1
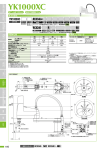
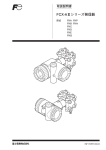
NEW RCX3 シリーズ RCX340 P.502 [ 多軸ロボットコントローラ ] POINT 1 ハイレベルな設 備 構 築が 実 現できる高度な機 能 性 高速通信により複数台ロボットの同期動作が可能になりました。コントローラ間リンクによりプログラムは一台のコン トローラに記載するだけで OK。新開発のアルゴリズムにより、位置決め時間の短縮や軌跡精度の向上も達成しました。 複数台のロボットの制御を一台のマスタコントローラで管理可能 RCX340 コントローラは、コントローラ間の高速通信が可能となりました。マスタコントローラから各スレーブのコントローラに動作 指令を出せるようになったため、プログラムやポイントは上位のマスタコントローラのみを管理するだけで OK です。また、マルチタ スクにも柔軟に対応しているため、PLC を使うやり取りも簡素化できます。各ロボットの同時スタート、同時到着も自由自在。多くの 軸を使用した複雑かつ精密なロボットシステムをより簡単に低コストにて構築可能です。 RCX340 従来方式 最大4ロボットまたは16軸の制御が1台のマスタRCX340で 管理できるようになります ● 各ロボットの同時スタート・同時到着も自由自在 ● PLC プログラム・設定は マスタが全て管理 マスタ 全てのコントローラを1台のPLCが制御。 プログラム1 プログラム2 プログラム3 LANケーブルで 接続可能 YC-Link/E プログラム設定を していないコントローラ スレーブ スレーブ スレーブ プログラム4 各コントローラにプログラムを設定、I/Oで同期をとりながら動く。 モーション機能の大幅改善によるなめらかな動きの実現 新サーボ・モーションエンジン搭載により、さまざまな動作の連結が可能になりました。新開発のアルゴリズムにより、位置決め時間 の短縮や軌跡精度の向上を達成しました。 ■ CONTオプションの機能拡張 PTPと補間動作、コンベアトラッキングなど、異種動 作の連結により高速化が図れます。 RCX340 ■ 動作速度の向上 連結PTPを使用するとすべての動作を可能な限り 連結。加減速時間が異なる動作も動作時間を優先 して最大限に連結するため、移動時間を大幅に短縮 することができます。 従来方式 【例:PTP CP】 MOVE P,P1,CONT MOVE P,P4 連結 PTP1 CP 連結 CP 指定速度で最終目標位置まで補間動作。 連結PTP動作 減速している途中から 次の動作が始まる。 【例:PTP コンベアトラッキング】 連結PTP動作 PTP1 MOVE P,P2, 連結 PTP PTP2 移動時間短縮! 連結 停止せず動作開始 CP 連結 TIME MOVE C, P2,P3,CONT CTMOVE PATH 減速し終わってから 次の動作が始まる。 PTP2 連結 MOVE P,P1, CONT ■用途による使い分け 連続動作をさせる場合、シーリングなど一定速度で 動作させる場合は従来からあるPATH、移動時間を 優先する場合は連結PTPと、用途に適した動作を選 択可能です。 TIME ● 連結を前提としてPTP1/PTP2の動作パタンを計算。 ● 連結する動作の種類によらず最大限連結できるた め連結効果大。 PTP PTP ● 最終目標位置までの移動時間が最短となるように PTP動作。 61 Controllers 製品ラインナップ より直感的なアーチモーションの指定が可能 アーチモーションの経路指定の方法を変更することにより、指定方法が簡素化したうえ、より直感的な指定が可能となりました。 RCX340 従来方式 ● 全軸のパラメータの指定が必要 ● 経路が調整しにくい ●パラメータ指定はアーチ軸のみ ●経路調整が容易 XYRパラメータで指定 第2動作(X&Y) Zパラメータで指定 第2動作(X&Y) 第3動作(Z) 第1動作(Z) 第1動作(Z) 障害物 第3動作(Z) 障害物 Zパラメータ指定 Zパラメータ指定 自由な軸構成により、多種多様なアプリケーションに対応可能 例:デュアルレーンでの補間動作 マルチ座標軸設定と CP コマンドの軸指定対応により、デュアルレーンでの補間動作なども可能になりました。 同座標属性の軸が複数 あるロボットの大幅なサイクルタイム短縮を実現できます。 RCX340 従来方式 A3/A4の入れ替えが終了してから ようやくA4のシーリング開始 A2-Z A1/A2のシーリング位置への移動が 完了したらすぐにA4のシーリング開始 A2-Z A2-Z A1-X A1-X シーリング A3-Y A3-Y A1-X A1/A2/A3を 指定して シーリング A4-Y A3-Y A4-Y A4も指定軸となるため別動作不可 同じ目標位置で待機 A2-Z A1-X A4-Y A4はタスク2で シーリング位置へ移動 A3のシーリング中は動作不可 シーリングが終了してから A3/A4入れ替え ● ● A3-Y A4-Y A3はタスク2で ワークセット位置へ移動 シーリングは対象軸のみを指定 その他の軸は別タスクで別動作を並列して実行可 奇跡精度の向上 サーボアナライズ機能による可視化と、 新サーボ機能による高応答化により、追 RCX340 RCX240 従性がアップし従来機種と比較して軌跡 精度が向上しました。 15mm/秒 500mm/秒 15mm/秒 500mm/秒 62 軌跡ズレが大幅低減 POINT 2 レベルアップした基 本 性能 ロボット言語、マルチタスク、シーケンス機能、通信、フィールドバスなどの機能をさらに使いやすく向上させました。 モーションの最適化 コンパクト設計 ロボットの性能を最大限に引き出すため、動作パターンに合わせた 外寸は約 355mm(W)×195mm(H)×130mm(D)。従来の 4 軸コ モーションの最適化をさらに強化しました。動作タイムの短縮や停 ントローラと比較して体積比約 85%と小型化を実現し、制御盤 止時の振動抑制など、より質の高いロボット動作を実現します。 内への設置を容易にしました。 ■最適な加減速モーション 振動を抑えつつ高速な動作ができる加減速モーションを生成します。 RCX340 RCX240 データテーブルの追加 RCX240に比べて、 約15%の小型化。 サイクルタイムの向上 ユーザーメモリ容量アップ YK-XG シリーズで高速化を実現しました。 例:YK400XG ● 標準サイクルタイム動作 0.49sec → 0.45sec ● RCX340 RCX240 移動時間(msec) 800 ポイント数の大幅増加 RCX240 10,000ポイント RCX340 30,000ポイント ● シーケンスプログラム容量アップ 600 400 200 0 0 30 60 90 120 アーム旋回角度( ) 150 180 視認性・操作性が向上したサポートツール 新サポートソフト RCX-Studio プログラムデバック機能を強化し、マルチタスクにも対応しています。使いやすい操作性、プログラム入力支援機能により、すばやい セットアップが可能です。 ■ヤマハロボットをより使いやすく、 より早くセットアップ / 効率的にメンテナンス ●使いやすい操作系 操作項目と データのリスト ●プログラムデバッグ機能強化・ マルチタスクにも対応 ●プログラム入力支援機能 命令後の候補と 使い方が表示される 各種エディタ 複数のタスクのデバッグ 情報を同時に表示 各種モニタパネル配置変えや フローティング表示も可能 ■新プログラミングボックスPBX 「日本語」 「 英語」 「 中国語」の3言語に対応。カラーディスプレイにより視認性が向上しました。 機能追加・修正作業が簡単になり、 プログラミング知識が無い方でも操作可能です。 USBメモリにコントローラデータを保存する機能も搭載しています。 63 Controllers 製品ラインナップ POINT 3 一 段と充 実した拡張 性 RS-232C と Ethernet ポートを標準で装備。オプションで CC-Link、 DeviceNet に加え、 EtherNet/IP といった高速・ 大容量の幅広いフィールドネットワークに対応します。汎用サーボアンプとの連結や、他社 VISION との連結も容易 で、RCX340 はまさに “ つながるコントローラ ” と呼べるでしょう。 コントローラ間通信 YC-Link / E RCX340を最大4台(最大制御軸数16軸)まで接続可能 より柔軟なロボット構成 複数台のロボットを集中管理 多彩なフィールドバスに対応 / 最大4台接続でロボットを集中管理 RS-232C、Etehrnet ポートを標準で装備。そのほか CC-Link、EtherNet/IP、DeviceNet、Profibus ※ 1 など充実したフィールドバス に対応可能で、 多種多様なデバイスとの接続、 制御を行うことができます。5軸以上の場合、 YC-Link/E を使うことで RCX340 コントロー ラを最大4台接続できるので、複数台のロボットを集中管理できます。 ※ 1. 2014 年9月対応予定 集中プログラム管理 標準装備 Ethernet RCX340を最大4台 (16軸) 接続可能 YC-Link / E 他社サーボアンプと繋いでより柔軟なロボット構成も可能 RCX340 の代わりに他社サーボアンプを使いロボットの軸として動かすことも可能です。また、従来機種では軸の割り当てが固定パ ターンより選択しなくてはならなかったり、XYZR の座標属性が内部で固定されていたりとロボット構成の制約がありました。しかし、 RCX340 コントローラは座標属性は自由に設定でき、色々なロボット構成に対応可能です。 ※ 1. 対応機種は弊社までお問合せください。 汎用サーボアンプ※1 汎用モータ 64 アプリケーション LCM100 リニアコンベアモジュール RCX340 ● 高機能ロボットコントローラ 従来のコントローラの機能をさらに向上させるため、全ての機能を見直した次世代コントローラ。 ハイレベルな設備構築が実現できる高度な機能性が特長です。 TRANSERVO 小型単軸ロボット FLIP-X 単軸ロボット 主な特長 ▶ P.61 特長 1 複数台ロボットの同期動作が可能 5 軌跡精度の向上 高速通信と衝突防止機能の強化により複数台ロボットの 同期動作が可能となりました。 PHASER リニア単軸ロボット 2 複数台ロボットの管理も一台のマスタ コントローラのみ XY-X 直交ロボット 最大4ロボット、16軸の制御が一台のマスタRCX340 コントローラで管理できます。 各ロボットの同時スタート、同時到着も自由自在に行え ます。 新サーボ機能による高応答化により追従性がアップし、 従来機種と比較して軌跡制度が向上しました。 6 モーションの最適化 ロボットの性能を最大限に引き出すため、動作パターン に合わせたモーションの最適化をさらに強化しました。 7 接続機能の向上 RC-232C、Ethernetポートを標準装備。 その他CC-Link 、EtheNet/IP 、DeviceNet など充実した 3 モーション機能の大幅改善でなめらか YK-XG スカラロボット な動きを実現 新サーボ・モーションエンジンの搭載により、様々な動作 の連結が可能となり、位置決め時間の短縮や軌跡精度の向 上を達成しました。 フィールドバスに対応可能です。 ■ 外観図 ●RCX340 355 10.5 YP-X ピック&プレイス 4 より直感的なアーチモーションの指定 3-φ5.5 OPTION 1 3 2 4 1 3 2 4 PWR が可能 PB クリーン CLEAN 従来全軸のパラメータの指定が必要だったのに対し、 RCX340ではアーチ軸のみとなり、より直感的な指定が 可能となりました。 195 225 213 APPLICATION 1 ~ 4軸 COM ROB I/O 1-2 SAFETY ROB I/O 3-4 AC IN L N L1 N1 (PE) M1 M1 BAT1 BAT2 M2 M3 BAT3 M4 BAT4 EN USB 22.5 130 155 5.5 155 コントローラ 各種情報 CONTROLLER INFORMATION ■ 注文型式 RCX340 ー ー ー ー ー ー ー ー 適用コントローラ ー 制御軸数 ー 安全規格 ー コントローラオプションA ー コントローラオプションB ー コントローラオプションC ー コントローラオプションD ー コントローラオプションE ー アブソ (OP.A) バッテリ (OP.B) (OP.C) (OP.D) (OP.E) 4 : 4軸 N : ノーマル 3 : 3軸 2 : 2軸 E : CE ロボット ポジショナ パルス列 ドライバ 無記入 : 選択なし NS : STD.DIO(NPN) ※1 ※4 NE : EXP.DIO(NPN) ※2 ※4 PS : STD.DIO(PNP) ※1 ※4 PE : EXP.DIO(PNP) ※2 ※4 GR : グリッパ ※8 TR : トラッキング ※5 ※9 YM: YC-Link/Eマスタ ※6 ※11 YS : YC-Link/Eスレーブ ※6 EP : Ethernet/IP ※7 PB : Profibus ※7 ※10 CC : CC-Link ※7 DN : DeviceNet ※7 無記入 : 選択なし 無記入 : 選択なし 無記入 : 選択なし 無記入 : 選択なし --- ※3 NE : EXP.DIO(NPN) ※2 ※4 --- ※3 PE : EXP.DIO(PNP) ※2 ※4 GR : グリッパ ※8 TR : トラッキング ※5 ※9 YM: YC-Link/Eマスタ ※6 ※11 YS : YC-Link/Eスレーブ ※6 ※11 EP : Ethernet/IP ※7 PB : Profibus ※7 ※10 CC : CC-Link ※7 DN : DeviceNet ※7 --- ※3 NE : EXP.DIO(NPN) ※2 ※4 --- ※3 PE : EXP.DIO(PNP) ※2 ※4 GR : グリッパ ※8 TR : トラッキング ※5 ※9 YM: YC-Link/Eマスタ ※6 ※11 YS : YC-Link/Eスレーブ ※6 ※11 EP : Ethernet/IP ※7 PB : Profibus ※7 ※10 CC : CC-Link ※7 DN : DeviceNet ※7 --- ※3 NE : EXP.DIO(NPN) ※2 ※4 --- ※3 PE : EXP.DIO(PNP) ※2 ※4 GR : グリッパ ※8 TR : トラッキング ※5 ※9 YM: YC-Link/Eマスタ ※6 ※11 YS : YC-Link/Eスレーブ ※6 ※11 EP : Ethernet/IP ※7 PB : Profibus ※7 ※10 CC : CC-Link ※7 DN : DeviceNet ※7 VY : iVY照明なし ※9 LC : iVY照明付き ※9 ロボット iVY/ コントローラ 電動グリッパ コントローラオプションAから順番に選択項目の上段にある項目から選択してください。 ※1.【STD.DIO】パラレルI/Oボード標準仕様 専用入力8点、専用出力9点、汎用入力16点、汎用出力8点 ※2.【EXP.DIO】パラレルI/Oボード拡張仕様 汎用入力24点、汎用出力16点 ※3. DIOのSTD仕様は1枚のみ選択可能なため、 OP.B ∼ OP.Dでは 選択できません。 ※4. DIOのNPNとPNPは混在しないようにご注意ください。 ※5. トラッキングボードは一枚のみ選択可能です。 ●コントローラオプション ※6. YC-Link/Eはマスタまたはスレーブの一枚のみお選びください。 ※7. フィールドバス(CC/DN/PB/EP)は混在させないでください。 ※8. グリッパ:2014年7月対応予定 ※9. トラッキング・iVY:2014年8月対応予定 ※10. Profibus:2014年9月対応予定 ※11. YC-Link/E:2014年7月対応予定 1 OPTION 1 3 2 4 3 PWR OP.A OP.B PB COM ROB I/O 1-2 2 4 SAFETY ROB I/O 3-4 AC IN OP.C L N L1 N1 (PE) M1 BAT1 M1 BAT2 M2 BAT3 M3 BAT4 OP.D M4 オプション EN USB 502 4 : 4個 3 : 3個 2 : 2個 1 : 1個 0 : 0個 YK-XG YP-X ピック&プレイス CLEAN クリーン 外部入出力 コントローラ 各種情報 一般仕様 CONTROLLER INFORMATION パルス列 ドライバ オプションボード オプション ロボット ポジショナ ロボット iVY/ コントローラ 電動グリッパ システムバックアップ リチウム電池(0 ∼ 40℃で約4 年間有効) (内部メモリバックアップ) 非常停止レディ入力2 系統 入力 自動モード入力2 系統(グローバル仕様のみ有効) 非常停止接点出力2 系統 SAFETY イネーブル接点出力2 系統(PBX-E 使用時のみ有効) 出力 モータパワーレディ出力2 系統 ブレーキ出力 トランジスタ出力(PNPオープンコレクタ) 原点センサ入力 DC24V B 接センサ接続 RS-232C : 1CH(D-SUB 9 ピン(メス)) Ethernet : 1CH(IEEE802.3u/IEEE802.3 準拠 100Mbps/10Mbps(100BASE-TX/10BASE-T) 外部通信 Auto Negotiation 対応 :1CH(B タイプ) USB RS-422 :1CH(PBX専用) 使用温度 0℃∼ 40℃ 保存温度 −10℃∼ 65℃ 使用湿度 35% ∼ 85%RH(結露なきこと) ノイズ耐量 IEC61000-4-4 レベル3 保護構造 IP20 オプションスロット 4 スロット 専用入力8 点 専用出力9 点 汎用入力16 点 汎用出力8 点 標準仕様 パラレル (最大1 ボード、NPN/PNP 仕様選択) ボード I/O 汎用入力24 点 汎用出16 点 拡張仕様 (最大4 ボード、NPN/PNP 仕様選択) CC-Link ボード 4 局占有 Ver2.0 専用入力 16 点、専用出力 16 点 汎用入力 96 点、汎用出力 96 点 DeviceNet ボード EtherNet/IP ボード プログラミングボックス PBX、PBX-E パソコン用サポートソフト RCX-Studio アブソバッテリ 3.6V 2750mAH / 軸 バックアップ保持期間:約1 年 スカラロボット ポイント教示方式 XY-X ポイント 直交ロボット プログラム PHASER メモリ容量 リニア単軸ロボット プログラミング プログラム言語 マルチタスク シーケンスプログラム FLIP-X 軸制御 加減速度設定 レゾルバ、磁気式リニアスケール PTP 動作(Point to Point)、アーチモーション、直線補間、円弧補間 関節座標、直交座標 パルス、ミリ(1/1000 単位)、度(1/1000 単位) 1 ∼ 100%(1% 単位設定、プログラムでの変更可能) ロボット型式および先端質量パラメータによる自動加速度設定 加速度および減速率パラメータによる設定(1% 単位設定) ※プログラムでの変更可能 ゾーン制御(スカラ型ロボットのみ、アーム姿勢に応じた最適化速度) ヤマハ BASIC Ⅱ(JIS B8439(SLIM 言語)準拠) 最大16 タスク 1 プログラム 2.1MB(プログラムとポイントの合計容量) (最大ポイント数使用時のプログラム使用可能容量は、300KB) 100 プログラム(最大プログラム数) 9999 行(1 プログラム最大行数) 30000 ポイント(最大ポイント数) MDI(座標値入力)、ダイレクトティーチ、ティーチングプレーバック、オフラインティーチ(外部からのデータ 入力) 単軸ロボット 制御軸数 駆動方式 位置検出方式 制御方式 座標系 位置表示単位 速度設定 2500VA W355 × H195 × D130mm(本体のみ) 6.2kg(本体のみ) 単相 AC200V ∼ 230V ±10% 以内、50/60Hz 最大4 軸(同時制御:6 軸) YC-Link/Eにより最大16 軸(4 ロボット)まで拡張可能 AC フルデジタルサーボ 小型単軸ロボット 接続モータ容量 電源容量 外形寸法 重量 使用電源電圧 TRANSERVO 基本仕様 適用ロボット RCX340 単軸ロボット、リニア単軸ロボット、直交型ロボット、スカラ型ロボット(YK120X、YK150X を除く)、 ピック& プレイスロボット 4 軸合計 1600W 以下 LCM100 項目 リニアコンベアモジュール ■ 基本仕様 アプリケーション http://www.yamaha-motor.co.jp/robot/ APPLICATION RCX340 取扱説明書は弊社WEBサイトよりダウンロードできます。詳細をご確認いただく場合は、こちらをご利用ください。 オプション 503