1
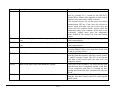
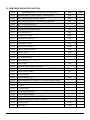
7.4.10. Drive ENC7 fault: It is impossible to do the "Autotune" when the speed drive is power supplied and that the ENC7 fault instantly appears, the problem has to be solved. If there is no communication between the encoder and the speed drive, check the power supply and the encoder connections. Check if the encoder type is "SC.ENDAT" in parameter "0.50". If the distance between the encoder and the controller is more than 46 meters (150 ft), it can cause a loss of voltage in the encoder cable. To solve temporary this problem, modify parameter "0.51" (DRIVE ENCODER SUPPLY VOLTAGE) to 8V (for 8 volts). Note: The encoder "SC.ENDAT"operates at 5 volts +/- 5 %, a maximum of 5.25 volts. If the voltage is higher than that, contact Automatisation JRT inc. because a modification is needed. Two solutions are possible; enlarge the wiring of the encoder cable to a calibre of 20 or install an interface to increase the encoder voltage to 5 volts). 7.4.11. Drive ENC10 fault: Check the encoder cabling. Make sure that the encoder rotor is well fixed and that it doesn’t turn according to the motor rotor. Check if the dephasing value "0.43" has been modified. Redo the Autotune. 7.5. PROGRAMMING THE SPEED DRIVE GAINS: Automatisation JRT Inc has programmed these parameters. However they can be modified in order to obtained optimum elevator performances. 7.5.1. Speed drive gain: The UNIDRIVE SP drive has proportional gain, integral gain and differential gain (Kp1, Ki1 and Kd1). As the following table: Parameter 0.07 Description Value and explication Speed controller P gain 1 (Kp1). Proportional Speed controller I gain 1 (Kil). 0.08 Integral 0.9 Speed controller D gain 1 (Kd1). 7-11 0.3000 (1/rad s-1): generally between 0.1000 and 0.6000 per step of 0.05. If the value is too low, the speed will not be constant(See param. 0.10 on the drive). If it is too high, there will be vibrations in the motor and its noise will be louder. 4.000 (1/rad): generally between 1 and 8 per step of 0.5 or 1. If the value is too low, there will be an important speed fault during speed changes, for example at the end of the deceleration (see param. 3.03 on the drive). Also the elevator will have an important "ROLL BACK". It can be raised of about 5 to diminish that effect. If it is too high, there will be vibrations in the motor and its noise will be louder. 0.1200 (sec): generally between 0.06 and 0.25 per step of 0.02, deletes the "Overshoots" and the