1
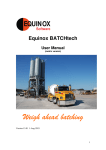
Chapter 2 Constructing Dynamic System Models The following equation is a symbolic version of the transfer function originally defined in the SISO Transfer Function Models section of this chapter. 1 ------LC H ( s ) = ------------------------------2 Rs 1 s + ------ + ------L LC Specify the Symbolic Numerator and Symbolic Denominator coefficients using the variable names R, L, and C. You then specify values of the numerator and denominator coefficients in the variables input, as shown in Figure 2-8. Figure 2-8. Creating a SISO Symbolic Transfer Function Model Constructing Zero-Pole-Gain Models Zero-pole-gain models are rewritten transfer function models. When you factor the polynomial functions of a transfer function model, you get a zero-pole-gain model. This factoring process shows the gain and the locations of the poles and zeros of the system. The locations of these poles determine the stability of the dynamic system. You analyze zero-pole-gain models in the frequency domain. The following equations define continuous and discrete zero-pole-gain models, where the numerators and denominators are products of first-order polynomials. Control Design User Manual 2-12 ni.com