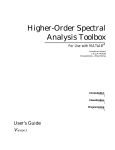
1
C E G 5 G1 3 7 A 2 G5 G2 S37 1 Y G3 S13 X 6 G6 4 B G4 H D F Figura 1. Macchina di equlibratura: schema cinematico, posizione dei baricentri dei membri e dei trasduttori. praticati degli incavi semi-circolari per permettere la plasticizzazione locale del materiale a seguito della flessione della lamiera stessa. L’utilizzo dei giunti complianti può quindi essere assimilato al comportamento di una coppia rotoidale ideale alla quale venga applicata una coppia esterna che in prima approssimazione può considerarsi dipendente in modo lineare dalla rotazione relativa delle estremità dei giunti stessi e dalla derivata temporale della rotazione stessa. Ne consegue: ( M Icmp = k I Δθ mn + bΔθmn ) (1) dove si è indicato con I l’i-esima coppia rotoidale alla quale è applicata la coppia M e con șjk la rotazione relativa delle estremità del giunto I congiungente i membri m e n. I coefficienti di proporzionalità elastica k e viscoelastica b sono stati determinati per ogni giunto realizzando un modello agli elementi finiti [5] che possa fornire gli spostamenti relativi delle estremità dei giunti per una assegnata coppia esterna dalla quale calcolare i valori cercati. Modellazione dei sensori I sensori di spostamento presenti nel sistema sono due: il sensore S13 che misura gli spostamenti relativi tra il membro 1 ed il membro 3, ed il sensore S37 tra i membri 3 e 7. Sotto l’aspetto cinematico i sensori non aggiungono e non tolgono gradi di libertà al sistema (sotto l’ipotesi di piccoli spostamenti) e possono essere modellati come se fossero costituiti da una diade. La diade appartiene alla famiglia dei Gruppi di Assur, particolari meccanismi aventi la proprietà di non variare i gradi di libertà dei meccanismi ai quali vengono aggiunti. La diade è costituita da due membri vincolati tra loro da una coppia prismatica e 55