1
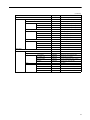
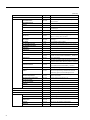
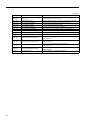
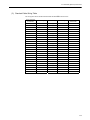
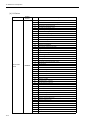
B System Registers Lists B.2 Scan Execution Status and Calendar Name Register No. Remarks High-speed Scan Set Value SW00004 High-speed Scan Set Value (0.1 ms) High-speed Scan Current Value SW00005 High-speed Scan Current Value (0.1 ms) High-speed Scan Maximum Value SW00006 High-speed Scan Maximum Value (0.1 ms) Reserved by the system. SW00007 to SW00009 (Not used) Low-speed Scan Set Value SW00010 Low-speed Scan Set Value (0.1 ms) Low-speed Scan Current Value SW00011 Low-speed Scan Current Value (0.1 ms) Low-speed Scan Maximum Value SW00012 Low-speed Scan Maximum Value (0.1 ms) Reserved by the system. SW00013 (Not used) Executing Scan Current Value SW00014 Executing Scan Current Value (0.1 ms) Calendar: Year SW00015 1999: 0099 (BCD) (Last two digits only) Calendar: Month Day SW00016 December 31: 1231 (BCD) Calendar: Hours Minutes SW00017 23 hours 59 minutes: 2359 (BCD) Calendar: Seconds SW00018 59 s: 59 (BCD) Calendar: Day of Week SW00019 0 to 6: Sun., Mon. to Sat. B.3 Program Software Numbers and Remaining Program Memory Capacity Name Name B-4 Register No. Remarks System Program Software Number SW00020 S ( is stored as BCD) System Number SW00021 to SW00025 (Not used) Remaining Program Memory Capacity SW00026 Bytes Total Memory Capacity SW00028 Bytes