1
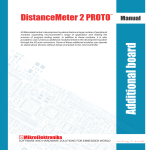
PWMB Current Sense D3 A0 Bridged Timer2 PWM2B Both halves of the bridge report current on A0 H-Bridge mode is the most common configuration for driving DC motors. It allows each MegaMoto to drive one DC motor in forward and reverse with variable speed. Each Arduino base unit can support up to three stacked MegaMotos and hence three independently controlled motors. Dual Half-bridge Mode Example Figure 5. MegaMoto half-bridge mode Function Enable 5V Jumper PWMA PWMB Current Sense D6 D10 none Notes Both power chips are always enabled and cannot be disabled via program control when the jumper is in this position. Timer0 PWM0A Timer1 PWM1B Current monitoring is not used so all analog pins are available for other applications. Half-bridge mode is used for uni-directional loads such as fan motors, pumps, lights, solenoids and other loads that don’t need to reverse direction. A single MegaMoto may control two motors independently in this mode. Also, a brushless motor may be controlled using two MegaMotos to provide three half-bridge circuits. Three MegaMoto units can supply six halfbridges so two brushless motors may be controlled by a full stack of three MegaMotos on a single Arduino base. Ganged Half-bridge Mode Example Version 1.5 - December 11, 2010 6