1
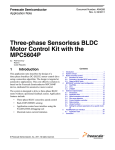
PMSM field oriented control Considering closed loop feedback control of a plant model as in Equation and Equation , using stanard PI controllers, then the controller proportional and integral gains can be derived, using a pole-placement method, as follows: Equation 7 Equation 8 where ω0 represents the system natural frequency [rad/sec] and ξ is the Damping factor [-] of the current control loop. 3.4 Output voltage actuation 3.5 Phase current measurement The 3-phase voltage source inverter shown in Figure 4 uses two shunt resistors (R68 and R48) placed in each of the inverter leg as phase current sensors. Stator phase current which flows through the shunt resistor produces a voltage drop which is interfaced to the AD converter of microcontroller through conditional circuitry (refer to MC9S12ZVML128 Evaluation Board User Manual available at freescale.com). Figure 4. 3-phase DC/AC inverter with shunt resistors for current measurement 3-phase Sensorless PMSM Motor Control Kit with MagniV MC9S12ZVM Application Note Rev. 0 05/2015 Freescale Semiconductor, Inc. 7