1
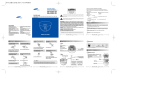
1.4 Adjustment of Motor Phase Current Current Control Voltage Control Power Error Power Error 1 Current Curve 2 3 Resolution 4 5 50kHz Filter ON/OFF I 1 I 2 O 3 O 4 O 5 O 6 O 7 I 8 I 9 I 10 I 11 I 12 I 13 O 14 Operating Current 120 Ohm Standby Current 1.4.2 GND / Supply Motor A + Motor A Motor B + Motor B Power Dump Direction PNP Stepclock PNP Digital GND Standby Current Move Current Current GND Error 1 Current Curve 2 3 Resolution 4 5 50kHz Filter ON/OFF + I 1 I 2 O 3 O 4 O 5 O 6 O 7 I 8 I 9 I 10 I 11 I 12 I 13 O 14 + Standby Current GND / Supply Motor A + Motor A Motor B + Motor B Power Dump Direction PNP Stepclock PNP Digital GND Standby Current Move Current Current GND Error Operating Current TT0012GB Motor Current Controlled by Voltage or Current In cases where current control is not desired via an external resistor, but via an externally applied voltage, terminals 11-13 can also be used. A voltage in the range 0 to 2.50VDC should be applied to the two terminals, corresponding to motor currents of 0 to 3Amp for SMD41Ax, 0 to 6 Amp for SMD41/42Bx, and 0 to 9 Amp for SMD41/42Cx. If current control of the motor phase current using a standard signal in the range 0-20mA is required, a 127 Ohm/1%(E48) or 120 Ohm/5%(E24) resistor should be connected between "Current GND" and each input — see above illustration. The relationship between the voltage at the terminals and the motor current is liniar from 0 to full-scale. 10 JVL Industri Elektronik A/S — User Manual Step Motor Driver SMD41/42