1
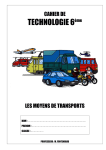
INRIA Rhônes-Alpes Montbonnot Second Year Internship from July 13th to August 19th Internship tutor : Sandrine Avakian, Fabien Jammes Wireless Sensor Network Dorian Haglund <[email protected]> Montbonnot, August 19, 2011 Contents 1 Context - INRIA 3 2 Internship goals 2.1 Toolchain . . . . . . . . . . 2.2 Sensors Drivers . . . . . . . 2.3 Logging data on a SD card 2.4 Radio device . . . . . . . . 2.5 TDMA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 5 5 6 6 6 3 Work actually done 3.1 Toolchain . . . . . . . . . . 3.2 Sensors Drivers . . . . . . . 3.3 Logging data on a SD card 3.4 Radio device . . . . . . . . 3.5 TDMA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7 7 8 8 10 10 4 Results 4.1 Sensors drivers . . . 4.2 File System Drivers . 4.3 Running FreeRTOS . 4.4 Radio device . . . . 4.5 TDMA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10 10 11 11 11 12 . . . . . . . . . . . . . . . . . . . . 5 Conclusion 12 6 References 12 7 Appendix 12 2 Introduction This report details the internship I made during summer 2011 in INRIA Rhônes-Alpes. During the internship I worked on a sensor network platform which can have various applications in sport, healthcare or robotic fields. For example, if the sensors measure precisely a skier’s trajectory, it can be recreated numerically and help the skier to improve his performance. Another example is, if someone has a non functional leg, the sensors can measure the movements and the forces impulsed by the sane leg, and recreate it on the deficient leg to simulate a walk. This platform is called Senslab. Its purpose is to provide a large scale open wireless sensor network to researchers to enable them to test their protocols for such networks. Furthermore, the platform offers a set of tools to help in the design, development, tuning, and experimentation of real large-scale sensor network applications. This network is made up of 1024 nodes distributed over 4 INRIA sites and remotely programmable for scientific research experimentation. Figure 1: Senslab Network a a http://senslab.inrialpes.fr/wp-content/uploads/2010/07/carte.png So far SWN430 board were used, but to overcome limitations due to hardware capacities, the INRIA decided to use a more powerful board based on the STM32 micro-controller. To use this board in the network the software must be adapted for the new device. This is the part I worked on. We will first present the institute, then we will explain my goals. We will explain the work actually done afterward. Finally, we will discuss the results obtained and conclude. 1 Context - INRIA I did my internship at INRIA Rhône-Alpes, located in Montbonnot, Isere France. It is a state institute of research in computer science and automatic. It’s composed of various research teams and, among other services, a software development support service where I worked named SED. Its purpose is to support the other teams by providing help for development tools, to create experimental platforms and to participate in the research teams’ software development. My supervisors was Sandrine Avakian, who is a generalist engineer in electronic, 3 telecommunication and computer science and Fabien Jammes who is also a generalist engineer specialized in image synthesis. Some of the SED’s members who had worked on the Senslab project left the INRIA to create their own company named HiKoB but continued the work they previously did in SED. They wrote most of the drivers I worked on. 2 Internship goals My main goal was to implement the same features as the WSN430 on the new board. Given that their hardware specifications were different, I had to understand hardware behavior and then upgrade the C software efficiently. Figure 2 is a picture of the new card. Figure 2: La carte STEVAL-MKI062V2 a a http://www.st.com/internet/evalboard/product/250367.jsp As you can see in this capture, the board has several devices such as : • a pression sensor (LPS001DL) • a temperature sensor (STML75DS2F) • an accelerometer and a magnetometer (LSM303DLH) • a gyroscope (LY330ALH) • a SD slot From capturing the data with different, to configure and use the operating system on this micro-controller, a whole set of different features had to be implemented. So the users could use this more effecient board for their projects. An example of a project which could use the sensor network is represented in Figure 3 4 Figure 3: Overall project structure As shown, the data are captured by the sensors then transformed to be able to reconstitute the trajectory. My work was focus on the left part of the scheme, the capture part. To achieve this target, several things had to be done. First of all, I had so set up my working environment to be able to program on the STM32 board. I helped replacing the former board (WSN430) with the new, from the software point of view. The embedded processor is a STM32 of the Cortex-M3 family using the ARM architecture. This board is in fact a benchmark for this new processor. I firstly had to set up the toolchains to programming on the board, then I worked on two sensors drivers. After this I tried to log the data to a SD card. Finally I try to use a radio chip with the card. 2.1 Toolchain Firstly I had to install the tools that would allow me to compile and run programs on the new card. Since the sensors’ processor are not the same as usual personal computers processors, the program need to be translated for the specific board. So the whole compilation chain must be redefined, this is called “cross compilation”. Once the program is compiled, it needs to be written (flashed) on the card. The service provided an interface for flashing the card through a JLink. When the program is running on the new card, it has to be debugged. A way to do this is to use an on-chip debugger, which allow to run instructions step by step. I worked on a different Operating System (OS) than the other members of the team who worked on this project. The software was already known, but I had to figure out which version to install, how to use them and how to make it work together on a Fedora. The toolchain was : • gcc-4.4.4 : Gnu C Compiler. This compiler support cross compilation for various processor family such as ARM. • newlib-0.19 : libraries for embedded system. • binutils-2.20.1 : Binary utilities providing linker and assembler. • OpenOCD : Open On Chip Debugger. These programs were already installed and tested on other machines, so I had to see if they could work on a Fedora Linux system. 5 2.2 Sensors Drivers At first, I had to test and debug the drivers created for the new card. Functional drivers implemented by ST Microelectronics for the card already existed, but the code that we had was not clear enough and and not easy to maintain, plus the drivers were not efficient enough to match the various applications requirements. This is why the development team decided to write new ones which were smaller in term of code size which reduced the memory used. To communicate with its surrounding peripherals such as the sensors or the micro-SD slot, the card’s processor needed drivers which could run the various communication protocols. The various components of the card are not connected all through the same buses so there are a driver for each bus. The pressure sensor and accelerometer I worked on used the I 2 C bus. I 2 C for Inter Integrated Circuit, is a bus to connect the sensor to the processor. I had to check the communication process between the core and the sensors through this bus. The protocol contains many synchronization phases, which were implemented by busy-waiting algorithms. Another way to solve this issue would be to wake up the process on an interruption because the I 2 C bus is rather slow and busywaiting is a waste of processor resources. But the team was not experimented with this I 2 C bus so we decided to take a simple approach first. 2.3 Logging data on a SD card Once the drivers for the magnetometer and the pressure sensor were completed, I had to log the data on a micro-SD card. To do so, I debugged and tested the file system (FAT32) drivers and the file system interface. A file system is a way to organize data on hard drives like SD cards or hard disk drive. The interface is used to make the file system transparent to users. This is useful because when the file system change, most of the programs can remain the same. Then a real time operating system (FreeRTOS) needed to be installed on the new card, which would manage the tasks that capture the data and transfer them either to a SD card or, later, to other boards. Another approach is to run the tasks alone on the card (without any OS) independently using timer synchronization. But for only two tasks, this solution complexity is very high. Indeed, assuming that the timers are correctly synchronized, there is no way to predict the ISR (Interrupt Service Routine, launched by the timer) duration. If a timer finishes before the previous ISR ends, that would imply data loss. Not to mention that if more task end up be added, the problem would become even more complex. That is why the service decided to use an OS, which imply more memory usage, but improve the code clarity and the stability of the running program. FreeRTOS was chosen as embedded real time OS because it is a very light and free OS for embedded system and real-time oriented. Moreover it was previously used by other employees, which means that the code review would be much easier. Other systems were tested such as Contiki and TinyOS, but for this application FreeRTOS was better. As a matter of fact, TinyOS is written in NesC (Network Embedded System C) and is not made for real-time applications and Contiky has a too heavy kernel because of his various functionality. 6 Figure 4: TDMA divide each frequency channel into multiple time slots a http://people.seas.harvard.edu/˜jones/cscie129/nu 2.4 a lectures/lecture3%20/TDMA01.html Radio device The card I worked on doesn’t have an integrated radio device. Since the goal is to set up a wireless sensor network, an external radio module was plugged on the board. Once again drivers were needed in order to communicate with the radio. Drivers were already written for an other board than the STEVAL-MKI062V2, so I could follow the example of this code and adapt it. The first step was to make the micro-controller communicate with the radio module. Then I had to make basic transmission and reception work, to see if the radio could send data over the network. To test the reception, I was given an antenna that emitted packed on the required frequency. 2.5 TDMA TDMA (Time Division Multiple Access) was chosen as the communication protocol at the mac layer. It is a simple protocol based upon time slots allocation to the network nodes. TDMA was chosen over CSMA because its timings are more accurate, there is less data loss and is lighter on the battery state (nothing to do between two time slots). In this architecture there are two types of nodes, the sensor nodes which use the sensors to record data and send it to the coordinator node which discover the new capturing nodes, attribute the time slots and fetch the data. Figure 5 shows the machine state of a sensor node. 7 Figure 5: The node Finite State Machine aA a beacon is message sent by the coordinator to all the nodes to provide its parameters The coordinator nodes reserved a specific time slot for new node discovery. Figure 6 shows the procedure when a new sensor node appears. Figure 6: Coordinator node discovering a new node 8 I had to write the communication protocol for the capturing and the coordinator. Once again, code was provided for other boards, and so was the state machine. 3 Work actually done 3.1 Toolchain Since I had to work on a board using an ARM processor and with no display screen, I started by installing the right compiler in order to be able to flash the board. Then I had to set up a proxy between the card and my personal computer in order to use debug utilities such as gdb and display execution traces. A real time operating system was also needed to run the programs. Since the development chain had never been installed on a Fedora system, I wrote a quick tutorial so the team will be able to set it up quickly. The toolchains contains : • GCC is the compiler itself, it calls the binutils tools and the newlib library. It I learned that on embedded device, you have to map the code, the data, the ram to specific part of the micro-controller device memory. And so how to write a linking script which tells gcc how to do so. FreeRTOS is embedded Operating System, which will be described below. The various compilation-related software described above and the rather complex installation procedures to set them up helped me to know the compilation chain better. Furthermore, it get me to know project compilation tools such as cmake which can generate makefiles (files containing the compilation parameters) from simple text configuration files, and manage new project source file in a simple way. 3.2 Sensors Drivers On the first weeks, I worked mostly on I 2 C bus. Firstly I had to become familiar with the embedded technologies, which I had never studied before. I had to understand the the code given, and check every step. The main part of the work was to check if registers were set to correct values and if the bus commands were sent in the right order. To do this I used GDB which allow to print the value stored at a given address - to examine registers - and see where are the infinite waiting loop. Such loops appear if the protocol is not respected. The protocols were documented in reference documentation of the board, provided by ST Microelectronics. 3.3 Logging data on a SD card SD Drivers When the sensors drivers were functional, the team wanted to be able to to write the data on a SD card. Drivers for the sd card and for the FAT32 file system were already written by HiKoB, but not fully tested yet. I had to test and debug the drivers using a benchmark. The benchmark consisted in writing 9 raw data into various hard-coded locations on the card, and read it afterward to see if the result was consistent. As a consequence, I had to learn about the Fat32 file organization, in sectors and clusters, and how to edit he FAT (File Allocation Table). FreeRTOS We used FreeRTOS as the real time operating system to manage the logging tasks. I had to get familiar with this OS and configure it to match the application requirements. FreeRTOS configuration consists in editing one file which set the OS main behaviors such as memory management, size of allocated memory, process and threads policy, etc. FreeRTOS allowed us to : • Choose the memory management. Since the tasks don’t need dynamical memory allocation or deletion, the simplest memory manager (and less ram-consuming) available was the best choice. In this system all the object are allocated statically and never freed. • Set the right stack/heap size. When my code was finished, I had to reduce the stack given to each task, to optimize memory usage. To do so, I gradually reduced the allocated memory until the program crash and the moved back to last good value with a 10% margin for obvious safety reason. Another approach is to to examine stacks’ task using GDB and see the deepest address used in the stack. But this approach was complicated and the code was likely to change, so a too precise analysis was pointless. • Get the tasks to work together. Tasks can run at different priorities, assuming that the highest priority task preempt on (take the processor from) the lower priority tasks, I had to deal with starving issue. The tasks run simultaneously, so I had to deal with all the usual concurrency programming issues, such as race condition, resource starvation, deadlocks, etc • Test the whole program. Since the several components were already tested individually, I let the operating system run for hours (a night and half a day) in order to see if any race condition, stack overflow, or other run-time related errors occurred. To write on the sd card, a classis producer-consumer pattern was used : The data log is made of two steps : • First, write captured data in a buffer. To do so, a free buffer (not dirty) is needed. A buffer is dirty when it contains data and has not been written on the card yet. When a free buffer is chosen, we must access it with the guarantee that no other tasks are using it. That is why we need a mutex for this buffer. A mutex is a structure that guarantee the access to a resource by a only one process at a a time. Once the data are stored on the hard drive, the buffer is usable and can be chosen by the sensors. • Second, write a buffer to the SD card. A buffer must be chosen, but among the dirty buffers some are more filled than others. The more used buffer is chosen, and once the access is granted by a mutex, access to the buffer (and lock it), and write it down on the card. 10 Figure 7: Buffers were accessed by two process in a concurrent manner Actually, the algorithm is more complicated. In fact, there are two mutexes for each buffer. One to access the buffer header, which describes the buffer’s state, and one to access to the data itself. This permits to check the buffer state when the data is locked. This allow to speed up the choosing function, but increase the complexity. Once again, the tasks were already written by the SED team but not functional. That is why I needed to first understand the concurrent access to buffers, and then correct it. This was the more complicated but the more interesting part of my internship. The SD standards don’t guarantee a stable response time when writing to the sd, but they do guarantee a maximal response time. This maximal response time is far too big for the log task to fit in between two captures. To overcome this issue of irregular writing time, it has been decided to use 15 buffers to prevent data loss. 15 buffers was the best compromise between memory allocation, and safe writing. If more buffer are used, every task’s stack must be increased, and with less buffer, the data loss risk is too high. 3.4 Radio device The first step was to make the micro-controller communicate with the radio module. To do so, I configured the micro-controller and tried to read registers into the device, which had predefined values. The radio device was connected to the board via an SPI bus. A Serial Peripheral Bus is used to connect a slave (in our case, the radio) to a master module (the micro-controller). It had to configure ten lines. Using the board data sheet I had to map the correct line to the micro-controller such as MISO (Master Input Slave Output), MOSI and the interrupt and timer. I also had to set the clock for the device. On the board, the main clock goes by various electronic circuit which slow down the clock such as prescaler – which purpose is to divide the clock to simulate a lower frequency – or speed it up (like the Phase locked loop). I retraced all the way the clock went by to finally set the device clock accordingly. While setting up the ISR (Interrupt Service Routine). I discovered something wrong in the linkage script. This script is in charge, among other thing, of setting the memory outline, and it did not map the NVIC (Nested Vector Interrupt Controller : which contained the adress of the ISRs) well. I hence learned the 11 script syntax and was able to understand the sections repartition according to the option given to gcc such as -ffunction-sections or -fdata-sections. These options allowed to improve the performance of the linkage, but were finally removed because they caused problems in debug phase. 3.5 TDMA I did not have enough time to port the TDMA protocols entirely on the new card. But I wrote the sensor node part, without being able to test it correctly because the coordinator part was not written and I had only one card. But I could deduce, from the other card drivers – which were written under more hardware constraints – the finite states machine. 4 4.1 Results Sensors drivers Thanks to the uart bus plugged in my machine’s usb port, I was able to print the value captured by the sensors live. This can be done by connecting a terminal to the USB port such as minicom or gtkterm. So I was able to see if the numbers were varying accordingly to what was expected. For example, as I was rotating the board in order to put an axis toward the ground, I could see the acceleration (provided by gravity) jump from one axis to the other. I could test the magnetometer by pulling up electronic device such as mobile phone. In a similar way, as the temperature sensor is very precise, I could see the values going up or down as the room was cooling down or warming up. Once the transformation part of the project is done, we will be able to reproduce the board’s movement because there will be full inertial module running (accelerometer and gyroscope) and represent the temperature variations. 4.2 File System Drivers In order to check the drivers for the FAT32 file system, there was two things to look at. First : if given a certain address on the hard drive we could effectively write on it. To do so, we first launched the program, and then plugged the card into a standard computer and ran the Linux dd program which can dump what it read on a device. By piping the output of dd to an hexadecimal interpreter ( hexdump), we could see if the data was actually there. After this, I had to test the file system interface, so I created, filled, and closed a file on a program on the board. Then I mounted the card on a computer, to see if the file was recognize by the FAT32 driver of the Linux kernel. Then I unmounted the device, and dumped it to see if the address in the file allocation table (FAT) matched the effective data address. 4.3 Running FreeRTOS To test the tasks running on FreeRTOS, I let the logging program run for a night and half a day, to see if any deadlocks or starvation, occurred. Then I checked the data on the sd card to see if they were consistent. Even is this test does not provide any formal guarantee that all cases were covered, it was judged 12 good enough to valid the software. As a matter of fact, if any formal proof were possible, it would be very complex and time consuming. I also set several stack size, and switch the priorities, to check the code stability. As it is, the tasks priorities favors the capture to the data recording. I tried to make my code stable the other way around, which means to pay the cost of an additional mutex. 4.4 Radio device To check if the radio pins were correctly configured, I read some internal register of the radio chip which value were set by hardware. This allow me to check, in one test, that the VCC (power supply bus), the MISO (Master Input Slave Output), the MOSI (Master Output Slave Input), and the clock pin were correctly set. The next two pins to test was the IRQ (interrupt pin) and the timer pin was correctly set. To do so I simulated a transmission, which would launch an interruption, and then a reception to see if the packet are correctly timestamped, and thus proving that the timer is working correctly. 4.5 TDMA I was not able to run any test on node part of the TDMA protocol since my code was not finished. 5 Conclusion This internship contributed greatly to my formation by giving me knowledge about embedded system and hardware architecture, compilation chain and various debugging tools. He also allowed me to discover how to work on large scale project, knowing that my code will be reviewed, and so made me understand the value of a good documentation. He reassured me on my formation because I met a lot of problems studied in class. 6 References Site of the tools used : • INRIA : http://www.inria.fr/ • SED Rhônes-Alpes : http://sed.inrialpes.fr/ • Senslab : http://www.senslab.info/ • Board : http://www.st.com/internet/evalboard/product/250367.jsp • Real Time Operating System : http://www.freertos.org/ • Proxy debugger http://openocd.berlios.de/web/ • Compiler http://gcc.gnu.org/ 13 7 Appendix STEVAL-MKI062V2 data sheet : 5 4 3.3V Power Management Vin R70 Vin 3 2 2 RS (533-1804) AVX (TAJR225K006RNJ) Dimension2012-12 metric equal to 0805 Grd 3.3V D2 D3 +3V3 +3V3 4DM R25 R26 4.7k 4.7k USBUF02W6 100 R29 I2C1_SCL I2C1_SDA C21 4.7nF GPIO2_PB0 26 ST_LPR 27 Gyro_PR_RST 57 58 100 R30 +3V3 R72 56R D4 36 PD/Sleep_LYaw 35 ST_LYaw 34 INT2_ACC 33 INT1_ACC R31 100 30 29 R32 100 R27 R28 4.7k 4.7k I2C2_SDA I2C2_SCL TP LY330ALH DAT2_Ex DAT3_In DAT3_Ex CMD_In CMD_Ex CLK_In CLK_Ex DAT0_In DAT1_In Micro QFN DAT0_Ex DAT1_Ex 5 23 7 22 6 17 21 RES RES RES VDD VDD_DIG_M 27 INT2_ACC RES RES 28 3 RES GND RES 26 INT1_ACC Y1 T2 R74 10K 32.768 kHz 4 3 1 2 OSC32_OUT OSC32_IN LYaw_Vref NC NC NC NC NC Y 4xOUTY NC 13 NC 12 R88 Mount 0R LGA 28L 4xINY NC NC GND 4xINX NC 21 10 11 16 R87 15 0R R89 0R Not Mount LPR_Vref 3 9 VDD ST_LYaw VREF OSCIN R76 Not Mount 1M LYaw_Vref JTAG/SWD 10nF R33 10k 8MHz 11 SDCard_CLK 232 UART2_RX 1 UART2_RTS 3 5 2 4 6 EMIF06-MSD02N16 RS232 UART2_TX UART2_CTS +3V3 Male Connector 2x3 Pitch 2.54 mm 2 1 J1 Digikey (WM18900-ND) Molex 22-05-7025 S4 2 1 3 SWITCH 1X2 D2 EAO 09.03201.02 RS: 115-6283 SMTY5.0A Farnell: 1608080 Distrelec: 210007 Temperature Sensor For further details please refer to datasheet +3V3 USB_5V VCC_EXT J4 10 SDCard_D0 SDCard_D1 Vin VCC_EXT R6 10k R35 10k Male Connector 2x5 Pitch 1.27 mm SAMTEC FTSH-105-01-F-D-K R36 10k JNTRST JTMS JTCK JTDO JTDI RESET# 2 JP1 JUMPER 1 R44 10k I2C2_SCL 2 nOS/INT 3 4 SDA VDD SCL A0 nOS/INT A1 GND A2 8 7 A0 6 A1 5 A2 C1 100nF C40 1 3 5 7 9 10uF 6.3V C41 100nF U9 SWD/JTAG GND +3V3 J8 +3V3 1 I2C2_SCL 2 I2C2_SDA 4 5 GPIO2_PB0 SPI1_SCK SPI1_MISO GPIO1_PA8_MCO 1 3 5 7 9 +3V3 CS SCL SDA/MOSI SA0/MISO 2 4 6 8 10 LPS001DL I2C Address: Read: 0xBB Write: 0xBA SPI1_CS SPI1_MOSI GPIO4_PC7 GPIO3_PC3 INT1 INT2 RES GND 6INT1_PS 7 8 9 LGA 16 A COMM. 2x5 Female Connector 2x5 Pitch 2.54 mm Title I2C Address: Read: 0x91 Write: 0x90 +3V3 RS (405-9517) AVX (TAJR106K006R) +3V3 J7 2 4 6 8 10 Extended Connector +3V3 U2 I2C2_SDA 1 B Pressure Sensor LPS001DL For further details please refer to datasheet GND Power Selector GND Murata (CSTCE8M00G55-R0) DigiKey (490-1195-1-ND) RS: 283-961 Farnell: 1615352 HP Filter Disabled: Assembly R/C3 --> R 0 Ohm Not Assembly R76 1M Ohm +3V3 R34 10k +3V3 12 SDCard_CMD OSCOUT 10nF HP Filter Enabled: Assembly R/C3 --> C 4.7 uF Assembly R76 1M Ohm 15 13 SDCard_D3 Y3 LYaw_Vref LPR_Vref HP Filter Enabled: Assembly R/C2 --> C 4.7 uF Assembly R85 1M Ohm HP Filter Disabled: Assembly R/C2 --> R 0 Ohm Not Assembly R85 1M Ohm 14 SDCard_D2 Yaw_OUT C55 7 LGA 10 12 pF DigiKey (300-8633-1-ND) Farnell: 1457098 Citizen (CM130-32.768KDZF-UT) R75 27k PR_Y_1xOUT C63 R85 Not Mount 1M C17 12 pF LP Filter (Reccomended) 6 LP Filter (Reccomended) R83 27k Not Mount R84 0R 18 22 LPR_Vref 24 Gyro_PR_RST 9 19 27 ST_LPR 28 PD/Sleep_LPR 17 VCONT FILTVDD VREF ST HP VDD VDD PD/Sleep NC RES 6 Default 1 0R HP Filter (Optional) Default: R --> O Ohm R/C2 R 0 / C 4.7uF 20 PR_Y_4xOUT 14 16 9 C OSCILLATORS TY Test Point: Vero technologies: 20-2137 Yaw_OUT RS:101-2391 C50 10nF TP Yaw_OUT GND RES RES GND 8 5 2 3PR_Y_1xOUT LPR430AL OUTY 2 7 SDCard_D1_PC9 VCC DAT2_In 1 PR_Y_OUT R78 PR_Y_OUT R79 10K 1 6 SDCard_D0_PC8 RDATA_VCC RDAT3_GND GND SDCard_CLK_PC12 WP/CD 17 4 5 4 HP Filter Disabled: LPR_Vref Assembly R/C1 --> R 0 Ohm Not Assembly R81 1M Ohm U14 SDCard_CMD_PD2 2 3 R86 0R HP Filter Enabled: Assembly R/C1 --> C 4.7 uF Not Assembly R81 1M Ohm NC LPR_Vref +3V3 PR_X_4xOUT 8SDCard_D1 7SDCard_D0 6 5SDCard_CLK 4 3SDCard_CMD 2SDCard_D3 1SDCard_D2 4xOUTX 10nF DAT1 DAT0 VSS CLK VDD CMD CD/DAT3 DAT2 8 R81 1M Not Mount microSD Hirose Electric: DM3AT-SF-PEJ Digikey: HR1939CT-ND U13 OUTX 7 1 27k 23 C62 CN2 HP Filter (Optional)Default: R --> O Ohm R/C1 R 0 / C 4.7uF R80 25 LP Filter (Reccomended) PR_X_1xOUT 26 SW2 SW PUSHBUTTON-DPST RS (505-9186) C&K (Y78B22110FP) GND OUTZ 1PR_Y_4xOUT R82 0R Not Mount RS (505-9186) C&K (Y78B22110FP) GND RES RES TP PR_Y_OUT C58 10nF C59 470nF X RST VDD 10 ST TP LPR_Vref DigiKey: 587-1093-1-ND 2 0R B SW PUSHBUTTON-DPST 25 I2C1_SDA LSM303DLH Default: R --> O Ohm HP Filter (Optional) R/C3 R 0 / C 4.7uF VCONT U12 GND C57 100nF 10uF 6.3V 1PR_X_4xOUT C25 100nF 24 I2C1_SCL TP LYaw_Vref C52 100nF PD/Sleep 10uF 6.3V TG TP Ground 3PR_X_1xOUT A C53 470nF C56 TP PR_X_OUT R77 3 LGA 28L DigiKey: 587-1093-1-ND Test Point: Vero technologies: 20-2137 RS:101-2391 T4 LPR_Vref RS (405-9517) AVCC AVX (TAJR106K006R) Default 1 2 INT2 18 Mag_DRDY C16 PR_X_OUT 1 RES 19 I2C1_SDA 1-AXIS Gyroscope LY330ALH (Yaw) For further details please refer to datasheet and User Manual 5 R22 10K SDCard_D3_PC11 INT1 GND 2-AXIS Gyroscope LPR430AL (Roll/Pitch) For further details please refer to datasheet and User Manual Push_Button SDCard_D2_PC10 13 SDA_A RES RS (405-9517) AVCC AVX (TAJR106K006R) PR_X_OUT R21 10K microSD SCL_A RES R73 56R GREEN Kingbright KP2012MGC RS: 466-3778 Farnell: 8529906 LED 0805 +3V3 GND DRDY_M Y SA0_A +3V3 GND TR GND VDD_IO_A RES PB15 PB14 PB13 PB12 PB11 PB10 +3V3 SDA_M C1 C51 GND +3V3 C24 100nF SET1 4 11 I2C Address Magnetometer: Read: 0x3D Write: 0x3C User_LED RED Kingbright KP2012SURC RS: 466-3829 Farnell: 8529930 LED 0805 RESET# 15 16 SA0_A +3V3 2.2uF I2C Address Accelerometer: Read: 0x33 Write: 0x32 LED RESET PS BUTTON D3 RES_CAP C49 GND 12 18 63 47 31 STM32F103RET7 SDCard_CLK_PC12 SDCard_D3_PC11 SDCard_D2_PC10 SDCard_D1_PC9 SDCard_D0_PC8 GPIO4_PC7 nOS/INT LYaw_Vref Yaw_OUT GPIO3_PC3 LPR_Vref PR_Y_OUT PR_X_OUT NC 13 VDDA 19 VDD_4 64 VDD_3 48 VDD_2 32 VDD_1 1 VBAT STM32F103RET7 PB0 PB1 PB5 PB6 PB7 PB8 PB9 59 Mag_DRDY 61 User_LED 62 53 52 51 40 39 38 37 25 24 11 10 9 8 20 I2C1_SCL 16 15 14 13 USBDM 3 USB_DISCONNECT PC12 PC11 PC10 PC9 PC8 PC7 PC6 PC5 PC4 PC3 PC2 PC1 PC0 NC GND PA0-WKUP PA1 PA2 PA3 PA4 PA5 PA6 PA7 PA8 PA9 PA10 PA11 PA12 SCL_M VDD VDD RES VDD_IO ID nc GND SHELL SHELL SHELL SHELL 5 C48 2.2uF SET2 3 10 11 12 2 12 10 UART2_CTS 14 UART2_RTS 15 UART2_TX 16 UART2_RX 17 SPI1_CS 20 SPI1_SCK 21 SPI1_MISO 22 SPI1_MOSI 23 GPIO1_PA8_MCO 41 INT1_PS 42 USB_DISCONNECT 43 USBDM 44 USBDP 45 C35 100nF U5 SOTT323-6L 6DP D1 D4 USBDP 1 C47 100nF C46 100nF 2 4 5 6 7 8 9 +3V3 50 JTDI 49 JTCK 46 JTMS 56 JNTRST 55 JTDO 54 SDCard_CMD_PD2 2 Push_Button 2 GND PA15-JTDI PA14-JTCK PA13-JTMS PB4-JNTRST PB3-JTDO PD2 PC13-TAMPER-RTC VDD_4 C34 100nF GND USB_miniB VBUS DM DP 1V8 +3V3 D LQFP-64 1 GND PC14-OSC32_IN PC15-OSC32_OUT PD0 OSC_IN PD1 OSC_OUT NRST BOOT0 PB2-BOOT1 9 1uF 6.3V CN1 1 2 3 +3V3 U11 4 USB_5V U6 OSC32_IN 3 OSC32_OUT 4 OSCIN 5 OSCOUT 6 RESET# 7 BOOT0 60 PD/Sleep_LPR 28 C29 100nF +3V3 GND AVCC C44 100nF 10uF 6.3V 8 C66 10nF +3V3 VDD_1 C26 100nF RS (515-1995) Molex (54819-0572) R23 1M RS (405-9517) AVX (TAJR106K006R) 14 GND RS (405-7779) AVX (TACL105M006R) C27 Dimension 1608-10 metric equal to 0603 2 4 C65 1uF +3V3 VBAT 5 VOUT BYPS VIN SOT23-5L 1V8 VDDA Vdd_4 Vdd_3 Vdd_2 Vdd_1 VBAT INH LD3985M18R VSSA Vss_4 Vss_3 Vss_2 Vss_1 3 GND Place near MCU VDD_2 C C20 1uF 6.3V C45 1 +3V3 L2 30 Ohm 3A 1 2 Wurth Electronics: 74279206 RS: 358-6765 DM DP C19 100nF GND AVCC USB GND Vin U15 C13 10nF RS (405-7779) AVX (TACL105M006R) Dimension 1608-10 metric equal to 0603 VDDA RS (405-9517) AVX (TAJR106K006R) Dimension2012-12 metric C23 10uF 6.3V equal to 0805 C22 100nF PD/Sleep_LYaw 8 3 INH C43 2.2uF 6.3V AVCC +3V3 VDD_3 GND BYPS 2 4 R69 0R +3V3 5 SOT23-5L C64 33nF D 10K BOOT0 3 Default 3 LDS3985M33R VOUT Z VIN X U10 1 C42 1uF 1 LSM303DLH 6-axis Geomagnetic Module For further details please refer to datasheet MCU STM32F103 For further details please refer to datasheet 1V8 1 STLM75DS2F STEVAL-MKI062V2 STMicroelectronics Size Document Number Custom Rev 1.0 iNEMO V2 Date: 5 4 3 2 Figure 8: STEVAL-MKI062V2 data sheet 14 Thursday, April 08, 2010 Sheet 1 2 of 2