1
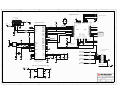
Stellaris® LM3S2965 Evaluation Board User ’s Manual EK-LM3S296 5-08 Co pyrigh t © 2 007– 201 0 Te xas In strumen ts Copyright Copyright © 2007–2010 Texas Instruments, Inc. All rights reserved. Stellaris and StellarisWare are registered trademarks of Texas Instruments. ARM and Thumb are registered trademarks, and Cortex is a trademark of ARM Limited. Other names and brands may be claimed as the property of others. Texas Instruments 108 Wild Basin, Suite 350 Austin, TX 78746 http://www.ti.com/stellaris 2 January 6, 2010 Stellaris® LM3S2965 Evaluation Board Table of Contents Chapter 1: Stellaris® LM3S2965 Evaluation Board ....................................................................................... 7 Features.............................................................................................................................................................. 8 Block Diagram .................................................................................................................................................... 9 Evaluation Kit Contents .................................................................................................................................... 10 Evaluation Board Specifications ................................................................................................................... 10 CAN Device Board Specifications................................................................................................................. 10 Features of the LM3S2965 Microcontroller....................................................................................................... 10 Chapter 2: Hardware Description .................................................................................................................. 13 LM3S2965 Evaluation Board ............................................................................................................................ 13 LM3S2965 Microcontroller Overview ............................................................................................................ 13 CAN Module.................................................................................................................................................. 13 Clocking ........................................................................................................................................................ 13 Reset............................................................................................................................................................. 13 Power Supplies ............................................................................................................................................. 14 Debugging..................................................................................................................................................... 14 USB Functions.................................................................................................................................................. 15 USB Overview............................................................................................................................................... 15 USB to JTAG/SWD ....................................................................................................................................... 15 Virtual COM Port........................................................................................................................................... 15 Serial Wire Out.............................................................................................................................................. 15 Organic LED Display ........................................................................................................................................ 15 Features........................................................................................................................................................ 15 Control Interface ........................................................................................................................................... 16 Power Supply................................................................................................................................................ 16 Design Guidelines......................................................................................................................................... 16 Further Reference......................................................................................................................................... 16 Other Peripherals.............................................................................................................................................. 16 Speaker......................................................................................................................................................... 16 Push Switches .............................................................................................................................................. 16 User LED ...................................................................................................................................................... 16 Bypassing Peripherals ...................................................................................................................................... 16 Interfacing to the EVB....................................................................................................................................... 17 Using the In-Circuit Debugger Interface ........................................................................................................... 17 Chapter 3: CAN Device Board Hardware Description ................................................................................. 19 Device Overview............................................................................................................................................... 19 Power Supply................................................................................................................................................ 19 Programming and Debugging ....................................................................................................................... 19 Interfacing ..................................................................................................................................................... 19 Appendix A: Schematics................................................................................................................................ 21 Appendix B: Connection Details ................................................................................................................... 27 Component Locations....................................................................................................................................... 27 Evaluation Board Dimensions........................................................................................................................... 28 January 6, 2010 3 I/O Breakout Pads ............................................................................................................................................ 29 Recommended Connectors .............................................................................................................................. 30 ARM Target Pinout ........................................................................................................................................... 31 References ....................................................................................................................................................... 31 4 January 6, 2010 Stellaris® LM3S2965 Evaluation Board List of Figures Figure 1-1. Figure 1-2. Figure 1-3. Figure 1-4. Figure 2-1. Figure B-1. Figure B-2. Figure B-3. Figure B-4. Stellaris LM3S2965 Evaluation Board Layout ................................................................................. 7 Stellaris LM3S2110 CAN Device Board .......................................................................................... 8 LM3S2965 Evaluation Board Block Diagram .................................................................................. 9 LM3S2110 CAN Device Board Block Diagram ............................................................................... 9 ICD Interface Mode ....................................................................................................................... 18 Component Locations ................................................................................................................... 27 LM3S2965 Evaluation Board Dimensions..................................................................................... 28 LM3S2110 CAN Device Board Dimensions .................................................................................. 28 LM3S2110 CAN Device Board Connections................................................................................. 30 January 6, 2010 5 List of Tables Table 2-1. Table 2-2. Table B-1. Table B-2. Table B-3. 6 Stellaris LM3S2965 Evaluation Board Hardware Debugging Configurations................................ 14 Isolating On-Board Hardware........................................................................................................ 17 I/O Breakout Pads ......................................................................................................................... 29 Recommended Connectors........................................................................................................... 30 20-Pin JTAG/SWD Configuration .................................................................................................. 31 January 6, 2010 C H A P T E R 1 Stellaris® LM3S2965 Evaluation Board The Stellaris® LM3S2965 Evaluation Board is a compact and versatile evaluation platform for the Stellaris LM3S2965 ARM® Cortex™-M3-based microcontroller. The evaluation kit demonstrates a complete controller area network (CAN) using two Stellaris microcontrollers. The main evaluation board (EVB) configures a Stellaris LM3S2965 microcontroller as a CAN host. A small CAN device board, linked with a ribbon cable, uses a Stellaris LM3S2110 microcontroller. The function of each board is fully configurable in software. You can use the board either as an evaluation platform or as a low-cost in-circuit debug interface (ICDI). In debug interface mode, the on-board microcontroller is bypassed, allowing for programming or debugging of an external target. The kit is also compatible with high-performance external JTAG debuggers. This evaluation kit enables quick evaluation, prototype development, and creation of applicationspecific designs for CAN. The kit also includes extensive source-code examples, allowing you to start building C code applications quickly. Figure 1-1. Stellaris LM3S2965 Evaluation Board Layout JTAG/SWD input and output Reset switch Debug-out LED Navigation Switches Power LED Speaker Status LED Select switch OLED Graphics Display 40 pin I/O break -out header Stellaris® LM3S2965 Microcontroller USB Device Interface January 6, 2010 34 pin I/O break -out header In-circuit Debug Interface CAN bus connector 7 Stellaris® LM3S2965 Evaluation Board Figure 1-2. Stellaris LM3S2110 CAN Device Board JTAG/SWD input Status LED Power LED Reset switch Stellaris® LM3S2110 Microcontroller I/O break -out headers User switches CAN bus connector Features The Stellaris LM3S2965 Evaluation Kit includes the following features: 8 Stellaris LM3S2965 microcontroller with fully-integrated CAN module Standalone CAN device board using Stellaris LM3S2110 microcontroller Simple setup; USB cable provides serial communication, debugging, and power OLED graphics display with 128 x 96 pixel resolution User LED, navigation switches, and select pushbuttons Magnetic speaker LM3S2965 I/O available on labeled break-out pads Standard ARM® 20-pin JTAG debug connector with input and output modes USB interface for debugging and power supply January 6, 2010 Stellaris® LM3S2965 Evaluation Board Block Diagram LM3S2965 Evaluation Board Block Diagram Target Cable Figure 1-3. I/O Signal Break-out Dual USB Device Controller Stellaris LM3S2965 Microcontroller UART0 USB CAN CAN PHY LED Switch CAN0 +3.3V Regulator Nav Switch Reset Speaker I/O Signal Break-out I/O Signal Break-out LM3S2965 CAN Evaluation Board Figure 1-4. I/O Signals OLED Display 128 x 96 SWD/JTAG Mux USB USB Cable Debug I/O Signal Break-out JTAG/SWD Output/Input LM3S2110 CAN Device Board Block Diagram I/O Signal Break-out JTAG/SWD Input +3.3V Regulator LED Debug Stellaris LM3S2110 Microcontroller USB CAN CAN PHY CAN0 I/O Signals Reset Switch Switch LM3S2110 CAN Device Board I/O Signal Break-out January 6, 2010 9 Stellaris® LM3S2965 Evaluation Board Evaluation Kit Contents The evaluation kit contains everything needed to develop and run applications for Stellaris microcontrollers including: LM3S2965 evaluation board (EVB) LM3S2110 CAN device board USB cable 20-pin JTAG/SWD target cable 10-pin CAN cable CD containing: – A supported version of one of the following (including a toolchain-specific Quickstart guide): • Keil™ RealView® Microcontroller Development Kit (MDK-ARM) • IAR Embedded Workbench • Code Sourcery GCC development tools • Code Red Technologies development tools • Texas Instruments’ Code Composer Studio™ IDE – Complete documentation – Quickstart application source code – Stellaris® Firmware Development Package with example source code Evaluation Board Specifications Board supply voltage: 4.37–5.25 Vdc from USB connector Board supply current: 120 mA typ (fully active, CPU at 50 MHz) 200 mA (fully active, with sound) Break-out power output: 3.3 Vdc (60 mA max), 12 Vdc (15 mA max) Dimensions: 4.1” x 2.45” x 0.7” (LxWxH) CAN Device Board Specifications Board supply voltage: 4.0-5.0 Vdc from CAN connector Board supply current: 40 mA typical Dimensions: 2.45” x 1.60” (LxW) Features of the LM3S2965 Microcontroller 32-bit RISC performance using ARM® Cortex™-M3 v7M architecture – 50-MHz operation – Hardware-division and single-cycle-multiplication – Integrated Nested Vectored Interrupt Controller (NVIC) – 27 interrupt channels with eight priority levels 10 January 6, 2010 Stellaris® LM3S2965 Evaluation Board 256-KB single-cycle flash 64-KB single-cycle SRAM Four general-purpose 32-bit timers Controller area network (CAN) module Three fully programmable 16C550-type UARTs Four 10-bit channels (inputs) when used as single-ended inputs Three independent integrated analog comparators Two I2C modules Three PWM generator blocks – One 16-bit counter – Two comparators – One PWM generator – One dead-band generator Two QEI modules with position integrator for tracking encoder position Two synchronous serial interfaces (SSIs) 3 to 56 GPIOs, depending on user configuration On-chip low drop-out (LDO) voltage regulator January 6, 2010 11 Stellaris® LM3S2965 Evaluation Board 12 January 6, 2010 C H A P T E R 2 Hardware Description In addition to a microcontroller, the Stellaris LM3S2965 evaluation board includes a range of useful peripherals and an integrated ICDI. This chapter describes how these peripherals operate and interface to the microcontroller. LM3S2965 Evaluation Board LM3S2965 Microcontroller Overview The heart of the EVB is a Stellaris LM3S2965 ARM Cortex-M3-based microcontroller. The LM3S2965 offers 256-KB flash memory, 50-MHz operation, a CAN module, and a wide range of peripherals. Refer to the LM3S2965 data sheet (order number DS-LM3S2965) for complete device details. The LM3S2965 microcontroller is factory programmed with a quickstart demo program. The quickstart program resides in the LM3S2965 on-chip flash memory and runs each time power is applied, unless the quickstart has been replaced with a user program. CAN Module A key feature of the LM3S2965 is its CAN module that enables highly reliable communications at up to 1 Mbits/s. The LM3S2965 evaluation board includes a standard CAN transceiver and a 10-pin CAN connector whose signal assignments follow a commonly used CAN standard. A simple adaptor (not included in the kit) can be used to allow the use of standard DB-9 CAN cables. An on-board 120-ohm resistor provides bus termination. This resistor can be removed if the board is not a network endpoint. The CAN transceiver is configured in hardware to support speeds up to 1 Mbits/s. A resistor can be added to reduce the transceiver's drive slew-rate for slower data rates over longer distances. Clocking The LM3S2965 microcontroller has three on-chip oscillators, two are implemented on the EVB. A 8.0-MHz crystal completes the LM3S2965’s main internal clock circuit. An internal PLL, configured in software, multiples this clock to 50-MHz for core and peripheral timing. At initial power on, the microcontroller operates directly from a 12-MHz internal oscillator. Reset The LM3S2965 microcontroller shares its external reset input with the OLED display. In the EVB, reset sources are gated through the CPLD, though in a typical application a simple wired-OR arrangement is sufficient. Reset is asserted (active low) under any one of three conditions: Power-on reset Reset push switch SW1 held down Internal debug mode—By the USB device controller (U5 FT2232) when instructed by debugger January 6, 2010 13 Hardware Description Power Supplies The LM3S2965 is powered from a +3.3-V supply. A low drop-out (LDO) regulator regulates +5-V power from the USB cable to +3.3-V. +3.3-V power is available for powering external circuits. A +15-V rail is available when the OLED display is active. The speaker and OLED display boostconverter operate directly from the +5-V rail. Debugging Stellaris microcontrollers support programming and debugging using either JTAG or SWD. JTAG uses the signals TCK, TMS, TDI, and TDO. SWD requires fewer signals (SWCLK, SWDIO, and, optionally, SWO, for trace). The debugger determines which debug protocol is used. Debugging Modes The LM3S2965 evaluation board supports a range of hardware debugging configurations. Table summarizes these. Table 2-1. Stellaris LM3S2965 Evaluation Board Hardware Debugging Configurations Mode Debug Function Use Selected by 1 Internal ICDI Debug on-board LM3S2965 microcontroller over USB interface. Default mode 2 ICDI out to JTAG/SWD header The EVB is used as a USB to SWD/JTAG interface to an external target. Connecting to an external target and starting debug software. The red Debug Out LED will be ON. 3 In from JTAG/SWD header For users who prefer an external debug interface (ULINK, JLINK, etc.) with the EVB. Connecting an external debugger to the JTAG/SWD header Modes 2 and 3 automatically detect the presence of an external debug cable. When the debugger software is connected to the EVB's USB controller, the EVB automatically selects Mode 2 and illuminates the red Debug Out LED. ICDI out (Mode 2) can be used to program and debug the small LM3S2110 CAN device board included in the kit. Debug In Considerations Debug Mode 3 supports evaluation board debugging using an external debug interface. Mode 3 is automatically selected when a device such as a Segger J-Link or Keil ULINK is connected. Boards marked Revision C or later automatically configure pin 1 to be a 3.3-V reference, if an external debugger is connected. To determine the revision of your board, locate the product number on the bottom of the board; for example, EK-LM3S2965-C. The last character of the product number identifies the board revision. A configuration or board-level change may be necessary when using an external debug interface with revisions A and B of this evaluation board. Because the evaluation board supports both debug out and debug in modes, pin 1 of the 20-pin JTAG/SWD header is, by default, not connected to +3.3 V. Consequently, devices requiring a voltage on pin 1 to power their line buffers may not work. 14 January 6, 2010 Stellaris® LM3S2965 Evaluation Board Two solutions exist. Some debugger interfaces (such as ULINK) have an internal power jumper that, in this case, should be set to internal +3.3-V power. Refer to debugger interface documentation for full details. However, if your debugger interface does not have a selectable power source, it may be necessary to install a 0-Ω resistor on the evaluation board to route power to pin 1. Refer to the schematics and board drawing in the appendix of this manual for the location of this resistor. USB Functions USB Overview An FT2232 device from Future Technology Devices International Ltd manages USB-to-serial conversion. The FT2232 is factory configured to implement a JTAG/SWD port (synchronous serial) on channel A and a Virtual COM Port (VCP) on channel B. This feature allows two simultaneous communications links between the host computer and the target device using a single USB cable. Separate Windows drivers for each function are provided on the Documentation and Software CD. A small serial EEPROM holds the FT2232 configuration data. The EEPROM is not accessible by the LM3S2965 microcontroller. For full details on FT2232 operation, go to www.ftdichip.com. USB to JTAG/SWD The FT2232 USB device performs JTAG/SWD serial operations under the control of the debugger. A CPLD (U4) multiplexes SWD and JTAG functions and, when working in SWD mode, provides direction control for the bidirectional data line. Virtual COM Port The Virtual COM Port (VCP) allows Windows applications (such as HyperTerminal) to communicate with UART0 on the LM3S2965 over USB. Once the FT2232 VCP driver is installed, Windows assigns a COM port number to the VCP channel. Serial Wire Out The evaluation board supports the Cortex-M3 serial-wire output (SWO) trace capabilities. Under debugger control, the CPLD can route the SWO datastream to the virtual communication port (VCP) transmit channel. The debugger can then decode and interpret the trace information received from the VCP. The normal VCP connection to UART0 is interrupted when using SWO. Not all debuggers support SWO. Refer to the Stellaris LM3S3748 data sheet for additional information on the trace port interface unit (TPIU). Organic LED Display The EVB features an Organic LED (OLED) graphics display with 128 x 64 pixel resolution. OLED is a new technology that offers many advantages over LCD display technology. Features RiT P14201 series display 128 columns by 96 rows High-contrast (typ. 500:1) Excellent brightness (120 cd/m2) January 6, 2010 15 Hardware Description Fast response Control Interface The OLED display has a built-in controller IC with synchronous serial and parallel interfaces. Synchronous serial (SSI) is used on the EVB as it requires fewer microcontroller pins. Data cannot be read from the OLED controller; only one data line is necessary. Stellaris® Firmware Development Package (included on the Documentation and Software CD) contains complete drivers with source-code for the OLED display. Power Supply A +15-V supply is needed to bias the OLED display. A FAN5331 device from Fairchild combines with a few external components to complete a boost converter. A few external components complete the switching power supply. When the OLED display is operating, a small amount of power can be drawn from the +12-V rail to power other devices. Design Guidelines The OLED display has a lifetime of about 13,000 hours. It is also prone to degradation due to burn-in, similar to CRT and plasma displays. The quickstart application includes both a screen saver and a power-down mode to extend display life. These factors should be considered when developing EVB applications that use the OLED display. Further Reference For additional information on the RiT OLED display, visit www.ritekdisplay.com. Other Peripherals Speaker A small, magnetic audio transducer connects through a MOSFET to PD1/PWM1, allowing a range of options for generating simple and complex tones. Use of the +5-V rail reduces switching noise on the +3.3-V rail. Push Switches The EVB has five general-purpose input switches. Four are arranged in a navigation-style configuration. The fifth functions as a Select switch. User LED A user LED (LED1) is provided for general use. The LED is connected to PG2/PWM0, allowing the option of either GPIO or PWM control (brightness control). Refer to the Quickstart Application source code for an example of PWM control. Bypassing Peripherals Excluding CAN and JTAG, the EVB’s on-board peripheral circuits require 13 GPIO lines. This leaves 40 GPIO lines and 4 ADC channels immediately available for connection to external circuits. If an application requires more GPIO lines the on-board hardware can be disconnected. The EVB is populated with 3 jumper links, which can be cut with a knife to isolate on-board hardware. The process can be reversed by installing 0603- 0-ohm chip resistors. 16 January 6, 2010 Stellaris® LM3S2965 Evaluation Board Important: The quickstart application will not run if one or more jumpers are removed. Table 2-2. Isolating On-Board Hardware MCU Pin MCU Assignment To Isolate, Remove... Pin 26 PA0/U0RX Virtual COM port receive JP1 Pin 27 PA1/U0TX Virtual COM port transmit JP2 Pin 16 PG3/PWM1 Sound JP5 Pin 31 PA5/SSI0TX OLED display data in JP7 Pin 28 PA2/SSI0CLK OLED display clock JP6 Pin 22 PC7/C2- OLED display data/control select JP3 Pin 29 PA3/SSI0FSS OLED display chip select JP4 Pin 46 PF5 Down switch JP8 Pin 43 PF6 Left switch JP9 Pin 58 PF4 Up switch JP10 Pin 42 PF7 Right switch JP11 Pin 41 PG4 Select switch JP12 Pin 47 PG2/PWM0 User LED JP13 Pin 23 PC6/C2+ Enable +15 V JP14 Interfacing to the EVB An array of accessible I/O signals makes it easy to interface the EVB to external circuits. All LM3S2965 I/O lines (except those with both JTAG and SWD functions) are brought out to 0.1” pitch pads. For quick reference, silk-screened labels on the PCB show primary pin functions. Table B-1 on page 29 has a complete list of I/O signals as well as recommended connectors. Most LM3S2965 I/O signals are +5-V tolerant. Refer to the LM3S2965 data sheet for detailed electrical specifications. Using the In-Circuit Debugger Interface The Stellaris LM3S2965 Evaluation Kit can operate as an In-Circuit Debugger Interface (ICDI). ICDI acts as a USB to the JTAG/SWD adaptor, allowing debugging of any external target board that uses a Stellaris microcontroller. See “Debugging Modes” on page 14 for a description of how to enter Debug Out mode. January 6, 2010 17 Hardware Description Figure 2-1. ICD Interface Mode Connecting Pin 18 to GND sets external debug mode Evaluation Board USB ` PC with IDE/ debugger Stellaris MCU JTAG or SWD connects to the external microcontroller Target Cable Stellaris MCU Target Board TCK/SWCLK bypasses the on- board microcontroller The debug interface operates in either serial-wire debug (SWD) or full JTAG mode, depending on the configuration in the debugger IDE. The IDE/debugger does not distinguish between the on-EVB Stellaris microcontroller and an external Stellaris microcontroller. The only requirement is that the correct Stellaris device is selected in the project configuration. 18 January 6, 2010 C H A P T E R 3 CAN Device Board Hardware Description The CAN device board uses a Stellaris LM3S2110 microcontroller to demonstrate a complete two-node network. The board can be used with the main LM3S2965 evaluation board or as a standalone board. Device Overview The Stellaris LM3S2110 ARM Cortex-M3-based microcontroller has 64-KB flash memory, 25-MHz operation, a CAN module, and a wide range of peripherals. For complete device details, see the LM3S2110 data sheet (order number DS-LM3S2110). The LM3S2110 microcontroller is factory programmed with a quickstart demonstration program that adds a remote volume control feature to the quickstart application. The quickstart program resides in the LM3S2110 on-chip flash memory and runs each time power is applied, unless the quickstart has been replaced with a user program. Power Supply The CAN device board receives +5.0-V power from the CAN bus and should not be connected to a CAN bus that ha a power wire voltage of greater than 10.0 V. If the bus is unpowered, a +5.0-V local power supply must be provided. The LM3S2110 is powered from a +3.3-V rail, supplied by a low drop-out (LDO) regulator. +3.3-V power is available for powering external circuits. Programming and Debugging A standard two-way header supports both JTAG And SWD programming and debugging using either the main LM3S2965 board in ICDI out mode or a full-featured debug interface. Interfacing Two push switches and an LED implement a very simple user interface. The board’s capabilities are easily expanded using the I/O breakout headers. For breakout header signal assignments see Figure B-4.‚ “LM3S2110 CAN Device Board Connections,” on page 30. January 6, 2010 19 CAN Device Board Hardware Description 20 January 6, 2010 A P P E N D I X A Schematics This section contains the schematics for the LM3S1968 Evaluation Board: LM3S2965 Micro and CAN Host on page 22 OLED Display, Switches, and Audio on page 23 USB, Debugger Interfaces, and Power on page 24 CAN Device Using LM3S2110 on page 25 JTAG Logic with Auto Mode Detect, Hibernate, and TVccControl on page 26 January 6, 2010 21 LM3S2965 Micro and CAN Host 1 2 3 4 5 6 I/O Breakout Headers 40 A 39 PB5/C1PD4/CCP3 PD6/FAULT Stellaris Microcontroller with CAN U1 INT_TCK TMS/SWDIO PC2/TDI PC3/TDO B PA0/U0RX PA1/U0TX PA2/SSI0CLK PA3/SSI0FSS PA4/SSI0RX PA5/SSI0TX PA6/I2CSCL PA7/I2CSDA 26 27 28 29 30 31 34 35 PC4/PhA0 PC5/C1+ PC6/C2+ PC7/C2- 80 79 78 77 25 24 23 22 PE0/SSI1CLK PE1/SSI1FSS PE2/SSI1RX PE3/SSI1TX 72 73 74 75 ADC0 ADC1 ADC2 ADC3 1 2 5 6 64 MCURSTn 48 49 OSC32IN OSC32OUT 1 C Y2 50 51 65 76 2 8.00MHz C31 C32 18PF 18PF 9 15 21 33 39 45 54 57 63 69 82 87 94 4 97 History Revision 0 Date Description May 7, 07 52 53 Prototype release A May 12, 07 First Production Release B Jun 29, 07 Improve SWD out feature C Sept 28, 07 Change to RiT 128x96 OLED display PA0/U0RX PA1/U0TX PA2/SSI0CLK PA3/SSI0FSS PA4/SSI0RX PA5/SSI0TX PA6/I2C1SCL PA7/I2C1SDA PB0/CCP0 PB1/CCP2 PB2/I2C0SCL PB3/I2C0SDA PB4/C0PB5/C1PB6/C0+ PB7/TRST PC0/TCK/SWCLK PC1/TMS/SWDIO PC2/TDI PC3/TDO/SWO PC4/PhA0 PC5/C1+ PC6/C2+ PC7/C2- PD0/CAN0RX PD1/CAN0TX PD2/U1RX PD3/U1TX PD4/CCP3 PD5/CCP4 PD6/FAULT PD7/IDX0 PE0/SSI1CLK PE1/SSI1FSS PE2/SSI1RX PE3/SSI1TX PF0/CAN1RX PF1/CAN1TX PF2/PWM4 PF3/PWM5 PF4 PF5 PF6 PF7 ADC0 ADC1 ADC2 ADC3 RST MOSCin MOSCout PG0/U2RX PG1/U2TX PG2/PWM0 PG3/PWM1 PG4 PG5/CCP5 PG6/PhA1 PG7/PHB1 PH0/PWM2 PH1/PWM3 PH2/IDX1 PH3/PhB0 OSC32in OSC32out AVDD AVDD WAKE HIB CMOD0 CMOD1 VDD33 VDD33 VDD33 GND GND GND GND GND GND GND GND GND GND GND GND GND AGND AGND VDD33 VDD33 VDD33 VDD33 VDD33 66 67 70 71 92 91 90 89 PB0/CCP0 PB1/CCP2 PB2/I2C0SCL PB3/I2CSDA PB4/C0PB5/C1PB6/C0+ 10 11 12 13 95 96 99 100 PD0/CAN0RX PD1/CAN0TX PD2/U1RX PD3/U1TX PD4/CCP3 PD5/CCP4 PD6/FAULT PD7/IDX0 47 61 60 59 58 46 43 42 PF0/CAN1RX PF1/CAN1TX PF2/PWM4 PF3/PWM5 PF4 PF5 PF6 PF7 19 18 17 16 41 40 37 36 86 85 84 83 PG0/U2RX PG1/U2TX PG2/PWM0 PG3/PWM1 PG4 PG5/CCP5 PG6/PHA1 PG7/PHB1 PH0/PWM2 PH1/PWM3 PH2/IDX1 PH3/PHB0 ADC1 ADC3 +3.3V PD2/U1RX PG3/PWM1 R25 10K PB7/TRST PG1/U2TX PC7/C2PC5/C1+ PG7/PHB1 PA1/U0Tx PA3/SSI0FSS PA5/SSI0TX PA7/I2CSDA 2 1 4 LDO TXD RXD JP15 8 CANH CANL GND 1 3 5 7 9 VCC VREF SN65HVD1050D 3 5 2 4 6 8 10 PE1/SSI1FSS PB3/I2CSDA PB1/CCP2 PF1/CAN1TX PF3/PWM5 OSC32OUT PF0/CAN1RX PF6 PG4 73 PG5/CCP5 A PB0/CCP0 PF2/PWM4 PF4 OSC32IN PF5 PF7 74 +3.3V CANH D1 +5V +BUSPWR MBR0520 Header 5X2 C2 0.1UF C1 4.7UF Pin-out enables straight-through connection to a CAN DB-9M. ERRATA: Rev 0 and Rev A boards have Pin 36 connected to +3.3V. Pin 36 should be connected to break-out pad #12. +3.3V JP1 C3 0.1UF VCP_RX JP2 PA1/U0Tx C VCP_TX JP6 44 56 68 81 93 PA2/SSI0CLK OLEDCLK JP4 PA3/SSI0FSS +3.3V OLEDCSn JP3 PC7/C2C9 0.1UF OLEDDC PA5/SSI0TX 55 On-board Peripheral Signals Jumpers can be removed to JP7 OLEDDIN free GPIO lines as required. JP12 PG4 7 SELECT_SWn JP13 PG2/PWM0 VDD25 VDD25 VDD25 VDD25 +5V PH0/PWM2 PH2/IDX1 PC2/TDI PE3/SSI1TX PE2/SSI1RX PE0/SSI1CLK PB2/I2C0SCL P1 GND CANL GND +5V RS 2 R1 120R 7 6 PA0/U0Rx 8 20 32 42 PB7/TRST PH1/PWM3 PH3/PHB0 PC3/TDO B C6 C7 C8 0.01UF 0.01UF 0.1UF VBAT 1 41 +15V CAN Port CAN Transceiver U2 3 98 +3.3V PB6/C0+ PB4/C0PD5/CCP4 PD7/IDX0 ADC0 ADC2 PD0/CAN0RX PD1/CAN0TX PD3/U1TX PG2/PWM0 PG0/U2RX PC6/C2+ PC4/PhA0 PA0/U0Rx PA2/SSI0CLK PA4/SSI0RX PA6/I2CSCL PG6/PHA1 14 38 62 88 C10 C11 0.01UF 0.1UF C12 4.7UF LED JP10 PF4 UP_SWn JP8 PF5 DOWN_SWn JP9 PF6 LM3S2965 D LEFT_SWn D JP11 PF7 RIGHT_SWn Drawing Title: Fury CAN Evaluation Board Page Title: LM3S2965 Micro and CAN Host JP5 PG3/PWM1 SOUND JP14 PC6/C2+ Size EN+15V Date: 1 2 3 4 5 B Document Number: 9/28/2007 1 Sheet 6 1 of 4 Rev C OLED Display, Switches, and Audio 1 2 3 4 5 6 U3 C13 4.7UF A +3.3V +5V +5V D3 L1 NR4018T100M 10uH R3 2.2 +15V U8 BZ1 5 D2 MBR0520 VIN SW C16 4.7UF FB NFT-03A 1 200K OLEDCSn MCURSTn OLEDDC MBR0520 R5 200K C19 120pF R2 OLEDCLK OLEDDIN C14 3 C17 4.7UF 0.1UF +3.3V Q1 NDS331N SOUND 4 EN+15V R8 10K R6 10K B SHDNn GND 2 R7 17.8K +15V FAN5331 C15 0.1UF 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 NC VCIR VCOMH LVSS VSS BS1 BS2 IREF CSn RESn D/Cn R/Wn E D0/SCLK D1/SDIN D2 D3 D4 D5 D6 D7 VDDIO VDD VCC NC C18 0.1UF A OLED-RIT-128X96 RGS13128096WH000 +15V 50mA Power Supply for OLED Display Speaker Circuit B 128x96 OLED Graphics Display +3.3V Reset R9 10K SW1 RESET_SWn SW-B3S1000 C34 R10 LED 330 OMIT LED1 Green Select User SW2 C SW-B3S1000 C SELECT_SWn Up R11 DBGOUTLED 330 SW3 SW-B3S1000 UP_SWn LED2 Green Debug Out LED3 Green Power Down SW4 SW-B3S1000 DOWN_SWn +3.3V R12 Left 330 SW5 SW-B3S1000 LEFT_SWn Right SW6 SW-B3S1000 D RIGHT_SWn D User Switches Status LEDs Drawing Title: Fury CAN Evaluation Board Page Title: OLED display, Switches and Audio Size Date: 1 2 3 4 5 B Document Number: 9/28/2007 2 Sheet 6 2 of 4 Rev C USB, Debugger Interfaces, and Power 1 2 3 4 5 6 Debug Interface Logic 8 R14 27 7 C23 USBDM USBDP 0.01UF ACBUS0 ACBUS1 ACBUS2 ACBUS3 SI/WUA R15 1.5K B +5V BDBUS0 BDBUS1 BDBUS2 BDBUS3 BDBUS4 BDBUS5 BDBUS6 BDBUS7 +5V R16 10K U6 8 7 6 5 VCC NC ORG GND CS SK DI DO 1 2 3 4 48 1 2 47 R17 1.5K CAT93C46 43 44 1K 64X16 4 5 +5V 1 Y1 C4 27PF EECS EESK EEDATA TEST BCBUS0 BCBUS1 BCBUS2 BCBUS3 SI/WUB XTIN XTOUT RESET# RSTOUT# PWREN# SRSTN DBG_JTAG_EN 15 13 12 11 10 RESET_SWn +3.3V 40 39 38 37 36 35 33 32 A0/GOE0 A1 A2 A3 A4 A5 Bank 0 A6 A7 A8 A9 A10 A11 A12 +3.3V TP3 PLD_TDO TP4 +3.3V C5 27PF 45 VCC VCC VCCIOA VCCIOB AGND AVCC 20 21 22 23 24 26 27 28 31 32 33 34 38 B0 B1 B2 B3 B4 B5 B6 B7 B8 B9 B10 B11 B12 PC2/TDI PC3/TDO TARGETCABLEn DBGOUTLED VCP_TX PB7/TRST MCURSTn B R26 4.7K +3.3V TMS/SWDIO TCK/SWCLK SWO_EN C33 0.1UF MODE is reserved for future use. 30 29 28 27 26 MODE VCP_TX_SWO +3.3V JTAG/SWD Interface Input/Output 41 R18 PC2/TDI 27 +5V GND GND GND GND A TP6 VCP_RX 2 9 18 25 34 PLD JTAG TEST POINTS TP5 U4 LC4032V-75TN48C VCC VCC Bank 1 PC2/TDI 6.00MHz C TP2 PLD_TDI 41 40 39 0.1UF R13 27 44 45 46 47 48 2 3 4 7 8 9 10 14 INT_TCK TCK TDI/DI TDO/DO TMS/OUTEN 24 23 22 21 20 19 17 16 30 29 ADBUS0 ADBUS1 ADBUS2 ADBUS3 ADBUS4 ADBUS5 ADBUS6 ADBUS7 3V3OUT A13 A14 A15 6 15 16 17 C22 60ohm @ 100 MHz GND GND R4 4.7K U5 5 4 3 FB1 2 1 USB+5V B15/GOE1 B14 B13 C21 0.1UF 11 25 1 35 +3.3V USB Device Controller TCK TMS TDI TDO 7 USBSH VCCO (Bank 1) GND (Bank 1) C20 0.1UF JP17 6 18 43 19 42 G CLK1/I CLK0/I CLK2/I CLK3/I ID GND (Bank 0) VCCO (Bank 0) D+ 5 6 D- 13 37 5V 12 36 +3.3V 54819-0519 P2 TP1 PLD_TMS +3.3V USB Interface A PLD_TCK 3 42 14 31 TMS/SWDIO R22 46 C28 330 P3 R19 +3.3v C24 C25 C26 C27 0.1UF 0.1UF 0.1UF 0.1UF TCK/SWCLK FT2232D TMS/SWDIO TCK/SWCLK R20 27 27 XTDI XTMS XTCK R21 XTDO 1 3 5 7 9 11 13 15 17 19 27 0.1UF Channel A : JTAG / SW Debug Channel B : Virtual Com Port PC3/TDO R23 PC3/TDO U7 +5V 1 6 C Header 10X2 27 R24 TARGETCABLEn USB +5V to +3.3V 500mA Power Supply USB+5V JP16 2 4 6 8 10 12 14 16 18 20 +3.3v 4.7K +3.3V VIN1 VOUT VIN2 SENSE C29 4.7UF NC 4 5 C30 4.7UF 3 D D 2 GND GND 7 LP8345ILD-3.3 Drawing Title: Fury CAN Evaluation Board Page Title: USB, Debugger Interfaces and Power Size Date: 1 2 3 4 5 B Document Number: 9/28/2007 3 Sheet 6 3 of 4 Rev C Schematic CAN Devicepage Using 1 LM3S2110 1 2 3 4 5 6 Up SW100 DPF0 D+3.3V D+5V A J100 34 J103 1 J106 35 J109 33 J112 60 J115 36 J121 2 17 18 19 20 21 22 23 24 DGND 53 52 16 15 14 13 NOTE: Some LM3S2110 pins are no-connects. These pins have been brought out to pads to allow other Stellaris CAN devices to be used instead of LM3S2110. 26 27 28 29 30 31 34 35 J101 J104 J107 J110 J113 J116 J119 J122 DTCK DTMS DTDI J124 DTDO J126 J128 J130 J132 J134 80 79 78 77 25 24 23 22 72 73 74 75 47 50 J136 49 J138 51 J140 J142 3 4 J145 5 J147 6 J149 J151 B D+3.3V 1 2 5 6 PA0/U0RX PA1/U0TX PA2/SSI0CLK PA3/SSI0FSS PA4/SSI0RX PA5/SSI0TX PA6/CCP1 nc PB0/CCP0 PB1/CCP2 PB2/I2C0SCL PB3/I2C0SDA PB4/C0PB5/C1PB6/C0+ PB7/TRST PC0/TCK/SWCLK PC1/TMS/SWDIO PC2/TDI PC3/TDO/SWO PC4 PC5/C1+ PC6/C2+ PC7/C2- PD0/CAN0RX PD1/CAN0TX PD2 PD3 PD4/CCP3 PD5 PD6/FAULT PD7/C0o PE0 PE1 nc nc PF0/PWM0 PF1/PWM1 PF2 nc nc nc nc nc nc nc nc nc PG0 PG1 nc nc nc nc nc nc PH0 PH1 nc nc R103 68K DRSTn 64 RST C100 0.1UF 48 49 DGND 1 Y100 2 C103 37 38 J163 42 J164 J118 C104 18PF 18PF 8.00MHz C DGND 52 53 50 51 65 76 DGND 9 15 21 33 39 45 54 57 63 69 82 87 94 4 97 JTAG/SWD Interface D+3.3V P101 DTDO Down R104 68K U100 D+3.3V +5VBUS DTDI DTMS DTCK 1 3 5 7 9 11 13 15 17 19 2 4 6 8 10 12 14 16 18 20 SW-B3S1000 CAN Microcontroller Power Rail Break-out MOSCin MOSCout OSC32in OSC32out AVDD AVDD WAKE HIB CMOD0 CMOD1 VDD33 VDD33 VDD33 VDD33 VDD33 VDD33 VDD33 VDD33 GND GND GND GND GND GND GND GND GND GND GND GND GND AGND AGND SW-B3S1000 66 67 70 71 92 91 90 89 43 J102 46 J105 45 J108 48 J111 61 J114 62 J117 59 J120 58 J123 10 11 12 13 95 96 99 100 47 61 60 59 58 46 43 42 19 18 17 16 41 40 37 36 86 85 84 83 3 98 8 20 32 44 56 68 81 93 SW101 DPF1 DRSTn SW-B3S1000 DGND LDO 330 DPF0 DPF1 DPF2 LED100 Green 7 J125 8 J127 64 J129 63 J131 66 J133 65 J135 31 J137 44 J139 41 J141 40 J143 39 J144 30 J146 29 J148 28 J150 12 J152 11 J153 10 J154 9 J155 27 J156 26 J157 25 J158 32 J165 57 J159 56 J160 55 J161 54 J162 DGND 330 LED101 Green B DGND CAN Transceiver CAN Port U101 1 4 JP101 8 2 DGND DGND TXD RXD CANH CANL P100 GND DCANL GND 1 3 5 7 9 D+5V RS GND R102 120R 7 6 VCC VREF 3 5 C101 0.1UF C102 0.1UF DCANH +5VBUS Header 5X2 Pin-out enables straight-through connection to a CAN DB-9M. DGND D+3.3V 2 4 6 8 10 DGND SN65HVD1050D +5V to +3.3V 500mA Power Supply +5VBUS JP100 U102 D+5V 1 DGND 6 D+3.3V C110 0.1UF C111 C112 0.01UF 0.1UF VOUT VIN2 SENSE NC 2 DGND 7 GND C D+3.3V VIN1 C105 4.7UF 55 14 38 62 88 Power R101 D+3.3V GND 4 5 C106 4.7UF 3 7 LP8345ILD-3.3 DGND VDD25 VDD25 VDD25 VDD25 Status R100 DPF2 C107 C108 C109 0.01UF 0.01UF 0.1UF VBAT A Reset SW102 DGND DGND DGND C113 4.7UF DGND DGND DGND Header 10X2 LM3S2110 D D CAN Device Evaluation Board Drawing Title: Fury CAN Evaluation Board Page Title: CAN Device using LM3S2110 Size Date: 1 2 3 4 5 B Document Number: 9/28/2007 4 Sheet 6 4 of 4 Rev C JTAG Logic with Auto Mode Detect, Hibernate, and TVccControl A B C 1 D I90 SWO_EN 10 FTDI_TCK 45 DBGOUT I105 44 I85 I86 ITCK I109 41 I7 2 H 1 B A S I91 G S A B 34 F FTDI_DBG I89 VCP_TX E XTCK 2 I87 FTDI_TDI_DO 46 I6 I92 32 U0TX 24 XTDO S 3 FTDI_TDO_DI I3 B A 47 I16 JTAGEN I18 FTDI_TMS 48 I111 I4 21 4 JTAGEN I20 FTDI_DBG 5 FTDIJTAGEN 4 FTDI_SRSTn 3 3 I35 S SWDEN I36 I5 I37 I2 XTDI 4 I112 B A I17 I9 40 XTMS 5 I8 D FTDI_DBG Q DBGOUT 31 I96 6 C 7 I95 I99 33 I102 RSTSW 9 RC 14 EXTCABLEn 26 HIBn 16 7 8 A DBGLED 6 INTDBG I100 I42 I15 38 I104 I70 I106 I107 TEST TRSTn MCURSTn 7 I74 I115 TVCC 15 Texas Instruments, Inc. I114 LM3S2965 Evaluation Kit JTAG Logic with Auto Mode Detect, Hibernate and TVcc Control Sept 28, 2007 I13 DRVEN I108 B C D E F G 8 H A P P E N D I X B Connection Details This appendix contains the following sections: Component Locations Evaluation Board Dimensions I/O Breakout Pads ARM Target Pinout References Component Locations Figure B-1. Component Locations January 6, 2010 27 Evaluation Board Dimensions Evaluation Board Dimensions Figure B-2. LM3S2965 Evaluation Board Dimensions Figure B-3. LM3S2110 CAN Device Board Dimensions 28 January 6, 2010 Stellaris® LM3S2965 Evaluation Board I/O Breakout Pads The LM3S2965 EVB has 57 I/O pads, 15 power pads, and 2 crystal connections, for a total of 74 pads. Connection can be made by soldering wires directly to these pads, or by using 0.1” pitch headers and sockets. Note: In Table B-2, an asterisk (*) by a signal name (also on the EVB PCB) indicates the signal is normally used for on-board functions. Normally, you should cut the associated jumper (JP1-15) before using an assigned signal for external interfacing. Table B-1. I/O Breakout Pads Pad No. Pad No. Pad No. Pad No. GND 40 39 +3.3 V +12 V 41 42 +5 V PB5/C1- 38 37 PB6/C0+ GND 43 44 GND PD4/CCP3 36 35 PB4/C0- PB7/TRST 45 56 PH0/PWM2 PD6/FAULT 34 33 PD5/CCP4 PH1/PWM3 47 48 PH2/IDX1 ADC1 30 29 ADC0 PC3/TDO 51 52 PE3/SSI1TX ADC3 28 27 ADC2 GND 53 54 PE2/SSI1RX GND 26 25 PD0/CAN0RX PE1/SSI1FSS 55 56 PE0/SSI1CLK PD2/U1RX 24 23 PD1/CAN0TX PB3/I2CSDA 57 58 PB2/I2C0SCL PG3/PWM1* 22 21 PD3/U1TX PB1/CCP2 59 60 GND GND 20 19 PG2/PWM0* PF1/CAN1TX 61 62 PB0/CCP0 PG1/U2TX 18 17 PG0/U2RX PF3/PWM5 63 64 PF2/PWM4 PC7/C2-* 16 15 PC6/C2+* OSC32OUT 65 66 PF4* PC5/C1+ 14 13 PC4/PHA0 PF0/CAN1RX 67 68 OSC32IN GND 12 11 PA0/U0RX* PF6* 69 70 PF5* PA1/U0TX* 10 9 PA2/SSI0CLK* PG4* 71 72 PF7* PA3/SSI0FSS* 8 7 PA4/SSI0RX PG5/CCP5 73 74 GND PA5/SSI0TX* 6 5 PA6/I2CSCL PA7/I2C1SDA 4 3 PG6/PHA1 GND 2 1 +3.3 V Description January 6, 2010 Description Description Description 29 Recommended Connectors Recommended Connectors Connection can be made by soldering wires directly to pads or using 0.1” pitch headers and sockets. Table B-2. Recommended Connectors Pins 1-40 (2 x 20 way) Pins 41-74 (2 x 17 way) PCB Socket Sullins PPPC202LFBN-RC Digikey S7123-ND Cable Socket 3M 89140-0101 Digikey MKC40A-ND Pin Header Sullins PEC20DAAN Digikey S2012E-20-ND PCB Socket Sullins PPPC172LFBN-RC Digikey S7120-ND Cable Socket 3M 89134-0101 Digikey MKC34A-ND Pin Header Sullins PEC17DAAN Digikey S2012-17-ND Figure B-4. LM3S2110 CAN Device Board Connections 30 January 6, 2010 Stellaris® LM3S2965 Evaluation Board ARM Target Pinout In ICDI input and output mode, the Stellaris LM3S2965 Evaluation Kit supports ARM’s standard 20-pin JTAG/SWD configuration. The same pin configuration can be used for debugging over serial-wire debug (SWD) and JTAG interfaces. The debugger software, running on the PC, determines which interface protocol is used. The Stellaris target board should have a 2x10 0.1” pin header with signals as indicated in Table B-3. This applies to both external Stellaris MCU targets (Debug output mode) and to external JTAG/SWD debuggers (Debug input mode). Table B-3. 20-Pin JTAG/SWD Configuration Function Pin Pin Function VCC (optional) 1 2 nc nc 3 4 GND TDI 5 6 GND TMS 7 8 GND TCK 9 10 GND nc 11 12 GND TDO 13 14 GND nc 15 16 GND nc 17 18 GND nc 19 20 GND ICDI does not control RST (device reset) or TRST (test reset) signals. Both reset functions are implemented as commands over JTAG/SWD, so these signals are not necessary. It is recommended that connections be made to all GND pins; however, both targets and external debug interfaces must connect pin 18 and at least one other GND pin to GND. References In addition to this document, the following references are included on the Stellaris Family Development Kit documentation CD-ROM and are also available for download at www.ti.com/ stellaris: Stellaris LM3S2965 Evaluation Kit Quickstart Guide for appropriate tool kit (see “Evaluation Kit Contents,” on page 10) Stellaris LM3S2965 Read Me First for the CAN Evaluation Kit StellarisWare® Driver Library, Order number SW-DRL StellarisWare® Driver Library User’s Manual, publication number SW-DRL-UG Stellaris LM3S2965 Data Sheet, publication DS-LM3S2965 January 6, 2010 31 References Additional references include: Future Technology Devices Incorporated FT2232C Datasheet Information on development tool being used: – RealView MDK web site, www.keil.com/arm/rvmdkkit.asp – IAR Embedded Workbench web site, www.iar.com – Code Sourcery GCC development tools web site, www.codesourcery.com/gnu_toolchains/arm – Code Red Technologies development tools web site, www.code-red-tech.com – Texas Instruments’ Code Composer Studio™ IDE web site, www.ti.com/ccs 32 January 6, 2010 IMPORTANT NOTICE Texas Instruments Incorporated and its subsidiaries (TI) reserve the right to make corrections, modifications, enhancements, improvements, and other changes to its products and services at any time and to discontinue any product or service without notice. Customers should obtain the latest relevant information before placing orders and should verify that such information is current and complete. All products are sold subject to TI’s terms and conditions of sale supplied at the time of order acknowledgment. TI warrants performance of its hardware products to the specifications applicable at the time of sale in accordance with TI’s standard warranty. Testing and other quality control techniques are used to the extent TI deems necessary to support this warranty. Except where mandated by government requirements, testing of all parameters of each product is not necessarily performed. TI assumes no liability for applications assistance or customer product design. Customers are responsible for their products and applications using TI components. To minimize the risks associated with customer products and applications, customers should provide adequate design and operating safeguards. TI does not warrant or represent that any license, either express or implied, is granted under any TI patent right, copyright, mask work right, or other TI intellectual property right relating to any combination, machine, or process in which TI products or services are used. Information published by TI regarding third-party products or services does not constitute a license from TI to use such products or services or a warranty or endorsement thereof. Use of such information may require a license from a third party under the patents or other intellectual property of the third party, or a license from TI under the patents or other intellectual property of TI. Reproduction of TI information in TI data books or data sheets is permissible only if reproduction is without alteration and is accompanied by all associated warranties, conditions, limitations, and notices. Reproduction of this information with alteration is an unfair and deceptive business practice. TI is not responsible or liable for such altered documentation. Information of third parties may be subject to additional restrictions. Resale of TI products or services with statements different from or beyond the parameters stated by TI for that product or service voids all express and any implied warranties for the associated TI product or service and is an unfair and deceptive business practice. TI is not responsible or liable for any such statements. TI products are not authorized for use in safety-critical applications (such as life support) where a failure of the TI product would reasonably be expected to cause severe personal injury or death, unless officers of the parties have executed an agreement specifically governing such use. Buyers represent that they have all necessary expertise in the safety and regulatory ramifications of their applications, and acknowledge and agree that they are solely responsible for all legal, regulatory and safety-related requirements concerning their products and any use of TI products in such safety-critical applications, notwithstanding any applications-related information or support that may be provided by TI. Further, Buyers must fully indemnify TI and its representatives against any damages arising out of the use of TI products in such safety-critical applications. TI products are neither designed nor intended for use in military/aerospace applications or environments unless the TI products are specifically designated by TI as military-grade or "enhanced plastic." Only products designated by TI as military-grade meet military specifications. Buyers acknowledge and agree that any such use of TI products which TI has not designated as military-grade is solely at the Buyer's risk, and that they are solely responsible for compliance with all legal and regulatory requirements in connection with such use. TI products are neither designed nor intended for use in automotive applications or environments unless the specific TI products are designated by TI as compliant with ISO/TS 16949 requirements. Buyers acknowledge and agree that, if they use any non-designated products in automotive applications, TI will not be responsible for any failure to meet such requirements. Following are URLs where you can obtain information on other Texas Instruments products and application solutions: Products Applications Amplifiers amplifier.ti.com Audio www.ti.com/audio Data Converters dataconverter.ti.com Automotive www.ti.com/automotive DLP® Products www.dlp.com Communications and Telecom www.ti.com/communications DSP dsp.ti.com Computers and Peripherals www.ti.com/computers Clocks and Timers www.ti.com/clocks Consumer Electronics www.ti.com/consumer-apps Interface interface.ti.com Energy www.ti.com/energy Logic logic.ti.com Industrial www.ti.com/industrial Power Mgmt power.ti.com Medical www.ti.com/medical Microcontrollers microcontroller.ti.com Security www.ti.com/security RFID www.ti-rfid.com Space, Avionics & Defense www.ti.com/space-avionics-defense RF/IF and ZigBee® Solutions www.ti.com/lprf Video and Imaging www.ti.com/video Wireless www.ti.com/wireless-apps Mailing Address: Texas Instruments, Post Office Box 655303, Dallas, Texas 75265 Copyright © 2010, Texas Instruments Incorporated