1
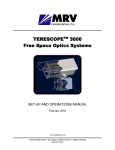
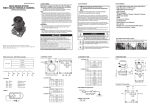
Motion Control SMD 703 24~60V, 0.75~3.6A Microstepping Driver SMD 707 24~60V, 1.5~7A Microstepping Driver USER’S MANUAL REVISION 1.0 – 2001 No part of this manual may be reproduced without permission. CyberResearch, Inc. www.cyberresearch.com 25 Business Park Drive, Branford, CT 06405 USA 203-483-8815 (9am to 5pm EST) FAX: 203-483-9024 ©1994 CBI ©1997 CyberResearch, Inc. ©Copyright 2001 CyberResearch, Inc. All Rights Reserved. Revision 1: 2001 The information in this document is subject to change without prior notice in order to improve reliability, design, and function and does not represent a commitment on the part of CyberResearch, Inc. In no event will CyberResearch, Inc. be liable for direct, indirect, special, incidental, or consequential damages arising out of the use of or inability to use the product or documentation, even if advised of the possibility of such damages. This document contains proprietary information protected by copyright. All rights are reserved. No part of this manual may be reproduced by any mechanical, electronic, or other means in any form without prior written permission of CyberResearch, Inc. TRADEMARKS “CyberResearch,” “SMD 703,” and “SMD 707” are trademarks of CyberResearch, Inc. Other product names mentioned herein are used for identification purposes only and may be trademarks and/or registered trademarks of their respective companies. • NOTICE • CyberResearch, Inc. does not authorize any CyberResearch product for use in life support systems, medical equipment, and/or medical devices without the written approval of the President of CyberResearch, Inc. Life support devices and systems are devices or systems which are intended for surgical implantation into the body, or to support or sustain life and whose failure to perform can be reasonably expected to result in injury. Other medical equipment includes devices used for monitoring, data acquisition, modification, or notification purposes in relation to to life support, life sustaining, or vital statistic recording. CyberResearch products are not designed with the components required, are not subject to the testing required, and are not submitted to the certification required to ensure a level of reliability appropriate for the treatment and diagnosis of humans. CONTENTS General Description.......................................................1 Connector Description...................................................3 Power Supply Requirements .......................................3 Fuse............................................................................3 Motor Output..............................................................4 Motor Wiring...............................................................5 Series Wired................................................................5 Parallel Wired .............................................................5 Motor Wire Color Codes ..............................................6 Noise Precautions .......................................................7 Direction and Step Inputs...........................................7 Current Set.................................................................8 Default Current ..........................................................9 Standby Implementation ............................................9 Microstepping ................................................................11 Factors Affecting Microstep Accuracy ............................12 Motor Accuracy...........................................................12 Motor Linearity ...........................................................12 Motor Load .................................................................13 Anti-Resonance Circuit..................................................13 Disadvantages ............................................................15 Performance Considerations..........................................16 Torque and Power vs. Speed .......................................16 Factors Affecting Power and Torque............................17 Power Supply Voltage .................................................17 Series vs. Parallel Operation .......................................18 Torque ........................................................................19 Power Supply Current ................................................20 Heating Considerations ..............................................21 Motor Speed-Torque and Speed Power Curves ..............22 Specifications ................................................................30 GENERAL DESCRIPTION: CyberResearch's's SMD 703 and SMD 707 are step motor drives whose major features are microstepping and anti-resonance circuitry. These compensate for low speed vibration and mid-band instability respectively. The SMD 707 is designed to run unipolar hybrid PM step motors with current ratings from .75 to 7 amps per phase; the SMD 703 is designed to work with motors rated at 1.5 to 14 amps per phase. The control interface for these drives is opto-isolated for maximum noise immunity. The inputs are directly compatible with TTL drivers and do not require additional components. The drives require a single voltage, unregulated DC power supply between 24 VDC and 60 VDC. The power supply current requirements are very modest. For 6 wire step motors wired in the series configuration, the power supply current is approximately 1/3 of the motor's rated per phase current. A high efficiency switching 'H' bridge output utilizes power MOSFETS to keep heating to a minimum. Under most conditions the drives will not require heat sinking. It is sufficient to bolt them down to a metal chassis in the user's system. The drives are small; measuring 4" x 4.5" x .8" and weighing only 1.2 lb. They come encapsulated in a heat conductive epoxy and encased in an anodized aluminum outer cover. The result is a compact environmentally rugged package that resists abuse that would destroy most other controls. -1- WARNER SM-200-0125-BC 200 175 150 125 100 TORQUE (OZ/IN) 75 0K 1K 2K 3K 4K 81 73 71 67 60 0 16 31 45 53 5K 6K 7K 8K 9K 10K 65 69 66 67 67 68 72 92 106 126 133 152 50 25 POWER (WATTS) 1K 2K 200 175 150 3K 4K 5K 6K FULL STEPS PER SECOND 7K 8K MAE MY200-2240-460A8 TORQUE (OZ/IN) 125 100 10K 9K 0K 1K 2K 3K 4K 5K 6K 145 144 138 139 124 113 99 0 31 61 92 109 125 132 7K 8K 9K 10K 86 74 67 59 134 132 133 131 75 50 POWER (WATTS) 25 1K 2K 3K 4K 5K 6K FULL STEPS PER SECOND 7K 8K 9K CyberResearch's SMD 703 MICROSTEP DRIVE (Actual Size) -2- 10K CONNECTOR DESCRIPTION: TERMINAL 1,2 POWER SUPPLY Terminal 1 (internally connected to Terminal 12) is the power supply return or ground connection. Terminal 2 is the positive power supply input connection. The power supply voltage range is from 24 VDC to 60 VDC. The power supply need not be regulated; however if an unregulated power supply is used, care must be taken to insure that the power supply ripple and line voltage tolerance do not exceed this specified supply voltage range. The recommended power supply ripple voltage is 1 volt peak to peak or less for best performance. Power supply current may be estimated for a 6 wire motor as 1/3 of the motor's per phase current rating for series operation (fig. 3). For parallel operation (fig. 4), use 2/3 of motor's per phase current rating for estimating supply current. At light loads and medium speeds considerably less current is needed. See 'PERFORMANCE CONSIDERATIONS' (page 16) for more information about the selection of an appropriate power supply voltage and motor operating mode. WARNING! ALWAYS DISCONNECT POWER TO THE DRIVE BEFORE EITHER CONNECTING OR DISCONNECTING ANY MOTOR LEADS. FAILURE TO DO THIS WILL RESULT IN IRREPARABLE DAMAGE TO THE DRIVE. During rapid deceleration of large inertial loads, step motors generate considerable power. This power is returned to the power supply by the step motor drive. Usually the filter capacitor in the power supply is sufficient to absorb this power safely and keep the voltage rise to acceptable limits. If the power supply cannot absorb this power, the voltage generated may exceed the 60 VDC limit of the drive. Damage may result to the control, power supply, or both. In this rare instance, an external voltage clamp, such as a 68 volt zener diode, is recommended as protection. For protection against motor to ground shorts, power supply voltage reversal and other anomalies, use a 5 AMP fuse from the power supply to TERMINAL 2. EXAMPLE: Design an unregulated power supply for use with a SUPERIOR ELECTRIC M092 FD04. Series operation at 35 VDC will be used. -3- D 1-4 +VDC T1 115 V C1 Figure 1 1. The M092 FD04 has a current rating of 4 Amps per phase. Because series operation is to be used, power supply current will not exceed: Isupply = IM/3 = 4/3 = 1.33 AMPS 2. For a ripple voltage of 1 volt or less, the minimum capacitor (C1) size is: C1 = Isupply x 8333 = 1.33 x 8333 = 11,000 MFD 3. The transformer (T1) secondary voltage is going to be: VRMS = Vsupply x .7071 = 35 x .7071 = 25 VAC The secondary current rating should be at least 1.5 AMPS. TERMINAL 3,4,5,6 MOTOR OUTPUT One motor winding connects to terminals 3 and 4, while the other winding connects to terminals 5 and 6. The step motor drive will operate 4,6 and 8 wire motors. The 6 and 8 wire motors may be wired in either a series or parallel configuration. For 8 wire motors, follow the manufacturer's hook-up diagrams for series or parallel operation. WARNING! BEFORE EITHER CONNECTING OR DISCONNECTING ANY MOTOR LEADS, ALWAYS DISCONNECT THE POWER FIRST.IF THIS IS NOT DONE, THE DRIVE WILL BE PERMANENTLY DAMAGED. The most common step motor has 6 lead wires, which connect to a pair of center-tapped windings. A typical 6 wire motor is shown below (fig. 2). The SUPERIOR ELECTRIC color code is used in this example. -4- RED BLACK RED/WHT GREEN WHITE GRN/WHT Figure 2 SERIES WIRED RED (Pin 5) NC RED/WHT (Pin 6) NC GRN/WHT (Pin 3) GREEN (Pin 4) Figure 3 PARALLEL WIRED RED (Pin 5) BLACK (Pin 6) NC NC GREEN (Pin 4) WHITE (Pin 3) Figure 4 -5- Parallel wired step motors have twice the peak shaft power as series wired step motors. Parallel wired step motors also have more that twice as much heat dissipation as do series wired motors. For a more thorough discussion see the 'PERFORMANCE CONSIDERATIONS' section starting on page 16. When using the series configuration, select the appropriate current set resistor from the CURRENT SET RESISTOR TABLE. When using the parallel configuration, or a 4 wire motor, make the selection from the 'PARALLEL' column. The proper motor wire color code to drive connector hook-up for series and parallel operation is shown in the tables below. This hook-up will yield clockwise motor rotation when the DIRECTION input is at a logical '0'. TABLE 1 SERIES WIRED Manufacturer T3 T4 T5 Superior Electric Rapidsyn Imc Sigma Oriental Motor Portescap Bodine Digital Motor Warner Japan Servo Grn/Wht Grn/Wht Grn/Wht Yellow Blue Yel/Wht Yellow Yellow Red Yellow TABLE 2 Manufacturer Superior Electric Rapidsyn Imc Sigma Oriental Motor Portescap Bodine Digital Motor Warner Japan Servo T3 Green Green Green Red Red Red Red Red Yellow Green Red Red Red Black Black Org/wht Brown Black Orange Blue PARALLEL WIRED T4 T5 White White White Red/Yel Blue Yel/Wht Red/Wht Red/Wht Red White -6- Green Green Green Red White Red Red Red White Green Red Red Red Org/Blk Yellow Org/wht Org/wht Black Orange Blue T6 Red/Wht Red/Wht Red/Wht Orange Green Brown Orange Orange Brown Red T6 Black Black Black Orange Green Brown Orange Blk/Wht Black White Under some conditions the unused wires may have voltages in excess of 120 volts. Consequently all motor wires not used should be insulated and not allowed to touch anything. The SMD 703/707 are high frequency switching type drives. Because of the power involved and the rapid rate of current and voltage change inherent in this type of control, considerable RFI is generated. The following precautions must be taken to prevent this noise from coupling back to the inputs and causing erratic operation. 1. Never bundle the motor leads in the same cable as the STEP and DIRECTION input leads. 2. Always keep power supply leads as short as possible. If this is impractical, use .1 µF and 100 µF capacitors directly across TERMINALS 1 and 2 at the step motor drive. 3. Never wire capacitors, inductors or any other components to the motor output terminals. 4. Always ground the chassis that the step motor drive is mounted on. 5. Always ground the motor case. 6. Never use op amps, optocouplers or other slow transitioning devices to drive the STEP input. Keep the logic transitions to 200 nSec. or less. TERMINAL 7 NO CONNECTION (SMD 703/707) On the SMD 703/707 microstep drives this terminal is reserved for future use. Do not connect. TERMINAL 8,9,10 DIRECTION AND STEP INPUTS Terminal 8 is 'DIRECTION' input. A low level on this terminal will result in a clockwise microstep when the 'STEP' input is pulsed on a SMD 703 or SMD 707 microstep drive. Terminal 9 is the 'STEP' input. A step occurs on the high to low transition of the 'STEP' input, the direction being set by the level on the 'DIRECTION' input at that moment. Terminal 10 is the '+5 VOLT' common to terminal 8 and 9. -7- The DIRECTION and STEP inputs are optically isolated from the rest of the step motor drive circuitry. The isolated inputs are intended to be driven directly by standard TTL or open collector outputs. Because TTL is current sink logic, the driver 5 VDC power supply must be connected to terminal 10, '+5 VOLT'. Both the DIRECTION and STEP inputs require 16 mA current sink capability. The logic transition time for the STEP input must be 200 nanoseconds or less. The minimum pulse width for the STEP input is 1 microsecond. The maximum pulse rate is 1 Mhz when a 50% duty cycle square wave is used. TERMINAL 11,12 CURRENT SET The primary function of the CURRENT SET terminal is to set the magnitude of the motor phase currents. This is done by connecting a 1/4 watt resistor between terminals 11 and 12. The correct resistor value in ohms is chosen from the tables below. For convenience the appropriate table is also printed on the face of the step motor drive. If a 6 wire motor is to be series connected, use the first column, otherwise use the second column for parallel connected motors. Match the motor's per phase current to the closest listed table entry, then pick the resistor associated with that current. TABLE 3 SMD 707 CURRENT SET RESISTOR TABLE SERIES PARALLEL RESISTOR 1.5A 2.0A 2.5A 3.0A 3.5A 4.0A 4.5A 5.0A 5.5A 6.0A 6.5A 7.0A .75A 1.00A 1.25A 1.50A 1.75A 2.00A 2.25A 2.50A 2.75A 3.00A 3.25A 3.50A 12K 15K 27K 33K 47K 68K 82K 120K 180K 270K 560K 3.3M -8- TABLE 4 SMD 703 CURRENT SET RESISTOR TABLE SERIES PARALLEL RESISTOR 3.0A 4.0A 5.0A 6.0A 7.0A 8.0A 9.0A 10.0A 11.0A 12.0A 13.0A 14.0A 1.5A 2.0A 2.5A 3.0A 3.5A 4.0A 4.5A 5.0A 5.5A 6.0A 6.5A 7.0A 12K 15K 27K 33K 47K 68K 82K 120K 180K 270K 560K 3.3M CAUTION: Without a current set resistor present, the SMD 707 and the SMD 703 default to 3.6 amp and 7.2 amp drive currents respectively. If these current levels are in excess of a motor's rated per phase current, they may damage the motor. For good low-speed smoothness with the SMD 703/707, the motor set current should not vary more than ±20% from the nominal value. This is because accurate microstep spacing occurs over a narrow range of currents. Currents substantially above or below this range may reduce microstep positioning accuracy and increase low speed vibration. The CURRENT SET terminal has a secondary function. One optional use for the CURRENT SET input is to set a lower standby current while the motor is stopped, or shut off motor current altogether. A standby current can be set by switching another resistor in parallel with the current set resistor. The standby current will be equivalent to the resulting parallel wired resistor. If the current set resistor is shorted out, motor current goes to zero, and the motor is freewheeling. Fig. 5 shows how an optically isolated standby torque and freewheeling functions may be implemented. -9- STAND BY + 5 VD C C UR RE N T SET R ES I S TO R 4N28 TTL 220 TTL 220 4N28 ' 0 ' = RU N ' 1 ' = S TA ND B Y ' 0' = ON ' 1 ' = R ES E T Figure 5 WARNING! NEVER CONNECT OR DISCONNECT ANY OF THE MOTOR LEADS WITHOUT FIRST DISCONNECTING THE POWER. IF POWER IS NOT TURNED OFF BEFORE ATTACHING OR REMOVING THE MOTOR WIRES, THE DRIVE WILL BE DAMAGED BEYOND REPAIR. - 10 - 11 12 MICROSTEPPING: Microstepping is a technique that electronically multiplies the number of steps a motor takes per revolution. This is useful because it increases motor angular resolution and decreases motor vibration. The multiplier is 10 for the SMD 707 and the SMD 703. Thus a 200 step per revolution motor, when driven by this control, will take 2000 steps to complete one revolution. Microstepping is accomplished by driving the motor windings with sine and cosine weighted currents. A 90 degree electrical angle change in these currents results in a mechanical angle change of 1.8 degrees in a 200 step motor, or one full step. The number of microsteps per step is determined by the number of sine and cosine values stored for a span of 90 degrees. In the SMD 703/707, values are stored for every 9 electrical degrees for a total of 10 for the 90 degree span. A counter in the SMD 703/707 addresses a look-up table that contains pre-calculated sine and cosine values. These values are multiplied by a value proportional to the motor's rated current (determined by the current set resistor). The results are converted to phase currents and applied to the motor. The STEP input, in conjunction with the DIRECTION input, increments or decrements this counter, which then selects the next look-up table entry. Low speed vibration results from the start-stop or incremental motion of the motor. This generates periodic acceleration and deceleration reaction torques at the step rate. When the step rate matches, or is a sub-harmonic of the mechanical resonant frequency of the motor, the vibrations become particularly severe. Microstepping decreases the magnitude of each step ten-fold, with a commensurate decrease in vibration. Vibration is further reduced because at any given speed the microstep rate is 10 times higher than the equivalent full step rate. One apparent benefit of microstepping is an increase in the number of resolvable angular positions. However, there are a number of factors which limit its achievable open-loop accuracy. - 11 - FACTORS AFFECTING MICROSTEP ACCURACY MOTOR ACCURACY: Most step motors are specified as having a ± 5% nonaccumulative step tolerance. This implies that a 200 step per revolution motor will have an absolute accuracy of 1 part out of 2000. If the motor were run open-loop (as most step motors are) only a ten-fold increase in accurately resolvable locations can be expected. Consequently a 125 microstep drive cannot position a motor any more accurately than a 10 microstep drive, such as the SMD 703/707, in an open-loop configuration. MOTOR LINEARITY: For every motor there is a function that relates the angle of rotation to the electrical angle of the winding currents. If it were directly proportional, then sine and cosine varying currents would cause a uniform rate of rotation. Alternately this would result in uniformly spaced microsteps. - 90 O E LE C T RIC AL A NG L E +9 0 O For most motors this function is 'S' shaped to a greater or lesser degree (fig. 6). The motor current profiles must be distorted from their ideal sine-cosine profiles to compensate for this nonlinearity. How well this compensates for the motor's non-linearity will determine the microstep placement accuracy of the control. - 1 .8 O 0 M ECH AN ICA L AN GL E Figure 6 - 12 - + 1 .8 O The electrical to mechanical angle function is dependent on motor current. By varying the current set resistor value, it may be possible to trim out any residual positional error. Should this be insufficient. MOTOR LOAD: A step motor only generates torque when a rotor error angle exists. The relationship between rotor displacement angle and restoring torque for a typical motor is shown in fig. 7. -3 00 TOR QU E (O Z-I N) +3 00 The function that relates error angle to torque is approximately sinusoidal, so an error angle equal to one microstep occurs with torque load of only 16% of holding torque. Generally speaking, motor load is the single most significant contributor to microstep positioning error. If the load is transient or due to acceleration, the rotor error will decrease to a residual level upon removal of that transient. -1. 8 O 0 + 1. 8 O ME C HA NI CA L A NG LE Figure 7 ANTI-RESONANCE CIRCUIT: Most step motors are prone to parametric instability or resonance when rotating between 4 to 15 revolutions per second. Variously called midband instability, resonance or other terms, it manifests itself as a torsional oscillation of 50 to 150 Hz when the motor is running in this speed range. The torsional oscillation has a tendency to increase in amplitude with time until it reaches a peak equal to the step angle. When this happens, the motor loses synchronization and stops. - 13 - Generally the amplitude build-up takes from tens to hundreds of cycles to reach this level, so up to several seconds may elapse from the start of the oscillation until the motor stops. This time is sufficiently long to permit the motor to accelerate through this speed band, however continuous operation in this range is not possible. Above and below this range of speeds, the oscillation amplitude may not be sufficient to stop the motor but it is still present. Fig. 8 shows the parametric resonance frequency versus motor step rate for three unrelated step motors. In all three cases resonance breaks out at 5 to 7 revolutions per second and is most severe at the higher torsional frequencies (lowest step rates). S U PER IO R M0 62 -F D04 RE S ONA N T FR E QUE NC Y 150Hz RA PI DS Y N 34 D -9 2 08 A 100Hz 50Hz SI GM A 2 0 -2 23 50 - 281 75 5K H z 10KHz 1 .8 D E GRE E S TE P R AT E Figure 8 Because any torsional oscillation implies acceleration and deceleration of a mass, torque that otherwise would have been available for useful work is wasted to sustain this oscillation. Both the SMD 703 and the SMD 707 incorporate a midband anti-resonance compensation circuit that closes the loop on this instability and electronically damps it out. Since the motor is now unable to sustain oscillation, torque previously wasted is now available. - 14 - With anti-resonance the motor may be run continuously at speeds where de-synchronization would otherwise occur. The motor no longer exhibits 'forbidden' continuous-operation speed bands and there is more torque available outside these speed ranges as well. The operation of the anti-resonance circuit in most applications is transparent to the user, in the sense that no special provisions have to be taken to accommodate it. There are three instances where it may be disadvantageous: 1. VERY HIGH SPEED The anti-resonance circuit limits the maximum speed to 30,000 full steps per second (300,000 pulses per second). Should it be necessary to run the motor faster than that, up to 100,000 full steps per second, a special "anti-resonance disabled" version of the step motor drive can be ordered (a SUPERIOR ELECTRIC ME61-8001 will exceed 100,000 full step per second or 30,000 RPM). 2. VERY LARGE INERTIAL LOAD Microstepping permits reliable operation with inertial loads in excess of 100 times the motor's moment of inertia. However a very large inertial load so lowers the mechanical resonant frequency that the anti-resonance circuit may cause oscillation. It may be better to order the drive without the circuit since resonance usually is not a problem with moderate to large inertial loads anyway. 3. IRREGULAR PULSE TRAIN To operate properly, the anti-resonance circuit cannot tolorate more than a 15% variation in the pulse period at the STEP input. Any variation in excess of this limit may result in missed steps. There are some digital pulse sources that have more than a 15% period to period variation. To use these sources without error the "anti-resonance disabled" version of the step motor drive should be ordered. - 15 - PERFORMANCE CONSIDERATIONS This section will deal with factors that affect motor performance and the interactions between these factors. This should permit the designer to achieve the optimum balance of performance trade-offs. The factors considered will be: TORQUE OUTPUT POWER POWER SUPPLY VOLTAGE SERIES vs. PARALLEL OPERATION POWER SUPPLY CURRENT MOTOR HEATING MOTOR DRIVE HEATING TORQUE AND POWER vs. SPEED: Step motor performance curves exhibit two distinct regions with respect to speed. In region 1 (fig. 9), motor torque is constant with speed while motor shaft power is proportional to speed. In region 2, motor torque decreases as the inverse of the speed while motor shaft power remains constant. 400 350 REGION 1 REGION 2 300 TORQUE (OZ/IN) TORQUE 250 200 150 POWER 100 POWER (WATTS) 50 0 1K 2K 3K 4K 5K 6K 7K FULL STEPS PER SECOND Figure 9 - 16 - 8K 9K 10K In region 1 the motor torque is held constant by controlling the magnitude of the motor phase current. The step rate in this region is sufficiently low to permit motor current to reach the programmed value. Above a certain speed, the motor torque begins to drop off as the inverse of the speed. Motor winding inductance limits the rate of current rise, and as speed increases, progressively less current can be forced into the windings. Because motor torque is proportional to phase current, and in region 2 current is proportional to the step period, torque decreases as the inverse of the step rate. Because power is the product of speed and torque, power remains constant with speed in region 2 in a loss-less step motor. There are speed related power losses in the motor ( i.e. friction, magnetic losses, windage and other losses ) that result in a shallow slope to the power curve. Where this slope intersects the speed axis is the maximum speed at which the motor will run. CAUTION: The SMD 703/707 drive is capable of running step motors at speeds high enough to cause damage to motor bearings. FACTORS AFFECTING POWER AND TORQUE POWER SUPPLY VOLTAGE: The choice of power supply voltage affects the power a step motor generates in region 2. The speed to which constant torque is maintained is proportional to power supply voltage. Consequently maximum motor shaft power is also proportional to the power supply voltage. The step motor drive has a power supply range from 24 to 60 VDC. This results in a motor power range of 2.5:1. Increasing power supply voltage increases motor heating. Taking this into consideration, the choice of power supply voltage should be just high enough to meet the application's power requirements and no higher. - 17 - SERIES vs. PARALLEL OPERATION: The customer has the option of wiring 6 and 8 wire motors in either series or parallel configuration. Parallel operation doubles the maximum motor power output over what can be obtained with series operation. The speed to which constant torque is maintained is also doubled. This performance improvement comes at the expense of greater motor and control heating. Series operation is preferred for low speed (region 1) operation, and suitable in region 2 if the available power is sufficient. Series operation benefits are low motor and control heating and modest power supply current requirements. Using the power supply voltage range in conjunction with either series or parallel operation permits a 5:1 range in maximum motor power. Fig. 10 illustrates the effects of series vs. parallel operation at low and high power supply voltages on motor performance. Note that series operation at 54 VDC supply voltage yields performance virtually identical to parallel operation at 27 VDC supply voltage. 200 175 150 TOR Q U E ( O Z /I N ) 125 T 1 ,P 1 T 2 ,P 2 T 3 ,P 3 T 4 ,P 4 T1 T2 T3 = = = = 27 54 27 54 vo lts, vo lts, vo lts, vo lts, f u ll - w i n d in g f u ll - w i n d in g h a l f - w in d i n g h a l f - w in d i n g T4 P4 (105W) 100 75 P 2 (53 W ) 50 P OW E R ( W AT T S ) P3 ( 50W) 25 P 1 ( 25 W) 1K 2K 3K 4K 5K 6K 7K FU LL STEPS PER SECO ND Figure 10 - 18 - 8K 9K 10K TORQUE: The current set resistor determines the motor torque in region 1. Motor torque is approximately proportional to motor current times the number of winding turns that carry the current. In series operation, twice the number of turns carry current as do in parallel operation, so only half the current is needed to generate a given level of torque. Unfortunately series operation quadruples the effective winding inductance. In region 2, motor power is proportional to the inverse of the square root of the winding inductance. Fig. 11 illustrates the effect of various winding currents on motor performance. A 4 Amp per phase motor was driven from 1 to 6 Amps per phase in 1 Amp increments. In region 1 motor torque is nearly proportional to motor current. Torque remains constant until it intersects the motor's load line, which may be approximated as: T = kV / f L T = torque k = motor constant f = steps per second L = motor inductance V = power supply voltage The intersection of the constant torque line and the motor load line marks the beginning of region 2. Above this speed motor torque is not dependent on the current set resistor. - 19 - 400 350 ( 6 A /P HAS E ) 300 ( 5 A/ PHA SE ) TO RQU E ( OZ /IN ) 250 ( 4 A /P HA SE ) ( 3 A /P HA SE ) ( 2 A/P HA SE ) 200 (1 A /PHA S E) 150 100 POW ER (WAT T S) 50 1K 2K 3K 4K 5K 6K 7K 8K FULL STEP S PER SECO N D 9K 10K SUPERIOR ELECTRIC M092-FD08 4A 3V Figure 11 Note that if the motor in fig. 11 is operated in excess of 4000 steps/sec. it would make no performance difference what the current set was. What would be significant would be the greatly reduced motor and control heating at low speed at the lower current setting. POWER SUPPLY CURRENT: Power supply current depends on the current set resistor value, the speed the motor is running and the load applied to the motor. Generally speaking, the power supply current for a 6 wire motor in the series configuration will not exceed 1/3 the motor's rated per phase current. A parallel configured motor will require no more than 2/3 the rated per phase current. - 20 - Fig. 12 is representative of a parallel configured motor's power supply current requirements vs. speed. The solid curve is for an unloaded motor while the dotted curve is for a fully loaded motor. SUPERIOR M062-FD04 SMD 707 PARALLEL WIRED 27V POWER SUPPLY CURRENT 1.5A 1.0A 0.5A 0 10K 20K FULL STEPS PER SECOND Figure 12 MOTOR AND CONTROL HEATING: Motor and control heating is equivalent to the difference between the electrical power input and the motor's mechanical power output. The ratio of the power out vs. power in is the system efficiency. The power losses are dependent on motor speed, load and winding configuration, the power supply voltage, current set and other factors. The power losses in the step motor drive are primarily resistive and therefore relatively easy to calculate. Each channel of the drive may be considered to be equivalent to a .55 ohm resistor. WARNING! THE DRIVE MUST HAVE SUFFICIENT HEAT SINKING TO KEEP THE CASE TEMPERATURE BELOW +75 DEGREES C (+167 DEGREES F) OR PERMANENT DAMAGE WILL RESULT. - 21 - Step motor drive dissipation in region 1 is always considerably higher than in region 2. In region 1, motor phase currents, and therefore drive channel currents are sinusoidal. The peak amplitude is equal to the rated per phase current in the parallel mode and half of that in the series mode. In region 1, power dissipation is approximately: W = .55 (Iφ)2 W = .55 (Iφ/2)2 for parallel wired motors for series wired motors Note that the power dissipation is 4 times higher for the parallel connection. In region 2 power dissipation can be calculated as: W = 1.1 (Iφ/3)2 W = 1.1 (Iφ/6)2 for parallel wired motors for series wired motors Region 1 power dissipation is 4.5 times greater than region 2 power dissipation. If the motor will spend most of its time stopped or in region 1, use region 1 power dissipation equations to evaluate the needs for heat sinking. Alternately, consider reducing motor set current while the motor is stopped to reduce power dissipation. As a practical guide, heat sinking will almost certainly be required if the drive is set to 3 amps or more. Generally, if the unit is too hot to touch, it needs additional cooling. The case temperature should never under any circumstance, be allowed to exceed +75 degrees C (+167 degrees F), since this will destroy the drive. MOTOR SPEED-TORQUE & SPEED-POWER CURVES: The following pages contain motor speed-torque and speedpower curves. Two sets of curves are plotted per motor using the SMD 703. One set was taken at 54 VDC power supply voltage, the other at 27 VDC. The dynamometer moment of inertia was adjusted to be equivalent to the motor's moment of inertia. The test data was collected at 100 points between zero and 10,000 full steps per second. The motors were operated in the parallel configuration for both test runs. The lower voltage test run is representative of a series configured motor run at 54 VDC supply voltage. A power supply voltage between the two test run voltages would yield results between the plotted results. The dotted power output curve is the mechanical power output of the motor, measured in watts. - 22 - SUPERIOR M093-FD14 400 0K 1K 2K 3K 4K 5K 6K 7K 8K 9K 10K 350 300 250 TORQUE (OZ/IN) 200 150 100 397 397 380 279 215 171 140 117 99 85 74 0 88 168 185 190 190 186 181 176 171 165 POWER (WATTS) 50 1K 2K 400 3K 4K 5K 6K FULL STEPS PER SECOND 7K 8K RAPIDSYN 34D-9214R 0K 1K 2K 3K 4K 5K 6K 7K 8K 9K 10K 350 300 250 9K TORQUE (OZ/IN) 200 224 213 204 195 163 137 118 99 87 76 67 10K 0 47 90 129 145 152 157 154 154 152 148 150 100 POWER (WATTS) 50 1K 2K 3K 4K 5K 6K FULL STEPS PER SECOND - 23 - 7K 8K 9K 10K WARNER SM-200-0125-BC 200 175 150 125 100 TORQUE (OZ/IN) 75 0K 1K 2K 3K 4K 81 73 71 67 60 0 16 31 45 53 5K 6K 7K 8K 9K 10K 65 69 66 67 67 68 72 92 106 126 133 152 50 25 POWER (WATTS) 1K 2K 200 175 150 3K 4K 5K 6K FULL STEPS PER SECOND 7K 8K MAE MY200-2240-460A8 9K 0K 1K 2K 3K 4K 5K 6K TORQUE (OZ/IN) 125 7K 8K 9K 10K 100 10K 145 0 144 31 138 61 139 92 124 109 113 125 99 132 86 74 67 59 134 132 133 131 75 50 POWER (WATTS) 25 1K 2K 3K 4K 5K 6K FULL STEPS PER SECOND - 24 - 7K 8K 9K 10K MAE MY200-3437-400A8 400 0K 1K 2K 3K 4K 5K 6K 7K 8K 9K 10K 350 300 250 TORQUE (OZ/IN) 200 224 238 229 184 151 120 101 85 73 65 57 0 52 101 122 134 133 134 133 129 130 127 150 100 50 POWER (WATTS) 1K 2K 3K 4K 5K 6K FULL STEPS PER SECOND 7K 8K 0K 1K 2K 3K 4K 5K 6K 7K 8K 9K 10K 350 300 200 10K SUPERIOR M093-FD11 400 250 9K TORQUE (OZ/IN) 397 397 294 199 149 117 93 78 63 53 45 0 88 130 132 132 129 124 120 113 105 100 150 POWER 100 (WATTS) 50 1K 2K 3K 4K 5K 6K FULL STEPS PER SECOND - 25 - 7K 8K 9K 10K BODINE 34T3 2005 400 0K 1K 2K 3K 4K 5K 6K 7K 8K 9K 10K 350 300 250 200 TORQUE (OZ/IN) 368 346 277 188 141 113 93 76 65 56 48 0 76 123 125 125 126 124 118 116 111 107 150 100 POWER (WATTS) 50 1K 2K 3K 4K 5K 6K FULL STEPS PER SECOND 7K 8K 9K 10K JAPAN SERVO KP88M2-001 400 0K 1K 2K 3K 4K 5K 6K 7K 8K 9K 10K 350 300 250 200 TORQUE 397 397 269 188 135 107 87 73 60 51 43 0 88 119 125 120 119 116 113 107 102 96 (OZ/IN) 150 POWER 100 (WATTS) 50 1K 2K 3K 4K 5K 6K FULL STEPS PER SECOND - 26 - 7K 8K 9K 10K RAPIDSYN 34D-9206A 400 0K 1K 2K 3K 4K 5K 6K 7K 8K 9K 10K 350 300 250 200 150 100 50 246 234 213 156 121 98 81 67 57 49 43 0 51 94 103 107 108 107 104 102 99 96 TORQUE (OZ/IN) POWER (WATTS) 1K 2K 3K 4K 5K 6K FULL STEPS PER SECOND 7K 8K 9K 10K VEXTA PH265-05 200 46 0 39 8 36 16 35 23 39 35 43 48 46 62 47 73 49 87 48 96 49 108 0K 1K 2K 3K 4K 5K 6K 7K 8K 9K 10K 175 150 125 100 75 50 TORQUE (OZ/IN) 25 POWER (WATTS) 1K 2K 3K 4K 5K 6K FULL STEPS PER SECOND - 27 - 7K 8K 9K 10K VEXTA PH296-01 400 0K 1K 2K 3K 4K 5K 6K 7K 8K 9K 10K 350 300 250 200 150 151 141 140 135 113 93 81 68 57 49 43 0 31 62 90 100 103 107 106 102 99 96 TORQUE (OZ/IN) 100 50 POWER (WATTS) 1K 2K 3K 4K 5K 6K FULL STEPS PER SECOND 7K 8K 10K BODINE 34T2 2104 400 0K 1K 2K 3K 4K 5K 6K 7K 8K 9K 10K 350 300 9K TORQUE (OZ/IN) 250 200 0 262 54 248 94 213 159 105 118 105 93 103 99 74 94 60 88 49 83 42 79 35 150 100 50 POWER (WATTS) 1K 2K 3K 4K 5K 6K FULL STEPS PER SECOND - 28 - 7K 8K 9K 10K SUPERIOR M092-FD08 400 0K 1K 2K 3K 4K 5K 6K 7K 8K 9K 10K 350 300 250 200 150 100 294 0 283 62 219 97 156 103 113 100 92 101 74 99 62 96 51 91 43 87 37 82 TORQUE (OZ/IN) POWER (WATTS) 50 1K 2K 3K 4K 5K 6K FULL STEPS PER SECOND 7K 8K 9K 10K SUPERIOR ME61FD-80083 200 0K 1K 2K 3K 4K 5K 6K 7K 8K 9K 10K 175 150 125 100 74 70 65 65 67 68 64 60 54 49 44 0 15 29 43 59 76 86 94 96 97 98 75 50 25 TORQUE (OZ/IN) POWER (WATTS) 1K 2K 3K 4K 5K 6K FULL STEPS PER SECOND - 29 - 7K 8K 9K 10K JAPAN SERVO KPM8AM2-001 400 0K 1K 2K 3K 4K 5K 6K 7K 8K 9K 10K 350 300 250 224 212 198 143 109 85 70 57 48 42 37 0 47 87 95 96 95 93 89 85 83 82 200 TORQUE 150 (OZ/IN) 100 POWER 50 (WATTS) 1K 2K 3K 4K 5K 6K FULL STEPS PER SECOND 7K 8K 0K 1K 2K 3K 4K 5K 6K 7K 8K 9K 10K 175 150 125 100 50 25 10K VEXTA PH268-05 200 75 9K 78 75 70 71 71 73 67 60 53 46 40 0 16 31 47 63 81 89 94 95 93 89 TORQUE (OZ/IN) POWER (WATTS) 1K 2K 3K 4K 5K 6K FULL STEPS PER SECOND - 30 - 7K 8K 9K 10K SUPERIOR M091-FD09 400 0K 1K 2K 3K 4K 5K 6K 7K 8K 9K 10K 350 300 250 200 137 129 123 118 98 82 70 59 49 43 37 0 28 54 78 87 91 93 91 88 87 82 150 100 TORQUE (OZ/IN) 50 POWER (WATTS) 1K 2K 3K 4K 5K 6K FULL STEPS PER SECOND 7K 8K 9K 10K SUPERIOR M061-FD08 200 0K 1K 2K 3K 4K 5K 6K 7K 8K 9K 10K 175 150 125 100 48 44 39 36 39 43 44 43 43 42 40 0 9 17 24 35 48 59 67 77 85 89 75 TORQUE 50 (OZ/IN) 25 POWER (WATTS) 1K 2K 3K 4K 5K 6K FULL STEPS PER SECOND - 31 - 7K 8K 9K 10K RAPIDSYN 23D-6306 200 150 125 147 138 129 120 101 77 65 53 46 37 30 0K 1K 2K 3K 4K 5K 6K 7K 8K 9K 10K 175 TORQUE (OZ/IN) 100 0 30 57 80 89 85 87 83 82 74 67 75 50 POWER (WATTS) 25 1K 2K 3K 4K 5K 6K FULL STEPS PER SECOND 7K 8K 9K 10K RAPIDSYN 34-9601A 400 0K 1K 2K 3K 4K 5K 6K 7K 8K 9K 10K 350 300 250 200 146 140 134 109 87 70 57 48 40 34 29 0 31 59 72 77 77 76 74 71 68 65 150 100 TORQUE (OZ/IN) POWER 50 (WATTS) 1K 2K 3K 4K 5K 6K FULL STEPS PER SECOND - 32 - 7K 8K 9K 10K SUPERIOR M091-FD-6006 400 0K 135 1K 131 2K 124 3K 98 4K 76 5K 63 6K 51 7K 43 8K 35 9K 31 10K 29 350 300 250 200 0 29 55 65 67 70 68 67 63 62 65 150 100 TORQUE (OZ/IN) 50 POWER (WATTS) 1K 2K 3K 4K 5K 6K FULL STEPS PER SECOND 7K 8K 9K 10K VEXTA PH299-01 400 0K 1K 2K 3K 4K 5K 6K 7K 8K 9K 10K 350 300 250 200 283 260 170 112 78 63 49 43 35 31 26 0 57 75 74 69 70 66 67 63 62 58 150 100 50 TORQUE (OZ/IN) POWER (WATTS) 1K 2K 3K 4K 5K 6K FULL STEPS PER SECOND - 33 - 7K 8K 9K 10K RAPIDSYN 23D-6204 200 0K 106 1K 99 2K 93 3K 81 4K 64 5K 50 6K 42 7K 35 8K 29 9K 24 10K 21 175 150 125 100 0 21 41 53 57 56 55 54 52 49 46 TORQUE 75 (OZ/IN) 50 POWER 25 (WATTS) 1K 2K 3K 4K 5K 6K FULL STEPS PER SECOND 7K 8K 9K 10K SUPERIOR M062-FD04 200 0K 1K 2K 3K 4K 5K 6K 7K 8K 9K 10K 175 150 125 100 99 95 88 67 53 42 34 28 24 21 17 0 21 39 45 46 47 45 44 42 41 39 75 TORQUE (OZ/IN) 50 25 POWER (WATTS) 1K 2K 3K 4K 5K 6K FULL STEPS PER SECOND - 34 - 7K 8K 9K 10K WARNER SM-200-0080-B8 200 59 56 53 53 44 36 28 23 19 17 0 0K 1K 2K 3K 4K 5K 6K 7K 8K 9K 10K 175 150 125 100 0 12 23 35 39 40 37 36 34 34 0 75 50 TORQUE (OZ/IN) 25 POWER (WATTS) 1K 2K 3K 4K 5K 6K FULL STEPS PER SECOND 7K 8K 10K 0K 149 1K 131 2K 76 3K 51 4K 37 5K 26 6K 21 7K 17 8K 0 9K 0 10K 0 0 29 33 34 33 29 29 26 0 0 0 9K 10K SUPERIOR M091-FD03 400 350 300 250 200 150 9K TORQUE (OZ/IN) 100 50 POWER (WATTS) 1K 2K 3K 4K 5K 6K FULL STEPS PER SECOND - 35 - 7K 8K RAPIDSYN 23D-6102 200 0K 1K 2K 3K 4K 5K 6K 7K 8K 9K 10K 175 150 125 100 63 56 55 47 36 28 22 18 0 0 0 0 12 24 31 32 31 30 29 0 0 0 75 50 TORQUE (OZ/IN) 25 POWER (WATTS) 1K 2K 3K 4K 5K 6K FULL STEPS PER SECOND 7K 8K 9K 10K SUPERIOR M061-FD02 200 0K 1K 2K 3K 4K 5K 6K 7K 8K 9K 10K 175 150 125 100 63 59 50 35 28 21 17 0 0 0 0 0 13 22 23 24 23 23 0 0 0 0 75 50 TORQUE (OZ/IN) 25 POWER (WATTS) 1K 2K 3K 4K 5K 6K FULL STEPS PER SECOND - 36 - 7K 8K 9K 10K SPECIFICATIONS PARAMETER MIN MAX UNITS .1 .1 Full-step 24 50 18 .75 1.5 60 60 24 3.5 7.0 ELECTRICAL: GENERAL Resolution SMD 703 & SMD 707 Supply voltage Current (no motor) PWM frequency Motor current SMD 707 SMD 703 Motor Inductance 1 STEP PULSE INPUT Voltage Input impedance Pulse 'high' Pulse 'low' Rise time Fall time Frequency Logic '1' volts DIRECTION INPUT Voltage Current Logic '1' volts ENVIRONMENTAL: Operating temp. Humidity Shock Dust, oil, etc. VDC mA kHz ampere ampere mH 0 12 1 1 ------+1.8 +5.0 20 ----.5 .5 500 +2.0 VDC mA µSEC µSEC µSEC µSEC KHz VDC 0 12 +1.8 +5.0 20 +2.0 VDC mA VDC -20 +75 C 0 100 % --150 G ---- NO LIMIT ---- MECHANICAL: Weight Size Mounting hole centers Mounting screw size 19 20 8h x 4w x 4.5d 3.625 x 3.625 #6 #8 - 37 - OZ inches inches - 38 -