1
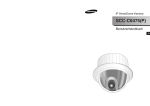
CHAPTER 4. GRID RESAMPLING 104 Figure 4.1 Actual, manually defined refinement regions for a BMW 528i vehicle. Data set courtesy BMW AG. levels must be known a priori and specified by the user. The same is true for the software presented in [45] which provides interactively manipulable cutting planes on which the enclosing unstructured volume is resampled. 4.3 Semi-Automatic Resampling The PowerVIZ software requires input data to be defined on a hierarchy of Cartesian grids (including a single Cartesian grid). Utilizing a single Cartesian grid is only acceptable if any part of the flow is equally interesting. In general, this cannot be assumed since most flows include both turbulent regions where velocities vary considerably even over small distances, and regions where velocities defined for neighboring grid points are virtually identical over large distances (we then speak of laminar flows). Turbulent regions carry the bigger part of the kinetic energy in a flow and, thus, usually are of higher interest to the researcher than laminar flows (in Chapter 5 we will discuss techniques for approximately identifying turbulent regions). However, “interesting” is not necessarily equivalent to “turbulent” as can be observed by considering a CFD simulation of an engine compartment. For example, the degree to which an engine is cooled considerably depends on the amount of air flowing through inlets installed at the vehicle front. Thus, in order to obtain accurate quantitative data about the cooling, the computational grid around the air inlets will have to be finely resolved. However, this very region is not necessarily turbulent which illustrates that grid generation in general is application-dependent and should incorporate domain knowledge. A sensible approach for constructing the required hierarchy of Cartesian grids is, therefore, to let engineers define refinement regions (Figure 4.1) and corresponding refinement levels manually and to automatically perform the grid conversion based on this information. We will call this approach semi-automatic resampling. 4.3.1 Algorithmic Overview The main task of a resampling algorithm as it was defined above is to interpolate data values. For each interpolation, the algorithm needs to find a pair of cells—