1
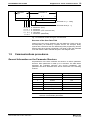
ECODRIVE03 FGP-01VRS 6-33 Operating Modes • Minimum jerk value If accel values are parametrized too small, then this could mean that the parametrized speed is not reached. What results is the socalled "Triangular mode". Directional change within a following block chain Note: If a directional change takes place when changing block n to block n+1 of a following block, then mode "Switching to target position with halt" must be used for block n to even enable dead beat behavior. Following block n with mode 1 following by following block with intermediate halt, because a change in direction occurs when changing from block n to block n+1. Explanation This means there is a sign change for the speed for target position n+1. If the accel parametrized in block n+1 is too small to decel within the path difference = Xn+1-Xn from speed vn to value 0, then the parmetrized target position Xn+1 will be overrun. This can cause software or hardware limit switches to trigger. v passing the target position s peed profile area equals distance by which target position block 2 is overrun Standstill window target position, block1 block selection acknowledgement target position, block 2 x=600 target position, block 3 01 ~01 01 02 03 AH target position reached S-0-0182, Bit1 strobe t Positioning inputs valid, for example positioning block, 1 Positioning acknowledgement outputs show the negated status of the positioning inputs Positioning acknowledgement outputs do not show that after valid record acceptance the position inputs are in an inverted condition, for example positioning block, 2 SV5020d1.FH7 Fig. 6-34: Parametrizing a following block with directional change Note: DOK-ECODR3-FGP-01VRS**-FKB1-EN-P In this case it is urgently necessary to take the above rule of thumb into account for minimum acceleration to avoid overshooting of position!