1
Meteorological Bulletin M3.2
User Guide to ECMWF
forecast products
Anders Persson
Designed, edited and printed by ECMWF
User Guide to ECMWF forecast products 3.1 6 August 2001
© Copyright 2001 ECMWF
2
User Guide to ECMWF forecast products 3.1
Preface ............................................................................. 7
1. The European Centre for Medium-Range Weather Forecasts an historical background.................................................. 9
1.1 The early history of Numerical Weather Prediction .....9
1.2 The creation of ECMWF.............................................11
1.3 The ECMWF forecasting model since 1979 ...............12
1.3.1 Improvements in medium range forecasts.......14
2. The ECMWF global atmospheric model................... 17
2.1 The model formulation................................................17
2.1.1 The model equations .......................................17
2.1.2 The resolution in time and space.....................18
2.1.3 The numerical formulation..............................20
2.2 Parametrization of physical processes.........................21
2.2.1 The model orography ......................................21
2.2.2 The Planetary Boundary Layer........................23
2.2.3 Radiation .........................................................25
2.2.4 Clouds..............................................................25
2.2.5 The hydrological cycle ....................................27
2.3 The ocean wave forecast .............................................28
2.4 The seasonal forecast system ......................................30
3. The data assimilation and analysis system ................ 33
3.1 Introduction .................................................................33
3.2 The ECMWF analysis cycle........................................33
3.3 Data availability ..........................................................33
3.4 Data pre-selection........................................................34
3.5 Quality control of observations ...................................35
3.6 The 4DVAR analysis procedure..................................36
3.7 Structure functions ......................................................37
3.8 No analysis is perfect ..................................................38
3.9 Monitoring of the data assimilation system ................38
3.10 Future developments of data assimilation ................41
4. The Ensemble Prediction System (EPS).................... 43
4.1 Introduction .................................................................43
4.2 The spread of forecast errors .......................................43
4.3 The ECMWF ensemble prediction system .................46
4.4 Perturbations................................................................47
4.4.1 The calculations of perturbations ...................47
4.4.2 The simulation of model errors .......................49
4.4.3 Simulating uncertainties in the Tropics...........49
3.1
3
4.5 Spread–skill.................................................................49
4.5.1 Basic interpretation of the spread....................49
4.5.2 The provision of alternatives...........................50
4.5.3 The spread is not a unique value .....................50
4.6 EPS clustering .............................................................50
4.6.1 The operational clustering...............................50
4.6.2 The “tubing” clustering ...................................52
4.6.3 No ideal clustering ..........................................52
5. The forecast products.................................................53
5.1 The operational schedule.............................................53
5.2 Direct model output.....................................................53
5.3 Dissemination products ...............................................54
5.4 Products on the GTS ...................................................57
5.5 Data archives ...............................................................57
5.6 Access to archived data ...............................................58
5.7 Retrieving data from the ECMWF archives................58
5.7.1 Temporal resolution ........................................58
5.7.2 Horizontal and vertical resolution ...................58
5.7.3 Orography........................................................60
5.7.4 Islands and peninsulas.....................................60
5.7.5 Interpolation ....................................................60
6. The verification of ECMWF forecasts.......................63
6.1 The standard verifications of deterministic forecasts..63
6.1.1 RMSE – a simplified analysis .........................64
6.1.2 Understanding RMSE verifications ................65
6.1.3 Interpretation of the RMSE .............................67
6.1.4 Interpretation of the ACC................................68
6.1.5 Measures of dynamic activity .........................68
6.2 Hit rate and False alarm rate .......................................69
6.3 Verification of probabilistic forecasts .........................70
6.3.1 The Brier score ................................................70
6.3.2 The reliability, resolution and uncertainty ......71
6.3.3 Talagrand diagram...........................................74
6.4 Skill scores ..................................................................75
6.4.1 The Brier Skill Score.......................................75
6.4.2 The ROC diagram ...........................................75
6.4.3 The Rank Probability Score (RPS and CRPS) 76
6.5 Decision making from meteorological information ....76
6.5.1 Decision making from categorical forecasts ...76
6.5.2 A clarifying example.......................................77
6.5.3 The need of forecast information ....................78
4
3.1
7. The use of deterministic medium range forecasts ..... 79
7.1 Introduction .................................................................79
7.2 What can the forecaster do? ........................................79
7.3 Scale and predictability ...............................................80
7.4 The day–to–day inconsistency ....................................82
7.4.1 Consistency and skill? .....................................84
7.4.2 Beware of consistent forecasts!.......................86
7.4.3 The poor man’s ensemble approach................86
7.4.4 Misleading “systematic errors” .......................86
7.5 Statistical interpretation of deterministic forecasts .....88
7.5.1 Non-adaptive interpretations ...........................88
7.5.2 Adaptive interpretative methods .....................88
8. The use of the Ensemble Prediction forecasts ........... 91
8.1 Deterministic use of EPS.............................................92
8.1.1 The ensemble mean .........................................92
8.1.2 The ensemble spread .......................................92
8.1.3 The combined use of mean fields and spread..92
8.2 Mixed deterministic-probabilistic use of EPS.............92
8.2.1 Interpreting clusters and tubes.........................95
8.2.2 “Similar” clusters not similar ..........................95
8.2.3 The effect of averaging....................................95
8.2.4 Interpretations of spread measures ..................95
8.2.5 Correlation between spread and skill ..............96
8.2.6 There is mostly something to be certain about 96
8.2.7 Different parameters have different spreads ...96
8.3 Probabilistic use of EPS ..............................................97
8.3.1 Probability maps..............................................97
8.3.2 “Alarm bell” maps...........................................97
8.3.3 Combined events .............................................99
8.3.4 Probabilities over longer time intervals...........99
8.3.5 The EPS meteogram......................................100
8.4 Statistical post–processing of EPS products .............102
8.4.1 Calibration .....................................................102
8.4.2 Statistical interpretation.................................102
8.4.3 Climatological weather type classification....103
8.5 What value can the forecaster add to the EPS? .........104
8.5.1 Systematic errors ...........................................104
8.5.2 Non-systematic errors....................................104
8.5.3 Spread and predictability...............................104
8.5.4 Interpreting probabilities ...............................105
8.5.5 Forecasts of extreme events ..........................105
3.1
5
8.6 Some general recommendations for realtime use ....106
9. Epilogue ...................................................................107
10. References and further literature............................108
10.1 ECMWF documentation and publications ..............108
10.1.1 Newsletter....................................................108
10.1.2 Bulletins and memoranda............................108
10.1.3 Proceedings and reports ..............................108
10.1.4 Documentation ............................................109
10.2 User Guide references .............................................109
10.2.1 Analysis system...........................................109
10.2.2 Forecast model ............................................111
10.2.3 Ensemble prediction....................................113
10.2.4 Ocean wave modelling ................................113
10.2.5 Use of products............................................114
6
3.1
Preface
Preface
This meteorological User Guide is not like most other “user guides”, which
provide clear and straightforward instructions how to “plug in”, “get started”, “execute” and “switch off”. Nor is this Guide a handbook in NWP, dynamic meteorology or weather forecasting; these objectives are also already served by existing
literature. The aim of the Guide is to facilitate the use of conventional ECMWF
medium range forecast products and encourage the use of newer, more advanced
products such as the wave forecasts, seasonal forecasts and forecasts from the
Ensemble Prediction System. It tries to do this by providing:
1. A brief description of the forecast system. This will include numerical
techniques, the characteristics of the forecast model, the data assimilation and
analysis and the Ensemble Predictions System (EPS). If possible, the strong and
weak sides of the components are addressed already at this stage. In a separate
chapter, the full list of disseminated products is given, together with suggestions
how to solve meteorological problems related to the retrieval and plotting of meteorological fields.
2. An introduction to forecast verifications and their interpretation. Although
the statistical verifications as such are objective, any final conclusion drawn from
them is in the end subjective in the sense that it depends on what one is trying to
achieve. What looks like “good statistics” might sometimes be due to a rather bad
forecast performance; a genuine improvement of a forecast system might show up
as an increase in errors. It is therefore also important to realize the distinction
between “error”, “skill” and “usefulness”.
3. Recommendations on how to interpret and make use of the NWP products.
Experience shows that unawareness of basic principles of interpreting NWP products, in particular medium-range forecasts, can seriously worsen the meteorological value of the final forecast. Experience shows that forecasters can add
substantial value, provided they know where to direct their efforts. For automatic
use of the forecasts products, methods for statistical interpretation or adaptation are
briefly presented.
In this User Guide much emphasis is laid on the Ensemble Prediction System. It is in the literature sometimes portrayed as a new, revolutionary way of making weather forecasts, when it is rather a logical development of traditional weather
forecasting, which has always been about trying to tell what is most likely to happen, what might happen and what will probably not happen. What is new with the
3.1
7
Preface
EPS is that for the first time this uncertainty can be evaluated in an objective and
consistent way.
What is also new with the EPS is that it provides an overwhelming amount of
information and offers an almost unlimited combinations of products. While the
forecasters in the past had to make sense out of thousands of SYNOP, SHIP, TEMP
and PILOT reports, coming out from the telecommunication lines to provide the
best weather forecast service, they will in the future have to make sense out of 10100 times this amount of information, coming out from the computers. It is a challenge to the forecaster to convey the relevant parts of the EPS information to the
end-customers or the public, taking the system’s shortcomings into account.
Even if the forecasters cannot always improve on the predictive information,
they can take comfort from the fact that however much the NWP systems
improves, the public will always credit them with all the good forecasts.
Acknowledgement: This Guide is the fruit of several years of discussions
with scientists, working at EMWF as Staff Members, Consultant or visiting scientists and, most importantly, meteorological forecasters on the ECMWF Training
Courses, workshops and during Member State visits. It has been the interaction
with these two specialized groups, trying to draw the scientific consequences of the
forecasters’ experiences, trying to see the practical implications of the scientific
exploration, which has been the main driving force and inspiration for this work.
8
3.1
1.The European Centre for Medium-Range Weather Forecasts - an historical background
1. The European Centre for MediumRange Weather Forecasts - an
historical background
The European Centre for Medium Range Weather Forecasts (ECMWF) is the
consequence of 100 years of development in dynamic and synoptic meteorology,
and fifty years of development in numerical weather prediction (NWP). This time
has seen periods of optimism vary with pessimism, during which a slow but steady
improvement of the quality of the weather forecasts has been made
1.1 The early history of Numerical Weather Prediction
A century ago, in 1904, the Norwegian hydrodynamist V. Bjerknes suggested
that the weather could be quantitatively predicted by applying the complete set of
hydrodynamic and thermodynamic equations to carefully analysed initial atmospheric states. Lacking both the theoretical and practical means to make any quantitative predictions he initiated instead the qualitative approach that has became
known as the "Bergen School".
After the Second World War two technological developments appeared to
make mathematical weather forecast along the lines suggested by Bjerknes possible: the establishment of a hemispheric network of upper–air stations and the
development of the first electronic computers. In 1948 a young meteorological theoretician, Jule Charney, succeeded to derive simplified mathematical models of the
atmospheric motions, based on the quasi–geostrophic approximations. These equations would be able to forecast the large scale flow in spite of minor inaccuracies in
the initial analyses.
When the first NWP experiments were conducted in 1950, due to the limited
computer capacity, only the most simple of Charney’s models could be used, the
barotropic equation of atmospheric motion. The results were surprisingly successful: the general 500 hPa flow pattern over North America was forecast 24 hours in
advance with greater skill than previous subjective methods.
From this successful start two different strategies developed: countries with
limited computer resources, preferred to explore the potential of the barotropic
model, whereas countries like the US and Britain took a more ambitious approach
by developing baroclinic models where forecasts of vertical motion were possible.
It soon turned out that the nature of the problem was much more complicated than
envisaged. That is why during the 50’s the first operationally useful NWP forecasts
3.1
9
1.The European Centre for Medium-Range Weather Forecasts - an historical
were barotropic: in Sweden in 1954, in the US in 1958 and Japan in 1959. Only in
1962 could the US launch the first operational quasi–geostrophic baroclinic model,
followed by Britain in 1965. By that time, work was already under way, to introduce more realistic numerical models, based on the primitive equations (PE).
In a PE-model changes in wind and geopotential fields are not restricted by
any quasi-geostrophic constraint, but are allowed to interact freely. The physical
parametrizations such as convection, which are difficult to handle in the quasi–
geostrophic model, could now be realistically incorporated, so that the tropical
regions, essential for forecasts over Europe beyond two or three days, can be
included. The first global PE model began operating in 1966 at NMC Washington,
with a 300 km grid and six–layer vertical resolution. During the 70’s several other
PE models were implemented, global, hemispheric or as Limited Area Models,
which ran with a higher resolution over a smaller area and took boundary values
from a larger hemispheric or global model.
Interest in ocean wave forecasting started during the Second World War
when it was realised that information on the sea state could be of vital importance.
The first operational predictions were based on the use of empirical wind sea and
swell laws. An important advance was the introduction of the concept of a wave
spectrum in the mid 1950’s, followed by a dynamical equation describing the evolution of the wave spectrum, the energy balance equation.
During the 1980’s it became evident that wave forecasts did not only have an
intrinsic value, but that they also provide a means for increased realism of the
atmospheric system through incorporating the friction the waves except on the
wind, which on its turn affects the ocean circulation and the storm surge. Ultimately, it is expected to have a model consisting of the atmosphere and the oceans
where the ocean waves are the agent that transfer energy and momentum across the
interface in accordance with the energy balance equation. Presently, we have taken
the first step by coupling the IFS atmospheric model with the wave model in a twoway interaction mode.
This coupled model provides the 10 day weather and wave forecast since the
29th of June 1998. As a next step ECMWF is developing a coupled atmosphere,
ocean-wave, ocean-circulation model. This coupled model will be used in seasonal
forecasting and monthly forecasting in the near future.
With the increasing number of satellites providing observations also from the
upper atmosphere, the atmospheric models have been extended to ever higher altitudes. One of the major breakthroughs in the last 15 years in NWP came from an
enormous improvement in data assimilation techniques together with the availabil-
10
3.1
1.The European Centre for Medium-Range Weather Forecasts - an historical background
ity of an increasing number of remotely sensed observations from satellites, providing a global and high frequency data coverage. The development of variational
techniques has progressively allowed for a direct assimilation of infrared and
microwave sounder radiances which impact on analysed temperature and humidity
fields. This technique also ensures that the information coming from satellites is
dynamically consistent.
Recent studies have shown that in terms of NWP performance, satellite
observations are now equally important as radiosondes, not only in the Southern
Hemisphere (void of conventional observations), but also in the Northern Hemisphere
1.2 The creation of ECMWF
From the experience gathered with short–range and climatological simulations, there was, in the late 60’s, enough know–how to motivate an attack on the
medium–range forecast problem, defined as the interval from 3 to 10 days ahead.
The scientific and technical problems were still formidable, and only few countries
had enough expertise to tackle them. This made medium–range forecasting an
ideal candidate for multi–national co–operation. When a PE model began operating in the USA in 1966, there were moves in Europe to build up a similar system.
In October 1967 the Council of Ministers of the European Communities
adopted a resolution to implement a programme to promote joint scientific and
technical research. A proposal for a "European Meteorological Computer Centre
for Research and Operations" occupied the first place on a list of meteorological
projects submitted by an expert group in April 1969. The proposal was accepted
and other European nations were invited to participate. In April 1970 an expanded
expert group initiated two study groups to look into the economic and scientific
motivations for the project.
The reports from the two groups were completed in August 1971, and at the
conference of ministers in the same year it was decided to create the European
Centre for Medium–Range Weather Forecasts. The ambition, laid out in the plans,
was to produce forecasts ten days ahead with the five–day forecasts having the
same accuracy as subjective two–day forecasts in the 50’s.
The ECMWF convention was signed in October 1973. Seventeen European
States are currently members: Belgium, Denmark, Germany, Spain, France,
Greece, Ireland, Italy, the Netherlands, Norway, Austria, Portugal, Switzerland,
3.1
11
1.The European Centre for Medium-Range Weather Forecasts - an historical
Finland, Sweden, Turkey and the United Kingdom. The objectives of the Centre
were laid down as follows:
•
•
•
•
•
•
•
•
To develop dynamic models of the atmosphere with a view to preparing medium–range
weather forecasts by means of numerical methods;
To prepare, on a regular basis, the data necessary for the production of medium–range weather
forecasts;
To carry out scientific and technical research directed towards the improvement of these forecasts;
To collect and store appropriate meteorological data;
To make available to the meteorological offices of the Member States, in the most appropriate
form, the results of the studies and research provided for in the first and third objectives above
and the data referred to in the second and fourth objectives;
To make available a sufficient proportion of its computing capacity to the meteorological
offices of the Member States for their research, priority being given to the field of numerical
forecasting. The allocation of the proportions would be determined by Council;
To assist in implementing the programmes of the World Meteorological Organization;
To assist in advanced training for the scientific staff of the meteorological offices of the Member States in the field of numerical weather forecasting.
Since 1979 cooperation agreements have been concluded with Iceland, Hungary,
Croatia, Slovenia, Czech Republic, WMO, EUMETSAT and ACMAD.
The first operational forecast was produced on 1 August 1979. Every day
ECMWF makes a forecast to ten days ahead, and distributes it from its computer
system to the systems of the national meteorological services of its Member States
via a dedicated telecommunication network.
1.3 The ECMWF forecasting model since 1979 – an overview
The ECMWF forecasting system consists of three components: a general circulation model (coupled with an ocean wave model), a data assimilation system
and, since 1992, an ensemble forecast system.
The first ECMWF numerical model was a grid–point model with 15 levels in
the vertical up to 10 hPa. The horizontal resolution was 1.875 degrees of latitude
and longitude, corresponding to a grid length of 200 km on a great circle. In April
1983 this grid–point model was replaced by a model with a spectral representation in the horizontal with a triangular truncation at wave–number 63. The spectral
technique was more accurate than the grid point model for the same computational
cost. With today’s high resolutions with both grid point and spectral models there
is no longer any significant difference in accuracy. The semi-lagrangian technique
12
3.1
1.The European Centre for Medium-Range Weather Forecasts - an historical background
(see 2.1.3) removes one source of difference between the two methods. The
number of levels in the vertical was increased to 16. In May 1985 the spectral truncation was extended to wave–number 106. The number of levels was increased to
19 in 1986.
In September 1991, a high resolution spectral model was put into operations, where the spectral truncation was extended to wave–number 213 and the
number of levels increased to 31 (Simmons et al, 1991). The model used a computational grid with a resolution of about 60 km. In 1998 the horizontal resolution
was increased to wave number 319 linear truncation and in the following year the
number of levels increased to 50 with the highest at 0.1 hPa. Later in 1999 the vertical resolution in the PBL was increased, giving a total of 60 levels in the model.
In autumn 2000 the resolution was increased to T511.
The spectral technique was introduced operationally The global grid contains
8,300,760 points in all three dimensions. At each of these grid points, the meteorological variables are re–calculated every 20 minutes out to ten days ahead. The
total number of computations amounts to about 52 x 1012 and with the current Fuijitsu VPP 700 takes approximately 1 hour 35 minutes for the forecast.
Until 1995 the ECMWF model did not contain any explicit clouds, only
interpretations from other fields like relative humidity, precipitation, vertical
motion and vertical temperature gradients. A new cloud scheme was introduced in
April 1995 with clouds as prognostic parameters, defined through the cloud fraction and the content of cloud liquid water and cloud ice. Ozone was added as a predicted variable in 1999.
Up to 1996 the analysis system was based on optimum interpolation. That
year it was replaced by a three dimensional variational system (3DVAR), which
was upgraded to a four dimensional variational system (4DVAR) in 1997.
The wave model that is used for ocean wave forecasting at ECMWF is the
WAM model, developed during the 1980’s. The WAM model is the first model that
solves the complete energy balance equation, including the computationally expensive non linear interactions. A global version of the model became operational at
ECMWF in 1992, followed after a few months by a Mediterranean implementation. In June 1998 the wave model was integrated into the atmospheric model
allowing two–way interaction of wind and waves. At the same time ensemble prediction of ocean waves started. A big stimulus for developing the WAM model was
provided by the advent of remote sensing techniques for measurements of the
ocean surface by means of microwave instruments. Assimilation of altimeter data
was introduced in the global version of the wave model in August 1993.
3.1
13
1.The European Centre for Medium-Range Weather Forecasts - an historical
In 1992 the ECMWF started its Ensemble Prediction System. In autumn
1996 the number of members was extended from 32 to 50 members and the model
was upgraded from T63 to TL159, in autumn 2000 to TL255. The vertical resolution was increased from 31 to 40 levels in 1999. Crude allowance for the uncertainty of physical processes was made in autumn 1998 with the introduction of
stochastic physics.
From 1998 the first seasonal forecasts were issued on an experimental basis
Improvements in medium range forecasts
Since the ECMWF was established there has been an almost doubling of the
range of useful forecasts. Whereas the limits of useful deterministic forecasts for
the hemispheric surface wind and pressure is almost a week, it increases to one or
two days for in the troposphere, in the stratosphere beyond ten days.
Table 11: Summary of the development in large scale NWP, 1950-2000
Computer
performan
ce (MIPS)
Dynamic
skill (days)
Barotropic,
regional
0.01
1-2
Baroclinic,
quasigeostrophic,
1
Type of
Model
1950’s
1960’s
1970’s
hemispheric
(barotropic
developments)
1990’s
2000
14
Primitive
equations
Coupled
models,
EPS
Finite difference
4-5
50-100
> 500
5-6
(blockings and
cut-offs)
6-7 (up to
10 days in
the stratosphere)
Parametrizati
on
2-5 levels
Semiimplicit,
Finite difference
Spectral
methods
SemiLagrangian
100-150
km, 6-10
levels
50-100
km, 10-20
levels
15-50 km
30-50 levels
Model output
500
height
1 level
150-300
km,
(baroclinic
developments)
10
Resolution
300 km,
2-3
(large
scale flow)
1980
Numerical
technique
hPa
Simple
topography,
land/sea,
moisture
1000 & 500
hPa
height
and thickness
Convection,
cloud, radiation,
friction,
diffusion
Most atmospheric parameters, incl. 2m
T, 10m wind,
clouds, rain,
snow, showers
Real clouds
Fog
Ozone
Ocean waves
3.1
1.The European Centre for Medium-Range Weather Forecasts - an historical background
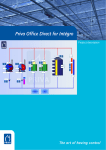
Verification of ECMWF forecasts
December 2000 − February 2001
100
Anomaly Correlation Coefficient (%)
90
80
70
60
10 hPa
100 hPa
200 hPa
500 hPa
1000 hPa
50
40
30
20
0
1
2
3
4
5
6
Forecast range (days)
7
8
9
10
Figure 1 : Anomaly Correlation Coefficient for ECMWF forecast for different levels over the Northern
Hemisphere winter 2000-2001.
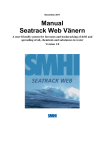
Even when the stratospheric flow occasionally undergo sudden transitions
the ECMWF forecasts this accurately ten days in advance.
10 hPa Z 2001-02-13 12h
0
-51
-46
3098
0
-40
3080
0
10 hPa Z 2001-02-20 12h
L
0
-49
3068
0
-40
3058
0
-36
3059
0
-56
3053
0
-49
-44
3029
0
0
-50
-52
-52
3117
0
-46
-51
-48
3121-47
0
3124
0
-44
3093
0
-45
3133
0
3129
0
3064
0
-62
-47
3028
0
3059
-50
3043
0
-52
3
0
3035
0 -54
3038
0
-67
3055
0
-49
3040
0
-66
-45
3049
0
-64
3106
0
L
3006
0
3066
0
-64
2964
0
-65
2970
0
-56
-42
3045
0
-40
3042
0
-37
3113
0
H
3133
0
-43
-45
-41
-35
-28
-48
-40
-31
3068
0
3057
0
-37
3066
0
30
0
3061
0
-26
-44
3061
0
3063
0
3070
0
3093
0
3099
0
-29 3089
0
2954
0
3026
0
3054
0
2957
0
-56
3037
3034
0
-57
3021
0
-40
3019
0
-56
3028
0
3032
0
3042
0
-53
L
-46
-45
2923
0
-47
0
-50
3067
0
0
-59
-44 3119
0
-51
3068
-52
0
3063
0
-55
55
H
3110
0
3104
0
-47
-54
3050
0
3011
0
3015
0
-26
-52
-50 3086
0
-51
-47
-47
3115
0
3043
0
3046
3076
0
-36
3066
0
L
3065
0
3076
0
3067
0
3061
0
Figure 2 : During a week in February 2001 a sudden “stratospheric warming” took place on the
Northern Hemisphere when the polar vortex was replaced by a anticyclonic flow with temperatures
increasing by 25-35 degrees.
3.1
15
1.The European Centre for Medium-Range Weather Forecasts - an historical
2001-02-01 12h fc t+240
2001-02-03 12h fc t+240
H
2001-02-05 12h fc t+240
H
L
H
L
L
H
2001-02-07 12h fc t+240
L
L
2001-02-09 12h fc t+240
2001-02-11 12h fc t+240
L
L
H
L
H
L
H
L
L
H
H
L
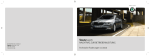
Figure 3 : D+10 ECMWF forecast at level 10 hPa from 1, 3, 5, 7, 9 and 11 February 2001 valid 11,
13, 15, 17, 19 and 21 February.
The late 1990’s has seen a slow, but steady improvement of the ECMWF
deterministic forecasts. Complemented with the Ensemble Prediction System there
are now resources available to the forecasters to issue useful forecasts well up to a
week in advance, with further indications of possible evolution up to ten days.
16
3.1
2.The ECMWF global atmospheric model
2. The ECMWF global atmospheric
model
The ECMWF general circulation model, TL511L60, consists of a dynamical
component, a physical component and a coupled ocean wave component.
2.1 The model formulation
The model formulation can be summarized by six basic physical equations,
the resolution in time and space and the way the numerical computations are carried out.
2.1.1 The model equations
Of the six equations governing the ECMWF primitive equation atmospheric
model, two are diagnostic and tell us about the static relation between different
parameters:
•
•
The GAS LAW gives the relation between pressure, density and temperature.
The HYDROSTATIC EQUATION shows the relationship between the density
of the air and the change of pressure with height.
The other four equations are prognostic and describe the changes with time
of the horizontal wind components, temperature and water vapour content of an air
parcel, and of the surface pressure.
•
•
•
•
3.1
The EQUATION OF CONTINUITY expresses the mass conservation and
determines the vertical velocity and change in the surface pressure.
The EQUATION OF MOTION describes how the momentum of an air parcel
changes due to the pressure gradient and the Coriolis force. Included are also
the effects of turbulent drag and gravity wave breaking
The THERMODYNAMIC EQUATION expresses how a change in an air parcel temperature is brought about by adiabatic cooling or warming due to vertical displacements. Other physical processes like condensation, evaporation,
turbulent transport and radiative effects are also included
The CONSERVATION EQUATION FOR MOISTURE assumes that the moisture content of an air parcel is constant, except for losses due to precipitation
and condensation or gains by evaporation from clouds and rain or from the
oceans and continents. Adding to this there are specific prognostic equations
for the cloud fraction, water, ice content and ozone.
17
2.The ECMWF global atmospheric model
Latent heat release, radiation from the sun and the earth’s surface and frictional or turbulent processes (diffusion) which are governed by the basic equations
are, due to their small scale, described in a statistical way as a parametrization
process (see 2.4).
2.1.2 The resolution in time and space
The present system uses a temporal resolution of 15 minutes. The computational time step has to be chosen with care in order to avoid numerical instabilities
and ensure enough accuracy. The vertical resolution (measured in geometric
height) is highest in the planetary boundary layer and lowest in the stratosphere
and lower mesosphere.
0.1
1
0.3
2
0.5
3
1
4
5
6
7
5
8
9
11
13
10
15
17
Level number
Pressure (hPa)
3
19
50
100
200
300
21
23
25
27
31
35
500
40
700
850
1000
50
60
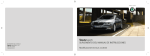
Figure 4 : To the left the vertical resolution before 1999 (31 level to 10 hPa), and to the right
after1999 (60 levels to 0.1 hPa)
18
3.1
2.The ECMWF global atmospheric model
The atmosphere is divided into 60 layers up to 0.1 hPa (about 64 km). These
so called σ−levels which follow the earth's surface in the lower and mid-troposphere are used as vertical coordinates but are surfaces of constant pressure in the
upper stratosphere and mesosphere. A smooth transition between these types of
levels is ensured (Untch et al, 1999)
For its horizontal resolution the ECMWF model uses two different numerical representations:
A spectral method, based on a spherical harmonic expansion, truncated at
total wave number 511, for the representation of upper air fields and the computation of the horizontal derivatives. Apart from the operational TL511L60 model
(511 spectral components and 60 levels), a TL255L40 is run for ensemble predictions (only up to 10 hPa), a TL159L40 for the 4DVAR assimilations and T63L31
for seasonal forecasts.
Table 12: Pressure of model levels when the surface pressure is 1015 hPa
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
(hPa)
0.1
0.3
0.5
0.8
1.2
1.6
2.1
2.7
3.4
4.2
5.2
6.4
8.0
9.8
12
15
19
23
29
36
(hPa)
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
44
55
67
80
96
113
133
154
177
202
229
257
288
320
353
388
425
462
500
538
(hPa)
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
577
616
654
691
728
763
797
828
857
884
908
930
949
965
979
989
998
1004
1009
1012
In addition there is a grid point representation used for computing dynamic
tendencies and the diabatic physical parametrization. This so–called Gaussian grid,
is regular in longitude and almost regular in latitude (Hortal and Simmons, 1991).
Due to the convergence of the longitudes toward the poles, the east–west distance
between the grid points decreases poleward. To avoid some numerical problems
around the poles, but most importantly to save computing time, a reduced Gaussian
3.1
19
2.The ECMWF global atmospheric model
grid was introduced in 1991 by reducing the number of grid points along the
shorter latitude lines near the poles, so as to keep the east–west separation between
points on different latitudes almost constant. With the current resolution the grid is
identical to a regular Gaussian grid between 24N and 24S.
The model surface is logically divided into sea and land points, by using a
land–sea mask. A grid point is defined as a land point if more than 50% of the
actual surface of the grid-box is land. With a TL511 resolution, islands like Corsica, Crete and Cyprus are represented by around five land grid points, Mallorca
and Gotland by only two. The Faeroe Islands, the Shetland Island and Rhodos are
not represented by any land point. The only minor inland lake which is represented
by sea points is Vanern in southern Sweden.
2.1.3 The numerical formulation
The choice of a semi-Lagrangian numerical scheme instead of an Eulerian is
the result of partly the need to save computer time and speed up the forecast. The
basic difference between an Eulerian and a Lagrangian formulation can be seen
from the equation (in a one-dimensional space):
∂Q
dQ
∂Q
+U
= 0
------- =
∂x
dt
∂t
which in an Eulerian way expresses that the local changes in Q are due to the
advection of Q by the wind U:
∂Q
∂Q
= –U
∂x
∂t
or in a Lagrangian way that Q is conserved for a given parcel:
dQ
------- = 0
dt
In a pure Lagrangian framework (following a set of marked fluid parcels)
shear and stretching deformations tend to concentrate parcels inhomogeneously, so
that it is difficult to maintain uniform resolution over the forecast region. A semi–
Lagrangian scheme is used to overcome this difficulty. In this version, the grid
points are stationary and at each time step the scheme computes a backward trajectory from every grid point. The point reached defines where the air parcel was at
the beginning of the time step. The interpolated value of the variable in that point is
then carried forward to the grid point, applying the various physical processes.
20
3.1
2.The ECMWF global atmospheric model
Whereas all Eulerian schemes require small time steps to avoid numerical
instability, (the quantity Q must not be advected by more than one grid length per
time step), the semi-Lagrangian scheme allows longer time steps. The limitation
for stability is that the trajectories do not cross (a parcel can not "overtake" another
one). In the present two–time–level scheme the movement of the parcels is
assumed of constant acceleration, not straight lines. Tests have shown that a semi–
Lagrangian timestep can be at least fifteen times longer than the Eulerian without
becoming unstable.
2.2 Parametrization of physical processes
The primary function of the forecast weather parameters in the ECMWF
model, lies in their impact on the overall atmospheric flow. A ten–day integration
makes it absolutely necessary to include effects with relatively long time scale,
even as subtle as the evaporation by vegetation, in order to handle the flow pattern
more accurately. The different time scales and feed–back mechanisms between the
various processes makes the computations extremely complex and expensive.
These processes are mainly related to small scale disturbances in space and
time, smaller than the scales explicitly resolved by the model, from convective
clouds down to molecular processes. The effect that these subgrid scale processes
have on the larger scales can be computed only by parametrization, i.e. formulating
indirectly their overall effect in terms of known grid scale variables.
2.2.1 The model orography
The representation of the orography uses the mean orography and four additional fields describing the standard deviation, orientation, anisotropy and slope of
the sub–grid orography. This takes some account of the orographic variability, but
does not change the fact that for the usefulness of the weather parameters, the
model orography is still significantly smoother than reality (see 5.7.3).
However, the parametrization allows a realistic representation of the mountain drag, which is important for the creation of large scale atmospheric eddies. A
novel and important part of the scheme is that, depending on dynamical criteria, it
can block the low level flow rather than make the air go over the orography.
3.1
21
2.The ECMWF global atmospheric model
ECMWF topography N Europe
132
97
64
136
51
Figure 5 : The model height (in dekameters) for northern Europe
ECMWF topography SW Europe
95
71
52
227
63
209
125
165
54
61
104
137
59
55
128
65
121
75
115
128
Figure 6 : The model height (in dekameters) for southwestern Europe
22
3.1
2.The ECMWF global atmospheric model
ECMWF topography SE Europe
71
95
52
(
"
113
227
#
209
!
261
63
61
'
130
#
104
(
56
"
225
"
&
127
141 85
$
113
65
73
182
78
&
%
178
148
&
147
58
65
#
104
Figure 7 : The model height (in dekameters) for southeastern Europe
2.2.2 The Planetary Boundary Layer
The treatment of the Planetary Boundary Layer (PBL), plays a fundamental role for the whole atmosphere–earth system. It is through the surface exchanges
of momentum, heat and moisture that the atmosphere "feels" that it moves over a
rough land surface or a wet smooth sea (Beljaars and Viterbo, 1993).
The lowest 13 levels are at around 10, 30, 60, 100, 160, 240, 340, 460, 600,
760, 950, 1170 and 1400 m above the model surface. Even with this fairly high resolution the vertical gradients of temperature, wind, moisture etc. in the PBL cannot
be described very accurately, let alone the turbulent transports of momentum, heat
and moisture. For the estimation of these parameters the model uses the larger
scale variables such as wind, temperature and specific humidity, with the assumption that the transports are proportional to the vertical gradients.
At the earth’s surface, the turbulent transports of momentum, heat and moisture are computed as a function of air–surface differences and surface characteristics. Over land areas, snow depth, soil temperature and wetness are forecast
variables, calculated by a model of the soil with four layers with respective depths
of 7, 21, 72 and 189 cm.
3.1
23
2.The ECMWF global atmospheric model
The sea surface temperature (SST) is based on analyses received daily
from NCEP, Washington. It is based on ship, buoy and satellite observations. In
small waters like the Baltic Sea where rapid changes in SST can take place during
the cold season, the real SST can sometimes differ by as much as 5˚ from the analysis.
The sea–ice fraction is based on satellite observations. The temperature at
the surface of the ice is variable, according to a simple energy balance/heat budget
scheme. The SST over ice–free water and the distribution of sea and sea–ice points
is kept constant during the forecast; no freezing of the water or melting of the ice is
allowed.
For the albedo a background monthly climate field is used over land. Over
sea-ice the albedo is set to 0.7 and 0.5 for the two spectral bands. Open water has
an albedo of 0.06 for diffuse radiation and a functional dependence of solar radiation for direct radiation. Over land the forecast albedo depends on the background
albedo and the snow depth. It has a minimum of 0.07 and can go up to 0.80 for
exposed snow and 0.20 for snow in forest.
The thermal properties of snow covered ground depend only on the snow
mass per unit area. The snow depth evolves through the combined effect of snowfall, evaporation and melting (Beljaars and Viterbo, 1996). As the snow ages, the
albedo decreases and the density increases.
The soil moisture is divided into skin and soil reservoirs. The skin reservoir
(which mainly is moisture on vegetation) evolves under the action of its own evaporation and its ability to collect dew and intercept precipitation. The soil reservoir
takes into account precipitation and snow melt, as well as vertical transfer of water
due to drainage and capillarity, evaporation over bare ground and root uptake by
vegetation.
The vegetation ratio is separated into low and high vegetation fractions and
the corresponding dominant types of vegetation are specified in each grid point and
used by the model to estimate the evaporation.
The orographic drag scheme represents the momentum transport due to
sub–grid gravity waves and the blocking effect of orography in relatively stable
conditions. When stably stratified air flow crosses a mountain ridge, gravity waves
are excited into the flow. Depending on the static stability and vertical wind shear,
these gravity waves can propagate vertically until they have sufficiently large
amplitude to break. The scheme has a certain impact on the large scale flow; it
24
3.1
2.The ECMWF global atmospheric model
makes it slightly less zonal and contributes to the formation of blocking highs and
cut–off lows.
2.2.3 Radiation
In view of the importance of cloud–radiation interaction in both long and
short term processes, ECMWF has placed high emphasis on the treatment of the
absorption and scattering by clouds of solar and terrestrial radiation. About 15 percent of the overall computational time is devoted to the radiation scheme.
The radiation spectrum is divided into eight frequency bands: two in the
short wave spectrum (direct from the sun and diffuse radiation), and 15 in the long
wave spectrum (from the earth and within the atmosphere). The upward and downward diffused radiation is computed for each of the 16 spectral bands. The parameters influencing the emission and absorption are pressure, temperature, moisture,
cloud cover and cloud water content, and carbon dioxide, ozone, methane, nitrous
oxide, CFC–11 and CFC–12. Assumed parameters are the solar constant, the concentration of CO2, O3, and other trace gases, the distribution and optical properties
of aerosols and ground albedo, this last one modified according to the snow cover.
The radiation scheme is designed to take the cloud–radiation interactions
into account in considerable detail. It allows partial cloud cover in any layer of the
model. For cloudy grid points, computations are made both for clear and overcast
conditions, and the total amount weighted together according to the forecast cloud
amount. Provision is made to have the radiative effects of various types of aerosols
(oceanic, continental, desert, urban, and stratospheric background) taken into
account. The carbon dioxide has a constant mass mixing ratio over the whole globe
corresponding to a volume concentration of 353 ppmv.
2.2.4 Clouds
The main purpose of the cloud scheme is to provide input to the radiation
computations and to calculate precipitation. The clouds are generated by large–
scale ascent, cumulus convection, boundary layer turbulence and radiative cooling.
They are dissipated through evaporation due to large–scale descent, cumulus–
induced subsidence, radiative heating and turbulence at both cloud tops and sides,
as through precipitation processes.
The cloud scheme is unique in treating the main cloud–related processes in a
consistent way by forecasting both cloud fraction and cloud water/ice content with
3.1
25
2.The ECMWF global atmospheric model
their own prognostic equations. In the scheme the cloud processes are strongly
coupled to other parametrized processes.
Convective clouds are computed in parallel with the convective scheme
which in the model fulfils five objectives:
•
•
•
•
•
compute the cloud amount and cloud water/ice to be passed on to the cloud
scheme,
compute the convective precipitation,
compute the vertical transport of moisture,
compute the vertical momentum fluxes,
compute temperature changes in the atmosphere due to release of latent heat or
cooling in connection with evaporation.
Sub–grid vertical fluxes of mass, heat, water vapour and momentum are
computed at each model level with the help of a simple mass flux model interacting
with its environment. The scheme is applied to penetrative convection, shallow
convection and mid–level convection. They are mutually exclusive, so only when
the scheme fails to create cloud of one type, does it try the next.
Deep convection predominantly occurs in disturbed situations with a deep
layer of conditional instability and large–scale moisture convergence. The downdraught mass flux is assumed proportional to the updraught mass flux.
Shallow convection predominantly occurs in undisturbed flow, in the
absence of large scale convergent flow. The moisture supply is from surface evaporation. It does not normally produce precipitation.
Mid–level convection describes convective cells which originate at levels
above the boundary layer, like Altocumulus castellanus floccus. Less clearly visible, but frequent, are rain bands connected to extratropical cyclones.
Stratocumulus clouds are linked to the boundary layer moisture flux produced by the vertical diffusion scheme.
Stratiform clouds (e.g. low level stratus and medium level nimbostratus
types) are determined by the rate at which the saturation specific humidity
decreases due to upward vertical motion and radiative cooling.
Evaporation processes in connection with clouds are accounted for in several ways: large–scale and cumulus–induced subsidence and radiative heating,
26
3.1
2.The ECMWF global atmospheric model
evaporation at the cloud sides due to turbulent processes and turbulent motion at
the cloud tops.
2.2.5 The hydrological cycle
Precipitation processes do not only take into account the local water/ice content, but also different precipitation enhancement processes. The effect of evaporation of falling precipitation is also included. Two mechanisms to generate
precipitation are included in the ECMWF model, for convective and for stratiform
(frontal or dynamical) precipitation:
Convective precipitation: the condensate formed in the updrafts of the convection parametrization is water above 0˚C, ice below –23˚C and a mixture of the
two in between. If the amount of condensate formed exceeds the value that can be
sustained by the vertical velocity, precipitation is formed in the form of snow or
water.
Stratiform precipitation: cloud water and ice from the cloud scheme are
converted into precipitation dependent on the water/ice content. Precipitation
enhancement processes, such as collection of cloud water by precipitation and the
Bergeron process are also taken into account.
Acc. rain 1997-07-05--09 00utc+24h
+
81
)
275
*
100
,
73
Figure 8 : Accumulated rainfall during the first 96 hours of the T213 operational forecast 5 July 1997
12 UTC. The floodings in eastern Europe summer 1997 were well forecast by the ECMWF model.
However, the maximum rainfall of 400 mm in southeastern Poland was slightly underestimated.
3.1
27
2.The ECMWF global atmospheric model
Acc. rainfall 1997-07-05 12h fc t+96 T639
/
91
3
/
75
113
.
130
-
.
83
1
88
473
3
0
0
101
75
109
2
76
Figure 9 : Accumulated rainfall during the first 96 hours of a T639 experimental model forecast 5
July 1997 12 UTC. With a higher resolution model the correct level of intensity is achieved, and the
orographic effects more realistically treated.
Evaporation: it is assumed that falling precipitation evaporates in non–saturated layers before reaching the ground. This may substantially reduce the surface
precipitation. Evaporation of the precipitation is not assumed to take place within
the cloud, but only in cloud free air besides or below the model clouds.
Melting: melting of falling snow occurs in a thin layer of a few hundreds of
metres below the freezing level. It is assumed that snow can melt in each layer
whenever the temperature exceeds 0˚C. The melting is limited not only by the
snow amount, but also by keeping the induced cooling of the layer such that the
temperature of the layer after melting is not below 0˚C.
2.3 The ocean wave forecast
The wave model that is used for ocean wave forecasting at ECMWF is the
WAM model (WAMDIG, 1988, Komen et al, 1994). It describes the rate of change
of the wave spectrum due to advection, wind input, dissipation due to white capping and non linear wave–wave interactions. The wave spectrum gives the distribution of wave energy over frequency and direction and gives a complete
specification of the sea state. The WAM model is the first model that solves the
complete energy balance equation, including the computationally expensive non
linear interactions.
28
3.1
2.The ECMWF global atmospheric model
Table 13: Wave forecast products
2D-spectra:
Peak period of 1D-spectra
2D-spectra for total sea, wind:
Significant wave height, Mean wave direction, mean wave period
Global model:
0.5˚ x 0.5˚ latitude/longitude T+0 to T+240 every 6 hours
Baltic and Mediterranean model:
0.25˚ x 0.25˚ latitude/longitude T+0 to T+120 every 6 hours
In June 1998 the wave model was integrated into the atmospheric model
allowing two–way interaction of wind and waves. At the same time ensemble prediction of ocean waves started. Assimilation of altimeter data was introduced in the
global version of the wave model in August 1993. Buoy data are not assimilated,
instead, they serve as an independent check of the quality of modelled wave height
(Janssen, 1997; Janssen et al, 1997).
Two versions of the WAM model are running at ECMWF: the global model
has an irregular latitude longitude grid with a resolution of 55 km. The advection
time step is 20 minutes, the same as for the source term integration. The wave
spectrum has 30 frequency bins and 24 directions; the limited area model covers
the North Atlantic, Norwegian Sea, North Sea, Baltic Sea, Mediterranean and the
Black Sea. It has a resolution of 28 km, shallow water effects are included and the
advection and source time step are 10 minutes. The wave spectrum has 30 frequency bins and 24 directions (Janssen, 1998).
The wave forecast is to a considerable extent determined by the quality of the
surface wind forecast. This implies that there may be underestimation of the wave
forecast near the coasts and in enclosed basins such as the Baltic and the Mediterranean. Furthermore, in rapidly varying circumstances such as occur near fronts or
at the peak of the storms the resolution of the atmospheric and wave model may
limit a realistic representation of the sea state.
Finally, there may also a number of problems with the wave model itself. For
example, the propagation of swell is handled by a simple first-order upwinding
3.1
29
2.The ECMWF global atmospheric model
scheme which may give rise to a smoothing of the wave field. Errors due to this
are, however, fairly small as they are on average of the order of 10-20 cm in the
significant wave height.
Nevertheless, it should be remarked that since the introduction of the TL511
model, verification of significant wave height and peak period against Northern
Hemisphere buoy data has shown an outstanding performance of wave analysis
and forecast, in particular near the coast and during extreme events.
Coupled to the ensemble prediction system (see ch.4) fifty wave forecasts are
generated from the fifty ensemble forecasts. From this a wide range of information
can be derived, for example the probability of significant wave heights of more
than 4 metres.
99
1020
N
LM
20
10
>?
Y
0
101
102
JK
0
89
0
101
5
10
10
10
1020
@A
10
:;
0
\ SURFACE: mean sea level pressure
1010
\ Sunday 23 January 2000 12UTC ECMWF Ensemble Control FC t+ 72 VT: Wednesday 26 January 2000 12UTC
BC
0
102
1030
OP
30
10
Z[
0
03
1
30
WX
10
<=
DE
10
10
0
102
1020
QR
UV
30
10
30
10
4
94
HI
20
10
67
10
FG
10
20
10
ST
30
10
1020
Figure 10 : Probabilities of wave heights exceeding four metres on 26 January 2000 12 UTC
according to the wave ensemble forecast three days earlier.
2.4 The seasonal forecast system
Seasonal forecasting is the attempt to predict the probability distribution for
weather several months or more into the future. The emphasis is on averages over a
month or season, and how the probability distribution differs from "climatology".
Seasonal forecasting is possible, because although the details of individual weather
systems are not predictable on these time scales, the statistics of them are deter-
30
3.1
2.The ECMWF global atmospheric model
mined by various factors, some of which can be predicted. The most important factor is sea surface temperature, especially in the tropics. Other factors include soil
moisture and snow cover.
In many parts of the tropics, where changes such as those associated with El
Nino can have a large impact on global weather patterns, a substantial part of the
year–to–year variation in seasonal mean rainfall and temperature is predictable. In
mid–latitudes, the level of predictability is lower, and Europe in particular is a difficult area to predict. It is essential to understand that the forecasts are necessarily
probabilistic, and that the range of possible values predicted may often differ from
climatology by only a modest amount.
A basic seasonal forecasting system has been running at ECMWF since early
1997, and a limited set of forecast products has been supplied since December
1997. A comprehensive "Seasonal Forecast User Guide" is available from the
ECWMF web pages. Information on the system presently running can also be
found there, together with some assessments of the skill of the seasonal forecasts.
Initial applications of seasonal forecasting are expected in energy, agriculture,
insurance, health and emergency relief; many of these applications will be most
valuable beyond the geographical borders of Europe.
Using numerical models of the ocean and atmosphere to calculate seasonal
forecasts is a challenging problem, and although a useful level of skill now exists, a
mature seasonal forecasting capability will take many years to develop. Note that
while an operational schedule may be maintained, the science of seasonal forecasting is still under development. From a scientific perspective our systems are still
experimental.
The value of seasonal forecasting is expected to increase in the coming years,
both because of improvements in the forecast skill and from better use being made
of the information that the forecasts contain.
3.1
31
2.The ECMWF global atmospheric model
32
3.1
3.The data assimilation and analysis system
3. The data assimilation and analysis
system
3.1 Introduction
In the early years of NWP initial conditions for the simulations were
obtained from manually analysed meteorological charts, laboriously interpolated
to pre–defined grid points. It was not until the mid 50’s that the current concept of
fitting a prognostic first–guess field to observations was suggested and successfully
tried.
During the 80’s the increasing availability of asynoptic data, in particular
over the oceans, stimulated the research into more advanced analysis procedures
like the "four–dimensional variational data assimilation" where the concept of a
continuous feedback between observations and model was put on a mathematical
foundation in the so–called Kalman filter (Bouttier and Courtier, 1998). This technique has become even more important due to the last decades’ gradual reduction
of the radio sounding network and increase in satellite data.
3.2 The ECMWF analysis cycle
At ECMWF global analyses are made in two twelve hour intervals a day,
centred around the main analysis times, 00 and 12 UTC. The analysis is performed
by comparing the observations directly with a very short (3 to 15 hour) forecast
using exactly the same model as the operational medium-range forecast. The differences between the observed values and the equivalent values predicted by the
short–range forecast are used to make a correction to the first–guess field in order
to produce the atmospheric analysis (Courtier et al, 1998). For remotely sensed
radiances (currently ATOVS and SSM/I) the comparison involves complex radiative calculations (Andersson et al., 1998). The upper-air analysis is then combined
with the surface analyses of snow, ice, SST, soil wetness and ocean waves, in order
to produce the initial state for the next short-range forecast.
3.3 Data availability
As a forecasting centre with the emphasis on the medium–range, ECMWF
operates with long data collection times, varying between 15 hours for the 00 UTC
analysis and 8 hours for the 12 UTC final analysis. A preliminary 3DVAR analysis
is made of the 00 UTC analysis cycle, based on slightly reduced data (shorter cut–
3.1
33
3.The data assimilation and analysis system
off time) to allow an early forecast to be run to provide boundary conditions for
limited area models.
Real–time operational constraints mean that the data can only be used if it is
received in time for each analysis. Approximate cut–off times at the beginning of
year 2000 are given below for each of the three daily operational analyses.
Table 14: Cut-off times for different analysis cycles
00 UTC
Nominal
analysis time
short cut-off
Earliest data time
00 UTC
12 UTC
21:00 UTC
15:00 UTC
03:00 UTC
Latest data time
03:00 UTC
03:00 UTC
15:00 UTC
Cut-off time
03:05 UTC
16:20 UTC
19:50 UTC
This schedule ensures the most comprehensive global data coverage, including the Southern Hemisphere surface data and global satellite sounding data.
3.4 Data pre-selection
A very large amount of observed data is available for use by the assimilation
and forecast system. In a particular 12–hour period there is a total of more than 500
000 pieces of data that are used. All the available data is considered for use in the
analysis. Exceptions are satellite observations or locally dense data like aircraft
reports where some thinning is applied. Some data are monitored for future use,
others may appear in several different forms and some are redundant. Below are
shown the average percentage of used observations:
•
•
•
•
> 90% Pressure from SYNOP and SHIP, humidity from SHIP
70–90% Pressure from DRIBU, temperature from TEMP, wind from DRIBU, PILOT and
TEMP.
50–70% Humidity from land SYNOP and TEMP, pressure from PAOB (bogus pressure observations from Melbourne), winds from SHIP and AIREP, temperatures from AIREP.
< 15% satellite observations from ATOVS (radiances), SCAT (scatteometer winds), SSM/I
(humidity observations) and SATOB (cloud wind observations)
For some data types, there is a transformation of the received data into physical variables that are better suited to the analysis procedure. This is the case for
SCAT (the numbers given are for ambiguous wind vectors) and for SSM/I (the
numbers given are for retrieved total column water vapour). Also, humidity observations (originally relative or specific humidity, or dew–point temperature) are
transformed using the reported temperature. Other data types are used to analyse
snow, ice, SST (sea surface temperature), soil wetness and ocean waves.
34
3.1
3.The data assimilation and analysis system
The various data types have very different characteristics in terms of geographical coverage, vertical structure, temporal distribution and ability to correct
the model state. Whereas in situ observations tend to be more informative than
remotely–sensed observations, the latter have a better coverage. Many conventional observing stations report at 12–, 6– or 3–hourly intervals, but some report
every hour. Aircraft, buoy and (orbiting) satellite data production tends to be continuous in time (Kelly, 1997; Järvinen et al, 1999).
3.5 Quality control of observations
An intricate quality control procedure is applied in order to ensure that only
good quality data are used in the analysis. The data is permanently blacklisted if
* it cannot be compared reliably to the model state, usually because the
model is not realistic enough, or not enough is known about the physical nature of
the data. This is true for example with SCAT observations over land, or SYNOPs
for which the model orography is very far from the actual station height.
* its quality has not yet been properly assessed. All experimental data is
carefully monitored before it is allowed into the system.
* it could not be decoded satisfactorily, for instance because it does not follow WMO conventions.
A particular form of blacklisting is the thinning produce applied to a station,
platform or satellite reporting too densely in time or space. This is the case for all
satellite data and some AIREPs. Multiple reports from the same (geographically
fixed) station are used at up to one–hour frequency. All reported radiosonde levels
are used.
The data is temporarily blacklisted if
* the monitoring has found problems in the data. The blacklist is updated
manually once a month; it involves the comparison of the data with model fields,
neighbouring observations and other data types.
Data which is not blacklisted can still be rejected by the quality control if
* it is not realistic according to basic tests that follow WMO recommendations: hydrostatic check of TEMP data, check of the displacement of ships and
drifting buoys, ship data over land, very large deviations from climatology, duplicate report, etc.
* it is very different from the background fields of the model (i.e. the previous short–range forecast). This test is more stringent for areas and parameters that
are believed to be more accurately forecast (Järvinen and Undén, 1997). It can be
3.1
35
3.The data assimilation and analysis system
combined with the thinning procedure to ensure that the best data is not thinned
out.
* it disagrees significantly with its neighbours. This test is done within the
variational data assimilation procedure (Andersson and Järvinen, 1999).
All quality control decisions are recorded for diagnostic purposes. The final
decision to use or to reject the data can involve more than one of the above steps.
3.6 The 4DVAR analysis procedure
x
]a`
obs
analysis
]a`
obs
corrected
forecast
]a`
xb
]_^
xa
obs
]a`
b previous
forecast
obs
3z
6z
d
c
9z
12z
15z
time
assimilation window
Figure 11 : A schematic illustration of the 4DVAR analysis
With the four-dimensional variational analysis (4DVAR) system introduced
in November 1997 the influence of an observation in space and time is controlled
by the model dynamics which increases its realism of the spreading out of the
information (Bouttier and Rabier, 1998, Saunders et al, 1998, Rabier et al, 2000,
Klinker et al, 2000, Mahfouf et al, 2000). This is achieved by having the background errors modified by the model dynamics over the assimilation period in a
flow dependent way. Observations are thereby given larger weights near rapidly
moving or deepening cyclones where the forecast uncertainty is larger.
36
3.1
3.The data assimilation and analysis system
The atmospheric analysis procedure is a four–dimensional variational data
assimilation over a time window from 9 hours before to 3 hours after the nominal
analysis time. The correction to the first–guess fields are made with a T159L60
model. The algorithm is designed to find a compromise between the previous forecast at the beginning of the time window, the observations, and the model evolution
inside the time window.
The result can either be seen as a sequence of analyses, or one short–range
T511L60 forecast, that spans the 12–hour time window. For instance, the 12:00
atmospheric analysis is actually an optimal forecast at 9–hour range, which was
started at 3:00 using observations between 3:00 and 15:00. Theoretical studies
indicate that the most realistic model state is obtained near the middle of the time
window.
3.7 Structure functions
In 4DVAR the compromise between the information in the background and
in the observations is determined by the combination of the model dynamics with
weights given to the background (or first–guess) field and to the observations.
These weights are based on a priori estimates that describe the errors one expects
to find in the background fields (Derber and Bouttier, 1999) and in the observed
values.
A correction of one model variable will generate corrections of other variables whenever this is consistent with the dynamics. For instance, a sequence of
observation of humidity that show a displacement of atmospheric structures, will
entail a correction not only of the moisture but also of the wind field that is consistent with the advection of these structures.
The relative weight given to the observations and to the background depends
on the local predictability of the flow: an observation inside a baroclinically unstable jet or a growing storm will be fitted more than the same observation in an anticyclone, for instance. This makes 4DVAR able to correct the phase, the tilt and the
deepening rate of developing storms (Rabier et al 1997) - but it may also make
4DVAR sensitive to erroneous observations, individual or in a group, which have
not been detected by the quality control.
3.1
37
3.The data assimilation and analysis system
3.8 No analysis is perfect
There are different reasons why errors in the initial conditions (the analysis),
can negatively affect the forecast:
•
•
•
•
•
No data over considerable times and areas. This can be the case when cyclonic
developments have their origin in the arctic and, in particular, in subtropical
areas where the presence of warm and moist air make errors have larger than
normal consequences.
Bad data have been accepted. This is often the case when the First Guess (FG)
is bad and agrees with erroneous data, or when lack of surrounding data makes
any internal check impossible.
Good but unrepresentative data have been accepted. Isolated observations
reflecting extreme or small scale weather conditions are interpreted as related
to more large scale dynamical systems.
Good data have been rejected. Either the FG is so wrong that the observations
have not been accepted by the system, or other erroneous observations in the
neighbourhood have gained more weight.
Good data has influenced the analysis in a wrong way. A combination of
mainly correct observations can yield bad forecasts because the way the structure functions spread out the information. This can happen for example when a
weather system is covered only partially by observations.
An analysis error does not necessarily lead to any forecast failure (except in
the immediate environment). To have a more wide spread impact it must occur in a
dynamically sensitive region, in particular where young baroclinic systems
develop. During a cyclogenesis huge amounts of kinetic energy feed into the upper
mid–latitude westerlies, in particular the jet streams, which will transport the
energy out of the area. In a short time the conditions downstream will be affected.
If a new cyclone is developing there, it might start to develop erroneously. In a few
days time the errors from this system will spread from one system to the next in a
process, reminiscent of a "domino effect”.
3.9 Monitoring of the data assimilation system
The ECMWF puts great emphasize on monitoring the quality of the observational network. It is done through statistical monitoring of all platforms to establish
any systematic biases or erratic variations, through daily inspections of the analysis
material and case studies of bad or very inconsistent forecasts.
38
3.1
3.The data assimilation and analysis system
The investigation of a bad forecast is made in three steps to answer when did
the error enter into the analysis, where did it happen and what caused the error?
To trace the geographical origin of the error, different methods, empirical as
well as objective, have been developed: forecast error maps, sensitivity analyses
and the EPS perturbations. The speed of this transport is roughly determined by the
upper tropospheric flow. For a velocity of 30 m/s this corresponds to 30˚/day at 45˚
latitude, which agrees well with the theoretical calculations of the "group velocity"
of dispersive Rossby waves. On an error map this appears as an initial error which
will move slowly downstream while it generates a wave train with increasing longitudinal extension.
ERROR 500hPa Z 1991-04-04 12h fc t+24
L
e
ERROR 500hPa Z 1991-04-04 12h fc t+48
e
L
-3.2
4.2 -3.0
L
e
ERROR 500hPa Z 1991-04-04 12h fc t+72
L
e
e
L
L
e
ERROR 500hPa Z 1991-04-04 12h fc t+120
7.7
e
L
H
f
L
e
h
-10.4
L
e
L
e
-17.3
i
-3.6
7.0
L
e
i
-17.3
g Le
-23.4
f
H
i
27.3
ERROR 500hPa Z 1991-04-04 12h fc t+144
9.0
j
35.7
L
e
ERROR 500hPa Z 1991-04-04 12h fc t+96
-8.6
g
-10.1
h 13.4
4.9
f
H
L
e
5.7
1.7
-4.2
7.0
-6.7
3.6
f
H
e
L
L
e
-9.9
L
e
h
40.8
-2.9
21.4
e
L
f
H
i
-27.1
L
e
f
H
Figure 12 : The forecast 500 hPa flow (thin lines) and errors (thick dashed lines positive, thick full
lines negative errors) from 4 April 1991. A TEMP SHIP on the northwest Pacific, west of Vancouver
had been wrongly decoded and caused a 20–30 gpm positive analysis error (+4.2 dgpm at +12h).
Early in the forecast a new negative error (-3.0 dgpm) is created downstream over W USA. While it
moves eastward under amplification (amplifying from -6.7 to -18.1 dgpm) another error of opposite
sign (amplifying from +13.4 to+27.8 and +35.7 dgpm) is followed by a fourth error (amplifying from 17.3 to -23.4 and -27.1 dgpm) which was associated with a spurious cut-off over NW Europe.
3.1
39
3.The data assimilation and analysis system
The fast speed of the influence means that a three day forecast for Europe is
dependent to a large extent on the initial conditions over the whole N Atlantic, a
five day forecast on the initial conditions over North America, and a seven day
forecast on the initial conditions over the North Pacific. In summertime the spread
of influence is slightly slower.
Forecast
m error propagation into
m Europe
150 W
180
O
O
150 E
O
O
20
N
D-7
120 W
O
D-7
D-5
D-5
O
120 E
90 E
90 W
O
O
D-3
D-3
m
80 N
O
m
60 E
m
O
60 N
m
60 W
O
D+0
O
O
20
kl
N
O
40 N
m
30 W
O
0
m
O
m
30 E
O
Figure 13 : The areas in the NH where analysis errors D–N days back in time will have most effect
on the forecasts over Europe at D+0. During winter the zonal flow is stronger and passes over the
dense network over the US. At summertime when the US is covered by a subtropical ridge, the main
flow is slower and passes over Alaska, Canada and Greenland with their coarse network of
observing stations.
In the Southern Hemisphere the typical group velocity is 40˚/day due to the
predominant zonal flow and low frequency of blocked patterns. (Persson, 2000)
Finally, the search for the actual observation or observations that caused the
error is not trivial. As mentioned above, even correct observations can give rise to
40
3.1
3.The data assimilation and analysis system
analysis error if the analysis spreads out their influence in an erroneous way. Rerunning the analysis and forecast with the suspected observations left out is one
way to establish the cause of the failure. But this method is not 100% conclusive
since a change in one or a few observations might change the assimilation of other
neighbouring platforms.
3.10 Future developments of the data assimilation system
A main future directions for the evolution of the analysis are to resolve
smaller–scale structures by using more data (particularly from satellites) and by
increasing the model resolution, to make the analysis more consistent with the
model dynamics and the water cycle (clouds and precipitation), and to assimilate
new variables such as ozone.
The sensitivity of the analysis to the dynamics has recently been improved by
an algorithm called the Reduced Rank Kalman Filter (RRKF), which will mean
that the recent history of the atmospheric flow will be taken into account, even at
the time of the background field (Fisher, 1998).
3.1
41
3.The data assimilation and analysis system
42
3.1
4The Ensemble Prediction System (EPS)
4 The Ensemble Prediction System
(EPS)
4.1 Introduction
Twenty-thirty years ago the introduction of primitive equation models, the
rapid advance in computer technology, remote sensing from satellites and an ever
increased sophistication of numerical methods fostered a sense of great optimism.
But progress in predictive skill remained slow and gradually the question arose if
there was an ultimate limit to atmospheric predictability.
The interest came to focus on a strange result, first reported at a NWP meeting in Tokyo in 1960 by Edward Lorenz at the MIT. He had investigated if calculations based on non–linear differential equations could be replaced by statistical
methods. The answer was “no”, but during one of his computational simulations he
noticed how very small differences in the initial conditions could affect his
extremely sensitive non–linear differential equations. It looked as if the old saying
that “a sneeze in China may set people to shovelling snow in New York" indeed
was true (Lorenz, 1993, p.15,130ff).
The consequences for NWP was that the limitations in the observational network and measurement accuracy would impose an upper limit in weather forecast
quality. However, it was realized that in spite of this, the value of the NWP would
be highly enhanced if the quality of the forecasts could be assessed a priori. The
idea of including a stochastic element in NWP was born, but it had to wait until the
late 1980’s until sufficient computer power made experiments possible.
4.2 The spread of forecast errors
As mentioned earlier, for an analysis error to have a more wide spread impact
it must occur in a dynamically sensitive region, in particular where young baroclinic systems develop. The errors from this weather system will in a few days time
spread to the next, in a process reminiscent of a "domino effect”.
The 2-4 day forecasts for the European area are therefore sensitive to the
analysis over W Atlantic and eastern North America. The intensity and positio of
the cut-offs frequently forming in the eastern Atlantic, is highly influenced by the
presence of a strong cyclogenesis over the Mexican Gulf and southern USA. Any
error in the forecast of this upstream feature will be crucial for the success of the
downstream cut-off.
3.1
43
4The Ensemble Prediction System (EPS)
500hPa and 1000 hPa geop 1993-03-13 12z
LOW
o
LOW
no
L
LOW
o
500hPa and 1000 hPa geop 1993-03-14 12z
LOW
o
no
L
LOW
o
LOW
n
L
p
H
500hPa and 1000 hPa geop 1993-03-15 12z
o
LOW
p
H
o
LOW
H
p
o Ln
LOW
Figure 14 : The ECMWF analyses of the 500 and 1000 hPa flow during the March 1993 American
“Super Storm” show how the deepening of the strong upper trough over S USA in connection with
the intensification of the surface low (thin lines only for every 4 dgpm 1000 geop. below 0), was
followed by a cut-off some days later west of Portugal. Note that the origin of the trough that “cut off”
was a weak trough southeast of Newfoundland.
44
3.1
4The Ensemble Prediction System (EPS)
The 5–7 day forecasts for the European area are sensitive to the initial conditions over the central and western part of North America, and the eastern part of
the Pacific. Forecasts beyond a week are influenced by the initial conditions over
central and western parts of the Pacific, and at day 10 from eastern Asia.
1993-01-24 12z+72h vt:1993-01-27 12z
1993-01-25 12z+48h vt:1993-01-27 12z
r
r
L
L
q
q
r
H
H
L
q
H
1993-01-24 12z+96h vt:1993-01-28 12z
1993-01-25 12z+72h vt:1993-01-28 12z
r
r
L
L
q
H
1993-01-24 12z+120h vt:1993-01-29 12z
q
1993-01-25 12z+96h vt:1993-01-29 12z
r
H
r
L
L
q
H
Figure 15 : A similar chain of developments as in the previous figure occurred some time earlier on
27-29 January 1993. This was well forecast by the run from 25 January (right column), whereas the
forecast from the day before (left column) missed the formation of the cut-off. The decisive analysis
differences were not associated with the trough which ultimately “cut off”, but with a upstream trough
and baroclinic development over southeastern USA and northern Mexico. This system was forecast
to pass over Florida on the 27 January (upper row) and was weaker in the earlier forecast than in the
later. The stronger development caused the downstream ridge to amplify which in turn affected the
trough moving eastward over the Atlantic.
Since the initial state of the atmosphere is known with a limited accuracy,
even small analysis errors in sensitive parts of the atmosphere may affect the very
large scale flow during the course of the ten day forecast period (Palmer, 2000).
Another, equally accurate analysis with a slightly different geographical distribution of the initial errors, might yield a different forecast. The deterministic forecast
is just one possible development of a number of alternatives, not necessarily the
most likely.
3.1
45
4The Ensemble Prediction System (EPS)
200 hPa geop, wind and variance of EPS wind perturbations 1993-01-25 12h
942
s
t
904
1285
802
t
30.0 m/s
Figure 16 : The 200 hPa geopotential and wind field 25 January 1993 12 UTC with the variance of
the EPS wind perturbations. The trough over southeastern USA and northern Mexico is coupled to a
major baroclinic development. The EPS has identified this trough as potentially unstable and
suggested large variations in its intensity. Due to the smallness of the Coriolis parameter at lower
latitudes a more correct representation of the perturbations is achieved by the wind than by the
pressure or geopotential field. Note the strong ageostrophic winds over southern USA
4.3 The ECMWF ensemble prediction system - an overview
The ECMWF Ensemble Prediction System (EPS) has been a part of the operational production since 1992. The EPS simulates possible initial uncertainties by
adding, to the unperturbed analysis, small perturbations within the limits of uncertainty of the analysis. From these, a number of different forecasts are produced
(Mureau et al, 1993; Molteni et al, 1996).
At the time of writing (Spring 2001), 50 perturbations are computed over the
Northern Hemisphere. A set of perturbations is computed separately over the
Southern Hemisphere. This forms the basis for 50 alternative forecasts, run with
approximately half the horizontal resolution (TL255) compared with the deterministic forecast (TL511) and with 40 levels in the vertical instead of 60 (Buizza et al,
1999). The different initial states are a priori assumed to be equally likely.
Fields from the free atmosphere are archived every 12 hours. Weather parameters like 2 m temperature, 10 m wind, precipitation and cloudiness are archived
every 6 hours. Also the maximum and minimum temperatures are archived (see
ch.5). One forecast, Control, is run at TL255L40 with a non-perturbed analysis.
46
3.1
4The Ensemble Prediction System (EPS)
4.4 Perturbations
The success of any ensemble system depends on its ability to identify regions
where small uncertainties in the analysis are likely to have significant impact on
the forecast, and to create structures which will simulate these uncertainties.
4.4.1 The calculations of perturbations in the mid-latitudes
The EPS perturbation technique, based on a mathematical method called singular vector analysis, tries to identify the dynamically most unstable regions of the
atmosphere by calculating where small initial uncertainties would affect a 48 hour
forecast most rapidly, i.e. both increasing or dampening the forecast amplification
of a developing baroclinic system or unstable ridge (Buizza and Palmer, 1995).
The first 25 of these singular vectors, chosen not to overlap too much, are
combined in a linear way to calculate hemispheric structures (separately for each
hemisphere) which are able to have a significant effect on the forecast after 48
hours.
RMS of EPS perturbations 500hPa Z 1997-10-12 12 UTC
140 W
160 W
O
O
20
O
180
O
160 E
O
x yz
N
30
O
30
O
N
N
140 E
O
120 W
O
120 E
O
100 W
O
100 E
O
|
80 E
O
O
80 N
O
80 W
|
70 N
O
O
60 E
|
60 N
O
60 W
O
|
50 N
O
O
30
{ wv
N
40 E
40 N
O
O
20
u wv
O
N
40 W
O
20 W
O
0
O
20 E
O
Figure 17 : The rms of the EPS perturbations at 500 hPa 12 October 1997 12 UTC. The system has
identified the regions over Canada and Alaska as particularly sensitive to possible uncertainties in
the analysis. Lower down in the troposphere (not shown) the conditions over western USA is also
identified as sensitive.
3.1
47
4The Ensemble Prediction System (EPS)
By reversing the signs, 25 “mirrored” perturbations are produced, yielding a
total of 50 global perturbation fields. These initial perturbations are scaled so that
their local maxima are comparable to local analysis errors, and to have a realistic
ensemble spread after 48 hours. The final perturbations are spatially uncorrelated.
They are also considered a priori to be equally likely.
Member 1 500hPa Z 1997-10-12 12utc+12h
Member 1 500hPa Z 1997-10-12 12utc+120h
-7.8
0.0
-1.2
3.0
-24.6
-1.3
}
47.9
~
36.9
-1.3
-8.8
0.1
0.6
-0.8
2.2
-50.6
11.3
Member 2 500hPa Z 1997-10-12 12utc+12h
Member 2 500hPa Z 1997-10-12 12utc+120h
30.2
-3.1
1.1
1.1
-13.6
-0.1
-2.7
1.2
63.0
21.5
-30.8
-0.5
0.8
-2.3
}
17.0
Figure 18 : The EPS perturbations at 500 hPa 12 Oct 1997 12 UTC at initial time, at +12 h and at
+120 h for members 1 and 2. For these pair wise members the initial perturbations have opposite
signs and mirror each other, but gradually the differences become random.
To further improve the spread and realism, perturbations from two days back
are computed and added to the TL255L40 (Barkmeijer et al, 1999). There are no
perturbations within 30 latitude degrees on either side of the Equator. The forecasts
for the Tropics are affected by influences propagating in from the extra-tropics.
The success of the EPS over Europe is determined to what degree it can correctly account for the uncertainties and alternative developments of an upstream
baroclinic development. Most of the EPS perturbations which are of importance
for the medium range forecast over Europe on a weeks range are inserted in the
analysis of baroclinic systems over the north Pacific.
48
3.1
4The Ensemble Prediction System (EPS)
4.4.2 The simulation of model errors
Although the main approach has been to simulate the effects of possible
errors in the initial conditions, increasing research work is devoted to simulate the
effect the finite resolution of the model grid or simplified representation of the
physical processes. These will have importance in connection with strong physical
forcing, for example when tropical cyclones enter the mid-latitudes and interact
with the baroclinic development in the westerlies. The source of such errors has
been addressed by the introduction of stochastic physics (Buizza et al, 1999). For
each ensemble member, the stochastic physics perturbs grid point tendencies by up
to 50%, with a spatial correlation radius of 10 latitude degrees and a time correlation interval of 6 hours. The whole globe is perturbed, including the Tropics. The
non-perturbed Control forecast is run without stochastic perturbations.
4.4.3 Simulating uncertainties in the Tropics
To improve the ensemble forecasts of developments which are greatly influenced by physical processes typical of lower latitudes, in particular tropical
cyclones, work is under way to introduce a scheme for creating perturbations specially designed for the Tropics (Puri et al, 1999). Recent experiments have shown
that they also can improve also extra-tropical developments
4.5 Spread–skill
Depending on the particular hemispheric flow pattern, forecasts originating
from perturbed analyses develop more or less differently during the course of a ten
day forecast.
4.5.1 Basic interpretation of the spread
If model errors played no role, and if initial uncertainties were fully included
in the EPS initial perturbations, a small spread among the EPS members would be
an indication of a very predictable situation. In other words, whatever small errors
there might be in the initial conditions, they would not seriously affect the deterministic forecast. In these cases extended and/or detailed forecast interpretations
are possible. By contrast, a large spread indicates a large uncertainty of the deterministic forecast, which prevents any extended or detailed forecast interpretation.
3.1
49
4The Ensemble Prediction System (EPS)
4.5.2 The provision of alternatives
But the EPS does not limit the interpretation of the spread just as a measure
of uncertainties. The information will also suggest possible alternative developments and their respective likelihood. Last but not least, it will also indicate what is
not likely to happen, which at times might be as important as knowing what is
likely to happen. When, on some rare occasions, the spread might cover most of
the climatological range, then nothing can be deduced from the forecast about any
significant deviations from climate.
4.5.3 The spread is not a unique value
The spread-skill interpretation of the EPS is complicated by the fact that in
one and the same forecast the spread often varies considerably from one parameter
to another. A small spread in the 500 hPa geopotential forecasts does not necessarily imply a small spread in for example the forecast precipitation, and vice verse
(see chapter 8 for further discussion).
4.6 EPS clustering
To compress the amount of information being produced by the EPS and
highlight the predictable and thus relevant parts, individual EPS forecasts, which
are “similar” according to some norm, are grouped together and averaged to constitute new forecast fields, so called clusters. The norm for judging this “similarity”
can be the correlations between the fields or, as in the ECMWF system, their RMS
differences.
4.6.1 The operational clustering
The ECMWF operational clustering algorithm is based on the RMS differences between the 500 hPa geopotential height ensemble forecasts, averaged from
+120h to +168h taking the synoptic continuity into account. It is always the same
members which make up the contents of each cluster
For two EPS members to join the same cluster they must display more or less
the same synoptic 500 hPa development from +120 to +168 hours whereby a synoptic consistency is thereby obtained. This would not be the case if the clustering
was made separately for each day in the forecast.
50
3.1
4The Ensemble Prediction System (EPS)
There are occasions when two members in the same cluster can be rather different at the beginning or end of the period, but sufficiently similar during the rest
of the time interval to be placed in the same cluster. On the other hand, two members, being similar during a part of the period, may be placed in different clusters if
they are sufficiently different during most of the period.
The number of clusters depends on three factors:
•
•
•
The spread of the day, i.e. the EPS standard deviation,. It is varying from day to day, but follows a seasonal trend as the forecast errors, with higher values in winter than in summer
The clustering threshold used to limit the clusters standard deviation. It follows the same seasonal trend as the spread and errors
The degree of “multi modality”, the tendency of the forecasts to form discrete alternatives. For
the same spread and threshold a multi modal distribution might lead to a smaller number of
clusters than a mono modal distribution.
A large spread in the ensemble does therefore not necessarily lead to more
clusters, nor does a small spread necessarily lead to fewer.
The clustering is performed separately for the whole of Europe plus four
European sub–domain. The clustering over one sub-domain with respect to the
position and intensity of a dominating feature will then be made without considerations of the uncertainties in the forecast of a blocking over another sub-domain.
EPS orography and clustering domains
70°N
60°N
50°N
40°N
30°N
30°W
20°W
10°W
0°
10°E
20°E
30°E
40°E
Figure 19 : The five main clustering areas, the European and four sub-areas..
3.1
51
4The Ensemble Prediction System (EPS)
4.6.2 The “tubing” clustering
Another clustering method, called tubing, averages all ensemble members
which are similar, on a RMS basis, to the ensemble mean and excludes members
which are significantly different. The average of all these “similar” members provides a more refined ensemble mean, the central cluster mean. The excluded members are grouped together in a number of "tubes" (maximum 9) each represented by
their most extreme member allowing to better visualize the different scenarios in
the ensemble.
The central cluster mean and the tubes are computed for the whole forecast
range. For each tubing reference step (+96h, +144h, +168h, +192h and +240h),
tubing products are generated over a 48-hour sequence finishing on the reference
step (for example +48/+72/+96h for the +96h tubing), allowing a sequential view
of the different tendencies. In the case of the +168h tubing, the sequence is over 96
hours, from +72h to +168h. The results are then applied to the 1000 hPa geopotential and 850 hPa and 500 hPa temperature. Tubes are computed over each of the
five geographical domains Europe, NW Europe, NE Europe, SW Europe and SE
Europe. They do not intended to serve as probability alternatives, only to give an
indication of what is not included in the central cluster.
4.6.3 No ideal clustering
Every possible clustering is a compromise; the advantage of condensing
information has to be paid by the risk of losing information which on some occasions, in hindsight, might have been important. There is really no superior or
objective measure of which type of clustering is "best". Clustering can be performed over larger or smaller geographical areas, on different parameters, it can be
done for each forecast time or for a longer period. Other possible ways:
clustering using correlation measures will highlight similarities in the patterns but may group
together forecasts which differ in the overall level of temperature and geopotential heights.
clustering according to the 500 hPa flow might in a zonal situation give one cluster, whereas if
the clustering had been performed on the MSLP pattern, the differences in the position and
intensity of zonally moving baroclinic waves might have created 3–4 clusters.
clustering on individual forecast days will have the advantage that each day can be judged by
its own merits; the disadvantage is that the temporal continuity and synoptical consistency will
be lost.
Ideally the forecaster should have access to more than one clustering method,
since what is the "best" clustering will vary according to the weather situation.
52
3.1
5The forecast products
5 The forecast products
5.1 The operational schedule
ECMWF produces global analyses for the four main synoptic hours 00, 06,
12 and 18UTC, and global 10–day forecasts based on 12 UTC analysis. An additional analysis is run for 00 UTC with a cut–off time of around 3 hours, followed
by a global 3–day forecast to provide some Member States with boundary conditions to their limited area models.
5.2 Direct model output
The model variables for the computation of the forecasts are temperature,
wind and specific humidity. These primary parameters are converted into other
atmospheric parameters. Tables 5 and 6 summarize the main output of the forecast
model. These parameters are computed at 3–hourly intervals from 6 to 240 hours,
based on 12 UTC data.
Table 15: Upper air parameters
Geopotential height (not on model levels)
Temperature
Vorticity and Divergence
Wind (U and V components)
Vertical Velocity
Specific Humidity
cloud ice/water content on model levels
Upper-air parameters are produced on the original model levels and on
standard pressure levels (1000, 925, 850, 700, 500, 400, 300, 250, 200, 150,
100, 70, 50, 30, 20, 10, 7, 5, 3, 2 and 1 hPa).
3.1
53
5The forecast products
Table 16: Surface and single level parameters
Mean sea level pressure
10 metre wind
2 metre temperature
2 metre dew point
Maximum and minimum 2m temperature since previous post-processing
Large scale and convective precipitation
Snowfall
Surface temperature and soil wetness
Snowdepth
Total cloud cover
Low, medium, high and convective cloud cover
Surface fluxes, surface stress, surface roughness, albedo
Solar and thermal radiation
The 2 metre temperature and dew point and the 10 metre wind are computed
from the values at the lowest model level (approx. 30 metres above ground) and at
the surface, taking into account a prescribed state of the surface (albedo, roughness
etc.). Analysis fields for 00, 06, 12 and 18 UTC including additional fields such as
model orography, land sea mask, percentage of vegetation, etc. are also available.
It should be borne in mind that surface parameters and cloud and radiation parameters are not analysed in the present system. The analysis and forecast output is
archived into MARS (the ECMWF archiving system of meteorological data, cf.
Meteorological Bulletin M1.9/2).
5.3 Dissemination products
A subset of parameters is available to ECMWF Member States through the
operational dissemination system (table 17; cf. Meteorological Bulletin M 3.1 (2)
for a description of the system). All parameters are available in lat-lon grid form,
upper air parameters (except humidity) are also available in spectral form.
54
3.1
5The forecast products
Table 17: ECMWF dissemination products
Operational products
Additional experimental products
Upper air parameters (on pressure levels and
model levels)
Upper air parameters (on pressure levels and
model levels)
Mean sea level pressure
Mean sea level pressure
to day 7
from day 71/2 to day 10
2 metre temperature
2 metre dew point
10 metre wind
2 metre temperature
2 metre dew point
10 metre wind
total precipitation
total cloud cover
total precipitation
total cloud cover
to day 7 (every 3 h up to day 3, every 6 h
beyond
from day 71/2 to day 10
Additional weather parameters:
large scale precipitation
convective precipitation
low cloud cover
medium cloud cover
high cloud cover
snowfall
snowdepth
throughout the forecast range
Table 18: ECMWF dissemination EPS products
Control and Perturbed forecast products:
Levels and validity: 1000, 850, 700,500,200 hPa for +0 hour to +240 hour forecasts
at 12 h interval
Geopotential, temperature, u- and v-velocities, specific humidity, vertical velocity,
vorticity, MSL pressure, divergence
Surface products: Large scale precipitation, convective precipitation, snow fall, total
cloud cover, 10 m u- and v-components, 2m temperature and dew point temperature,
two metre maximum and minimum temperature, all for +0 to 240 h at 6 h interval
3.1
55
5The forecast products
Table 18: ECMWF dissemination EPS products
Cluster and ensemble means and standard deviations:
Geopotential 1000 and 500 hPa
Temperature 850 and 500 hPa
Validity: for means +72 hour to +168 hour forecasts at 12 h interval, for ensemble
standard deviations +0 hour to +240 hour forecasts at 12 h interval
Tubes
Geopotential 1000 and 500 hPa
Temperature 850 and 500 hPa
+48 to +96h for the 96 h tubing, +96 to +144 h for the 144 h tubing, +72 to +168h
for the 168 h tubing, +144 to +192 h for the 192h tubing and +192h to +240h for the
240h tubing.
Forecast probability products:
850 hPa anomaly probabilities
cold anomaly of at least -8K
cold anomaly of at least -4K
warm anomaly of least +4K
warm anomaly of at least +8K
850 hPa anomaly probabilities from day 6 to10, day 6 to 7 and day 8 to 10
average temperature at 12 UTC more than 2K below climate
average temperature at 12 UTC more than 2 K above climate
Precipitation probabilities over 24 hours
at least 1 mm
at least 5 mm
at least 10 mm
at least 20 mm
Precipitation probabilities from day 6 to10, day 6 to 7 and day 8 to 10
less than 0.1 mm over the period
mean precipitation rate less than 1 mm/day
mean precipitation rate greater than 3 mm/day
mean precipitation rate greater than 5 mm/day
Wind probabilities
at least 10 m/s
at least 15 m/s
56
3.1
5The forecast products
5.4 Products on the GTS
A limited quantity of ECMWF analysis and forecast products is disseminated via the GTS. The product range is summarized in table 19.
Table 19: ECMWF products on the GTS
Northern and southern hemisphere:
MSL pressure
850 hPa temperature
500 hPa geopotential
Validity: 12 UTC analysis, 24, 48, 72, 96, 120, 144 and 168 hour forecasts
Tropics (35N - 35S):
850 hPa winds
200 hPa winds
Validity: 12 UTC analysis, 24, 48, 72, 96 and 120 hour forecasts
Code form:
FM47-V GRID (5ox5o resolution)
FM92-Ext. GRIB (2.5o x 2.5o resolution)
5.5 Data archives
Weather forecasting makes use and generates very large volumes of data that
need to be stored for long periods. ECMWF operates a comprehensive data service
from its archives. In particular, it maintains an archive of level III-A atmospheric
data in support of projects associated with the WMO World Climate Research
Programme.
This includes observations, analysis, forecast and also research experiments.
ECMWF has accumulated 150 Tbytes (150,000,000,000,000 characters). These
data represent a valuable asset, providing a detailed record of worldwide weather
and weather forecasts over the past 25 years. To accommodate these data, ECMWF
3.1
57
5The forecast products
has a dedicated Data Handling System. In order to manage and access this large
archive, ECMWF has developed a dedicated software: the Meteorological Archive
and Retrieval System (MARS). Data is stored in standard formats agreed with the
World Meteorological Organisation, namely GRIB format for meteorological
fields and BUFR format for meteorological observations. Retrievals can be easily
prepared making use of a pseudo-meteorological language.
5.6 Access to archived data
All authorised users within Member States and Co-operating States can
access ECMWF’s archive and retrieve data. This can be done either through the
lines between ECMWF and Member States or through the Internet. For research or
education purposes from states which are not Member States or Co-operating
States. This service is provided at handling cost. Access for commercial purposes
is also possible, but then the request must go via one of the Member States.
5.7 Retrieving data from the ECMWF archives
Analysis and forecast values are available for every 6 hours, for surface
parameters every 3 hours up to the 72 hour forecast range. The exact value of these
parameters might be affected by the way data is selected, interpolated and presented.
5.7.1 Temporal resolution
The range of the daily variation of the 2 metre temperature is best estimated
by retrieving the forecast daily maximum and minimum values since the forecasts
valid times do not necessarily coincide with the times of the local diurnal extremes.
Precipitation forecasts are time integrated values for the last three hours,
after 72 hours every 6 hours. No information about the occurrence of precipitation
at the specific UTC times can therefore be deduced. The same applies to the other
parameters which are accumulated, such as evaporation.
5.7.2 Horizontal and vertical resolution
The ECMWF forecast products can be retrieved at a wide range of resolutions, from coarse lat-lon grids to the original reduced Gaussian grid of about 60
km. The data can be retrieved both from model, pressure and isentropic levels.
58
3.1
5The forecast products
Two meter temperature forecast T511 Thursday 1 February
¤ 2001 12 UTC+60h
¬4 ¬
2 ¤2 ¤
¦0 ¤2 § ¤
8« ¤ ¤
8« ¤
¤
¬
¤-2-1¥ -1¥ -1¥ -2¤ 4 ¬ © 5 10¦ 1312 12 ¬ 13 12¤ 8« 2 3¨ § 4 ¤ 7 § 9 10¦ 12¤ 9 12¤ 12¤ 11¬ ¤ 2 3¨ © 52 © -15¥ ª-1¥ 10¦ 12 12¤ £ 12¤ ¤ 12¤
¬
¦
0
13
7
6 10
§
12 13 14 © ¬
¦ 11 11 12 13
-1¥ -3¨ ¬
9 12 ¬
5 7 7
14 13 13
-4 -1¥ ¤ 24 9 13 13 1314 14 13
-4
13 13
¤ ¤
4 3¨ ª 6 ª 6 §
13 13 13 ¬
1¥ ¦ 0
¬
13
4
¬
©
13
13
¥
1
¬
© 5 ¤ ¦ 0 1¥ ¤ -1 10¦ 13 13 14 14 14¬ ¬ ¬ 13¬ 13 14 14¬ ¬ ¬ 14¬ 11 8« 5 ¬ 4 ¬ 4 ¬ 9 12 12¤
2
3
¨
14
14
4 11
ª
¬
§ 9 © 2 ¬ 1¥ 3¨ § ¤ 1¥ 11 13 13 13 13 14¬ ¬ 14
¬ 14¬ 14© 14¤ ¬ 12¤ 13 1514© 1514© 10¤ ¦ © 6 © 5 © 5 ¬ 4 ¤ 2 3¨ 8« 1112
13 13
9 12
14 14
5 4 §
14
13
ª
¬
12
¤
13
¤ 9 12 13 13 13 13 13 13 13 13 13 14¬ 14¬ 15© 12¤ 6 6 7 14¬ 14¬ 14¬ 5 ¬ 21¥ 3¨ ¬ 4 ¦ 0 ¦ 0 -1¥ 8«
13 12
15 12 7 ¡ ¢ © ¬
11 4 3¨ 4
13 13
¬14 ¬ 13
¬
13
¦ 0 -2
¬ 13
13 14
11 15 14 ¬ ©
-2
¬
¤ ¦ 0 ¤ 2 8«
¬ 13 13
13 14
13 13
14 15 11 ª 6 ©
¬14 ¬14 ¬ 14¬ 13 13
¬
¬14 14 14
¬
13
¬
5 1¥ ¦ 0 ¦ 0 1¥ ¬
13 14
¬ ¬ 11 13 14 ¬ ¬ ¬ ©
¬ 13 14 ¬ 14¬ 1413
4
14 14
¬14 ¬ 13 14¬ 1313 ¬ 14 ¬ 14¬ 14¬ 1414
¬ ¬ ¬ ¬ 14¬ 14¬ 1413¬ 14¬ 14 13 14¬ 14¬ 1414¬ 1414¬ 14¬ 15¬ 13¬ 7¬ © 5 1¥ ¦ 0 ¤ 2 3¨
¬
14
14
14
14
©
14
14
¬ ¬ 13 13
14 ¬ ¬ ¬
14 14
¬ 14 © 14 © 14¬ © 14¬ 14¬ 1013¦ 11 §11 14¬ ¬ 14© ¬ 14¬ 14¬ 14¬ 1414¬ 14¬ 10¬ ¦ 5 7¤ ª 6 ª © 5
13 13 ¬ 14
14 14
¬ 14
¬14 ¬ 13
¬
14 14
8
«
15
10
¦
¬
¬
9
¬
©
14 15 14 14¬ 14¬ 14¬ 14¬ 14¬ 13¬ 12¬ 8« 6
13 14 ¬ ¬
¬
14 15 © © 15 15 14
14 14
©
15 15 © © © 13 8« 8«
¬ ¬ 14
© ¬ © ¬ © 14 14 14 14 13 10¦
©
14
¬14 ¬ 13
©
15
15
13
14
¬ © © 15 15 15© © © 15 15 14¬
15 14
14 14
¬
14
¬
©
©
8
«
©
15
15
14
¬ ¬ ¬ 14 14¬ ¬ ¬ 15 15 © © © 15 15 15© ¬ § 7 13 15 14¬ 15¬ 14¬ 15© 15© © 14© ¬ 14¬ 14¬ 14¬ 13
14 14
© © 15
© © ª 14¬ 9 78« 10¦ 14¬ ¬ ¬ 14¬ 14 15 15 15 14¬ 15© 14¬ ¬
¬ ¬ 14
¬ ¬ 14
© 15
15 15
15 15
¬ 14
¬
© 15
14
14 14
14 14
¬
©
¬14 14
15
©
¬
¬
15
¬ © © 15 15 15© 16© 14© 11© 13 14¬ 14¬ 1514© 14¬ 14© 14¬ 15¬ © 15© 15© 15© 15© 15© 15© 14¬
¬ ¬ 14
14 14
¬14 ¬ 14
¬
14
©
¬
15
14
©
¬ ¬ 15
© © © 15© 15 15 15© 15© © © 15© 14 14 14 15© 15© 15© 15© © ¬
¬ ¬ 14
¬ 15
¬ 14
¬ 14
©
¬ 15
15 15
15 14
14 14
¬ 14
14 14
¬ 14
© 15
¬
14 14
¬
¬
14 15
© © 15© 15© © 15© 15© 15© 1515© 15ª 15ª 15ª 15© © 15© 15© 15© 15© 15© 15
© 15©
¬
14
¬
¬
14 15
¬14 14 14 14¬ © 14
¬
14
©
¬
15
©
16
14
©
16
©
¬
15
©
©
©
16 15 15 15
14 14
©
©
15
©
©
¬
15
11 11
ª
15
©
ª
¬ ¬ ¬ 15 15 15 14¬ © © 15© 15 16 16 16ª ª ª ª ¬ 15 15 15 15 14¬
¬ 4 © © 11 12¤ 13 14 14
14 14
¬ ¬
16 16 16 14
©
15
¬
§
¤
13
5
¬ 4 ¤ 5 ¬ 4 ª 6 § 14 12 11 1114 14 14 14¬ 15© 14¬ 1315 15¤ 15 15¬ © 15© 15© 15© 16ª 15
© 11 11
7 13
ª 6 13
7 11
© 5 ª 69
8« 9 ©
12 13 14 ¬ ¬ © ©
11 11 ¤ ¤
3¨ 2 ¤ ¬
¦ 0 1¥ ¦ 0 2 4 3¨ 3¨ ¤ 5 3¨ ¬ 4 ¬ 4 3¨ ¬ 12 ¬ 12 ¬ 11 ¤ 2 ¤ 2 ª 6 11 14 14¬ 15© 15© 16ª 15© 12¤ § 9 8« ¬ 45 7
1
4 4
2 1¥ ¤
13 14 15 15 © ª
1¥ 1¥
4 ¤2
2
15 16
¦0
¦0
0
4
8
12
4
8
12
4
12
8
12
8
4
0
4
12
8
8
12
12
8
4
8
12
8
12
4
È 0 ¶ É¿
9
Two meter temperature forecast T255 Thursday 1 February 2001 12 UTC+60h
Ð
14
Ð
À
12
³ Ê
2
Ê
12
È
Ð
14
Ê2
10
8
É9
4
Ï
1
Ë
3
Ð
Ð
14
Ì
15
11
13
º
Ê´
Á
13
13
8
4
2
Ð4
Ë
3
Ð
Ð
14
Ì
15
13
Ð
14
Ñ6
8
3
Ë
È0
10
13
Ñ6
Ì
Ì
15
Ì
1
14
Ð
14
15
15
Ð
Ì
Ì
Ì
Ì
15
Ì
Ï
Ê
Ð
Ì
15
Ï
1
12
15
Ì
15
Ñ6
Ð
15
15
-3
® -3Ë
14
Ì
Ð
È
ϲ
14
14
14
Ì
15
1
Ð
14
12
Ì
15
14
12
Í
13
Ð
14
13
Ì5
14
Ð
14
8
8
Ð
14
Ð
Ê
12
ÊÆ
12
Ë
È0
Í
3
14
13
É9
8
Ê
12
12
Ð
14
12
Ð
14
¯
Ê
Ð
14
Ð
14
12
Ë
12
ÇÊ
12
Ê
3
Î7
Ð4
·
ÃÄ ¼ Ð4
14
Ð 12Ê
Ê
12
15
15
Ì
14
10
15
14
Ð
13
Ð
10
È
8
14
4
Ì
15
Ð
14
14
Ð
14
9
11
12
Ì
Ð
14
Ð
14
Ð
14
Ê
14
Ê
12
Ê
12
Ð
Ð
14
É9
14
½
Ê2
8
Ð
Ð
Ð
Ì5 ¸
13
É °9
13
14
Ð
14
14
Ð
13
Ð
15
Ð
14
Ð
Ð
13
13
14
14
Ð
14
14
13
13
Ð
14
14
Ð
14
Ð
13
13
14
Ð
14
Ð
14
13
13
12
4
Ð
14
Ð
13
13
13
Ê
12
È
10
0
Ð
Ð
Ê
12
12
Ê
Ê
12
13
14
11
12
14
Å
11
Ê2
0
13
É9
Ë
3
8
ϱ
È
10
¹
Ê2
-2
-1
Ê2
11
4
Ê
Ê -2
-2
Ê2 µ ¾
4
Ê
-2
8
Ò
Â
Ð
È
Í » 7 8Í
8
12
Figure 20 : The a) T319 and b) T159 gaussian grid data. There are 4 grid points over Corsica in the
T319, none in the T159. The same for Sardinia is 8 and 2 respectively.
3.1
59
5The forecast products
The reduced Gaussian grid values should not be considered as representing
the exact location of the grid point, but as a mean within a two– or three–dimensional grid box. This is particularly important for precipitation forecasts where the
variance of the observations within the grid area can be as large as the area average.
Any comparison or verification should then be against some spatial average around
the grid point. For near surface parameters the distinction between land and sea
points may be crucial, for example for 2 m temperature, precipitation or 10 m
wind. Note that the 1.5˚ x 1.5˚ lat-lon grid value are point values interpolated from
the reduced Gaussian grid and do not represent a mean over the 1.5˚ x 1.5˚ lat-lon
area.
5.7.3 Orography
As mentioned in ch. 2.2.1, valleys and mountain peaks are smoothed out by
the model orography. Due to this difference the direct model output of 2m temperature represents an altitude significantly different from the real one. A more representative height might be found in one of the nearby grid points. Any remaining
discrepancy can be overcome by a correction using the Standard Atmosphere lapse
rate, or statistical adaptation (see ch.7.4)
5.7.4 Islands and peninsulas
Some small islands and narrow peninsulas are not represented in the model
with land points (see 21.2). Also here statistical interpretation schemes might be
beneficial.
5.7.5 Interpolation
Repeated interpolations, horizontally or vertically, will smooth the fields and
dampen the extreme values. Graphical systems also introduce a slight smoothing.
This might in some applications, like upper air fields, have a positive effect on the
forecast quality, but for surface fields it might give unrealistic values. The use of
the model’s own reduced Gaussian grid is highly recommended. If, due to lack of
archive storage or limitation on the telecommunications links, compromises have
to be made with the retrieval of other fields, it is suggested that upper air fields, in
particular from the EPS are retrieved with a coarse resolution, for example 5 x 5
deg, to allow for high resolutions of the near surface weather parameters.
60
3.1
5The forecast products
ñ
0
÷9 å
ø
õ
ó
ó
13
õ
õ
ç
ß
4
ò8
11
8
ó
è
ò8 à
4
ö
ô
16
ô6
÷9
õ
14
15
ô
15
Ù ó3
8
0
ö
ö
÷9
Ý
Ó×
ñ 0 ð0
16
ê
â
8
15
ö
14
13
15
ö
15
ö
14
15
15
ö
15
12
ò8
ö
ø2
1
õ
õ
ø
12
4
14
14
15
ö
15
ð0
1
õ
14
ö
14
ò8
13
ñ
õ
14
4
õ
12
ó
õ
ò8 Õ ò8
é á8
11
8
ð0
õ
14
õ
14
õ
15
Þ
10
14
ð
10
ð
õ
14
Õò
ö
15
Û æ
ö5
14
õ
12
15
ö
15
õ
14
õ
ö í 88
15
ö
15
õ
14
12
ö
14
ö
15
ø
14
ö5
ò8
14
îï
12
õ
14
ö
14
õ
14
ë
õ
õ
12
ö
14
4
õ
14
õ
13
7
ã ö5
14
Ô ù7
15
õ
14
õ
14
ö
14
õ
14
ó
13
õ
13
õ
14
ó
13
ó
13
õ
13
ó
13
ó
13
ó
12
Ø
ó
1
8
14
õ
14
÷9
ø
12
12
ð0 Ö
Ü 1ñ
4
8
ð0
ì 13ó
ù7
Interpolated to 1 x 1 deg. grid
ä
8
12
4
ù7
12
õ4 Ú
8
Two meter temperature forecast T511 Thursday 1 February 2001 12 UTC+60h
15
Two meter temperature forecast T511 Thursday 1 February 2001 12 UTC+60h
0
0
8
12
14
12
15
4
1
8
15
14
8
14
15
14
12
8
14
14
14
14
14
15
12
15
15
15
8
10
14
11
8
15
12
0
14
14
þ ú
-1
0
14
8
14
ü 0
6
4
14
14
ÿ
14
12
14
0
7
û
13
4
12
13
8
8
4
12
1
8
4
9 Interpolated to 1.5 x 1.5 deg. grid
5
12
10
13
8
4
ý
8
û
67
Figure 21 : The impact of interpolation to a) 1.5 deg. and b) 2.5 deg. latitude-longitude grids. Note
than in contrast to the previous figure b, the 1.5 deg. grid makes the values from Sardinia “spill over”
into Corsica due to the interpolation.
3.1
61
5The forecast products
62
3.1
6The verification of ECMWF forecasts
6 The verification of ECMWF forecasts
As part of the monitoring and validation of the model performance, a wide
range of verification statistics is produced at the ECMWF. Some are mathematical
and measure the accuracy of the forecasts or their correlations, others measure
their skill by using reference forecasts and others still focus on the utility aspects.
6.1 The standard verifications of deterministic forecasts
At ECMWF several types of statistical verification scores are computed for a
number of areas and parameters, and stored in a historical data base. Most of them
have been defined in agreement with other NWP centres and are regularly
exchanged following WMO/CBS recommendations. The most common are the
Root Mean Square Error (RMSE), here denoted E, the root mean square difference
between forecast and analysis
2
E = ( f – a)
2
and the Anomaly Correlation Coefficient (ACC), the correlation between the
forecast and analysed anomalies.
( f – c)(a – c)
ACC = --------------------------------A f Aa
Both scores are highly flow dependent. When the flow is zonal the RMSE
will take small “good” values, during highly anomalous situations the quite large
and “bad” values. The opposite is true for the ACC which can score quite badly in
zonal situations when the positions of shallow troughs are out of phase. In blocked
situation the high degree of anomaly can compensate for rather significant errors.
The RMSE takes higher values during winter than summer, the ACC shows less of
seasonal variations.
The interpretation of these two scores is not trivial; for medium range forecasts, in contrast to short-range forecasts, it is not always the case that the lower the
RMSE and the higher the ACC, the better the forecast. To understand why, let us
decompose the RMSE into terms which measure different aspects of what determines the value of RMSE.
3.1
63
6The verification of ECMWF forecasts
6.1.1 RMSE – a simplified analysis
If f and a are the forecasts and the verifying analyses, and c the climatological value of the day of verification, then assuming there is no bias in the forecasts,
the square of RMSE can be written
2
2
2
2
2
E = ( f – a) = ( f + c – c – a) = ( f – c) + (a – c) – 2( f – c)(a – c)
where the overbar denotes averages in time, i.e. over a large number of forecasts, and space. This can be written:
2
2
2
E = A f + A a – 2cov ( ( f – c ) ( a – c ) )
The first term on the r.h.s. Af2 represents the forecast variance around climate. It depends on the realism of the atmospheric model. The second term Aa2 is
the analysis variance around climate. It is set by the character of the atmospheric
flow during the period.
The same analysis can be conducted in graphical form in a phase–space,
using vector algebra where the observed anomaly a-c and the forecast anomaly f-c
are represented by vectors of length Af and Aa separated by an angle ß. It can be
shown that the ACC=cos(ß) and that the distance a–f is proportional to RMSE
(Persson, 1996)
Figure 22 : A schematic representation of the relation between the magnitude of RMSE and ACC
and the level of anomaly (a-c respective f-c). The vectors f-c and a-c represent the average level of
dynamic variability. The value E will be affected by the length of these vectors.
64
3.1
6The verification of ECMWF forecasts
For a realistic model these two terms should be equal, i.e. the model’s variance around climate should be the same as the atmosphere’s or at least the analysis.
Since both Af2 and Aa2 vary strongly with seasons the RMSE tends to have a large
seasonal variation with maximum in winter and minimum in summer.
The third term represents, in some sense, the “skill” of the forecasts. It measures the covariance between forecast and observed anomalies. For forecast ranges
without any predictive skill, this last term is zero. With Af=Aa we get an expression
for an upper limit of the average RMSE values, the so called “error saturation level,
the limit where any informative value in the forecast is lost. This also follow from
the vector diagram above for the case when β=90
E saturation = A a 2
6.1.2 Understanding RMSE verifications
Before the NWP subjective forecasts tended to be cleverly quasi-linearly
extrapolated persistence forecasts which, while preserving a realistic variation
around climate, with increasing range approached a climatological statement.
Whereas a persistence forecast, which always will display the full variability of the
atmosphere, will approach the higher saturation level, the subjective forecasts
PRE−NWP
WEATHER FORECAST
tended to approach anACCURACY
error levelOFwell
below.
1.5
1.4
1.3
1.2
RMSE (climate fcst=1.0)
1.1
*
1.0
0.9
0.8
0.7
0.6
RMSE of saturation level
RMSE of climatological forecast
RMSE of persistence forecast
RMSE of subjective forecast
0.5
0.4
0.3
0.2
0.1
0.0
0
1
!2 "3 #4 $5 %6 &7 '8 (9 10
Forecast range
) (days)
11
!
12
"
13
#
14
$
15
Figure 23 : A schematic representation of the pre-NWP accuracy of weather forecast measured in
RMSE with the climatological variance as norm.
3.1
65
6The verification of ECMWF forecasts
Like a persistence forecast, a NWP forecast will with increasing range,
approach the error saturation level. A forecaster, just following the NWP, would
then be less accurate than a a pre-NWP forecast and even worse than a climatological forecast. When the RMSE=Aa the forecast has the same accuracy as a climatoACCURACY OF NWP BASED
+ WEATHER FORECAST
logical statement (and the ACC=50%)
1.5
1.4
1.3
1.2
1.1
RMSE (climate fcst=1.0)
1.0
0.9
*
0.8
0.7
0.6
RMSE of saturation level
RMSE of climatological forecast
RMSE of subjective forecast
RMSE of NWP output
RMSE of modified forecast
0.5
0.4
0.3
0.2
0.1
0.0
0
1
!2 "3 #4 $5 %6 &7 '8 (9 10
Forecast range
) (days)
11
!
12
"
13
#
14
$
15
Figure 24 : Schematic representation of the accuracy of NWP based weather forecasts with the
variance around climate as norm.
The art of forecasting is to relay on the latest observation in the very short
range, approach climatology for very long ranges and in between judge which flow
ACCURACY OF ENSEMBLE MEAN
WEATHER FORECASTS
8
patterns are more likely to verify, which often means those of the largest scales.
1.5
1.4
1.3
1.2
RMSE (climate fcst=1.0)
1.1
7
1.0
0.9
0.8
0.7
0.6
0.5
0.4
0.3
RMSE of NWP output
RMSE of modifications to NWP
RMSE of EPS ensemble mean
0.2
0.1
0.0
,0 1- .2 /3 04 15 26 37 48 59 10,
Forecast range
6 (days)
11
.
12
/
13
0
14
1
15
Figure 25 : A schematic representation of the accuracy of weather forecasting using the Ensemble
Prediction System.
66
3.1
6The verification of ECMWF forecasts
Whereas a forecaster can only apply his experience which scales are predictable at a certain range, the ensemble mean from the EPS is able, at every instant, to
determine which particular atmospheric features are predictable at different locations. The EPS can also, although will be outside the ability of the ensemble mean
to appreciate, suggest which features have a certain risk of occurring, something
the purely statistical-empirical methods are unable to do.
6.1.3 Interpretation of the RMSE
Since the general level of RMSE also depends on the range of atmospheric
variability, changes in the RMSE level, from one season or year to another, might
therefore not necessarily be due to changes in the model characteristics, but to the
nature of the atmospheric flow. Comparing verifications is therefore really only
possible when the general variability of the atmosphere has been on the same level.
The same is true for individual forecasts. A phase error of half a wave length
or more will score worse than if the system had not been forecast at all. The RMSE
will punish the former forecast twice: for not having a low where there is one, and
for having a low where there is none. .
F +132h Member 10 RMSE=9.3 hPa
D
99
1000
C
0
98
0
0
99
??
0
99
;;
99
1000
:
B
>
0
00
10
E
1000
1000
<=
980
UV
T
1000
H
A+132h Member 44 RMSE=11.3 hPa
0
990
F+132h Member 36 RMSE=9.2 hPa
L
K
99
F +132h Member 12 RMSE=8.5 hPa
G
1010
@
1010
0
101
99
Y
00
P
1010
N
990
1000
QR
20
10
101
0
S
10
O
M
98
10
10
IJ
W
980
10
10
0
1000
9
A+132h Control T255 RMSE=6.7 hPa
0
MSLP 1999-12-04 00h
X
1000
Figure 26 : On 4 December 1999 Denmark was severely hit by an extremly forceful storm (upper
left). An experimental EPS was run with higher resolution, T255. This is a selection from the +132 h
forecasts. The Control is in upper centre followed by four members. The RMSE score is noted to the
right in the heading. Not having the storm yielded lower RMSE, than having the storm with minor
position or phase speed errors.
3.1
67
6The verification of ECMWF forecasts
6.1.4 Interpretation of the ACC
Since the ACC measures the correlation between anomalies, it is sensitive to
similarities in forecasts and analysed patterns, rather than their absolute values. In
contrast to RMSE the ACC has a tendency to score higher (small ß) during meridional flow situations (large Aa and Af) and lower (large ß) during periods of predominantly zonal flow (small Aa and Af). While the RMSE is rather sensitive to
errors in the position and intensity of strong vortices, the ACC might easily score
badly in a generally shallow field, if the forecast and observed positions vortices
are out of phase. ACC displays a weaker seasonal and annual variability than
RMSE. From synoptic-empirical investigations it has been found that the level of
ACC=60% corresponds to the limit where the forecast does not exhibit any significant skill. It can be shown mathematically that the limit ACC=50% corresponds
with the forecast range where a climatological forecast would score as well in
RMSE as a categorical forecast.
6.1.5 Measures of dynamic activity
Comparing verifications between different models or different versions of
the same model, is really only possible when their general variability is on the
same level. It is therefore important to compare the statistical scores with the variance of the forecast and analysed fields. What looks statistically "good" might be
synoptically “bad”, what looks statistically "bad" might be synoptically “good”.
Since intense cyclogeneses and blockings become more difficult to forecast
with increasing lead time, any forecast system which gradually, during the forecast, decrease their frequency or amplitude, will therefore display better statistics,
in particular using the RMSE.
Different variance measures are used to make sure that the dynamical activity in the ECMWF forecasts is the same as the one observed throughout the forecast period. One method calculates the daily variance of the field over a certain
area, another the monthly or quarterly variance for every grid point in an area, and
a third method calculates the RMS of the 12 or 24 h change in the forecasts. All
these variance measures are compared with the corresponding variances from analysed fields.
Because the definitions of RMSE and ACC do not involve any threshold such
as a level of error that makes the difference between a useful and a useless forecast,
they belong to the family of continuous scores. Example of categorical scores will
be discussed in section 6.2.
68
3.1
6The verification of ECMWF forecasts
6.2 Hit rate and False alarm rate
Verification measures like the RMSE and the ACC will value equally the
case of an event being forecast, but not observed, as an event being observed but
not forecast. But in real life the failure to forecast a storm that occurred will have
much more dramatic consequences than forecasting a storm that did not occur. To
assess the forecast skill under these conditions another type of verifications must
be used.
For any threshold (like frost/no frost, rain/dry or gale/no gale) a forecast can
be simplified to a yes/no statement (categorical forecast). The observation itself can
be put in one of two categories (event observed/not observed). Let H denote “hits”,
i.e. all correct yes-forecasts - the event is predicted to occur and it does occur, F
false alarms, i.e. all incorrect yes-forecasts, M missed forecasts (all incorrect noforecasts that the event would not occur) and Z all correct no-forecasts. Assume
Table 20: A forecast/verification table
forecast\obs
observed
not obs
forecast
H
F
not forecast
M
Z
altogether 100 forecasts of this type with H+F+M+W=100. A perfect forecast
sample is when F and M are zero. The ratio of observed to non-observed cases
(H+M)/(F+Z) is determined by the verification sample (sample climate) and is
independent of the forecast quality.
The Proportion of Perfect Forecasts is PPF=(H+Z)/100.
The Hit Rate HR=H/(H+M), the proportion of perfect forecasts when the weather
occurred.
The False Alarm Rate FAR=F/(F+Z), the proportion of forecasts of the event when it
did not occur. HR and FAR can be combined into a diagram, the Relative Operating
Characteristics (ROC) to compare deterministic and probabilistic forecasts (see 6.2.4
below)
The Probability Of Detection, POD=H/(H+M), is the proportion of perfect yes-forecasts.
The Frequency Bias Index, FBI=(H+F)/(H+M), measures the relative frequency of
occurrence in the forecast with respect to observations that is not measured by the
True Skill Score. It serves the same function as the dynamic activity in the forecast
verification using the RMSE or the ACC
The False Alarm Rate FAR=F/(F+Z) is the proportion of yes-forecast of the event
when it did not occur.
3.1
69
6The verification of ECMWF forecasts
A very simple measure of success of categorical forecasts is the difference
POD-FAR which is known as the Hansen-Kuiper or True Skill Score. Among
other properties, it can be easily generalised for the verification of probabilistic
forecast (see 6.3 below).
6.3 Verification of probabilistic forecasts
In contrast to a deterministic forecast an individual probabilistic forecast can
never be "right" or "wrong", except when 100 or 0% have been stated. Due to its
nature the performance of the EPS can therefore only be evaluated from large samples of forecasts. However, like the deterministic forecast system the performance
is determined not only by its predictive accuracy but also its ability to account for
the variability of the atmosphere.
6.3.1 The Brier score
The most common verification method for probabilistic forecasts, the Brier
score BS is similar to the RMSE, measuring the difference between a forecast
probability of an event p and its occurrence o, expressed as 0 or 1 depending on if
the event has occurred or not. As with RMSE, the lower the Brier score the “better”
BS = ( p – o )
2
A Brier Skill Score (BSS) is conventionally defined as the relative probability score compared with the probability score of a reference forecast
BSS = ( BS ref – BS ) ⁄ ( BS ref )
The BS score can be decomposed in a similar way as the RMSE, yielding
three terms which help to explain different aspects of the scoring system
2
2
BS = ( p k – c ) + ( c k – c ) + ( 1 – c ) ⋅ c
where a sample of N forecasts has been divided into categories (k=1,2,3...T)
each comprising nk forecasts of average probability pk . The observed frequency in
each frequency is ck and c the observed frequencey of the whole sample. The first
term expresses the degree of reliability, the second the resolution and the third the
uncertainty of the forecasts (Atger, 1999)
70
3.1
6The verification of ECMWF forecasts
6.3.2 The reliability, resolution and uncertainty
The reliability term measures the ability of the system to forecast accurate
probabilities. After a large number of, for example 20% probability forecasts, the
predicted event should verify for 20% of the forecasts, not more, not less. The
degree of reliability is displayed in a diagram where the x-axis is the forecasted
probability p and the y-axis theTYPICAL
frequency
on those occasions.
RELIABILITY
DIAGRAM
] it occurs
^
Very good reliability and resolution
100
90
Observed frequency (%)
80
\
70
60
50
40
30
20
10
Z
0
0
10
20
30
[
40
50
60
Forecast probability (%)
70
80
90
Z
100
Figure 27 : An example of very good reliability and resolution. The area of the circles are
proportional to the number of forecasts.
Ideally the distribution should lie along the 45˚ diagonal. When the low risks
are underestimated and the high risks overestimated, the forecasts have been overconfident and the distribution is flatter than 45˚. On the other hand, if the low risks
have been overestimated and the high risk underestimated the forecasts are under–
TYPICAL RELIABILITY DIAGRAM
confident and the distribution is
steeper
than
b poor45˚
Good resolution but
reliability
100
90
Observed frequency (%)
80
a
70
60
50
40
30
20
10
0
_
0
10
20
30
`
40
50
60
Forecast probability (%)
70
80
90
_
100
Figure 28 : An example with good resolution but poor reliability since the high and low probabilities
are under respective overforecast.
3.1
71
6The verification of ECMWF forecasts
The resolution indicates the average square difference between the observed
frequency in each category and the mean frequency observed in the whole sample.
It indicates the ability of the forecast system to correctly separate the different categories, whatever the forecast probability. For a given reliability, the resolution
thus indicates the sharpness of the forecast. The maximum resolution corresponds
to a deterministic forecast (only 0% and 100% are forecast), the minum resolution
RELIABILITY DIAGRAM
corresponds to a climatologicalTYPICAL
forecast
(only one probability is forecast).
Very good reliabilityf but bad resolution
100
90
Observed frequency (%)
80
e
70
60
50
40
30
20
10
0
c
0
10
20
30
d
40
50
60
Forecast probability (%)
70
80
90
c
100
Figure 29 : An example of good reliability but poor resolution. The high and low probabilities are
rarely forecast, whilst the near climate probabilities are forecast at a majority of times.
For operational purposes, the resolution term is the most relevant, since the
reliability, as any bias, can generally be improved by a calibration. However, this is
obtained at the expense of sharpness. The resolution is not modified by the calibration if the number of categories remains the same and the EPS error characteristics
TYPICAL RELIABILITY DIAGRAM
remain stable from one season to
another. h improved reliability
Good resolution and good,
100
90
Observed frequency (%)
80
i
70
60
50
40
30
20
10
0
g
0
g
10
g
20
g
30
g
h
g
g
40
50
60
Forecast probability (%)
g
70
g
80
g
90
g
100
Figure 30 : By multiplying the forecast probabilities in figure 27 by 0.6 and adding 20 the forecasts
will be calibrated to yield a very good reliability, but with a reduction in resolution.
72
3.1
6The verification of ECMWF forecasts
The uncertainty is the variance of the observations, indicating the intrinsic
difficulty in forecasting the event during the period. It is also the probability score
of the sample climatology forecast. The uncertainty is obviously independent of
the forecast system: eing the same for the reference forecast and the forecast under
evaluation, it plays no role in the skill score - but it can be shown to be an upper
bound for the resolution.
The Probability skill Score can thus be decomposed into two terms, positively orientated, indicating (i) the skill due to the reliability and (ii) the skill due to
the resolution:
PSS = ( Reliabilit y ref – Reliability ) ⁄ PS ref + ( Resolution ref – Resolution ) ⁄ P S ref
Reliability and resolution are independent. For example, if the observed frequency is 90% in the 10% probability category, and 10% in the 0% probability category, the resolution is high but the reliability is poor.
Dec00-Feb01 t + 96
Europe obs
24h-precip gt 1 mm
1
0.2
0.9
0.8
0.1
2634
0.7
obs frequency
0
j
s
0
0.6
1162
0.2
0.4
u
0.6
0.8
rel FC distribution
t
1
o
0.5
959
r
0.4
822
q
814
0.3
o
858
0.2
p
803
n
989
1222
0.1
0
k0
2410
1819
0.1
0.2
0.3
0.4
0.5
0.6
0.7
forecast mprobability
0.8
0.9
l1
Figure 31 : An example of a reliability diagram of the probability that the 72 to 96 hour forecast
precipitation will exceed 1 mm during winter 2000-2001. The reliability is not perfect since high
probabilities are over-estimated. The diagram to the right shows the frequency of forecast
probabilities, indicates a fair resolution. By a calibration, multiplying all forecast probabilities by 0.7,
the reliability curve can be made to approximately coincide with the diagonal. But then no
probabilities exceeding 70% would be forecast
3.1
73
T(850) anomaly [K]
19991201-20000229 STEP 120
6The verification of ECMWF forecasts
freq / expected freq
4
6.3.3 Talagrand
diagram
3
In anv ideal EPS system the verifying analysis is equally likely to lie between
2
any two ordered
adjacent members, including the cases when the analysis will be
outside the ensemble range on either side of the distribution. In such an ideal system the long1term distribution should be flat with equally many verification in each
interval. A measure of the degree this is satisfied can be made by a so called Talagrand diagram.
0
wxyz{|}~
nr diagram is slightly U–shaped
In reality the distribution in theinterval
Talagrande
with around 10% of the analyses verifying outside the ensemble. This is an indication that there is not enough spread in the EPS.
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031323334353637383940414243444546474849505152
T(850) anomaly [K]
19991201-20000229 STEP 144
freq / expected freq
4
3
2
1
0
wxyz{|}~
interval
nr
0 1 2 3 4 5 6 7 8 9 10111213141516171819202122232425262728293031323334353637383940414243444546474849505152
Figure 32 : The x-axis in a Talagrand diagram constitutes all the members in the ensemble, ordered
according to some norm, for example the 850 hPa temperature in a certain point. For an EPS with 50
members there are 51 intervals including the unlimited intervals at the edges of the distribution. The
y–axis indicates the number of cases the analysis is found between two ordered adjacent members
on the x-axis. The U-shape indicate that the ensemble does not spread out sufficiently, the tendency
to have a J-shape that the system has a slight cold temperature bias.
Improving the spread is a necessary, but not sufficient condition; a random
sampling of weather parameters from the same season from the last 50 years would
provide a flat distribution in the Talagrand diagram, but of course with no predictive skill. Any improvement in spread in EPS forecasts must come through improving the system’s ability to identify all the possible uncertainties in the initial
conditions. Due to the limited number of EPS members, the verifying analysis will
be outside the ensemble range. For a system with 50 members this will happen 2/
51 (~4%) of the time. At present the proportion of outliers is 2–3 times this value.
74
3.1
6The verification of ECMWF forecasts
6.4 Skill scores
While all the previous scores have been absolute, in the sense that they are
not related to any comparison, the following ones measure the skill relative another
method, which can be climate or an alternative model.
6.4.1 The Brier Skill Score
The Brier Skill Score (BSS) is computed with reference to the Brier Score of
another probabilistic forecast, like for example a climatological distribution.
BS
BSS = 1 – ----------
BS cl
6.4.2 The ROC diagram
Probabilistic forecasts can be transformed into a categorical yes/no forecasts
defined by some probability threshold. The corresponding hit rates H and false
alarm rates F can be computed and entered into a ROC–diagram with H defining
the y-axis, F the x-axis. The closer the F, H is to the upper left corner (low value of
F and high of H) the higher the skill. A perfect forecast system would have all its
points on the top left corner, with H=100% and F=0. .
Figure 33 : An example of a ROC diagram. The highlighted points on the curve illustrate the relation
between the probabilities and the rate of hits and false alarms. If a yes/no decision is made on a 20%
level, then the hit rate is likely to be 0.4, the false alarm rate less than 0.1.
3.1
75
6The verification of ECMWF forecasts
In reality a non-perfect system will have its values on a long convex curve
pointing to the upper-left corner (the “ROC curve”). The area between ROC curve
and the y-axis and the y=100% axis measures the skill of the forecasts
The ROC curve enables a comparison between a probabilistic and a deterministic forecast system. If the deterministic F,H value lies over the ROC curve,
the deterministic system is more skilful. However, in terms of utility, greater
advantages might be gained from the probabilistic information in the ROC curve. It
takes very good deterministic forecasts to be more useful than probabilistic ones.
6.4.3 The Rank Probability Score (RPS) and the Continuous Rank
Probability Score (CRPS)
With the output from the EPS the probability of any event (according to
some threshold) can be calculated and subsequently verified by the Brier Score.
The mean of a range of such verifications by itself defines a new score, the Rank
Probability Score (RPS). If the intervals between the consecutive thresholds
become infinitesimal small (or the number of thresholds infinitely large) an integrated value of the Brier Score can be defined, the Continuous Rank Probability
Score (CRPS).
6.5 Decision making from meteorological information
Ultimately the motivation for weather forecasts are the guidance they give in
decision makings, their utility. A forecast system that provides good scores normally also provide good guidance for a wide range of needs. But the exceptions are
numerous. A forecast system that over-forecasts the occurrence of rain will score
badly, but will be very useful for anyone who is sensitive for rain. On the other
hand, a forecast system which might provide useful guidance for most applications, can be without value for other applications because the skill is not be high
enough.
6.5.1 Decision making from categorical forecasts
A common situation in decision making is to weight the cost C of taking a
protective action against the risk of making a loss L when no protection is made.
Thanks to the rich statistical data meteorological decision making can easily be
mathematically analysed. If the climatological risk of adverse weather is c then
constant protection is favourable if the economic risk cL is larger than the cost of
protection C. The breaking point occurs when cL=C or c=C/L.
76
3.1
6The verification of ECMWF forecasts
The "cost–loss ratio", C/L, is an important indicator of the sensitivity to
weather forecast information. If C/L < c a permanent protection will be favourable,
if on the other hand C/L > c it might be economic to take the risk that hazardous
weather might occur.
6.5.2 A clarifying example
At a certain location it rains two days a week. The climatological risk is then
2/7. Someone organizing an outdoor public event hesitates between having to pay
for rain protection, costing $200, or taking a chance, in which case if there is rain,
his loss will be $1000. With a climate with two rain days out of seven, his expected
daily loss would be slightly above $280 (=2000/7) so he is well advised to invest in
protection.
However, if the protection cost had been $400, he would have been wise to
take a chance since this cost exceeds the expected loss. The same would have been
the case if the loss in case of rain would only have amounted to $500. His expected
loss would then only be $140 (=1000/7).
The Economic Value of Weather Forecasts
Cost−Loss situations for different end−users
Cost−Loss situations for different end−users
900
900
800
800
700
700
600
500
400
300
200
600
500
400
300
cost of protection
no need for weather info
200
100
0
0.0
1000
Expected Monetary Value
Expected Monetary Value
1000
The Economic Value of Weather Forecasts
Area of useful
forecast info
100
0.1
0.2
0.3
0.4 0.5 0.6
Probability
0.7
0.8
0.9
1.0
0
0.0
0.1
0.2
0.3
0.4 0.5 0.6
Probability
0.7
0.8
0.9
1.0
Figure 34 : A schematic diagram of the cost/loss situation for a decision maker facing a
possible loss of $200 in case of adverse weather (left), a loss of $1000 (right). The cost of
protection is $300 in all cases (horizontal dashed line). The x-axis indicate the risk of
adverse weather, the y-axis the economic expenses. In a situation when the cost of
protection is always higher than the potential loss (left) there is obviously no need for
weather information. Note that even perfect forecasts will be associated with losses, since
the decision maker has to take protective actions (inclined dashed line or the right)
3.1
77
6The verification of ECMWF forecasts
The cost/loss concept also explains why some end-users are not served by
weather forecasts, even if these are of high quality. In the case the cost for protection is low compared with the value of what should be protected, permanent protection becomes beneficial, and there is no need for weather forecast information.
In case the protection is so expensive compared to the value, protection can only be
considered, if at all, if the forecast probabilities of bad weather are sufficiently
high. The closer C/L is to c the more important weather forecast information
becomes. For the extreme cases when C/L << c or C/L>>c there might be no need
for weather forecast information.
6.5.3 The need of forecast information
When the loss might exceed the cost of protection, meteorological information will reduce the losses in two ways: pure climatological information will
prompt the user to always take protection if the region has a climatological risk
larger than 30%. Forecast information will tell when the synoptic risk is different
from the climatological and reduce his losses.
78
3.1
7The use of deterministic medium range forecasts
7 The use of deterministic medium
range forecasts
7.1 Introduction
The many meteorological parameters which is produced by the medium
range forecast system do not seem to need any "interpretation". Time series of the
forecast temperature, cloud cover, wind, rain etc. presented graphically for a specific location (“meteogram”), can be read off by meteorologists as well as laymen.
However, care must be observed in the interpretation. The figure below shows two
consecutive forecasts of the22meter
metertemperature
temperature
a location
forecastin the Netherlands.
10forday
VOLKEL EPS forecast 960201
20
today’s forecast
15
observation
yesterday’s fcst
Temperature (C)
10
5
0
−5
−10
−15
−20
1
2
3
4
5
6
7
Forecast range (days)
8
9
10
Figure 35 : The forecast 2–meter temperature development for a location in Holland in winter 1995
according to two consecutive ECMWF forecasts. The filled circle at the start of the meteogram
indicates the observed 12 UTC temperature.
–The last forecast indicates a return to milder conditions a week into the
forecast whereas the forecast from the day before indicated continued cold conditions. Does this indicate that today’s forecast is less reliable? A further potential
problem might be that the temperature on the first day does not correspond with the
forecast. Does this mean that the rest of the forecast be trusted?
7.2 What can the forecaster do?
Whereas in short range forecasting it is a useful technique to modify the
NWP products quasi-linearly in light of later information, this is not possible in the
3.1
79
7The use of deterministic medium range forecasts
medium range. The impact of an analysis change remains approximately linear
only up to 48 hours. Beyond this range it is normally impossible without computer
based calculations to deduce how later information ought to modify the forecast.
The forecasters have possibilities to make positive correction for systematic
model deficiencies due to poor representativeness, limitations in the horizontal resolution or in connection to some physical processes. This is in particular true for
mountainous regions where the model orography differs from the real. However,
the forecasts of the large scale flow do not exhibit any significant systematic errors
which can be taken into account by the forecasters.
Paradoxically, the forecasters best opportunity to add value to the forecast
rests with addressing the non-systematic errors, in particular of the movements,
positions and intensifies of synoptic features. They can add substantial value to the
NWP not by adding information, but by removing information.
7.3 Scale and predictability
The range of meteorological scales is the same throughout the forecast; a ten
day forecasts looks like a analysis of the atmosphere. But the predictability of these
scales decrease rapidly throughout the forecast, starting with the smallest scales.
Predictability spectral analysis
500hPa Kinetic Energy
50
2001
1993
Total wave number
40
30
20
10
0
48
72
96
120
144
168
192
216
240
Forecast range (h)
Figure 36 : The relation between the scale of an atmospheric feature at 500 hPa, measured by the
number of spectral components needed to describe it, and its predictability. Forecasts beyond five
days normally contain useful information only in the first 10-15 spectral components. Since 1993 the
predictability, measured in this way, has increased by one day.
80
3.1
7The use of deterministic medium range forecasts
By relying on his experience of what is normally predictable at a certain
range, the forecaster can disregard the small and unpredictable scales, but concentrate on the large scale.
Just reading off the maps or the NWP output would convey the lack of predictability in the smaller scales and inconsistency in full to the public. They might
therefore lose confidence in the forecasts well before they have verified. It is of little use to issue a very confidently sounding forecast if it is not likely to verify.
There are different techniques to highlight the larger, more predictable scales
and by filtering eliminate small scale and less predictable features.The most consistent way to filter away the non-predictable synoptic scales is the Ensemble Prediction System (see ch. 8)
T20 2001-02-05 12h
500hPa Z 2001-02-05 12h
H
L
H
L
L
L
L
L
L
L
L
L
L
L
H
T15 2001-02-05 12h
T10 2001-02-05 12h
L
L
L
L
H
H
L
Figure 37 : The 500 hPa flow 5 February 2001 12 UTC with different spectral truncations.
Rainfall can for example be more skilfully forecast beyond D+3 if accumulated values over two or more days are calculated. The advantage of condensing
information has to be paid by the risk of losing information which on some occasion, in hindsight, might have been important.
The larger the scale an atmospheric system, the more predictable it normally
is. Small baroclinic systems or fronts are well forecasted up to around D+2,
cyclonic systems around D+4 and the long planetary waves around D+6. The later
relate to the general weather type. The forecaster using the ECMWF deterministic
3.1
81
7The use of deterministic medium range forecasts
forecasts will most of the time be able to make useful forecasts up to a week ahead,
although the timing of cyclones or fronts might be in error.
The skill of the forecast for different phenomenon versus range as follows.
Table 21: The current skill in NWP
Feature
<D+3
D+3 to D+5
D+5 to D+7
D+7 to
D+10
Hemispheric
flow transitions
Excellent
Excellent
Good
Some skill
Blocking creation and breakdown
Perfect
Good
Fair
Low skill
Cyclones’
cycle
Perfect
Fair
Low skill
–––
Fronts and 2nd
developments
Good
Fair
–––
–––
Temperature/
wind
Very good
Skill in daily
extremes
Skill in 5–10 day mean
Acc.precip./
mean clouds
Good
Some skill
Some skill in precipitation 5–10 day
acc. values
life
The predictability can vary considerably from situation to situation. Sometimes a D+4 forecast can be wrong even in the large scale, occasionally the D+7
can be perfect even in details.
Considering the speed by which atmospheric systems influence each other
charts plotted to be used in medium–range forecasting should have a wide geographical coverage. Whereas an European–Atlantic coverage is suitable only for a
two day forecasts, three to five day forecast are best understood when also the
western part of the Atlantic and the easternmost part of North America are
included. For forecasts beyond five days the whole of the North American continent and easternmost Pacific ought to be included.
7.4 The day–to–day inconsistency
Changes in the forecast from one day to the other are necessary to enable a
forecast system that take full benefit of new observations and modify previous
analyses of the atmospheric state. Since the latest forecast is based on more recent
data than the previous forecast, it is on average better. Although in most cases the
82
3.1
7The use of deterministic medium range forecasts
changes in successive NWP forecasts are quite small, at least for the first five or six
days, occasionally there might be large differences. This occurs when new observations have appeared in dynamically sensitive areas, or when these areas have
moved into regions with observations.
500hPa Z 2001-02-01 12h
¡
H
2001-01-26 12h fc t+144
¡
H
¢
L
¢
L
¢
L
¢
L
2001-01-27 00h fc t+132
¢
2001-01-27 12h fc t+120
¡
L
H
¢
L
2001-01-28 00h fc t+108
2001-01-28 12h fc t+96
¢
L
¢
L
Figure 38 : Five ECMWF 500 hPa forecasts verifying on 1 February 2001 12 UTC. All are fairly
consistent and skilful, except the 27 January 12 UTC forecast, which brings in a cyclone over
Scotland. This was later found to be caused by complex analysis problem of a baroclinic zone in the
NW Pacific.
The fact that the model can develop synoptic features with the same overall
frequency, means that there are no constraints to prevent forecast changes. In contrast to a numerical model, a forecaster should not be inconsistent since this will
have a psychologically adverse effect on the public. It is normally almost impossible to determine in each individual case which one of the inconsistent forecasts is
the best, if any of them.
3.1
83
7The use of deterministic medium range forecasts
Since non–predictable scales are those which will first be affected by any
inconsistency the best advice is to try to avoid coming in the situation by having
over-interpreted details in a previous NWP, scales which are normally not predictable. Cases when the inconsistency affects even the largest scales are rare, but sufficiently common to be of concern. These can only be dealt with in an EPS context
(see chapter 8)
7.4.1 Consistency and skill?
There is no significant difference in quality between consistent and inconsistent forecasts. During several ECMWF Training Courses the attendees have as
excercises made subjective evaluations of forecast consistency and skill and foundcorrelation between 29% and -20%. The reason why objective verifications show
correlation around 30% is due to a statistical artefact.
To illustrate this imagine a realistic but completely skill-less forecasts system, for example forecasts 50 days ahead. The 37 day forecast from today compared with a 38 day forecast from yesterday both lack skill and are not correlated.
Still their errors correlate 50% since they verify on the same analysis and their difference correlate also 50% with the error (see figures below). For shorter lead
times, when both the skill of the forecasts increase, the consistency/error correlation drops paradoxically to typical values of 20-30% for day 5 and 6 forecasts. This
is because the forecasts, with their increasing skill, also start to become mutually
correlated.
a
f-a
a–c
£c
f–c
f
Figure 39 : With the notation used in figure 21 it is easy to understand why the maximum RMSE
level for a realistic but completely skill-less forecasts f (orthogonal to the verification a ) is 1.414
times the variance around climate.
84
3.1
7The use of deterministic medium range forecasts
¾
¤¦¥ §
¨ª© «
¹»º½¼
¿
¬®°¯
Á
¶°¸ ·
±³²µ´
À
Figure 40 : The case with two realistic, but completely skill-less forecasts f and g, can be illustrated
in the same way, as a three-dimensional vector diagram. The consistency then is the vector
difference between the two forecasts f-g. This vector difference, together with the error vectors f-a
and g-a form an equidistant triangle.
a
60°
Ã
Ã
Âg–a
f–a
60°
f
60°
f–g
Âg
Figure 41 : The angles in an equidistant triangle are 60 deg, and since cosine(60)=0.5 the
correlation between the RMS errors as well as between the consistency and errors are 50%. If we
from the previous figure imagine that the skill improves, this will lead to some correlation between f-a
and g-a. The angle will be >60 and consequently the two other angles will together be >120, with at
least one >60. If f-a has lower RMSE than g-a, it will be the angle between f-a and f-g which
becomes >60 and thus yielding correlation <50% whilst the angle between g-a and f-g will be <60%
and the correation > 50%.
3.1
85
7The use of deterministic medium range forecasts
The level of inconsistency depend on the quality of the preceding forecast,
not the current one (Persson and Strauss, 1995, Persson, 1997). Indeed, the correlation between the D+5/D+6 consistency and the error of the D+6 is 70-80%! Unfortunately, this can not be used for operational purposes since a consistent D+6,
although of higher quality will not be better than the last D+5 - which it resembles
anyhow.
7.4.2 Beware of consistent forecasts!
Experience shows that forecasters, in spite of all the difficulties, manage to
handle inconsistent forecast situations well. It is in cases with several days of consistent forecasts, when the forecasters can find themselves in great difficulty when
the NWP suddenly changes direction. In these situations, the lack of forecast alternatives might give the forecasters a false feeling of reliability, which does not prepare them for possible new developments.
7.4.3 The poor man’s ensemble approach
A look at the last 2-3 forecast will help to identify those scales which, in
spite of all the “jumps” remain consistently forecast and therefore ought to be more
predictable; the inconsistent parts will provide information about possible alternative developments. This “poor man’s ensemble forecast” approach, which also can
involve other models, provides further possibilities to add value to the forecast.
7.4.4 Misleading “systematic errors”
It is important to realize that some non-systematic errors can easily be misinterpreted as being “systematic”. Verifications over a long period of time will show
that more cut-offs are forecasted at D+6 west of the Iberian Peninsula than actually
verify. This does not necessarily mean that the model is over-forecasting these cutoffs. There are cases when the D+6 fail to forecast a cut-off, and statistical studies
86
3.1
7The use of deterministic medium range forecasts
show that approximately the same number of cut-offs are forecast as are observed they just do not always match at a D+6 range!
Å500 hPa Z 2001-01-11 12h Cut-off observed
Æ500 hPa 2001-02-05 12h No cut-off observed
Ä
L
Ç500 hPa Z 2001-01-05 00h fc t+144 No cut-off
È
500 hPa Z 2001-01-30 00h fc t+144 Cut-off forecast
Ä
L
Figure 42 : The lack of skill forecasting cut-offs west of Portugal does not only involve 'misses”,
failures to forecast a specific cut-off (left column), but also “false alarms”, cases when a cut-off is
forecast but does not verify (right column).
This misinterpretation of “systematic errors” comes back in many disguises.
If, for a certain location, the number of cases with heavy rain (more than 20 mm/24
h) forecast on equals the number of cases observed, there is obviously no systematic model error. But since the heavy rain forecasts do not always verify it might
give an impression that the model is forecasting heavy rain “too often”. Judging
from the number of cases of obsered heavy rain, the model instead appears to forecast these event “not often enough”. Forecasts of extreme events
Extreme weather events are coupled both to the small and large atmospheric
scales. The large scale extremes can be long periods of anomalous temperatures or
rainfall over large areas. These situation, often coupled to persistent blocked flow,
are skilfully forecast, five days or more in advance. For small scale extreme events,
like heavy rainfall, strong winds and rapid changes in temperature the forecast skill
decreases from day 3 onwards (see table 10).
The difficulty with extreme weather events is that the forecasting system
should on one hand detect as many of these as possible, without too many false
alarms. What is “too many” is ultimately a matter of subjective choice (See. ch. 6.2
and 6.5). The ECMWF has chosen to maintain a uniform variability in the model
over the ten day forecast range with neither over- nor under-forecasting (see. ch.
3.1
87
7The use of deterministic medium range forecasts
6.1.4). This is important to make it possible for the EPS to forecast extreme developments. It also the EPS that provides the most consistent treatment of extreme
event forecasting.
7.5 Statistical interpretation of deterministic forecasts
A dynamical–statistical interpretation can be produced for any particular
weather parameter (predictand) e.g. precipitation, cloud, visibility, temperature,
provided that historical data for the location exists. Some techniques also partly
compensate for the model’s systematic errors.
7.5.1 Non-adaptive interpretations
There are two traditional statistical interpretation methods: the Perfect Prog
Method (PPM) and the Model Output Statistics (MOS) technique. In the PPM a
statistical relationship is established between observed values of the predictand and
analysed predictors from the free atmosphere; in the MOS a statistical relationship
is established between observed values of the predictand and forecast predictors,
both from the surface and the free atmosphere. If the model has a tendency to
under– or over–forecast any predictor, this will be compensated for by the MOS
technique Murphy and Katz, 1985, Glahn et al, 1991).
7.5.2 Adaptive interpretative methods
Adaptive methods, in particular the Kalman filter. It shares MOS’ advantage
of being able to compensate for model errors while at the same time being able to
continue to work despite changes in the model characteristics. In contrast to MOS
and PPM, the adaptive filter does not need any long historical data base, statistical
interpretations can provide skilful interpretations 2 or 3 weeks after the start. If the
model changes in any significant way, the filter will notice it and gradually, nor-
88
3.1
7The use of deterministic medium range forecasts
mally within 5–10 days, adjust the statistical relationship (Persson, 1991, WMO,
Kalman filtering of 2 m temperature forecasts
1992, Cattani, 1994).
VOLKEL (NL)
20
15
10
Temperature (C)
5
Ô
0
−5
1 Feb 1996
Ê Forecast
2−p Kalman filtering
−10
31 Jan 1996
Ê Forecast
2−p Kalman filtering
−15
−20
É
1
Ê2
Ë3
Ì4
Í
Ó
Î
Ï
5
6
7
Forecast range (days)
Ð8
Ñ9
Ò
10
Figure 43 : Kalman filtering of the ECMWF 2 meter temperature forecasts for Vokel in winter
1996.Relying on past verification a two-parameter filter has detected a tendency to under-forecast
the temperature by 1-5 degrees, depending on the forecast itself.
The most simple task is to modify the 2 meter temperature or the 10 meter
wind speed whichThe
mostly
convenient
Weather
relationhave
between
24 hour forecast
errorstructures.
and forecast
value parameástatistical
ters like rainfall, clouds
and
humidity
a more
Verification
of 24
h ECMWF 2 mhave
temperature
forecastscomplex
for Volkel Dec statistical
1995−Jan 1996 structures.
5
4
3
Temperature forecast error (K)
2
à
1
0
−1
−2
−3
than 30 days ago
âMore
26−30 days ago
â21−25 days ago
−4
−5
16−20 days ago
−6
−7
days ago
ã11−15
6−10 days ago
−8
Last five days
−9
Õ Ö × Ø Ù Ú Û Ü Ý
Þ Õ Ý Ü Û Ú5 Ù6 Ø7 ×8 Ö 9 10Þ
ß
−10
−10 −9 −8 −7 −6 −5 −4 −3 −2 −1 0 1 2 3 4
Forecast 2 meter temperature (C)
Figure 44 : The relation between the forecast 2 meter temperature value and the +24 hour forecast
error for Volkel during January 1996. The larger the circle, the more recent the verification. Although
there is an over-all bias of about -3 K, there is also a linear relationship which a two-parameter filter
can take advantage of and making small or no correction for forecasts between 5 and 10 C, whereas
forecast between -5 and -10 C are corrected with about +5 K.
3.1
89
7The use of deterministic medium range forecasts
It is essential to realize that it is only a 1-parameter Kalman filter which
removes plain biases, i.e. mean errors independent of the forecast values. For most
weather forecast parameters the mean error depends on one or several factors, in
particular the forecast itself. By using 2 or more parameters different corrections
can be applied in different weather regimes.
10
Temperature (Celsius)
0
-10
-20
-30
Observed T2m
ECMWF forecast
Kalman filtered T2m
10
20
30
40
50
60
November - December 1989
Figure 45 : Direct model output (shaded line) and 2-parameter Kalman filtered 12 UTC t+42h
temperature forecast (full line) valid at 06 UTC for Lulea, November-December 1988. The 2dimensional filter makes a start from ”scratch” on 1 November and after some weeks manages to
identify a relation between forecast error and forecasted temperature, according to which the
model underforecasted warm temperatures and underforecasted cold. When a cold spell sets in
mid-December the filter manages to make useful corrections, in the order of 10 degrees.
With the increasing level of output from the NWP systems, in particular the
EPS, the use of automatic statistical interpretation schemes, will become more necessary. The use of adaptive techniques minimizes any inconvenience due to
changes in the NWP forecast system.
90
3.1
8The use of the Ensemble Prediction forecasts
8 The use of the Ensemble Prediction
forecasts
The information from the Ensemble Prediction System (EPS) can be used to
formulate deterministic as well as probabilistic forecasts, both in a qualitative and
quantitative way. It is also possible to increase the usefulness and skill of the EPS
products by applying
different
kind of statistical
ð
2 meter
temperature
10post–processing.
day forecast
VOLKEL EPS ñforecast 960201
20
òcontrol
óeps members
15
óensemble mean
ôobservation
Temperature (C)
10
ï
5
0
−5
−10
−15
−20
ä
1
å2
æ3
ç4
è5
é6
î
Forecast range
(days)
ê7
ë8
ì9
í
10
Figure 46 : The same situation as in figure 14 but now with the output from the EPS. The Control is
supported by more than half of the EPS members, indicating a return to milder conditions after about
five days. A substantial minority support the forecast from the day before that it will stay cold during
most of the ten-day period.
There are mainly three strategies in formulating weather forecasts using EPS
information:
•
•
•
3.1
a categorical forecast with decreasing degree of details and/or confidence in
periods of low predictability;
a categorical forecast with more details and higher confidence, supplemented
with an alternative for the less predictable part of the forecast range;
a probabilistic forecast, indicating all possible developments with an indication
of their likely hood, in percentage.
91
8The use of the Ensemble Prediction forecasts
8.1 Deterministic use of EPS
Averages of the whole ensemble information, or different forms of classifications, like clustering or tubing, can be used for deterministic forecasting.
8.1.1 The ensemble mean
The ensemble mean is obtained by averaging all ensemble forecasts. This
leads to a smoothing of the forecast fields. This is also, but to a lesser extent, the
case with the central cluster in the tubing. The degree of smoothing depends on the
spread of the ensemble: when the spread is small it will be possible to follow individual synoptic systems, sometimes even fronts, into the medium range. When the
spread is large, only the largest atmospheric scales, the planetary (Rossby) waves
remain. Ensemble mean maps display a higher degree of skill and day–to–day consistency than the deterministic forecast.
8.1.2 The ensemble spread
The ensemble spread relates to the differences between ensemble forecasts.
Small spread indicates low forecast uncertainty, large spread high forecast uncertainty. It indicates how far into the forecast the ensemble mean forecast can carry
informative value. It helps the forecaster to express appropriate uncertainties.
Although the predictability decreases with forecast time, there are many occasions
when this is not the case. The developing of a cyclone early in the forecast might
be very uncertain, but not the formation of a blocking high some days later.
8.1.3 The combined use of mean fields and spread
The ensemble standard deviation field, 500 hPa geopotential height, superposed on the ensemble mean field of the same parameter, allows to identify the
meteorological features which are most affected by forecast uncertainty.
8.2 Mixed deterministic-probabilistic use of EPS
There is no sharp dividing line between products for deterministic or probabilistic forecasts information. Information extracted from probability distributions
can serve as a deterministic statement like the mean (the best estimate), the most
likely and the median. A confidence interval around the ensemble mean value adds
information on the uncertainty of the forecast.
92
3.1
8The use of the Ensemble Prediction forecasts
ö500hPa Z 1997-10-11 12h fc t+96
õ
L
÷
÷
500hPa Z 1997-10-11 12h fc t+120
500hPa Z 1997-10-11 12h fc t+144
ø
õ
H
L
õ
L
õ
L
ö500hPa Z 1997-10-12 12h fc t+72
õ
L
õ
L
ö500hPa Z 1997-10-12 12h fc t+96
õ
÷
500hPa Z 1997-10-12 12h fc t+120
L
õ
L
õ
õ
L
L
ø
H
ö500hPa Z 1997-10-13 12h fc t+48
õ
L
ø
H
õ
ö500hPa Z 1997-10-13 12h fc t+72
ö500hPa Z 1997-10-13 12h fc t+96
õ
L
õ
L
L
õ
õ
L
L
õ
L
ø
H
Figure 47 : A case of severe forecast inconsistency (or “jumpiness”): The upper row shows the D+4
to D+6 500 hPa flow pattern in the 11 Oct 1997 forecast; the middle row the D+3 to D+5 from 12 Oct
and the bottom row the D+2 to D+4 from 13 Oct. The forecasts in the left, middle and right columns
verify on 15, 16 and 17 Oct respectively. The forecasts from 11 and 13 Oct both indicate that a vortex
will move down from Iceland to the Bay of Biscay, with a ridge over central Europe. The 12 Oct
forecast has a different solution. The vortex is now forecast to stay south of Iceland while a new
trough is developing north of Iceland and moves to southern Scandinavia.
3.1
93
8The use of the Ensemble Prediction forecasts
ú
û
EM 500hPa Z 1997-10-11 12h fc t+96
ùL
û
EM 500hPa Z 1997-10-11 12h fc t+120
ùL
EM 500hPa Z 1997-10-11 12h fc t+144
EM 500hPa Z 1997-10-12 12h fc t+72
ùL
ùL
EM 500hPa Z 1997-10-12 12h fc t+96
EM 500hPa Z 1997-10-12 12h fc t+120
ùL
ü
H
ú
EM 500hPa Z 1997-10-13 12h fc t+48
ùL
ùL
ú
EM 500hPa Z 1997-10-13 12h fc t+72
ú
EM 500hPa Z 1997-10-13 12h fc t+96
ù
L
ù
L
ù
L
Figure 48 : The 500 hPa ensemble mean of the EPS forecasts 11-13 October 1997. The ensemble
mean chart from 11 October is similar to the deterministic forecast. The ensemble mean chart the
following day, the 12 October, did not support the operational forecast, since most members were
consistent with the previous days forecast. The following day, the 13 October, the ensemble mean
still supported the one-trough development. Interestingly, a closer examination of the 11 October
members (not shown), showed that more than a handful of them suggested a two-trough solution,
like the one that the deterministic forecast displayed the next day, on 12 October.
94
3.1
8The use of the Ensemble Prediction forecasts
8.2.1 Interpreting clusters and tubes
Clusters, to some degree also tubes, are useful for qualitative synoptic risk
assessments. The number of members in each cluster give its “weight” or probability, since all members are a priori regarded as equally likely. These probabilities
depend to some extent on the area. The forecasters are recommended to put more
emphasis on the sub-area clusters than the “European” cluster.
For one and the same weather situation, the number of clusters in the European area can differ from the numbers of clusters in each of the sub-areas. For
example, in a “European” perspective a blocking event might figure prominently in
the clusters. However, in a sub-area, not affected by the blocking, the clustering
might focus on differences in the forecast of a certain cut-off development.
8.2.2 “Similar” clusters not similar
Similar looking clusters might differ in the overall level of geopotential or
temperature: a cold westerly flow in one cluster will not give the same weather as a
warm westerly flow in another. This is an effect of clustering according to the RMS
differences. When estimating risks from the clusters, forecasters should take into
account that, for a specific location, different clusters might have the same consequences in terms of weather, temperature and wind.
8.2.3 The effect of averaging
During the late medium range, well defined synoptic system in the individual
ensemble member forecasts might, when averaged in a mean cluster, indicate a
weakening of the system. This paradoxical results occurs when the position of the
system displays a geographical spread.
8.2.4 Interpretations of spread measures
There is no high correlation between standard deviation and synoptic uncertainty. The standard deviation is sensitive to the geographical positions of gradients. Large standard deviations are therefore often associated with strong
gradients, whereas areas with weak gradients are likely to exhibit small standard
deviations. Two similarly looking forecast maps might display large differences if
they contain strong gradients, whereas two completely different maps with small
gradients will display small differences.
3.1
95
8The use of the Ensemble Prediction forecasts
A similar problem becomes important when plotting a certain isoline for
each of the members on a map, “spagetti diagrams”. It is a nice is way to summarize the information in a striking way. But spagetti diagrams are sensitive to the
gradients of the field. They easily show large “spread” in situations when the forecast is not uncertain, but the gradient weak, small spread when there are important
uncertainties in a strong zonal flow.
8.2.5 No strong correlation between spread and skill
There can be no 100% correlation between the spread and the forecast error.
Although low spread should imply that the control or ensemble mean forecasts will
be good, the opposite is not necessarily true. When the spread is large and the confidence in the forecast therefore should be low, there is still a chance that the control or the ensemble mean might verify. Large spread should therefore not be taken
as a reason not to issue a forecast. The best strategy is to issue a forecast based on
the ensemble mean or the dominant cluster(s), be careful in the formulations and
try to indicate possible alternatives as displayed by the clusters.
8.2.6 There is mostly something to be certain about
Even in cases with large spread and great uncertainties, there is often something to be certain about. The EPS might not be able to give confident information
if a blocking will be followed by a normal zonal flow or an outbreak of cold air.
Yet, anybody who is sensitive to warm and dry conditions can be given a very confident forecast that this will not occur.
It is also worth remembering that even if the forecast can be uncertain in
absolute terms, it can be quite accurate in relative. The actual temperature a week
or so ahead might be difficult to specify; but for many applications a confident
forecast of the trend is quite useful.
8.2.7 Different parameters have different spreads
Even in situation with synoptic high predictability in the large scale, there
might be uncertainties in a smaller scale. The uncertainty by 100 kilometres of the
passage of a small baroclinic wave with its associated warm and cold airmasses is
not normally taken into account by the clustering. However, this small scale uncertainty has the consequence that regions close to where the centre passes have a 5050% chance of being affected by the cold or warm air.
96
3.1
8The use of the Ensemble Prediction forecasts
The level of predictability might also vary between the weather parameters.
A low confidence in the temperature forecast does not exclude that the confidence
in the precipitation forecast might be high.
8.3 Probabilistic use of EPS
The EPS provides guidance for quantitative probabilistic forecasts of
weather parameters.
8.3.1 Probability maps
If all ensemble members are assumed equally likely, the probability of a
weather event is simply the proportion of EPS members forecasting this event.
From this set of distributions the probability of virtually any parameter, which are
forecast by the model, can be computed. Maps of such probability distributions
normally show great consistency from one forecast to the next.
When consulting the probability maps it is important to be aware of the time
interval; is it a instantaneous probability like the risk of winds more than 15 m/s at
00 or 12 UTC, or does the probability refer to more than 5 mm over 24 hours? A
10% probability of 15 m/s winds or more has quite different significance if the time
interval is 10 minutes, 12 hours or one day.
As mentioned earlier, the “tubing” does not provide any explicit probabailities. Synoptic experience suggest, however, that every “tube” has a 10% chance of
verifying, which leave the central cluster with a typical probability of 60-90% to
verify, depending on the number of “tubes”. See ch. 8.3.4 for more detail about
probability maps for longer time intervals
8.3.2 “Alarm bell” maps
To facilitate warnings of extreme weather a new experimental product, the
“alarm bell” map, has been developed. Based on the history of the last three years
of D+5 and D+10 ensemble forecasts (all at TL255 resolution) a climatology of the
model frequency distribution of temperature, precipitation amount and wind speed
at each grid point has been established as a function of the month of the year.
Each EPS run is compared with this climatology and a shift in the predicted
frequency distribution away from the climatological norm is used to indicate the
3.1
97
8The use of the Ensemble Prediction forecasts
forecast of extreme events. The assumptions is that what is an “extreme” event in
the models climate also should be an extreme event in the real atmosphere.
%
0
102
#
1000
70
50
60
$
10
30
1010
970
990
980
Wednesday 22 December 1999 12UTC EPS Forecast t+96 VT: Sunday 26 December 1999 12UTC
10m Wind Speed Extreme Forecast Index
60
0
98
97
0
50
60
99
0
10
20
98
0
99
0
!
10
00
ýþ
980
10
00
10
50
60
10
99
0
100
0
102
1010
0
1020
80
1020
102
ÿ
0
1020
50
1030
"
Figure 49 : An alarm bell map from the French storms 26 December 1999. Unusually strong winds
are forecast for northern and central France, which indeed turned out to be true. Also northeastern
Europe was pointed out but here the winds were only expected to reach 10 m/s, which is much more
than the normal of 2-3 m/s.
Empirical Distribution Functions 47.68N /4.11E
)
10−m wind forecast VT 26/12/1999 12 UTC
100
Probability not to exceed threshold
75
50
Climate
EPS forecast +72h EFI=84.2
EPS forecast +96h EFI=84.9
25
0
0.1
3.3
6.5
9.7
12.9
&
16.1
'
19.3
(
Threshold (10−m wind (m/s))
Figure 50 : An EDF diagram for Paris 26 December 1999 12 UTC. Wind speeds along the x-axis,
accumulated probabilities along the y-axis. The dashed curved to the left indicates the accumulated
probabilities of the climate, which for example tells that there is 50% probability to have more than
3.3 m/s. The curves to the right are two consecutive EPS forecasts which indicate that the risk of
more than 9.7 m/s increased from 40% in the D+4 from 22 December to 55% in the D+3 from 23
December. This should be compared with a climatological risk of a 1-2%. Note that the probabilities
refer to 12 UTC sharp; the forecast probabilities over 12 or 24 hours would necessarily be higher.
98
3.1
8The use of the Ensemble Prediction forecasts
8.3.3 Combined events
The EPS is also suitable to calculate probabilities of combined events like
less than 6/8 cloud cover and temperatures above 20 deg. Combinations of temperature and wind can define a “wind chill” index, temperature and humidity a “comfort index”, both examples of products that can be derived from the EPS output and
given probability formulations.
8.3.4 Probabilities over longer time intervals
The longer the time period over which the probabilities are calculated, the
more skilful they are. The confidence in the individual rain forecasts for days 5, 6
and 7 separately, is always lower than for the whole three day period.
2
Sunday 29 June 1997 12UTC ECMWF Forecast t+(120-240) VT: Wednesday 9 July 1997 12UTC
total precipitation probability > 25 mm
50
Sunday 29 June 1997 12UTC ECMWF Forecast t+(120-240) VT: Wednesday 9 July 1997 12UTC
total precipitation probability < 5 MM
3
50
50
1
/
+
30
*
50
0
87
81
50
.
,
50
-
Monday 30 June 1997 12UTC ECMWF Forecast t+(120-240) VT: Thursday 10 July 1997 12UTC
total precipitation probability > 25 mm
Tuesday 1 July 1997 12UTC ECMWF Forecast t+(120-240) VT: Friday 11 July 1997 12UTC
total precipitation probability > 25 mm
77
74
Figure 51 : 2-5 day probability maps: Probability of less than 5 mm during 5-9 July 1997 from the 610 day forecast 29 June 1997 (upper left), probability of more than 50 mm during 5-9 July from the
same forecast (upper right), the same for 6-10 July from the 30 June forecast (lower left) and for 7-11
July from the 1 July forecast (lower right). Central and eastern Europe became affected by very
heavy rain fall during the period 5-10 July 1997 (see fig.2 p.23)
Rain which over a short period of time may not pose any threat of severe
weather may give rise to flooding etc. if persisting over a sufficiently long period.
3.1
99
8The use of the Ensemble Prediction forecasts
8.3.5 The EPS meteogram
The ensemble information at one grid–point location may be displayed
through a probabilistic meteogram, which indicates the time evolution of a given
parameter for all ensemble members. The spread is indicated by the range of forecast values. Note the discrepancy between the TL511 temperature (full line) and
the ensemble. The reason for the difference is the coarse resolution in the
EPS Meteogram
60.0° N
22.5° E
Deterministic and Members Forecast Distribution 1 February 2001 12 UTC
B
Total Cloud Cover (okta)
8
7
6
5
4
3
2
1
0
D
Total Precipitation (mm/6hr)
8
7
6
5
4
3
2
1
0
10m Wind Speed (m/s)
20
18
16
14
12
10
8
6
4
2
0
C
5
2m Temperature Reduced to T511 Orography (deg C)
0
-5
-10
-15
-20
4
4
FRI SAT SUN MON TUE WED THU FRI SAT SUN
2
4
5
6
7
8
9
10
11
3
5
:
;
6
7
<
=
6
>
8
?
9
5
@
6
A
FEBRUARY 2001
max
75% quartile
median
25% quartile
min
TL255 CTRL
TL511 OPS
Figure 52 : EPS meteogram for Turku, southwestern Finland, 1 February 2001. The spikes indicate
the full range of the ensemble values, the rectangles the interval around the median (indicated by -)
of 50% of the ensemble values. The discrepancy between the ensemble values and the TL511 is due
to different resolution and the location along coastline with sharp temperature gradients.
100
3.1
8The use of the Ensemble Prediction forecasts
resolution in the TL255 model, previously mentioned in ch. 5.6. It leaves
islands and exposed coastal areas with 2 metre temperatures which in reality are
sea surface temperatures, or greatly influenced by sea surface temperatures. If values are interpolated the effect will spread even further into land.
]
Two meter temperature forecast T511 Thursday 1 February 2001 12 UTC+60h
I
M
W
-15
W
-9
-11
-13
-16
-20
-19
-19
-19
-8
-10
-12
-14
-15
-19
-19
-19
-20
W
X
-8
W
Y
W
W
W
V
W
W
W
-8
T
-19
-8
-10
-12
-16
-18
V
X
X
W
W
W
-19
-19
-20
-20
-8
-9
-11
-12
-14
-16
-19
-20
-20
-20
-20
-11
-10
-12
-14
-15
-17
-20
-20
-19
-16
-10
-20
-15
-12
-13
-10
-11
-13
-14
-15
-16
-16
-15
-14
-12
-16
-13
-12
-10
-9
-10
-11
-13
-13
-13
-14
-14
-14
-14
-14
-14
-14
-11
W
X
W
Y
W
W
W
W
W
W
W
W
W
-14
W
W
W
-12
-15
W
W
W
N
-16
W
W
W
W
W
Y
-12
W
-14
-19
-19
Y
W
W
W
W
0
L
W
W
W
W
-11
-11
-13
-14
-15
-8
-8
-9
-10
-10
-11
-15
-15
-8
-14
-18
-9
-12
-17
-10
-8
-8
-9
-10
-11
-14
-15
-7
-14
-17
-7
-12
-17
-7
W
Y
Y
X
X
X
W
Y
Y
X
W
W
Z
Z
Z
O
-6
-7
-7
-7
-7
-8
-8
-5
-7
-8
-7
-6
-7
-7
[
Z
Z
Z
P
-9
-10
-10
-12
-13
-15
-8
-8
-9
-11
-16
-16
-16
-17
-8
-17
-17
R
Z
\
Z
X
Z
W
W
W
W
W
Y
X
X
Z
Z
[
W
W
W
W
W
W
W
Y
X
X
Z
W
W
W
W
W
W
W
W
Y
X
X
W
W
W
W
W
W
W
W
W
W
W
W
W
W
W
W
-12
-7
-17
-9
-10
-15
-8
-12
-15
-9
W
-8
Z
W
-13
W
Z
-7
-14
-15
-7
Y
W
W
S
-9
-13
W
W
W
W
W
W
W
W
W
W
W
W
-15
W
W
W
V
V
V
W
W
W
K
-16
W
W
-19
W
V
J
W
W
-2
V
V
V
V
V
V
V
V
W
W
Q
W
-20
W
-16
W
-13
-20
W
-14
U
Z
-16
-14
-20
-19
-12
-7
Y
G
W
-19
W
V
V
-11
-9
W
-15
-19
-20
-20
V
W
W
W
W
W
-9
-16
-8
-20
-20
E
-16
H
F
-18
-21
-22
-12
W
V
V
W
]
-19
n
g
-1
f
2
-1
_
6
Two meter temperature forecast T255 Thursday 1 February 2001 12 UTC+60h
-12
-10
-12
-16
-22
-13
-9
-12
-16
-21
n
n
0
-20
n
n
o
o
n
n
-19
-19
-2
p
n
n
o
^
n
-19
-19
-21
o
n
n
c
d
-16
6
-1
e
-16
-14
n
-9
n
-15
-15
n
n
n
n
n
n
-15
-14
-13
-10
p
-16
a
b
-12
j
-16
-14
n
-8
n
h
q
k
-9
-11
-11
-7
-9
-10
-17
-18
-13
n
n
n
n
n
p
-12
m
-8
-8
-7
q
-7
r
r
-5
s
-6
t
-18
-18
-14
n
n
n
n
p
r
-8
-6
q
t
-9
-12
-17
-19
n
n
n
p
-12
i
-16
`
-8
l
Figure 53 : 2 metre temperature in a +60 h forecast in the TL511 model (above) and in the TL255
(below) from 1 February 2001 12 UTC from the same period as the epsogram above. Isotherms for
every second degree and forecast values for every Gaussian grid point. In the coarse resolution
model forecast for Eastern Sweden and southwestern Finland the temperature is 5-10 degrees
higher than in the high resolution due to the sharp thermal contrasts between land and sea.
3.1
101
8The use of the Ensemble Prediction forecasts
8.4 Statistical post–processing of EPS products
The output of the EPS represents an enormous quantity of forecast meteorological fields and an important task is to find methods to condense the information.
Doing so we must keep in mind that the advantage of condensing information has
to be paid by the risk of losing some information.
8.4.1 Calibration
The probabilities can be artificially improved statistically. If the verifications
show that the forecasts are over-confident (low probabilities verify too frequently,
high probabilities verify with lower frequency) a correction can be imposed which
will “upgrade” low probabilities and “downgrade” high probabilities. This kind of
calibration tends to decrease the range of forecast probabilities.
8.4.2 Statistical interpretation
Since the EPS products are the same as from a NWP model it can easily be
applied to any statistical post–processing like MOS, PPM or Kalman filtering. The
MOS or PPM equations are applied separately for each EPS member, after which
plumes, histograms or probability
charts can Kalman
be made. filter
2−dimensional
VOLKEL Before filtering 960201
20
observations
control
eps members
ensemble mean
15
Temperature (C)
10
5
0
−5
−10
−15
−20
1
u
2
v
w
3
4
x
5
6
7
Forecast range (days)
y
{
z
8
|
9
}
10
~
Figure 54 : The same as figure 25 but now with the verifying observations, showing a systematic
underestimation of the temperatures and not a very good description of the synoptic development.
102
3.1
8The use of the Ensemble Prediction forecasts
2−dimensional Kalman filter
VOLKEL After filtering 960201
20.0
15.0
Temperature (C)
10.0
observations
control
eps members
ensemble mean
5.0
0.0
−5.0
−10.0
−15.0
−20.0
1
2
3
4
5
6
7
Forecast range (days)
8
9
10
Figure 55 : By Kalman filtering the +24 h unperturbed forecasts assuming that the error depends
linearly on the forecast value, the system “learns” how to correct the forecasts from both the
unperturbed and perturbed members. Since the correction only aims at correcting for systematic
errors in the physical parametrization or geographical location, the same correction formula applies
irrespective if the forecasts are perturbed or not. After correction the EPS forecasts appear very
realistic and it becomes clear that much of the misfit between forecast and verification was not due to
the dynamics. Note that the kalman filtering has reduced the spread by correcting more for cold
temperatures than for warm.
8.4.3 Climatological weather type classification
It is possible to cluster on climatologically predefined flow patterns, where
each pattern also provides statistical information about the probability of weather
events, providing this pattern verifies. This is in particular valuable in mountainous
regions where there is low skill in the weather parameters.
The statistical values for each station in the area under different flow regime
conditions can be evaluated and thus provide a supplement for the probabilities
derived from the weather parameters. At a certain location, the probability for an
event then becomes the combination of the probability that the event will take
place provided the flow type will occur, multiplied with the probability, derived
from the EPS, that it will occur.
3.1
103
8The use of the Ensemble Prediction forecasts
8.5 What value can the forecaster add to the EPS?
As with deterministic forecasts, the usefulness of the EPS cannot be judged
only on the statistical value of the predicted parameters, but how it can guide the
forecaster into adding extra value. Since the EPS is rather new, we still lack sufficient experience to give detailed advice, but the following guidelines might be useful.
8.5.1 Systematic errors
The EPS has a small tendency to underestimate the atmospheric variability,
i.e. to identify all possible weather regimes that can occur in a given situation. This
can sometimes be seen when the deterministic TL511 provides a forecast that is not
covered by the ensemble. It is difficult to estimate how this should be interpreted,
but a tentative suggestion is that the TL511 should be regarded as likely as a handful members. It should not, unless there are strong reasons, be regarded as the
most likely solution. Remember that the TL511, for statistical reasons, should be
outside the ensemble around 4% of the time.
8.5.2 Non-systematic errors
There should, in principle, not be any inconsistent “jumps” in the EPS forecasts from one day to the other. But sometimes, when there is dynamic activity
over many regions on the Northern Hemisphere, it might not be enough with 50
analysis alternatives. It can in those cases happen that the perturbations one day are
more concentrated in one sensitive region than another, only to change the distribution slightly the next day. In such cases the forecaster is wise to consider both days’
ensemble output.
8.5.3 Spread and predictability
As mentioned earlier, for one and the same ensemble, some parameters can
display unusual high spread, whereas others can have quite small spread. It is
therefore misleading to judge the “predictability” only after one parameter, for
example the 500 hPa geopotential.
During a blocking event there can be a large spread in the wind, temperature
and pressure forecasts, but small in the precipitation. In a zonal regime, with small
spread in the upper air fields, the exact location and track of a baroclinic wave
might yield large spread in areas where the exact trajectory is uncertain.
104
3.1
8The use of the Ensemble Prediction forecasts
8.5.4 Interpreting probabilities
It is always assumed that just because the forecasters have no possibility to
modify the probability values coming out from the EPS (or some post-processing
with correction for systematic error or adjustment to local conditions) that they
cannot add extra value. There is a lot to add to the raw output:
-Which probability is relevant in a particular situation; more than 1 mm/24h
or more than 5 mm/24? Or more than 20 mm over 72h or the probability of winds
above 5 m/s and temperatures below +5 C?
-Why is the forecast uncertain? A 25% probability of more than 5 mm/24h
can be due to different uncertainties. It can mean that only 25% of the area will
have more than 5 mm, or it can be the uncertainty if an approaching frontal system
will reach the area?
A 25% risk forecast for temperatures below zero can in the same way mean
that the clouds in a cold air mass are difficult to forecast and consequently the temperature, or that arrival of cold air in connection with a possible change to meridional flow is uncertain. Probabilities of gale force winds can both be related to
variations within a broad zone of strong winds, or the uncertainty associated with
one specific baroclinic development.
8.5.5 Forecasts of extreme events
Extreme or anomalous events can be of mainly two types: large or medium
scale persistent anomalies like cold outbreaks or heat waves lasting for more than a
week, or small scale events with heavy rain or strong winds. The EPS is well
equipped to forecast the large scale and with increased higher resolutions, also the
smaller scales, responsible for many extreme weather events, have improved.
The cascading process for providing guidance on severe events, long as well
as small scale, proposed by WMO/CBS, aligns well with traditional forecast practises:
72 hours and earlier: Preliminary indicative guidance, based on probabilistic EPS
material;
24 to 72 hours in advance: more specific warning guidance based on a mixture of
probabilistic EPS and deterministic material
less than 24 hours: warnings issued by the responsible centre, based on detection and
tracking of the severe weather system;
3.1
105
8The use of the Ensemble Prediction forecasts
The forecaster is advised to consider deviating from the EPS in the rare event
of the TL511 operational model has during the last 2-3 days indicated a risk of a
severe event, which has not been included in the EPS. It should also be considered
when the EPS has forecasted a synoptic flow regime where the forecaster, from his
experience, knows that severe weather, not explicitly presented by the EPS, might
occur. This is in particular true if meteorological scales are involved which it is not
possible for a TL255 resolution to describe.
8.6 Some general recommendations for realtime use of EPS
There are at least two principle ways of working with the ensemble forecasts.
The most common is to start by inspecting the last days’ TL511 forecasts to
establish for how long into the forecast there is a reasonable consistency, and what
alternative developments are indicated after that. The last days’ EPS clusters are
examined to determine if the inconsistencies in the operational model are reflected
in the clusters, but also to determine if the EPS itself appears to be reasonably consistent. This will establish which is the most likely synoptic development, and the
main alternatives. When this is done the probability information is consulted in
order to establish if the weather parameter information for different locations, in
particular to establish if the spread in the weather parameter forecasts correspond
with the synoptic spread in the EPS clusters.
A more direct approach is to do the opposite: to start with the weather parameter information, both in the Epsograms and the probability maps, and then consult
the clusters and deterministic forecasts of the general atmospheric flow, to find the
synoptic background to the forecast variations in the weather and their probabilities. The advantage with this method is that when there are weak relations between
the spread in the synoptic pattern and the weather parameters the forecaster does
not necessarily have to spend time finding out which flow scenarios are more or
less likely.
106
3.1
9Epilogue
9 Epilogue
The ECMWF was set up in 1975 with the aim of providing 10 day forecasts
of economic value for the European area. The first target was to provide 5 day forecasts which had the same skill as 2 day forecasts before the “computer age”. This
has been achieved and the deterministic forecast now have a skill up to 8 days. The
skill varies considerably with sometimes useful forecasts up to 10 days, sometimes
hardly beyond 4days. The EPS provides a measure of when a deterministic forecast can be relied on and when not; in those cases the EPS provides a skilful estimation of the likely alternatives.
Used in this way the forecasts, either as an ensemble mean or in a probabilistic sense, already has useful skill up to day 10. The continued work at the ECMWF
is to develop this skill further. The resolution of the deterministic model will
increase to TL511, the ensemble system will be run on TL255 with more members,
perhaps twice a day. The use of satellite data will increase in quantity and quality.
The 4DVAR will increase its window from 12 hours, later perhaps 24 hours. The
consequences will not only be a continued increase in skill of large scale weather
systems, but also of small scale, in particular in the EPS.
This provides the meteorological services with an even more increased
potential to serve a wide range of needs in the society, since in particular the EPS is
suited for tailor suited forecast production. The challenge for today’s meteorologists is not only to make use of the current and future skill of the ECMWF forecasts, but also to develop new products and reach new sectors of society and satisfy
new demands.
This will unavoidably involve an increased proportion of automatic or computer to computer generated products. The best experts to do this work are meteorologists with good forecast experience, and with skill in computer based systems.
The design, maintenance and upgrade of computer based post-processing software
is already and will increasingly become an important task for meteorologically
skilled staff.
Forecasts generated in this way, perhaps with computer-to-computer access,
will free the forecasters from routine work and enable them to concentrate on situations where their personal intervention and interpretation is needed. To fulfil their
task as presenters of information, the forecasters must not only be familiar with the
way the atmosphere works, but also how the numerical prediction scheme functions works in theory and practise. Hopefully this User Guide has provided a useful
basis for this with respect to the ECMWF forecast system.
3.1
107
10References and further literature
10 References and further literature
10.1 ECMWF documentation and publications
10.1.1 Newsletter
A quarterly ECMWF Newsletter is distributed to national weather services in
the Member States and users of the GTS products worldwide. It deals with topics
in meteorology and the operational activities at the Centre and provides short
descriptions of operational changes to the analysis and forecasting system. The
newsletter also deals with computing topics.
A collection of important articles related to the development of the ECMWF
analysis and forecast system, together with relevant references, can be found in
ECMWF Data Services, 1999: ECMWF/WCRP Level III-A Global Atmospheric
Data Archive, The description of the evolution of the ECMWF forecasting system
and corresponding archive.
10.1.2 Bulletins and memoranda
Comprehensive documentation of the analysis and forecasting system, the
archiving and dissemination is given in the Meteorological Bulletins. The Computer Bulletins provide the guidance to the Centre’s computing facilities. Scientific
and technical aspects of the Centre’s work are discussed in informal ECMWF
Technical Memoranda. A limited distribution within the ECMWF Member States
applies to these three types of documentation. Individual copies are available from
the Centre’s library on request.
10.1.3 Proceedings and reports
Proceedings from the Centre’s annual seminar and workshops are distributed
widely to the national weather services and scientific institutions of the meteorological community.
ECMWF publishes reviewed papers of results in its own series of Technical
Reports, available in the libraries of most national weather services and scientific
institutions.
108
3.1
10References and further literature
10.1.4 Documentation
A documentation of the analysis and forecast model can be found in the
ECMWF Research Manuals:
Data assimilation - scientific documentation (Meteorological Bulletin
1.5/1)
Forecast model - adiabatic part (Meteorological Bulletin 1.6/3)
Forecast model - physical parametrization (Meteorological Bulletin
1.6/2)
10.2 User Guide references
10.2.1 Analysis system
Introductory note: The ECMWF implementation of four dimensional variational assimilation is covered by three papers (Rabier et al, 2000; Mahfouf et al, 2000 and Klinker et al, 2000)
Andersson, E. and H. Järvinen, 1999: Variational quality control, Q. J. R.
Meteorol. Soc.,1999, vol 125, pp. 697-722
Bouttier, F. and P. Courtier, 1998: Data assimilation concepts and methods.
ECMWF training course lecture notes, Mar 98, 64pp.
Courtier, P., J-N. Thépaut and A. Hollingsworth, 1994: A strategy for implementation of 4DVAR using an incremantal approach, QJRMS, vol, 120, pp.136788.
Bouttier F. and F. Rabier, 1998: The operational implemenation of 4DVAR,
ECMWF Newsletter Number 78, reprinted in ECMWF Data Services, pp.72-76.
Derber,J. and F.Bouttier, 1999; A reformulation of the background error covariance in the ECMWF global data assimilation system.Tellus 51A,195--221
Fisher, M. 1998: Development of a simplified Kalman filter. ECMWF Tech.
Memo. 260.
Gérard, E, and R. Saunders, 1999: 4D-Var assimilation of SSM/I total column water vapour in the ECMWF model. Q. J. Roy. Meteor. Soc.vol. 125,
pp.3077-3101.
3.1
109
10References and further literature
Järvinen, H., E. Andersson and F. Bouttier, 1999: Variational assimilation of
time sequences of surface observations with serially correlated errors, Tellus, 51A,
469-488)
Järvinen, H. and P. Undén, 1997: Observation screening and background
quality control in the ECMWF 3D-Var data assimilation system. ECMWF
Research department technical memorandum no.236.
Kelly, G., 1997: Influence of observations on the operational ECMWF system, ECMWF Newsletter Number 76, reprinted in ECMWF Data Services pp.6571.
Klinker, E., F.Rabier, G.Kelly and J.F. Mahfouf, 2000:The ECMWF operational implementation of four dimensional variational assimilation. Part III: Experimental results and diagnostics with operational configuration.Q. J. R. Meteorol.
Soc., vol. 126, pp.1191-1215.
Mahfouf, J. F. and F.Rabier, 2000: The ECMWF operational implementation
of four dimensional variational assimilation. Part II: Experimental results with
improved physics. Q. J. R. Meteorol. Soc., vol. 126, pp.1171-1190.
Persson, A, 2000: Synoptic-dynamic diagnosis of medium range weather
forecast systems, ECMWF Seminar on diagnosis of models and data assimiliation
systems, 6-10 September 1999.pp.123-137.
Rabier et al., 1997: Recent experimentation on 4D-Var and first results from
simplified Kalman filter. ECMWF Research department technical memorandum
no.240.
Rabier,F., H. Järvinen, E. Klinker, J-F. Mahfouf and A. Simmons, 2000: The
ECMWF operational implementation of four dimensional variational assimilation.
Part I: Experimental results with simplified physics.Q. J. R. Meteorol. Soc.
vol.119, pp.845-880,
Saunders R., E.Andersson, H.Järvinen, E. Gérard, M. Rohn and L.Isaksen,
1998: Recent improvements to the ECMWF 4D-Var data assimilation, ECMWF
Newsletter no 81, pp.2-7, reprinted in ECMWF Data Services, pp. 90-97.
Thépaut, J.-N., and P. Courtier, 1991: Four-dimensional variational data
assimilation using the adjoint of a multilevel primitive-equation model.
Q.J.Roy.Meteor.Soc., 117, 1225-1254.
110
3.1
10References and further literature
10.2.2 Forecast model
Beljaars, A.C.M., and A.A.M. Holtslag, 1991: Flux Parametrization over
land surfaces for atmospheric models. J.Appl.Meteor., 30, 327-341.
Beljaars, A. and P. Viterbo, 1993: A new surface/boundary layer formulation
at ECMWF, ECMWF Newsletter September 1993, reprinted in ECMWF Data
Services pp.31-41.
Beljaars, A. and P. Viterbo, 1998: The role of the boundary layer in a numerical weather prediction model, in: Clear and cloudy boundary layers,. A.M.M.
Holtslag and P.G.Duynkerke, Eds, pp. 287-403. Royal Netherlands Academy of
Arts and Sciences.
Beljaars, A., J-F. Mahfouf, J. Teixeira and P.Viterbo, 1996: Improvements to
the 2 m temperature forecast, ECMWF Newsletter Number 73, reprinted in
ECMWF Data Services pp.56-60.
Gregory, D., J-J. Morcrette, C.Jakob and A.Beljaars, 1998: Introduction of
revised parametrization of physical processes into the IFS, ECMWF Newsletter
Number 79, reprinted in ECMWF Data Services, pp.77-83.
Gregory, D., J.-J. Morcrette, C. Jakob, A. C. M. Beljaars, and T. Stockdale,
2000: Revision of convection, radiation and cloud schemes in the ECMWF Integrated Forecasting System. {\qj}, {•f 126}, 1685-1710.
Hortal, M., and A.J. Simmons, 1991: Use of reduced Gaussian grids in spectral models. Mon.Wea.Rev., 119, 1057-1074.
Jakob, C., and S.A. Klein, 1999: The role of vertically varying cloud fraction
in the parametrization of microphysical processes in the ECMWF model. Quart. J.
Roy. Meteor. Soc., 125A, 941-965.
Jakob, C., and S. A. Klein, 2000: A parametrization of the effects of cloud
and precipitation overlap for use in general-circulation models. {\qj}, {•f 126},
2525-2544.
Jakob, C., E. Andersson, A. Beljaars, R. Buizza, M. Fisher, E. Gérard, A.
Ghelli, P. Janssen, G. Kelly, A. P. McNally, M. Miller, A. Simmons, J. Teixeira,
and P. Viterbo: The IFS cycle CY21r4 made operational in October 1999. {\it
ECMWF Newsletter}, {•f 87}, 2-9.
3.1
111
10References and further literature
Lott, F., and M.J. Miller, 1997: A new sub-grid scale orographic drag parametrization: Its formulation and testing, Quart. Journ. Roy.Met.Soc. Vol.123,
pp.101-27.
Miller, M.J., T.N. Palmer, and R. Swinbank, 1989: Orographic gravity-wave
drag: its parametrization and influence in general circulation and numerical
weather prediction models. Meteor.Atmos.Phys., 40, 84-109.
Miller, M.J., A.C.M. Beljaars, and T.N. Palmer, 1992: The sensitivity of the
ECMWF model to the Parametrization of evaporation from the tropical oceans.
J.Climate, 5, 418-434.
Miller, M.J., 1993: The modelling of hydrological processes in the atmosphere. In: Modelling Oceanic Climate Interactions, Ed. J. Willebrand and D.L.T.
Anderson. NATO ASI Series I, Vol.11. Springer-Verlag, 1-33.
Miller M., M. Hortal and C.Jakob, 1995: A major operational forecast
change, ECMWF Newsletter Number 70, reprinted in ECMWF Data Services,
pp.42-49.
Morcrette, J.-J., 1991: Radiation and cloud radiative properties in the
ECMWF operational weather forecast model. J.Geophys.Res., 96D, 9121-9132.
Morcrette, J.-J., 1993: Revision of the clear-sky and cloud radiative properties in the ECMWF model. ECMWF Newsletter, 61, 3-14.
Ritchie, H., C. Temperton, A. Simmons, M. Hortal, T. Davies, D. Dent, and
M. Hamrud, 1995: Implementation of the semi-Lagrangian method in a high-resolution version of the ECMWF forecast model. Mon.Wea.Rev., 123, 489-514.
Tiedtke, M., 1989: A comprehensive mass flux scheme for cumulus parametrization in large-scale models. Mon.Wea.Rev., 117, 1779-1800.
Tiedtke, M., 1993: Representation of clouds in large-scale models Mon.
Wea. Rev., 121, 3040-3061.
Tiedtke, M., 1996: An extension of cloud-radiation parameterization in the
ECMWF model: The representation of sub-grid scale variations of optical depth.
Mon. Wea. Rev., 124, 745-750.
112
3.1
10References and further literature
Untch, A., A. Simmons et al., 1999: Increased stratospheric resolution in the
ECMWF forecasting system, ECMWF Newsletter Number 82, repirnted in
ECMWF Data Services pp. 98-105.
10.2.3 Ensemble prediction
Barkmeijer, J, R. Buizza and T.N. Palmer, 1999. 3D-Var Hessian singular
vectors and their potential use in the ECMWF Ensemble Prediction System. Q.
J.R. Meteorol. Soc., 125,2333-2351.
Buizza, R, and T.N.Palmer, 1995. The singular-vector structure of the
atmospheric generalcirculation. J. Atmos. Sci., 52, 9, 1434-1456.
Buizza, R., T. Petroliagis, T.N.Palmer, J.Barkmeijer, M.Hamrud, A.Hollingsworth, A.Simmons and N.Wedi, 1998. Impact of model resolution and ensemble
size on the performance of an ensemble prediction system. Q.J.R. Met. Soc. 124,
1935-1960.
Buizza, R, M.Miller and T.N.Palmer, 1999. Stochastic representation of
model uncertantiesin the ECMWF Ensemble Prediction System. Q. J. R. Meteorol
Soc., 125, 2887-2908.
Molteni, F, R. Buizza, T.N. Palmer and Petroliagis, T, 1996. The new
ECMWF ensemble prediction system: methodology and validation. Q. J. R. Meteorol. Soc., 122, 73-119.
Palmer, T.N., 2000: Predicting uncertainty in forecasts of weather and climate, Rep. Prog. Phys. 63, pp. 71-116.
Puri, K., J. Barkmeijer and T.N. Palmer, 1999: Ensemble prediction of tropical cyclones using targeted diabatic singular vectors. ECMWF, Technical Memorandum No 298.
10.2.4 Ocean wave modelling
Hasselmann S., K. Hasselmann, E. Bauer, P. Janssen, G.J. Komen, L. Bertotti, P. Lionello, A. Guillaume, V.C. Cardone, J.A. Greenwood, M. Reistad, L.
Zambresky and J.A. Ewing, 1988. The WAM model-a third generation ocean wave
prediction model, J. Phys. Oceanogr. 18, 1775-1810.
3.1
113
10References and further literature
Komen G.J. , L. Cavaleri, M. Donelan, K. Hasselmann, S. Hasselmann and P.
Janssen, 1994. Dynamics and modelling of ocean waves. Cambridge University
Press, 532p.
Janssen P., B. Hansen, and J.-R. Bidlot, 1997. Verification of the ECMWF
Wave Forecasting system against Buoy and Altimeter Data. Weather and Forecasting, 12, 763-784.
Janssen P., 1997: Operational implementation of the high resolution Ocean
Wave model, ECMWF Newsletter Number 74, reprinted in ECMWF Data Services
pp.61-64.
Janssen P. 1998: Progress with wind-wave interaction, ECMWF Newsletter
Number 80, reprinted in ECMWF Data Services, pp.84-89.
10.2.5 Use of products
Atger, F., 1999: The skill of ensemble prediction systems, Month. Wea. Rev.,
Vol. 127, pp. 1941-53.
Cattani, D., 1994: Application d’un filtre de Kalman pour adapter les températures à 2 mètres fournies par le modèle ECMWF aux stations météorologiques de
la Suisse. Arbeitsbericht der Schweizerischen Meteorologischen Anstalts, Zürich.
Glahn, H.R., Murphy, A.H., Wilson, L.J., Jensensius, J.S., 1991: Lectures
presented at the WMO Training Workshop on the Interpretation of NWP Products
in terms of Local Weather Phenomena and their Verification. WMO Programme on
Short and Medium-Range Weather Prediction Research, PSMP Report Series No.
34, WMO/TF no. 421.
Murphy, A., and R.W.Katz (eds), 1985: Probability, statistics and decision
making in atmospheric sciences. Westview Press.
Persson, A., 1991: Kalman filtering - a new approach to adaptive statistical
interpretation of numerical meteorological forecasts. Lecture presented at the
WMO Training Workshop on the Interpretation of NWP Products, Wageningen,
The Netherlands, 29 July-9 August 1991. WMO/TD. No. 421.
Persson, A. and B. Strauss, 1995:On the skill and consistency in medium
range weather forecasting, ECMWF Newsletter, No 70, Summer 1995, p.12-15..
114
3.1
10References and further literature
WMO, 1992: Methods of interpreting numerical weather prediction output
for aeronautical meteorology. Technical note No. 19
3.1
115