1
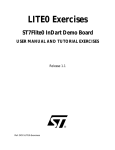
5 - Peripherals The COCO bit is reset when the ADCCSR register is written. A D O N - C O C O 0 C H 2 - C H 1 C H 0 A D C C o n tr o l / S ta tu s r e g is te r ( A D C C S R ) fC P U C O C O A D C : C o n v e r s io n C o m p le te A D O N : A /D c o n v e rte r O n C H 2 - C H 0 : C h a n n e l s e le c tio n A IN 0 A n a lo g m u x S a m p le a n d h o ld A D C D a ta r e g is te r ( A D C D R ) A IN n A D 7 A D 6 A D 5 A D 4 A D 3 A D 2 A D 1 A D 0 A D C b lo c k d ia g r a m 05-adc0 5.6.3 The problem of the converter’s accuracy Linearity and accuracy are different ways of expressing the same reality: the successive voltage steps that correspond to each of the binary values are not absolutely equally spaced (otherwise the converter would be perfect), leading to a conversion error. Depending on the type of work the converter is employed for, one way or the other is better for expressing the suitability of the converter. If the converter is to be used as a measuring input, like measuring a temperature, a voltage, the level in a tank, to send it for information purposes, accuracy is the best expression. It indicates how much confidence one can have in the data. If the converter is to be used as the feedback input for a servo loop of the second order, for example a positioning device using a DC motor and a feedback potentiometer, then linearity is the key factor. Not only must a servo loop be accurate (since this accuracy translates into an error expressed in mm in the positioning system) but also it must be stable. So, the parameters of the whole system must meet certain conditions summarized in the so-called Nyquist 119/315