1
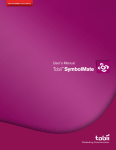
User Manual BASEMENT 3.2.2 BASIC SIMULATION ENVIRONMENT BASEchain : one dimensional model Discrete Representation 1d Overview original partition basic geometrical information: CrossSection[i-1] geometry of cross-sections and their location [xorig,yorig] Node[i-1] CrossSection[i] Node[i-1/2] Node[i] CrossSection[i+1] Node[i+1/2] Edge[i] Edge[i+1] Node[i+1] y Element[i-1] Element[i] Element[i+1] x CV i-1 xi-1 i-½ Δxi i xi i+½ Δxi+1 computational partition i+1 basic numerical information (based on original partition): Element xi+1 (cell, control volume) node element center [xorig,yorig], geometry of cross-section, conservative quantities [Q,A] edge with fluxes between two elements (control volumes) Fig. 4: Discrete Representation of the Topography within BASEchain In one dimension, an element consists of two nodes with known cross-section. With a cellcentred discretization, all variables – velocity, flow depth and cross-section geometry - are defined at the location of the nodes. The midpoint of the connecting line between two nodes defines the common edge of the two elements. The more nodes are known, the better the representation of the real world data, especially at regions with strongly curved watercourse. VAW ETH Zürich Version 7/8/2011 U I - 3.2-3