1
NAVA;.
MOiTTiiJ£Ui i
.
-^
3 SCHOOL
i A 93943-5002
LPOS
MOJIBEBY,
NAVAL
moittb;
NAVAL POSTGRADUATE SCHOOL
Monterey, California
7w^
^
"7.
f
DESIGN AND IMPLEMENTATION OF AN EXPERT USER
INTERFACE FOR THE COMPUTER AIDED PROTOTYPING
SYSTEM
by
Henry G. Raum
9
» B
December 1988
Thesis Advisor:
Approved
Luqi
for public release; distribution is unlimited
T2422RO
iclassified
Cla?sificaiion of this pace
:urit>
REPORT DOCUMENTATION PAGE
Report Security Classification
Unclassified
1
Secunt\ Classification Authoni\
Approved
Performing Organization Report Number(s)
Name
Address
(city, state,
onterev,
Name
CA
(If
Applicable)
Address
(city, state,
7b
Address
Monterey,
8b Office Symbol
(city, stale,
CA
Personal Author(s)
Procurement Instrument Identification Number
9
Source of Funding Numbers
1
aster's
Proieci
No
|
Task
No
|
Worx
Design and Implementation of an Expert User Interface for the
1-
nn Access.or \c
Computer
Henrv G. Raum
1
Thesis
3b Time Covered
14 Dale of Report (year, month.day)
1
5
Page Count
December 1988
To
From
Supplementary Notation
The views expressed
in this thesis are those
92
of the author and do not reflect the official
or position of the Department of Defense or the U.S. Government.
)licy
Cosati Codes
Group
Id
|
System
T>pe of Report
a
and ZIP code)
93943-5000
Program Elemor. Number
ided Prototyping
unlimited.
Applicable)
and ZIP code)
Title (Include Security Classification)
is
Name of Monitoring Organization
Naval Postgraduate School
and ZIP code)
(If
for public release; distribution
7a
37
93943-5000
of Funding/Spwnsoring Organization
Markings
Monitoring Organization Report Number(s)
5
6b Office Symbol
of Performing Organization
Postgraduate School
Restrictive
Distribution Availability of Report
3
Declassification/DowTigrading Schedule
ival
h
1
Subgroup
Abstract (corainue on reverse
Subject Terms (continue on reverse
8
if
necessary and identify by block number)
Rapid Prototyping, Computer Aided Software
Engineering (CASE). Ada, Real-Time, Embedded Systems
User
if
Interface, Expert System,
necessary and ideruify by block number
This thesis builds on previous work done in the development of the Computer Aided Protot>'ping System
-APS) and the Prototype System Description Language (PSDL). The increases in the size and complexity of
iftware projects have caused system designers to reevaluate traditional software engineering methodologies,
apid prototyping is a method that allows the validation of system requirements and design early in the
;veIopment cycle. The need for this type of tool is particularly critical in the development of real-time embedded
stems. CAPS is one such system.
CAPS is a complex system that consists of many individual software tools. An expert user interface that
tides the software designers through the development and execution of a prototype is described in this thesis.
Distribution/Availability of Abstract
'
|X|
a
)
unclassLfied/unlimiied
Name
Luqi
FORM
I
same
as
2
repwn
I
I
DTIC
users
of Responsible Individual
1473, 84
MAR
1
Abstract Security Classification
Unclassified
22b Telephone (Include Area code)
(408) 646-2735
83
APR
edition
may
be used until exhausted
All other editions are obsolete
22c Office SymbolT.
52Lq
security classification of this page
Unclassified
Approved
for public release; distribution is unlimited
DESIGN AND IMPLEMENTATION OF AN EXPERT USER INTERFACE
FOR THE COMPUTER AIDED PROTOTYPING SYSTEM
by
Henry G./Raum
Captain, United States Marine Corps
B.S., United States Naval Academy, 1980
Submitted in partial fulfillment of the
requirements for the degree of
MASTER OF SCIENCE IN COMPUTER SCIENCE
from the
NAVAL POSTGRADUATE SCHOOL
December 1988
ABSTRACT
This thesis builds on previous work done in the development of the Computer
Aided Prototyping System (CAPS) and the Prototype System Description Language
(PSDL). The increases
system designers
Rapid prototyping
and design early
in the size
and complexity of software projects have caused
to reevaluate traditional
is
a
method
in the
software engineering methodologies.
that allows the validation of
development cycle.
particularly critical in the
The need
system requirements
for this type of tool
is
CAPS
is
development of real-time embedded systems.
one such system.
CAPS
is
a
complex system
that consists of
many
individual software tools.
An
expert user interface that guides the software designers through the development
and execution of a prototype
is
described in this thesis.
Ill
1
»
'>
TABLE OF CONTENTS
I.
INTRODUCTION
A.
1
DESCRIPTION OF SOFTWARE ENGINEERING
METHODOLOGIES
II.
2
1.
Traditional Software Engineering Paradigm
2
2.
Prototyping in Software Engineering
3
B.
OBJECTIVES
4
C.
ORGANIZATION
5
BACKGROUND
A.
DESCRIPTION OF CAPS
1.
2.
3.
B.
6
Architecture of
6
CAPS
6
Module
a.
The User
b.
The Software Base and Rewrite System
7
c.
The Execution Support System
8
Description of
Interface
PSDL
Elements of
b.
Example of PSDL
The
CAPS
9
PSDL
a.
6
9
10
14
Process
a.
Prototype Design
15
b.
Prototype Construction
15
c.
Prototype Execution
17
d.
Prototype Debugging and Modification
19
PRINCIPLES OF THE USER INTERFACE
20
Expert System and Sequence Control
20
1.
IV
III.
2.
DataEntr)'
22
3.
Data Entry Methods
22
DESIGN OF THE USER INTERFACE
24
A.
BOURNE SHELL SCRIPTS AND UNIX OPERATING SYSTEM
24
B.
PROTOTYPE CONSTRUCTION
25
C.
D.
E.
1.
The Design Database
25
2.
The Graphic Editor
11
3.
The Syntax Directed Editor
27
4.
The Software Base
27
5.
The User Interface
28
6.
Sequence Control
29
PROTOTYPE EXECUTION
31
1.
The Translator
32
2.
The
32
3.
The Dynamic Scheduler
33
4.
Sequence Control
33
Static
Scheduler
PROTOTYPE DEBUGGING AND MODIHCATION
34
1.
The Debugger
34
2.
Modifying the Prototypes
34
a.
Modifying an Operator
35
b.
Consistency of Views
36
TOP LEVEL USERS MANUAL
36
1.
The Caps Command
36
2.
The Construct Command
37
3.
The Execute Command
37
.
The Modify Command
4.
EVOLUTION OF THE USER INTERFACE
39
IMPLEMENTATION OF THE USER INTERFACE
40
F.
IV.
A.
THE LINK STATEMENT ANALYZER
40
B.
SEQUENCE CONTROL IN THE USER INTERFACE
43
C.
D.
V.
38
1
Implementation of the Construction Subsystem
43
2.
Implementation of the Execution Support System
45
3.
Implementation of Debugging and Modification
46
EXAMPLE BOURNE SHELL SCRIPTS
1.
The Construct
2.
The Graphic Editor
47
47
Script
Script
FUTURE IMPLEMENTATION
CONCLUSIONS
49
51
52
A.
FEASIBILITY ISSUES
52
B.
BEN^RTS OF THE STUDY
52
C.
RECOMMENDATIONS
53
L
Primary Data Entry
53
2.
Prototype Modification
53
3.
Execution Monitoring
54
D.
APPLICATION OF CAPS IN THE DEPARTMENT OF DEFENSE
AND THE DEPARTMENT OF THE NAVY
^4
GRAMMAR
56
APPENDIX
A.
PSDL
APPENDIX
B.
BRAIN TUMOR TREATMENT SYSTEM EXAMPLE
59
APPENDIX
C.
PASCAL PROGRAM NODES.P
62
APPENDIX
D.
INPUT AND OUTPUT LINK ANALYZER
71
VI
APPENDIX
E.
BOURNE SHELL SCRIPTS
73
REFERENCES
75
BIBLIOGRAPHY
77
INITIAL DISTRIBUTION LIST
78
Vll
LIST OF FIGURES
4
Figure
1.
The Prototyping Method
Figure
2.
The Architecture of
Figure
3.
Graphic Decomposition
10
Figure
4.
PSDL
Operator Specification
11
Figure
5.
PSDL
Operator Implementation
12
Figure
6.
PSDL Data Type
Figure
7.
PSDL
Figure
8.
Execution Support System
18
Figure
9.
Sequence Control Dialogs
21
Figure 10.
Operator Decomposition
30
Figure 11.
Conceptual
Figure 12.
Declaration Section of Nodes.p
41
Figure 13.
Input and Output of Nodes.p
42
Figure 14.
Construct Script
48
Figure 15.
Graphical Editor Script
50
CAPS
Specification and Implementation
14
17
Construction
DDB
7
Structure
vm
32
LIST OF ABBREVIATIONS
CAPS
Computer Aided Prototyping System
DDB
DFD
Design Database
DOD
DON
Department of Defense
DS
Dynamic Scheduler
ESS
Execution Suppx)rt System
GE
Graphic Editor
MCP
MET
MRT
Minimum Calling Period
Maximum Execution Time
Maximum Response Time
PSDL
Prototype System Description Language
SB
Software Base
SDE
TR
Syntax Directed Editor
Translator
UI
User Interface
Data Flow Diagram
Department of the Navy
IX
NAVA
moitt:
I.
Over
INTRODUCTION
the last twenty years,
exceeded those
in software
is
computer hardware have
in
development. This "software
improved performance of systems
problem
advancements
is
expected [Ref. 7:p.
that the users of the software
crisis"
11].
far
must be resolved
The most
if
significant
systems often do not understand software
engineering and the software engineers do not understand the needs of the users.
As
a result,
poor requirements analysis often leads
traditional software engineering
coding
is
paradigm
complete. This results in
to
an improper design.
testing of the
much wasted
system
effort as
is
In the
done only
after
improper specifications
are coded.
An
alternate approach to software engineering
model of
the eventual
program
is
is started.
One system
prototyping. In this
quickly constructed and tested.
evaluate the design of the system and
coding
is
make
modifications,
if
The goal
is
the
Ada®^ program
that
performing correctly.
Ada
is
Computer
This system constructs a prototype from
System Description Language (PSDL)
and generates an executable model of the real-time system. This model
Office
is to
necessary, before the
implements the prototyping methodology
that
specifications described in the Prototyping
^
a
[Ref. 2:p. 69]
Aided Prototyping System (CAPS).
an
method
can be executed and modified
until the
is
actually
prototype
is
[Ref. 3]
a registered trademark of the U.S.
Government, Ada Joint Program
CAPS
Defense
that all
that
applicable to the Department of the
is
(DOD) because
generates an
it
embedded systems
in
DOD be
Ada®
Navy (DON) and Department
prototype.
implemented
in
demonstrates use of the language constructs makes
The
users of this system
may
not be familiar with
even have any software engineering expertise. For
With
the requirement
Ada®, an Ada® prototype
CAPS more
attractive.
PSDL or CAPS
this reason,
interface that guides the user through the production
of
may
and
not
an intelligent user
of the prototype
is
required.
This thesis will describe the design and implementation of such a user interface.
The remainder of
this
chapter will describe the traditional and rapid
protot>'ping software engineering
methods and
a description of the elements and processes of
A.
the
CAPS
CAPS
system. This will include
and an overview of PSDL.
DESCRIPTION OF SOFTWARE ENGINEERING
METHODOLOGIES.
1.
Traditional Software Engineering Paradigm
The
model",
is
traditional software engineering
a systematic,
paradigm, often called the "waterfall
sequential approach [Ref. 2:p. 13].
This model begins
with requirements analysis and continues with functional specification, design,
coding and
testing.
environment
it
Requirements analysis defines the scope of the system, and the
will operate in, while the functional specification describes
interfaces to the proposed system and the functions of that system.
includes
the
stage
decomposition and detailed design. The data structures, software
architecture and procedural details are key issues at this stage.
where the designed system
a high level
The design
is
written into a
programming language.
The coding
stage
is
form usable by the computer, normally
Finally, testing is done.
These
tests
not only
show
that the
program meets
and specifications, but determines
the requirements
these requirements produce the desired results.
The
much
fact that
[Ref. 4]
coding and testing occurs so
criticism of the "waterfall model".
late in the
difficult for the
It is
process has brought
customer
to
furnish
complete requirements before the process begins. In large software systems
can lead
to a disaster if a
discovered until testing.
2.
major oversight
in the
requirement analysis phase
this
is
not
[Ref. 2:p. 15]
Prototyping in Software Engineering.
In response to the
problems
in the "waterfall
model"
that is well suited to the iterative nature of the
When
software systems.
new approach
a
software engineering, called prototyping, has been devised.
method
if
Prototyping
is
to
a
development of many
the customers requirements cannot be completely
determined or there are questions about the suitability of proposed algorithims or
what the human
interface should be, prototyping allows a
can be tested and modified.
model
After testing the prototype, a
new
to
be built which
set of
improved
specifications can be used in the coding phase.
Figure
requirements
is
1
illustrates
how,
in this
method, testing and refinement of
done before the actual product
cost savings can be realized because code
is
is
engineered. Significant time and
not being written for incomplete and
erroneous specifications. The complex and uncertain timing requirements of realtime embedded systems makes them good candidates for prototyping. P^ef. 2]
The problem with prototyping
is
the cost of developing the prototype itself. Paper
prototypes are easy to construct, but do not
Working prototypes can show
the system.
In the
show
the
dynamic nature of the system.
the feel of the program, but are limited to a subset of
Computer Aided Prototyping System
the entire system
is
modeled. The time required
to build this prototype is greatly
use of syntax directed and graphic editors, reusable
contained execution and debugging system.
CAPS
Ada® modules
system, executing that prototype and measuring
software engineering effort,
CAPS
falls
and a
self-
attempts to validate the timing
embedded systems by constructing
aspects of real-time
reduced through the
its
a prototype of the entire
As
performance.
part of the
between the requirements analysis and
coding phases.
Requirements
Analysis
i
I
'
\
Develop
Prototype
1
'
Test and
Evaluation of
Prototype
'
1
Engineer
Product
Figure
B.
1.
The Prototyping Method
OBJECTIVES
This thesis describes the design and implementation of an expert user interface
for
CAPS. The primary
objective
is
to define the
proper use of database, graphic,
and operating systems technology in the design of the interface.
Secondly,
this
thesis will explore the use of expert
can free the user from
many
system technology to produce an interface
that
of the details of the system operation. In this way, an
error free prototype can be produced quickly and easily.
C.
ORGANIZATION
Chapter
CAPS,
background research and includes
a description of
System Description Language (PSDL) and
the principles of
outlines the
II
the Prototype
the user interface in software systems.
Chapter
III
describes a design for the user interface to include the interfaces
between
CAPS
and the user as well as those between the various elements of the
system.
This chapter includes a users manual and recommendations
for future
implementation.
Chapter IV outlines the implementation of the design, both what has been done
and what
is
recommended
Chapter
V
for future implementation.
contains conclusions and recommendations of this research.
BACKGROUND
II.
The Computer Aided Prototyping System
tools that enable the user to
A.
a
complex collection of software
produce executable prototypes of large real-time
embedded systems. This chapter
detail.
is
outlines the
components of
CAPS
and
PSDL
in
Finally the principles of the user interface are investigated.
DESCRIPTION OF CAPS
1.
Architecture of
CAPS
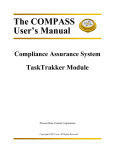
CAPS
consists of
many
software tools that each have a part in the
production of the prototype. The position of each component in the overall system
is
illustrated in Figure 2.
a.
A
brief description of the
components follows.
The User Interface Module.
This module consists of two editors, a syntax directed editor and a
graphical editor.
become
Together these editors produce the
PSDL
program
that will
the prototype.
(1)
The Syntax Directed Editor
and proper syntax of PSDL.
It
is
an editor that knows the key words
insures grammatically correct
PSDL
as
it
guides the
user through the production of the program.
(2)
of
The Graphic Editor
PSDL components
is
an editor that describes the decomposition
by the use of enhanced data flow diagrams.
It is
in these
diagrams that the user "creates" the program.
(3)
The Design Database
is
the structure that stores the elements of the
system under construction. This database
is
organized to handle the hierarchical
nature of the top-down development of the system.
abihty to keep a history of the prototype
The design database
when changes
are
Software
Rewrite
Base
System
made. [Ref.
also has the
4:p. 29]
1
User Interface
Design
Syntax
Data
Directed
Base
Graphic
Editor
Editor
T
Execution Support
System
Translator
Dynamic
Debugger
Static
Scheduler
Scheduler
Figure
2.
Architecture of
Figure
b.
2.
Caps
The Architecture of CAPS
The Software Base and Rewrite System
Together the software base and rewrite system give
retrieve reusable
Ada®
components
CAPS
for construction of the prototype.
its
ability to
(1)
The Rewrite System. The purpose of
provide a method for mapping
This
all
the rewrite system
equivalent specifications to one
common
is to
form.
called the normalized form.
is
(2)
The software base
is
a database of reusable
PSDL
are indexed and searched for based on
Ada® components
specifications.
Ada® module
that fulfills the desired function.
prototype there
is
that
This will provide an
In the production of a rapid
no time for browsing a software library by name,
as in a
yellow
pages type of index. [Ref. 5:pp. 68-69]
c.
The Execution Support System
The Execution Support System (ESS)
scheduler, a dynamic scheduler and a debugger.
CAPS
PSDL
is to
produce a
program
PSDL
consists of a translator, a static
While
the purpose of the rest of
program, the function of the
into a executable
Ada®
ESS
is to
translate the
prototype that tests the real-time aspects of
the designed system.
(1)
The
Translator.
translator starts with the
retrieved in the software base and adds to
PSDL
to
produce an
(2)
critical
Ada® module
The
that
in
the control constants described in
can be scheduled.
Static Scheduler.
components together
them
Ada® components
The
static
scheduler links
all
of the time
an executable schedule that can demonstrate the
real-time aspects of the system.
(3)
time
critical
The Dynamic Scheduler. The dynamic scheduler adds
components
(4)
to the
system
to
produce an overall schedule.
The Debugger. The debugger provides an
user and the executing prototype.
the non-
The user may be asked
interface
between the
to correct a
problem
the prototype or be presented with statistics on the operation of the prototype.
in
Description of
2.
PSDL
The Prototype System Description Language
language that
this
used
at the
Ada®
an executable prototyping
design level. The user can define the specifications in
language and these specifications are used
reusable
then
is
is
components.
If
a suitable
module
is
not found the
decomposed by drawing an enhanced data flow diagram
level operators, the data streams
control constraints.
(1)
some
operator
that includes
is
lower
between these operators, as well as timing and
PSDL
Operators are the basic component in
Operators.
can represent functions or
arrival of
PSDL
[Ref. 5:p. 68]
Elements of
a.
software base of
to search the
state
PSDL. They
machines. These operators can be triggered by the
input (sporadic) or at fixed time intervals (periodic).
When
triggered the operator will fire (produce output) based on input values and the
value of the internal
state
variable
in
of the
case
the
state
machine.
[Ref. 6:pp. 12-13]
Operators are called atomic
base, otherwise they are called composite and
diagram.
if
they can be found in the software
must be decomposed with a data flow
Figure 3 shows such a decomposition.
Data streams
respective input and output of the composite operator and
B, and
C
are
newly created operators
that
may be
s
is
w
and z are the
the state variable. A,
atomic or composite themselves.
[Ref. 5]
(2)
Data Streams.
A
data stream represents the flow of data between
two operators. This communication can be
sampled stream.
A data flow
a data flow stream
is
never
in the
form of a data flow stream or
stream can be thought of as a
lost
and
is
always acted on
FIFO
in the
queue. In this
a
way
order of arrival.
A
sampled stream can be thought of
many
as a single
memory
cell.
This data can be used
times or written over before use, depending on the rate of
its
input and use.
[Ref. 3]
Figure
Graphic Decomposition
3.
Data flow streams must be used when each piece of data represents
a unique transaction.
in a current
w,x,y,and
z,
A
sampled stream can simulate a sensor
parameter such as temperature.
with x and y being the
(3)
new
that is only interested
In Figure 3, the data streams are
data streams created in the decomposition.
Timing and Control Constraints. The real-time nature of
prototypes requires timing and non-procedural control constraints in
time
in
critical
which
operator has a
that operator
Maximum Execution
Time, which
can complete execution after
it fires.
is
the
the
PSDL. Each
maximum
time
Control Constraints
give conditional requirements on the firing of operators.
b.
Example of PSDL.
To
illustrate the
system that was defined
PSDL program
the
example of the Hyperthermia
in the conceptual research for
This example illustrates a
CAPS
[Ref. 3] will be used.
dynamic real-time environment
that is easy to
understand.
One approach
combating cancer is to destroy tumorous cells
One way to do this is with a hyperthermia system,
which uses a microwave generator connected to a fine tuner and matching
to
selectively with heat.
control system to produce and deliver controlled, local heating directly to the
10
tumors. A computerized control system adjusts power output automatically
to maintain the temperature in accordance with the treatment plan.
The hyperthermia system has four subsystems: a computer system, an
operator's panel, a microwave generator, and a temperature sensor. The
subsystem is the software that receives input from the temperature
sensor and produces control commands to operate the whole system. The
software controls the rest of the system, which is typical of real-time
critical
embedded systems.
(1)
in
Figure
list,
4.
a state
[Ref. 4:p. 30]
PSDL
Specification.
The operator
The Specification includes
list (if
operator
is
is
found
OPERATOR
this
the operator
PSDL
name, an input
list,
as
shown
an output
a state machine), optional exception declarations
timing information. This specification
match
described in
is
composite operator
is
is
used to search the software base.
decomposed
in the
implementation
and
If
no
part.
Brain_tumor_treatment_system
SPECIFICATION
INPUT patient_chart:
treatment_switch
:
medical_history,
boolean
OUTPUT treatment_finished:
boolean
STATES temperature: real INITIALLY 37.0
DESCRIPTION {This is an English description
of the operator specificatioa}
ENTD
Figure
4.
PSDL Operator
Specification
Timing constraints may be added
to a specification in the
following ways:
•
Maximum
•
Maximum Response Time (MRT)
•
Minimum
Execution Time (MET) which places a maximum time on the
execution of an operator from initiation to completion.
has slightly different meanings for
sporadic and periodic operators. It is the time between the start of the period
and the moment of the last output of an operator for periodic operators and is
the time between arrival of new data and the moment of output for sporadic
operators.
(MCP) is required for any sporadic operator with
the minimum time from the arrival of one set of data to the
arrival of the next. [Ref. 6:pp. 20-21]
an
Calling Period
MRT and
is
11
PSDL
(2)
Implementation. The implementation part of
consists of the graph (data flow diagram), a
constraints for the
newly created operators.
Figure 3 would appear in
PSDL
list
of
new
PSDL
data streams and control
The data flow diagram shown
as the link statements
shown
after the
in
keyword
GRAPH in Figure 5. A link statement is of the form:
data_stream.from_operator:met->to_operator [Ref. 7:p. 26]
The from
.
operator, in the case of an input, and the to operator, in the case of an
output, will be represented by the
keyword
EXTERNAL. The maximum execution
time of the operator, and the colon, are omitted for non-time critical operators.
The Data Stream
part lists the
new
internal data streams
named
in the
graphical
decomposition.
IMPLEMENTATION
GRAPH temperature.EXTERNAL
-> hyperthermia_system
patient_chart.EXTERNAL -> hyperthermia_system
-> hyperthermia_system
treatment_s witch.
EXTERNAL
treatment_power.hyperthermia_system -> simulated_patient
treatment_fmished.hyperthermia_system -> EXTERNAL
temperature. simulated_patient -> hyperthermia_system
DATA STREAM treatment_power real
:
CONTROL CONSTRAINTS
OPERATOR hyperthermia_system
PERIOD 200 ms BY REQUIREMENTS
OPERATOR simulated_patient
PERIOD 200 ms
DESCRIPTION {some
shutdown
text about it}
END
Figure
5.
PSDL Operator
The Implementation
Constraint part of
PSDL. These
section
Implementation
is
completed with the Control
control constraints include data triggers, periods,
conditionals, timers and exceptions.
interconnections between operators.
12
This information
is
used
to
define
The most common control method
The period
operator.
shown
is
The data
in
the period and data trigger.
Figure 5 and indicates the synchronous timing of the
trigger
examples of data triggers
is
is
Two
used to indicate control from arriving data.
are:
OPERATOR A TRIGGERED BY ALL x,y,z.
OPERATOR B TRIGGERED BY SOME v,w.
The by
ALL
inputs are present, while the by
V or
w
trigger causes the operator to fire
SOME trigger fires
the operator
when
all
three
when any value of
[Ref. 3:p. 17]
arrives.
Conditional Constraints add an IF predicate to the data trigger.
This boolean condition must be satisfied before the operator will
fire.
Examples of
the conditional constraint are:
OPERATOR A TRIGGERED if b<10.
OPERATOR X OUTPUT y if z:
A
reset,
and
its
timer
is
critical.
used as an internal state that can be started, stopped,
current time read by the operator to allow that operator to do
timing control
if
necessary.
It is
also possible to raise exceptions in
exceptions can be user or system defined and are raised
catastrophic conditions are encountered.
handler
at the
The exception
is
its
own
PSDL. These
when unusual
or
handled by an exception
highest level of the program.
Data Streams
utilize the operator as
implementation section as shown
in Figure 6.
operators needs to be discussed.
13
both
its
specification and
Therefore, only the construction of
TYPE
medical_histor)'
SPECIFICATION
OPERATOR
get_tumor_diameter
SPECIFICATION
INPUT
patient_chart: medical_hi story,
tumor_location:
string
OUTPUT diameter:
real
EXCEPTIONS no_tumor
MAXIMUM EXECUTION TIME 5 ms
DESCRIPTION
{This
is
an English description of the operator}
ENT)
IMPLEMENTATION
tuple[tumor_desc: map[from: string,
to: real],
...]
OPERATOR
IMPLEMENTATION
GRAPH
patient_chart.EXTERNAL-->tuple.get_tumor_desc
tumor_location.EXTERNAL-->map.fetch
diameter.map.fetch:4ms-->EXTERNAL
td.tuple.get_tumor_desc:lms-->map.fetch
DATA STREAM
td:
tumor_desc
CONTROL CONSTRAINTS
OPERATOR map.fetch
EXCEPTIONS
no_tumor IF not(map.has(tumor_location,
td))
END
Figure
3.
6.
PSDL Data Type
Specification
and Implementation
The CAPS Process
There are four major elements
in the
CAPS
process: prototype design,
construction, execution and debugging/modification.
prototype design, actually takes place outside
design a system, but rather to
test
The
initial step, called
CAPS. The purpose of CAPS
is
not to
and validate that design. Construction takes place
in the user interface portion of the system, while execution takes place in the
14
execution support system. Debugging and modification requires action in both the
user interface and execution support systems.
a.
Prototype
Design.
The design of
a decision as to
what
Then requirements
the prototype starts with an analysis of the
problem and
part or parts of the proposed system are to be prototyped.
for the prototype are generated.
These requirements are
usually written in English, but could be specified in a
Example requirements given
in
more formal
notation.
English taken from the hyperthermia example are:
Shutdown. Microwave power must drop
to zero within
300 ms of turning off
the treatment switch.
Temperature Tolerance. After the system stabilizes, the temperature must be
kept between 42.4°C and 42.6°C
Maximum
Temperature. The temperature must never exceed 42.6°C.
Startup Time. The system must stabilize within 5 minutes of turning on the
treatment switch.
The system must shut down automatically when the
temperature has been above 42.4°C for 45 minutes. [Ref. 3:pp. 28-29]
Treatment Time.
The requirements
are refined
by asking the customer questions
determine exactly what the requirements mean and
if
they are complete. With the
completion of the preliminary design, the construction of the prototype
b.
Prototype
to
may
begin.
Construction.
Construction of the prototype involves the use of the syntax directed
editor, graphic editor, design database, rewrite system, software base
15
and the
sequence control of the
and
is
CAPS
user interface. This process
is
illustrated in Figure 7
described below.
To
start the
system, the
represents the entire prototype
is
PSDL
produced
specification of the operator that
in the syntax directed editor.
After this
specification has been normalized in the rewrite system a search of the software
Ada® modules
base of reusable
is
This search by specifications
performed.
produces no match, one match, or many matches. In the case of a single match,
Ada® component
is
used as the implementation part of the operator.
match must be resolved and then the single resolved component
there
is
no match, the operator
is
enhanced data flow diagram.
creates children operators of the current operator.
produced that
frontier.
operator
At
If the
is
is
multiple
used.
When
a candidate for decomposition.
Decomposition of an operator takes place
the production of the
is
A
that
in the graphic editor
In this
with
diagram the editor
In effect a
multiway
tree is
rooted at the original operator and has atomic operators as
operator
is
its
a candidate for decomposition, but the designer feels the
it
may
would be atomic with
this
too simple for further decomposition,
this point, this operator
implementation.The design database keeps track of
be simply coded in Ada®.
newly written code
all
as its
the nodes created in the
decomposition.
The primary
structure for the
responsibility of this database
PSDL components
of each operator in a
hierarchical nature of the prototype construction.
16
to
provide a storage
way
that maintains the
is
Create Specification
I
Rewrite Specifications
I
Search Software Base
many matches
no match
I
one
match
Decompose?
yes
Resolve
no
1
Decompose
Code
Component
Operators
Retrieve
Component
1
^'
/
/
/
^'
Create
Insert
New Nodes
Implementation
Figure
The user
tools in the system.
moment and
7.
PSDL
Construction
interface controls the flow of data and the use of the various
This control includes calling the proper tool
at
any given
the repetition of the constructive process until all leaf operators in the
design database tree are atomic.
c.
Prototype
Execution.
Execution of the prototype occurs in the execution support system
(ESS), through the use of the translator,
static scheduler,
17
dynamic scheduler and the
debugger as
illustrated in
Figure
8.
The input
to the
ESS
is
the
PSDL program
that
was previously constructed.
PSDL
Static
Debugger
Scheduler
T
Static
coupled
Schedule
Ada modules
Dynamic Scheduler
T
Dynamic
Schedule
i
Compiler/Linker
T
Debugger
Executable
Ada code
Figure
The
PSDL
into
Ada®
first
8.
Execution Support System
component
in the
ESS
is
the translator,
which
translates
source code. The atomic operators are tempered by the control
constraints of the composite operators and executable
18
Ada®
packages are
produced. This collection of modules
in the
execution of the prototype.
The
Static
is
used by the
static
and dynamic schedulers
[Ref. 8:pp. 7-8]
Scheduler also utilizes
components with real-time constraints
after
PSDL
as input.
schedules
It
all
checking the compatibility of these
timing constraints between operators.
The Dynamic Scheduler combines
the non-time critical
components of
the time critical static schedule and
the prototype into a piece of executable
code called the dynamic schedule. This schedule
executed. This execution
d.
is
is
Ada®
compiled, linked and finally
the test of the prototype and the design
it
represents.
Prototype Debugging and Modification.
The debugging and modification phase of
the
CAPS
process actually
takes place over the entire system and utilizes all the various tools.
takes place in two places,
first at
The debugging
the time of the execution of the static scheduler, at
which time problems with timing constraints
that
would prohibit
the production of
the static schedule are identified and corrected, and secondly, during the execution
of the dynamic schedule. At that time problems with the dynamic execution of the
prototype are determined.
In order to resolve these problems, a modification
user interface.
is
used
in the
This modification can go to any position in the defined prototype
and modify specifications and control constraints.
interpret
mode
The user
interface
must
and make changes and, through the use of the design database, carry
this
change through the levels of decomposition. This could require new searches of the
software base, deletion of existing operators or construction of
any changes are made, the modified
PSDL program must
19
new
operators.
be run through the
If
ESS
done
again. This process will be
iteratively until the prototype
performs as desired
or demonstrates problems in original requirements.
B.
PRINCIPLES OF THE USER INTERFACE
The user
must do more than merely provide for data
that the interface
as
CAPS,
also not
enough
complex software engineering system, such
interface of a
entr>'
and display.
It is
simply provide a loose collection of software tools, rather
provide sequence control, user guidance and data protection as well.
provides
all
A
it
must
system that
these functions and unites the tools into a single system can be said to
provide a software engineering environment.
Expert System and Sequence Control.
1.
In order for software to provide all the functions of the user to
interface,
have
to be
system
The
it
is
system
must rely on expert system technology. This expert system does not
based
used
interface
to
in an Artificial Intelligence
imply an
ability to
must be able
language, rather the term expert
guide the user through the desired processes.
to interpret
what the user
is
doing
at
any time and
provide support. This expert system must communicate with the user to find out
what they want
intentions.
to
do
at
any moment when the system cannot be sure of the users
This type of expert system
is
also referred to as "mutual consultation"
[Ref. 9:p. 212].
While attempting
to
guide the user through a sequence of operations,
important to remember to allow the user to remain in control.
achieving this goal
good
to
is to
experienced user
may
One method
allow the experienced user some flexibility of control.
have an interface
that
it is
of
It is
can guide the user through the system, but an
regard such a system as "too restrictive". [Ref. 10:p. 48]
20
One
is
of the benefits of a system that requires few control actions by the user
reduced memor>' load on the user. The user does not have
do next
if
all
possible uses.
memory
load on the user
is to
remember what
Another way
the system can perform that function.
system can reduce the
to
apply
all
to
that this expert
known
information
to
This frees the users from needing to remember what they have
already done.
Four methods of sequence control are given
training requirements.
A
software engineering tool should limit the use of the
dialogs that require high amounts of user training.
graphics tool, but limiting the
make
in Figure 9 with their relative
This can not be avoided in a
number of commands
the user needs to
know can
the system easier to use. In a software engineering tool the interface should
allow the user to concentrate on the developing software, rather than the
developmental
tool.
This will increase the users productivity.
DIALOG TYPE
REQUIRED USER TRAINING
Question and answer
Little/none
Menu
Selection
Little/none
Command Language
High
Graphic Interaction
High
Figure
The expert
9.
Sequence Control Dialogs
interface will insure that the user
order to produce the needed prototype component.
must "know"
all
is
placed in the proper tool in
Additionally, this interface
the aspects of the developing software, so that the consistency of
data entered in the different tools can be maintained.
21
The syntax and semantics of
PSDL
are an important part of this intelligent interface. This enables the interface
to insure a valid
protot>pe.
Data Entry.
2.
Many
entry.
PSDL
of the
Once again
same
principles that applied to sequence control apply to data
the system should try to limit the
number
of input actions
required by the user and also reduce the memor>' load on the user.
In order to provide the
most
efficient
form of data
entry, the interface
designers should consider textual, system driven and graphical inputs. Regardless
of the method, there are
some underlying
qualities that
any interface should
provide.
Data should only be entered once and the system should be able to access
this
information wherever
it
is
needed.
The user should not be asked
to reenter
information that was already input.
Feedback should be provided during data
entry. This includes displaying
keyed entries character by character and giving an indication of mouse-down and
mouse-up events
in a graphics tool.
Data entry should be user paced. The system should not run away from a
novice user, but
at the
same time
it
should be able to accommodate the speed of
expert users.
3.
Data Entry Methods.
The
interface.
three data entry
It is
When
methods described above
When
have a place in the
important to choose the proper method for a particular task.
a
program
is
being developed the naming of elements and the
description of arithmetic expressions are two tasks that
input.
all
possible, this input should be
22
seem
done with the
best suited for textual
aid of a syntax directed
editor such as the Cornell
Program Synthesizer. This system allows
the user to
enter information without the frustrating syntactic details normally encountered.
This can be a tremendous help
when
of the programming language.
Graphical data entry
graphic technology
form
top
faster
it
is
is
not ver}' familiar with the
grammar
[Ref. 11]
a very important area.
is
With recent advances
in
possible for the user to enter information in a pictorial
and more concisely than
down refinement
the user
is
possible in textual only environments.
of a software system
is
a logical use of graphic editing.
The
The
decomposition from one level into many lower level components can be easily
represented by the
human mind
that people prefer pictures over
entry
is
final
method of
data flow diagram. In general,
words
desirable for this purpose.
The
in a
in a
is
152]
through the use of questions and response
system driven interface. This system asks the user questions and takes different
actions based on the response of the user. Although this
it
can be stated
for describing structures, so graphical data
[Ref. 12: p.
interface
it
has
its
place in the user interface
when
method
is
the users cannot be given
more
restrictive,
freedom
to enter
anything they want. At the cost of flexibility, the user can be guided to enter only
information that
is valid.
User interface design
is
more than
just providing a
method
information from user to machine and back. The overriding factor
is
to get the
keeping the
user in control and this control should only be limited in situations where possible
errors
would
greatly degrade the system.
23
DESIGN OF THE USER INTERFACE.
III.
In
Chapter
II,
CAPS was
introduced and discussed as a group of individual
In this chapter, the design of an interface that links these tools
components.
together into a single software engineering tool will be described.
The design of
the interface includes the specification of the inputs and outputs of the individual
components
as well as a complete description of the previously undefined design
database.
The
interfaces involved in the the construction, execution and
debugging/modification of the prototype will be described.
introduction to the
A.
Bourne Shell
Scripts of the
However, a
Unix^ operating system
is
brief
necessary.
BOURNE SHELL SCRIPTS AND UNIX OPERATING SYSTEM
The Bourne
Shell Script
is
a
in a single file called a script.
way
to
perform a
The Bourne
if-then-else logic, case statements,
of Unix
set
commands
contained
Shell provides string-valued variables,
and for and while loops.
In short, all the
constructs required to control the operation of the system are available. Within the
shell, all
Unix commands can be
environment [Ref.
many
they
13].
utilized, thus
providing a very powerful control
The Unix System allows
written in different languages.
become executable Unix
Writing the interface
in the
system components.
An
files
Once
and
for a collection of different tools,
the individual programs are compiled,
their source is transparent to the system.
Bourne Shell allowed
it
additional benefit of the
to
be on a higher level than the
Unix system
is
the ability to
communicate with separate system components with the Unix argument and
2
UNIX
is
a trademark of
AT&T Bell Laboratories.
24
the
shared Unix
in the
files.
Any
function required by the user interface could be performed
Unix environment.
PROTOTYPE CONSTRUCTION
B.
The Design Database (DDB), Software Base (SB), Graphic Editor (GE),
Syntax Directed Editor (SDE), and the Rewrite System are utilized
construction of the
PSDL
prototype.
A description
in
the
of the interface and function of
each of these components as well as the function of the user interface
in the
coordination of the construction effort will be presented.
1.
The Design Database.
The Design Database
development of the
PSDL
is
hierarchical
a
program. This structure
storage structure for the
is
a
multiway
tree with
each
node containing:
•
PSDL
PSDL
•
Graphic Record
•
PSDL
•
Specification part
Implementation part (Graph or
(if
implementation
Control Constraints part
The Specification
(if
is
Ada®)
Graph)
implementation
Graph).
part can be further divided to obtain the various
elements of the specification. In particular,
inputs, outputs, states, and
is
MET individually.
it
can be broken into operator name,
The Implementation
part consists of
the link statements produced in the Graphic Editor or written or retrieved
code.
to
The Graphic Record
is
the data used only by the Graphic Editor that
Ada®
is
used
redraw the data flow diagram.
Each
operator.
level of the tree
The database
is
is
produced by the decomposition of the parent
able to recognize the relation of parent and child. This
allows queries of the type find child and find parent, as well as a search by operator
25
name. Finally the
DDB
order to produce the
DDB
The
must be able
PSDL
program.
inputs are:
GE)
Graphic Record (from
PSDL
PSDL
PSDL
Implementation (Graph or
Ada®)
Control Constraints
Specification
Commands
The
complete
to traverse the entire tree in a breadth first
(from UI).
DDB
PSDL
outputs are the
same
as the inputs with the addition of the
program.
The following operations were designed
to
enable the
DDB
to aid in the
construction and modification of the prototype.
•
Create Root Node.
This operation allows for the creation of a tree of
operators in the database.
•
Create Child Node. This operation creates a new node for information
storage and sets the parent-child relationship between this new node and its
parent.
•
Store Property.
This operation stores a PSDL Dart (Specification,
Implementation or Control Constraints), subpart ((operator Name, Input
List, Output List, State List or Maximum Execution Time), or Grapnic
record in the
•
•
Get Property.
This operation retrieves these same properties from the
Get Children.
This operation returns the names of
named
•
•
named node.
all
DDB.
the children of the
operator.
Delete Node. This operator removes the named operator from the DDB.
Because of the hierarchical nature of the DDB, this operation will effectively
remove the entire subtree that is rooted at the named operator.
Traverse Tree.
DDB
This operation
that collects the
performs a breadth-first traversal of the
into a single program.
PSDL components
26
2.
The Graphic Editor
The Graphic Editor
(DFD).
is
It is
the part of
is
CAPS
where most of
done. The decomposition of a
the actual creation of the
drawing data flow diagrams
a graphics tool for
PSDL
the input of the prototyf>e descroption
Operator into lower level operators defines
new nodes
in the tree structure.
The
operators and data streams are entered here.
GE can
also
show
the
DFD
all
editor insures a valid
decomposition by checking the consistency of inputs, outputs,
execution times. The
The names of
states
and
maximum
of the parent operator to aid the
user in retaining the place of a single operator in the prototype [Ref. 14].
Inputs to the
its
maximum
GE
include operators name, input, output, and state
execution time.
The outputs from
the
GE
are the
statements and the Graphic Record. The operations performed by the
lists
PSDL
GE
and
link
include
drawing operators data streams, inputs, and outputs showing parent DFD, and
loading and storing the Graphic Record.
3.
The Syntax Directed Editor.
The Syntax Directed Editor produces
syntax checks existing
PSDL
specifications and produces
Input to the
its
output
4.
is
SDE
is
The
files.
PSDL
SDE reads
PSDL
and
partial
PSDL
specifications produced in the
UI and
in
and completes
Control Constraints.
the partial
syntactically correct
syntactically correct
PSDL
PSDL
specification and control constraints.
The Software Base
The Software Base of reusable Ada® modules has two
module and
a maintenance module.
The maintenance module
creation and upkeep of the database.
query
involved with the
All records must be stored by
specification so that they can later be searched
27
is
parts; a
PSDL
by the same specification. Although
this part of the
system
is
not utilized in the construction of the prototype,
it
should
enjoy the same interface as the query module. [Ref. 15]
The
one or more
5.
module receives
quer>'
Ada®
modules
The User
The user
the
PSDL
meet those
that
specification part and returns zero,
specifications.
Interface.
interface has
two main functions during the construction of the
prototype; sequence control of the construction effort, and the insurance of
The sequence
continuity of the level-to-level decomposition of the operators.
control
is
performed by
utilizing the if-then-else logic of the
consistency of the decomposition
In the
is
Bourne
Shell.
The
harder to achieve.
decomposition of an operator, a number of child operators are
produced through the use of the data flow diagram. Although
this
decomposition
can produce any number of new operators with any number of data streams
between them, the inputs and outputs of the system of child operators must be
exactly the
same
as those of the parent.
reading in an input and output
outputs and
that the
if all
The
GE
will not allow
is
any other inputs or
maximum
not valid. Additionally the Graphic Editor can check to
execution time for any of the children does not exceed
that of the parent.
Finally, a state variable in a child
decomposition as a
self
must also
exist in the
components, ape, bee,
shown
in
DFD
loop or a intemal connection between two operators.
Figure 10 shows the decomposition of the operator top into
operator top,
insure this by
these inputs and outputs are not utilized the user will be notified
decomposition
ensure that the
list.
The Graphic Editor can
cat,
and dog. Figure 10(b)
Figure 10(a), because
28
it
is
its
lower level
a valid decomposition of the
has the same inputs and outputs (a
and
The
c).
GE
inclusion in the
would produce
PSDL
the link statements
stated, the four operators ape, bee, cat,
four child nodes of the node top in the
is
in
Figure 10(c) for
implementation.
As previously
of these operators
shown
DDB. These nodes
and dog represent the
are created, but the
known about them.
not the only thing
name
Actually the link
statements can be used to determine the inputs, outputs, names of any state
variables,
and
maximum
reads the link statements and determines
a partial specification.
The
Production of
streams.
all
specification has the
this
is in
There
PSDL
is
Interface
of the information required to produce
names but not
the types of the data
specification helps to ensure error free
prototypes by relieving the user of the need to
entered and
The User
execution times of these operators.
PSDL
remember what he has previously
keeping with the guideline that data should be entered only once.
one additional place where the User Interface creates part of the
program.
The Implementation
followed by a Data Stream
List.
This
part of
in the
statements.
To complete
consists of link statements
consists of the internal data streams that
list
DFD. The UI appends
were drawn
PSDL
the
DataStream List
the Implementation part of the
each of these data streams must be added
in the
to the
PSDL
end of the link
operator, the type of
SDE.
Sequence Control.
6.
The construct module
consists of a loop that continues while there are
nodes
in the
DDB
without an implementation part. The
found
in the
DDB
and
match
is
its
found, that node
specification
is
is
29
incomplete node
used to search the Software Base.
considered atomic and the
implementation section of that operator.
first
If there is
Ada®
code
is
is
If a
placed in the
no match the user
is
asked
to
75
ms
(a)
10
ms
state
20 ms
10
(b)
a.EXTERNAL-->ape
ab.ape:10ms-->bee
ac.ape:10ms-->cat
bc.bee:20ms-->cat
b.cat:30ms-->EXTERNAL
state. cat:30ms-->cat
cd.cat:30ms-->dog
dc.dog:10ms-->cat
(c)
Figure
10.
Operator Decomposition
30
ms
either
decompose
operator
or write the
again atomic and the
is
Finally, if the user chooses to
the
DFD
Ada®
is
implementation.
Ada®
in the
hand coding
is
done, this
code becomes the implementation
decompose
the operator, the Graphic Editor
part.
draws
and produces the link statements. The User Interface reads these link
statements and writes the partial specification for
nodes
If
DDB
are created for each
then called to complete the
PSDL
new
all
newly created operators.
The Syntax
operator.
New
directed editor
is
for the original composite operator.
The construct loop ends when
During the creation of a prototype,
all
leaf
a rapid
nodes of the
growth
in the
DDB
number
are atomic.
of nodes
is
Eventually the
Ada®
implementation for more of the lower level operators would be found in the
SB and
expected, as the high level operators are decomposed.
the growth of the tree
would
stop.
The construction process deals only with the production of operators.
New
data streams are produced in each operator.
If these data
streams are not
atomic they must be defined in PSDL. All user defined data streams (ds) would
appear outside the tree of operators on a level
operator.
Exceptions (ex) would also appear
global type definition in Pascal.
in the
DDB
at this level,
equal to the root
which
is
Figure 11 illustrates this structure.
similar to a
The
tree of
operators contains both composite operators (co) and atomic operators (ao).
C.
PROTOTYPE EXECUTION
Protot>T)e execution utilizes the Translator (TR), Static Scheduler (SS), and
Dynamic Scheduler (DS)
to
produce an executable prototype
the design and requirements of the actual system.
31
in
Ada®,
that
can
test
/
/
co3
co2
\
\
^\\
\
/
\
\
ao4
ao3
co4
ao2
• • •
|ex1
^"^
\
col
ao1
ds2
ds1
root
^
ao5
DO 5
(
S
\
/ \
/
ao6
\
ao7
Figure 11. Conceptual
1.
\
ao9
ao8
DDB
Structure
The Translator
The
taking the
translator in
Ada®
CAPS
translates the
PSDL
into
Ada®. This
is
done by
implementation of the atomic operators and adding the control
constraints of the composite operators to produce a group of loosely coupled
Ada®
modules. [Ref. 16]
The
breadth
2.
first
input to the translator
traversal of the
The
The
is
the
DDB. The
PSDL program
output
is
that
was produced
the package of
Ada®
in the
modules.
Static Scheduler
Static Scheduler
can be produced.
If
it is
produces a schedule of time
crirical operators, if
one
impossible to produce a valid schedule because of the
timing constraints set in the construction of the prototype, the user will be notified
by the Debugger. This process will be described
section.
32
in the
debugging and modification
3.
The Dynamic Scheduler
The Dynamic Scheduler produces
a
dynamic version of the
static
that includes a schedule of time critical operators, a collection of
operators and an exception handler that
adds the ability to run non-time
is
the debugger.
critical operators in
schedule
non
critical
The Dynamic Scheduler
conjunction with the
static
schedule.
The produced dynamic schedule
tasks and the exception handler.
The higher
it
is
falls
behind
its
and the debugger will be
To
that consists of
it
reaches a designated milestone in
amount of excess
time schedule
at
two
priority task is the schedule of time
ahead of schedule the secondary task, (non-time
operators) will be executed for the
prototype
Ada® program
a
This task will execute until
critical operators.
the schedule, if
is
time.
critical
In the event that the
any milestone, an exception will be raised
started.
aid in debugging, a trace and a graphical representation of the
executing prototype are planned. The trace will
the time that
it is
entered.
This information
performance of the prototype
is
the
list
is critical
name
when
of the operator and
the actual real-time
The run time
being evaluated.
status of the
prototype could be displayed by presenting the user with a tree that represents the
nodes of the
DDB. The node on
the frontier of the tree that corresponds to the
operator currently executing would be highlighted.
ability to
4.
This would give the user the
watch the actual execution of the prototype.
Sequence Control.
The Translator and
Static
Scheduler
may be executed
simultaneously in a multitasking environment.
produced and a non-time
any order, or
After the Static Schedule
critical operators identified, these
33
in
is
operators must be
grouped
package for use
in a
compiled and used
in
in the
Dynamic Scheduler. The Translator output
is
both the Static Schedule and the non-time critical package.
These two packages then become part of the Dynamic Schedule, which must be
compiled and linked before
it is
executed.
PROTOTYPE DEBUGGING AND MODIFICATION.
D.
The debugging of
the prototype takes place during the execution of the Static
Scheduler, while the static schedule
the
dynamic schedule of
being produced, and during the execution of
the prototype.
parts because exceptions caused
many
is
by
static
The Debugger must be broken
problems
arise before compilation,
two
while
of the dynamic timing problems of a real-time system will not occur until the
prototype has been compiled and
is
executing. [Ref. 17]
The Debugger.
1.
The Debugger has two methods of
The
into
first is
correcting problems in the prototype.
through direct user interaction with the prototype and the second
is
through the Syntax Directed Editor and the Graphical Editor in the modification
mode
.
The Debugger gives
the user a chance to
make
small changes to the
prototype in the ESS. This allows rapid feedback as to the results of the change.
The problem with
The only way
2.
to
this
make
method of modification,
that these
a permanent change to the prototype
changes are temporary.
is
with the
SDE
or
GE.
Modifying the Prototypes.
There are many problems involved
modification of a
PSDL
prototype.
in
implementing the
facilities for the
These problems stem from the
operators in the hierarchical structure of the
down.
is
In addition there are both graphical
34
DDB
fact that
inherit information both
up and
and textual views of an operator. These
A
views actually hold different versions of the same information.
view requires a change
If
an operator
deleted the simple solution
is
This action
should record a historical version of the prototype
was an improper choice,
that this deletion
A
deletion
would
this
is
The addition of
entered.
added
to the
DDB
very severe and the
at this time.
a
new
operator
DFD
it is
later
DFD
is first
new
shown
mode
subtree
is
(and link
defined.
as simple as a deletion.
is
DDB
version of the prototype could be
and the construction
tree
both deletetion and insertion the
changes
If
also require the modification of the
Construction continues until the
reflect the
to delete the entire
is
statements) of the parent operator, where the deleted operator
is
one
in the other.
subtree that has that operator as a root.
operator
in
Modifying an Operator.
a.
restored.
change
The new
of the user interface
is
completely defined. In
of the parent operator must be modified to
in its subtree.
The most
significant
problem
in
modifying an operator occurs when
small changes in the specifications or control constraints of an operator are made.
A
change
Equally as
in the specification
could cause changes in every node of
likely, a specification
complex operator
if
change could cause an atomic operator
the search of the software base
search on modified specifications
may
yield a
it
at
a child node
may cause
for the decomposition of the parent.
35
it
to
become
a
that
was not previously
with an atomic operator.
This level-to-level consistency problem can
Also a change
to
subtree.
no longer yields a match. The
match
obtainable, therefor deleting a subtree and replacing
its
move up
the tree as well.
be different from the node required
b.
Consistency of Views.
A
change of a textual component of
graphic representation.
An example
the implementation section of a
is
name
the
PSDL
PSDL may
be carried over to the
of a data stream, that
operator,
is
must be reflected
changed
in
in the link
statement and also in the graphic record.
The graphical view of
a
change might be the best indication of the
problems caused by deletions or changes. More
prototype modification,
if
present in the construction
E.
same assurances of
the
mode
effort is required in the area of
PSDL
valid
prototypes that are
are expected during modification.
TOP LEVEL USERS MANUAL
The top
level users
manual contains the four commands;
execute and modify. This section describes these
when
the user will be in
for each system
1.
these
commands
commands and
are executed.
component, particularly the
The
SDE and GE,
caps, construct,
the environment
individual user manual
should also be consulted.
The Caps Command.
The caps command
the user interface portion of
three remaining
is
how
the user initiates
CAPS. From
CAPS
this point the
and
it
places the user in
user can initiate one of the
commands.
caps <newj)roto_name>
The
optional argument contains the
constructed. If the
If the
argument
DDB
is
this
name
will
not used and the
DDB
is
is
Enter the root node name
root node.
When
construction
mode
name
the
empty,
.
The response
DDB
is
empty
as the execution
of a
new
be used
prototype that
to create a
new
is to
root node.
empty, the user will be asked
to this
to
query will be used to create the
the user will always be placed in the
and modification modes would not apply.
36
be
The Construct Command.
2.
The construct command
mode
In this
the user
is
is
used
directed into the
to place the user in the construction
SDE
and
GE
to create the
mode.
PSDL program.
construct
This
command
will place the user in the location
The process
construction can begin or continue.
production of a complete and valid
the
SDE
and
these tools
retrieval of
GE
when
PSDL
is
where the
directed by the
UI
PSDL
to insure the
program. The particular aspects of both
users manuals should be reviewed in order to properly utilize
they are called.
components
in the
The search of
DDB,
the Software Base, the storage and
and the semantic checking of the UI are
all
transparent to the user.
The user
is
advised of the results of the software search and the completion
of the construction with the below dialogs.
•
Software Search Complete - no match found. This notifies the user that the
search for an Ada® implementation for the given specification was
unsuccessful. This would be followed by the question: Do you want to
decompose, y or n. Based on the response the user will be placed in the GE or
Ada®
editor.
•
implementation found. This indicates a
Software Search Complete successful retrieval of an Ada® implementation. The user is then asked to
choose the next operator for implementation.
•
Select the next operator for implementation. This dialog presents the user
with a list of incomplete operators. The user then enters the name of the
desired operator.
This question will follow the completion of any
implementation.
•
Construction Complete. This message indicates the completion of the PSDL
prototype. The user is then placed in the UI portion of CAPS where
execution or modification can be selected.
3.
The Execute Command.
The execute command places
where the constructed prototype
is
the user in the Execution Support
executed
37
to test the real-time
System
performance.
execute
This
command
one does not exist the user
is
When
placed back in the UI.
Static
checks for the existence of a completed prototype.
first
warned,
No Completed
a complete prototype
is
If
Prototype Available, and
available, the Translator,
Scheduler and Dynamic Scheduler called in succession. The use of these
components, as well as the
The user
is
Ada®
compiler and linker,
informed of the status within the
ESS
is
transparent to the user.
with the below messages.
Translation Complete.
Static Scheduler Complete.
Dynamic Scheduler Complete.
Compilation Complete.
Linking Complete.
Execution Complete.
In the event of a
problem
in the scheduling or execution of the prototype,
the user will be notified by the Debugger.
temporary corrections
to the
All permanent changes
the modify
the
users manual for the
make
through the use of
Debugger should be consulted
for
dialogs.
The Modify Command.
The modify command
is
in the appropriate editor
form of any commands, messages and
4.
the option to
prototype in an attempt to achieve proper execution.
must be made
command. The
The user has
is
placed in the modification
used to
mode
make changes
to the prototype.
that insures that all
consistently throughout the various levels in the
The user
changes are made
DDB.
modify
This
modified.
command
asks the user to Enter the
The user must then
call the
SDE
38
or
GE
to
name of the Operator
make
to
be
the required change to
the operator.
The UI
insures that the appropriate changes are
and lower levels of the
will arise as these
F.
out.
Depending on
to enter the construction
The design of
this area
in the higher
user will be asked to resolve the questions that
changes are carried
might be required
prototype.
DDB. The
made
of
CAPS
is
mode
to
the
changes made the user
complete the modified
not complete.
EVOLUTION OF THE USER INTERFACE.
The
current design of
CAPS
is in
an evolutionary stage.
As CAPS changes
design of the User Interface must change to keep the system performing.
present time, only a part of the total system has been implemented.
functions of
CAPS
are
implemented changes
39
to the interface will
the
At the
As more of the
be required.
IMPLEMENTATION OF THE USER INTERFACE.
IV.
The user
components of
the
implemented since
interface has not been completely
CAPS
all
of the
have not been implemented. The link statement analyzer of
UI has been implemented and
have been tested and proved
is
described here. The means of sequence control
be feasible for use
to
in the
implementation of the
This chapter will outline the implementation of the link analyzer as well
interface.
as a plan for the implementation for the
remainder of the User Interface and the
Dynamic Scheduler.
A.
THE LINK STATEMENT ANALYZER.
The
link statement analyzer
specification for the
is
called
nodes because
newly created operators and
is
used
it
writes the partial
to create
new nodes
in the
DDB.
The program was
written in Pascal, because that
familiar to the author. Berkley Pascal
system,
it
was used because,
can run on the Sun Workstation®
The declaration
structure that
is
section of nodes. p
used.
operators are stored in the linked
list
3
its
two end
points.
Sun Workstation®
is
remainder of the
in Figure
12 describes the storage
link statements are parsed
and the
of operators. Within a given operator a
inputs, outputs, and states as well as the
operator as
like the
and the Unix Operating System.
shown
program the
In this
State variables are determined
^
was the language most
Maximum
list
of
Execution Time are stored.
by the existence of a data stream with the same
Graphically this would appear as a self loop. There
a registered trademark of
40
Sun Microsystems,
Inc.
list
of internal data streams collected for inclusion in the Implementation section of
the parent operator.
The storage
structure is built
up as each link statement
is
read
in succession.
program CreateNodes
(input, output);
(* Global Constants *)
const
period =
colon =
':';
arrow =
blank =
'.';
'-';
•
';
EXTERNAL = EXTERNAL
(*
72 blanks
*)
type
= packed array
=
DataPti
^DataType;
DataType = record
Name: stringSO;
stringSO
[0..79] of char;
(*
Node
for
Linked List of Nodes
*)
Link: DataPtr;
end; (* DataType *)
OperPtr = Operator;
Operator = record
OpName:
(*
Node
(*
Head Pointer
of Linked List of Operators *)
(* Operator Name *)
stringSO;
InputList: DataPtr;
to Input List *)
InListTail: DataPtr;
(* Tail Pointer to Input List *)
OutputList: DataPtr;
(*
Head
Pointer to Output List *)
Output List
OutListTail: DataPtr;
(* Tail Pointer to
StateList: DataPtr;
(*
StateListTail: DataPtr;
(* Tail Pointer to State List *)
Execution Time *)
( *
MET:
Head
Maximum
StringSO;
Link: OperPtr;
end; (* Operator *)
var
OpHead: OperPtr;
(*
OpTail: OperPtr;
(* Tail of Operator List *)
DataHead: DataPtr;
(*
DataTail: DataPtr;
(* Tail of
Head of Operator List
Head of Data List
Data List
*)
*)
Figure 12. Declaration Section of Nodes.p
41
*)
Pointer to State List *)
*)
After the link statements are read into the data structure, specification parts for
each
new node
create neu' nodes in the
command.
be used to
with each
file
being the input for the create
new node
In addition to creating the child nodes, the
PSDL implementation
consists of
DDB,
all
new
state variables.
section for the parent
These
files will
are written into dynamically created files.
node
is
Data Stream part of the
produced. This data stream
internal data streams created in the decompositions that are not
The
creation of both a child node and the Data Stream
nodes. p are illustrated in Figure 13. This figure illustrates
that
were produced
in the
partial specification of the
GE
Nodes. p
is
to
how
(Figure 13(a)) are used by the
is
in
UI
to
produce the
13(b)).
The
entire
shown
in
Appendix D. All of the semantic
PSDL
is
included in the nodes. p program.
produce proper
included as an important part of the construction subsystem.
ab.ape:10s->bee
ac.ape:10s-->cat
bc.bee:20s-->cat
c.cat:30s-->EXTERNAL
state.cat:30s-->cat
cd.cat:30s-->dog
a.EXTERNAL-->ape
dc.dog:10s->cat
(a)
NewNode.Ol
OPERATOR ape
SPECIFICATION
INPUT a
OUTPUT ab
ac
MAXIMUM EXECUTION TIME
list
the link statements
newly defined operator, ape, (Figure
input and output of this example
checking required
list
10s
(b)
Figure 13. Input and Output of Nodes.p
42
SEQUENCE CONTROL
B.
The Sequence Control of
THE USER INTERFACE.
IN
the construction and execution subsystems has been
designed and tested. Complete implementation can be started
of
CAPS
the elements
are operating.
The goal of
the construction subsystem
is
the production of the
DDB
operator must be written and the root node in the
createRootNode command. This command
command
the user types the
subsystem
caps.
DDB
to the
are fully defined.
called node.list.
When new
empty
is
s node.list
do
The
will
first
specification.
is
a loop that
The user
executed by the UI when
is
met
the construction
interface maintains a
is
this function in the
name on
second.
The
invoked
to
DDB
list
name
removed from
Bourne
is
is
all
the elements
of nodes in a
added
the
list.
list.
When
this
the completion of the
command
the first line in the file ddb.in and the
name
places the operator's specification in the
file
is
from the
Base by placing
it
This specification
in the file psdl.spec
is
DDB
specification on the
ddb.out.
The SDE
is
is
called
then sent to the Software
and then executing the
43
PSDL
executed with the
complete and syntactically check the specification. This editor
ddb.out.
test-
Shell.
this the partial specification is retrieved
command SDE
file
to this
The command: while
complete.
step in the construction
To do
executed until
operators are created, their
the prototype
perform
is
through the use of the getProperty command. This
with the
is
After this requirement
these operators are fully defined, they are
node.list
DDB
created with the
entered.
is
The prototype construction
operators
PSDL
Before the construction process can begin the specification of the root
prototype.
As
all
Implementation of the Construction Subsystem.
1.
of the
when
file
Software _Base.
response
to the query' is
empty, otherwise the
Ada®
The command
been found.
If
it
read from the
code
test-s
has, the
do
added followed by the retrieved
a
If there is
is
no match, the
used by the UI to determine
code will be appended
PSDL comment. To
form of a
SB_out.
file is
is in this file.
SB_out
Ada®
file
this, the
Ada®
words
to the
Ada®
code which
is
if
a
match has
Implementation
in the
and the operator name are
surrounded by the brackets of
PSDL comment.
If
no match
decompose
tested.
the
code
the
DDB
found
A
the operator.
When
in the
software search, the user
is
asked
if
they want to
string-valued variable containing the users response
is
the response is negative, the user is placed in an editor, currently vi,
Ada®
where the
is
implementation
that is retrieved
with the
is
written.
The Ada® code
is
handled the same as
from the Software Base. The implementation
command
storeProperty with the operator
is
stored in
name followed by
the
Implementation section placed in ddb.in.
When
the user wishes to
data flow diagram and
given the
are
files
made from
its
decompose, the Graphic Editor
is
called and the
corresponding link statements are produced. The
GE
is
graph.name, graph.in, graph.out, graph.state and graph.met which
data retrieved from the specification part of
PSDL. The GE
outputs
graph.link and graph.pic are the link statements and graphical record respectively.
Graph.pic
is
also an input, but
The user interface
it
will
be empty unless a
DFD already exists.
creates graph.name, graph.in, graph.out, graph.state, and
graph.met by getting the specification part of the node as described above, scanning
for the information and writing
and graph.link are produced
DDB
it
in the appropriate file.
in the
by writing the key words
The output
GE. The implementation
section
files
is
graph.pic
stored in the
IMPLEMENTATION and GRAPH to the file ddb.in
44
p
ddb.in and then concatenating the
files
then stored using the storeProperty
While reading
needed
dynamically produce
of
new
executing the
it.
The
file dcih.in is
command.
the link statements to determine the internal data streams
produce psdl.ds the new nodes are
to
number
graph.link and psdl.ds to
files
named NewNode.OJ
identified.
to
operators in the decomposition.
command createChildNode
The program nodes.
NewNodeXX
depending on the
The new nodes
NewNode
for each
file.
To execute
createChildNode, ddb.in must have the name of the new node on the
followed by the
name of
the parent
node and then the
by
are created
partial specification
first line
produced
by the link analyzer.
The loop
being
all
executed
is
nodes are
traverse
first traversal
is
executed. With the
of the
concatenated to the
DDB
file.
to the file psdl for use
by
is
This
the
name of the
performed and the
PSDL
complete when the
root node in ddb.in
PSDL
,
a breadth
for each operator
specification for the entire prototype
is
is
moved
Implementation of the Execution Support System.
System involves
the
Dynamic Scheduler, and
the
piped to the executable
file
the Execution Support
coordination of the Translator, Static Scheduler,
compiler and linker as well.
To execute
translator. This
that
is
Execution Support System.
The implementation of
Ada®
nodes
fully described with the leaf
atomic operators. The construction of the prototype
command
2.
until all
a prototype, the file psdl
is first
program generates a package of loosely coupled
Ada® components
each represent one of the leaf nodes of the prototype. This package
TL.a and
is
used by both the Static and Dynamic Schedules.
45
is
called
The
Static
Schedule
is
produced by executing the
preprocessor called psdl_reader with psdl piped as
psdl_reader, called operator. info,
Static _Scheduler.
A
output.
The
is
input.
its
attribute
The output
grammar
file
from
the input to the next program, called
Static _Scheduler produces a static scheduler, SS.a, as
secondary output of the Static_Scheduler
is
the
list
of non-time
its
critical
operator NTC.out.
Both SS.a and NTC.out are used by the Dynamic Scheduler
executable schedule called DS.a. This output schedule, which
must be compiled and linked before execution.
name
of the executable prototype code
is
is
to
produce an
written in
Ada®,
After schedule completion, the
changed
to
be the same as the root
operator.
Implementation of Debugging and Modification.
3.
The debugger,
as previously described, is broken into
two
Scheduler debugger and the executing prototype debugger.
embedded
in the
Execution Support System although
it is
parts; the Static
Both parts are
not part of the execution
of the prototype. If the debugger gets direct input from the user this information
used to
try to
keep the prototype executing.
the debugger writes the error
read
it
and attempt
to
message
is
the
problems become too large
into the file information
where the user can
modify the prototype.
The modification process
DDB
When
is
equipped with
all
is
not completely defined at this time, but the
the operations that should be required. In addition to the
operations that were previously discussed in the construction of the prototype,
there are the getParent and getChildren
the deletNode
command
for the
commands
for
moving around
removal of unneeded operators.
46
the tree and
The getParent command
The name of
wherever
output
is
that
is
it
the
nodes parent
needed. The
list
is
called with the
command
is
getChildren
placed in the
The deletNode command simply
entire subtree
of the
DDB
C.
ddb.in and
in
its
will require that a historical version
is
defined, additional operators
EXAMPLE BOURNE SHELL SCRIPTS
commands
that
implemented
at the
The
in the
list
in the
mode
is illustrated in
is
of incomplete operators to the user,
>>
ddb.in
DDB
These
was not
is
places the
who
file
getChoice. This
file
displays
The command
cat choice
of the choice operator and the
keyword
SPECIFICATION, found
in the file
getProperty
to retrieve the specification
uses ddb.in
is
then selects the next operator for
stored in the file choice.
name
Figure 14. This script
empty, signifying a complete prototype.
loop calls the executable
implementation. The choice
spec
UL
Script.
script for the construct
command
illustrate the
sequence control of the
and have not been tested because the
a loop that executes until the file node. list
first
mode
time of this writing.
The Construct
1.
Shell scripts of the construct
have been tested for use
scripts are not complete,
the
node named
subsystem will be required.
the construction
The following example Bourne
The
very similar except that the
ddb.out.
file
be saved. As the modification process
from
is
deletes the
from the DDB. This command
in the various tools
in ddh.in.
placed in standard output and can be piped to
is
of child nodes and
known nodes name
spec, in the
DDB.
47
file
ddb.in.
The command
of the operator from the
while
node. list do
test-s
getChoice
ddb.in
cat choice spec
getProperty
SDE ddb.out
mv ddb.out psdl.spec
»
» temp
cat ddb.in psdl.spec
mv temp ddb.in
storeProperty
Software_Base
if test-s SB_out then
echo "Software Search Complete
addlmpl
-
implementation found"
else
echo "Software Search Complete - no match found"
echo "Do you want to decompose, y or n."
read x
if test
$x = y then
GE
else
adaEditor
addAdalmpl
fi
fi
done
echo "Construction Complete"
Figure 14. Construct Script
The output from
the
DDB,
completed and syntax checked. The
file
psdl.spec, which
commands
create
SPECIFICATION
is
file is
the file
it
moved with
and the completed specification
search of the
would
sent to the
fail
SDE, where
mv command
the
SB
The next
it
is
to the
three
temp with the operator's name, the keyword
command
is
initiated
results of the search are placed in the file
empty and
then
is
the input file for the Software Base.
ddb.in where the storeProperty
The
ddb.out,
the test-s
stores
in the
it.
This
file is
moved
to
DDB.
by the command Software _Base. The
SB
command.
48
it
in
out.
If there is
If there is
no match
this file is
an implementation in the
file,
the user
is
message "Software Search Complete
notified with the
implementation found", and the executable program makelmpl
program creates
a
PSDL
IMPLEMENTATION
This
called.
is
-
implementation section by placing the keywords
and Ada
in the file ddb.in.
The operator name and
PSDL comment
retrieved code, surrounded by the brackets ({}) of a
the
are
concatenated to complete ddb.in.
no implementation
If
command
"y" the
found
"Software Search Complete
decompose, y or n"
is
is
GE
is
The
.
K the user does
SB, the user
script for the
is
Ada®
notified with the
read into the variable x
GE is demonstrated
not want to decompose, the
by addAdalmpl which adds the
is
no match found" and asked "Do you want
response
user's
The
called.
-
in the
Ada®
implementation
the response
in the next section.
editor
to the
if
to
called followed
is
PSDL
operator just as
addlmpl does.
When
prototype
is
node.list is empty,
complete.
The user
all
is
the operators are completely defined,
notified with the
command
"
and the
Construction
Complete".
2.
The Graphic Editor
The
GE
script,
The primary purpose of
shown
Script.
the
in Figure 15, is
GE
embedded
script is to get the inputs
Graphical Editor, and then store the outputs back in the
The executable
the proper
keywords
outputs, states and
file
getlnputs calls the
in the file ddb.in,
maximum
well as the graphic record,
if
to
in the construct script.
from the
DDB,
call the
DDB.
DDB command getProperty
retrieve the operator
,
with
name, inputs,
execution time from the operator specification, as
one was previously produced. This information
49
is
placed in the
files
graph.name, graph.in, graph.out, graph.states, graph.met, and
graph.pic respectively. These
files are the
The command graph puts
inputs to the
the user in the editor
where the
The outputs of
the decomposition of the operator are produced.
graphic record graph.pic and the link statements in the
is
GE.
file
DFD
the
GE
that defines
are the
new
graph.link. Graph.link
piped to the link analyzer nodes, where the partial specification of the newly
defined nodes and the data stream
list
are created.
get_inputs
graph
nodes < graph. links
cat graph. links psdl.ds
»
psdl.imp
»
ddb.in
cat choice Imp Graph psdl.imp
SDE ddb.in
storeProperty
ddb.in
cat Graphic graph.pic
StoreProperty
»
createNodes
Figure 15. Graphical Editor Script
The commands Graph.link psdl.ds
psdl.imp
>>
done by
first
»
psdl.imp and cat choice Imp Graph
ddb.in produce the implementation of a composite operator. This
combining the
IMPLEMENTATION,
operator name.
link statements
in the file
imp, and
The PSDL implementation
must add the types
and data stream
is
GRAPH
stream
list.
The keywords
added as well as the
are
then sent to the
to the data streams in the data
list.
is
SDE
where the user
The user may
also add
any optional control constraints.
The StoreProperty command
section and the graphic record.
The
cat
is
used to store both the implementation
command
for the storage.
50
in
between
sets
up the
file
ddb.in
The
last
NewNode.XX,
DFD, and
executable
command
that
were created
creates a node in the
file
createNodes takes the
in the script,
in the
DDB
UI
name and
file
operator defined in the the
ddb.in with the
the partial specification, in
command. The
new
operator name,
NewNode.XX,
for each
new
command.
operator before executing the createChildNode
D.
new
with the createChildNode
createNodes must load the
parent operator
for each
of the form:
files
FUTURE IMPLEMENTATION.
There are two aspects
first is
to the future
implementation of the User Interface. The
implementation of the designed features of the system. As the individual
components
are completely
provide
the features of the system to the user.
all
implemented the UI
will
need
to be
After
all
expanded
to
the logical
considerations of the interface are fully tested, the second part of the
implementation can begin.
The second phase
is
more
directly involved with the
Human
Factors
Engineering of the system. Presently the major considerations are what the system
does, what information
is to
be passed and which tool should be invoked next. The
follow on work should be more involved with
and received from the
via the mouse,
user.
The use of
a
how
more graphic
would be more compatible with
system.
51
the information
is
presented to
interface with a response
the primarily graphic input of the
CONCLUSIONS
V.
The goal of
CAPS
and
CAPS
from
to
this thesis
was
to
determine the requirements of a user interface for
design such an interface.
This expert interface will help transform
a collection of software engining tools, into a usable
system for rapid
prototyping.
FEASIBILITY ISSUES.
A.
The work done
in this thesis
demonstrates that a user interface that supports the
construction, execution and modification of an executable prototype can be
produced. First the requirements of interface were defined. These included data
entry, data protection,
communication between elements and sequence
control.
A
design of an interface that could support these requirements was then produced.
Key
aspects were tested and the implementation outiined.
This interface, along with the demonstration of the feasibility of most of the
components of CAPS, has shown
demonstrate that
this
embedded systems.
It
built.
The next
step is to
must be shown
minimum
that
CAPS
can construct and execute these
user training.
BENEFITS OF THE STUDY
The primary
of
system can be
prototyping effort can aide in the production of real-time
prototypes quickly with
B.
that the
benefit of the
CAPS. CAPS
work done on
the user interface
is
the
advancement
has demonstrated the potential for significant time and cost
savings in the production of these real-time system.
If the user interface
can be
powerful and friendly enough to promote the users interest in the system then
CAPS
will
be more readily used.
52
A
secondary benefit of
this research is in the area
Other software engineering tools might be able
systems.
aspects of the
CAPS
user interface.
entry and display could utilize the
the
two views. The use of
some
C.
of user interfaces for other
the
A
to utilize
some of
and textual data
tool that uses both graphical
same type of control of data consistency between
Bourne
shell scripts
might a be a useful model for
other system as well.
RECOMMENDATIONS.
There are three recommendations for the improvement of CAPS.
recommendations include the addition of two new areas of work
change
in the
The
done
in the
original design of
SDH. As
CAPS
called for the majority of the data entry to be
the system has been developed, the
DFD
operators and data streams are defined in
information from the
GE
to
produce the
is
PSDL.
partial
names data streams and
GE, and
the Xynpc
must be added
in the link statements,
would eliminate
complete the specifications and data stream
2.
in the
GE
has proven to be the
the first place
where the new
The UI already uses
specification of the
constructed operators and the data stream declaration.
Currently the
SDE. The
the
newly
GE
only
inclusion of types
the need to return to the
SDE
lists.
Prototype Modification.
A
mode
system and a
primary method of data entry.
primary tool for the entry of new data. The
in the
to the
These
Primary Data Entry.
1.
to
the
method of prototype modification must be provided.
that not only allows
assurances of valid
PSDL
changes
to the prototype, but
prototypes as the construction
53
A
modification
provides the same
mode
is
required.
Until
this
modification subsystem
is in
place, the rapid debugging of the prototype will
not be possible.
3.
Execution Monitoring.
The current design of
CAPS
Some means
execution of the prototype.
the execution of the prototype
of producing both a trace and a view of
would greatly improve the
verify the prototype's performance.
to
does not include a means of monitoring the
The
ability to trace a
one of the original requirements would aid
ability to
problem
in the validation or
debug and
in the
execution
modification of
these requirements.
D.
APPLICATION OF CAPS IN THE DEPARTMENT OF DEFENSE
AND THE DEPARTMENT OF THE NAVY.
The substantial investment in real-time embedded systems in DOD and DON
points out the tremendous need for a tool such as
executable prototype in
Ada®
that
CAPS. Since CAPS produces an
can be used to
system before coding. MIL-H-48655B
calls for
test the
design of a software
requirements analysis, functional
specification and verification before the actual coding of the system [Ref. 19].
Rapid Prototyping supports
written in
Ada®,
of real-time
so
it
All
this objective.
seems
that
CAPS
is
embedded systems
in
the tool that best supports the production
embedded systems. Although CAPS
is
not yet a complete system,
does hold promise as an important tool for software engineering in
There
tactical
is
much
interest in the rapid
existing,
method
it
DOD and DON.
development and acquisition of software for
systems in the Navy, as shown
outlines a
DOD are to be
in
OPNAVNOTE
5000. This instruction
for accelerated acquisition of tactical systems through the use of
"off the
shelf"
hardware and rapidly produced developmental
54
software [Ref. 20].
The production of
the use of a software tool like
this
software could be accelerated through
CAPS.
Rapid prototyping has demonstrated a potential
the inherent
to
be one possible solutions to
problems of producing large real-time systems with traditional
software engineering methodologies.
CAPS shows
engineering tool.
55
promise as a practical software
)
APPENDIX
A.
PSDL
GRAMMAR
= psdl
psdl = (component}
component = data_t>q>e operator
Start
i
data_t>pe = "type"id type_spec typejmpl
operator = "operator"id operator_spec operator_impl
type_spec = "specification" [type_decl] {"operator" id operator_spec
[functionality]
"end"
type_impl = "implementation" "ada" id "{"text")"
"implementation" type_name ("operator" id operator_impl} "end"
operator_spec = "specification" (interface) [functionality] "end"
operatorjmpl = "implementation" "ada" id "(" text ")"
I
I
type_decl
=
"implementation" psdl_impl
id_list ":"
functionality
type_name
= [keywords]
("," id_list ":"
type_name}
[informal_desc] [formal_desc]
psdl_impl = data_flow_diagram [streams] [timers] [control_constraints]
[informal_desc] "end"
type_name =
I
id "[" type_decl "]"
id
= attribute [reqmts_trace]
= id (","id }
keywords = "keywords" id_list
informal_desc = "description" "{" text
formal_desc = "axioms" "(" text "}"
data_flow_diagram = "graph" (link)
streams = "data stream" type_decl
timers = "timer" id_list
interface
id_list
"}"
= generic_param
attribute
input
I
output
I
states
I
exceptions
I
I
timing_info
generic_param = "generic" type_decl
input
=
"input" type_decl
= "output" type_decl
= "states" type_decl "initially"
exceptions = "exceptions" id_list
output
states
expression_list
56
}
timing_info =
["maximum execution time"
time]
["minimum calling p)eriod" time]
["maximum response time" time]
reqmts_trace = "by requirements" id_list
link = id "." id [":" time] "->" id
control_constraints = "control constraints" {constraint}
constraint = "operator" id
["triggered"
[trigger] ["if' predicate] [reqmts_trace]]
["period" time [reqmts_trace]]
["finish within" time [reqmts_trace]]
constraint_options
(
= "by
trigger
id_list
all"
"by some" id_list
constraint_options = "output" id_list "if predicate [reqmts_trace]
I
I
I
"exception" id
timer_op id
["if'
["if'
predicate] [reqmts_trace]
predicate] [reqmts_trace]
timer_op = "read timer"
"reset timer"
I
"start timer"
I
"stop timer"
I
= expression ("," expression}
=
time
integer [unit]
unit= "ms" "sec" "min" "hours"
expression = constant
expression_list
I
I
I
lid
type_name "." id
predicate = relation {bool_op
relation = simple_expression
"("
I
expression_list ")"
relation}
simple_expression rel_op simple_expression
simple_expression = [sign] integer [unit]
I
[sign] real
I
["not"] id
I
string
I
I
["not"] boolean_constant
I
booLop = "and"
rel_op
real
=
=
integer
=
"or"
"<="
"<"
I
integer
I
"."
["not"] "(" predicate ")"
">"
I
I
"="
">="
I
I
integer
digit {digit}
"false"
boolean_constant = "true"
integer
numeric_constant = real
=
boolean constant
constant
numeric
constant
I
I
I
57
":"
"/="
I
= +
char = any
digit = "0
letter = "a
II
Sign
,
11
!t
ft
-
I
printable character except "}"
9"
..
"_"
"A Z"
alpha_numeric = letter
digit
id = letter {alpha_numeric}
string =
(char)
..
z"
I
..
I
I
text
= {char}
58
APPENDIX
B.
BRAIN TUMOR TREATMENT SYSTEM
EXAMPLE
OPERATOR
Brain_tumor_treatment_system
SPECIFICATION
INPUT patient_chart:
medical_history,
treatment_switch
:
boolean
boolean
OUTPUT treatment_finished:
STATES temperature: real INITIALLY 37.0
DESCRIPTION [This is an English description
END
IMPLEMENTATION
GRAPH temperature. EXTERNAL-->
of the operator
}
hyperthermia_system
patient_chart.EXTERNAL--> hyperthermia_system
treatment_switch.EXTERNAL — > hyperthermia_system
treatment_power.hyperthennia_system — > simulated_patient
treatment_finished.hyperthermia_system --> EXTERNAL
temperature. simulated_patient -> hyperthermia_system
DATA STREAM treatment_power real
:
CONTROL CONSTRAINTS
OPERATOR hyperthermia_system
PERIOD 200 ms BY REQUIREMENTS
OPERATOR simulated_patient
PERIOD 200 ms
DESCRIPTION {some
text
about
shutdown
it}
END
OPERATOR
hyperthermia_system
SPECIFICATION
INPUT
temperature rreal,
patient_chart:medical_history,
treatment_switch: boolean
OUTPUT treatment_power:
real»
treatment_finished: boolean
MAXIMUM EXECUTION TIME
100
ms
BY REQUIREMENTS temperature.tolerance
MAXIMUM RESPONSE TIME 300 ms
BY REQUIREMENTS shutdown
KEYWORDS medicaLequipment,
temperature_control,
59
hyperthermia,
brain_tumors
DESCRIPTION
{
}
END
IMPLEMENTATION
GRAPH temperature. EXTERNAL --> start_up
temperature. EXTERNAL --> maintain
patient_chart.EXTERNAL --> start_up
treatment_switch.EXTERNAL --> safety_control
estimated_power.start_up --> safety_control
estimated_power.maintain — >safety_control
treatment_finished. maintain --> safety_control
treatment_finished.start_up --> safety_control
treatment_power.safety_control
— > EXTERNAL
DATA STREAM estimated_power: real
TIMER
treatment_time
CONTROL CONSTRAINTS
OPERATOR start_up
TRIGGERED IF -42.4 > temperature
BY REQUIREMENTS maximum_temperature
STOP TIMER treatment_time
RESET TIMER treatment_time EF temperature <=
OPERATOR maintain
TRIGGERED by all temperature, treatment_time
IF temperature
37.0
>= 42.4
BY REQUIREMENTS maximum_temperature
OUTPUT treatment_fmished IF treatment_time >= 45
BY REQUIREMENTS treatment.time
START TIMER treatment_time
BY REQUIREMENTS treatment_time,
temperature_tolerance
END
OPERATOR
start_up
SPECIFICATION
INPUT patient_chart:
medical_history,
temperature: real
OUTPUT estimated_power: real,
treatment_finished: boolean
EXCEPTIONS errl, err2, err3
BY REQUIREMENTS temperature_tolerance
60
min
DESCRIPTION
}
{
END
IMPLEMENTATION Ada
OPERATOR
start_up
maintain
SPECIFICATION
INPUT
temperature: real
OUTPUT estimated_power:
real,
treatment_finished: boolean
MAXIMUM EXECUTION TIME 90 ms
BY REQUIREMENTS
DESCRIPTION
{
temperature_tolerance
}
ENT)
IMPLEMENTATION Ada maintain
OPERATOR safety_control
SPECIFICATION
INPUT
treatment_switch,
treatment_fmished: boolean,
estimated_power: real
OUTPUT treatment_power: real
BY REQUIREMENTS shutdown
MAXIMUM EXECUTION TIME 10 ms
BY REQUIREMENTS temperature.tolerance
DESCRIPTION
{
}
END
IMPLEMENTATION Ada safety_control
OPERATOR simulated_patient
SPECIFICATION
INPUT treatment_power
OUTPUT temperature
DESCRIPTION
(
:
:
real
real
}
END
IMPLEMENTATION ADA
simulated_patient
61
APPENDIX
program CreateNodes
C.
PASCAL PROGRAM
nodes.p
(inpul,output);
(* Global Constants *)
const
period = '.';
colon = ':';
arrow =
blank =
'-';
';
'
EXTERNAL = 'EXTERNAL
(*
72 blanks
(*
Node
for
(*
Node
of Linked List of Operators *)
*)
type
= packed array
=
^DataType;
DataPtr
DataType = record
Name: stringSO;
stringSO
[0..79] of char;
Linked List of Nodes
*)
Link: DataPtr;
end; (* DataType *)
OperPtr = '^Operator;
Of>erator
= record
OpName:
Name
stringSO;
(*
Operator
InputList: DataPtr;
(*
Head
InListTail: DataPtr;
(* Tail Pointer to Input List *)
OutputList: DataPtr;
(*
Head
*)
Pointer to Input List *)
Pointer to Output List *)
Output List *)
Pointer to State List *)
OutListTail: DataPtr;
(* Tail Pointer to
StateList: DataPtr;
(*
StateListTail: DataPtr;
(* Tail Pointer to State List *)
MET:
(*
Maximum Execution Time
OpHead: OperPtr;
(*
Head of Operator
OpTail: OperPtr;
(* Tail of
DataHead: DataPtr;
(*
StringSO;
Head
*)
Link: OperPtr;
end; (* Operator *)
var
DataTail: DataPtr;
Operator List *)
Head of Data List
(* Tail of
List *)
Data
*)
List *)
C
procedure ReadToken(delimeter:char;
var token: StringSO);
(*
Reads
PSDL Link
statements from standard input, one token at *)
(* a time. Delimeters are: period, colon,
var
62
arrow and End of Line *)
;
ndx:integer;
ch: char;
begin
ndx
(* initialize *)
:= 0;
read(ch);
while (ch
o dehmeter) and
do
(not eoln)
begin
by character
token[ndx] := ch;
(* Gets token character
read(ch);
(* until delimeter or eoln *)
ndx
:=
ndx +
1
(* while*)
end;
(* Gets last character *)
eoln then token[ndx] := ch;
if
*)
if delimeter = arrow then
(* be fore
end of
line *)
begin
(*
read(ch); read(ch);
eoln then readln;
end;
rest of
arrow *)
(* if *)
end;
if
remove
(*
ReadToken
(* resets
Hne
*)
*)
-*)
(=
procedure ReadOperMet(var Operl, Met: stringSO);
(* Reads PSDL Link statements from standard input, one token at *)
(* a time. Determines Operatorl and Maximum Execution Time *)
var
ndx:integer;
ch: char;
begin
ndx
(* initialize *)
:= 0;
read(ch);
while (ch
o
colon) and (ch
o arrow) do
begin
by character
Operl [ndx] :=ch;
(* Gets token character
read(ch);
(* until delimeter or eoln *)
ndx :=ndx+
end;
1;
(* while*)
ch = colon then
begin
(*
if
ndx
end of Une
*)
:= 0;
read(ch);
while ch
o arrow do
begin
Met[ndx]
(* Gets token
:= ch;
63
by character
*)
*)
(* until delimeter or eoln *)
read(ch);
ndx
:=
1;
(* while*)
end;
end;
ndx +
(* if *)
(*
read(ch); read(ch);
end;
(*
remove
rest of
arrow
*)
ReadOperMet*)
*)
('
function OpSearch (Head: OperPtr;
Target: stringSO): OperPtr;
(* Searches Operator List for Target string, returns pointer *)
(* to target
if
found, otherwise
NIL
*)
begin
Head = nil then
OpSearch := nil
if
(*
else if Head^.OpName = Target then
OpSearch := Head
empty
(* target
list
*)
found
*)
else
OpSearch
end;
/*
OpSearch(Head^.Link, Target);
:=
_
Op Add
procedure
*\
_
(var Head: OperPtr;
varTail: Op>erPtr;
Target: stringSO);
(*
Adds new Operator
to
end of linked
list
*)
var
p: OperPtr;
(*
temp pointer
*)
empty
*)
begin
if
Head =
nil
then
(* List
is
begin
new(p);
(* Create
new head node
*)
Head
:= p;
Tail := p;
p^.OpName
:= Target;
p^.InputList :=
list
*)
nil;
p'^.OutputList :=
nil;
p^.OutListTail :=
p^.Link :=
new
nil;
p^.InListTail :=
end (*
(* Initialize
nil;
nil;
if *)
(* List not
else
empty
*)
begin
new(p);
(*
Tail'^.Link := p;
64
Add new node
after tail *)
Tail := Tail^.Link;
p^.OpName
:= Target;
(* Initialize
new
lists
*)
p^.InputList := nil;
p/^.InListTail := nil;
p^.OutputList :=
nil;
p^.OutListTail :=
p^.StateList :=
nil;
nil;
p^.StateListTail :=
p^.Link
end (* else
nil;
:= nil;
end;
*)
OpAdd
(*
*)
*)
(*
function Search (Head: DataPtr;
Target: stringSO): DataPtr;
Searches Data Listfor Target string, returns pointer *)
(* to target if found, otherwise NIL *)
begin
(*
Head =
if
nil
Search :=
else if
then
(*
nil
empty
list
*)
Head'^.Name = Target then
Search := Head
(* target
found *)
else
Search := Search(Head^.Link, Target);
end; (* Search *)
(*
*)
procedure
Add
(var Head: DataPtr;
var Tail: DataPtr;
Target: stringSO);
(*
Adds new Data
to
end of linked
lists *)
var
(*
p: DataPtr,
Temp
pointer *)
begin
if
Head =
nil
then
(* List is
empty
(* Create
new node
*)
begin
new(p);
*)
Head := p;
Tail := p;
p^.Name := Target;
p^iink := nil;
end
(* Initialize
new
lists *)
(*if*)
(* List not
else
65
empty
*)
begin
Add new node
(*
new(p);
after tail *)
Tail^.Link := p;
Tail := Tail^.Link:
p^.Name
p^.Link :=
end (* else
end;
(*
(* Initialize
:= Target;
new
lists *)
nil;
*)
OpAdd
*)
*)
(*
procedure LoadDataStructure(var OpHead, OpTail: OperPtr;
var DataHead, DataTail: DataJ^);
(* Loads tokens into Data Structures *)
var
Current: OperPtr;
(*
Data, Met: stringSO;
(*
Temp pointer *)
PSDL Tokens *)
Operl,Oper2: stringSO;
begin
Data := blank;
Operl := blank;
(* Initialize Strings *)
Met := blank;
Oper2 := blank;
while not eof do
begin
(*
Get tokens *)
ReadToken(period,Data);
ReadOperMet(Oper 1 ,Met);
ReadTokenC ',0per2);
if
Operl
o EXTERNAL
then
(*
Keyword
EXTERNAL is not
*)
(* an Operator *)
Current := OpSearch(OpHead,Operl);
if Current = nil then
begin
begin
(*
Add
Operator
1
*)
OpAdd(OpHead,OpTail,Operl);
Current := OpSearch(OpHead,Operl);
end;
(* if *)
Currenf^.MET
:=
Met;
(* Enter
Add Data to Operators Output
Operl = Oper2 then
(*
if
Maximun Execution Time
List *)
begin
if
Search(Current^.StateList,Data)
=
nil
then
Add(Current^.StateList,Current^.StateListTail,
Data);
end
else
66
*)
if
Search(CuiTent^.OutputList,Data) = nil then
Add(Currenl^.OutputList,Current^.OulLislTail,
Dam);
(* if *)
end;
Oper2
if
o EXTERNAL
then
begin
(*
Keyword
EXTERNAL
Operator
(* an
is
*)
Current := OpSearch(OpHead,Oper2);
if Current = nil then
(* Add Operator 2 *)
begin
OpAdd(OpHead,OpTail,Oper2);
Current := 0pSearch(0pHead,0per2);
(* if *)
end;
Add Data
(*
if
to
Operators Input List *)
Operl = Oper2 then
begin
if
Search(Current^.StateList,Data) =
nil
then
Add(Current^.StateList,Current^.StateListTail,
Data);
end
else
Search(Current'^.InputList,Data)
if
=
nil
then
Add(Current^.InputList,Current'^.InListTail,
Data);
end;
(* if *)
(* Enter
o
o
new
Data Streams
and (Oper2
internal
o
in
Data List
*)
((Operl
EXTERNAL)
EXTERNAL)) and
(Operl
Oper2) then
if Search(DataHead,Data) = nil then
Add(DataHead,DataTail,Data);
(* Reset Strings *)
Data := blank;
if
Operl
Met
:= blank;
Oper2
end
end;
:= blank;
:= blank;
(* while *)
(* LoadDataStnicture *)
*)
(*
procedure WriteString(var File:text;
Str: stringSO);
var
ndx: integer;
begin
ndx
:= 0;
while Str[ndx]
o " do
begin
67
not *)
write(File,Str[ndx]);
ndx :=ndx +
(* while *)
end;
end;
1;
(* WriteString *)
*)
(*
procedure MakePSDL(Head: OperPtr);
(* Generates partial PSDL Specification for each new Operator *)
(* in the Graphical decomposition *)
type
stringlO
= packed
array [0.,9] of char;
var
(*
Current: OperPtr;
Temp pointers
*)
InTemp: DataPtr;
OutTemp: DataPtr;
State Temp: DataPtr;
OutFile: text;
NodeName:
(*
stringlO;
Unix
file
name
*)
begin
Current := Head;
NodeName := 'NewNode.Ol';
while Currento
(* First file
name
*)
do
nil
begin
rewrite(OutFile,NodeName);
(* output
PSDL
(* Create
new
file *)
*)
write(OutFile;OPERATOR
');
WriteString(OutFile,Current^.OpName);
writeln(OutFile);
writeln(OutFile);
writeln(OutFile,'SPECIFICATION');
writeln(OutFile);
InTemp :=
if InTemp
Current^.InputList;
o
nil
(* Generate Input
then
begin
write(OutFile;iNPUT
');
WriteString(OutFile,InTemp'^.Name);
writeln(OutFile);
InTemp := InTemp^.Link;
while InTemp
nil do
o
begin
write(OutFile;
');
WriteString(OutFile,InTemp^,Name);
writeln(OutFile);
InTemp
:=
InTemp^. Link;
68
list
*)
(* while *)
end;
N\Titeln(OutFile);
end;
(* if *)
OutTemp :=
if OutTemp
Current^.OutputList;
o
then
nil
(* Generate
begin
write(OutFile;OUTPUT
Output
');
WriteString(OutFile,OutTemp'^.Name);
writeln(OutFile);
OutTemp := OutTemp^. Link;
while OutTemp
nil do
o
begin
write(OutFile,'
');
WriteString(OutFile,OutTemp^.Name);
wTiteln(OutFile);
OutTemp
:=
OutTemp^.Link;
(* while *)
end;
writeln(OutFile);
end;
(* if *)
StateTemp := Currenf^.StateList;
if StateTemp
nil then
o
(* Generate State hst *)
begin
write(OutFile;STATE
');
WriteString(OutFile,StateTemp^.Name);
writeln(OutFile);
StateTemp := State Temp'^.Link;
while StateTemp
nil do
o
begin
write(OutFile;
');
WriteString(OutFile,StateTemp^.Name);
writeln(OutFile);
StateTemp
end;
:=
StateTemp^ .Link;
(* while *)
writeln(OutFile);
end;
(* if *)
write(OutFile,'MAXIMUM
EXECUTION TIME
WriteString(OutFile,Cun-ent^.MET);
writeln(OutFile);
writeln(OutFile);
Current := Currenf^.Link;
(*
Dynamically create new
ifNodeName[9] =
file
'9'then
begin
69
name
*)
');
list
*)
;
NodeName[9]
NodeName[8]
end
:=
'0';
:=
succ(NodeName[8]);
:=
succ(NodeName[9]);
(* if *)
else
NodeName[9]
(* while *)
end;
end;
MakePSDL
(*
(*--
*)
-
-
*)
procedure MakeDataStream (Head: DataPtr);
(* Generate PSDL Data Stream *)
var
Temp:
DataPtr;
Outfile: text;
begin
rewrite(Outfile,'psdl.ds');
writeln(Outfile);
if
Head
o
nil
then
begin
Temp
:= Head;
write(Outfile,'DATA STREAM ');
WriteString(Outfile,Temp^.Name);
writeln(Outfile);
Temp
:= Temp'^.Link;
while
Temp
o
nil
do
begin
write(Outfile,'
');
WriteString(Outfile,Temp^.Name);
write In(Outfile);
Temp
end;
:=
Temp^.Link;
(* while *)
writeln(Outfile);
end;
end;
(*
(* if *)
(*
MakeDataStream
*)
*)
main *)
LoadDataStructure(OpHead, OpTail, DataHead, DataTail);
begin
(*
MakePSDL(OpHead);
MakeDataStream(DataHead )
(* main *)
end.
70
APPENDIX
D.
INPUT AND OUTPUT LINK ANALYZER
LINK STATEMENTS
ab.ape:10s-->bee
ac.ape:10s-->cat
bc.bee:20s— x:at
b.cat:30s-->EXTERNAL
state.cat:30s-->cat
cd.cat:30s-->dog
aEXTERNAL-->ape
dc.dog:10s-->cat
NEWLY CREATED NODES
NewNode.OL
OPERATOR
ape
SPECIFICATION
INPUT a
OUTPUT ab
ac
MAXIMUM EXECUTION TIME
10s
NewNode.02:
OPERATOR
bee
SPECIFICATION
INPUT ab
OUTPUT be
MAXIMUM EXECUTION TIME 20s
NewNode.03:
OPERATOR cat
SPECIFICATION
INPUT ac
be
dc
OUTPUT b
cd
STATE state
MAXIMUM EXECUTION TIME 30
71
NewNode.04:
OPERATOR
dog
SPECIFICATION
INPUT cd
OUTPUT dc
MAXIMUM EXECUTION TIME
Data Stream part for
OPERATOR
10s
top:
DATA STREAM ab
ac
be
cd
dc
72
APPENDIX
E.
BOURNE SHELL SCRIPTS
CONSTRUCT SCRIPT:
while test-s node. list do
getChoice
ddb.in
cat choice spec
getProperty
SDE ddb.out
mv ddb.out psdl.spec
»
cat ddb.in psdl.spec
mv temp
» temp
ddb.in
storeProperty
Software_Base
SB_out then
echo "Software Search Complete
addlmpl
if test-s
-
implementation found'
else
echo "Software Search Complete - no match found"
echo "Do you want to decompose, y or n."
read x
if test
$x = y then
GE
else
adaEditor
addAdalmpl
fi
fi
done
echo "Construction Complete"
GRAPHIC EDITOR SCRIPT:
getjnputs
graph
nodes < graph. links
cat graph. links psdl.ds
cat choice
»
psdl.imp
Imp Graph psdl.imp
»
ddb.in
SDE ddb.in
73
storeProperty
Graphic graph. pic
StoreProperty
createNodes
cat
»
ddb.in
74
REFERENCES
1.
Booch, G., Software Engineering with Ada®, 2nd
ed.,
Benjamin Cummings
Publishing Co., Inc., 1987.
2.
Pressman,
Hill
R.,
Software Engineering:
Book Company,
A Beginners
Guide, pp. 1-93,
McGraw-
1988.
3.
Luqi, Rapid Prototyping for Large Software System Designs,
Dissertation, University of Minnesota, Duluth, Minnesota, 1986.
4.
Luqi, Berzins, V., "Rapidly Prototying Real-Time Systems,"
V. 5, pp. 25-36, September 1988.
IEEE
Software,
5.
Luqi, Ketabchi, M., "A Computer Aided Protyping System,"
V. 5, pp. 66-72, March 1988.
IEEE
Software,
6.
Janson, D., A Static Scheduler for the Computer Aided Prototyping System: An
Implementation Guide, Master's Thesis, Naval Postgraduate School, Monterey,
California,
7.
Doctoral
March 1988.
O'Hern, T., A Conceptual Level Design for a Static Scheduler for Hard RealTime Systems, Master's Thesis, Naval Postgraduate School, Monterey,
California,
March 1988.
8.
Naval Postgraduate School, Technical Report NPS52-88-009, Automated
Translation from a Prototyping Language into Ada®, by C. Moffitt, II, and
Luqi,pp. 7-10, April 1988.
9.
The Mitre Corporation, Guidelines for Designing User Interface Software,
U.S. Department of Commerce, National Technical Information Service,
August 1986.
10.
Dumas,
11.
Teitelbaum, T., and Reps, T., "The Cornell Program Synthesizer: A SyntaxDirected Programming Environment," Connunications of the ACM, v. 24:9,
pp. 563-573, September 1981.
J.,
Designing User Interfaces for Software, Prentice-Hall, 1988.
75
C and
Languages, pp. 155-157, Plenum Press, 1986.
12.
Shi-Kuo,
13.
Sun Microsystems, Doing More with UNIX: Beginner's Guide, pp. 123-149,
others, Visual
1986.
14.
Thorstenson, R., A Graphical Editor for the Computer Aided Prototyping
System (CAPS), Master's Thesis, Naval Postgraduate School, Monterey,
California,
15. Galik, D.,
December 1988.
A Conceptual Design
of a Software Base Management System for the
Thesis, Naval Postgraduate
Computer Aided Prototyping System, Master's
School, Monterey, California, December 1988.
16.
Altizer, C, Implementation of a Language Translator for a Computer Aided
Prototyping System, Master's Thesis, Naval Postgraduate School, Monterey,
California,
17.
December 1988.
Wood, M., An Execution Support System for Rapid
Prototyping, Master's
December 1988.
Thesis, Naval Postgraduate School, Monterey, California,
L., A Scheduler for Critical Timing Constraints, Master's Thesis,
Naval Postgraduate School, Monterey, California, December 1988.
18.
Marlowe,
19.
Department of Defense, Military Specification MIL-H-48655B, Human
Engineering Requirements for Military Systems, Equipment and Facilities, 31
January 1979.
20.
Department of the Navy, OPNAV NOTICE 5000, Navy Rapid Prototyping and
the Research Development and Acquistion Process, 20 February 1988.
76
BIBLIOGRAPHY
Barstow, D., and others, Interactive Programming Environments, McGraw-Hill
Book Company,
1984.
Department of Defense, Military Standard MIL-STD-1472C, Human Engineering
Design Criteria for Military Systems, Equipment and Facilities, 1 September 1983.
McDermid,
J.,
Intergrated Project Support Environments, Peter Peregrinus Ltd.,
1985.
A Design
of a Syntax-Directed Editor for CAPS, Master's Thesis, Naval
Postgraduate School, Monterey, California, December 1988.
Porter, S.,
Sanders, M., and McCormick, E.,
McGraw-HiU Book Company,
Human
1987.
77
Factors
in
Engineering and Design,
INITIAL DISTRIBUTION LIST
1
.
Defense Technical Information Center
Cameron
Station
Alexandria,
2.
Library,
VA
22304-6145
Code 0142
Naval Postgraduate School
Monterey, CA 93943-5002
3.
Commandant
of the Marine Corps
Code TE 06
Headquarters, U.S. Marine Corps
Washington,
4.
DC 20380-0001
Commanding General
Marine Corps Research, Development
and Acquistion Command (Code C2A)
Attn. CAPT H.G. Raum, USMC
Washington, DC 20380-0001
5.
Office of Naval Research
Office of the Chief of Naval Research
CDR Michael Gehl, Code 1224
N.
Quincy Street
800
Attn.
Arlington,
VA 22217-5000
6.
Space and Naval Warfare Systems
Attn. Dr. Knudsen, Code PD 50
Washington, DC 20363-5100
7.
Ada
Joint
Command
Program Office
OUSDRE(R&AT)
Pentagon
Washington,
8.
DC
20301
Naval Sea Systems
Attn.
CAPT Joel
Command
Crandall
National Center #2, Suite
Washington,
DC
7N06
22202
78
9.
Office of the Secretary of Defense
Attn.
CDR
Barber
STARS Program
Office
DC
20301
Washington,
10.
Office of the Secretar>' of Defense
Attn. Mr. Joel Trimble
STARS
Program Office
Washington,
11.
DC
Commanding
20301
Officer
Naval Research Laboratory
Code 5150
Attn. Dr. Elizabeth
Washington,
12.
DC
Wald
20375-5000
Navy Ocean System Center
Attn. Linwood Sutton, Code 423
San Diego, Califomia 92152-500
1
3.
National Science Foundation
Attn. Dr. William
Washington,
14.
DC
Wulf
20550
National Science Foundation
Division of Computer and Computation Research
Attn. Dr. Peter
Washington,
15.
National Science Foundation
Director,
Atm. Dr.
PYI Program
C. Tan
Washington,
16.
Freeman
20550
DC
DC
20550
Office of Naval Research
Computer Science Division,
Attn, Dr. Van Tilborg
800 N. Quincy
Arlington,
VA
Code
1
133
Street
22217-5000
79
17.
Office of Naval Research
Applied Mathematics and Computer Science, Code 1211
Attn. Mr J. Smith
800 N. Quincy
Arlington,
18.
VA
Street
22217-5000
Defense Advanced Research Projects Agency (DARPA)
Integrated Strategic Technology Office (ISTO)
Attn.
MAJ Mark Pullen, USAF
1400 Wilson Boulevard
VA 22209-2308
Arlington,
19.
Defense Advanced Research Projects Agency
Director, Naval Technology Office
1400 Wilson Boulevard
Arlington, VA 2209-2308
20.
National Science Foundation
(DARPA)
Director of Computer and Computation Research
Attn. Dr.
Tom Keenan
Washington,
DC 20550
21.
Defense Advanced Research Projects Agency
Director, Strategic Technology Office
1400 Wilson Boulevard
Arlington, VA 2209-2308
(DARPA)
22.
Defense Advanced Research Projects Agency
(DARPA)
Director, Prototype Projects Office
1400 Wilson Boulevard
Arlington, VA 2209-2308
23.
Defense Advanced Research Projects Agency
Director, Tactical Technology Office
1400 Wilson Boulevard
Arlington, VA 2209-2308
24.
COL C.
JCS
Cox,
USAF
(J-8)
Nuclear Force Analysis Division
Pentagon
Washington, DC 20318-8000
80
(DARPA)
25.
LTCOL Kirk Lewis, USA
JCS
(J-8)
Nuclear Force Analysis Division
Pentagon
Washington, DC 20318-8000
26.
U.S. Air Force Systems
Command
Rome
Air Development Center
A. DiNitto,
13441-5700
Griffis Air Force Base,
RADC/COEAttn. Mr. Samuel
NY
27.
U.S. Air Force Systems Command
Rome Air Development Center
RADC/COE
Attn. Mr. William E.
Rzepka
NY 13441-5700
Griffis Air Force Base,
28.
Professor Luqi
Code 52LQ
Naval Postgraduate School
Computer Science Department
Monterey, CA 93943-5000
81
Jr.
Thesis
R245235
c.l
Rauffi
Detiign and implementation of an expert
user interface for the
Computer Aided Prototyping System.
;j$/