cui si attribuisce orientazione interna; conseguentemente il complesso duale è
quello che riceve dal complesso primale un’orientazione sterna.
Un’altro aspetto della dualitá dei sistemi di celle riguarda l’attribuzione delle grandezze fisiche agli elementi geometrici: se associamo alle celle del sistema
primale le variabili fisiche di configurazione, e attribuiamo dunque al complesso
primale orientazione interna, si produce una naturale associazione delle variabili
di sorgente (che come detto necessitano di orientazione esterna) ai corrispondenti elementi duali. La costruzione del sistema duale mette cioè a disposizione le
strutture necessarie ad “ospitare” le variabili di sorgente che completano la definizione del sistema fisico in esame.
Questa è la manifestazione di una stretta corrispondenza che sussiste fra la
classificazione fisica delle variabili e la classificazione geometrica. La sistematica
associazione fra variabili fisiche ed elementi spaziali orientati dei due sistemi di
celle è un punto fondamentale per la formulazione finita diretta delle leggi fisiche
dei campi.
Resta ora evidente una sostanziale differenza fra i complessi di celle e le “mesh” tradizionali:
• costruire un complesso di celle significa certo dividere un dominio in tante
porzioni discrete, ma significa anche costruire il sistema di elementi geometrici duali a quelli appena creati. Questa operazione, che è funzionale alla
formulazione discreta usta dal Metodo delle Celle, non ha un omologo nella
pratica usuale dei metodi numerici citati;
• le variabili globali sono associate alle celle (0-celle = vertici; 1-celle = lati;
2-celle = facce; 3-celle = volumetti). Data una grandezza Q associata ad
elementi spaziali di dimensione p, ne viene che ad ogni cella p-dimensionale
ck del complesso di celle risulta associato un valore Qk della grandezza Q. In
questo modo la distribuzione della grandezza Q è descritta dalla N -pla (Q1 ,
Q2 , . . . , QN ). Nella topologia algebrica una tale distribuzione porta il nome
(quanto mai infelice) di “co-catena”. Noi la denoteremo con un termine più
38
2.6 – Impostazione del problema con il Metodo delle Celle
semplice ed espressivo di distribuzione p-dimensionale. Essa è l’analogo
di una funzione di campo, usata nella formulazione differenziale, la quale
associa ad ogni punto (non ad ogni p-cella) la densità q della grandezza Q.
Una distribuzione p-dimensionale è una funzione di dominio o funzione di
insieme mentre una funzione di campo è una funzione di punto.
2.6 Impostazione del problema con il Metodo delle
Celle
Un problema fisico viene ben posto quando siano precisati:
• forma e dimensione del dominio;
• natura e posizione delle sorgenti;
• le caratteristiche materiali;
• le condizioni al contorno.
Risolvere il problema di campo significa allora determinare la distribuzione spaziale e temporale della variabile principale di configurazione (denominata in genere come potenziale del problema in esame). Qualunque strada si segua per
affrontare la soluzione del problema, si perviene sempre alla formulazione di
un’equazione fondamentale, algebrica o differenziale a seconda dell’impostazione adottata. Questa equazione nasce dalla composizione di due categorie di
equazioni:
• equazioni di struttura;
• equazioni costitutive.
2.6.1 Equazioni di struttura
Le equazioni di struttura sono le equazioni che forniscono la struttura di una
teoria e ne forniscono, per così dire, le colonne portanti. Esse sono dette anche
equazioni topologiche e legano di fatto grandezze associate a celle di ordine n
a celle di ordine n + 1: è il caso del gradiente di una funzione, grandezza associata alla linea che congiunge due punti in cui sono noti dei valori scalari; le
equazioni circuitali associano invece ad una superfici una grandezza correlata a
grandezze associate alle linee; le equazioni di bilancio realizzano infine una relazione fra grandezze associate a superfici con grandezze associate ai volumi. Le
caratteristiche di queste equazioni sono:
39
2 – Il Metodo delle Celle
• legare tra di loro variabili dello stesso tipo (variabili di configurazione con
variabili di configurazione, variabili di sorgente con variabili di sorgente);
• non contenere costanti materiali;
• essere valide a qualsiasi scala dimensionale.
La validità ad ogni scala dimensionale significa in particolare che le equazioni di
struttura sono le stesse a prescindere dalla forma, dalle dimensioni e dalla natura
del mezzo materiale della porzione di campo sul quale sono scritte. In particolare si ha che le equazioni di struttura valgono, inalterate, tanto per la trattazione
differenziale quanto per quella discreta.
Equazioni di bilancio
Le equazioni fondamentali di molte teorie fisiche sono basate su un’equazione
di bilancio. Considerata una regione chiusa dello spazio V in cui sia definita una
generica grandezza estensiva Q, l’equazione di bilancio esprime le variazioni della grandezza Q che si realizzano all’interno del volume V in un dato intervallo di
tempo T . Nella sua forma generale un’equazione di bilancio può essere espressa
come:
Qprod = Qacc + Qusc
(2.1)
dove
Qprod è la produzione netta della grandezza Q entro il volume V nell’intervallo
di tempo T ;
Qacc è l’accumulo netto della grandezza Q entro il volume V nell’intervallo di
tempo T ;
Qusc è il flusso uscente netto della grandezza Q attraverso la superficie di contorno del volume V nell’intervallo di tempo T ;
A sua volta la quantità accumulata Qacc à costituita dalla differenza:
Qacc = Qf inale − Qiniziale
(2.2)
fra la quantità contenuta entro V all’istante finale e all’istante iniziale dell’intervallo di tempo T su cui si considera il bilancio.
Quando il termine di produzione di Q sia nullo, si parla di equazione di conservazione; sono equazioni di conservazione l’equazione di bilancio della massa per
un sistema chiuso e l’equazione di bilancio dell’energia di un sistema isolato.
Un’altra specializzazione dell’espressione generale dell’equazione di bilancio si
40
2.6 – Impostazione del problema con il Metodo delle Celle
ha nel caso di sistemi stazionari, ovvero sistemi che non hanno evoluzione nel
tempo. È il caso del bilancio statico delle forze che descrive l’equilibrio di un
corpo, per il quale si ha un’espressione generale del tipo:
F [∂ Ve ] + F [Ve ] = 0
(2.3)
dove F [Ve ] descrive le forze di volume agenti sul volume Ve , mentre il termine
F [∂ Ve ] le forse di superficie che agiscono sul suo contorno.
Va notato che la forza può essere vista come flusso della quantità di moto, e pertanto l’equazione di equilibrio può essere vista come equazione di stazionarietà
del flusso della quantità di moto.
Appare infine rilevante accennare al fatto che il bilancio più che una legge fisica in
sè, è un costrutto della pensiero logico dell’uomo che trova applicazioni in molti
ambiti applicativi. La sua importanza oltre che concettuale è quella di porre in
relazione quantità (accumulate, prodotte, transitate) definite da altre leggi fisiche.
2.6.2 Equazioni costitutive
Le equazioni costitutive sono delle relazioni che definiscono la costituzione del
sistema, riportando i parametri caratteristici del mezzo in cui hanno luogo i fenomeni studiati. Queste equazioni caratterizzano il comportamento dei materiali
presenti rispetto al problema studiato, e pertanto identificano un modello di comportamento. Sono esempi di legge costitutiva le leggi nella meccanica dei solidi
che descrivono il modello di comportamento elastico, plastico, viscoelastico di un
materiale.
Le equazioni costitutive sono anche chiamate equazioni di comportamento o, nella
termostatica, equazioni di stato. Caratteristiche essenziali delle equazioni costitutive sono:
• legare variabili differenti (variabili di configurazione con variabili di sorgente);
• contenere costanti materiali;
• essere valide in regioni a campo uniforme, intendendo per campo uniforme
l’uniformità del gradiente del potenziale del campo.
Di fatto le equazioni costitutive costituiscono un “ponte” tra le variabili di configurazione e le variabili di sorgente di uno stesso campo.
Il requisito di uniformità del campo pone dei limiti precisi alla validità delle equazioni costitutive: il problema viene affrontato in modo diverso dalla trattazione
differenziale e quella discreta. L’approccio differenziale scrive le equazioni relativamente ad intorni infinitesimi del punto, situazione in cui qualsiasi funzione
41
2 – Il Metodo delle Celle
è approssimabile al primo ordine e, di conseguenza, il suo gradiente risulta uniforme. La formulazione discreta considera invece porzioni di sistema piccole ma
finite, all’interno delle quali si considera il campo uniforme. Questa strada, seguita dal Metodo delle Celle, accetta a priori un’approssimazione cui si è comunque
costretti all’atto di discretizzare le equazioni ottenute con l’approccio differenziale che vengono “forzate” (non senza accettare approssimazioni) ad avere validità
su porzioni di sistema di estensione finita.
2.6.3 I diagrammi di Tonti
Per la formulazione di un modello di analisi di un sistema fisico, viepiù quando
si intenda fornirne una formulazione discreta, è essenziale individuare le grandezze coinvolte e gli enti geometrici cui esse sono riferite. Secondariamente, in
termini logici, é necessario rilevare le relazioni che sussistono tra le grandezze tra
di loro e nella loro eventuale evoluzione temporale. Si ottiene in questo modo il
quadro completo della struttura logica utilizzata, strumento molto importante ai
fini tanto della rappresentazione del modello di analisi quanto per l’implementazione di procedure per il calcolo per via numerica della soluzione.
Un’efficace rappresentazione sintetica del modello fisico approntato per la soluzione di un problema offerta dai diagrammi di Tonti: si tratta di grafici che evidenziando il percorso che conduce alle equazioni risolutive passando attraverso
le varie equazioni di struttura e costitutive. Inoltre evidenziano la suddivisione
in variabili di sorgente e configurazione e presentano le attribuzioni delle variabili stesse agli enti geometrici e temporali. Uno schema generale di riferimento
presentato in figura (2.6). Il diagramma è tridimensionale, e si compone di due
piani: il secondo piano, rappresentato a tratto fine, ospita le grandezze integrali
nel tempo; in primo piano (in grassetto) sono invece collocate le grandezze che
si ottenute dalle precedenti tramite un’operazione di differenza nel tempo, ossia
l’analogo discreto della derivazione temporale.
In ciascun piano figurano due colonne di caselle, cui corrispondono i simboli
P, L, S e V che si riferiscono rispettivamente ai punti, alle linee, alle superfici e
ai volumi. La colonna di sinistra rappresenta le entità primali, quella di destra
le corrispondenti entità duali. Da notare che gli elementi duali, in ordine ovviamente inverso, sono identificate dalle stesse lettere cui è sovrapposto il simbolo
tilde.
Poiché le caselle sono destinate ad ospitare una o più grandezze coinvolte nella
formulazione, ne deriva che le variabili di configurazione si collocheranno nelle
caselle della colonna di sinistra, mentre le variabili di sorgente troveranno collocazione nelle caselle della colonna di destra. Le equazioni di struttura, che legano
42
2.6 – Impostazione del problema con il Metodo delle Celle
Figura 2.6. Schema generale di un diagramma di Tonti per l’illustrazione delle variabili, delle entità geometriche (n-celle) di riferimento e delle equazioni che
definiscono le relazioni tra le grandezze coinvolte
variabili dello stesso tipo, sono rappresentate da frecce verticali; le equazioni costitutive, che costituiscono invece una sorta di “ponte” tra le due categorie di
grandezze, rappresentate da frecce orizzontali od oblique che collegano caselle
appartenenti a colonne opposte. L’equazione risolvente si ottiene componendo le
equazioni di struttura e quelle costitutive, ottenendo un legame fra variabile di
configurazione e quella di sorgente del campo.
Lo schema proposto è certamente uno schema generale e non è detto che tutti i
legami che è possibile indicare debbano necessariamente essere sempre presenti.
Nel caso di problemi stazionari, ad esempio, il diagramma perde evidentemente la sua tridimensionalità e si riduce ad una rappresentazione piana dei legami
tra le grandezze coinvolte. Le figure (2.7) e (2.8) riportano il diagramma di Tonti per il problema elastico, riassumendo con evidente sinteticit le relazioni fondamentali della meccanica dei continui nella formulazione differenziale e finita,
rispettivamente..
43
2 – Il Metodo delle Celle
Figura 2.7.
Diagramma di Tonti per la formulazione differenziale dell’elestostatica
44
2.6 – Impostazione del problema con il Metodo delle Celle
Figura 2.8. Diagramma di Tonti per la formulazione finita dell’elestostatica
45
2 – Il Metodo delle Celle
46
Capitolo 3
Formulazione quadratica con il
Metodo delle Celle
Rispetto al Metodo degli Elementi Finiti, il Metodo delle Celle utilizza un approccio metodologico completamente diverso: l’uso delle variabili di dominio in
luogo delle funzioni di punto, l’attribuzione delle grandezze agli elementi geometrici secondo i processi sperimentali utilizzati per la loro misura, sono due
elementi fondamentali che portano ad una formulazione discreta diretta senza
dover fare ricorso alla formulazione differenziale. È stato dimostrato [30] che,
pur usando un approccio completamente diverso, il CM, usando i simplessi, è in
grado di ottenere la stessa matrice di rigidezza costruita con il Metodo degli Elementi Finiti. Relativamente all’uso dei simplessi, la differenza tra i due metodi, in
termini di risultati ottenibili, risiede solo nella differente costruzione del termine
noto del sistema lineare che descrive la soluzione approssimata del problema. In
particolare i due metodi sono caratterizzati dallo stesso valore di ordine di convergenza.
Quando però si adotti la formulazione quadratica, il Metodo delle Celle ha dimostrato di poter ottenere il quarto ordine di convergenza, superiore al valore
ordinariamente ottenibile dal FEM con la medesima interpolazione. Questo è
possibile grazie ad una particolare costruzione del complesso di celle duale ottenuta appoggiando la divisione delle celle primali ai punti di Gauss dei suoi lati.
Questa proprietà è stata verificata relativamente alla soluzione numerica dell’equazione di Poisson per domini bidimensionali. Resta l’interrogativo circa il fatto
che questa possibilità di ottenere il quarto ordine di convergenza permanga nella
soluzione dei problemi tridimensionali.
In questo capitolo verrà presentata l’implementazione dell’interpolazione quadratica per la soluzione dell’equazione di Poisson in domini tridimensionali con
il Metodo delle Celle; verrà dimostrato come, ancora, un’opportuna costruzione
47
3 – Formulazione quadratica con il Metodo delle Celle
del complesso duale permetta di ottenere l’ordine di convergenza 4. In conclusione l’uso dell’interpolazione quadratica verrà presentato nella sua estensione allo
studio dei corpi elastici in regime di piccoli spostamenti, verificando la precisione
della soluzione ottenibile in un problema di riferimento standard e comparando
i risultati sia con la soluzione teorica del problema che con i valori ottenuti da un
analisi FEM di confronto.
3.1 Problemi scalari tridimensionali
In questo paragrafo verrà presentata l’implementazione del Metodo delle Celle
con interpolazione quadratica nella soluzione dell’equazione di Poisson in domini tridimensionali.
Come problema di riferimento viene assunta la conduzione termica in regime stazionario. Dopo l’illustrazione dell’implementazione verrà descritto il test di valutazione dell’accuratezza nella soluzione di un problema di controllo di cui è nota
la soluzione analitica, comparando i risultati con quanto ottenuto da un’analisi
gemella (con identiche mesh, interpolazione e condizioni al contorno) condotta
con un codice commerciale FEM.
3.1.1 Interpolazione quadratica
Il campo delle temperature viene approssimato all’interno di ogni cella con un
polinomio di secondo grado:
T (x,y,z) = a + bx + cy + dz + exy + f yz + gzx + hx2 + iy 2 + lz 2
(3.1)
La funzione, che ha 10 coefficienti, richiede l’uso di un tetraedro a 10 nodi: la
cella viene completamente definita dai suoi 4 vertici e dai punti medi dei suoi 6
lati; si vuole interpolare la temperatura in termini dei valori ai nodi. Al fine di
poter disporre di una formulazione assolutamente generale ed indipendente dalla geometria della singola cella è conveniente adottare, in luogo del riferimento
cartesiano globale, un riferimento locale per ciascuna cella. Un riferimento locale
è offerto dalle coordinate affini locali definito dai tre lati uscenti da uno stesso
vertice.
48
3.1 – Problemi scalari tridimensionali
Figura 3.1. Cella tetraedrica a 10 nodi: disposizione e denominazione convenzionale dei vertici e sistema di riferimento locale di coordinate affini
3.1.1.1 Riferimento locale di coordinate affini
Il legame tra le coordinate locali affini e le coordinate cartesiane globali è lineare:
ξ
(x
−
x
)
(x
−
x
)
(x
−
x
)
x
x
j
i
k
i
l
i
i
y = yi + (yj − yi ) (yk − yi ) (yl − yi ) η .
(zj − zi ) (zk − zi ) (zl − zi )
ζ
zi
z
(3.2)
che, con una sintetica notazione vettoriale di evidente significato, può venire
espressa come:
r = ri + Jc s
(3.3)
ξ
α
β
γ
r
x
η = s + δ ² θ y
ζ
t
µ ν π
z
(3.4)
La relazione inversa è dunque:
49
3 – Formulazione quadratica con il Metodo delle Celle
essendo
α
β
γ
δ
²
θ
µ
ν
π
=
=
=
=
=
=
=
=
=
1/A [(yk − yi ) (zl − zi ) − (yl − yi ) (zk − zi )]
1/A [(xl − xi ) (zk − zi ) − (xk − xi ) (zl − zi )]
1/A [(xk − xi ) (yl − yi ) − (xl − xi ) (yk − yi )]
1/A [(yl − yi ) (zj − zi ) − (yj − yi ) (zl − zi )]
1/A [(xj − xi ) (zl − zi ) − (xl − xi ) (zj − zi )]
1/A [(xl − xi ) (yj − yi ) − (xj − xi ) (yl − yi )]
1/A [(yj − yi ) (zk − zi ) − (yk − yi ) (zj − zi )]
1/A [(xk − xi ) (zj − zi ) − (xj − xi ) (zk − zi )]
1/A [(xj − xi ) (yk − yi ) − (xk − xi ) (yj − yi )]
(3.5)
(3.6)
(3.7)
(3.8)
(3.9)
(3.10)
(3.11)
(3.12)
(3.13)
e
r =
(xi yk − xk yi ) zl + (xl yi − xi yl ) zk + (xk yl − xl yk ) zi
B
(3.14)
s =
(xi yj − xj yi ) zl + (xl yi − xi yl ) zj + (xj yl − xl yj ) zi
B
(3.15)
t =
(xi yj − xj yi ) zk + (xk yi − xi yk ) zj + (xj yk − xk yj ) zi
B
(3.16)
essendo
A = (xj − xi ) [(yk − yi ) (zl − zi ) − (yl − yi ) (zk − zi )] +
(xk − xi ) [(yl − yi ) (zj − zi ) − (yj − yi ) (zl − zi )] +
(xl − xi ) [(yj − yi ) (zk − zi ) − (yk − yi ) (zj − zi )] (3.17)
e
B = [(xj − xi ) yk + (xi − xk ) yj + (xk − xj ) yi ] zl
+ [(xi − xj ) yl + (xl − xi ) yj + (xj − xl ) yi ] zk
+ [(xk − xi ) yl + (xi − xl ) yk + (xl − xk ) yi ] zj
+ [(xj − xk ) yl + (xl − xj ) yk + (xk − xl ) yj ] zi
(3.18)
50
3.1 – Problemi scalari tridimensionali
3.1.1.2 La funzione interpolante
Nel sistema di riferimento delle coordinate affini locali1 il polinomio che interpola
i valori delle temperature nodali all’interno della cella assume la forma:
ah
ai
a
j
a
k
©
ª
al
T c (ξ,η,ζ) = 1 ξ η ζ ξη ηζ ζξ ξ 2 η 2 ζ 2
.
(3.19)
a
m
a
n
a
o
ap c
I dieci coefficienti incogniti si determinano imponendo che il polinomio assuma
ai nodi i valori noti:
1 0
0
0
0
0
0
0
0
0
Th
a
h
1 1
0
0
0
0
0
1
0
0
Ti
ai
1 0
1
0
0
0
0
0
1
0
T
a
j
j
1 0
0
1
0
0
0
0
0
1
Tk
ak
1 1/2 0
0
0
0
0 1/4 0
0
Tl
al
(3.20)
=
1 1/2 1/2 0 1/4 0
0 1/4 1/4 0
Tm
am
1 0 1/2 0
0
0
0
0 1/4 0
Tn
a
n
1 0
0 1/2 0
0
0
0
0 1/4
T
a
o
o
1 1/2 0 1/4 0
0 1/4 1/4 0 1/4
Tp c
ap c
1 0 1/2 1/2 0 1/4 0
0 1/4 1/4
invertendo la quale si ottiene il vettore dei coefficienti del polinomio interpolante
espresso in funzione delle temperature nodali:
1
0
0
0
0 0 0
0 0 0
Th
ah
−3 −1 0
0
4 0 0
0 0 0
T
a
i
i
−3
0
−1
0
0
0
4
0
0
0
T
a
j
j
−3
0
0
−1
0
0
0
4
0
0
T
ak
k
4
0
0
0
−4
4
−4
0
0
0
Tl
al
(3.21)
=
4
0
0
0
0 0 −4 −4 0 4
Tm
am
4
0
0
0 −4 0 0 −4 4 0
T
a
n
n
2
2
0
0
−4
0
0
0
0
0
T
a
o
o
2
0
2
0
0 0 −4 0 0 0
Tp c
ap c
2
0
0
2
0 0 0 −4 0 0
1
la linearità del legame tra coordinate affini locali e coordinate cartesiane locali rende
indifferente la scelta del sistema di riferimento
51
3 – Formulazione quadratica con il Metodo delle Celle
ovvero
ac = C−1 Tc .
(3.22)
L’adozione delle coordinate affini locali offre dunque un significativo vantaggio:
i coefficienti della matrice dell’equazione (3.20) sono costanti, indipendenti dalla
cella, dalla sua geometria e dalla sua disposizione spaziale. Adottando il riferimento cartesiano globale i coefficienti della matrice sarebbero stati invece funzione delle coordinate dei nodi della cella e questo avrebbe obbligato al calcolo della
matrice inversa per l’equazione (3.21) per ogni cella con conseguente maggiore
costo computazionale della procedura2
L’espressione (3.19) può dunque essere scritta nella sintetica forma:
©
ª
T c (ξ,η,ζ) = 1 ξ η ζξη ηζ ζξ ξ 2 η 2 ζ 2 C−1 Tc .
(3.23)
che permette di calcolare il valore della temperatura in un punto P interno alla
cella c noti i valori delle sue coordinate ξ η ζ nel sistema di riferimento locale.
3.1.1.3 Gradiente
Nella generica cella c il vettore gradiente gc è definito dalle componenti:
0
1
0
0
η
0
ζ
2ξ
0
0
∂
T
ξ
−1
C Tc .
0
0
1
0
ξ
ζ
0
0
2η
0
∂η T
=
0 0 0 1 0 η ζ 0 0 2ζ
∂ζ T
Le componenti del gradiente sono:
∂ξ T
∂x ξ ∂ x η ∂ x ζ
∂x T
gx
gy = ∂y T
= ∂y ξ ∂ y η ∂ y ζ ∂η T
∂ζ T
∂z T
∂z ξ ∂ z η ∂ z ζ
gz
(3.24)
(3.25)
dall’equazione (3.4) si ha:
0 1 0 0 η 0 ζ 2ξ 0 0
α δ µ
gx (ξ,η,ζ)
0 0 1 0 ξ ζ 0 0 2η 0 C−1 Tc .
β
²
ν
gy (ξ,η,ζ) =
0 0 0 1 0 η ζ 0 0 2ζ
gz (ξ,η,ζ)
γ θ π
2
(3.26)
dal punto di vista computazionale vi è poi un ulteriore vantaggio nell’adozione delle coordinate locali affini: quando i coefficienti della matrice dipendono dalle coordinate, essi assumono
valori che decrescono al diminuire delle dimensioni della cella e questo peggiora la precisione
con cui gli algoritmi disponibili calcolano i coefficienti della matrice inversa.
52
3.1 – Problemi scalari tridimensionali
3.1.1.4 Equazione costitutiva
Il legame tra il vettore flusso di calore q e il gradiente della temperatura g è detto equazione costitutiva. In un mezzo anisotropo questo legame viene espresso
nella forma:
kxx kxy kxz gx (x,y,x)
qx (x,y,x)
qy (x,y,x)
= − kyx kyy kyz gy (x,y,x)
(3.27)
qz (x,y,x) c
kzx kzy kzz c gz (x,y,x) c
Indicando con Kc la matrice 3x3 (detta matrice di conduttività termica della cella
c) il legame costitutivo puó essere espresso nella forma matriciale:
qc = −Kc gc
(3.28)
Se il materiale di cui si compone la cella c è, dal punto di vista della conduzione
termica, isotropo, gli elementi della matrice di conduttività termina Kc divengono
tra loro identici e l’equazione (3.27) assume la forma:
qx = −kgx
qy = −kgy
qz = −kgz
(3.29)
o, in forma vettoriale
qc = −k gc
(3.30)
nota come equazione di Fourier.
3.1.1.5 Flusso di calore
Il vettore gradiente g e il flusso di calore q sono funzioni affini delle coordinate; di conseguenza il flusso di calore Q attraverso una superficie A è esprimibile come prodotto scalare del vettore area che definisce la superficie per il vettore flusso unitario q valutato nel baricentro G della superficie stessa. Essendo
A = {Ax , Ay Az } il vettore area e G il suo baricentro, si ha:
q
(G)
x
¡
¢
qy (G) .
Q(A) = A q = Ax Ay Az
(3.31)
qz (G)
3.1.1.6 Bilancio
L’equazione fondamentale del problema viene ottenuta scrivendo il bilancio termico riferito alle regioni tributarie associate ad ogni nodo del sistema. Queste
regioni tributarie sono offerte dalle celle duali. Siccome le regioni tributarie sono
53
3 – Formulazione quadratica con il Metodo delle Celle
arbitrarie per forma e per estensione3 , anche il criterio di definizione delle celle
duali è anch’esso arbitrario. Questo significa, in termini pratici, che tutti i criteri di divisione delle celle tetraedriche in porzioni associate ai suoi nodi sono di
principio ammissibili, ancorché, almeno dal punto di vista computazionale, non
equivalenti.
Nel caso bidimensionale con i simplessi ad interpolazione quadratica si è ve-
Figura 3.2. Suddivisione del tetraedro in porzioni duali basata sui punti Gauss dei lati
rificata una dipendenza tra il criterio di definizione delle celle duali e il grado
di convergenza del Metodo. In particolare quando la creazione delle celle duali venisse appoggiata ai punti di Gauss dei lati delle celle primali, il metodo ha
presentato ordine di convergenza pari a 4, superiore a quanto ordinariamente
ottenibile con una corrispondente analisi condotta con il FEM.
Assunto un criterio per la definizione della suddivisione duale vi sono due
possibili modi di procedere:
• esaminando un nodo alla volta, individuare l’insieme I (n) delle celle che
afferiscono al nodo e definire il poliedro (cella) duale del nodo che ne costituisce la regione tributaria: il poliedro duale sarà composto da varie porzioni ciascuna delle quale risulterà appartenere ad una cella primale differente.
3
l’equazione di bilancio ha valore a prescindere sia dalla forma che dalle dimensioni della
regione a cui è riferita
54
3.1 – Problemi scalari tridimensionali
Figura 3.3. Suddivisione duale per celle triangolari con interpolazione quadratica: a sinistra la divisione è di tipo “baricentrico”, ossia basata sui punti medi dei
segmenti congiungenti i nodi; a destra la suddivisione si appoggia al baricentro e
ai punti di Gauss dei lati di cella.
Per ogni porzione si calcola il flusso di calore Q(An,i )c in transito, nella cella di appartenenza c tra il vertice n e il nodi di cella adiacente j ; ciascuno
di questi flussi sarà espresso in relazione alle temperature nodali della cella in cui l’elemento di superficie in oggetto è contenuto. Conclusa questa
operazione per tutti gli elementi di superficie del poliedro duale è possibile
scrivere l’equazione di bilancio per il nodo in esame:
X X
Qcn,j = φn
(3.32)
c∈I(n) ij
essendo φn il calore generato all’interno della cella duale associata ad n.
• analizzando una cella primale alla volta, calcolare i flussi di calore attraverso le superfici duali contenute nella cella. Componendo le equazioni (3.26),
(3.27) e (3.31) vengono determinati i termini di flusso delle porzioni di celle
tributarie associate ai nodi di cella. Questi flussi sono scritti in funzione dei
valori delle temperature della cella esaminata.
Con entrambe le strade si arriva alla scrittura del sistema lineare che definisce la soluzione del problema (le temperature nodali); con la prima procedura la
matrice fondamentale del sistema risolvente viene scritta riga a riga, calcolando
gli elementi non nulli corrispondenti ai nodi delle celle che condividono il nodo
n in esame: i flussi di calore che lasciano il nodo n nella cella c sono espressi in
termini dei valori delle temperature associate a tutti i nodi della cella, e vengono
55
3 – Formulazione quadratica con il Metodo delle Celle
considerati i soli flussi che attraversano le superfici di confine fra la porzione di
cella associata al nodo e il resto della cella. Con la seconda strada si costruisce
invece un sistema lineare locale che mette in relazione per ogni cella c esaminata
le temperature nodali con i valori di calore generato/assorbito dalla porzione di
cella associata ad ogni suo nodo:
kc Tc = Qc
(3.33)
questo sistema deve essere “assemblato” opportunamente sommando i termini
nelle righe (e per la matrice k anche nelle colonne) del sistema risolvente globale
di indice corrispondente ai numeri che identificano ogni nodo in una numerazione globale.
Un’ultima considerazione riguarda i segni dei flussi di calore attraverso le superfici: essi sono strettamente correlati all’orientazione (esterna) assunta per tali
elementi di superficie. Va qui ricordato (fatto non solo formale bensì sostanziale
per l’implementazione del Metodo) che si deve provvedere ad orientare internamente gli elementi del complesso di celle primale poiché questa orientazione
indurrà automaticamente e in modo non equivoco l’orientazione (esterna) degli
elementi corrispondenti del complesso di celle duale.
3.1.2 Test di convergenza
Per realizzare un test di convergenza della soluzione numerica ottenibile con simplessi nello spazio con interpolazione quadratica è stata considerata l’equazione
di Laplace ∆T (x,y,z) = 0 e due funzioni di riferimento, adottate come test per la
stima dell’accuratezza della soluzione:
T1 (x,y,z) = ex sin y + ey sin z + ez sin x;
(3.34)
T2 (x,y,z) = ez (cos x + cos y + sin x + sin y)
(3.35)
e
Come dominio di studio è stato considerato un cubo di lato unitario centrato nell’origine del sistema di riferimento cartesiano e con le facce ortogonali agli
assi del riferimento. Il dominio è stato suddiviso in tetraedri a 10 nodi creando
dapprima una suddivisione in cubi ognuno dei quali è stato suddiviso, in modo
regolare, in tetraedri. Con questa strategia il lato dei cubi di appoggio ottenuti
con la prima suddivisione del dominio fornisce una dimensione lineare caratteristica associata alla mesh finale di tetraedri.
Come parametro di errore è stato adottato il valore dello scarto quadratico
medio tra valori della soluzione analitica e valori della soluzione numerica ai nodi della mesh.
56
3.1 – Problemi scalari tridimensionali
Figura 3.4. Esempio di mesh regolare di tetraedri a 10 nodi ottenuta a partire da
una suddivisione regolare della geometria
La tabella (3.1) riporta i valori dello scarto quadratico medio ottenuti con le due
funzioni di test per le varie dimensioni caratteristiche del complesso di celle
utilizzato (loto di cella). Gli stessi valori sono illustrati in figura (3.5).
lato cella
0.3333
0.2500
0.2000
0.1667
0.1429
0.1250
0.1111
0.1000
errore medio CM
T1
T2
5.60E-005
1.63E-005
7.99E-006
3.11E-006
1.74E-006
1.40E-006
8.42E-007
4.68E-007
1.57E-004
5.15E-005
1.48E-005
7.92E-006
4.36E-006
3.80E-006
1.56E-006
1.14E-006
Tabella 3.1. Valori dello scarto quadratico medio tra soluzione numerica
prodotta dal CM e soluzione teorica al variare del lato di cella della mesh
per le due funzioni di test
57
3 – Formulazione quadratica con il Metodo delle Celle
Figura 3.5. Analisi di convergenza: rappresentazione in scala logaritmica dello scarto quadratico medio per le funzioni di test ((3.34) in blu e (3.35) in rosso)
rispetto alla dimensione rappresentativa del lato di cella
Gli stessi test, utilizzando lo stesso insieme di tetraedri e con le stesse condizioni al contorno sono stati replicati con il software commerciale Ansys, utilizzante il Metodo degli Elementi Finiti con tetraedri ad interpolazione quadratica. La tabella (3.2) riporta i valori dello scarto quadratico medio ottenuti con le
due funzioni di test per le varie dimensioni caratteristiche del complesso di celle
utilizzato (loto di cella). Gli stessi valori sono illustrati in figura (3.6).
3.2 Problemi di elasticità lineare tridimensionali
In questo paragrafo l’implementazione del Metodo delle Celle con interpolazione
quadratica in domini tridimensionali verrà estesa al problema dello studio delle
deformazioni dei corpi elastici in regime di piccoli spostamenti.
L’illustrazione dell’implementazione verrà completata con un test di accuratezza nel cogliere il campo di spostamenti in un problema di controllo del quale
si dispone di una soluzione teorica in forma chiusa; i risultati ottenuti vengono
comparati con gli analoghi risultati ottenuti nella soluzione del medesimo problema, con la stessa discertizzazione geometrica e lo stesso ordine di interpolazione,
da un codice commerciale basato sul Metodo degli Elementi Finiti.
58
3.2 – Problemi di elasticità lineare tridimensionali
Figura 3.6. Analisi dell’ordine di convergenza del FEM: grafico in scala logaritmica dello scarto quadratico medio (ε) rispetto alla dimensione caratteristica di
cella (d) per le funzioni di test.
lato cella
0.3333
0.2500
0.2000
0.1667
0.1429
0.1250
0.1111
0.1000
errore medio FEM
T1
T2
4.16E-005
1.40E-005
5.89E-006
2.72E-006
1.51E-006
1.07E-006
5.94E-007
4.20E-007
1.28E-004
4.25E-005
1.43E-005
7.89E-006
4.34E-006
2.99E-006
1.50E-006
1.16E-006
Tabella 3.2. Valori dello scarto quadratico medio tra soluzione numerica
prodotta dal FEM e soluzione teorica al variare del lato di cella della mesh
per le due funzioni di test
3.2.1 Interpolazione quadratica del campo degli spostamenti
Ciascuna delle tre componenti dello spostamento rispetto ad un riferimento cartesiano globale viene approssimata, all’interno di ogni cella, con il polinomio di
secondo grado:
ui (x,y,z) = ai + bi x + ci y + di z + ei xy + fi yz + gi zx + hi x2 + ii y 2 + li z 2
59
(3.36)
3 – Formulazione quadratica con il Metodo delle Celle
essendo ui la componente del vettore spostamento in un punto P (x,,y,z) secondo
l’i − esimo asse del riferimento globale.
Adottando il sistema di riferimento locale di coordinate affini di cella introdotto
nel paragrafo 3.1.1.1, varrà l’espressione:
ui (ξ,η,ζ) =
©
1 ξ η ζ ξη ηζ ζξ ξ 2 η 2
ai
b
i
c
i
d
i
ª
e
i
2
ζ
fi
gi
h
i
i
i
li c
(3.37)
dove il vettore dei coefficienti viene determinato imponendo che la funzione
approssimante colga i valori nodali:
ai c = C−1 ui c .
(3.38)
essendo:
• ai c il vettore dei coefficienti del polinomio interpolante il campo della componente ui dello spostmento all’interno della celle c;
• C la matrice definita nella 3.20
• ui c il vettore delle i-esime componenti di spostamento nodale per i nodi
(ordinati) della cella c.
Con il processo già illustrato per il campo scalare, si perverrà pertanto, per ciascuna componente di spostamento, alle espressioni:
©
ª
1 ξ η ζξη ηζ ζξ ξ 2 η 2 ζ 2 C−1 uc
©
ª
v (ξ,η,ζ) = 1 ξ η ζξη ηζ ζξ ξ 2 η 2 ζ 2 C−1 vc
©
ª
w (ξ,η,ζ) = 1 ξ η ζξη ηζ ζξ ξ 2 η 2 ζ 2 C−1 wc .
u (ξ,η,ζ) =
(3.39)
che descrivono completamente la stima del vettore spostamento u (P) in un punto P all’interno della cella c.
60
3.2 – Problemi di elasticità lineare tridimensionali
Raccogliendo le componenti di spostamento di tutti i nodi di cella nel vettore:
uh
vh
w
h
u
i
v
i
w
i
uj
vj
uc =
(3.40)
wj
. . .
.
.
.
.
.
.
u
q
vq
wq
le espressioni riportate nella 3.39 possono venire sinteticamente indicate come:
u (P ) = B (ξ,η,ζ) M−1 uc
dove, essendo I una matrice identità 3x3, si é inteso indicare:
I
0
0
0
0
0
0
0
0
0
I
I
0
0
0
0
0
I
0
0
I
0
I
0
0
0
0
0
I
0
I
0
0
I
0
0
0
0
0
I
I 1/2I
0
0
0
0
0
1/4I
0
0
M =
I 1/2I 1/2I
0
1/4I
0
0
1/4I 1/4I
0
I
0
1/2I
0
0
0
0
0
1/4I
0
I
0
0
1/2I
0
0
0
0
0
1/4I
I 1/2I
0
1/4I
0
0
1/4I 1/4I
0
1/4I
I
0
1/2I 1/2I
0
1/4I
0
0
1/4I 1/4I
e
£
¤
B (ξ,η,ζ) = I Iξ Iη Iζ Iξη Iηζ Iζξ Iξ 2 Iη 2 Iζ 2
(3.41)
(3.42)
(3.43)
3.2.2 Spostamenti - deformazioni
3.2.2.1 Notazione vettoriale
Lo stato deformativo in una porzione di solido è completamente descritto da 6
parametri: tre di dilatazione ε secondo gli assi di riferimento, e tre di scorrimento
61
3 – Formulazione quadratica con il Metodo delle Celle
γ fra coppie di questi assi.
Questi sei parametri sono generalmente
deformazione
εxx
E = εyx
εzx
raccolti in una matrice detta tensore di
εxy εxz
εyy εyx
εzy εzz
(3.44)
Questo tensore è strettamente legato al campo degli spostamenti: pi precisamente
esso corrisponde alla parte simmetrica della matrice gradiente degli spostamenti
∇({u}):
∂u
εxx =
∂x
∂v
εyy =
∂y
∂w
εzz =
∂z
(3.45)
µ
¶
∂u
1
∂v
γ
xy
εxy = εyx =
+
=
2 µ ∂y ∂x ¶
2
1 ∂u ∂w
γyz
²xz = εzx =
+
=
2 µ ∂z
∂x ¶
2
1
∂v
∂w
γ
zx
+
=
²yz = εzy =
2 ∂z
∂y
2
Di fatto si suole esprimere la matrice E mediante il vettore
εx
εy
εz
² =
γxy
γ
yz
γzx
(3.46)
che riporta tutte le 6 componenti significative del tensore rappresentato. Oltre
ad essere questa una notazione comoda, essa è soprattutto utile ai fini dell’implementazione di un programma di calcolo efficiente. In più, nel caso di comportamento elastico lineare del materiale, essa permette di esprimere il legame
costitutivo con una semplice matrice di dimensione 6x6 anziché con un tensore a
quattro indici Chkrs .
62
3.2 – Problemi di elasticità lineare tridimensionali
3.2.2.2 Gradiente degli spostamenti
Il gradiente degli spostamenti viene espresso dalla matrice
∂u
∂u
∂y
∂v
∂y
∂w
∂y
∂x
∂v
Q =
∂x
∂w
∂x
∂u
∂z
∂v
.
∂z
∂w
(3.47)
∂z
Indicando con ui la generica componente del vettore spostamento u, e con ei la
variabile di derivazione, si ha evidentemente:
∂ui
∂ui ∂ξ
∂ui ∂η
∂ui ∂ζ
=
+
+
.
∂ei
∂ξ ∂ei
∂η ∂ei
∂ζ ∂ei
Si ha pertanto:
∂u
∂ξ
∂v
Q =
∂ξ
∂w
∂ξ
∂u
∂η
∂v
∂η
∂w
∂η
∂u ∂ξ
∂ζ ∂x
∂v
∂η
∂ζ
∂x
∂w ∂ζ
∂ζ
∂x
∂ξ
∂y
∂η
∂y
∂ζ
∂z
∂ξ
∂z
∂η
.
∂z
∂ζ
∂z
(3.48)
(3.49)
Va rilevato subito che la seconda matrice altro non è che la matrice trasposta dell’inversa della matrice Jc che appare nell’equazione (3.3).
Analizzando invece la prima matrice, appare evidente la scrittura:
·
Q =
¸
∂u (ξ,ηζ) ∂u (ξ,ηζ) ∂u (ξ,ηζ)
−1
(JTc )
,
,
∂ξ
∂η
∂ζ
(3.50)
che, ricordando la relazione (3.41), autorizza la scrittura:
·
¸
∂B (ξ η ζ) −1
∂B (ξ η ζ) −1
∂B (ξ η ζ) −1
−1
Q =
(3.51)
M uc ,
M uc ,
M uc (JTc )
∂ξ
∂η
∂ζ
Questa espressione consente di calcolare i valori degli elementi del tensore di
deformazione ² in un punto di coordinate note all’interno della cella4 c;
——————————————————————————————
4
si noti come l solo termine dipendente dalla cella sia proprio la matrice Jc legata alla specifica
disposizione spaziale dei vertici di cella
63
3 – Formulazione quadratica con il Metodo delle Celle
3.2.3 Legame sforzi - deformazioni
Lo stato di tensione in un punto è completamente descritto dalla matrice
σxx σxy σxz
Σ = σyx σyy σyz
σzx σzy σzz
(3.52)
detta tensore degli sforzi. La simmetria di questo tensore consente, come per il
caso del tensore delle deformazioni, di poter adottare la notazione vettoriale che
ne riporta le sei sole componenti significative:
σxx
σ
yy
σzz
σ =
(3.53)
σxy
σyz
σzx
Il legame che correla il tensore degli sforzi σ a quello delle deformazioni ² descrive come il materiale si deforma per effetto delle sollecitazioni, comportamento
macroscopico strettamente legato alla costituzione interna del materiale (tipo di
legami chimici presenti, tipo di struttura molecolare, ...). Si parla a tale proposito
di legame costitutivo.
Per un materiale che abbia comportamento elastico lineare ha:
σ = D ².
(3.54)
Adottando per tensioni σ e deformazioni ² la notazione vettoriale, la (3.54) assume la forma generale:
²x
d
d
d
d
d
d
σ
1,1
1,2
1,3
1,4
1,5
1,6
x
²y
σy
d2,1 d2,2 d2,3 d2,4 d2,5 d2,6
²
d
d
d
d
d
d
σz
z
3,1
3,2
3,3
3,4
3,5
3,6
(3.55)
=
γxy
τxy
d4,1 d4,2 d4,3 d4,4 d4,5 d4,6
d5,1 d5,2 d5,3 d5,4 d5,5 d5,6
γ
τ
yz
yz
γzx
d6,1 d6,2 d6,3 d6,4 d6,5 d6,6
τzx
Per un materiale a comportamento elastico lineare e isotropo la matrice D assume
la forma:
1−ν
1
1
0
0
0
ν
1 1−ν 1
0
0
0
ν
1−ν
1
E
0
0
0
1
ν
D =
(3.56)
1−2ν
0
0
0
0
(1 + ν)(1 − 2ν)
2ν
0
1−2ν
0
0
0
0
0
2ν
1−2ν
0
0
0
0
0
2ν
64
3.2 – Problemi di elasticità lineare tridimensionali
dove E e ν sono rispettivamente il modulo di elasticità del materiale ed il suo
coefficiente di contrazione trasversale altrimenti detto modulo di Poisson.
——————————————————————————————
3.2.4 Legame forze - sforzi
In una regione caratterizzata da sforzo uniforme, la forza di superficie che agisce
su una superficie piana A descritta dal vettore area a = (ax ,ay ,az ) viene espressa
dalla nota relazione di Cauchy, che, in forma discreta, è esprimibile come:
σxx σxy σxz ax
Tx
Ty = σyx σyy σyz ay
(3.57)
Tz
σzx σzy σzz
az
ossia, in notazione sintetica
T = Σa
(3.58)
Adottando per σ la notazione vettoriale si ha, in modo del tutto equivalente
σx
σy
ax 0 0 ay 0 az
Tx
σz
Ty = 0 ay 0 ax az 0
(3.59)
τxy
Tz
0 0 az 0 ay ax
τyz
τzx
Nel caso trattato, all’interno di ciascuna cella il campo delle tensioni risulta essere
funzione lineare delle coordinate. In questo caso, come noto, si ha la notevole
proprietà:
Z
T =
Σ(x,y,z) · ndA = Σ(xG ,yG ,zG )a
(3.60)
A
prodotto fra la matrice Σ calcolata nel baricentro G = (xG ,yG ,zG ) della superficie
A, per il vettore area a della superficie stessa.
Usando la notazione vettoriale per il tensore degli sforzi si può scrivere dunque:
σx
σ
y
ax 0 0 ay 0 az
Tx
σ
z
Ty = 0 ay 0 ax az 0
(3.61)
τxy
Tz
0 0 az 0 ay ax
τyz
τzx G
ove si è inteso adottare il pedice G per indicare che le componenti del vettore σ
sono calcolate nel baricentro G della superficie A.
65
3 – Formulazione quadratica con il Metodo delle Celle
3.2.5 L’equazione fondamentale: il bilancio delle forze
L’equazione fondamentale dell’elastostatica lega direttamente le forze esterne con
gli spostamenti ai nodi delle celle. Si ottiene componendo opportunamente le
relazioni sopra descritte:
{u}c → {²} → {σ} → {T }
(3.62)
Per ottenere la relazione fra forze e spostamenti ai nodi di una generica cella c si scrive un semplice bilancio delle forze pertinenti a ciascun nodo. Questo
bilancio viene scritto relativamente alle celle del complesso duale, ovvero a quelle regioni del dominio che la divisione in celle primali associa naturalmente ad
ogni nodo; queste regioni possono essere viste come le porzioni di dominio di
competenza di ogni nodo. Le celle duali costituiscono delle “regioni tributarie”
dei nodi del sistema primale, poiché è relativamente ad esse che il bilancio delle
forze viene scritto, contemplando tutte le forze da esse “raccolte”.
Di seguito si descrive il bilancio dalla prospettiva della generica cella primale.
Nella creazione del complesso duale, ogni cella primale viene ad essere divisa in
10 parti, una per ogni nodo. Ogni parte è di fatto l’intersezione fra la cella (primale) in esame e le celle duali associate ai suoi nodi. Ogni parte rappresenta così
la regione tributaria di ogni nodo nella cella considerata.
Per scrivere, ad esempio, il bilancio delle forze agenti sul nodo h si considerano
dunque le forze agenti sulla sua regione tributaria. Le forze agenti sono:
~ c , nella porzione raccolta
• le forze di volume (tipicamente la forza peso) B
h
dal volume di cella associato al nodo (ossia la parte di cella duale del nodo
h che cade nella cella c in esame);
c
• le forze di superficie T~h,n
che agiscono sulle superfici di confine fra la regione tributaria del nodo h e le regioni tributarie dei tre nodi adiacenti; nel
caso del nodo h, per la convenziona adottata sulla denominazione locale dei
nodi, i nodi adiacenti sono i nodi l, m e n;
• le forze concentrate F~h eventualmente applicate direttamente al nodo h o
che cadono all’interno della sua regione tributaria: si noti che per quanto
concentrata possa essere l’applicazione di una forza, essa agisce comunque
su una regione che, per quanto piccola, resta pur sempre di estensione finita:
il concetto di forza concentrata in un punto, che dal punto di vista fisico
è una pura astrazione logica, resta tale anche nell’approccio numerico del
Metodo delle Celle che attribuisce a buon diritto le forze concentrate alla
cella duale in cui esse ricadono.
Le forze di volume sono note quando sia noto il volume della regione tributaria
e le proprietà (la massa volumica nel caso della forza peso) del materiale di cella.
66
3.2 – Problemi di elasticità lineare tridimensionali
Le forze di superficie sono anch’esse note quando sia nota la geometria e l’orientazione della superficie σc (x,y,z) ovvero σc (ξ,η,ζ) nella cella c in esame, da stimare
nel baricentro della sueprficie. Dalla (3.60) si ha infatti
c
T~h,i
= σc (G)AM
c
T~h,k
= σc (G)AR
T~ c = σc (G)AS
(3.63)
h,l
La notazione σc (G) suggerisce che σc sia calcolato nel baricentro della superficie
AP .
Il bilancio delle forze sulla porzione di cella duale del nodo h contenuta nella
cella c viene allora scritto nella forma:
´
X ³
~ c + T~ c + T~ c + T~ c
= 0
(3.64)
B
h,l
h,k
h
h,i
c∈=(h)
essendo =(h) l’insieme delle celle che insistono sul nodo h, ossia quelle che hanno
h tra i vertici di cella. Le forze T~i,j possono essere espresse in funzione del vettore
degli spostamenti nodali uc componendo opportunamente le espressioni (3.41),
(3.45), (3.61) e (3.55). Scrivendo il bilancio su tutte le porzioni di cella duale della
cella primale c si ottiene un’espressione del tipo:
Fc − k uc = 0
(3.65)
Fc = k uc
(3.66)
ossia, in modo più usuale
dove Fc riassume i termini delle forze di volume e delle forze applicate direttamente ai nodi.
Il sistema (3.66) prende il nome di sistema fondamentale e la matrice kc è detta
matrice di rigidezza locale e, per la cella a 10 nodi, ha dimensioni 30 x 30.
Scrivendo il bilancio su tutte le N celle che descrivono la geometria in esame si
ottengono altrettanti sistemi del tipo dell’equazione (3.66) che, opportunamente
“assemblati” portano alla scrittura del sistema globale:
F = KU
dove:
• F il vettore delle forze applicate a tutti gli N nodi del sistema:
F = {F1,x ,F1,y ,F1,z , . . . ,FN,x ,FN,y ,FN,z }T
67
(3.67)
3 – Formulazione quadratica con il Metodo delle Celle
• K una matrice di dimensioni 3N x3N ed è detta matrice di rigidezza globale;
• U il vettore degli spostamenti nodali
U = {u1 ,v1 ,w1 , . . . ,uN ,vN ,wN }T .
3.2.5.1 Orientazione delle porzioni di superficie duale
Nel calcolo delle forze che agiscono sulla superficie di confine delle regioni tributarie di ciascun nodo è fondamentale che, cella per cella, venga assunta un’unica
orientazione valida per entrambi i nodi separati da ogni porzione di superficie.
Questa orientazione dà infatti il “segno della forza” ottenuta dal prodotto fra il
tensore degli sforzi e il vettore area.
L’orientazione in questione è un’orientazione esterna di un elemento (la superficie) che fa parte del complesso duale. Come tale, essa viene naturalmente indotta
quando sia stata assunta un’orientazione interna per gli elementi del complesso
primale. Provvedere ad una convenzionale orientazione interna degli elementi
del complesso primale è quindi operazione non formale bensì sostanziale per la
costruzione dell’equazione di bilancio corretta, priva di ambiguità e di errori.
3.2.6 Test numerico
La precisione della soluzione numerica ottenibile con l’implementazione CM proposta è stata valutata risolvendo un problema di test, per il quale è disponibile in
letteratura una soluzione in forma chiusa.
Il problema trattato è quello della sfera cava pressurizzata di grosso spessore (paragonabile al diametro interno della cavità), di materiale omogeneo e isotropo e a
comportamento elastico lineare, in regime di piccoli spostamenti. La figura (3.7)
riporta lo schema di riferimento: in queste condizioni il problema ha simmetria
sferica e il campo di spostamenti risulta radiale rispetto al centro della sfera ed è
definito dalla relazione5 :
·
¸
P a3
b3
u (r) =
(1 − 2ν) r + (1 + ν) 2
(3.68)
E (b3 − a3 )
2r
essendo a e b i diametri interno ed esterno della sfera, rispettivamente, P il valore della pressione interna, E e ν il modulo elastico e il modulo di Poisson del
materiale, r la distanza dal centro della sfera.
Il problema replicato è completamente descritto dai valori riportati nella tabella di figura (3.7).
5
[31] cap. 7
68
3.2 – Problemi di elasticità lineare tridimensionali
parametro valore unità di misura
a
1
m
b
2
m
E
200
GP a
ν
0.26
m
P
10
m
Figura 3.7.
Sfera cava pressurizzata: schema del problema e notazioni di riferimento
Beneficiando della simmetria sferica del problema, si è considerata solamente una
porzione della geometria corrispondente ad un suo ottavo, ottenuto sezionando
la sfera con i piani coordinati come illustrato in figura (3.8)
Per replicare le condizioni cinematiche del problema originario, sui punti delle superfici di taglio si sono eliminati gli spostamenti ortogonali alla superficie
stessa, consentendo solamente spostamenti nel piano della sezione; per i punti
appartenenti agli spigoli radiali, gli spostamenti vincolati saranno pertanto risultati dall’unione dei vincoli imposti sulle superfici concorrenti.
Questa geometria è stata discretizzata con elementi tetraedrici a 10 nodi, ottenendo 3 differenti mesh a differente dimensione caratteristica l, ottenuta come
rapporto tra la lunghezza di uno spigolo radiale e il numero di divisioni su di
esso impostate6 . La figura (3.9) illustra una delle discretizzazioni utilizzate nell’analisi.
Lo stesso complesso di elementi è stato utilizzato per risolvere lo stesso problema
con il programma Ansys, codice commerciale general purpose per la soluzione
numerica di problemi ingegneristici basato sul FEM.
Per ciascuna delle discretizzazioni si è valutato in ogni nodo non vincolato
, confrontandolo con il valore teorico
il valore dello spostamento radiale unum
i
6
la regolarità della geometria e l’attitudine della tassellizzazione di Delaunay alla base del
discretizzatore a campire una geometria di questo genere, hanno fatto sí che le mesh fossero regolari e di buona qualità; in queste condizioni la misura ottenuta dal rapporto tra dimensione dello
spigolo radiale e numero di divisioni è una misura lineare significativa della mesh.
69
3 – Formulazione quadratica con il Metodo delle Celle
Figura 3.8. Sfera cava pressurizzata: geometria in esame
Figura 3.9. Sfera cava pressurizzata: esempio di mesh
uti previsto dalla formula (3.68). Come parametro di precisione della soluzione numerica si è considerato lo scarto quadratico medio rispetto alla soluzione
teorica:
s
PNi
2
num
− uti )
i=1 (ui
(3.69)
δ =
Ni
essendo Ni il numero dei nodi non vincolati. La tabella di figura (3.10) riporta
i valori di δ ottenuti con il codice CM e con l’analisi FEM accoppiata, per vari
valori della dimensione lineare caratteristica della mesh l. I medesimi valori sono
riportati in scala logaritmica nel grafico di figura (3.11) dove si evince, oltre alla
piena concordanza dei risultati ottenuti dai due metodi e alla loro precisione nel
predire i valori teorici di spostamento, anche la stretta corrispondenza in termini
di ordine di convergenza sussistente tra CM e FEM.
70
3.2 – Problemi di elasticità lineare tridimensionali
lato
1
0.5
0.25
0.125
errore medio δ
CM
FEM
0.0182709 0.0182706
0.0113420 0.0115367
0.0031108 0.0031523
0.0008425 0.0008515
Figura 3.10. Sfera cava pressurizzata: rappresentazione del campo di
spostamenti e valori dell’errore quadratico medio rispetto al lato della
mesh per CM e FEM
Figura 3.11.
Sfera cava pressurizzata: grafico errore δ - lato l in scala logaritmica
71
3 – Formulazione quadratica con il Metodo delle Celle
72
Capitolo 4
L’approccio meshless con il Metodo
delle Celle
In questo capitolo vengono formulate alcune ipotesi di approccio meshless del
CM sia epr i problemi scalari che per problemi di elasticità lineare in domini bidimensionali.
La prima parte del capitolo è dedicata ad una breve introduzione sui metodi meshless in ambito differenziale, conclusa da una digressione sulle applicazioni nello specifico ambito della biomeccanica. I caratteri generali di un approccio meshless, reso accessibile in modo diretto dalla struttura concettuale del CM, vengono poi declinati nello specifico di tre approcci proposti: il primo basato sulla
creazione di un complesso locale di celle primali, gli altri due basati su un’interpolazione della funzione incognita definita localmente su una costellazione di
punti a connettività non definita.
4.1 La filosofia dei metodi meshless
Il Metodo degli Elementi Finiti (FEM) si è ormai affermato come il principale e
più diffuso strumento di analisi numerica per soluzione di una vastità di problemi scientifici e tecnico–ingegneristici un tempo inaffrontabili. Esistono oggi
numerosi codici commerciali che integrano formulazioni FEM per la soluzione
di problemi complessi in cui intervengano problemi afferenti a distinti problemi
fisici.
Pur evoluto talmente da consentire analisi molto raffinate e complesse, il FEM
non è privo di limiti che, in taluni ambiti, fanno sì che si siano cercate strade
alternative o parallele a maggiore flessibilità o di minor onere computazionale.
Una delle fasi più onerose di una analisi FEM è la discretizzazione delle geometrie in elementi con la creazione della cosiddetta mesh: dividere una geometria in
73
4 – L’approccio meshless con il Metodo delle Celle
elementi contigui, riproducendone le caratteristiche geometriche con sufficiente
approssimazione e disponendo di elementi regolari è infatti un problema tutt’altro che banale; specie relativamente ai casi tridimensionali l’operazione ha un
esito non sempre garantito e spesso risulta essere un punto critico ai fini della precisione dei calcoli effettuati. La generazione della mesh è una operazione
spesso computazionalmente onerosa e dispendiosa in termini di tempo, fatto che
assume rilievo in tutti quei problemi (dalla fluidodinamica a superficie libera ai
fenomeni di frattura, dalle grandi deformazioni alle interazioni fluido-struttura)
in cui il fenomeno studiato comporta una variazione della geometria, obbligando
ad ogni passo dell’analisi alla rigenerazione della mesh sulla geometria aggiornata.
Con il tentativo di superare questi limiti a partire dalla fine degli anni ’70 iniziò
a svilupparsi un approccio differente che, costruendo le interpolazioni basandosi
unicamente sui nodi, non rendesse necessaria la generazione di elementi; questa
nuova categoria di metodi assunse il nome di “meshless” (talvolta denominati
anche “meshfree”).
Il primo metodo meshless sviluppato ha nome Smoothed Particle Hydrodynamics
(SPH): sviluppato nel 1977 in ambito astrofisico da Lucy [32], Monaghan e Gingold [33], fu poi applicato a problemi di fluidodinamica e di meccanica dei solidi
(problemi di impatto). Dall’epoca, numerosi furono i metodi sviluppati ascrivibili alla categoria dei metodi meshless; citando i più noti, e probabilmente
tralasciandone in questa arbitraria selezione alcuni:
• Smoothed Particle Hydrodynamics (SPH) [32], [33]
• Non Structured Finite Differences (NSFD) [34]
• Diffuse Element Method (DEM) [35]
• Element-Free Galerkin Method (EFG o EFGM) [36]
• Reproducing Kernel Particle method (RKPM) [37]
• partition of Unit (PUFEM) [38]
• Finite Point Method (FPM) [39]
• hp-Clouds [40]
• Natural Element Method (NEM) [41]
• Meshless Local Petrov Galerkin (MLPG) [42]
• Generalized Finite Element Method (GFEM) [43]
74
4.1 – La filosofia dei metodi meshless
• Meshless Finite Element Method (MFEM) [44]
• Extended Finite Element Method (XFEM) [45]
Tutti questi metodi condividono il fatto di discretizzare il dominio in esame solamente a livello di punti (nodi) posizionati dentro la geometria e sul suo contorno, come suggerito dalla figura (4.1). L’approssimazione di una funzione scalare
avviene tramite una relazione del tipo:
X
u (x,t) =
ΦI (x) uI (t)
(4.1)
I∈S
essendo, con riferimento alle notazioni di figura (4.1):
• uI il valore al nodo I di posizione xI
• ΦI : Ω → < la funzione di forma associate al nodo I: solitamente si tratta
di una funzione non nulle solo entro una regione di influenza del nodo ΩI
definita da un valore dI detto supporto del nodo I;
• S è l’insieme dei nodi per i quali la funzione di forma ΦI (x) è non nulla
L’espressione formale è dunque analoga a quella nota per gli Elementi Finiti, con
la differenza che ora le funzioni dell’equazione (4.1) sono approssimanti e non già
interpolanti, verificandosiuI =
/ (xI ). Questo fatto ha, come di seguito specificato,
un’importante ricaduta nell’imposizione delle condizioni al contorno di tipo essenziale.
I vari metodi differiscono tra loro essenzialmente per:
• il tipo di approssimazione che viene effettuata: si distinguono a tale proposito i metodi intrinsechi (SPH, MLS) dai metodi detti estrinsechi (PUFEM,
hp-clouds);
• il tipo di integrazione della forma differenziale: in particolare alcuni metodi
utilizzano la forma “forte” avvalendosi del metodo di collocazione per la
costruzione del sistema lineare risolvente; altri usano invece il metodo di
Galerkin integrando la forma debole;
In particolare, tra le formulazioni meshless che usano il metodo di Galerkin, la
discretizzazione della forma differenziale può avvenire o usando dei punti di integrazione in cui le funzioni sono valutate (cosiddetti stress points) oppure ricorrendo alla cosiddetta background mesh o cell structure, un set di celle di integrazione
ove viene utilizzato il metodo della quadratura di Gauss.
75
4 – L’approccio meshless con il Metodo delle Celle
Sebbene l’assenza della mesh rappresenti, oltre che ragione di novità, anche
motivo di attrattiva verso questi metodi, va ciononostante rilevato come essi non
si siano ancora affermati nella pratica corrente: pochi sono i codici commerciali
che implementano algoritmi meshless e molti metodi sono ancora in fase di sviluppo con applicazioni sperimentale in casi tecnologici la cui coplessità giustifichi
lo sforzo di una consistente indagine teorica e speculativa.
La maggior parte dei metodi meshless sinora sviluppati accusa infatti alcuni punti critici:
• difficoltà nell’imporre le condizioni al contorno di tipo essenziale: il carattere non interpolatorio delle funzioni di forma rendono impossibile l’imposizione diretta di questo tipo di condizioni al contorno per cui si deve ricorrere a tecniche dedicate; le tecniche più diffuse sono la tecnica dei moltiplicatori di Lagrange e i penalty methods, ma va sottolineato come il tema sia
ancora oggetto di indagine e di sviluppo teorico e come altre altre elaborate
tecniche siano attingibili dalla letteratura [46];
• il calcolo delle derivate risulta per alcuni algoritmi significativamente laborioso;
• per i metodi che usano i punti di Gauss per integrare la formulazione forte della forma differenziale, il numero di punti richiesto è in alcuni casi
elevato;
• le funzioni di forma hanno spesso continuità maggiore di C 0 con riduzione
Figura 4.1.
Discretizzazione con approccio meshless: nodi e domini di influenza (ΩJ )
76
4.1 – La filosofia dei metodi meshless
dell’ordine di convergenza e con ostacoli nel considerare discontinuità nelle
proprietà materiali;
• alcuni metodi non funzionano con distribuzioni arbitrarie di punti (necessitando di griglie regolari) o richiedono specifici requisiti nella connettività
locale tra i punti per ottenere risultati precisi;
L’aspetto dell’onere computazionale nella definizione delle connettività locali
è da taluni autori posto in particolare evidenza anche sotto lo specifico profilo “tassonomico” della classificazione di un metodo come “meshless”: se da un
lato l’idea centrale dell’assenza di mesh è uno degli elementi comunemente ritenuti focali, Idelsohn [44] afferma che «un metodo meshless è un algoritmo in cui la
definizione delle funzioni di forma dipende solamente dalla posizione dei nodi»; ciononostante l’esigenza di una rapida definizione della connettività locale tra i nodi
viene ritenuta un elemento imprescindibile, tanto che Idelsohn et alii ([47] e [48])
affermano:
Un metodo meshless è un algoritmo in cui:
1. la definizione delle funzioni di forma dipende solamente dalla posizione dei nodi;
2. la valutazione della connettività locale ha complessità computazionale lineare rispetto al numero dei nodi.
Questi requisiti giustificano quanti1 affermano che in realtà, sotto il profilo
della efficienza nella definizione della connettività, non tutti i metodi siano realmente meshless.
Lo sviluppo degli algoritmi è comunque ancora in corso, e come alle origini i
limiti del FEM, oggi sono le difficoltà e le limitazioni degli algoritmi meshless
“storici” ad essere l’ostacolo che le nuove formulazioni si impegnano a superare, come ben evidenziato in [49]. Allo stato attuale gli approcci piìu promettenti
paiono essere rappresentati dai metodi MFEM, XFEM e GFEM.
4.1.1 Utilizzo di approcci meshless in ambito biomeccanico
Nello specifico dell’ambito biomeccanico computazionale l’applicazione di approcci meshless resta tutt’ora limitata a pochi studi malgrado sia gli aspetti morfologici delle geometrie che la complessità dei problemi trattati rendano a priori
interessante il loro utilizzo.
I principali ambiti di applicazione sono la simulazione chirurgica ([50], [51])
e la simulazione del cedimento dei tessuti molli ([52]), ambiti entrambi in cui il
1
cfr. [48]
77
4 – L’approccio meshless con il Metodo delle Celle
FEM risulta inadeguato in caso di grandi deformazioni con la perdita di continuità del dominio.
Lo sforzo tangibile di ricorrere ad approcci meshless per raggiungere simulazioni complesse difficoltosamente approntabili altrimenti, è ravvisabile in molti
lavori riportati in letteratura: Wong et al. [53] presentano ad esempio un ambiente per l’applicazione di approssimazioni definite “element–free” nell’ambito
della cardiologia computazionale in cui viene presentata l’implementazione di
un modello meshless di un modello fisiologico del cuore costruito da immagini
medicali. Il lavoro riporta delle comparazioni con il FEM su geometrie semplificate e dimostra la plausibilità fisiologica di un modello di cuore umano costruito
da immagini di risonanza magnetica.
Chun et al. [54] realizzano un modello MGFD per lo studio della crescita della
placca interna dei vasi sanguigni: il modello, basato su tre immagini di risonanza
magnetica distanziate nel tempo, è bidimensionale e adotta un modello semplificato sia per le proprietà meccaniche del vaso che per il modello di accrescimento
del deposito.
Horton et al. [55] affrontano la simulazione della deformazione di tessuti molli in tempo reale con una formulazione lagrangiana meshless basata sulle differenze centrali con integrazione esplicita per nonlinearità di carattere geometrico;
il focus dell’applicazione è la brain indentation, problema rispetto al quale gli autori illustrano la validazione dell’analisi con misure sperimentali condotte su un
cervello suino.
Sempre nell’ambito dei modelli soft tissue Pena et al. [56] applicano il NEM al
problema delle grandi deformazioni in materiali non isotropi “fibro–rinforzati”:
gli autori illustrano un modello di legamento umano, confrontando i risultati con
quelli ottenuti da una analisi FEM accoppiata.
Nello specifico ambito della biomeccanica dei tessuti ossei l’uso di approcci
meshless è invece molto limitato: solo tre lavori in letteratura riportano l’utilizzo
di algoritmi meshless nella predizione del comportamento meccanico di segmenti ossei. Liew et al. [57], si avvalgono del Reproducing Kernel Particle Method
per analizzare la distribuzione delle deformazioni nella parte prossimale del femore umano in una simulazione dell’effetto dell’invecchiamento e della necrosi
di tessuti: oltre all’interesse costituito dall’essere un primo lavoro che utilizza una
metodologia meshless nello specifico ambito biomeccanico, l’adozione di un modello semplificato bidimensionale e l’adozione di un materiale base omogeneo
costituiscono un significativo limite nella prospettiva delle applicazioni cliniche.
78
4.2 – Meshless a celle locali con il CM
Lo studio di Doblaré et al. [58] esplora invece l’applicazione del NEM in una
relativamente ampia casistica (rimodellamento adattivo del tessuto osseo, comportamento iperelastico dei tendini in regime di grandi deformazioni, modello
poroelastico delle cartilagini articolari) evidenziando i potenziali vantaggi dell’utilizzo del metodo meshless nelle simulazioni biomeccaniche. Ciononostante
manca ancora una applicazione a livello di organo, con un modello tridimensionale di un segmento osseo intero.
Lee et al. [59] applicano una implementazione della Moving Least Square Approximation Technique per analizzare il comportamento meccanico di campioni
cubici di osso trabecolare sottoposti a compressione: con un modello tridimensionale dei campioni sperimentali derivato da immagini µ−CT , il lavoro dimostra le
notevoli potenzialità rappresentate dall’applicazione diretta del metodo meshless
ai dataset di immagini cliniche per la costruzione di modelli numerici.
4.2 Meshless a celle locali con il CM
Come è stato evidenziato, il Metodo delle Celle scrive delle relazioni algebriche
tra variabili (di sorgente o di configurazione che siano) di natura globale.
Gli elementi (geometrici e temporali) di supporto per riferire queste grandezze sono costituiti dalle celle di ordine n dei due complessi primale e duale. Tra
i due complessi di celle sussiste una relazione di dualità che si manifesta nella
corrispondenza biunivoca tra gli elementi corrispondenti.
La chiave di volta dell’approccio può essere vista nella scrittura di un’equazione di bilancio riferita alle celle duali. Le celle duali sono ottenute da una suddivisione arbitraria delle celle primali e costituiscono le regioni tributarie associate ad
ogni “vertice” (o in termini generali 0-cella ) del complesso primale. Sotto questo
profilo, il complesso duale di celle può essere visto come una struttura di supporto del sistema primale volta a collocare le grandezze coinvolte nell’equazione di
bilancio. La stessa equazione di bilancio è associata ad una cella duale; la soluzione di tutte le equazioni di bilancio (associate a tutte le celle del sistema duale)
consente di determinare, in ultima analisi, le variabili di configurazione associate
al sistema primale.
Merita a questo punto sottolineare alcune proprietà immediate delle equazione di bilancio:
• indipendenza rispetto alla forma della regione tributaria di riferimento;
• indipendenza rispetto all’estensione della regione tributaria di riferimento;
79
4 – L’approccio meshless con il Metodo delle Celle
• relativamente ad un sistema in equilibrio, risulterà in equilibrio anche qualunque sua porzione arbitrariamente scelta; questo significa che, relativamente ad un sistema di equilibrio, è possibile scrivere n equazioni di bilancio riferite ad altrettante regioni estratte dal sistema originale: queste
regioni, in particolare, possono sovrapporsi in tutto o in parte senza che la
validità dei bilanci ad esse riferiti ne traggano danno alcuno.
Queste considerazioni riassuntive sul Metodo delle Celle e sui suoi “strumenti” suggeriscono un approccio “locale” alla costruzione della equazione di bilancio. Dal punto di vista del singolo nodo primale preso in esame, sulla cui circostante regione tributaria (cella duale) si sta scrivendo il bilancio, la conoscenza
dei due complessi di celle nella loro globalità è evidentemente superflua: dal
punto di vista del nodo esaminato è infatti sufficiente conoscere la connettività
locale tra questo nodo ed i nodi primali circostanti, connettività che permette di
definire l’insieme delle celle primali che afferiscono al nodo stesso. Definite che
siano (localmente) queste celle, è infatti possibile definire - sempre localmente gli elementi del complesso duale ad esse associati; questo consente in particolare
di definire la cella duale che circonda il nodo considerato, ossia la sua regione
tributaria rispetto a cui esprimere il bilancio di nodo. Questa procedura, in cui
la divisione delle stesse celle primali in porzioni duali avviene più volte per ciascuno dei vertici di cella, è ridondante e computazionalmente non ottimizzata, se
applicata alle celle di un complesso definito, nella sua globalità, a priori. Il processo solitamente seguito è quello di esaminare una cella alla volta, calcolando
porzioni del bilancio di nodo dei suoi vertici; conducendo questa operazione per
tutte le celle primali, si coinvolgono tutte le porzioni di cella duale di competenza
di ciascun nodo, e il loro corretto assemblaggio porta immediatamente alla scrittura del sistema risolvente.
La prospettiva locale nella scrittura dell’equazione di bilancio nodo a nodo
suggerisce un approccio meshless reso immediatamente possibile dal Metodo
delle Celle. Si prenda infatti in esame un generico nodo P interno ad un dominio (bi o tridimensionale) studiato in cui siano stati posizionati un certo numero
di nodi (ad esempio quelli generati da una tradizionale generazione di celle primali); chiameremo convenzionalmente questo nodo preso in esame nodo “polo”.
Attorno a questo nodo, è possibile individuare un certo numero di nodi, scelti,
tra i nodi prossimi, in modo tale da circondare il nodo polo, evitando cioè che i
punti individuati si addensino attorno ad una stessa direzione rispetto al polo.
Chiameremo convenzionalmente questi nodi, “nodi satellite”.
Con questa costellazione dei nodi “satellite”, opportunamente ordinati, è possibile costruire un insieme di celle che:
• condividano tutte il nodo polo;
80
4.2 – Meshless a celle locali con il CM
• siano tra loro adiacenti;
• coprano interamente l’intorno del nodo polo senza lasciare porzioni di dominio “scoperte”.
L’insieme di queste celle costituisce una mesh locale, ovvero un complesso primale locale associato al nodo polo.
Il numero delle celle locali (ossia il numero di nodi satellite), la loro forma e la
loro dimensione, sono elementi di principio arbitrari; il numero di satelliti dipende da un lato dalla necessità di coprire tutta una regione circostante il nodo polo
e dall’altro dall’esigenza di evitare creazione di celle distorte2 .
Zovatto e Nicolini [60] hanno rilevato comunque come l’ordine di convergenza
ottenuto non dipenda dal numero di nodi satellite utilizzati quando questi varino
tra 4 e 8; un numero maggiore di nodi satellite risulta poco conveniente, aumentando la difficoltà nella creazione di celle a forma regolare.
Per ciascuna delle celle del complesso locale si provvede quindi al calcolo delle grandezze coinvolte nel bilancio del vertice corrispondente al nodo polo. La
procedura, cella per cella risulta essere la stessa seguita quando la cella veniva
considerata come parte di un complesso globale.
Con questa procedura, la matrice fondamentale del sistema di equazioni algebriche che permettono di risolvere il campo studiato (ossia il calcolo dei valori delle
sue variabili di configurazione), viene costruita riga per riga; la riga3 elaborata
è quella corrispondente numero associato al nodo polo nella numerazione globale dei nodi posizionati all’interno del sistema studiato; gli elementi non nulli
di questa riga saranno quelli posizionati nelle colonne di indice pari al numero
identificativo dei vari nodi satellite nella numerazione globale.
Non appare del tutto superfluo in questo contesto sottolineare come questo approccio locale comporti la perdita di garanzie circa la simmetria della matrice
fondamentale del sistema risolvente. Nulla assicura infatti il carattere mutuo della relazione polo-satellite: un nodo che figura nella lista dei satelliti di un dato
polo, non necessariamente contemplerà questo polo nella lista dei suoi satelliti.
Non sussiste quindi necessariamente la simmetria di ruoli tra i nodi nella scrittura
2
la geometria delle celle è solitamente espressa da un parametro denominato aspect ratio, definito come il rapporto tra la lunghezza del lato più lungo e quella del lato più corto di una
elemento; celle molto distorte, individuate da elevato valore diaspect ratio, sono caratterizzate da
una matrice di interpolazione mal condizionata: questo fatto, che verrà approfondito nel seguente paragrafo, determina una perdita di accuratezza nell’interpolazione della funzione incognita
e dunque, in ultima analisi, un decadimento dell’accuratezza della soluzione numerica a livello
globale di intero sistema.
3
o le righe nel caso in cui la variabile di configurazione sia di natura vettoriale
81
4 – L’approccio meshless con il Metodo delle Celle
dei relativi bilanci e questo si traduce, evidentemente, nella perdita di simmetria
nella matrice che riassume i bilanci nodali.
Figura 4.2. Generazione delle mesh locali e definizione delle regioni tributarie: i
nodi primali sono indicati con il simbolo “+”, il contorno del dominio in linea tratteggiata, in linea continua sono definite le celle locali e in linea spessa le celle duali
associate ai “poli” di volta in volta considerati, ottenuti dalla suddivisione delle
celle della mesh locale; in a), b) e c) sono illustrate mesh locali di elementi triangolari ottenute considerando rispettivamente 4, 8 e 6 nodi satellite; in d) illustrata la
situazione di un nodo di bordo
.
Esclusa la natura globale della costruzione della mesh e del bilancio al nodo,
l’approccio non presenta significativi elementi di novità: le celle del complesso locale costituiscono il supporto per l’attribuzione delle grandezze coinvolte
nel problema fisico trattato e identiche restano le relazioni che portano alla costruzione del bilancio locale ai nodi di cella. Nei due paragrafi seguenti questo
approccio meshless a celle locali verrà presentato nelle sue applicazioni al problema della condizione termica in regime stazionario, e al problema dello studio
della deformazione di sistemi piani in regime di piccoli spostamenti, due ambiti
assunti come riferimento in tutte le indagini esplorative di questo elaborato.
82
4.2 – Meshless a celle locali con il CM
4.2.1 Conduzione termica in regime stazionario
Si assuma che in un sistema di geometria proprietà fisiche (conducibilità termica
k) note, siano stati posizionati un conveniente numero di punti (o nodi) sia all’interno che sul contorno, avendosi in particolare un nodo in corrispondenza di
ogni eventuale vertice. La posizione dei nodi sia nota rispetto ad una riferimento
cartesiano globale esterno XOY , come illustrato in figura (4.3).
Figura 4.3. Distribuzione di nodi nel dominio in esame e definizione di una mesh
locale attorno al generico nodo interno PP con sei nodi satellite Si
Note le condizioni al contorno (temperature imposte, sorgenti di calore concentrate, flussi di calore sul contorno) ci si pone l’obiettivo di determinare i valori
della temperatura in ogni nodo.
L’algoritmo prevede la definizione di una mesh di celle primali localmente nodo
a nodo; preso in esame un generico nodo polo P :
• si individuano i più vicini nodi circostanti4 ;
• si ordinano i o questi nodi in senso, ad esempio, antiorario rispetto al nodo
polo, in modo tale da avere una lista ordinata di N nodi satellite Si ;
4
l’individuazione dei nodi circostanti può avvenire con un criterio empirico di individuazione
dei nodi contenuti all’interno di una circonferenza di raggio R valutato a partire da informazioni
circa la densità - globale o locale - dei nodi
83
4 – L’approccio meshless con il Metodo delle Celle
• si definiscono N celle locali ci : le prime N − 1 celle avranno vertici P,Si ,Si+1 ;
l’ultima avrà vertici P,SN ,S1 ;
• si provvede alla definizione della regione tributaria del nodo polo: un modo
immediato è ad esempio quello di creare il complesso di celle duale locale a
partire dal complesso primale locale appena definito;
Figura 4.4. Creazione della regione tributaria del nodo polo: a sinistra la regione
è individuata dalla divisione di ogni cella appoggiata al baricentro e ai punti medi
dei lati, come usualmente effettuato nel CM tradizionale; nella figura di destra la
regione è delimitata in ogni cella da una superficie parallela al lato di cella opposto
al nodo polo e passante per il baricentro di cella
• cella per cella si calcolano i flussi di calore in transito attraverso la superficie di confine tra la cella duale del nodo polo e il resto della cella; queste
grandezze saranno funzione dei valori di temperatura nodale dei vertici
della cella esaminata. Con riferimento alle notazioni di figura (4.5) il flusso
attraverso l’elemento di superficie piana orientata A è esprimibile come5 :
·
¸ Th
¤
1 £
A
Aix Ajx
Ax Ay Kc hx
T
QcP =
(4.2)
Ahy Aiy Ajy c i
2t Ac
Tj c
essendo:
– t lo spessore del sistema piano;
– Ac l’area della cella c;
– Ax e Ay le componenti del vettore area A;
– Kc la matrice di conducibilità termica della cella c;
84
4.2 – Meshless a celle locali con il CM
Figura 4.5. Flusso attraverso una superficie orientata A nella cella c: orientazione dei vettori area; a puro titolo di esempio è stata assunta l’esatta geometria della cella 1 di vertici P,S1 ,S2
– Ahx ,Ahy ,Aix , . . . i vettori area associati ai lati della cella c di cui alla
figura (4.5).
• si scrive il bilancio di calore al nodo polo, imponendo l’equivalenza tra il
calore generato GP all’interno della sua regione tributaria e il calore uscente
dalle sue superfici di contorno; avendo calcolato, cella per cella del complesso locale, tutti i termini di flusso QcP attraverso le porzioni di superficie
AcP di contorno della regione tributaria del nodo polo P , si ha
X
QcP = GP
(4.3)
c∈I(P )
dove il termine a primo membro è espresso in funzione dei valori nodali
di temperatura di tutti i nodi satellite Si della costellazione. Si ottiene una
espressione nella forma:
TP
T
S
1
£
¤
kP kS1 kS2 . . . kSN c TS2
= GP
(4.4)
...
TSN c
5
cfr. [30]
85
4 – L’approccio meshless con il Metodo delle Celle
I coefficienti della matrice a primo membro andranno a posizionarsi nella
matrice fondamentale del sistema lineare risolvente alla riga corrispondente all’indice di nodo asociateo al nodo polo nella numerazione complessiva
globale dei nodi; le colonne in cui si posizioneranno i vari coefficienti sono
quelle corrispondenti agli indici dei nodi della costellazione (polo e satelliti)
nella medesima numerazione. Analogamente accade per il valore a secondo membro che va a costituire posizionarsi nel termine noto del sistema
risolvente alla riga associata al nodo polo.
Nota: come precisato nell’introduzione, la definizione della regione tributaria
attorno al nodo polo è arbitraria. Nel caso siano presenti sorgenti distribuite è necessario assicurare una piena copertura del dominio con l’insieme delle regioni
tributarie locali, pena l’errato computo dei termini di sorgente.
4.2.1.1 Nodi di bordo
La procedura da seguire per i nodi di bordo rimane sostanzialmente inalterata;
come peraltro già nell’approccio tradizionale, nel bilancio al nodo polo andranno
tenuti presente anche eventuali flussi di calore applicati al contorno del dominio
nella porzione ΦP che interessa la cella duale del polo. L’equazione (4.3) assume
dunque la forma:
X
QcP = GP + ΦP
(4.5)
c∈I(P )
4.2.1.2 Alcuni test numerici
Per verificarne l’accuratezza, l’approccio descritto è stato applicato alla soluzione
della equazione di Laplace ∇2 (w) = 0 su un domino piano quadrato di lato unitario centrato nell’origine di un sistema di riferimento cartesiano con assi paralleli
ai lati; nel dominio sono stati posizionati dei punti secondo una griglia regolare
parallela ai lati; Da questa griglia, con spostamenti random e facendo in modo di
avere un punto in ogni vertice e un certo numero di punti posizionati lungo ciascun lato6 , si sono poi ottenute delle distribuzioni casuali di punti nel dominio.
Sui punti del contorno sono stati imposti i valori assunti dalla funzione armonica:
wt (x,y) = ex cos y
(4.6)
soluzione del problema, il cui grafico è raffigurati in figura (4.7).
Come parametro di valutazione della precisione della soluzione numerica, viene
6
per i punti posizionati sui lati lo spostamento avviene lungo il lato stesso mentre i punti
posizionati sui vertici non subiscono alterazioni di posizione
86
4.2 – Meshless a celle locali con il CM
Figura 4.6. Bilancio sulla regione tributaria di un nodo di bordo quando presente
un valore di flusso sul contorno del dominio
Figura 4.7.
Funzione armonica ex cos y nel dominio di lato unitario oggetto del test
87
4 – L’approccio meshless con il Metodo delle Celle
utilizzato il valore dello scarto quadratico medio rispetto alla soluzione teorica:
s
PNi
2
i=1 (wt,i − wi )
δ =
(4.7)
Ni
essendo Ni il numero di nodi interni (quelli su cui non sono stati imposti i valori della funzione soluzione del problema), wt,i il valore assunto dalla soluzione
teorica nel punto i e wi il valore ottenuto dalla soluzione numerica nello stesso
punto.
Il problema così posto è stato risolto con la procedura meshless a celle locali sopra descritta, implementata con riferimento a costellazioni locali composte da 4
satelliti.
La stima dell’ordine di convergenza, ossia del decrescere dell’errore al diminuire
di una misura significativa della distanza dei punti, è stata effettuata con riferimento ad una griglia regolare di punti, situazione in cui il passo di griglia dà una
misura esatta della dimensione associata alla distribuzione di punti. La tabella
(4.1) riporta i valori ottenuti per il parametro δ con passi della griglia man mano
ridotti:
lato
0.5
0.25
0.125
0.0625
0.03125
δ
0.002604
0.000543
0.000122
0.000029
0.000007
Tabella 4.1. Valore dell’errore medio δ per i punti interni al dominio al variare
del passo della griglia di punti
Questi stessi valori, riportati in scala logaritmica nel grafico di figura (4.8),
evidenziano come l’ordine di convergenza, per le varie interpolazioni sia pari a
2; relativamente alla griglia regolare di punti.
4.2.2 Sistemi elastici piani in regime di piccoli spostamenti
Come caso del problema scalare sia dato un sistema piano di geometria e propriretà note, su cui siano applicate delle forze e siano imposti dei vincoli agli
spostamenti. All’interno e sul contorno di questa geometria venga disposto un
conveniente numero di punti la cui posizione sia nota relativamente ad un riferimento cartesiano globale xOy, come illustrato in figura (4.3). Lo scopo che ci si
88
4.2 – Meshless a celle locali con il CM
Figura 4.8. Errore medio rispetto al passo di griglia per le implementazioni con 4,5 e 8 nodi satellite
prefigge è quello di determinare le componenti del vettore spostamento in tutti i
punti posizionati.
La procedura sarà sostanzialmente la stessa illustrata nel precedente paragrafo
4.2.1, con la differenza che entro ogni cella andrà determinata la forza agente su
ogni porzione di superficie delimitante la regione tributaria del nodo polo in funzione dei valori delle componenti di spostamento nodale.
Per chiarezza la procedura viene qui riassunta, dedicando maggiore attenzione
alle operazioni specifiche del problema ora trattato; considerato un generico nodo
P interno al dominio, assunto come nodo polo
• costruire la mesh locale di celle primali con un conveniente numero di nodi
satellite scelti tra quelli prossimi circostanti in modo da ottenere un insieme
di celle triangolari adiacenti, tutte aventi in comune il nodo polo P e aventi
adeguata regolarità di forma (come suggerito dalla figura (4.3));
• definire la regione tributaria del nodo polo, provvedendo alla costruzione
del complesso duale locale (come suggerito dalla figura (4.4));
• cella per cella si calcolano le forze agenti sulla superficie di confine tra la
cella duale del nodo polo e il resto della cella; queste grandezze saranno
89
4 – L’approccio meshless con il Metodo delle Celle
funzione dei valori delle componenti dello spostamento dei vertici della
cella esaminata. Con riferimento alle notazioni di figura (4.9) la forza agente
sull’elemento di superficie piana orientata A è esprimibile come7 :
uh
v
h
½
¾
·
¸
T
A
0
A
u
P,x
x
y
i
c
TP =
=
D c Bc
(4.8)
TP,y
0 Ay Ax
vi
u
j
vj c
essendo:
Figura 4.9. Forza agente su una superficie orientata A nella generica cella c:
orientazione dei vettori area; a puro titolo di esempio è stata assunta l’esatta
geometria della cella 1 di vertici P,S1 ,S2
– Ax e Ay le componenti del vettore area A;
– D la matrice del legame costitutivo che, per uno stato piano di tensione
in un materiale omogeneo e isotropo, è:
1 ν
0
E ν 1
0
(4.9)
Dc =
2
1−ν
1−ν
0 0
2
7
cfr. [61]
90
4.2 – Meshless a celle locali con il CM
con E modulo di elasticità e ν modulo di Poisson del materiale;
– B la matrice che esprime il vettore gradiente degli spostamenti nella
cella c:
Ahx 0 Aix 0 Ajx 0
1
0 Ahy 0 Aiy 0 Ajy
Bc = −
(4.10)
2 t Ac
Ahx Ahy Aix Aiy Ajx Ajy
con t spessore del sistema piano, Ac area di cella e in cui compaiono le
componenti dei vettori area di cella di cui alla notazione di figura (4.9)
– uh ,vh ,vi , . . . le componenti dello spostamento nodale ai nodi di cella h,
ii e j.
• si scrive il bilancio delle forze al nodo polo, imponendo la condizione di
equilibrio tra le forze di volume FP agenti sulla sua regione tributaria e le
forze agenti sulle sue superfici di contorno; avendo calcolato, cella per cella
del complesso locale, tutti i termini delle forze di superficie TcP attraverso le
porzioni di superficie AcP di contorno della regione tributaria del nodo polo
P , si ha
X
TcP = FP
(4.11)
c∈I(P )
dove il termine a primo membro è espresso in funzione dei valori nodali
delle componenti di spostamento di tutti i nodi satellite Si della costellazione. Si ottiene una espressione nella forma:
u
P
v
P
u
S
1
½ ¾
·
¸
vS1
Fx
kP,u 0 kS1 ,u
0
kS2 ,u
0
. . . kSN ,u
0
uS1
=
Fy
0 kP,v
0
kS1 ,v
0
kS2 ,v 0
. . . kSN ,v c
vS1
...
u
S
N
vSN c
(4.12)
I coefficienti della matrice a primo membro andranno a posizionarsi nella matrice fondamentale del sistema lineare risolvente alle righe associate
al nodo polo e nelle colonne associate ai nodi satellite nella numerazione
globale dei nodi8 .
8
se M è l’indice associato ad un nodo, le righe (e le colonne) associate hanno indice 2M − 1 e
2M
91
4 – L’approccio meshless con il Metodo delle Celle
4.2.2.1 Test sulla trave di Timoshenko
L’indagine sulla precisione dell’implementazione è stata condotta relativamente
al problema della trave di Timoshenko, per il quale si dispone di una soluzione
analitica di confronto. Si tratta di una trave ”incastrata“ ad una estremità e assoggetta ad una distribuzione parabolica di sforzi di taglio all’estremità opposta,
come illustrato in figura (4.10).
Figura 4.10. Trave di Timoshenko: schema schema statico, condizioni di carico,
riferimento cartesiano e notazioni adottate; si noti come la condizione di vincolo
sia approssimata e valevole solo ai fini delle stime e dei calcoli tecnico-ingegneristici, prevedendo la soluzione teorica per x = 0 spostamenti non nulli
Per il problema, relativamente ad un materiale omogeneo e isotropo, il campo
di spostamenti {u,v} è definibile in forma chiusa dalle relazioni9 :
·
µ
¶¸
Py
D2
2
u = −
(6L − 3x) x + (2 + y) y −
6EJ
4
·
¸
(4.13)
2
P
D x
2
2
v = −
3νy (L − x) + (4 + 5ν)
− (3L − x) x
6EJ
4
essendo:
• E e ν il modulo di elasticità e il modulo di Poisson, rispettivamente, del
materiale;
• P la risultante degli sforzi di taglio;
• L e D la lunghezza e l’altezza della trave;
• x e y le coordinate del punto nel riferimento di figura (4.10).
9
[62]
92
4.3 – Interpolazione locale con funzioni polinomiali
L’analisi delle (4.13) evidenzia come per x = 0 le componenti dello spostamento
non siano affatto nulle, variando invece in modo parabolica con la coordinata y.
La definizione della trave di Timoshenko come di una “trave incastrata” è un’approssimazione lessicale giustificata dall’esiguità (relativa) degli spostamenti, solamente nel contesto della pratica tecnico ingegneristica. Ai fini della valutazione di precisione degli spostamenti predetti, al contrario, le condizioni di vincolo
devono essere introdotte coerentemente con le ipotesi del problema, condizioni
sotto le quali le (4.13) valgono esattamente [63]. Per riprodurre il problema sono stati dunque imposti i valori di spostamento previsti dalla soluzione esatta su
tutti i punti del contorno, andando ad indagare la corrispondenza tra soluzione
numerica e soluzione teorica nei punti interni.
I parametri descrittivi del problema trattato nel test sono riassunti in tabella (4.2);
il test è stato condotto adottando una costellazione costituita da 4 nodi satellite
per i nodi di interni, da tre satelliti per io nodi di bordo e da due per i nodi di vertice (singola cella); come metrica di precisione è stato considerato il valore quadratico medio del modulo della differenza (vettoriale) tra spostamento numerico
e spostamento teorico in ciascuno dei punti non vincolati:
sP £
2
2¤
N i (ui,num − ui,t ) + (vi,num − vi,t )
δ =
(4.14)
Ni
avendo indicato con
• Ni il numero dei nodi interni (dunque non vincolati, e per cui ha senso il
confronto con la soluzione teorica);
• con u e con v le componenti del vettore spostamento secondo la direzione x
e y, rispettivamente, del sistema di riferimento globale;
• con il pedice num un valore di soluzione numerica;
• con il pedice t un valore di soluzione teorica;
Il calcolo è stato condotto distribuendo dei punti all’interno del dominio secondo
una griglia regolare equispaziata; i valori di δ al variare del passo di griglia sono
riportati in tabella (4.3) e, in scala logaritmica, in figura (4.11).
4.3 Interpolazione locale con funzioni polinomiali
Nel precedente paragrafo è stata presentato un approccio meshless immediatamente offerto dalla struttura concettuale e procedurale del Metodo delle Celle.
93
4 – L’approccio meshless con il Metodo delle Celle
parametro
L
D
E
ν
P
valore unità di misura
8
2
1e3
0.25
2
m
m
GPa
N
Tabella 4.2. Parametri descrittivi il problema della trave di Timoshenko usato per il confronto
numerico
lato
δ
1
0.5
0.25
0.125
0.0082415
0.0071274
0.0066124
0.0063476
Tabella 4.3. Valore dell’errore
medio δ per i punti interni al
dominio al variare del passo della
griglia di punti
Figura 4.11. Test della trave di Timoshenko: errore medio rispetto al passo di
griglia in scala logaritmica con approccio CM meshless a celle locali.
Il concetto di bilancio di nodo condotto sulla regione tributaria costituita dalla
corrispondente cella duale, suggerisce infatti la definizione di una mesh “locale”
che circondi ogni singolo nodo, allo scopo di definirne l’associata cella duale, sua
regione tributaria. La definizione delle grandezze coinvolte nel bilancio di nodo,
avviene cella per cella con la consueta interpolazione delle grandezze nodali di
cella. Sotto questo profilo, le celle primali del complesso primale locale definito
attorno al nodo polo costituiscono quindi una infrastruttura per collocare e definire le grandezze coinvolte nel bilancio locale del nodo polo. In particolare le
94
4.3 – Interpolazione locale con funzioni polinomiali
singole celle sono il supporto per la interpolazione locale dei valori nodali delle
ricercate variabili di configurazione (e delle grandezze da esse derivate).
Questa considerazione, unitamente all’ispirazione offerta da alcune metodologie
meshless in ambito prettamente differenziale, suggeriscono la seguente procedura:
• fissata l’attenzione su un nodo (il nodo polo), individuare un certo numero
di nodi prossimi circostanti (i nodi satellite) definendo una costellazione di
punti;
• interpolare i valori incogniti delle variabili di configurazione nei vari punti
della costellazione con una funzione analiticamente definita (ad esempio un
polinomio di grado opportuno);
• derivare analiticamente le grandezze coinvolte nell’equazione di bilancio,
attraverso le equazioni di struttura e costitutive applicate analiticamente
alle funzioni interpolanti adottate;
• scrivere l’equazione bilancio del nodo polo relativamente ad una regione
tributaria di forma elementare (circonferenza/sfera, quadrato/cubo) centrata sul polo polo stesso;
Da quanto esposto resta lecito chiedersi quanto un simile approccio sia, dal
punto di vista della categorizzazione, affiliabile al Metodo delle Celle: del Metodo delle Celle viene infatti conservata solamente l’idea di bilancio su una regione
tributaria di nodo ad estensione discreta; per il resto la formulazione algebrica
delle equazioni coinvolte risulta appannata da un significativo uso di equazioni
integro-differenziali; pure la filosofia del riferimento delle variabili agli elementi
geometrici risulta sfumata.
A lungo si potrebbe quindi discutere sulla la proprietà con cui la letteratura abbia
accettato (almeno relativamente alla prima delle due formulazioni che verranno di seguito proposte) di annoverare questi approcci nella famiglia del Metodo
delle Celle; la questione, che pure è tutt’altro che marginale, appare in questo
contesto di secondario rilievo: oggetto della ricerca non è infatti specificamente
l’indagine circa l’applicabilità del Metodo delle Celle ai problemi di biomeccanica; il lavoro è invece piuttosto una riflessione concentrata sulle alternative al FEM
che presentino carattere di innovazione10 . Sotto questo aspetto, accettando temporaneamente la denominazione di Metodo delle Celle in attesa che la comunità
10
come riportato nella presentazione del lavoro la valutazione che ha portato a identificare nel
FEM il metodo numerico di elezione per lo studio di problemi di biomeccanica ortopedica ha nel
passato affrontato una valutazione critica di tutte le alternative disponibili tra quelle consolidate
per la categoria di problemi affini
95
4 – L’approccio meshless con il Metodo delle Celle
scientifica affronti e risolva la questione, gli approcci proposti rappresentano sicuro motivo di interesse, tanto da giustificare la loro presenza in questo elaborato
esplorativo.
Nel seguito verranno quindi presentate due formulazioni che implementano la
procedura descritta. La prima delle due formulazione adotta come funzione interpolante i polinomi; essa, presentata in [60] relativamente alla soluzione dell’equazione di Laplace in domini bidimensionalli, viene qui riportata, sviluppata, e
applicata alla soluzione del problema della deformazione elastica di sistemi piani in regime di piccoli spostamenti, di seguito denominato, per mere ragioni di
sintesi, come “problema dell’elasticità piana” .
Il secondo approccio muove dall’intenzione di superare alcuni limiti dovuti all’interpolazione polinomiale: esso usa le funzioni di base radiale per l’interpolazione locale delle grandezze incognite e viene qui presentato e descritto relativamente ad entrambi i problemi sin qui trattati (campi scalari e problema
dell’elasticità piana).
Una prima e immediata idea per interpolare localmente nell’intorno del nodo
polo i valori assunti dalla variabile di configurazione (incognita) nei nodi circostanti è l’adozione di una funzione polinomiale. Ragioni di simmetria (il problema prescinde dal riferimento adottato) impongono la scelta di un polinomio in
cui le coordinate coinvolte figurino con uguale grado. Specificamente la scelta
avviene attingendo al cosiddetto triangolo di Pascal11 per la selezione delle funzioni interpolanti. Nel seguito verranno descritti nel dettaglio le formulazioni per
i due problemi (scalare e vettoriale) di riferimento.
4.3.1 Campo scalare stazionario
Considerando come riferimento il problema della conduzione del calore in regime stazionario all’interno di un dominio bidimensionale: sia dato un sistema piano nel quale siano stati posizionati un certo numero di punti, di seguito chiamati
“nodi”, la cui posizione sia riferita ad un sistema di assi cartesiani di riferimento.
Lo scopo é quello di determinare la temperatura in ciascuno dei punti, note che
siano le condizioni al contorno (temperature o flussi di calore imposti).
Si consideri un generico nodo Pp interno al dominio e si adotti un sistema di riferimento cartesiano locale con origine in questo nodo e assi paralleli al sistema
di riferimento globale. Tra i nodi prossimi al nodo polo, si selezioni una costellazione di nodi satellite Si ; per semplicità di illustrazione si assuma ora che la
costellazione sia composta da 4 satelliti.
11
cfr. [64] cap. 7
96
4.3 – Interpolazione locale con funzioni polinomiali
Figura 4.12. Costellazione di 4 satelliti attorno ad un generico nodo interno assunto come polo
Nell’intorno del polo Pp il campo scalare studiato verrà approssimato interpolando i valori Ti ai nodi della costellazione (polo Pp più satelliti Si ) con una
funzione polinomiale di grado due:
T (P ) = T (x,y) = a + bx + cy + dx2 + ey 2
(4.15)
I quattro coefficienti sono determinabili imponendo che il polinomio assuma
in ciascun punto della costellazione il valore scalare assunto dal campo in quel
punto:
T (Pi ) = T (xi ,yi ) = a + bxi + cyi + dx3i + eyi2 = Ti .
(4.16)
Le componenti del vettore gradiente della temperatura12 gC in un punto P (x,y)
sono esprimibili in forma analitica derivando la funzione di interpolazione locale:
gx =
∂T
= b + 2dx
∂x
∂T
gy =
= c + 2f y.
∂y
(4.17)
Il flusso unitario di calore q è correlato con il vettore gradiente delle temperature
a meno della conducibilità termica k del mezzo13 :
qC = −kgC .
12
13
(4.18)
il pedice C si rende necessario riferendosi all’interpolazione locale della costellazione C
si è supposto qui per semplicità che il mezzo abbia comportamento isotropo
97
4 – L’approccio meshless con il Metodo delle Celle
Nell’intorno del polo Pp il calore che attraversa una superficie orientata S di
versore normale n è evidentemente esprimibile come:
Z
Z
QS =
q nC dS =
S
(qx nx + qy ny ) dS
(4.19)
S
Definita una regione tributaria ΩP attorno al nodo polo, delimitata dalla superficie chiusa ∂ΩP , il bilancio di nodo impone l’equivalenza tra il flusso netto di
calore uscente attraverso la superficie Q∂ΩP e il calore generato QΩP all’interno
del volume da essa racchiuso:
QΩP = Q∂ΩP
essendo:
(4.20)
Z
Q∂ΩP = −k
∂ΩP
(gx nx + gy ny ) dS = QΩP .
(4.21)
Figura 4.13. Regione tributaria circolare centrata nel nodo polo; è evidenziato il sistema di riferimento polare locale e la sua relazione con il
riferimento cartesiano locale
Adottando come regione tributaria una “opportuna” figura piana “elementare” è possibile pervenire ad una espressione analitica del flusso di calore netto
attraverso la superficie di contorno.
98
4.3 – Interpolazione locale con funzioni polinomiali
Si consideri ad esempio come regione tributaria del nodo polo un cerchio di raggio R centrato nel polo. Il valore di R è di principio arbitrario e può essere convenientemente assunto pari al valore medio delle distanza dei nodi satellite dal nodo polo. È qui conveniente adottare un riferimento polare locale centrato nel nodo polo, avente asse di riferimento l’asse delle ascisse del riferimento cartesiano
locale, come illustrato dalla figura (4.13). Essendo:
x = ρ cos θ
y = ρ sin θ
(4.22)
il flusso netto attraverso ∂ΩP assume la forma:
Z
Q∂ΩP = −tk
2π
[(2 d cosθ R + b) gx R cos θ + (2 e sin θ R + c) R sin θ] dθ
0
= −2πtk (e + d) R
(4.23)
2
essendo t lo spessore del sistema piano.
Nodi di contorno Se il nodo polo Pp risulta posizionato sul contorno del dominio, la procedura descritta resta inalterata. Con riferimento alla figura (4.14):
• il flusso di calore uscente dalla superficie di confine della regione tributaria
assumerà, in termini generici, la forma:
Z
Q∂ΩP = −tk
θ2
[(2 d cosθ R + b) gx R cos θ + (2 e sin θ R + c) R sin θ] dθ
θ1
(4.24)
• l’equazione di bilancio contemplerà anche la quota parte dell’eventuale flusso imposto al contorno intercettata dalla regione tributaria:
Q∂ΩP = QΩP + QB∩ΩP
(4.25)
Se φ è il flusso unitario entrante imposto al contorno, si ha
QB∩ΩP = 2R φ
(4.26)
4.3.1.1 Aspetti implementativi
Nell’ottica di una implementazione della procedura in un codice numerico dedicato, conviene accennare all’impostazione “vettoriale” della procedura descritta.
99
4 – L’approccio meshless con il Metodo delle Celle
Figura 4.14.
Regione tributaria per un polo situato sul bordo del dominio
Innanzitutto l’interpolazione locale può essere espressa nella forma:
a
b
£
¤
2
2
2
2
c
(4.27)
T (P ) = T (x,y) = a + bx + cy + dx + ey = 1 x y x y
d
e
Imponendo che la funzione assuma nei nodi della costellazione i valori del campo
ad essi associati, si ottiene il sistema di equazioni lineari:
a
1 x1 y1 x21 y12
T1
1 x2 y2 x22 y22
b
T
2
2
2
1 x3 y 3 x3 y 3 c = T 3
(4.28)
1 x4 y4 x24 y42
T
d
4
2
2
e
T5
1 x5 y 5 x5 y 5
sinteticamente esprimibile in forma matriciale come
MC aC = TC
ove con il pedice
esaminata.
C
(4.29)
si è inteso indicare il riferimento alla costellazione di punti
100
4.3 – Interpolazione locale con funzioni polinomiali
Il vettore dei coefficienti del polinomio interpolante viene quindi ad essere espresso dalla:
aC = M−1
(4.30)
C TC
Il vettore gradiente può venire scritto come:
½ ¾
·
¸
gx
0 1 0 2x 0
gC =
=
a
gy C
0 0 1 0 2y C
e il flusso unitario assume quindi la forma:
½ ¾
·
¸
qx
0 1 0 2x 0
= −k
qC =
a .
qy C
0 0 1 0 2y C
(4.31)
(4.32)
Se il materiale fosse anisotropo, alla costante k andrebbe sostituita la matrice 14 :
·
¸
kxx kxy
(4.33)
kyx kyy
Il flusso netto attraverso la superficie di contorno della regione tributaria del polo,
essendo n = {nx ,ny } il versore della normale alla superficie, assume la forma:
Z
Q∂ΩP =
n qC dS
∂ΩP
¸
·
0 1 0 2x 0
aC dS
= −k
n
0 0 1 0 2y
∂ΩP
¸
·
Z 2π
©
ª 0 1 0 2R cos θ
0
R cos θ R sin θ
= −tk
a dθ
0 0 1
0
2R sin θ C
0
£
¤
= −2πR2 tk 0 0 0 1 1 aC
Z
(4.34)
essendo t lo spessore del sistema piano. Utilizzando la (4.30), si ottiene immediatamente:
£
¤
Q∂ΩP = −2πR2 tk 0 0 0 1 1 M−1
(4.35)
C TC
Il vettore
£
¤
kP = −2πR2 tk 0 0 0 1 1 M−1
C TC
14
(4.36)
il caso in oggetto considera, per pura compattezza di notazione e senza per questo perdere
di generalità, una costellazione composta da 4 nodi satellite; in questo caso, la presenza di un
materiale anisotropo porterebbe ad un vettore flusso unitario, espresso dalla (4.32), in cui risulterebbero assenti i termini kxy e kyx ; se, come illustrato nei test di seguito riportati, la costellazione
a 4 nodi registra buona accuratezza in presenza di un mezzo isotropo, per trattare correttamente
l’anisotropia nella conduzione del calore si rende quindi necessaria una costellazione più ricca di
satelliti
101
4 – L’approccio meshless con il Metodo delle Celle
contiene i valori da inserire nella matrice fondamentale K del sistema risolvente
KT = Q
(4.37)
alla riga corrispondente all’identificativo del nodo polo nella numerazione globale. Le colonne in cui gli elementi di kP vanno collocati corrispondono alle colonne di indice pari al numero identificativo di ogni singolo nodo della costellazione
nella numerazione globale.
4.3.1.2 Instabilità
Oltre a richiedere una costellazione locale composta da un ben determinato numero di nodi satellite, l’interpolazione polinomiale locale del campo incognito
risulta essere poco robusta rispetto alla disposizione geometrica della costellazione di punti su cui si appoggia. Particolari disposizioni dei nodi satellite attorno
al polo non rendono infatti possibile l’interpolazione locale con la funzione polinomiale adottata. Che possano sussistere delle configurazioni geometriche inadeguate ad individuare una funzione interpolante in grado di cogliere i valori ai
nodi è un fatto intuibile: se la funzione interpolante fosse di tipo lineare, occorrerebbero, evidentemente, tre punti non allineati per poterla “appoggiare” ai valori
nodali15 .
Talune disposizioni di punti rendono quindi il problema dell’interpolazione malcondizionato: in termini generali quando un problema è malcondizionato, piccole variazioni nei valori di ingresso si traducono in enormi errori nei valori ottenuti come risultato. Nel caso dell’interpolazione si ha la situazione in cui gli
errori di macchina nella valutazione, ad esempio, della posizione geometrica dei
punti provocano errori enormi nella stima dei valori della funzione interpolata e,
in ultima analisi, nella stima dei valori delle temperature nodali.
L’inadeguatezza della disposizione della costellazione di punti rispetto alla funzione interpolante si traduce in un valore numerico elevato di una quantità detta
“numero di condizionamento” della matrice M definito come16 :
µ (R) = kMk kM−1 k
(4.38)
Più il problema risulta ben condizionato, più il valore di µ risulta essere “contenuto”.
A parità di conformazione della costellazione di punti, può poi presentarsi un
altro problema: consideriamo a titolo di esempio una costellazione di 4 satelliti
15
il problema è geometricamente visualizzabile con la disposizione di una superficie piana su
tre appoggi: perché l’appoggio non sia instabile, i tre punti devono essere distinti e non allineati
16
cfr. [65]
102
4.3 – Interpolazione locale con funzioni polinomiali
Figura 4.15. Costellazione di 4 satelliti posti a uguale distanza dal
nodo polo e allineati a coppie secondo direzioni parallele agli assi
del sistema di riferimento locale
Figura 4.16. Costellazione di 4 satelliti posti a uguale distanza dal
nodo polo e allineati a coppie secondo direzioni tra loro ortogonali
e inclinate di π/4 rispetto agli assi
del sistema di riferimento locale
disposti come in figura (4.15): nel sistema cartesiano locale centrato nel polo, la
matrice MC assume la forma:
1 0
0 0 0
1 d
0 d2 0
2
1
0
d
0
d
MC =
(4.39)
1 −d 0 d2 0
1 0 −d 0 d2
ruotando questa costellazione di punti di π/4, si ottiene la disposizione di figura
(4.16); nel riferimento cartesiano locale la matrice dei coefficienti diviene ora:
1 √0
0 0
√0
1
√d
√d d d
(4.40)
MC =
1 −√d
√d d d
1 − d − d d d
√
√
1
d − d d d
In questo secondo caso il determinante della matrice MC risulta nullo: questa
seconda disposizione di punti risulta quindi inadatta. Dal punto di vista geometrico le due costellazioni sono equivalenti, risultando inalterata la posizione
103
4 – L’approccio meshless con il Metodo delle Celle
mutua tra i vari punti della costellazione; quello che è cambiato nei due casi è la
posizione relativa tra sistema di riferimento e costellazione di punti.
Questa osservazione suggerisce un metodo per affrontare tutti quei casi in cui la
singolarità della matrice di interpolazione sia dovuta alla particolare disposizione tra sistema locale di riferimento e costellazione di punti: siccome il flusso di
calore attraverso una superficie è invariante rispetto al riferimento, si può pensare di ruotare il riferimento locale attorno al polo in modo tale da rendere massimo
il numero di condizionamento della matrice dei coefficienti dell’interpolazione.
Va infine sottolineato come, una volta individuata la rotazione del sistema locale,
si debba provvedere ad esprimere in questo riferimento gli elementi della matrice
dei coefficienti dell’interpolazione M ; poiché il bilancio tratta grandezze scalari,
non vi sono, come invece sarà illustrato a proposito del problema elastico, ulteriori operazioni per riportare le grandezze coinvolte nel bilancio nel sistema di
partenza
4.3.1.3 Alcuni test numerici
Al fine di verificarne l’accuratezza, l’approccio descritto è stato applicato alla soluzione della equazione di Laplace ∇2 (w) = 0 su un domino piano quadrato di
lato unitario centrato nell’origine di un sistema di riferimento cartesiano con assi
paralleli ai lati; nel dominio sono stati posizionati dei punti secondo una griglia
regolare parallela ai lati; da questa griglia, con spostamenti random e facendo in
modo da avere un punto in ogni vertice e un certo numero di punti posizionati
lungo ciascun lato17 , si sono poi ottenute delle distribuzioni casuali di punti nel
dominio.
Sui punti del contorno sono stati imposti i valori assunti dalla funzione armonica:
wt (x,y) = ex cos y.
(4.41)
Come parametro di valutazione della precisione della soluzione numerica, viene
utilizzato il valore dello scarto quadratico medio rispetto alla soluzione teorica:
s
PNi
2
i=1 (wt,i − wi )
δ =
(4.42)
Ni
essendo Ni il numero di nodi interni (quelli su cui non sono stati imposti i valori della funzione soluzione del problema), wt,i il valore assunto dalla soluzione
teorica nel punto i e wi il valore ottenuto dalla soluzione numerica nello stesso
punto.
17
per i punti posizionati sui lati lo spostamento avviene lungo il lato stesso mentre i punti
posizionati sui vertici non subiscono alterazioni di posizione
104
4.3 – Interpolazione locale con funzioni polinomiali
Il problema così posto è stato risolto con la procedura meshless ad interpolazione polinomiale sopra descritta, implementata con riferimento a costellazioni locali composte da diverso numero di nodi (ossia con differenti polinomi di
interpolazione locale):
T4 = a + bx + cy + dx2 + ey 2
T5 = a + bx + cy + dx2 + exy + f y 2
T8 = a + bx + cy + dx2 + exy + f y 2 + gx2 y + hxy 2 + ix2 y 2
(4.43)
ove si è inteso indicare con il pedice il numero dei nodi satellite.
Come regione tributaria del nodo i è stato assunto un cerchio di raggio pari a
metà del valore medio della distanza media dei satelliti dal nodo polo [66]. Le
espressioni della i-esima riga della matrice fondamentale (esprimente il flusso
netto attraverso la superficie di confine della regione tributaria del polo) di cui
alla formula (4.36) sono, rispettivamente:
£
¤
kP,4 = −tkπR2 0 0 0 1 1 M−1
£
¤C −1
2
kP,5 = −tkπR 0 0 0 1 0 1 MC
(4.44)
£
¤ −1
2
2
kP,8 = −tkπR 0 0 0 2 0 2 0 0 R MC
La stima dell’ordine di convergenza, ossia del decrescere dell’errore al diminuire
di una misura significativa della distanza dei punti, è stata effettuata con riferimento ad una griglia regolare di punti, situazione in cui il passo di griglia dà una
misura esatta della dimensione associata alla distribuzione di punti. La tabella
(4.4) riporta i valori ottenuti per il parametro δ con passi della griglia man mano
ridotti:
passo di
griglia
0.5
0.2500
0.1250
0.0625
errore medio δ
4 satelliti
5 satelliti
8 satelliti
0.00376808
0.00078737
0.00017645
0.00004159
0.00376808
0.00078737
0.00017645
0.00004159
0.00384507
0.00062571
0.00013119
0.00003041
Tabella 4.4. Valore dell’errore medio δ per i punti interni al dominio al
variare del passo della regolare di punti, con differenti composizioni della
costellazione locale.
Questi stessi valori, riportati in scala logaritmica nel grafico di figura (4.17),
evidenziano come l’ordine di convergenza, per le varie interpolazioni sia pari a 2;
105
4 – L’approccio meshless con il Metodo delle Celle
Figura 4.17. Errore medio rispetto al passo di griglia per le implementazioni con 4,5 e 8 nodi satellite
relativamente alla griglia regolare di punti, va rilevata la sostanziale equivalenza
delle soluzioni ottenute utilizzando 4 e 5 satelliti, per le quali si ottengono gli
stessi valori di scarto quadratico medio; l’uso di una costellazione composta di 8
satelliti registra invece, a parità di ordine di convergenza ottenuto, un aumento
di precisione.
4.3.2 Sistemi piani deformabili
Nei paragrafi seguenti verrà illustrata l’estensione all’ambito dello studio dei corpi deformabili in regime di piccoli spostamenti dell’approccio meshless ad interpolazione locale polinomiale descritto in precedenza.
Si consideri dunque un sistema elastico piano di geometria nota; sia il materiale omogeneo e isotropo e caratterizzato da comportamento elastico lineare con
modulo di elasticità E e modulo di contrazione trasversale ν. Il corpo sia assoggettato a un sistema di forze e di vincoli, noti, tali da generare uno stato piano
di sollecitazione (di sforzo oppure di deformazione). Posizionati all’interno della
geometria del corpo un certo numero di punti (“nodi”) riferiti ad un riferimento
cartesiano globale, lo scopo é determinare le componenti del vettore spostamento
in ciascuno punto.
106
4.3 – Interpolazione locale con funzioni polinomiali
La chiave del metodo è la scrittura del bilancio delle forze ad ogni nodo: definita
una regione tributaria Ωi associata ad ogni nodo i, si impone l’equivalenza tra le
forze di volume BΩi agenti su tale regione e le forze di superficie T∂Ωi agenti sul
suo contorno ∂Ωi :
X−
→
−
→
B Ωi +
T ∂Ωi = 0
(4.45)
L’equazione, vettoriale, contempla le componenti delle varie forze riferite al sistema di riferimento cartesiano globale.
Considerato un generico nodo Pp interno al dominio si individui, tra in nodi
prossimi, una costellazione di nodi satellite Si ; per semplicità di illustrazione si
assumerà nel seguito che la costellazione sia composta da 5 satelliti; si adotti inoltre un sistema di riferimento cartesiano locale con origine nel nodo polo e assi
paralleli al sistema di riferimento globale
4.3.2.1 Interpolazione locale
Nell’intorno del nodo polo il campo degli spostamenti viene approssimato con
(
u(x,y) = a1 + a3 x + a5 y + a7 x2 + a9 xy + a11 y 2
v(x,y) = a2 + a4 x + a8 x2 + a6 y + a10 xy + a12 y 2
(4.46)
4.3.2.2 Deformazioni
Le componenti del tensore delle deformazioni vengono ricavate tramite le opportune derivate delle componenti dello spostamento:
∂u
∂x
ε
x
∂v
εy
=
∂y
γx,y
µ
¶
1 ∂u ∂v
+
2 ∂y ∂x
a9 y + 2 a7 x + a3
2
a
2
y
+
a
x
+
a
1
10
6
=
2
a
y
+
a
y
+
a
x
+
2
a
x
+
a
+
a
10
9
8
5
4
11
2
107
(4.47)
4 – L’approccio meshless con il Metodo delle Celle
4.3.2.3 Sforzi
Per un materiale isotropo a comportamento elastico lineare il legame tra sforzi e
deformazioni è descritto dalla relazione lineare:
1
ν
0
εx
σx
E ν 1
0 ε
σy
=
(4.48)
y
(1 − ν)
1 − ν2
τx,y
γx,y
0 0
2
da cui, tramite le (4.47)
E
(a
sin
θ
R
+
2
a
cos
θ
R
+
a
)
ν
E
(2
a
sin
θ
R
+
a
cos
θ
R
+
a
)
9
7
3
12
10
6
+
2
2
1
−
ν
1
−
ν
σx ν E (a sin θ R + 2 a cos θ R + a ) E (2 a sin θ R + a cos θ R + a )
9
7
3
12
10
6
σy =
+
1 − ν2
1 − ν2
τx,y
(1
−
ν)
E
(2
a
sin
θ
R
+
a
sin
θ
R
+
a
cos
θ
R
+
2
a
cos
θ
R
+
a
+
a
)
11
10
9
8
5
4
2
4 (1 − ν )
(4.49)
4.3.2.4 Bilancio delle forze al nodo
Come fatto in precedenza si assume come regione tributaria del nodo polo una
circonferenza di centro il polo stesso e di raggio R; il valore di R è di principio
arbitrario, e viene qui assunto pari alla metà del valore medio della distanza di
nodi satellite dal polo [66]. Va qui ricordato che in presenza di forze di volume,
le regioni tributarie devono coprire, nel loro insieme, l’intero dominio studiato;
in caso contrario, laddove restino dei “buchi”, parte dei carichi, non venendo
raccolta da alcuna regione tributaria e non venendo quindi computata in alcun
bilancio, resterebbe trascurata.
Per un nodo interno la regione tributaria si estenderà appieno attorno al nodo; se
il nodo giace invece sul contorno del solido in esame, la regione tributaria sarà la
sola parte del cerchio contenuta nel solido.
Per esprimere le componenti delle forze di superficie e agenti sul contorno
della regione tributaria risulta conveniente adottare un riferimento in coordinate
polari centrate nel nodo polo e con asse principale parallelo e concorde con l’asse
delle ascisse del riferimento globale. Si ha, evidentemente:
(
x = ρ cos θ
(4.50)
y = ρ sin θ
108
4.3 – Interpolazione locale con funzioni polinomiali
In questo riferimento polare locale le componenti del tensore degli sforzi divengono:
σx =
E (a9 sin θ R + 2 a7 cos θ R + a3 ) ν E (2 a12 sin θ R + a10 cos θ R + a6 )
+
1 − ν2
1 − ν2
(4.51)
σy =
ν E (a9 sin θ R + 2 a7 cos θ R + a3 ) E (2 a12 sin θ R + a10 cos θ R + a6 )
+
1 − ν2
1 − ν2
(4.52)
(1 − ν) E (2 a11 sin θ R + a10 sin θ R + a9 cos θ R + 2 a8 cos θ R + a5 + a4 )
4 (1 − ν 2 )
(4.53)
La risultante delle forze di superficie agenti sul contorno della regione tributaria si ottiene integrando opportunamente le tensioni:
Z 2π
R (σx cos θ + τ sin θ) dθ
(4.54)
Fx =
0
Z 2π
Fy =
R (σy sin θ + τ cos θ) dθ
(4.55)
τ =
0
da cui:
Fx = [(2 a11 − 3 a10 ) ν − 8 a7 − 2 a11 − a10 ]
Fy = − [(3 a9 − 2 a8 ) ν + a9 + 2 a8 + 8 a12 ]
E
π R2
− 1)
(4.56)
E
π R2
− 1)
(4.57)
4 (ν 2
4 (ν 2
Nodo di bordo: la regione tributaria del nodo polo deve essere interna al dominio studiato. Per questa ragione, quando il nodo polo giaccia sul bordo, la sua regione tributaria non lo circonderà completamente, ma solamente per quella parte
che risulta interna al dominio.(figura 4.14).
4.3.2.5 Test sulla trave di Timoshenko
L’indagine sulla precisione dell’implementazione è stata condotta relativamente
al problema della trave di Timoshenko, per il quale si dispone di una soluzione
analitica di confronto.
109
4 – L’approccio meshless con il Metodo delle Celle
Due differenti test sono stati condotti relativamente allo stesso problema utilizzando una costellazione locale composta da 4 e da 8 satelliti (ossia una costellazione composta da 5 o da 9 nodi).
Geometria, proprietà materiali e carico usati nel test numerico sono riportati in
tabella (4.5); per riprodurre con esattezza le condizioni di validità della soluzione
teorica, su tutti i punti del contorno sono stati imposti i valori di spostamento
previsti dalle equazioni (4.13) nella posizione corrispondente. Come metrica di
precisione è stato considerato il valore quadratico medio del modulo della differenza (vettoriale) tra spostamento numerico e spostamento teorico in ciascuno
dei punti non vincolati:
sP £
2
2¤
N i (ui,num − ui,t ) + (vi,num − vi,t )
δ =
(4.58)
Ni
avendo indicato con
• Ni il numero dei nodi interni (dunque non vincolati, e per cui ha senso il
confronto con la soluzione teorica);
• con u e con v le componenti del vettore spostamento secondo la direzione x
e y, rispettivamente, del sistema di riferimento globale;
• con il pedice num un valore di soluzione numerica;
• con il pedice t un valore di soluzione teorica;
Il calcolo è stato condotto distribuendo dei punti all’interno del dominio secondo
una griglia regolare equispaziata; i valori di δ al variare del passo di griglia sono
riportati in tabella (4.6) e, in scala logaritmica, in figura (4.18).
parametro
L
D
E
ν
P
passo di
griglia
valore unità di misura
8
2
1e3
0.25
2
m
m
GPa
N
1
– 0.5
0.25
0.125
errore medio δ
4 satelliti
8 satelliti
5.88E-004
5.3751E-004
4.865E-004
4.7666E-004
4.78E-004
4.34E-004
4.24E-004
Tabella 4.6. Valore dell’errore
medio δ per i punti interni al dominio al variare del passo della
griglia di punti
Tabella 4.5. Parametri descrittivi il
problema della trave di Timoshenko usato per il confronto numerico
110
4.4 – Interpolazione locale con funzioni di base radiale
Figura 4.18. Test della trave di Timoshenko: errore medio rispetto al passo di griglia in scala logaritmica con approccio CM meshless a interpolazione polinomiale.
A scopo esemplificativo della generalità dell’approccio, si riportano in figura (4.19) e (4.20) le immagini raffiguranti il campo di spostamenti ottenuto con
una distribuzione casuale di punti; la distribuzione dei punti è stata ottenuta
con variazioni di posizionamento casuali compatibili con la geometria applicate ad una griglia equispaziata di partenza. Va osservato che, variando la distanza
media locale dei punti nelle costellazioni man mano create, una condizione del
genere non si presti a confronti numerici sistematici, mancando un parametro di
qualificazione attendibile della densità dei punti18 .
4.4 Interpolazione locale con funzioni di base radiale
Nel paragrafo precedente è stata presentato un approccio meshless che, muovendo da alcune considerazioni attorno all’equazione di bilancio sulle regioni tributarie associate ad ogni nodo, costruisce un sistema algebrico risolvente senza
richiedere la costruzione di una mesh, nemmeno a livello locale: fissata l’attenzione su un nodo, si individua un opportuno gruppo di nodi circostanti; con questo
18
manca qui una dimensione rappresentativa della “dimensione di cella” e la distanza media dei satelliti dal polo è risultato essere un parametro con fluttuazioni eccessive per risultare
attendibile, in misura tanto più marcata all’aumentare della distorsione della distribuzione dei
punti
111
4 – L’approccio meshless con il Metodo delle Celle
Figura 4.19. Test della trave di Timoshenko: distribuzione casuale di punti generata dalla griglia regolare equisispaziata
Figura 4.20. Test della trave di Timoshenko: campo di spostamenti ottenuto su una distribuzione casuale dall’approccio meshless CM ad interpolazione polinomiale
insieme di punti si definisce una interpolazione polinomiale dei valori nodali della variabile di configurazione del campo studiato; la regione tributaria del nodo
in esame viene definita attorno a ciascun nodo, e, per semplicità di espressione
formale dell’equazione di bilancio, viene assunta con una forma geometrica regolare e semplice; le grandezze coinvolte nell’equazione di bilancio sono ricavate
tramite le leggi costitutive e le equazioni di struttura a partire da una funzione
che interpola i valori nodali della variabili di configurazione.
Il vantaggio di questo approccio è indubbiamente quello di non richiedere alcuna definizione, nemmeno a livello locale, di connettività tra i punti: non occorre
ordinare i nodi per costruire un set di celle che condividano tutte il nodo in esame, né è necessario alcun controllo circa la qualità delle celle locali così create
112
4.4 – Interpolazione locale con funzioni di base radiale
per escludere eventuali celle distorte. Un ultimo vantaggio rispetto alla formulazione meshless basata sulla creazione di una mesh locale, ha a che fare con
la copertura del dominio ottenuta con l’insieme delle regioni tributarie locali: in
presenza di sorgenti distribuite (sorgenti di calore distribuite, forze di volume, ...)
è infatti necessario che l’insieme delle regioni tributarie definite localmente copra
l’intero dominio, in modo che nessuna sua porzione (e dunque nessun termine
sorgente) venga tralasciata. Questo aspetto non è banale quando le regioni tributarie di nodo siano definite dagli elementi locali di un complesso primale locale.
L’interpolazione polinomiale locale, invece, usa una regione tributaria svincolata
dalla disposizione della costellazione di punti individuata; in particolare essendo
completamente libera l’estensione della regione tributaria, la copertura dell’intero dominio è “controllabile”.
A fronte di questi vantaggi, l’interpolazione locale dei valori nodali con una
funzione polinomiale ha però due fondamentali inconvenienti:
• il numero di nodi che compongono la costellazione è fisso, dipendendo
dal polinomio adottato, e non può venire variato che per intervalli fissati; si perde in questo modo la possibilità di migliorare l’approssimazione
arricchendo la costellazione dei nodi in dipendenza di fattori locali;
• la disposizione geometrica dei punti scelti non è sempre compatibile con
una accettabile accuratezza della interpolazione: la matrice di interpolazione (o di collocazione) può risultare singolare per particolari disposizioni dei
nodi della costellazione, rendendo laboriosa la scelta dei punti “adatti”.
Rispetto a queste limitazioni una possibile soluzione proviene dalla adozione
delle Funzioni di Base Radiale (RBF) per l’interpolazione locale delle variabili di
configurazione.
Le RBF, introdotte per risolvere problemi di interpolazione multidimensionali,
costruiscono la funzione approssimante come combinazione lineare di un certo
numero di funzioni che hanno come argomento reale positivo.
Si immagini che della funzione (incognita):
f : Rn −→ R
(4.59)
siano noti solo N valori in altrettanti punti del suo dominio
f (xi ) = di
xi ∈ Rn ,i = 1, . . . N
(4.60)
Si desidera individuare una funzione y definita in Rn a valori reali che approssimi
la funzione incognita f , assumendo i valori noti nei punti dati:
y : Rn −→ R : y (xi ) = dp
113
i = 1, . . . ,N
(4.61)
4 – L’approccio meshless con il Metodo delle Celle
L’idea delle RBF è quella di costruire la funzione approssimante y come somma di N valori assunti da una funzione reale di argomento la norma kx − xi k:
y (x) =
P
X
wi φ (kx − xi k)
(4.62)
i=1
dove
• wi ∈ R sono detti pesi;
• xi , punti in cui sono noti gli N valori di , sono detti centri;
• φ (r) è una funzione a valori reali definita in R+ ;
Circa la funzione φ (r) va precisato che le funzioni solitamente utilizzate sono:
• la funzione spline
φ (r) = rn
con n dispari
• la funzione thin plate spline
φ (r) = rn log r
con n pari
• la funzione gaussiana
r2
φ (r) = e 2σ 2
−
σ > 0;
• la funzione multiquadratica inversa
µ
φ (r) =
1
2
r + σ2
¶1/2
σ > 0;
• la funzione multiquadratica
¡
¢1/2
φ (r) = r2 + σ 2
σ > 0;
La funzione gaussiana e la funzione multiquadratica sono dette “funzioni localizzate” per esprimere il fatto che tendono a zero al tendere dell’argomento a
infinito; il comportamento contrario (φ (r) → 0 per r → ∞) della funzione multiquadratica viene descritto con l’appellativo “non locale”.
114
4.4 – Interpolazione locale con funzioni di base radiale
Assunta una funzione φ, per determinare i valori degli N coefficienti wi si utilizza
la condizione di interpolazione:
y (xi ) = dp
ottenendo il sistema lineare:
φ (r1,1 ) φ (r1,2 )
φ (r2,1 ) φ (r2,2 )
φ (r3,1 ) φ (r3,2 )
...
...
φ (rn,1 ) φ (rn,2 )
φ (r1,3 )
φ (r2,3 )
φ (r3,3 )
...
φ (rn,3 )
...
...
...
...
...
i = . . . ,N
(4.63)
φ (r1,n )
w
d1
1
φ (r2,n )
w
d
2
2
φ (r3,n ) w3 =
d3
...
. . .
. . .
φ (rn,n )
wn
dn
(4.64)
avendo inteso indicare ri,j = kxj − xi k; con evidente significato della notazione
il sistema può scriversi in forma sintetica come:
Φw = d
(4.65)
La matrice Φ è una matrice quadrata di dimensione N xN ed è detta matrice di
interpolazione. Si può dimostrare 19 che esiste una una classe C di funzioni di base
radiale (che include la funzione gaussiana e le funzioni multiquadratiche) per
cui se i punti di interpolazione x1 , x2 , . . . , xp ∈ RM sono distinti, la matrice di
interpolazione Φ è non singolare.
Inoltre per la funzione gaussiana20 e per la funzione multiquadratica inversa, la
matrice di interpolazione risulta anche essere definita positiva.
Dal punto di vista dell’applicazione qui trattata i principali vantaggi dell’adozione delle RBF per interpolare localmente i valori delle variabili di configurazione ai nodi della costellazione sono:
• stabilità del problema di interpolazione rispetto alla disposizione spaziale
dei punti della costellazione per un’opportuna scelta delle funzioni di base
radiale φ;
• indipendenza dal numero di nodi che compone la costellazione locale (la
funzione interpolante è somma delle singole funzioni di base radiale centrate nei vari punti della costellazione: questa natura additiva della interpolazione rende assolutamente libero e variabile di volta in volta il numero
dei nodi scelti per comporre la costellazione locale);
• indipendenza dalle dimensioni del problema.
19
20
cfr. [67]
cfr. [68]
115
4 – L’approccio meshless con il Metodo delle Celle
L’idea di usare le RBF per l’interpolazione locale viene da quanto proposto in letteratura per metodologie meshless differenziali([69],[70],[71]); molta letteratura
sull’argomento, oltre che in ambito speculativo circa le loro proprietà matematiche ([72],[73]), viene da ambiti applicativi quale la manipolazione di immagini
[74] e lo sviluppo di reti neurali [75] dove alcuni aspetti funzionali vengono affrontati con la concettualizzazione di problema di curve fitting.
Nei paragrafi seguenti verranno illustrate le applicazioni dell’interpolazione con
RBF all’implementazione meshless del metodo delle celle: nella sostanza la procedura è del tutto identica a quella presentata per l’interpolazione polinomiale, con
le uniche differenze, di carattere puramente implementativo, legate alla diversa
costituzione della funzione interpolante
4.4.1 Interpolazione RBF di campi scalari
In questo paragrafo verrà presentata l’applicazione della interpolazione con le
Funzioni di Base Radiale (RBF) nell’approccio meshless del Metodo delle Celle
applicato ai problemi di conduzione termica in regime stazionario. La procedura
è, come precisato in precedenza, assolutamente simile a quella seguita a proposito dell’interpolazione polinomiale.
Assunto un dominio di geometria e proprietà (conduttività termica k ) note, si
provveda a posizionarvi all’interno un conveniente numero di punti, di seguito
denominati “nodi”. La posizione di questi punti verrà riferita ad un sistema di
riferimento cartesiano esterno XOY .
Preso in esame un nodo interno generico (chiamato convenzionalmente “nodo
polo”), si selezionino NC nodi prossimi disposti attorno al nodo polo: questi nodi
selezionati prenderanno il nome di “nodi satellite” e , assieme al nodo polo, costituiranno la costellazione locale C di punti con cui verrà approssimato localmente
il campo delle temperature attorno al nodo polo.
4.4.1.1 Interpolazione
Nella regione circostante il nodo polo, il campo delle temperature viene approssimato interpolando i valori nodali di temperatura della costellazione C con la
funzione:
NC
X
wi,C φ (kP − Pi k)
(4.66)
T (P )C =
i=1
Per comodità implementativa verrà adottato un sistema di riferimento locale ottenuto traslando il sistema globale in modo tale da posizionarne l’origine nel
116
4.4 – Interpolazione locale con funzioni di base radiale
nodo polo. Come funzione di base radiale φ (r) si adotti, a scopo puramente
esemplificativo, la funzione:
¡
¢2
φ (r) = 1 − r2 ;
(4.67)
essendo r la distanza euclidea rispetto al nodo polo.
Le condizioni di interpolazione permetteranno di esprimere i pesi wi in termini
di temperature nodali ti avendosi (cfr. equazione (4.64)) il sistema di equazioni
lineari:
Φ C w C = TC
(4.68)
da cui:
wC = Φ−1
C TC
(4.69)
La funzione approssimante è “appoggiata” ai valori nodali (incogniti) delle temperatura e i coefficienti wC dell’interpolazione sono espressi, a meno della matrice
ΦC che contiene le informazioni sulla disposizione geometrica dei punti della costellazione, in termini del vettore delle temperature nodali TC .
La procedura, come per il caso dell’interpolazione polinomiale, esprimerà il vettore gradiente, derivando la funzione T (P ) ed esprimerà il vettore flusso di calore
unitario tramite la legge costitutiva del materiale; infine, definita una regione tributaria attorno al nodo polo, il flusso di calore uscente attraverso la sua superficie
di contorno sarà calcolato con un integrale di superficie della funzione che esprime il vettore flusso unitario.
Questo processo calcola un valore scalare (il flusso netto di calore uscente dalla
superficie ∂ΩP di confine della regione tributaria ΩP del nodo polo P ) elaborando
la funzione che esprime il campo locale delle temperature attorno al polo; poiché
gli operatori matematici che intervengono in questo processo (derivazione, integrazione,e operazioni algebriche) sono lineari, ne consegue che l’intero processo
che calcola il flusso netto attraverso ∂ΩP dalla funzione T (x,y) è anch’esso lineare. Se dunque la funzione T (x,y) viene espressa come somma di funzioni
componenti Ti , il flusso totale Q può venire calcolato sommando i valori Qi ottenuti applicano il processo ad ogni singola funzione addenda Ti .
Alla luce di questa considerazione tratteremo di seguito una sola delle funzioni
che compongono la funzione approssimante, corrispondente alla funzione
£
¤2
¡
¢2
(4.70)
Ti (x,y) = wi,C 1 − r2 = wi,C 1 − (x − xi)2 + (y − yi)2
centrata nel nodo generico i della costellazione C
Le componenti del vettore gradiente della temperatura21 gC in un punto P (x,y)
sono esprimibili in forma analitica derivando la funzione di interpolazione locale
21
il pedice C si rende necessario riferendosi all’interpolazione locale della costellazione C
117
4 – L’approccio meshless con il Metodo delle Celle
Ti (x,y):
gx =
£
¤
∂Ti (x,y)
= −4 1 − (y − yi )2 − (x − xi )2 (x − xi ) wi,C
∂x
£
¤
∂Ti (x,y)
gy =
= −4 1 − (y − yi )2 − (x − xi )2 (y − yi ) wi,C
∂y
(4.71)
Il flusso unitario di calore q è correlato con il vettore gradiente delle temperature
a meno della conducibilità termica k del mezzo22 :
qC = −kgC .
(4.72)
Nell’intorno del polo Pp il calore che attraversa una superficie orientata S di
versore normale n è dunque esprimibile come:
Z
Z
(qx nx + qy ny ) dS
(4.73)
q nC dS =
QS =
S
S
Definita una regione tributaria ΩP attorno al nodo polo delimitata dalla superficie chiusa ∂ΩP , il bilancio di nodo impone l’equivalenza tra il flusso netto di
calore uscente attraverso la superficie Q∂ΩP e il calore generato QΩP all’interno
del volume da essa racchiuso:
QΩP = Q∂ΩP
essendo:
(4.74)
Z
Q∂ΩP = −k
∂ΩP
(gx nx + gy ny ) dS = QΩP .
(4.75)
4.4.1.2 Bilancio al nodo polo
Attorno al nodo polo consideriamo come regione tributaria un quadrato di lato
2d con baricentro corrispondente al polo stesso; il valore di 2d è arbitrario, e viene
qui assunto pari alla metà della distanza media dei nodi satellite dal nodo polo.
Non appare superfluo ricordare che in presenza di sorgenti distribuite occorre
che l’insieme delle regioni tributarie costruite attorno ai vari punti, di volta in
volta considerati come “poli” di una costellazione locale, copra l’intero dominio.
Il calcolo dei flussi di calore attraverso ogni lato della regione tributaria risulta
così semplificato. Con riferimento alla figura (4.21) si ha infatti, essendo t lo spessore del sistema piano, che per il lato AB il vettore area corrispondente risulta
22
si suppone qui per semplicità che il mezzo abbia comportamento isotropo
118
4.4 – Interpolazione locale con funzioni di base radiale
essere S1 = {2td, 0} da cui:
Z d
Qi,1 = −kt
gx (d,y)dy
−d
(24 d xi − 24 d2 ) yi 2 + 24 d xi 3 − 72 d2 xi 2 + (80 d3 − 24 d) xi − 32 d4 + 24 d2
3
(4.76)
calcolando i termini:
Z
=
d
Qi,2 = −kt
gy (x,d)dx
−d
Z
d
Qi,3 = kt
gx (−d,y)dy
−d
Z
(4.77)
d
Qi,4 = kt
gy (x, − d)dx
−d
conformemente all’orientazione delle singole superfici. Sommando i contributi
di flusso calcolati per tutte e quattro le superfici si ottiene:
Qi,∂ΩP = Qi,1 + Qi,2 + Qi,3 + Qi,4
·
¸
32d2 (6yi2 + 6x2i + 4d2 − 3)
= −kt
wi
3
(4.78)
= ai,P wi
Il termine appena calcolato esprime il contributo della funzione radiale di centro
i al flusso di calore Q∂ΩP attraverso la superficie di contorno della regione tributaria ΩP del nodo P assunto come polo. Considerando i contributi delle funzioni
radiali di centro tutti i nodi della costellazione C, si ha pertanto:
w1
£
¤ w2
= aP wC
(4.79)
Q∂ΩP = a1,P a2,P . . . aN,P
. . .
wN
e dunque, ricordando la (4.69):
Q∂ΩP = aP Φ−1
C TC
(4.80)
che esprime il flusso netto attraverso la superficie di contorno della regione tributaria del nodo polo in funzione delle temperature dei nodi che compongono la
costellazione. Il vettore
kP = aP Φ−1
(4.81)
C
119
4 – L’approccio meshless con il Metodo delle Celle
Figura 4.21.
Regione tributaria quadrata attorno al generico nodo interno P
contiene i valori da collocare nella matrice fondamentale K del sistema che esprime la soluzione del problema
KT = Q
(4.82)
alla riga corrispondente all’identificativo del nodo polo nella numerazione globale. Le colonne in cui gli elementi di kP vanno collocati corrispondono alle colonne
di indice pari al numero identificativo di ogni singolo nodo della costellazione,
nella numerazione globale.
4.4.1.3 Alcuni test numerici
Al fine di verificarne l’accuratezza, l’approccio descritto è stato applicato alla soluzione della equazione di Laplace ∇2 (w) = 0 su un domino piano quadrato di
lato unitario centrato nell’origine di un sistema di riferimento cartesiano con assi
paralleli ai lati; nel dominio sono stati posizionati dei punti secondo una griglia
regolare, facendo in modo di avere un punto in ogni vertice e un certo numero di
punti posizionati lungo ciascun lato.
Sui punti del contorno sono stati imposti i valori assunti dalla funzione armonica:
wt (x,y) = ex cos y
120
(4.83)
4.4 – Interpolazione locale con funzioni di base radiale
soluzione del problema.
Come parametro di valutazione della precisione della soluzione numerica, viene
utilizzato il valore
s
PNi
2
i=1 (wt,i − wi )
δ =
(4.84)
Ni
essendo Ni il numero di nodi interni (quelli su cui non sono stati imposti i valori della funzione soluzione del problema), wt,i il valore assunto dalla soluzione
teorica nel punto i e wi il valore ottenuto dalla soluzione numerica nello stesso
punto.
Il problema così posto è stato risolto con la procedura meshless con interpolazione RBF sopra descritta, implementata con riferimento a quattro diverse funzioni
di base radiale φ (r):
¡
¢2
φA = 1 − r 2
¡
¢
φB = 1 − r 4
(4.85)
2
φC = e−r /4
√
φD = 2 + r 2
no satelliti
3
4
5
6
7
8
δ(φA )
δ(φB )
δ(φC )
δ(φD )
1.456290
0.329283
0.299443
0.161390
0.079458
0.000139
0.913340
0.001377
0.002011
0.001490
0.000898
0.000142
0.075073
0.000062
0.000075
0.000068
0.000065
0.000050
0.011741
0.000048
0.000025
0.000022
0.000022
0.000031
Tabella 4.7. Interpolazione con RBF: scarto quadratico medio δ per il passo griglia pari a 1/4 per le varie funzioni di base radiale in dipendenza del
numero dei satelliti della costellazione
Un test preliminare ha riguardato la sensibilità della soluzione rispetto al numero di nodi utilizzati nella costellazione. Assunta una distribuzione di punti
regolare con passo di riferimento pari a 1/4 del lato, si è valutato il parametro di
precisione δ al variare del numero di nodi della costellazione tra 4 e 9 per ciascuna delle funzioni φ adottate. I risultati, esposti in tabella (4.7) e rappresentati in
figura (4.22), evidenziano come, per le funzioni di base radiale B,C e D ci sia una
sostanziale stabilità rispetto alla numerosità della costellazione adottata; per la
funzione di base radiale A, al contrario, per ottenere accuratezze paragonabili a
121
4 – L’approccio meshless con il Metodo delle Celle
Figura 4.22. Interplazione meshless con RBF: errore quadratico medio
al variare del numero dei satelliti con le varie funzioni di base radiale e
passo di griglia pari a 1/8
quelle proprie delle altre tre funzioni e stabili rispetto all’aggiunta di un ulteriore
nodo nella costellazione, il numero dei satelliti deve essere di almeno 8.
I dati di tabella (4.8), riportati nel grafico di figura (4.23), riportano invece il
valore di δ al variare del passo p della griglia di punti nelle loro disposizione
regolare di origine.
lato
0.5
0.25
0.125
0.0625
0.03125
δ(φA )
δ(φB )
δ(φC )
δ(φD )
0.009267
0.002386
0.000583
0.000143
0.000035
0.006156
0.001551
0.000400
0.000096
0.000024
0.004561
0.000815
0.000175
0.000034
0.000010
0.004013
0.000603
0.000118
0.000022
0.000001
Tabella 4.8. Meshless con interpolazione RBF: scarto quadratico medio δ
al variare del passo griglia per le varie funzioni di base radiale con costellazione composta da 8 satelliti
122
4.4 – Interpolazione locale con funzioni di base radiale
Figura 4.23. Meshless con interpolazione RBF: scarto quadratico medio al variare
del lato, in scala logaritmica, per le quattro funzioni di base radiale
4.4.2 Interpolazione RBF di campi vettoriali
In questo paragrafo verrà presentata l’applicazione della interpolazione con le
Funzioni di Base Radiale (RBF) nell’approccio meshless del Metodo delle Celle applicato allo studio della deformazione di sistemi elastici piani in regime di
piccoli spostamenti. La procedura è assolutamente simile a quella seguita utilizzando l’interpolazione polinoamiale.
Assunto un dominio di geometria e proprietà (modulo di elasticità E e coefficiente di Poisson ν ) note, si provveda a posizionarvi all’interno un conveniente
numero di punti, di seguito denominati “nodi”. La posizione di questi punti verrà riferita ad un sistema di riferimento cartesiano esterno XOY .
Preso in esame un nodo interno generico (chiamato convenzionalmente “nodo
polo”), si selezionino NC di nodi prossimi disposti attorno al nodo: questi nodi
selezionati prenderanno il nome di “nodi satellite”, e, assieme al nodo polo, costituiranno la costellazione locale C di punti con cui verranno approssimati localmente i campi scalari delle componenti del vettore spostamento attorno al nodo
polo.
123
4 – L’approccio meshless con il Metodo delle Celle
4.4.2.1 Interpolazione
Le componenti del campo degli spostamenti costituiscono due campi scalari che
verranno approssimati con funzioni di base radiale centrate nei nodi della costellazione. Adottando per semplicità di espressione formale, e senza che questo
comporti perdita di generalità, un riferimento cartesiano locale xPP y ottenuto
traslando l’origine del sistema globale nel nodo polo:
ux,y =
NC
X
wiu,C φ (ri )
i=1
vx,y =
NC
X
(4.86)
wiv,C φ (ri )
i=1
essendo ri il modulo del vettore posizione del punto P = (x,y) dal nodo Pi della
costellazione C:
q
ri = kP − Pi k =
(x − xi )2 + (y − yi )2
(4.87)
Come funzione di base radiale φ si adotterà, a scopo di illustrazione, la funzione:
¡
¢2
φ (ri ) = 1 − ri2
(4.88)
I pesi delle due interpolazioni RBF vengono espressi in termini componenti nodali del vettore spostamento (che costituiscono l’incognita del problema)
applicando la condizione di interpolazione, e ottenendo i sistemi di equazioni
lineari:
Φ C wC = u C
(4.89)
da cui:
wC = Φ−1
C uC
(4.90)
dove si sono raccolti le componenti di spostamento nodale e i pesi nei vettori:
w1u
u1
w
v
1v
1
w2u
u2
(4.91)
wC =
uC =
...
. . .
wN u
uN
vN v
vN
avendosi quindi:
φ (r1,1 )
0
φ (r1,2 )
0
0
φ (r1,1 )
0
φ (r1,2 )
·
·
·
ΦC =
φ (rN,1 )
0
φ (rN,2 )
0
0
φ (rN,1 )
0
φ (rN,2 )
124
···
···
···
···
0
φ (r1,N )
···
φ (rN,N )
0
0
φ (rN,N )
φ (r1,N )
0
(4.92)
4.4 – Interpolazione locale con funzioni di base radiale
Come per il caso dell’interpolazione polinomiale, le componenti dello spostamento verranno opportunamente derivate per esprimere le componenti del
tensore delle deformazioni con cui, a mezzo della legge costitutiva del materiale, verranno espresse le componenti del tensore degli sforzi; definita una regione
tributaria attorno al nodo polo, le componenti della forza risultante agente sulla
sua superficie di contorno sarà calcolata integrando opportunamente il prodotto
del tensore σ per il versore normale alla superficie n.
Questo processo calcola due valori scalari (le componenti della forza netta agente
sulla superficie ∂ΩP di confine della regione tributaria ΩP del nodo polo P ) elaborando le funzioni che esprimono i campi locali delle componenti di spostamento
nell’intorno del polo; poiché gli operatori matematici che intervengono in questo processo (derivazione, operazioni algebriche e integrazione) sono lineari, ne
consegue che l’intero processo è anch’esso lineare. Se dunque la funzione u (x,y)
viene espressa come somma di funzioni componenti ui , la forza totale F∂Ω può
venire calcolata sommando i valori Fi,∂Ω ottenuti applicando il processo ad ogni
singola funzione addenda ui .
Alla luce di questa considerazione tratteremo di seguito una sola delle funzioni
che compongono la funzione approssimante:
¡
¢2
£
¤2
ui (x,y) = wiu,C 1 − ri2 = wiu,C 1 − (x − xi)2 + (y − yi)2
(4.93)
¡
¢2
£
¤2
vi (x,y) = wiv,C 1 − ri2 = wiv,C 1 − (x − xi)2 + (y − yi)2
centrata nel nodi generico i della costellazione C
4.4.2.2 Deformazioni
Le componenti del tensore delle deformazioni vengono ricavate direttamente
tramite le opportune derivate delle componenti dello spostamento:
∂u
∂x
εx
∂v
εy
=
∂y
γx,y
µ
¶
∂v
1
∂u
+
2 ∂y ∂x
(4.94)
¡
¢
−4 (x − xi ) −(y − yi )2 − (x − xi )2 + 1 wiu
¡
¢
2
2
−4 (y − yi ) −(y − yi ) − (x − xi ) + 1 wiv
=
¡
¢
2
2
−4
(x
−
x
)
−(y
−
y
)
−
(x
−
x
)
+
1
wiu +
i
i
i
¡
¢
2
2
− 4 (y − yi ) −(y − yi ) − (x − xi ) + 1 wiv
125
4 – L’approccio meshless con il Metodo delle Celle
4.4.2.3 Sforzi
Per un materiale isotropo a comportamento elastico lineare il legame tra sforzi e
deformazioni è come noto descritto dalla relazione lineare:
1 ν
0
εx
σx
E ν 1
0 ε
σy
(4.95)
=
y
2
(1
−
ν)
1−ν
γx,y
τx,y
0 0
2
da cui, tramite le (4.94)
£
¤
4 ν (y − yi ) 1 − (y − yi)2 − (x − xi )2 E
σx = − wiv
+
1 − ν2
£
¤
4 (x − xi ) 1 − (y − yi )2 − (x − xi )2 E
− wiu
1 − ν2
£
¤
4 (y − yi ) 1 − (y − yi )2 − (x − xi )2 E
σy = − wiv
+
1 − ν2
£
¤
4 ν (xu − xi ) 1 − (yu − yi )2 − (xu − xi )2 E
− wiu
1 − ν2
£
¤
4 (x − xi ) 1 − (y − yi )2 − (x − xi )2 (1 − ν) E
τx,y = wiv
+
2 (1 − ν 2 )
£
¤
4 (y − yi ) 1 − (y − yi )2 − (x − xi )2 (1 − ν) E
− wiu
2 (1 − ν 2 )
(4.96)
4.4.2.4 Bilancio delle forze al nodo
Non appare superfluo ricordare che in presenza di sorgenti distribuite occorre
che l’insieme delle regioni tributarie costruite attorno ai vari punti, di volta in
volta considerati come “poli” di una costellazione locale, copra l’intero dominio.
Come regione tributaria del nodo polo si assuma un quadrato di lato 2d con
baricentro corrispondente al polo stesso; la dimensione del lato è, come detto in
precedenza, assolutamente arbitraria, e verrà qui assunto convenzionalmente pari al valore della distanza media dei nodi satellite del nodo polo [66]; va ricordato
però che in presenza di sorgenti distribuite (forze di volume), affinchè nessuna
loro porzione venga tralasciata nella scrittura dei bilanci, l’insieme delle regioni
tributarie dei vari nodi deve coprire tutto il dominio in esame, pena l’errato computo delle forze agenti.
Per un nodo interno, la regione tributaria si estenderà appieno attorno al nodo;
se il nodo giace invece sul contorno del solido in esame, la regione tributaria sarà
126
4.4 – Interpolazione locale con funzioni di base radiale
la sola parte del cerchio contenuta nel solido.
Figura 4.24. Costellazione e regione tributaria per il bilancio delle forze
al generico nodo polo PP
Il calcolo delle forze di superficie agenti su ogni lato della regione tributaria risulta così semplificato. La forza F agente su una superficie orientata A è espressa
dalla relazione di Cauchy:
Z
F =
Σ n dA
(4.97)
A
essendo n il versore normale alla superficie e Σ il tensore degli sforzi, qui inteso
nella notazione matriciale:
·
¸
σx τxy
Σ =
.
(4.98)
τxy σy
Con riferimento alla figura (4.24) si ha infatti, essendo t lo spessore del sistema
piano, che per il lato HK che il vettore area corrispondente risulta essere S1 =
{2td, 0} da cui:
Z d
Fx,HK = t
σx (d,y) dy
−d
Z
(4.99)
d
Fy,HK = t
τxy (d,y) dy
−d
127
4 – L’approccio meshless con il Metodo delle Celle
da cui si ottiene
8 [3d (xi − d) yi2 + 3d x3i − 9d2 x2i + (10d2 − 3) d xi − 4d4 + 3d2 ] A
Fx,HK = −
wiv
3 ¤
£¡
¢
+ 8 −d x2i + 2d2 xi − 2d3 + d yi − d yi3 B wiv
£¡
¢
¤
Fx,HK = 8d 1 − x2i + 2dxi − 2d2 yi − yi3 C wiv
8 [3d (xi − d) yi2 + 3d x3i − 9d2 x2i + (10d2 − 3) d xi − 32d4 + 3d2 ] C
−
wiv
3
(4.100)
avendo indicato con
A =
E
1 − ν2
B
=
νE
1 − ni2
C =
E (1 − ν)
.
2 (1 − ν 2 )
(4.101)
Calcolando i contributi relativi agli altri tre lati del quadrato, sommando opportunamente e considerando il contributo di tutte le funzioni φi che compongono l’approssimazione locale del campo degli spostamenti, si perviene all’espressione:
N ½
X
16d2 [(9yi2 + 3x2i + 4d2 − 3) C + (3yi2 + 9x2i + 4d2 − 3) A]
Fx,∂ΩP =
wiu +
3
i=1
ª
+32d2 xi yi (C + B) wiv
Fy,∂ΩP =
N ½
X
µ
2
32d xi yi (C + B) wiu + 16
i=1
µ
+16
3yi2
+
x2i
¶
¾
4 2
2
+ d − 1 d A wiv
3
yi2
+
3x2i
¶
4 2
+ d − 1 d2 C+
3
(4.102)
componenti della forza netta agente sulla superficie di contorno ∂ΩP in equilibrio
con le forze di volume “raccolte” dalla regione tributaria ΩP .
Essendo P l’identificativo del polo nella numerazione globale dei nodi i termini
delle sommatorie andranno riportati nelle righe 2P − 1 (per Fx,∂ΩP ) e 2P (per
Fx,∂ΩP ) alle colonne corrispondenti individuate dagli identificativi dei nodi della
costellazione.
4.4.2.5 Test numerici
Al fine di valutarne la precisione numerica, l’approccio proposto è stato applicato
alla soluzione di un problema di elasticità piana noto come “trave di Timoshenko”.
Geometria, proprietà materiali e carico usati nel test numerico sono riportati in
128
4.4 – Interpolazione locale con funzioni di base radiale
tabella (4.9); per riprodurre con esattezza le condizioni di validità della soluzione
teorica, su tutti i punti del contorno sono stati imposti i valori di spostamento
previsti dalle equazioni (4.13) nella posizione corrispondente. Come metrica di
precisione è stato considerato il valore quadratico medio del modulo della differenza (vettoriale) tra spostamento numerico e spostamento teorico in ciascuno
dei punti non vincolati:
sP £
2
2¤
(u
−
u
)
+
(v
−
v
)
i,num
i,t
i,num
i,t
Ni
δ =
(4.103)
Ni
avendo indicato con
• Ni il numero dei nodi interni (dunque non vincolati, e per cui ha senso il
confronto con la soluzione teorica);
• con u e con v le componenti del vettore spostamento secondo la direzione x
e y, rispettivamente, del sistema di riferimento globale;
• con il pedice num un valore di soluzione numerica;
• con il pedice t un valore di soluzione teorica;
Il calcolo è stato condotto considerando costellazioni locali composte da 8 nodi,
e utilizzando una distribuzione di punti all’interno del dominio secondo una griglia regolare equispaziata; i valori di δ al variare del passo di griglia sono riportati
in tabella (4.10) e, in scala logaritmica, in figura (4.25).
parametro
L
D
E
ν
P
valore unità di misura
8
2
1e3
0.25
2
m
m
GPa
N
lato
δ
1
0.5
0.25
0.125
1.97E-006
4.04E-007
6.59E-008
9.06E-009
Tabella 4.10. Valore dell’errore
medio δ per i punti interni al dominio al variare del passo della
griglia di punti
Tabella 4.9. Parametri descrittivi il problema della trave di Timoshenko usato per il confronto
numerico
129
4 – L’approccio meshless con il Metodo delle Celle
Figura 4.25. Test della trave di Timoshenko: errore medio rispetto al passo di
griglia in scala logaritmica con approccio CM meshless interpolazione RBF.
130
Capitolo 5
Applicazione esplorativa della
formulazione Meshless a celle locali
con il Metodo delle Celle
Nel capitoli precedenti sono stati esplorati alcuni sviluppi basati sul Metodo delle
Celle: la formulazione quadratica per problemi scalari e vettoriali tridimensionali
e alcuni approcci meshless.
Lo sviluppo e la verifica dell’interpolazione quadratica con il CM ha confermato
le potenzialità del Metodo in ambito tecnico–applicativo: gli acclarati vantaggi
propri dalla formulazione discreta diretta alla base del CM (manifesti, ad esempio, nelle applicazioni di elasto-dinamica e nei problemi di frattura) sono disponibili con una implementazione caratterizzata da precisioni di calcolo non inferiori
a quelle raggiungibili dall’affermato Metodo degli elementi Finiti.
Gli approcci meshless proposti aprono peraltro interessanti prospettive: i vantaggi dell’assenza di una fase di mesh (o di remeshing) appaiono accessibili senza le
difficoltà nell’imposizione delle condizioni al contorno e senza i problemi di complesistà formale che affliggono molti degli approcci meshless di tipo differenziale.
Gli studi esplorativi circa le implementazioni meshless assumono particolare interesse nell’ambito della ricerca di una metodologia di analisi automatica del
comportamento meccanico dei segmenti ossei: nell’intento di sviluppare una procedura di modellazione numerica automatizzata basata direttamente sulle immagini cliniche, l’eliminazione della fase di creazione della mesh, operazione attualmente ancora semi–automatica, consentirebbe un significativo passo in avanti nella prospettiva delle applicazioni cliniche.
La verificata equivalenza tra CM e FEM con interpolazione quadratica resta, in
questo ambito, un elemento di carattere accademico, non apportando innovazione o immediatamente percepibili progressi di carattere metodologico nella “filiera” di modellazione basata sui dati diagnostici. In assenza di un guadagno in
131
5 – Applicazione esplorativa della formulazione Meshless a celle locali con il Metodo delle Celle
termini di precisione prevalgono i vantaggi offerti da un metodo consolidato e
per cui sono disponibili svariati strumenti di calcolo avanzati, collaudati e affidabili.
Gli approcci meshless propongono invece un “salto” qualitativo nel processo di
modellizzazione, rendendo idealmente possibile una riduzione del tempo di analisi e un’ulteriore automazione del processo, verificate ovviamente che siano accuratezza, generalità e robustezza, altri requisiti essenziali di cui si è discusso nel
capitolo 3.
In questo capitolo verrà quindi descritta l’applicazione di una metodologia meshless del CM allo studio della deformazione di un segmento osseo in vitro, problema di riferimento per la valutazione di accuratezza del modello in un contesto affine a quello reale sia per complessità geometrica che per comportamento
materiale [76].
L’obiettivo è quello di accertare la validità dell’implementazione nello specifico contesto delle applicazioni di meccanica dell’osso, verificando l’accuratezza
dei risultati rispetto sia alle misure sperimentali che ai valori predetti da un modello FEM accoppiato di riferimento. La prospettiva dello studio è, come detto,
l’applicazione clinica, ambito che impone metodologie di indagine:
• robuste rispetto alle singolarità e agli artefatti della sorgente di informazione circa geometria e prorpietà materiali;
• automatiche nella loro realizzazione, riducendo (idealmente eliminando) le
fasi di manipolazione manuale altre dalla definizione di carichi e vincoli;
• generali nella loro applicazione, non contenendo elementi restrittivi l’applicabilità a specifici siti anatomici.
Questi requisiti indirizzano lo studio applicativo verso una costruzione del modello numerico basata direttamente sui dati delle immagini medicali (i dataset
CT specificamente), che sono lo strumento di indagine in grado di fornire informazioni circa la morfologia e la distribuzione di densità dei tessuti ossei trattati. Peraltro uno dei maggiori limiti della procedura, oggi di riferimento, basata
sul FEM è rappresentato dall’estrema onerosità in termini di tempo e di risorse
qualificate necessarie per la preparazione di ogni singolo modello: la fase di pre–
processing (scontornamento del dataset CT, definizione matematica della superfici
di contorno dell’osso, generazione della mesh, mappatura delle proprietá materiali) è solo in parte completata con processi automatici e richiede un controllo
attento e continuo da parte di competenze qualificate. Per superare questo ostacolo all’applicazione su vasta scala di questa procedura, realizzando un processo
di tempistiche compatibili con le esigenze della pratica clinica, è indispensabile
individuare una procedura quanto più possibile automatizzata in cui le manipolazioni “manuali” siano ridotte al minimo necessario.
132
5.1 – La selezione delle metodologia meshless applicata
Un’idea immediata è quindi quella di non manipolare minimamente il dataset
CT di partenza, provvedendo al più alla sola selezione della regione di interesse
per evitare un inutile appesantimento computazionale. Vanno ora sottolineate
due circostanze importanti: i dataset CT offrono dei valori scalari (le unità HU)
in punti disposti secondo una una griglia di punti a spaziatura regolare: con riferimento all’immagine di figura (5.1) la spaziatura risulta costante nel piano xy,
avendo le immagini tutte la stessa risoluzione ∆x, ∆y, e può risultare variabile
lungo l’asse longitudinale di scansione z, potendo variare la distanza che separa
due immagini adiacenti). La seconda circostanza importante è che i valori di HU
del dataset variano da punto a punto. Come illustrato nel dettaglio nel seguente
paragrafo 5.2.5, le unità HU sono correlabili con la densità minerale, e questa è a
sua volta correlabile con un valore di modulo di elasticità: si ha quindi disponibile una mappatura di valori di modulo di elasticità, variabile da punto a punto,
sui punti di una griglia regolare.
Figura 5.1. Apparecchiatura per scansione CT: la scansione, dopo opportune rielaborazioni, fornisce una pila di immagini registrate rispetto ad un sistema di
riferimento disposto come indicato in figura
5.1 La selezione delle metodologia meshless applicata
Nel capitolo precedente sono stati proposti tre differenti approcci meshless. Di
questi solamente il primo (quello basato sulla creazione di un complesso di celle
133
5 – Applicazione esplorativa della formulazione Meshless a celle locali con il Metodo delle Celle
locale) si è verificato adatto ad un’applicazione con le direzioni sopra specificate
(costruzione diretta del modello sulla griglia regolare di punti del dataset CT):
• l’approccio con interpolazione polinomiale costringe, nei problemi tridimensionali, all’adozione di polinomi interpolanti che o producono una matrice di interpolazione singolare quando i punti sono disposti su una griglia
regolare, o hanno un elevato grado (parziale e totale), con significativa complessità algebrica della formulazione e (per distribuzioni regolari dei punti)
asimmetria nella distribuzione dei satelliti rispetto al polo;
• l’approccio con interpolazione RBF, certamente più agile in termini di selezione della costellazione, è risultato avere una complessità formale eccessiva per gli strumenti di manipolazione simbolica disponibili relativamente al calcolo dell’espressione analitica della equazione di bilancio al nodo:
in altri termini l’espressione algebrica dell’integrazione delle tensioni sulla superficie di una regione tributaria anche di forma elementare è risultata eccessivamente complessa per risorse algoritmiche e computazionali dei
manipolatori simbolici disponibili1 .
L’approccio meshless a celle locali è dunque il candidato per l’applicazione
di test. Nel caso tridmensionale la mesh locale costruita attorno ad ogni nodo è
composta da tetraedri, aventi vertice nel nodo polo e gli altri tre vertici nei nodi
primi vicini. La disposizione regolare dei punti sulla griglia strutturata del dataset CT fa assumere a questa mesh una conformazione di semplice definizione,
come illustrato in figura (5.2)
L’applicazione di questa metodologia ha però individuato problemi numerici
legati alla non simmetria della matrice di rigidezza del sistema risolvente; questa
asimmetria origina dalla disomogeneità delle proprietà dei materiali associate alle celle locali di ciascun nodo: alle celle della mesh locale di tetraedri costruita
attorno ad un nodo va infatti associato un valore di modulo di elasticità E che
sia in qualche modo legato ai valori dei nodi su cui la mesh locale si appoggia;
qualunque strategia si adotti per individuare questo valore (media dei valori ai
nodi della costellazione, media pesata, valore associato al nodo polo... ) si ha
comunque che in ogni mesh locale sono presenti valori di E differenti da quelli associati alle celle delle mesh locali adiacenti; anche se la griglia è regolare, e
anche se dunque la relazione “polo satellite” risulta simmetrica, le forze di superficie calcolate sull’elemento di separazione tra due nodi affiancati è diversa
quando venga calcolata relativamente alla mesh dell’uno o dell’altro nodo, fatto
1
sono stati utilizzati i programmi open source di Computer Algebra System (CAS): Maxima (http://maxima.sourceforge.net/), Mathomatic (http://www.mathomatic.org/math/) e il
pacchetto “Symbolic” della suite open source Octave-Forge (http://octave.sourceforge.net).
134
5.1 – La selezione delle metodologia meshless applicata
Figura 5.2. Mesh locale costituita da tetraedri a 4 nodi appoggiati al nodo
polo e ai nodi primi vicini
questo che produce un’asimmetria nella matrice di rigidezza globale.
Si è verificato che realizzando una mediazione delle forze agenti sulla superficie
di interfaccia tra due nodi vicini, considerata appartenente alle regioni tributarie
dei due nodi, il calcolo andava a buon fine, producendosi stabilmente un risultato coerente. L’idea è quella di considerare, nel bilancio delle forze agenti sul
contorno della regione tributaria, la media delle forze che si scambiano mutuamente polo e satellite, mediando i due valori riferiti alla stessa superficie quando
la relazione polo–satellite viene rovesciata. Facendo riferimento alla figura (5.3) si
consideri il nodo P , la sua mesh locale di quattro triangoli, e la regione tributaria;
fissando in particolare l’attenzione sul lato AB:
P
• sia FAB
la forza agente su AB quando calcolata relativamente alla interpolazione dei valori di spostamento nodale della cella P QS;
Q
• sia FAB
la forza agente su AB quando calcolata relativamente alla interpolazione dei valori di spostamento nodale della cella P QR;
Nel bilancio delle forze agenti sulla regione tributaria del nodo A, relativaP
mente
³ al lato AB,
´ si considera non già FAB quanto piuttosto il valore medio
Q
P
1/2 FAB
+ FBA
. Si tratta di fatto di considerare lo stesso elemento di superficie come appartenente ai due campi di interpolazione locale degli spostamenti
nodali costituiti dalle celle locali dei due nodi affacciati, separati dalla superficie
in esame.
L’idea, di implementazione immediata nel caso di punti disposti su griglie regolari, è generalizzabile, con la sola (non banale) condizione di rispettare il carattere
mutuo del rapporto “polo-satellite” tra tutti i nodi vicini.
135
5 – Applicazione esplorativa della formulazione Meshless a celle locali con il Metodo delle Celle
Figura 5.3. Mediazione delle forze sulla superficie di contorno della ragione tributaria del nodo P : la forza agente sul lato AB è assunta pari alla media tra
P (calcolata relativamente all’interpolazione degli spostamenti nodali della celFAB
Q
la P QS) e FAB
(calcolata relativamente all’interpolazione degli spostamenti nodali
della cella P QR); la cella P QR appartiene alla mesh locale del nodo Q
Figura 5.4. Regioni tributarie di due nodi vicini distanziate per chiarezza
di rappresentazione: la superficie di confine tra i due nodi adiacenti è stata
divisa nelle quattro porzioni di pertinenza di altrettanti tetraedri dei due
complessi locali affacciati.
136
5.2 – Il test esplorativo
Nel caso tridimensionale, e per disposizioni regolari di punti (caso corrispondente alla situazione del dataset CT) una scelta immediata è quella di considerare come regione tributaria di ciascun nodo il corrispondente poliedro di Voronoi
(che in questo caso è un parallelepipedo le cui facce sono passanti per i punti
medi dei segmenti congiungenti ciascun nodo con i nodi primi vicini secondo le
direzioni di allineamento della griglia). Costruita la mesh locale di tetraedri, la
mediazione delle forze avviene sulla superficie di interfaccia tra un nodo e il nodo
vicino. Questa superficie rientra nella “pertinenza” di quattro differenti tetraedri
della mesh locale di ciascuno dei due nodi: su ognuna delle quattro porzioni di
superficie si calcola la forza agente relativamente all’interpolazione del campo
di spostamenti dei tetraedri di riferimento appartenenti alle mesh locali dei due
nodi in esame. Questa procedura, adottata e valutata nella sua applicazione nel
prosieguo di questa tesi, viene qui denominata Meshless Cell Method (MCM).
Va rilevato come questa procedura non sia affatto semplice in termini algoritmici
per una disposizione arbitraria di punti nello spazio. Nel caso specifico dell’applicazione, però, la fortunata circostanza dell’allineamento dei punti rende il processo di mediazione delle forze molto semplice.
Un’altro elemento che risulta qui significativo sottolineare è come questa procedura conservi comunque la sua raison d’être nella filosofia meshless: i tetraedri
sono qui delle “infrastrutture” per l’interpolazione locale del campo degli spostamenti nella regione di spazio a loro associata; in questa regione le forze di
superficie sono calcolate con riferimento all’interpolazione del corrispondente tetraedro anche in punti ad esso esterni. In questo senso si può considerare l’MCM
come una sorta di cross-over tra la procedura a celle locali (in cui si considera
solamente la regione di spazio interna ad ogni cella) e quella ad interpolazione
polinomiale descritte nel capitolo 4. Replicando i test della trave di Timoshenko
con le stesse modalità e parametri di cui al paragrafo 4.2.2.1, si sono ottenuti i
risultati riportati in tabella (5.5) e nel grafico di figura (5.6), che testimoniano la
validità, in termini di precisione numerica, della procedura.
5.2 Il test esplorativo
L’algoritmo MCM è stato valutato riproducendo un’indagine accoppiata numericosperimentale condotta con misure di deformazione in campo elastico su un segmento osseo in vitro [77]: un femore umano è stato sottoposto a delle prove di
carico secondo differenti configurazioni, misurando di volta in volta le deformazioni sulla sua superficie in punti anatomicamente significativi. Le prove erano
state replicate con un modello FEM costruito con la procedura standardizzata a
partire da una acquisizione CT: la comparazione tra le misure sperimentali delle
137
5 – Applicazione esplorativa della formulazione Meshless a celle locali con il Metodo delle Celle
lato
δ
1
0.5
0.25
0.125
9.06E-004
1.75E-004
4.09E-005
1.05E-005
Figura 5.5. Test della trave di Timoshenko per l’implementazione meshless a celle locali con simmetrizzazione: valore dello scarto quadratico
medio δ per i tra soluzione numerica
e soluzione teorica nei punti interni
al dominio al variare del passo della
griglia di punti
Figura 5.6. Test della trave di Timoshenko per per l’implementazione meshless a celle locali con
simmetrizzazione: dati di tabella
(5.5) in scala logaritmica di errore
e passo di griglia
deformazioni superficiali e i valori predetti dal modello numerico nei punti corrispondenti ha costituito la base di valutazione dell’accuratezza dell’intera procedura di modellizzazione numerica. Questo esperimento ha dunque costituito
una prima importante doppia verifica dell’approccio MCM: la valutazione di accuratezza è avvenuta per confronto con le misure sperimentali mentre i risultati
ottenuti dal FEM, a livello aggregato, hanno costituito una base di valutazione
comparativa rispetto alla procedura di simulazione di riferimento.
5.2.1 L’esperimento di riferimento
Su un femore destro proveniente da un donatore maschio di 51 anni (peso 75
kg, altezza 175 cm) sono state applicate 13 rosette estensimetriche triassiali posizionate su ciascuno dei quattro aspetti anatomici (anteriore, posteriore, mediale
, laterale), su quattro diversi livelli in direzione prossimale-distale (testa, collo,
metafisi, diafisi). Nella regione diafisaria sono stati applicati soltanto due estensimetri (in posizione laterale e mediale, ove si suppone si misurino deformazioni
più significative) per limitare il numero di canali di acquisizione. L’applicazione
di un estensimetro nell’aspetto laterale del collo è stata parimenti omessa, a causa dell’estrema irregolarità della superficie. Si faccia riferimento alla figura (5.7)
per un’identificazione più chiara del posizionamento dei sensori. La superficie di
applicazione di ciascuno dei sensori è stata preparata secondo una procedura validata in letteratura [78] per le prove su campioni idratati di osso cadaverico. Le
138
5.2 – Il test esplorativo
13 rosette estensimetriche applicate erano del modello KFG-3-120-D1711L3M2S
(Kyowa, Tokyo, Japan), aventi una lunghezza di griglia di 3 mm. La tensione
applicata stata limitata a 0.5 V per griglia, per evitare effetti di surriscaldamento. Le deformazioni sono state acquisite ad una frequenza di 10 Hz, con un filtro
passa-basso in frequenza fissato a 1Hz.
Figura 5.7. Schema della disposizione degli estensimetri; da sinistra: vista anteriore, laterale, posteriore, mediale
La parte distale del femore è stata inclusa in una base di afferraggio di PMMA2 , per realizzare un vincolo ad incastro nel posizionamento sulla macchina di
carico secondo gli schemi di seguito descritti. La macchina di prova era equipaggiata con una cella di carico di portata 5kN (Mod. 8502, Instron, Canton, MA,
USA). Il campione è stato montato sulla cella di carico per mezzo di una piattaforma che consente l’inclinazione del campione secondo diversi angoli di prova.
Il carico veniva trasmesso dall’attuatore attraverso slitte a basso attrito per evitare la trasmissione di indesiderate componenti orizzontali di carico. Uno schema
dell’applicazione del carico riportato in figura (5.8).
Lo schema di carico complessivo prevedeva l’applicazione sulla testa femorale di una forza pari a circa il peso corporeo (800 N , per evitare condizioni di
2
polimetilmetacrilato
139
5 – Applicazione esplorativa della formulazione Meshless a celle locali con il Metodo delle Celle
Figura 5.8. Rappresentazione schematica del campione montato sulla macchina
di prova in posizione di flessione a 18◦ e rappresentazione schematica delle configurazioni di carico; il carico è applicato verticalmente (neutral - LC1) e con diverse
inclinazioni rispetto all’asse biomeccanico: nel piano frontale (adduzione) 3◦ (LC2)
e 24◦ (LC4) e nel piano sagittale 3◦ (estensione - LC3) e 18◦ (flessione - LC5)
danno meccanico nel campione) secondo 5 diverse configurazioni di carico corrispondenti alle direzioni estreme raggiunte dalla forza di reazione all’anca nello
svolgimento di normali azioni motorie [79]. La prova è stata condotta in controllo
di carico, consentendo così lo sviluppo di eventuali effetti di creep; il carico massimo, raggiunto quasi-staticamente con incrementi di 100 N , è stato mantenuto
per circa 30 secondi. Sono state eseguite cinque ripetizioni di misura ad intervalli di almeno 10 minuti per consentire il recupero di eventuali effetti viscoelastici
indotti. La procedura descritta ha consentito di misurare con ottima ripetibilità
le deformazioni, controllare la linearità della risposta all’applicazione del carico,
quantificare l’entità di fenomeni viscoelastici e dell’eventuale insorgenza di deformazioni irreversibili.
Le condizioni di prova erano le seguenti: temperatura 29–31◦ C, umidità relativa 40%. Il campione era tenuto costantemente avvolto in panni impregnati di
soluzione salina.
I dati grezzi uscenti dalle griglie estensimetriche sono stati preliminarmente esaminati con il criterio di Chauvenet per l’eliminazione di dati inattendibili, che
però sono risultati assenti. La ripetibilità tra le misure è risultata ottima, così come il test di linearità delle deformazioni di ciascun estensimetro in funzione del
carico applicato. Sono state quindi calcolate le medie delle cinque ripetizioni di
140
5.2 – Il test esplorativo
misura per ciascun canale di ciascun estensimetro.
5.2.2 Il dataset CT
Il femore è stato sottoposto a tomografia computerizzata (scanner HiSpeed, General Electric Co., USA, parametri di scansione: 120 kV p, 180 mA, tipici di un
normale esame clinico) dopo essere stato scongelato ed immerso in acqua per
prevenire artefatti di indurimento del fascio di radiazioni. È stato applicato un
protocollo di scansione assiale, con spessore del fascio 1 mm e distanza assiale tra
scansioni successive pari a 2 mm nella regione prossimale (dalla testa al piccolo
trocantere) e di 4 mm nella regione diafisaria e distale. Il valore dimensionale del
pixel è risultato di 0.46 mm.
5.2.3 Il modello FEM subject specific
Il modello ad elementi finiti è stato generato a partire dal dataset CT seguendo
una procedura che può essere così schematizzata:
• estrazione del modello virtuale della superficie tridimensionale dell’osso;
• generazione della mesh di elementi finiti;
• mappatura delle proprietà meccaniche (modello costitutivo elastico isotropo disomogeneo) del tessuto osseo sulla mesh.
Per quanto riguarda il primo passo, i contorni esterni della superficie del campione sono stati estratti dalle sezioni tomografiche a mezzo di un software semiautomatico basato su un algoritmo di identificazione dei bordi [80]. I contorni così
ottenuti sono stati interpolati per ottenere la superficie esterna del femore usando una triangolazione di Delaunay [5]. La superficie tridimensionale tassellizzata
così ottenuta è stata convertita in un modello NURBS (Non Uniform Rational BSpline) con il software di reverse engineering Geomagic Studio (v. 6, Raindrop
Geomagic Inc., USA).
Il secondo passo di modellazione è stato realizzato generando in maniera automatica con il pacchetto software HyperMesh (Altair Engineering, Inc, USA) che
implementa un algoritmo advancing-front, una mesh di tetraedri a dieci nodi del
femore. È stata posta attenzione a che sulla superficie del modello fosse generato
uno strato regolare di tetraedri in modo da minimizzare l’inevitabile effetto di
volume parziale che tende a sottostimare la densità (e quindi il modulo elastico)
assegnata al modello nelle regioni di confine e particolarmente nella zona del collo, a causa dell’inclinazione relativa in tale zona della superficie e del fascio di
141
5 – Applicazione esplorativa della formulazione Meshless a celle locali con il Metodo delle Celle
Figura 5.9.
Modello virtuale tridimensionale (NURBS) del femore
radiazione incidente. La regione condilare non è stata inclusa nel modello FEM,
perché non si è ritenuto necessario modellare la zona inclusa in PMMA, stimando sufficiente il vincolo fisso dei nodi giacenti al livello prossimale del blocco. La
mesh ottenuta è risultata di 76026 elementi e 118970 nodi.
La mappatura delle proprietà meccaniche del tessuto osseo sugli elementi della mesh è avvenuta con il software BoneMat [81]. Il software attribuisce ad ogni
elemento della mesh un valore di modulo di elasticità sulla base dei valori di unità HU lette nel dataset CT nella regione di spazio occupata dall’elemento. Oltre
al dataset CT, il software richiede come input l’equazione di calibrazione densitometrica (legame HU - densità) dell’acquisizione CT e la relazione costitutiva
(legame densità - modulo elastico), entrambe descritte nel seguente paragrafo
(5.2.5). Il modello FEM risulta quindi elastico lineare isotropo nel comportamento materiale di ciascun elemento, ma disomogeneo nella distribuzione dei moduli
di elasticità.
142
5.2 – Il test esplorativo
5.2.3.1 Condizioni al contorno
Per riprodurre le condizioni di vincolo della prova sperimentale, sono stati impediti gli spostamenti di tutti i nodi superficiali corrispondenti alle regioni del
segmento osseo immerse nel blocco di PMMA. Il carico è invece stato applicato
al nodo di vertice più prossimo alla posizione registrata del punto di applicazione
del carico in ciascuna configurazione di sollecitazione.
Figura 5.10. Sezione coronale (a sinistra) e trasversale (a destra) del
modello ad elementi finiti.
5.2.4 Il modello MCM
Il modello MCM è stato generato utilizzando come nodi i punti della griglia della
scansione CT, senza alcuna operazione di segmentazione.
La costruzione del modello è stata diretta: selezionata la regione di interesse (con
quota a partire dal piano di imposta della base di PMMA) l’unica fase di preprocessing è stata un sottocampionamento (subsampling) su una griglia regolare di
passo 2 mm, riducendo i numero di punti in ragione delle limitazioni di memoria del calcolatore disponibile per condurre l’analisi. Ai punti a quota minima
(corrispondente al piano di imposta della base di PMMA del femore) sono stati
imposti spostamenti nulli, replicando le condizioni di vincolo delle prove di carico sperimentali. Il carico corrispondente a ciascuna condizione di sollecitazione
è stato applicato al nodo del dataset CT più prossimo alla posizione registrata del
143
5 – Applicazione esplorativa della formulazione Meshless a celle locali con il Metodo delle Celle
punto di applicazione del carico sperimentale.
Attorno ad ogni nodo del dataset è stata costruita la mesh locale di tetraedri
costruiti con i nodi prossimi nelle direzioni di allineamento della griglia di punti.
A tutte le celle della mesh locale è stato associato un valore unico di modulo di
elasticità caratterizzante il legame costitutivo elastico lineare isotropo ad esse associato. Il valore del modulo di elasticità è stato determinato come media pesata
dei valori determinati ai vertici (tramite le relazioni illustrate nel paragrafo 5.2.5)
e attribuendo al nodo polo peso doppio rispetto ai nodi satellite.
La soluzione del sistema di equazioni lineari ottenuto dall’assemblaggio dei
bilanci delle forze ai vari nodi è stata ottenuta con un codice realizzato all’uopo
in linguaggio C utilizzante la libreria PETSc3 per la soluzione di sistemi di equazioni lineari.
5.2.5 La definizione delle proprietà materiali
I valori di modulo di elasticità E sono stati derivati dalle informazioni del datset
CT tramite due operazioni:
• la relazione di calibrazione densitometrica del dataset CT, che correla i valori di Hounsfield Unit (HU) con valori di densità minerale (ash density)
individuata in fase di acquisizione della tomografia tramite lo “European
Spine Phantom” [82]:
ρash = 0.0007851 HU + 0.1439277
h g i
cm3
(5.1)
• la relazione tra densità minerale e modulo di elasticità, assunta dalla letteratura [83]:
2.29
E = 10.5e3 ρash
[GP a]
(5.2)
Il modulo di Poisson è stato assunto pari a 0.3 [84].
5.2.6 Determinazione dell’accuratezza dei modelli numerici
Le misure risultanti (26) sono state utilizzate per la validazione delle deformazioni principali calcolate dai modelli numerici.
3
http://www.mcs.anl.gov/petsc/petsc-as/
144
5.2 – Il test esplorativo
5.2.6.1 Modello FEM:
Per il modello FEM il calcolo dei valori principali di deformazione è avvenuto
individuando le due direzioni principali di tensione cui corrispondessero valori
di tensione più lontani dallo zero (ossia escludendo la direzione principale con
minore valore di tensione associato). Si suppone infatti uno stato di stress piano sulla superficie, condizione usualmente verificata nella simulazione numerica
dove una delle tensioni principali calcolate è solitamente assai prossima allo zero.
Si calcolano a questo punto le deformazioni principali corrispondenti, da utilizzare per il confronto con le misure sperimentali. Va sottolineato come esse non
corrispondano necessariamente ai valori principali di deformazione minimo e
massimo poiché, contrariamente allo stato di tensione, non è possibile ipotizzare
l’esistenza di uno stato di deformazione piano: in questa condizione i valori di
deformazione principale minimo o massimo potrebbero corrispondere a direzioni non tangenti alla superficie.
Nella fase di preparazione della mesh è stata posta attenzione a che un nodo corrispondesse alla posizione di centro-griglia (digitalizzata e riportata sul modello)
di ciascun estensimetro. A causa della presenza di elevati gradienti sia di densità
che di stress nella maggior parte delle posizioni in cui sono stati posizionati gli
estensimetri, le tensioni principali usate per il confronto con le misure sperimentali sono state mediate sui nodi di superficie corrispondenti all’area sensibile di
ciascun estensimetro.
5.2.6.2 Modello MCM
Nel modello MCM viene determinato il vettore spostamento in ogni punto del
dataset CT. All’interno di ogni voxel è quindi individuabile un campo di spostamenti continuo interpolando con una funzione trilineare i valori di spostamento
ai vertici. I valori di deformazione nei punti corrispondenti agli estensimetri sono stati quindi calcolati derivando il campo di spostamenti del voxel contenente il punto corrispondente all’estensimetro; i valori principali di deformazione
adottati sono quelli corrispondenti alle direzioni di tensione minima e massima,
conformemente all procedura sopra descritta a proposito del modello FEM.
5.2.6.3 Metrica di accuratezza
L’accuratezza delle predizioni numeriche rispetto alle misure di deformazione
ricavate sperimentalmente è stata verificata nel modo seguente:
• è stata realizzata una regressione lineare tra parametri omologhi (numerici
vs. sperimentali); la bontà della predizione in questo caso è individuata dal
valore di correlazione R2 e dai parametri coefficiente angolare ed intercetta
145
5 – Applicazione esplorativa della formulazione Meshless a celle locali con il Metodo delle Celle
della retta di regressione individuata; in condizioni ideali di accordo tra
modello numerico e dati sperimentali, vi dovrebbe essere perfetta linearità
nella relazione (R2 = 1), con pendenza pari ad uno (equivalente qui ad una
corretta stima della rigidezza) ed intercetta pari a zero (assenza di errore
sistematico di sovra o sottostima dei dati sperimentali);
• vengono calcolati alcuni parametri derivati dalle stime puntuali di errore
nella predizione: l’errore quadratico medio (RMSE), il suo valore percentuale rispetto al massimo valore di misura sperimentale, l’errore massimo e
analogamente il suo valore percentuale rispetto al massimo valore misurato.
Come ulteriore elemento di valutazione, volto ad delineare le differenze di
comportamento tra MCM e FEM, sono stati confrontati i valori dello spostamento
calcolati dai due modelli in due punti anatomicamente ben identificabili: il centro
della testa del femore e il punto posteriore del piccolo trocantere.
5.3 Risultati
Verificato che non sussistesse dipendenza tra la condizione di carico e le differenze tra valori di deformazione sperimentali e quelli predetti dal modello MCM
(ANOVA fattoriale con P-value > 0.9), i valori di deformazione sono strati considerati in maniera aggregata per tutte le condizioni di carico e analizzati nel loro
complesso.
I valori principali di deformazione predetti dal modello MCM manifestano un’elevata correlazione con i valori sperimentali (R2 = 0.85). La pendenza della retta
di regressione (valori numerici vs. sperimentali) è risultata maggiore dell’unità
ma il valore dell’intercetta è risultato significativamente prossimo allo 0, come
riportato e illustrato nel grafico di figura (5.11) dove, per comparazione, sono riportati anche i valori ottenuti con il modello FEM e la relativa retta di regressione.
Gli indicatori di accuratezza globale sono risultati essere soddisfacenti, essendo il
valore di errore massimo pari al 40% e l’errore quadratico medio apri al 16%, come riportati in tabella (5.1). Nella tabella (5.2) sono riportate le componenti dello
spostamento estratte dai due modelli MCM e FEM nei due punti di controllo; i
valori suggeriscono un comportamento analogo dei due modelli avendo gli spostamenti predetti la stessa direzione e ampiezze paragonabili. A questo livello il
modello MCM appare sistematicamente più rigido del corrispondente modello
FEM.
146
5.3 – Risultati
Figura 5.11. Retta di regressione dei valori di deformazione predetti (µε, asse y)
rispetto ai valori sperimentali (µε, asse x) per MCM e FEM
strain correlation
MCM
FEM
R2
pendenza
intercetta
RMSE
RMSE %
Max. err.
Max. err. %
0.85
1.21
36
258
15.6%
621
35.5%
0.91
1.10
21
163
9.8%
699
42.3%
Tabella 5.1. Parametri della retta di regressione e valori degli indicatori di
accuratezza globale per le predizioni MCM e FEM: dati aggregai relativi a
tutte le condizioni di carico
147
5 – Applicazione esplorativa della formulazione Meshless a celle locali con il Metodo delle Celle
Condizione di Carico
LC1
LC2
LC3
LC4
LC5
CM FEM
CM FEM
CM
FEM
CM
FEM
CM
FEM
Piccolo trocantere
Ux [mm]
Uy [mm]
Uz [mm]
|U | [mm]
-2.3
-0.3
-0.1
2.3
-2.7
-0.4
-0.1
2.8
-1.4
-0.3
-0.1
1.4
-1.7
-0.4
-0.1
1.7
-2.3
0.6
0.0
2.4
-2.8
0.6
0.0
2.9
4.2
-0.2
0.0
4.2
5.2
-0.2
0.0
5.2
-1.7
-5.1
-0.4
5.3
-2.2
-6.0
-0.5
6.4
Centro d’anca
Ux [mm]
Uy [mm]
Uz [mm]
|U | [mm]
-2.3
-0.4
-0.7
3.3
-3.9
-0.5
-0.9
4.0
-2.1
-0.4
-0.5
2.2
-2.5
-0.5
-0.6
2.6
-3.3
0.8
-0.7
3.5
-4.0
0.9
-0.9
4.2
5.3
-0.4
0.7
5.4
6.6
-0.3
1.0
6.7
-2.5
-6.9
-0.7
7.4
-3.2
-8.2
-0.9
8.9
Tabella 5.2. valori dello spostamento al piccolo trocantere e al centro d’anca
predetti dai modelli MCM e FEM nelle 5 condizioni di carico
148
Capitolo 6
Validazione della formulazione
Meshless a celle locali con il Metodo
delle Celle
Nel capitolo precedente è stata illustrata una prima valutazione esplorativa dell’applicazione dell’approccio meshless con il CM a celle locali (MCM) nella predizione dello stato di deformazione di segmenti di ossa lunghe. La valutazione
è avvenuta replicando un test meccanico condotto in vitro su un femore umano
con un modello numerico costruito direttamente da un dataset CT; il modello, registrato spazialmente rispetto al riferimento sperimentale, replicava le condizioni
di carico e di vincolo del test meccanico: la valutazione è avvenuta per comparazione dei valori di deformazione registrati sperimentalmente in punti anatomicamente significativi con i valori predetti dal modello numerico nei medesimi
punti. Un ulteriore elemento di valutazione è stato il confronto con le predizioni di un analogo modello FEM, replicante il medesimo esperimento, ed eseguito
secondo una procedura standard precedentemente validata rispetto alle misure
sperimentali.
In questo primo test è emersa una buona corrispondenza delle predizioni del modello MCM con i valori sperimentali; gli elementi usati come valutazione (coefficiente angolare e intercetta della retta di regressione dati numerici rispetto ai
valori sperimentali, errore medio e massimo delle predizioni numeriche rispetto
ai valori misurati) sono risultati confrontabili con quelli caratterizzanti il modello
FEM validato.
Questa prima valutazione è risultata incoraggiante l’ipotesi che l’MCM possa costituire un processo di modellazione automatico e accurato, potenzialmente utile
per la predizione dello stato di sollecitazione in segmenti ossei in vivo. Benché
il confronto abbia riguardato 13 differenti siti di misura delle deformazioni in 5
distinte condizioni di sollecitazione, il test conserva ancora un valore puramente
149
6 – Validazione della formulazione Meshless a celle locali con il Metodo delle Celle
indicativo, avendo due sostanziali limitazioni:
• è stato condotto su un singolo esemplare di femore “normale” sia sotto il
profilo anatomico che sotto il profilo delle condizioni di mineralizzazione;
• è stato realizzato costruendo il modello MCM su un dataset CT sottocampionato, perdendo con questo sia dettaglio di definizione geometrica del
segmento osseo, che accuratezza nella mappatura delle proprietà materiali.
Affinché una procedura di modellazione numerica possa ambire a costituire elemento orientativo nella pratica clinica, imprescindibile è la valutazione dell’attendibilità della precisione numerica ottenibile con un processo che prende il nome
di validazione. Due elementi focali di questo processo [85] sono la variabilità intersoggettiva (ossia la verifica del modello numerico1 quando applicato in casi
distinti) e il confronto con esperimenti controllati in vitro.
In questo capitolo verrà dunque descritto uno studio di validazione della procedura di modellazione MCM. La base del confronto è stata una campagna di
misure sperimentali precedentemente condotta su 8 distinti esemplari di femore:
6 diverse configurazioni di sollecitazione in campo elastico sono state applicate
su ciascun femore, misurando le corrispondenti deformazioni con 15 estensimetri posizionati in punti anatomicamente significativi. Accanto alle misure sperimentali, un ulteriore elemento di confronto e verifica è stato reso disponibile dai
modelli FEM realizzati secondo una procedura validata e replicanti le medesime
prove meccaniche. Questo studio numerico–sperimentale [86] costituisce a tutt’oggi il più consistente benchmark di confronto relativamente allo studio della
deformazione nei segmenti di ossa lunghe a livello di organo.
Le analisi condotte con modelli MCM costruiti sulle immagini cliniche dei femori
studiati, hanno avuto quindi disponibile, come per il test preliminare del capitolo
5, il doppio confronto con le misure sperimentali e con le predizioni dei modelli
FEM. Un ulteriore elemento di valutazione è stato assunto con un confronto locale
sistematico con uno dei modelli FEM in una delle condizioni di carico, confrontando i valori principali di deformazioni ai centroidi degli elementi FEM con i
valori estratti dal modello MCM nei medesimi punti.
6.1 L’esperimento di riferimento
L’esperimento è stato condotto su quattro paia di femori umani, provenienti da
donatori maschi adulti deceduti per infarto del miocardio e senza pregresse patologie all’apparato muscolo scheletrico. L’indagine non distruttiva DEXA (Dual
1
inteso quale implementazione di una procedura cognitiva di previsione e descrizione del
comportamento di un sistema
150
6.1 – L’esperimento di riferimento
Energy X-ray Absorptiometry) ha collocato questi campioni tra la condizione
di “osteopenia” e quello di “severe osteoporosis”. Precedentemente alle prove meccaniche non distruttive, è stata realizzata un’acquisizione CT di ciascun
esemplare, secondo le specifiche di seguito riportate.
6.1.1 Le misure sperimentali
Ciascun femore è stato cementato alla base, nella regione condilare, in un contenitore di acciaio a sezione rettangolare per mezzo di PMMA. Sulla superficie sono
stati posizionati 15 estensimetri secondo ciascun aspetto anatomico (anteriore,
laterale, posteriore e mediale) su 4 livelli collocati principalmente nella zona epifisaria, come illustrato in figura (6.1). La superficie di applicazione di ciascuno
dei sensori è stata preparata secondo una procedura validata in letteratura [78]
per le prove su campioni idratati di osso cadaverico. Le 15 rosette estensimetriche applicate erano del modello KFG-3-120-D1711L3M2S (Kyowa, Tokyo, Japan),
aventi una lunghezza di griglia di 3 mm. La tensione applicata stata limitata a
0.5 V per griglia, per evitare effetti di surriscaldamento. Le deformazioni sono
state acquisite ad una frequenza di 10 Hz, con un filtro passa-basso in frequenza
fissato a 1 Hz.
Figura 6.1. Rappresentazione dell’aspetto anatomico anteriore e laterale di un
femore destro strumentato: la posizione nominale degli estensimetri è indicata
relativamente alla lunghezza biomeccanica del femore e al diametro della testa.
L’assenza di un estensimetro nell’aspetto laterale del collo è dovuta all’irregolarità
della superficie in questa regione
151
6 – Validazione della formulazione Meshless a celle locali con il Metodo delle Celle
6.1.1.1 Condizioni di carico
Su ciascun femore sono state applicate sei differenti condizioni di carico corrispondenti a flessione in piani differenti, carico assiale e torsione; 4 configurazioni
di carico corrispondono alle direzioni estreme raggiunte dalla forza di reazione
all’anca nello svolgimento di normali azioni motorie [79]; ulteriori configurazioni
corrispondono al carico verticale (direzione definita dal piano sagittale da quello
frontale del femore) e ad una condizione (inclinazione del femore di 8◦ nel piano frontale) assimilabile alla fase di appoggio monopodalico della camminata, e
individuata essere, con una preliminare indagine FEM, particolarmente onerosa
per la regione del collo femorale, in termini di stress prodotti.
Al fine di prevenire danni meccanici ai campioni è stato applicato un carico mas-
Figura 6.2. Visualizzazione delle varie
configurazioni di carico
Figura 6.3. Mesh di un modello FEM
nella regione prossimale con evidenziati
gli elementi afferenti ai nodi corrispondenti ad estensimetri
simo corrispondente al 75% del peso corporeo del donatore. Ciascun campione è
stato montato sulla cella di carico di portata 5kN della macchina di prova (Mod.
8502, Instron, Canton, MA, USA) con una piattaforma che consente l’inclinazione del campione secondo i diversi angoli di prova corrispondenti alle condizioni
di carico; per evitare la trasmissione di indesiderate componenti orizzontali di
carico, il collegamento alla cella di carico è stato realizzato con slitte a basso attrito. Il protocollo di misura ha permesso di quantificare la linearità del comportamento del materiale, i fenomeni viscoleastici e il manifestarsi di deformazioni
permanenti secondo i dettagli già esposti al paragrafo 5.2.1.
152
6.1 – L’esperimento di riferimento
6.1.2 I modelli FEM
La realizzazione dei modelli FEM basata sui dataset CT di ognuno dei femori
ha seguito una procedura consolidata [77]: con la segmentazione di ogni dataset (software AMIRA 3.1.1, Mercury Computer Systems Inc, USA) si è definito
un modello geometrico NURBS di ogni femore (Geomagic Studio v. 7, Raindrop Geomagic Inc., USA) con sui è stata costruita una mesh non strutturata di
tetraedri a 10 nodi generata automaticamente da un algoritmo advancing-front
(HyperMesh v. 7, Altair Engineering Inc., USA). In corrispondenza del centro di
ciascuno estensimetri è stato posizionato un nodo, con una procedura di registrazione con il riferimento sperimentale (cfr. paragrafo 6.1.3). Ogni modello FEM
è stato tagliato e vincolato a incastro a livello della base di cemento della prova
sperimentale. La dimensione media degli elementi superficiali di ogni modello è
pari a 3 mm nella diafisi e di 2 mm nell’epifisi; il numero di elementi degli otto
modelli FEM varia tra 69272 e 80508; il corrispondente numero di nodi tra 104020
e 124592.
La distribuzione disomogenea delle prorietà meccaniche è stata mappata sugli elementi dei modelli FEM tramite il software2 BoneMat_V3 in grado di attribuire un valore medio del modulo di elasticità E ad ogni elemento della mesh:
l’algoritmo converte dapprima le unità HU in valori di E e poi calcola un’integrazione numerica entro il volume (spazialmente registrato con l’acquisizione CT) di
ciascun elemento del modello FEM.
6.1.3 Acquisizione CT, registrazione spaziale e proprietà meccaniche
I femori sono stati sottoposti a tomografia computerizzata (scanner: HiSpeed,
General Electric Co., USA, parametri di acquisizione: 120 kV p, 160 mA, tipici
di un normale esame clinico) dopo essere stati scongelati ed immersi in acqua
per prevenire artefatti di indurimento del fascio di radiazioni. È stato applicato
un protocollo di acquisizione elicoidale, con passo di avanzamento pari a 1.3 mm
dalla testa al piccolo trocantere e di 1.5 mm per la regione diafisaria e spessore del
fascio rispettivamente pari a 1 e a 5 mm. L’elaborazione ha restituito un dataset
ricostruito con slices di passo 1.3 mm nella zona tra la testa e il piccolo trocantere
e di 5 mm nella regione diafisaria e dimensione del pixel pari a 0.59 mm.
L’equazione di calibrazione densitometrica (correlazione tra HU e densità del
tessuto osseo), individuata in fase di acquisizione della tomografia tramite lo
2
disponibile su www.biomedtown.org
153
6 – Validazione della formulazione Meshless a celle locali con il Metodo delle Celle
“European Spine Phantom” [82], è risultata essere:
ρQCT = 0.000788343 HU − 0.00422356
h g i
cm3
(6.1)
essendo ρQCT il valore di densità “radiologica”
La relazione densità-elasticità è stata assunta dalla letteratura [83]:
1.49
E = 6.950 ρapp
[GP a]
(6.2)
dove ρapp rappresenta la densità apparente del tessuto3 .
La relazione tra densità radiologica ρQCT e densità minerale4 ρapp e tra questa e la
densità apparente ρapp sono state assunte dalla letteratura [87]:
ρQCT = 1.14ρash − 0.09
ρash = 0.6 ρapp .
(6.3)
Componendo queste relazioni si ottiene:
E = α [h (a HU + b) + k]β
con
a = 0.00069152894737
b = 0.07524249122807
h = 0.87719298245614
k = 0.078947368421053
α = 6850
β = 1.49
(6.4)
Il modulo di Poisson è stato assunto pari a 0.3 [84].
I modelli sono stati registrati spazialmente con il sistema di riferimento sperimentale misurando e riportando la posizione di alcuni punti di riferimento
(estensimetri, livello del cemento, punto di applicazione del carico). L’acquisizione della posizione dei punti è avvenuta tramite digitizer (MicroScribe 3DX, immersion Corporation, San Jose, CA, USA) con risoluzione pari a 0.2 mm; l’errore
di registrazione (avvenuta con algoritmo closest–point [88]) è risultato variabile
per i vari modelli tra 0.5 e 0.9 mm
3
essendo l’osso in prima approssimazione un materiale poroso la densità apparente esprime il
rapporto massa su volume totale di un campione
4
valutata per ignizione di un campione valutando il peso della frazione residua
154
6.1 – L’esperimento di riferimento
6.1.4 I modelli MCM
I modelli MCM sono stati costruiti direttamente a partire dai datset delle acquisizioni CT di ogni singolo femore.
Registrato il riferimento numerico con quello sperimentale, sono state replicate
le condizioni di carico e di vincolo di ogni singola prova: il dataset, a risoluzione
originaria, è stato “croppato” a livello del cemento (eliminando le informazioni a
quota inferiore a quelle dell’imposta della base di PMMA) e a tutti i punti della
superficie di base sono stati imposti spostamenti nulli, replicando il vincolo sperimentale di incastro. Le forze sono state applicate (con le componenti ottenute
dalla registrazione spaziale) al nodo del dataset più prossimo al punto di applicazione del carico sperimentale.
L’algoritmo MCM è stato applicato costruendo attorno ad ogni nodo una mesh
locale di tetraedri a 4 nodi appoggiati ai nodi prossimi secondo le direzioni di
allineamento della griglia del dataset CT. Ai nodi sono stati calcolati i valori di
E ottenuti a partire dai corrispondenti valori di HU con le relazioni riportate nel
paragrafo 6.1.3.
La dimensione dei modelli è risultata variabile tra 2998800 e 3764640 nodi.
Il solutore è stato costruito con un programma ad hoc in linguaggio C con chiamata a funzioni della libreria PETSc per l’esecuzione su architetture parallele; la
soluzione del sistema lineare risolvente è avvenuta con il metodo del Gradiente
Coniugato con tolleranza di ciclo pari a 1e − 7.
6.1.5 Definizione dell’accuratezza
L’elaborazione delle misure estensimetriche restituisce, per ogni estensimetro e
per ogni condizione di carico, i valori principali di deformazione sulla superficie
dell’osso. Questi valori sono stati usati come elemento di confronto per i valori
calcolati con il modello numerico nei punti corrispondenti alla posizione degli
estensimetri.
L’assunzione di stato piano di stress sulla superficie è alla base della procedura con cui sono stati determinati i valori principali di deformazione nel modello
FEM come descritto nel paragrafo 5.2.6 (sono assunti come valori di confronto i
valori principali di deformazioni associati alle direzioni principali di tensione cui
corrispondono i due valori di stress in valore assoluto più distanti dallo 0).
Per il modello MCM, invece, non vi sono assunzioni sulla definizione di superficie, e il segmento osseo viene considerato un continuum con il suo intorno, manipolando solamente valori di densità (e di modulo di elasticità) mappati sulla
griglia regolare di punti prodotta dall’acquisizione CT. Il calcolo del tensore di deformazione in un punto avviene derivando opportunamente la funzione interpolante gli spostamenti nodali del voxel che contiene quel punto. I valori principali
155
6 – Validazione della formulazione Meshless a celle locali con il Metodo delle Celle
di deformazione usati per il confronto con i dati sperimentali sono quindi ottenuti calcolando i valori principali nei punti sede degli estensimetri e escludendo,
dei tre valori, quello più prossimo allo zero.
6.2 Le criticità emerse
Il confronto dei valori di ottenuti con i modelli MCM hanno evidenziato due
criticità importanti della peocedura di modellazione descritta: la prima legata
all’attribuzione delle proprietà meccaniche desunte dai valori HU del datset, la
seconda di carattere più specificamente interpretativo, legata all’estrazione delle
informazioni per la valutazione di rispondenza con i dati sperimentali.
6.2.1 Attribuzione delle proprietà meccaniche nell’MCM
La comparazione macroscopica del campo di spostamenti nei modelli omologhi
MCM e FEM evidenziava una sistematica e consistente maggiore rigidezza del
modello MCM il quale registrava spostamenti massimi sistematicamente inferiori al FEM. Questo fatto era confermato anche dall’analisi puntuale dei valori di
deformazione sia in relazione ai dati sperimentali che in relazione alle predizioni
FEM.
La causa di questo fenomeno è stata individuata nella combinazione dell’equazione di correlazione tra HU e modulo di elasticità E con la particolare procedura
di modellazione in cui, per evitare ogni procedura di discriminazione tra tessuto
osseo e ambiente circostante, tutto il datset è stato oggetto della procedura di calcolo, ivi compresi i nodi collocati nell’acqua di contenimento del femore durante
l’acquisizione CT.
Quello che di fatto è venuto a crearsi è che, in virtú dell’adottato legame HU–E,
i nodi collocati nel materiale circostante il femore hanno ereditato una resistenza
meccanica che, pure di modesta entità, ha contribuito a creare un sostegno resistente circostante in grado di riprendere parte del carico applicato. Il fenomeno è
”suggerito“ dall’immagine di figura (6.4) che rappresenta il campo di HU di uno
dei femori, e in cui sono stati selezionati con colorazione opaca i punti con HU
superiore a 250 (valore corrispondente a valori di densità minerale caratteristici dell’osso corticale); l’immagine dà quindi una rappresentazione approssimata
della geometria ossea, indicando come però essa sia circondata da altro materiale:
nella particolare descrizione materiale adottata questo materiale, evidentemente
abbondante, assume una resistenza meccanica nel complesso non trascurabile.
Questo fatto è stato reso evidente dalla comparazione della funzione aggregata
156
6.2 – Le criticità emerse
Figura 6.4. Rappresentazione del campo HU del datset CT del femore denominato 2501: in opaco sono raffigurate le regioni del dataset con valore di HU >
250, corrispondente ad un valore di densità minerale indicativamente assimilabile a quello dell’osso corticale, presente nella regione distale del femore e sulla
superficie della regione prossimale
E–HU di figura (6.5) con lo spettro dei valori HU delle acquisizioni CT riportato in figura (6.6): si noti come le relazioni utilizzate prevedano che E si annulli
per valori negativi di HU; al contempo l’istogramma testimonia un elevatissimo
numero di punti con HU prossimo allo zero. Al valore HU = 0 (che corrisponde
all’acqua, nel caso specifico propriamente il materiale in cui è immerso il femore)
corrisponde un valore di E pari a circa 310 GP a. Questo fatto ha dunque originato una sezione resistente ampia attorno ad ogni femore, contribuendo alla
parziale distribuzione del carico e riducendo quindi le deformazioni, puntuali ed
aggregate, nel segmento osseo..
Questa considerazione ha suggerito di modificare l’equazione (6.4) facendola valere solo al di sopra di un valore di soglia HU , al di sotto del quale viene
assunto per E un valore convenzionale trascurabile5 :
(
α [h (a HU + b) + k]β se HU > HU
E =
(6.5)
1
se HU < HU
5
non nullo per evitare problemi di singolarità della matrice di rigidezza del problema
157
6 – Validazione della formulazione Meshless a celle locali con il Metodo delle Celle
Figura 6.5. Diagramma della relazione tra HU e modulo di elasticità E espresso
dalle relazioni di cui al paragrafo 6.1.3
Figura 6.6.
Istogramma delle frequenze di HU nel dataset di uno dei femori
Per la scelta del valore soglia HU ci si è rifatti al campo di validità sperimentale della definizione dell’equazione di calibrazione densitometrica: questa viene
158
6.2 – Le criticità emerse
infatti determinata in fase di acquisizione delle immagini CT, inserendo in coda
al/ai segmenti ossei, un supporto che alloggia tre soluzioni di idrossiapatite6 di
titolo (e dunque di densità) nota. La linearità rilevata tra unità HU e densità ha
un intervallo di validità il cui limite inferiore è ρQCT = 50 mg/cm3 ; questo valore,
corrispondente nei casi in oggetto ad un valore HU pari a 68, assunto come soglia
dell’equazione (6.5).
Va rilevato come questa assunzione abbia a priori un margine di arbitrarie-
Figura 6.7. Valori di deformazione in alcuni estensimetri nel modello MCM in
una delle prove al variare del valore di soglia HU dell’equazione (6.5)
tà: per contro a supporto di questa scelta, due considerazioni contribuiscono ad
avvalorare la validità del criterio adottato:
• la manipolazione manuale del dataset ha evidenziato come il valore di HU
pari a 68 non escluda porzioni di tessuto osseo, anche nelle regioni a minore
densità media, quali quelle prossimali, in cui l’osso ha struttura trabecolare;
• la variazione del valore di soglia nell’intorno del valore adottato ha evidenziato una sostanziale stazionarietà dei valori di deformazione calcolati in
6
sale calcio fosfato che rappresenta la frazione minerale tessuto osseo dove è presente in forma
cristallina, amorfa o mista
159
6 – Validazione della formulazione Meshless a celle locali con il Metodo delle Celle
corrispondenza degli estensimetri: il grafico di figura (6.7) evidenzia come
al variare del valore HU i valori di deformazione calcolati relativamente
ad uno dei femori in una stessa condizione di sollecitazione si mantengano
sostanzialmente stabili nell’intorno di HU = 68.
6.2.2 L’individuazione dei valori puntuali di deformazione
Sia con che senza soglia HU nell’attribuzione del modulo di elasticità, i valori
predetti in alcuni estensimetri sono risultati sistematicamente molto superiori sia
alle misure sperimentali che alle corrispondenti predizioni dei modelli FEM. A
fronte di una base di valori confrontabili, queste misure risultavano sistematicamente anomale sia nei valori in sè che nel comportamento globale del modello
MCM.
Verificando il posizionamento di questi punti sui dataset CT si è rilevato come
essi fossero collocati subito all’esterno dell’osso (con errore di qualche pixel nell’immagine) o in regioni di transizione tra tessuto osseo e matrice esterna (acqua)
che, per la risoluzione spaziale della tecnica di acquisizione delle immagini, risultano zone con densità a cavallo tra quella dell’osso e quella dell’acqua.
Questo fatto è direttamente imputabile alla combinazione di due errori nel posizionamento dei punti di misura (posizione sperimentale degli estensimetri) nel
riferimento del dataset CT:
• l’incertezza nel rilevamento della posizione degli estensimetri sulla superficie del femore, operazione che avviene con uno strumento (digitalizatore)
di risoluzione 0.2 mm;
• la registrazione tra il riferimento sperimentale e quello del dataset CT, operazione caratterizzata da una incertezza dell’ordine dei 0.5–0.9 mm.
Il casuale combinarsi di questi errori ha dunque ragionevolmente prodotto l’errata collocazione dei punti di indagine nel modello MCM che, avendo la risoluzione nativa del dataset CT, risulta estremamente sensibile (la risoluzione nativa
dell’acquisizione CT è pari, nel piano di ogni singola slice, a 0.59 mm).
Va rilevato come nel modello FEM questo problema non si ponga per due ragioni
sostanziali: innanzitutto in corrispondenza della posizione stimata dell’estensimetro sul femore viene collocato, sulla superficie del modello FEM un nodo, il
quale, a prescindere da errori di posizionamento, si troverà comunque ad essere
nodo di superficie; in secondo luogo le misure estratte dal modello FEM mediano
i valori calcolati ai centroidi di tutti gli elementi esterni (ossia aventi una faccia
sulla superficie) afferenti al nodo; questa operazione muove dalla considerazione che nella pratica sperimentale l’estensimetro ha una griglia di rilevazione che
160
6.3 – Validazione con le misure sperimentali
copre una superficie circolare di diametro pari a circa 3 mm, misura che incidentalmente corrisponde alla dimensione media degli elementi superficiali del
modello FEM.
Queste considerazioni hanno pertanto ispirato una strategia alternativa per il calcolo dei valori di deformazione in corrispondenza della posizione stimata degli estensimetri. Anziché considerare i valori principali di deformazioni calcolati nel punto geometrico corrispondente agli estensimetri, si adotta la seguente
procedura:
• si individua il voxel v in cui cade la posizione dell’estensimetro;
• si individua l’insieme V dei voxel limitrofi il cui centroide disti dal centroide
di v meno di un valore R (ossia si individuano i voxel il cui baricentro cada
entro una sfera di raggio R e di centro il baricentro di v);
• tra i voxel dell’insieme V si individua l’insieme VB dei voxel caratterizzati
dal fatto di avere valore medio di HU ai vertici maggiore della soglia HU ;
I valori di deformazione principale associati alla posizione nominale dell’estensimetro saranno quindi ottenuti mediando i valori principali calcolati ai centroidi
dei voxel dell’insieme VB .
Con la procedura descritta si è in grado di ottiene un’informazione che medi i valori alla scala dell’acquisizione, considerando i soli voxel interni al tessuto osseo.
Assumendo R apri a 2 mm si riesce infatti a tenere in considerazione da un lato
l’estensione della superficie di acquisizione sperimentale della deformazione (l’estensimetro ha forma circolare con diametro di circa 3 mm), dall’altro l’incertezza
del suo posizionamento nel riferimento del datset CT.
Il grafico di figura (6.8) illustra come varino le predizioni dei valori di deformazione ai vari estensimetri variando il valore di R; nel grafico vengono riportate 5
colonne per ogni misura: la prima corrisponde al valore sperimentale, la seconda
alla predizione FEM, la terza alla predizione MCM puntuale, le ultime due alle
predizioni MCM mediate con valore di R pari a 2 e a 3 mm: si nota come la mediazione con la procedura descritta elimini la presenza di valori non significativi
(corrispondenti a informazioni puntuali lette nella matrice acquosa); al contempo le predizioni con la procedura mediata risultano in prima approssimazione
stabili alla variazione di R.
6.3 Validazione con le misure sperimentali
Con la procedura appena descritta, i valori principali di deformazione predetti
dal modello MCM per varie condizioni di carico nei vari femori hanno un’elevata corrispondenza con i valori sperimentali: verificata l’indipendenza degli scarti
161
6 – Validazione della formulazione Meshless a celle locali con il Metodo delle Celle
Figura 6.8. Valori di deformazione nel femore 2501 per la condizione di carico
“neutral”: per ogni deformazione sono riportate nell’ordine: il valore sperimentale, la predizione FEM, la predizione MCM puntuale, le predizioni MCM mediate
con raggio pari, rispettivamente, a 3 e a 5 mm.
fra predizioni e misure sia dalle condizioni di carico che dall’esemplare di femore
(ANOVA fattoriale, p-value>0.05), predizioni e misure sono state analizzate nel
loro insieme, valutando i parametri di accuratezza a livello aggregato.
La retta di regressione delle predizioni MCM rispetto alle misure sperimentali
(con pendenza prossima all’unità, intercetta prossima allo zero e coefficiente R2
pari a 0.94) manifesta l’elevata correlazione tra predizioni e misure sperimentali.
Gli indicatori di accuratezza globale sono risultati essere soddisfacenti, essendo
162
6.3 – Validazione con le misure sperimentali
il valore di errore massimo pari al 47.77% e l’errore quadratico medio apri al
7.92 %. Come riportato in tabella (6.1), questi elementi di valutazione dell’accu-
Figura 6.9. Valori principali di deformazione sperimentali (asse x) e numerici
(asse y) ottenuti con i modelli MCM e FEM: valori aggregati per tutti gli 8 femori
e tutte le 6 condizioni di carico
ratezza delle predizioni del modello MCM sono risultati paragonabili ai valori
caratterizzanti le predizioni dei modelli FEM di riferimento
163
6 – Validazione della formulazione Meshless a celle locali con il Metodo delle Celle
strain correlation
MCM
FEM
R2
pendenza
intercetta
RMSE
RMSE %
Max. err.
Max. err. %
0.94
0.93
1.88
91.16
7.92%
552.31
47.99%
0.95
0.97
-1.50
83.11
7.22%
478.75
41.59%
Tabella 6.1. Parametri della retta di regressione e valori degli indicatori di accuratezza per le predizioni MCM e FEM: dati aggreganti i valori relativi a tutti i
femori in tutte le condizioni di carico
Nei grafici delle figure (6.11) e (6.12) sono riportati, a titolo di esempio, i confronti predizioni–misure nelle varie condizioni di carico relativamente ad uno
dei femori in esame che, per il suo carattere di generalità nel risultato dell’analisi,
assume in questo ambito valore paradigmatico come caso di riferimento per le
considerazioni sulle prestazioni del modello MCM.
L’analisi delle singole condizioni di carico riportate in figura (6.11), unitamente all’analisi per canale di acquisizione (i valori per alcuni singoli estensimetri
sono riportati in figura 6.12) evidenzia da un lato una ricorrente elevata correlazione tra predizioni e misure sperimentali dall’altro una variazione dei coefficienti angolari delle rette di regressione.
Queste osservazioni autorizzano ad affermare che il modello MCM sia in grado
di identificare bene la realtà sperimentale e che variazioni dei coefficienti angolari
delle rette di regressione possano venire attribuite ad un difetto nella definizione
delle proprietà materiali, imputabile a due fattori:
• gli artefatti dell’acquisizione CT (la risoluzione finita e non isotropa del
dataset produce noti effetti cosiddetti di “volume parziale”);
• la non propria assunzione di comportamento isotropo del materiale, legata all’assenza di metodi utilizzabili generali ed accurati per la caratterizzazione dell’anisotropia dell’osso: l’accertata anisotropia sia materiale che di
struttura, viene riprodotta con una disomogeneità spaziale di modulo di
elasticità sia nel modello MCM che nel modello FEM.
164
6.4 – Comparazione sistematica con modello FEM di riferimento
Figura 6.10. Femore 2506: rappresentazione aggregata delle deformazioni principali (predette vs sperimentali) per le varie condizioni di carico
6.4 Comparazione sistematica con modello FEM di riferimento
Al fine di approfondire il comportamento del modello MCM, è stato disposto un
confronto puntuale tra un modello MCM riproducente uno dei femori in una delle configurazioni di carico e il corrispondente modello FEM.
Il confronto indaga il comportamento relativo tra i due modelli, confronto nel
quale il FEM è assunto come riferimento non già quale “soluzione esatta” quanto piuttosto come migliore strumento validato attualmente disponibile nel riprodurre numericamente le misure sperimentali. Va anticipato che la valutazione del
comportamento relativo del modello MCM rispetto al FEM deve tenere presente,
165
6 – Validazione della formulazione Meshless a celle locali con il Metodo delle Celle
adduzione 3°
adduzione 8°
RMSE = 61,88 με (10,81%)
Max Err =179,56 με (31,38%)
5
RMSE = 62,54 με (12,31%)
Max Err = 191,62 με (37,73%)
neutral
estensione 3°
RMSE = 79,36 με (11,09%)
Max Err = 237,90 με (33,24%)
RMSE = 89,93 με (12,66%)
Max Err = 272,65 με (38,37%)
adduzione 24°
2
2
flessione 18°
7
RMSE = 100,75 με (11,62%)
Max Err =263,40 με (30,38%)
RMSE = 67,09 με (11,36%)
Max Err = 159,22 με (26,96%)
Figura 6.11. Valori principali di deformazione predetti e misurati nelle singole configurazioni di carico
166
6.4 – Comparazione sistematica con modello FEM di riferimento
Figura 6.12. Valori principali di deformazione predetti e misurati nelle varie
configurazioni di carico in alcuni singoli canali di acquisizione
quindi, quale sia il margine di “precisione” appurato nella validazione della modellazione FEM assunta a riferimento.
Oggetto del confronto sono i valori principali di deformazione calcolati ai centrodi degli elementi del dal modello FEM replicante la configurazione di carico
“neutral” del femore identificato come 2501.
Essendo i due modelli registrati spazialmente rispetto al medesimo riferimento, la procedura di confronto ha previsto:
• individuazione delle coordinate del centroide dell’elemento;
167
6 – Validazione della formulazione Meshless a celle locali con il Metodo delle Celle
• l’individuazione del voxel del modello MCM corrispondente al centroide
considerato;
• definizione della funzione di interpolazione trilineare dei valori delle componenti di spostamento ai vertici del voxel;
• calcolo dei valori principali del tensore di deformazione per derivazione
della funzione di interpolazione.
Questa procedura non è stata estesa a tutti gli elementi del modello FEM, essendo stati dal confronto esclusi alcuni elementi per i quali l’indagine non risultava
essere significativa: sono stati esclusi, nel dettaglio:
• gli elementi con centroide distante meno di un diametro femorale dalla base
di incastro (diametro valutato all’imposta dell’incastro): in questa zona si
hanno infatti fenomeni locali non significativi ai fini del confronto, verificata
la coerenza globale tra i due modelli in termini di campo di spostamenti;
• gli elementi di superficie del canale endostale del femore: in questa zona gli
elementi del modello FEM hanno inferiore qualità, posizionamento spesso
approssimativo, e dimensione eccessiva per riprodurre con accuratezza la
reale superficie interna dell’osso; questo fatto è primariamente dovuto alla minore accuratezza del processo di segmentazione del canale. Insieme a
ciò, l’elevata curvatura della superficie rende maggiormente difficoltosa la
creazione di elementi di buona qualità nel descrivere la superficie, a meno
di non fare ricorso ad elementi di dimensione ridotta: questa soluzione non
si rende però necessaria atteso il modesto contributo che questi elementi
forniscono al comportamento globale del modello, essendo posizionati in
una zona che, per le configurazioni di carico in esame, risulta scarsamente sollecitata. L’insieme di questi fattori fa sì che molti di questi elementi
abbiano il centroide collocato all’esterno del segmento osseo, producendo
quindi confronti privi di significato;
• gli elementi prossimi al punto di applicazione del carico, a distanza di meno
di 15 mm da esso.
La valutazione comparativa tra MCM e FEM ha considerato la differenza in valore assoluto tra i valori principali corrispondenti calcolati dai due modelli riferita
al valore predetto dal FEM:
δ ==
|εiM CM − εiF EM |
εiF EM
168
(6.6)
6.4 – Comparazione sistematica con modello FEM di riferimento
Figura 6.13. Confronto tra i valori principali di deformazione ai centroidi del
modello FEM: a sinistra è rappresentato il diagramma cumulativo della frequenza dell’errore percentuale delle predizioni MCM rispetto ai valori FEM; a destra
r̀iportata la distribuzione delle differenza con segno
Il grafico di figura (6.13) rappresenta il diagramma cumulativo della frequenza di δ: si evince una sostanziale concordanza tra i due modelli, espressa dal fatto
che circa il 60% dei valori ha uno scarto percentuale dai valori FEM entro il 10%;
entro uno scarto del 50% è compreso il 92.30% dei valori confrontati.
Il primo di questi due dati assume particolare rilievo se si considera che lo scarto
rispetto al FEM è dell’ordine dell’errore che caratterizza le predizioni FEM rispetto alle misure sperimentali. In altre parole entro questo scarto, non è dato
di sapere quale tra i due modelli (FEM e MCM) sia il più coerente con la realtà
sperimentale.
Le differenze nei valori che caratterizzano l’8% dei confronti possono essere ragionevolmente imputate a tre fattori principali:
• un primo elemento di “disturbo” è rappresentato dall’errore di posizionamento che caratterizza il modello FEM rispetto al riferimento del dataset
CT: questo fatto origina in fase di segmentazione quando viene definita la
superficie tassellizzata del segmento osseo, poi oggetto di descrizione matematica tramite patch di superfici NURBS. Al termine di questa procedura
il posizionamento del modello è a meno di un pixel (nel piano) rispetto al
datset CT, che costituisce invece il riferimento nativo del modello MCM.
Questo fatto può quindi generare un errore di “lettura delle informazioni”,
fatto particolarmente influente nelle regioni di confine;
169
6 – Validazione della formulazione Meshless a celle locali con il Metodo delle Celle
• I due modelli hanno risoluzioni non confrontabili: il modello MCM è costruito alla risoluzione nativa del dataset, laddove il modello FEM è caratterizzato da elementi di dimensione variabile (tendenzialmente crescente
dalla superficie all’interno): gli elementi del modello FEM mediano informazioni materiali (HU e quindi E associati ai punti contenuti) su un volume di dimensioni consistenti, laddove il calcolo attuato dall’MCM considera valori nodali alla risoluzione nativa (valori del polo e dei 6 satelliti).
Nelle regioni di tessuto spongioso, il tessuto osseo, organizzato in strutture denominate trabecole, è caratterizzato da un’elevata porosità che, anche laddove abbia scala inferiore alla risoluzione del dataset, determina comunque valori locali delle proprietà meccaniche ridotti, con conseguente
sovrastima locale delle deformazioni nel modello MCM. Va a tale proposito
rilevato come, al di là del confronto in oggetto, la procedura MCM possa
paradossalmente essere più pertinente al vero quando predica localmente,
nelle regioni a minore densità puntuale, maggiori deformazioni: il modello
MCM non discrimina in maniera dicotomica l’osso dal “non osso”, ma piuttosto mappa delle proprietà materiali (la densità, il modulo di elasticità, ...)
sui punti della griglia prodotta dal dataset CT, vedendo lo spazio come un
continuum descritto puntualmente;
• il confronto puntuale mette in relazione informazioni puntuali estratte da
due entità geometriche (il tetraedro e il voxel) di dimensioni ed estensione
spesso molto differenti tra loro: se gli elementi del tetraedro (in superficie)
hanno lato medio di 3 mm e risultano a forma regolare, il voxel da cui viene estratta l’informazione di deformazione nel modello MCM ha lato pari
a 0.59 mm e altezza variabile tra 1.3 mm nella regione prossimale e 5 mm
nella regione dello stelo. Questo fatto, rende peraltro impossibile attuare la strategia di mediazione sui voxel limitrofi descritta per il confronto
con i dati sperimentali, poiché non sussiste, in termini generali, conformità
geometrica tale da poter guidare la selezione dei voxel prossimi.
Queste considerazioni circa la natura locale delle differenze nelle predizioni delle deformazioni sono avvalorate dal confronto del modulo degli spostamenti ai
nodi, illustrato in termini relativi, nel grafico di figura (6.14), nel quale si evince
come i due modelli siano coerenti.
170
6.4 – Comparazione sistematica con modello FEM di riferimento
Figura 6.14. Distribuzione delle differenze nel modulo degli spostamenti: a sinistra è riportata la distribuzione cumulata dello scarto percentuale riferito al valore
|uM CM | − |uF EM |
del FEM
; a destra è riportata la distribuzione delle differenze
|uF EM |
con segno |uM CM | − |uF EM |
171
6 – Validazione della formulazione Meshless a celle locali con il Metodo delle Celle
172
Conclusioni
I modelli numerici tridimensionali subject specific, costruiti a partire da dataset di
immagini medicali, possono costituire uno strumento accurato di predizione del
rischio di frattura dei segmenti ossei. Ad oggi è stata affinata una metodologia
di modellazione basata sul Metodo degli Elementi Finiti (FEM): la procedura richiede la precisa definizione topologica della superficie di contorno del segmento
osseo e con un processo di modellazione complesso composto da differenti fasi
(scontornamento, descrizione matematica delle superfici di confine, generazione
della mesh e mappatura delle proprietà materiali) non tutte completamente automatizzate.
Benché questa procedura abbia dimostrato di poter ottenere un’elevata accuratezza nella predizione delle deformazioni di segmenti ossei in vitro, la sua applicabilità in ambito clinico risulta ancora limitata a causa della sua complessità:
la generazione di un modello completo a partire dai dati delle immagini diagnostiche richiede infatti un notevole impegno sia in termini di tempo richiesto
(tipicamente alcuni giorni) che di competenze specialistiche continuativamente
dedicate ad ogni singolo studio, fatto che rende praticamente impossibile una
sua applicazione su vasta scala con tempi contenuti.
Scopo della tesi era l’esplorazione di un approccio di modellazione alternativo, in grado di conservare i requisiti di robustezza, accuratezza e generalità, ma
caratterizzato da un maggiore grado di automazione, in grado cioè di approntare
e completare un’analisi con il minimo grado possibile di intervento specializzato. L’indagine si è concentrata su implementazioni innovative del Metodo delle
Celle (CM), un metodo numerico basato sulla formulazione discreta diretta delle
equazioni dei campi fisici: l’uso di variabili globali riferite agli elementi (spaziali
e temporali) di due complessi di celle (primale e duale) porta alla scrittura delle
equazioni di campo direttamente nella loro forma algebrica. La scelta di concentrare lo studio sul Metodo delle Celle è legata a più fattori: da un lato alcuni
elementi caratterizzanti il CM (semplictà concettuale e implementativa, attitudine ad affrontare sistemi geometricamente complessi e disomogenei, assenza di
singolarità prodotte da sorgenti o da vincoli concentrati) lo rendono adatto alle
173
applicazioni nell’ambito della biomeccanica ortopedica; dall’altro vi è una concordanza concettuale tra la filosofia dell’approccio discreto e la natura dell’informazione usata per la costruzione dei modelli numerici; in ultima analisi il CM
aveva manifestato di poter rendere accessibili alcuni strumenti (quali la formulazione quadratica con ordine di convergenza nativamente pari a 4 e un approccio
meshless di semplice formulazione) tali da costituire a priori motivo di interesse
e ragione di studio in un ottica non già solamente accademica quanto piuttosto
pratica e applicativa.
Lo studio ha dapprima sviluppato l’estensione della formulazione quadratica
ai problemi scalari e vettoriali tridimensionali; la sua applicazione alla soluzione
numerica dell’equazione di Laplace e alla soluzione di problemi di elasticità lineare ha confermato quanto già registrato nel caso bidimensionale relativamente
ai problemi scalari: un’opportuna costruzione del complesso duale consente al
CM di di ottenere nativamente ordini di convergenza superiori a quanto teoricamente previsto per il FEM nella sua formulazione ordinaria; ciononostante in
entrambi i casi le soluzioni sono risultate del tutto confrontabili con quelle ottenute da implementazioni FEM di codici commerciali avanzati, rendendo i risultati
significativi dal punto di vista teorico, ma non utili sotto il profilo applicativo;
in mancanza una maggiore precisione numerica ottenibile a parità di dimensione computazionale del problema, prevalgono i vantaggi costituiti da un metodo
di consolidata applicazione per il quale è disponibile una varietà di strumenti di
gestione e di calcolo evoluti e affidabili.
Il secondo ambito di indagine ha riguardato lo sviluppo di implementazioni meshless del CM, approcci nei quali la soluzione viene calcolata in punti tra i quali
non è richiesta la definizione di una connettività a livello globale. Sono stati sviluppati, nella loro impostazione formale e implementativa, tre differenti approcci:
questi approcci hanno in comune il fatto di scrivere l’equazione di bilancio con
riferimento a regioni tributarie definite localmente nodo per nodo. La prima delle ipotesi proposte usa un complesso locale di celle primali definito attorno ad
ogni nodo esaminato: le celle locali sono usate sia per definire la regione tributaria che per il calcolo, cella per cella, dei termini di flusso coinvolti nel bilancio
di nodo. Negli altri due approcci la regione tributaria è assunta come una figura
geometriche di forma elementare; il campo incognito è approssimato nell’intorno
di ogni nodo tramite una funzione analitica che interpola i valori (incogniti) del
nodo in esame e di un gruppo di nodi circostanti; due ipotesi sono state esplorate
circa la funzione interpolante: i polinomi ordinati di grado parziale uniforme e le
funzioni di base radiale.
Le formulazioni di questi approcci sono state verificate con dei test numerici di
confronto con le soluzioni teoriche sia relativamente ai campi scalari (soluzione
dell’equazione di Laplace) che relativamente al problema di elasticità lineare in
174
regime di piccoli spostamenti (problema della trave di Timoshenko). I tre metodi sono stati poi valutati nella prospettiva applicativa della realizzazione di
un modello numerico automaticamente costruito sui dati CT: l’approccio basato
sull’interpolazione con funzioni di base radiale ha incontrato ostacoli di carattere computazionale dovuti alla significativa complessità algebrica dell’espressione analitica dell’equazione di bilancio; questo approccio è stato quindi escluso
non essendo compatibile con le risorse algoritmiche dei software di Computer
Algebra System disponibili. Parimenti escluso è stato l’approccio basato sull’approssimazione mediante polinomi di grado parziale uniforme rispetto alle coordinate: il fatto di avere i nodi disposti su una griglia regolare produceva infatti
malcondizionamenti nella matrice di interpolazione per bassi gradi del polinomio, laddove, per gradi più elevati, si realizzava un’estrema complessità formale
unitamente all’asimmetria della distribuzione dei punti attorno ad ogni nodo di
volta in volta esaminato.
La formulazione meshless basata sulla definizione di un complesso locale di celle
primali si è invece rilevata adatta e di implementazione immediata: una mesh
locale di tetraedri viene definita per ogni punto del dataset CT con i nodi primi
vicini nell’allineamento di griglia; l’attribuzione delle proprietà materiali avviene direttamente dalle informazioni del dataset e l’imposizione delle condizioni di
vincolo e di carico risulta immediata.
L’applicabilità di questo approccio (denominato Meshless Cell Method, MCM) è
stata verificata replicando una prova sperimentale di carico su un segmento di
femore in vitro. Il modello è stato costruito su un dataset CT sottocampionato
(per ragioni di risorse computazionali disponibili) del campione osseo registrato
rispetto al riferimento sperimentale; i valori principali di deformazione registrati
in 13 siti anatomici significativi in 5 distinte configurazioni di carico in regime
elastico sono state lo strumento di valutazione. Confrontando i valori ottenuti
con il modello MCM nei punti corrispondenti alla posizione degli strumenti, si
è verificata una elevata correlazione (R2 = 0.85) delle predizioni; il coefficiente
angolare della retta di regressione (valori numerici – valori sperimentali) è risultato pari a 1.21 con intercetta pari a 36 µε; lo scarto quadratico medio rispetto alle
misure sperimentali è risultato pari al 16%, con un valore massimo pari a l 35.5%.
Verificatane l’applicabilità, la modellazione MCM è stata validata rispetto alle
misure sperimentali di deformazione di prove meccaniche in campo elastico condotte su 4 paia di femori in vitro. Misure di deformazione in 16 distinti siti anatomici e in 6 differenti configurazioni di sollecitazione hanno costituito l’elemento
di valutazione della precisione del metodo nell’identificare la realtà sperimentale. I modelli MCM di ciascun femore sono stati costruiti sui corrispondenti dataset CT a risoluzione nativa densitometricamente calibrati. L’analisi aggregata
ha confermato la buona capacità dell’MCM nel replicare le misure sperimentali:
il coefficiente di correlazione tra valori predetti e valori sperimentali è risultato
175
elevato (R2 = 0.94), la retta di regressione con pendenza pari a 0.93 e intercetta
pari a 1.88 µε, avendosi uno scarto quadratico medio pari del 7.92% e un valore
di picco pari al 48%. Questi valori sono risultati del tutto paragonabili a quelli
ottenuti dalle analisi FEM associate alle misure sperimentali.
Per comprendere il comportamento del modello MCM rispetto al metodo FEM di
riferimento è stato approntato un confronto sistematico con uno dei modelli FEM:
l’analisi è avvenuta comparando gli spostamenti ed i valori principali di deformazione ai centroidi degli elementi del modello FEM con i valori calcolati dal
modello MCM nei punti corrispondenti. L’analisi aggregata ha dimostrato una
piena corrispondenza tra i due modelli: nel dettaglio la concordanza nella definizione del campo di spostamenti avvalora l’ipotesi che la minima dispersione nei
valori principali di deformazione sia imputabile alla differente scala di dettaglio
con cui i due modelli sono definiti: il modello MCM a coglie infatti le prorpietà
materiali con la risoluzione nativa dell’acquisizione CT (pixel pari a 0.57µm) laddove il modello FEM è costruito con elementi di dimensione media dell’ordine
del millimetro.
Lo studio ha individuato dunque un processo di modellazione numerica di
segmenti ossei caratterizzato da un elevato grado di automaticità: il modello numerico viene costruito direttamente sul dataset CT in maniera indipendente dallo
specifico segmento osseo rappresentato; la procedura non richiede alcuna manipolazione e si è dimostrato poter ottenere accuratezze nella replicazione delle
misure sperimentali in vitro assolutamente concordi con quelle della procedura
FEM di riferimento. Sebbene la dimensione computazione dei modelli sia significativamente maggiore di quella dei corrispondenti modelli FEM (in virtú dell’utilizzo della risoluzione nativa dei dataset CT) e sebbene quindi il tempo di
calcolo di ogni singolo modello sia dell’ordine delle ore, va rilevato come l’elevata automaticità del processo rappresenti comunque un progresso relativamente
all’applicazione su vasta scala: l’impostazione di un calcolo richiede infatti poche elementari operazioni (selezione della regione di interesse e imposizione di
carichi e vincoli) che necessitano di pochi minuti di lavoro di un operatore essendo il resto del processo (costruzione, assemblaggio e soluzione del sistema lineare
risolvente) completamente autonomo; per contro un’analisi FEM, computazinalmente molto più leggera e di calcolo molto più rapido, necessita di una complessa
fase di pre–processing che richiede un impegno qualificato continuativo, fatto che
limita intrinsecamente il numero di analisi approntabili da uno steso operatore in
un dato tempo.
Oltre alla validazione del modello MCM, l’elaborato ha maturato alcuni risultati
di carattere teorico nello sviluppo del Metodo delle Celle: l’estensione ai problemi
scalari e vettoriali tridimensionali con interpolazione quadratica, ha confermato
come il CM possa ottenere ordini di precisione e convergenza paragonabili con
176
quelli ottenibili da sofisticati codici commerciali implementanti il FEM; sono poi
stati sviluppati e verificati alcuni approcci meshless per la soluzione di problemi
bidimensionali scalari e vettoriali che, conservando i vantaggi dell’assenza della creazione di una mesh, superano alcuni limiti che caratterizzano molte delle
formulazioni analoghe in ambito differenziale.
177
178
Bibliografia
[1] Mark S. Shephard. Update to: Approaches to the automatic generation
and control of finite element meshes. Appl Mech Rev, ASME, 49(10):S5–S14,
October 1996.
[2] P. L. George. Automatic Mesh Generation: Application to Finite Element
Methods. John Wiley & Sons, Inc., New York, NY, USA, 1991.
[3] D. Testi, M. Viceconti, A. Cappello, and S. Gnudi. Prediction of hip fracture
can be significantly improved by a single biomedical indicator. Ann Biomed
Eng, 30(6):801–7, 2002.
[4] M. C. Hobatho, R. Darmana, P. Pastor, J. J. Barrau, S. Laroze, and J. P. Morucci. Development of a three-dimensional finite element model of a human
tibia using experimental modal analysis. J Biomech, 24(6):371–83, 1991.
[5] Jean-Daniel Boissonnat and Bernhard Geiger. Three-dimensional reconstruction of complex shapes based on the delaunay triangulation. volume
1905, pages 964–975. SPIE, 1993.
[6] William E. Lorensen and Harvey E. Cline. Marching cubes: A high resolution 3d surface construction algorithm. SIGGRAPH Comput. Graph.,
21(4):163–169, 1987.
[7] D. Taylor and J. H. Kuiper. The prediction of stress fractures using a ’stressed
volume’ concept. J Orthop Res, 19(5):919–26, 2001.
[8] M. J. Ciarelli, S. A. Goldstein, J. L. Kuhn, D. D. Cody, and M. B. Brown.
Evaluation of orthogonal mechanical properties and density of human trabecular bone from the major metaphyseal regions with materials testing and
computed tomography. J. Orthop. Res., 9(5):674–82, 1991.
[9] R. J. McBroom, W. C. Hayes, W. T. Edwards, R. P. Goldberg, and A. A.
White. Prediction of vertebral body compressive fracture using quantitative
computed tomography. J. Bone Joint Surg. Am., 67(8):1206–14, 1985.
[10] T. S. Keller. Predicting the compressive mechanical behavior of bone. Journal
of Biomechanics, 27(10):1159–68, 1994.
[11] D. R. Carter and W. C. Hayes. The compressive behavior of bone as a twophase porous structure. J. Bone Joint Surg. Am., 59(7):954–62, 1977.
179
[12] J. C. Rice, S. C. Cowin, and J. A. Bowman. On the dependence of the elasticity and strength of cancellous bone on apparent density. J. Biomech.,
21(2):155–68, 1988.
[13] Dianna D. Cody, Fu J. Hou, George W. Divine, and David P. Fyhrie. Femoral structure and stiffness in patients with femoral neck fracture. Journal of
Orthopaedic Research, 18(3):443–448, 2000.
[14] K. J. Bozic, J. H. Keyak, H. B. Skinner, H. U. Bueff, and D. S. Bradford. Threedimensional finite element modeling of a cervical vertebra: an investigation
of burst fracture mechanism. J Spinal Disord, 7(2):102–10, 1994.
[15] J. C. Lotz, E. J. Cheal, and W. C. Hayes. Fracture prediction for the proximal femur using finite element models: Part i–linear analysis. Journal Of
Biomechanical Engineering, 113(4):353–360, 1991.
[16] M. Dalstra, R. Huiskes, and L. van Erning. Development and validation
of a three-dimensional finite element model of the pelvic bone. Journal Of
Biomechanical Engineering, 117(3):272–278, 1995.
[17] A. A. Edidin. Modeling the distribution of bone moduli in bone-implant systems.
Cornell University, Ithaca, NY, 1991.
[18] B. Merz, P. Niederer, R. Muller, and P. Ruegsegger. Automated finite element
analysis of excised human femora based on precision -qct. J. Biomech. Eng.,
118(3):387–90, 1996.
[19] P. M. Cattaneo, M. Dalstra, and L. H. Frich. A three-dimensional finite element model from computed tomography data: a semi-automated method.
Proc Inst Mech Eng H, 215(2):203–13, 2001.
[20] S. A. Marom and M. J. Linden. Computer aided stress analysis of long bones
utilizing computed tomography. J Biomech, 23(5):399–404, 1990.
[21] C. Zannoni, R. Mantovani, and M. Viceconti. Material properties assignment
to finite element models of bone structures: a new method. Med Eng Phys.,
20(10):735–40., 1998.
[22] T. V. Nguyen, J. R. Center, and J. A. Eisman. Femoral neck bone loss predicts
fracture risk independent of baseline bmd. J Bone Miner Res, 20(7):1195–201,
2005.
[23] E. F. Morgan, H. H. Bayraktar, O. C. Yeh, S. Majumdar, A. Burghardt,
and T. M. Keaveny. Contribution of inter-site variations in architecture to
trabecular bone apparent yield strains. J Biomech, 37(9):1413–20, 2004.
[24] Marco Viceconti and Fulvia Taddei. Automatic generation of finite element meshes from computed tomography data. Critical reviews in biomedical
engineering, 31(1-2):27–72, 2003.
[25] T. McInerney and D. Terzopoulos. Topology adaptive deformable surfaces for medical image volume segmentation. IEEE Trans Med Imaging,
18(10):840–50, 1999.
180
[26] L. Mosekilde, S. M. Bentzen, G. Ortoft, and J. Jorgensen. The predictive
value of quantitative computed tomography for vertebral body compressive
strength and ash density. Bone, 10(6):465–70, 1989.
[27] C. Bergot, V. Bousson, A. Meunier, M. Laval-Jeantet, and J. D.Laredo. Hip
fracture risk and proximal femur geometry from dxa scans. Osteoporosis
International, 13(7):542–550, July 2002.
[28] E. M. Lochmuller, O. Groll, V. Kuhn, and F. Eckstein. Mechanical strength
of the proximal femur as predicted from geometric and densitometric bone
properties at the lower limb versus the distal radius. Bone, 30(1):207–16,
2002.
[29] M. E. Taylor, K. E. Tanner, M. A. Freeman, and A. L. Yettram. Stress and
strain distribution within the intact femur: compression or bending? Med
Eng Phys, 18(2):122–31, 1996.
[30] Enzo Tonti. A direct discrete formulation of field laws: The cell method.
CMES, 2(2):237–258, 2001.
[31] Francesco Cesari. Calcolo matriciale delle strutture, volume 2. Pitagora
Editrice Bologna, 1997.
[32] L. B. Lucy. A numerical approach to the testing of the fission hypothesis.
Astronomical Journal, 82:1013–1024, December 1977.
[33] J. J. Monaghan. Smoothed particle hydrodynamics. Annual Review of
Astronomy and Astrophysics, 30(1):543–574, 1992.
[34] Q. Lin and J. Rokne. Construction and analysis of meshless finite difference
methods. Computational Mechanics, 37(3):232–248, February 2006.
[35] Villon P. Nayroles B., Touzot G. Generalizing the finite element method: Diffuse approximation and diffuse elements. JournalComputational Mechanics,
10(5):307–318, September 1992.
[36] T. Belytschko, Y. Y. Lu, and L. Gu. Element-free galerkin methods.
International Journal for Numerical Methods in Engineering, 37(2):229–256, 1994.
[37] W. K. Liu and Y. Chen. Reproducing kernel particle methods. International
Journal for Numerical Methods in Fluids, 20:1081–1106, 1995.
[38] J. M. Melenk and I. Babuska. The partition of unity finite element method:
Basic theory and applications. Computer Methods in Applied Mechanics and
Engineering, 139:289–314, 1996.
[39] E. Onate, S. Idelsohn, O. C. Zienkiewicz, and R. L. Taylor. A finite point
method in computational mechanics. applications to convective transport
and fluid flow. International Journal for Numerical Methods in Engineering,
39(22):3839–3866, 1996.
[40] T. J. Liszka, C. A. M. Duarte, and W. W. Tworzydlo. hp-meshless cloud method. Computer Methods in Applied Mechanics and Engineering, 139(1-4):263 –
288, 1996.
181
[41] N. Sukumar, B. Moran, and T. Belytschko. The natural element method.
International Journal for Numerical Methods in Engineering, 43:839–887, 1998.
[42] S. Shen S. N.Atluri. The Meshless Local Petrov-Galerkin (MLPG) Method. Tech
Science Press, 2002.
[43] T. Strouboulis, K. Copps, and I. Babuscaronka. The generalized finite element method: an example of its implementation and illustration of its
performance. International Journal for Numerical Methods in Engineering,
47(8):1401–1417, 2000.
[44] Sergio R. Idelsohn, Eugenio Onate, Nestor Calvo, and Facundo Del Pin. The
meshless finite element method. International Journal for Numerical Methods
in Engineering, 58(6):893–912, 2003.
[45] N. Sukumar, N. Moes, B. Moran, and T. Belytschko. Extended finite element method for three-dimensional crack modelling. International Journal
for Numerical Methods in Engineering, 48(11):1549–1570, 2000.
[46] Hui-Ping Wang and Dongdong Wang. Efficient meshfree computation with
fast treatment of essential boundary conditions for industrial applications.
Journal of Engineering Mechanics, 135(10):1147–1154, 2009.
[47] S.R. Idelsohn, E. Onate, and F. Del Pin. The particle finite element method: a
powerful tool to solve incompressible flows with free-surfaces and breaking
waves. International Journal for Numerical Methods in Engineering, 61(7):964–
989, 2004.
[48] Sergio R. Idelsohn and Eugenio Onate. To mesh or not to mesh. that is the
question... Computer Methods in Applied Mechanics and Engineering, 195(3740):4681 – 4696, 2006. John H. Argyris Memorial Issue. Part I.
[49] Vinh Phu Nguyen, Timon Rabczuk, Stephane Bordas, and Marc Duflot. Meshless methods: A review and computer implementation aspects.
Mathematics and Computers in Simulation, 79(3):763 – 813, 2008.
[50] Yi-Je Lim and Suvranu De. Real time simulation of nonlinear tissue response in virtual surgery using the point collocation-based method of finite spheres. Computer Methods in Applied Mechanics and Engineering, 196(31-32):3011
– 3024, 2007. Computational Bioengineering.
[51] Suvranu De, Jung Kim, Yi-Je Lim, and Mandayam A. Srinivasan. The point
collocation-based method of finite spheres (pcmfs) for real time surgery simulation. Computers & Structures, 83(17-18):1515 – 1525, 2005. Advances in
Meshfree Methods.
[52] Irina Ionescu, James E. Guilkey, Martin Berzins, Robert M. Kirby, and Jeffrey A. Weiss. Simulation of soft tissue failure using the material point
method. Journal of Biomechanical Engineering, 128(6):917–924, 2006.
[53] Ken C.L. Wong, Linwei Wang, Heye Zhang, Huafeng Liu, and Pengcheng Shi. Meshfree implementation of individualized active cardiac dynamics. Computerized Medical Imaging and Graphics, 34(1):91 – 103, 2010.
182
[54]
[55]
[56]
[57]
[58]
[59]
[60]
[61]
[62]
[63]
[64]
[65]
Image-Guided Surgical Planning and Therapy.
Chun Yang, Dalin Tang, Chun Yuan, William Kerwin, Fei Liu, Gador Canton, Thomas S. Hatsukami, and Satya Atluri. Meshless generalized finite
difference method and human carotid atherosclerotic plaque progression simulation using multi-year mri patient-tracking data. CMES, 28(2):95–108, 2
2008.
Ashley Horton, Adam Wittek, and Karol Miller. Subject-specific biomechanical simulation of brain indentation using a meshless method,
2007.
E. Pena, M.A. Martínez, B. Calvo, and M. Doblaré. Application of the natural element method to finite deformation inelastic problems in isotropic
and fiber-reinforced biological soft tissues. Computer Methods in Applied
Mechanics and Engineering, 197(21-24):1983 – 1996, 2008.
H. Y. Wu K. M. Liew and T. Y. Ng. Meshless method for modeling of human
proximal femur: treatment of nonconvex boundaries and stress analysis.
Computational Mechanics, 28(5):390–400, May 2002.
M. Doblaré, E. Cueto, B. Calvo, M.A. Martínez, J.M. Garcia, and J. Cegonino.
On the employ of meshless methods in biomechanics. Computer Methods in
Applied Mechanics and Engineering, 194(6-8):801 – 821, 2005.
James D. Lee, Youping Chen, Xiaowei Zeng, Azim Eskandarian, and Morton
Oskard. Modeling and simulation of osteoporosis and fracture of trabecular
bone by meshless method. International Journal of Engineering Science, 45(28):329 – 338, 2007.
Luigino Zovatto and Matteo Nicolini. Improving the convergence order of
the meshless approach for the cell method for numerical integration of discrete conservation laws. International Journal for Computational Methods in
Engineering Science and Mechanics, 8(5):273 – 281, september 2007.
Enzo Tonti and Federica Zarantonello.
Algebraic formulation of
elastostatics: the cell method. CMES, 39(3):201–236, 2009.
S. P. Timoshenko and N. Godier. Theory of Elasticity. McGraw Hill, 3rd
edition, 1987.
Charles E. Augarde and Andrew J. Deeks. The use of timoshenko’s exact solution for a cantilever beam in adaptive analysis. Finite Elements in Analysis
and Design, 44(9-10):595 – 601, 2008.
O. C. Zienkiewicz and Robert L. Taylor. The Finite Element Method - Basic Concepts and Linear Applications, volume 1. McGraw-Hill - London, iv edition,
1989.
Valeriano Comincioli.
Analisi Numerica Metodi Modelli Applicazioni.
MCGRAW-HILL, 1990.
183
[66] Luigino Zovatto and Matteo Nicolini. Extension of the meshless approach for the cell method to three-dimensional numerical integration of discrete conservation laws. International Journal for Computational Methods in
Engineering Science and Mechanics, 7(2):69–79(11), 2006.
[67] Charles A. Micchelli. Interpolation of scattered data: Distance matrices
and conditionally positive definite functions. Constructive Approximation,
2(1):11–22, December 1986.
[68] M. J. D. Powell. Radial basis functions for multivariable interpolation: a
review. pages 143–167, 1987.
[69] I. S. Raju, D. R. Phillips, and T. Krishnamurthy. A radial basis function
approach in the meshless local petrov-galerkin method for euler-bernoulli
beam problems. Computational Mechanics, 34(6):464–474, November 2004.
[70] X. Zhang, K. Z. Song, M. W. Lu, and X. Liu. Meshless methods based on
collocation with radial basis functions. Computational Mechanics, 26(4):333–
343, October 2000.
[71] Mehdi Tatari and Mehdi Dehghan. A method for solving partial differential equations via radial basis functions: Application to the heat equation.
Engineering Analysis with Boundary Elements, 34(3):206–212, March 2010.
[72] Martin D. Buhmann. Radial Basis Functions: Theory and Implementations.
Cambridge University Press, 2003. ISBN 978-0-521-63338-3.
[73] M. D. Buhmann. Radial basis functions. Acta Numerica, 9(-1):1–38, 2000.
[74] Frédéric Magoulès, Luis A. Diago, and Ichiro Hagiwara. Efficient preconditioning for image reconstruction with radial basis functions. Advances in
Engineering Software, 38(5):320–327, May 2007.
[75] J. Park and I. W. Sandberg. Universal approximation using radial-basisfunction networks. Neural Computation, 3(2):246–257, 1991.
[76] Fulvia Taddei, Martino Pani, Luigino Zovatto, Enzo Tonti, and Marco Viceconti. A new meshless approach for subject–specific strain prediction in
long bones: Evaluation of accuracy. Clinical Biomechanics, 23(9):1192 – 1199,
2008.
[77] Fulvia Taddei, Luca Cristofolini, Saulo Martelli, H.S. Gill, and Marco Viceconti. Subject-specific finite element models of long bones: An in vitro evaluation of the overall accuracy. Journal of Biomechanics, 39(13):2457 – 2467,
2006.
[78] M. Viceconti, A. Toni, and A. Giunti. Experimental Mechanics. Technology
Transfer Between High Tech Engineering and Biomechanics, chapter Strain guage
analysis of hard tissues: factors influencing measurements. Elsevier, 1992.
[79] G. Bergmann, G. Deuretzbacher, M. Heller, F. Graichen, A. Rohlmann,
J. Strauss, and G. N. Duda. Hip contact forces and gait patterns from routine
activities. Journal of Biomechanics, 34(7):859 – 871, 2001.
184
[80] Debora Testi, Cinzia Zannoni, Angelo Cappello, and Marco Viceconti.
Border-tracing algorithm implementation for the femoral geometry reconstruction. Computer Methods and Programs in Biomedicine, 65(3):175 – 182,
2001.
[81] Fulvia Taddei, Enrico Schileo, Benedikt Helgason, Luca Cristofolini, and
Marco Viceconti. The material mapping strategy influences the accuracy of
ct-based finite element models of bones: An evaluation against experimental measurements. Medical Engineering & Physics, 29(9):973–979, November
2007.
[82] Willi A. Kalender, Dieter Felsenberg, Harry K. Genant, Manfred Fischer, Jan
Dequeker, and Jonathan Reeve. The european spine phantom – a tool for
standardization and quality control in spinal bone mineral measurements
by dxa and qct. European Journal of Radiology, 20(2):83 – 92, 1995.
[83] Elise F. Morgan, Harun H. Bayraktar, and Tony M. Keaveny. Trabecular
bone modulus-density relationships depend on anatomic site. Journal of
Biomechanics, 36(7):897 – 904, 2003.
[84] Dieter Christian Wirtz, Norbert Schiffers, Thomas Pandorf, Klaus Radermacher, Dieter Weichert, and Raimund Forst. Critical evaluation of known bone material properties to realize anisotropic fe-simulation of the proximal
femur. Journal of Biomechanics, 33(10):1325 – 1330, 2000.
[85] Marco Viceconti, Sigbjorn Olsen, Lutz-P. Nolte, and Kim Burton. Extracting clinically relevant data from finite element simulations. Clinical
Biomechanics, 20(5):451–454, June 2005.
[86] Enrico Schileo, Fulvia Taddei, Andrea Malandrino, Luca Cristofolini, and
Marco Viceconti. Subject-specific finite element models can accurately predict strain levels in long bones. Journal of Biomechanics, 40(13):2982 – 2989,
2007.
[87] Enrico Schileo, Enrico Dall’Ara, Fulvia Taddei, Andrea Malandrino, Tom
Schotkamp, Massimiliano Baleani, and Marco Viceconti. An accurate estimation of bone density improves the accuracy of subject-specific finite
element models. Journal of Biomechanics, 41(11):2483 – 2491, 2008.
[88] P. J. Besl and N. D. McKay. A method for registration of 3-d shapes. IEEE
Transactions on Pattern Analysis and Machine Intelligence, 14:239–256, 1992.
185