1
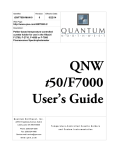
M(s) = P/I = Kt/Js2 = 500/s2 [rad/A] Amp Ka = 4 [Amp/V] DAC Kd = 0.0003 [V/count] Encoder Kf = 4N/2π = 318 [count/rad] ZOH 2000/(s+2000) Digital Filter KP = 12.5, KD = 245, T = 0.001 Therefore, D(z) = 1030 (z-0.95)/Z Accordingly, the coefficients of the continuous filter are: P = 50 D = 0.98 The filter equation may be written in the continuous equivalent form: G(s) = 50 + 0.98s = .098 (s+51) The system elements are shown in Fig. 10.7. V Σ FILTER ZOH DAC AMP MOTOR 50+0.980s 2000 S+2000 0.0003 4 500 S2 ENCODER 318 Figure 10.7 - Mathematical model of the control system The open loop transfer function, A(s), is the product of all the elements in the loop. A = 390,000 (s+51)/[s2(s+2000)] To analyze the system stability, determine the crossover frequency, ωc at which A(j ωc) equals one. This can be done by the Bode plot of A(j ωc), as shown in Fig. 10.8. Chapter 10 Theory of Operation • 166 USER MANUAL