1
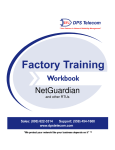
53 2 3 4 VBAT VBAT_Motors Power Input Port COR30 R30 COJ9 J9 Kinect 12V COJ10PIJ1001 J10 3.3V_Reg Power_3V3.SchDoc VBAT 5V 3.3V COJ11 PIJ1101 J11 VIN PIS103 VREG_5V EN_Board VIN P23 3PIU1103 PIU1105 PIU1102 VBAT_Aux PIJ1102 EN_Motors COU12A U12A P22 1PIU1201 PIU1205 PIU12066 PIU1202 Main PWR (5A) VREG_3V3 EN 5 2 VIN_Battery EN OUTA INA PWM INB OUTB PIR3902 COR39 R39 470 COD7 D7 PID701 Green PID702 COD8 D8 PID801 Green PID802 TXD RXD RESET Motors Enabled SCLK SDA CS 2 1 PIJ1502 PIJ1501 2 1 PIJ1402 PIJ1401 2 1 PIJ1302 PIJ1301 COJ12 J12 COJ13 J13 COJ14 J14 COJ15 J15 C COS2 S2 PIS201 3.3V 2 1 PIJ120 PIJ1201 5V I2C_CLK I2C_DATA L-Motor EN_Motors COU13B U13B 4 PIU1304 P19 3PIU1303 PIU1305 PIU1302 RESET PIS202 Reset Switch ADC ADC.SchDoc 12V COJ17 J17 Current_Sense 2 Board Pwr Enabled 5 RX TX NLP0NLP1NLP2NLP3NLP4NLP5NLP6NLP7NLP8NLP9NLP10NLP11NLP12NLP13NLP14NLP15 P27 P26 P25 NLP19NLP20NLP21NLP22NLP23NLP24NLP25NLP26NLP27 VBAT_Aux Aux_A Aux_SW.SchDoc VIN NLP16 P16 VBAT_Aux 5V VBAT PIR3102 PIR3402 VIN PIR3101 PIR3401 COR31 R31 0 ohm PIMTG101 PIC4902 PIC4901 COC49 1uF C49 COR34 R34 1 PIJ501 2 PIJ502 COMTG2 MTG2 3 PIMTG301 PIQ503 COMTG3 MTG3 PIR3501 PIR3508 PIJ7022 PIR3502 PIR3507 PIJ7023 PIR3503 PIR3506 PIJ704 PIJ7014 PIJ7024 PIR3504 PIR3505 COJ7 J7 PIJ705 PIJ7015 PIJ7025 PIR3601 PIR3608 PIJ706 PIJ7016 PIJ7026 PIR3602 PIR3607 PIJ707 PIJ7017 PIJ7027 PIR3603 PIR3606 PIJ708 PIJ7018 PIJ7028 PIR3604 PIR3605 PIJ709 PIJ7019 PIJ7029 COR36 R36 4.7k PIJ7010 PIJ7030 PIR3701 PIR3708 PIR3702 PIR3707 PIJ801 PIJ803 PIJ805 PIR3703 PIR3706 PIJ802 PIJ804 PIJ806 PIR3704 PIR3705 COR37 R37 4.7k Note: For possible cooling fan see: Digikey: 259-1463-ND 10 PIQ502 COMTG4 MTG4 4.7k PIJ7021 PIJ703 PIJ7013 COQ5 Q5 NLEN0Board EN_Board 1 PIQ501 COR35 R35 PIJ701 PIJ7011 PIJ702 PIJ7012 2 D COJ5 J5 Fan (Optional) Spare GPIO Digital I/O DNI PIMTG201 PIMTG401 1 Encoders COJ8 J8 1 2 PIJ7020 P0 P1 P2 P3 P4 P5 P6 P7 P12 P13 P14 P15 COR40 R40 PIR4002 COR41 R41 PIR4102 COR42 R42 PIR4202 COR43 R43 PIR4302 0 ohmPIJ1601 1 PIR4001 0 ohmPIJ1602 2 PIR4101 0 ohm 3 DNI PIR4201 PIJ1603 0 ohmPIJ1604 4 PIR4301 P8 P9 P10 P11 Sheet: VIN NLP18 P18 Project: 3 Size: Letter Top level system integration schematic Part #: Eddie Control Board 599 Menlo Drive Rocklin, CA 95765 www.parallax.com 2 AUX C EN System Integration.SchDoc Description: Raw PCB AUX B EN Aux_C VBAT_Aux Aux_SW.SchDoc COJ16 J16 COPCB 300-28990 1 C Aux_B Aux_SW.SchDoc NLP17 P17 PIC4802 PIC4801 5V AUX A EN COC48 22uF C48 COMTG1 MTG1 B PIJ1702 5 PIR3901 + 1 2 PIJ1701 P0 P1 P2 P3 P4 P5 P6 P7 P8 P9 P10 P11 P12 P13 P14 P15 P16 P17 P18 P19 P20 P21 P22 P23 P24 P25 P26 P27 PIR3801 EN_Motors COU13A U13A P20 1PIU1301 PIU1305 PIU13066 PIU1302 P0 P1 P2 P3 P4 P5 P6 P7 P8 P9 P10 P11 P12 P13 P14 P15 P16 P17 P18 P19 P20 P21 P22 P23 P24 P25 P26 P27 PIR3802 Prop Propeller.SchDoc USB USB-to-Serial.SchDoc 2 EN_Motors 270 COJ18 J18 R-Motor Left_Motor H-Bridge Driver.SchDoc B COR38 R38 PIJ1802 Current_Sense EN_Motors COU12B U12B P21 3PIU1203 PIU1205 PIU12044 PIU1202 3.3V + 1 2 PIJ1801 2 COS1 S1 PIR3302 COR33 R33 Power-mode Select SW 1M 3. Board + Motors PIR3301 2. Board 1. OFF 5A A _ 4 3 1 PIS101 PIS104 2PIS102 VIN_Battery EN OUTA INA PWM INB OUTB EN_Motors COU11B U11B 4 PIU1104 COF2 F2 5V_Reg Power_5V.SchDoc Right_Motor H-Bridge Driver.SchDoc P24 1PIU1101 PIU1105 PIU1102 Motor PWR (20A) COJ6 J6 47k PIR3002 PIR2902 EN_Motors COU11A U11A 6 PIU1106 VBAT_Motors PIJ1002 2 Q4 PIQ401 COR29 R29 COQ4 1 2 PIJ602 PIJ601 5 PIR3001 47k PIR3201 2 PIQ402 1 PIR2901 3PIQ403 20A 2 EN_Motors 12V VIN VREG_12V EN 5 A COF1 F1 PIJ901 PIJ902 PIJ903 1 2 3 PIR3202 COR32 R32 100k 5V NLEN0Motors EN_Motors 5 12V_Reg Power_12V.SchDoc _ 1 550-28990 Rev: A Date: 10/10/2011 Sheet of Drawn By: K. McCullough 4 D