1
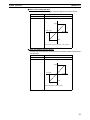
Section 3-3 System Functions Torque Control The Torque Control mode is used to apply a fixed torque, independent of the travelling speed. This mode can be used for specific applications which require a constant pressure. To set up a Motion Application with Torque Control, the following setting in the Servo Driver is required. Parameter No. Parameter Name Required Setting Pn000.1 Control Mode Selection 9 Explanation Torque / Speed Control The output no. 16 is used to control the switch between speed and torque control during operation. Speed control will be applied when OP(16)=OFF, and torque control will be enabled when OP(16)=ON. The torque control reference value is set by the T_REF axis parameter. Speed Control Torque Control Speed Control Time OP(16) OFF ON OFF ■ Torque Reference The torque applied to the Servomotor is proportional to the torque reference value defined by the T_REF axis parameter. The torque reference characteristics are given in the following graph. Applied Torque [% of rated torque] Max. torque (+) T_RATE Rated torque (+ 100%) 1 Torque reference -15000 15000 Rated torque (- 100%) Max. torque (-) The torque characteristics are Servomotor dependent. The actual applied torque of the Servomotor as percentage of the rated torque can be determined by using the T_RATE axis parameter. Applied Torque [% of rated torque] = T_REF ⋅ T_RATE 49