1
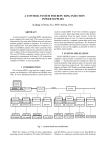
Proceedings of ICALEPCS2003, Gyeongju, Korea APPLICATIONS OF CANBUS AND CONTROLNET IN EPICS SYSTEM OF BEPCII Shifu Xu, Xiangcheng Kong, Qi Le, Jijiu Zhao, IHEP, Chinese Academy of Sciences P.O.Box 918(10), Beijing 100039, P.R.China Abstract BEPC (Beijing Electron Positron Collider) is now upgrading to the BEPCII. The BEPCII will serve high energy physics experiments and synchrotron radiation experiments which consists of a 1.55~1.89GeV linac accelerator, two transport lines and a 1~2.8GeV storage ring. The control system will upgrade using the Experimental Physics and Industrial Control System (EPICS) system. The CANbus and ControlNet are chosen as the fieldbuses to communicate between the VME frontend computers and the remote devices. In order to utilize the CANbus devices of linac control system in BEPC, we transferred the CANbus EPICS driver to EPICS system of BEPCII. For some sub-system of BEPCII, we introduced ControlNet fieldbus and we use Allen-Bradley programmable logic controller (PLC) as the remote controller. In this paper, we describe experiences with CANbus in linac control system of BEPCII and fieldbus ControlNet in a prototype system. INTRODUCTION BEPCII, which will be upgraded from BEPC, consists of a 1.55~1.89GeV linac accelerator, two transport lines and a 1~2.8GeV storage ring, which is a double ring schema [1]. To reach the goal of BEPCII, the current control system should be upgraded. The new control system is based on EPICS system, which is noncommercial and open source, and a lot of applications for accelerator commissioning and operating can be shared with other laboratories. To meet the budget requirements of BEPCII, some existing parts should be merged into or transferred to EPICS system. Before upgrading, the fieldbus CAN [2] was used to control magnet power supplies of the linac because of its reliability, ease of use and wide acceptance and support by industry. In the new control system of BEPCII, the existing CAN bus devices are still employed because the EPICS CAN bus device driver already exists [3]. What needs to be done is migrating the device driver to the new environment and developing application software using EPICS tools To control the vacuum interlock system, injection power supplies and cryogenic system of BEPCII, the field bus ControlNet is introduced and Allen-Bradley PLC is used as the remote controller. CANBUS IN LINAC POWER SUPPLY CONTROL SYSTEM Can Bus Node Device The CAN bus Node, which is FB remote I/O module, is custom intelligent device. It provides digital/analog mixed 483 input/output functions, namely 8 channels of analog input (AD), 4 channels of analog output (DA), 8 channels of digital input and output (DI & DO). It has the following features: • It conforms to CAN2.0A standard. • Adopting RJ-45 connector is very convenient. • The digital/analog I/O channels are mixed in a board. This is suitable for individual device control and easy for system configuration. • It can store the max/min readings on board. • Initial values of DA and DO can be programmed. • The built-in watch-dog reduces the ratio of failure. System Architecture before Upgrade The original power supply control system of linac is shown in figure 1, which was upgraded from the former RS232 serial network. A PC’s serial port is connecting to a RS232/CAN converter. The PC controls the CAN bus through the converter. Each CAN node can control up to 4 magnet power supplies (PS). PC PC Et her net RS233/ CAN PC CAN_H CAN_L CAN Node 1 PS PS … CAN Node n PS PS Figure 1: System architecture before upgrade System Architecture under EPICS The new power supply control system of linac under EPICS is shown in figure 2. On EPICS Input/Output Control (IOC) side, MVME2431 is used as the CPU board. The IP module TIP810 (version 2.0) is used as CAN controller module, the IP carrier board is VIPC616. The former RS232/CAN converter is removed. On EPICS Operating Interface (OPI) side, SUN workstation running Solaris 8 or PC running Exceed is used for software development and machine operating. Proceedings of ICALEPCS2003, Gyeongju, Korea OPI OPI CPU BOARD: MVME2431 I P: TI P810 I P CARRI ER: VI PC616 Et her net I OC CAN_H CAN_L CAN Node 1 PS PS … CAN Node n PS PS Figure 2: System architecture under EPICS Software Development The software development consists of the following parts: migration of CAN bus device driver, design of new type of EPICS record, EPICS database design and human machine interface (HMI) development. The goal of software development is to get the following functions. • Monitor the current. • Mode operation. All the current values of PSs (called a kind of mode) can be saved and restored for future use. • Single PS’s knob and ramping. Adjust individual power supply. When the setpoint is larger or smaller than the current value, it should ramp to the setpoint. • All PSs’ ramping mode. When loading a new mode, all the power supplies should ramp from the current values to the setpoints simultaneously. • The power supply’s parameter’s backup and restore, for example, the power supply’s online/offline information. • CAN bus status can be monitored and reported. • Change the polarity of steering magnet power supplies. The existing EPICS CAN bus device driver should be transferred according to the custom CAN bus node’s protocol and the system’s requirements. The main change is that the EPICS database record instance (.db file) should be able to access different analog channels. Another change is that the driver should distinguish the ai record’s processing and the read back of DA. To monitor the CAN bus status from OPI, a new type of record “canstatus” have been developed, which can provide CAN bus status information, CAN bus node error messages, transmitted message counter, received message counter, error event counter, bus off event counter, etc. The heart of IOC is a memory resident database together with various memory resident structures. There are about 620 records resident in IOC. EPICS database configuration tool VDCT is used to design the real-time database, which is a multi-platform tool written in JAVA. EPICS OPI tool EDM is used to build the controlling and monitoring screens, which is ease to use and can build friendly HMI. To realise the mode operation and parameter’s backup and restore, the script language TCL/TK is used, which is ease to integrated in EDM. The important part of software development is to meet the requirements of single power supply’s ramping and all power supplies’ ramping, which is carried out using State Notation Language (SNL). SNL is component of EPICS, which provides a simple and powerful tool for programming sequential operation in a real-time control system. An OPI screen is shown in figure 3. Figure 3: An OPI screen for linac power supply control system 484 Proceedings of ICALEPCS2003, Gyeongju, Korea CONTROLNET IN VACUUM CONTROL SYSTEM AT STORAGE RING The vacuum system is to maintain the high vacuum of beam chamber to ensure the positron and electron’s accelerating and storing in it. The vacuum control system will control and monitor the following devices: ion pumps, gauges, valves and temperature sensors, etc. Two Allen-Bradley ControlLogix PLCs are selected as the heart of the vacuum protection interlock system, because ControlLogix is about 8~10 times faster and 30% cheaper than PLC-5 [4]. The SNS Project has selected the ControlLogix PLC as the standard PLC [5]. The PLCs are used to monitor vacuum pressure and gauges interlock outputs and to provide control of the sector gate valves. The PLCs also output interlock signals to RF system and other subsystems and receive interlock signals from other machine protection system (MPS). A ladder logic program resides and runs in the PLC processor to control the gate valves on a fail-safe basis. Based on EPICS, the architecture of vacuum control system of storage ring is shown below. OPI OPI I P- OCTAL485 I P- OCTAL485 I P- OCTAL232 5136- CN- VME MVME2431 Ethernet/IP Et her net I OC2 I OC1 1756OB16 1756I B16 1756 ENB 1756 CNB Cont r ol Logi x 5555 Cont r ol Net CONCLUSION The field bus CAN and ControlNet have been selected as the main field buses to control devices in the control system of BEPCII. CAN bus has been successfully used in the upgrading of BEPC linac power supply control system and ControlNet has been tested in a prototype system. These applications will be helpful for developing other parts of BEPCII control system. PLC2 MPS Val ves board of ControlNet on IOC is SST 5136-CN-VME.Two IOCs are planned for vacuum controls of storage ring, positron and electron rings respectively. The IOC interfaces directly with vacuum device controllers if the controllers use serial communication RS232 or RS485, for example, gauge controller (GC), ion pump controller (IPC), temperature controller (TC). The ControlNet needs configuring before running. The configuration method is as follows: • Configure and start the SST card according to the card’s user’s manual. • Prepare software RSNetworx to configure SST card. Register new eds file in RSNetworx using EDS Wizard. • Configure all the modules of ControlLogix PLC using software RSLogix5000. • Configure the produced and consumed tags in RSLogix5000 for ControlLogix PLC. • Set up network parameters in RSNetworx, e.g. Network Update Time (NUT), maximum scheduled address (SMAX), maximum unscheduled address (UMAX), etc. • Use RSNetworx to set up the corresponding produced and /or consumed connections. The EPICS device driver for 5136-CN-VME has been developed [7] and has been tested in the prototype system. The OPI is developed using EPICS OPI tool EDM, SNL and TCL/TK. EPICS real-time database is designed using tool VDCT. GC I PC TC Gauges I on Pumps Temper at ur e Sensor s REFERENCES . Figure 4: Architecture of vacuum control system of storage ring The ControlNet [6] is selected as the field bus to exchange data between PLCs. It has high speed, deterministic and repeatable network features and has producer/consumer communication model. It can have redundant media and can remove/insert devices under power. It is ideal for transmitting time-critical vacuum system information and providing real-time control. The communication between IOCs and PLCs can be through ControlNet, or alternatively Ethernet/IP. The interface 485 [1] http://bipc5.ihep.ac.cn/download/pdr_download.htm [2] CAN in Automation (CiA), http://www.can-cia. [3] http://www.aps.anl.gov/asd/people/anj/ipac/ [4] J.Y. Tang, et al. “A Distributed and Collaborative PLC lab for SNS”, ICALEPCS’99, Trieste, Italy, p370 (1999) [5] H. C. Hesuh, et al. “Design and Development of the SNS Ring Vacuum I&C System", PAC'01, Chicago, USA, p779 (2001) [6] http://www.controlnet.org/ [7] http://www.sns.bnl.gov/epics/cnet /