1
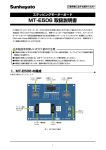
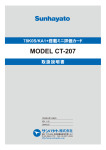
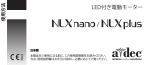
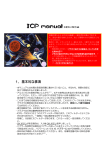
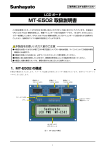
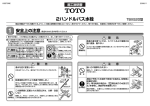
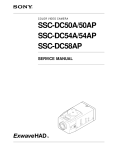
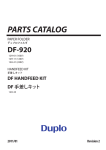
ご使用前に必ずお読みください DC モーターボード MT-E508 取扱説明書 この度は DC モーターボード MT-E508 をお買い求めいただきまして誠にありがとうございます。本製品は VPort with Power 規格を採用した、各種マイコンボード向けの拡張ボードです。DC モーターとモーター の回転数を検知するための赤外線センサー(フォトインタラプタ)、モーター電圧を調節できるボリューム抵 抗を搭載しています。VPort with Power 規格を採用しているマイコンボードと組み合わせて使用すること により、効果的なマイコン制御の学習を行うことができます。 本製品をお使いいただく前のご注意 ●本製品をお使いになるには電子工作や電子回路についての一般的な知識、マイコンについての知識や開発 環境などが必要です。 ●本製品をお使いになる前には、必ずマイコンのドキュメント類を参照してください。 ●静電気に弱い部品を使用していますので、静電気対策を施した上で本製品を取り扱ってください。 ●本製品に付属の基板スタンドは、基板の取付穴に差し込んでご使用ください。 1.MT-E508 の構成 本製品の構成を以下に示します。 DC モーター ドライバ IC 仮想ポート コネクタ(VPT) +5V モーター 電圧調整 3.5V TA7291FG HSOP-16 2 10 1 9 VPT(O4,I1) PWM, CTR3, SENS B5 モーター電圧調整 ボリューム B3 B2 B1 B0 3V BRK 2.5V 1 ENB PWMSENS DIR TB1 1 VR1 74AHC14 TSSOP-14 74AHC14 TSSOP-14 74AHC14 TSSOP-14 DC モーター LED2LED3 回転体 IN1 IN2 BRK CW CCW STP PH1 DCモーター ・電圧:3V±0.5V ・電流:35∼550mA DC Motor Board フォトインタラプタ 図 1 MT-E508 の構成 MODEL IN1 1 1 0 0 MT-E508 IN2 1 0 1 0 2.仮想ポートコネクタ 「VPort with Power」規格に対応した、2.54mm ピッチ 10 ピンのコネクタです。1 ∼ 8 番ピンに信号線、9 番ピンに GND、10 番ピンに +5V が割り付けられています。各ポートのピン割付は以下のとおりです。 ① VPT ポート センサー信号入力端子、DC モーター制御信号出力端子が接続されています。 表 1 VPT ポートのピン割付 番号 信号名 接続デバイス 1 2 3 4 5 6 7 8 9 10 VPT0 VPT1 VPT2 VPT3 VPT4 VPT5 VPT6 VPT7 GND VCC DC モーター フォトインタラプタ DC モーター DC モーター DC モーター DC モーター DC モーター フォトインタラプタ 接地 電源(+5V) マイコン側 入出力設定 出力 入力 出力 出力 出力 出力 出力 入力 - - 仕 様 回転方向切替信号、L:時計方向 L:回転体検出(8 番ピンと接続しています) PWM 信号(5、7 番ピンと接続しています) イネーブル信号、H:イネーブル PWM 信号(3、7 番ピンと接続しています) ブレーキ信号、H:ブレーキ PWM 信号(3、5 番ピンと接続しています) L:回転体検出(2 番ピンと接続しています) - - 3.使い方 (1)フォトインタラプタ フォトインタラプタは赤外線の発光素子と受光素子が向かい合わせに配置されており、その間を何らかの物体が通過 して赤外線がさえぎられたことを検知するセンサーです。本製品ではモーターの軸に取り付けられている回転体を検 知し、それにさえぎられる間隔を計測することでモーターの回転速度を得るために使用します。 回転体が赤外線をさえぎると L レベルが出力されます。 また、VPT ポートの 2 番ピンと 8 番ピンは基板上で接続されており、どちらのピンにも同じ信号が出力されます。 (2)イネーブル信号(ENB) この信号を H レベルにすると、DC モーターを制御する信号(PWM 信号、ブレーキ信号、回転方向切替信号)が有 効になります。この信号が L レベルのときはすべての制御信号が無効になり、 DC モーターはストップ状態(DC モー ターの両端子に電圧がかかっていない状態)になります。 (3)PWM 信号 DC モーターに PWM(Pulse Width Modulation:パルス幅変調)信号 デューティ を与えると、回転速度を制御することができます。DC モーターの回転速 100% 度はこの PWM 信号のデューティ比で決まります。デューティ比が 100% のときにもっとも高速で回転し、デューティ比が小さくなると回転速度が 遅くなり、ある値以下になると回転しなくなります。 50% 25% 本製品ではこの PWM 信号の周波数は 100Hz ∼ 1kHz 程度にしてくださ い。この周波数が低すぎたり、高すぎたりすると速度制御がうまく行えま せん。 0% 図 2 PWM 信号 また、VPT ポートの 3、5、7 番ピンは基板上で接続されていますので、どれかひとつのピンから PWM 信号を与え、 残りのピンは入力に設定して信号同士がぶつからないようにしてください。 DC モーターボード MT-E508 (4)ブレーキ信号(BRK) 100µsec以上ENB信号を Lレベルにする この信号を H レベルにすると、DC モーターの両端に電圧がかかり、ブレー キ状態になります。 本製品では、DC モーターが回転しているときにブレーキ信号を変化させ ENB信号 る場合(L → H または H → L)は、必ずブレーキ信号のレベルを変える BRK信号 前に 100µsec 以上の間ストップ状態(イネーブル信号を L レベルにする) にしてください。この処理を行わないと、モータードライバ IC 内部に貫 この間でBRK信号を 変化させる 通電流が流れ、ドライバ IC が壊れてしまいます。 図 3 BRK 信号 (5)回転方向切替信号(DIR) 100µsec以上ENB信号を Lレベルにする モーターの回転方向を切り替える信号です。この信号が L レベルのときに DC モーターは時計方向に、H レベルのときに反時計方向に回転します。 本製品では、DC モーターが回転しているときに回転方向を変える場合(L → H または H → L)は、必ず回転方向切替信号を変える前に 100µsec 以 上の間ストップ状態(イネーブル信号を L レベルにする)にしてください。 この処理を行わないと、モータードライバ IC 内部に貫通電流が流れ、ド ライバ IC が壊れてしまいます。 ENB信号 DIR信号 この間でDIR信号を 変化させる 図 4 DIR 信号 (6)モーター電圧調整ボリューム このボリュームで DC モーターにかかる電圧を 3V ± 0.5V の範囲で調整することができます。これにより DC モーター の回転速度を可変することができます。 実際に DC モーターがさまざまな機器に組み込まれて使用されている状況では、DC モーターにかかる機械的な負荷 変動により回転速度が増減してしまうことがあるため、常に回転数を監視し、回転速度を一定に保つための制御を行 います。 このボリュームはモーター電圧を可変することで、 このような回転数が増減する状況を作り出すことができますので、 DC モーターの速度制御プログラムの実習には最適です。 使用上のご注意 DC モーターの回転中に回転体やモーターの軸をおさえるなどして無理にモーターの回転を止めないでくださ い。回転中の DC モーターを無理におさえて回転を止めると過大な電流が流れてしまい、本製品をパソコン と接続して使用している場合は、パソコンの電源に深刻なダメージを与える場合があります。モーターを無 理に止める必要があるにもかかわらず、パソコンの電源能力に不安がある場合は、パソコンでプログラムを 書き込んだあと、電源を弊社製品「USB 電池 BOX(BU-C501)」と「AC アダプター(AD-S512)」の組 み合わせに取り替えてから動作させてください。 4.主な仕様 本製品の主な仕様を以下に示します。 表 2 MT-E508 の主な仕様 項 目 外形 電源 評価用入出力デバイス 仮想ポートコネクタ 入力デバイス 仕 様 72 × 95(mm) DC +5V フォトインタラプタ× 1 出力デバイス DC モーター× 1 基板寸法 2.54mm ピッチ 10 ピンコネクタ× 1 図 5 DC モーター特性図 備 考 使用電圧:DC 0.7 ~ 6V 推奨電圧:DC 1.0 ~ 5V 消費電流:35 ~ 550mA 最大トルク:7.6gcm/3V 定格トルク:2gcm/3V 回転数:15,200rpm/3V VPort with Power 規格準拠 D C B VP1 1 2532-10 10 9 8 7 6 5 4 3 2 1 LED1 SML-310VTT86 RED VCC GND VP17 VP16 VP15 VP14 VP13 VP12 VP11 VP10 R12 470 P5. L 100u/16V C7 SENS PWM BRK PWM ENB PWM SENS DIR CN1 P5. L 100 100 2 100 R6 R16 100 100 R5 R15 R4 2 P5. L 2 1 2 7 GND SN74AHC14PWR 7 14 0. 1u P5. L 0. 1u VCC U1G C9 14 R10 1k B1 SML-310YTT86 YLW C8 R9 2.2k B0 SML-310VTT86 RED B5 SML-310VTT86 RED B3 SML-310VTT86 RED B2 SML-310VTT86 RED 3 3 9 R11 10k TC74VHC00FT(EL) GND VCC U2E 5 6 1 8 P5. L 14 7 0. 1u C10 3 4 TC74VHC00FT(EL) GND VCC U3E 11 4 9 10 5 U2D TC74VHC00FT(EL) SN74AHC14PWR U1D 13 12 2 U1C U2A SN74AHC14PWR TC74VHC00FT(EL) 4 3 8 TC74VHC00FT(EL) U2C 6 U2B TC74VHC00FT(EL) 4 U1B SN74AHC14PWR 13 12 2 1 1 R13 1k 11 U3D TC74VHC00FT(EL) 3 U3A TC74VHC00FT(EL) 2 2 U1A SN74AHC14PWR 5 R14 1k 10 9 5 4 0. 1u C1 8 13 P5. L 12 11 U1E C11 10 0. 1u 6 7 9 2 3 6 8 10 12 14 16 SN74AHC14PWR SN74AHC14PWR U1F R7 22k 2 5 RPI-441C1 PH1 6 Vref=2.5∼3.5V R1 47k E Col P5. L VR1 NS-1003M B10K TC74VHC00FT(EL) U3C 6 U3B TC74VHC00FT(EL) LED2 SML-310DTT86 ORN LED3 SML-310DTT86 ORN 2 1 1 5 3 1 A 2 2 1 1 2 1 2 1 4 3 21 8 5 6 7 1 3 4 2 8 6 5 7 1 1 TA7291FG(5) NC NC NC NC NC NC NC NC I N1 I N2 Vr ef U4 12k R3 0. 1u C3 10u C4 1.0.0 Revision 0. 1u C5 7 F1 P5. L 2 10u C6 1 2 Red Black TEST POINT TB1 8 SW107010 DRAWING No. 1 Sheet to DC Motor 8 DCMotor Board PWB-MTE508-A Title R8 100 0.1u C2 nanoSMDC050F/13.2-2 1 2010/06/18 Date MT-E508 1 F1 F2 4 13 15 11 P5. L Product GND GND GND OUT1 OUT2 VS Vcc R2 200 P5. L Cat h A 7 1 D C B A DC モーターボード MT-E508 5.回路図 本製品の回路図を以下に示します。 ◎お願いとご注意 <サポート・お問い合わせについて> ●サポートに関する情報は当社のホームページ(http://www.sunhayato.co.jp/)に掲載します。 ●本製品に関するお問い合わせは、当社ホームページのお問い合わせページ(https://www.sunhayato.co.jp/ inquiry/)よりお願いします。 ●お問い合わせは本製品に関する内容のみに限らせていただきます。お客様が本製品を用いて設計した回路、それ に起因する不具合などについてはお答えできかねますので、あらかじめご了承ください。 ●お問い合わせの前には、設計した回路が間違っていないか、組立てたときに接続を間違っていないかなど、よく ご確認ください。 <お取り扱いについて> ●子供の手の届くところに置かないでください。 ●本製品は静電気に弱い部品を使用しています。 不慮の事故を防ぐために使用しないときは導電スポンジに挿すか、 帯電防止袋に入れて保管してください。 ●電気的雑音を多く発生する機器のそばでのご使用は、誤動作の原因となりますので避けてください。 ●直接日光の当たる場所、高温になる場所、湿気やほこりが多い場所では保管しないでください。 ●本製品が「外国為替及び外国貿易法」に基づき安全保障貿易管理関連貨物・技術に該当する場合、輸出または国 外に持ち出す場合は、日本国政府の許可が必要です。 ●本製品はマイコンの学習・評価用に使用されることを意図しています。高い品質や信頼性が要求され、故障や誤 作動が直接人命を脅かしたり人体に危害を及ぼす恐れのある、医療、軍事、航空宇宙、原子力制御、運輸、移動 体、各種安全装置などの機器への使用は意図も保証もしておりません。 ●本製品の使用、 誤った使用および不適切な使用に起因するいかなる損害等についても当社は責任を負いかねます。 ●一般的に半導体を使用した製品は誤動作したり故障することがあります。半導体の誤動作や故障の結果として事 故や損害などを生じさせないように考慮した安全設計をご購入者の責任で行ってください。 <この説明書について> ●この説明書の一部、又は全部を当社の承諾なしで、いかなる形でも転載又は複製されることは堅くお断りします。 ●この取扱説明書に掲載しております内容は、本製品をご理解いただくためのものであり、その使用に関して、当 社及び第三者の知的財産権その他の権利に対する保証、又は実施権の許諾を意味するものではありません。 ●本製品・製品仕様及び取扱説明書は、改良などのため予告なく変更したり、製造を中止する場合があります。 ●本資料中の製品名および会社名は各社の商標、または登録商標です。 ◎改訂履歴 Rev. 1.00 発行日 2010/9/20 ページ - 改訂内容 初版発行 Copyright© 2010 Sunhayato Corp. 2010 年 9 月 20 日発行 REV.1.00 SG107010 ホームページ:www.sunhayato.co.jp