1
Final Report of Senior Design Project
Winter/Spring
2002
The University of California at Riverside
Department of Electrical Engineering
Machine Vision Interface With Seiko Robot Arm II
Prepared by: Zhi Xu and Ghazi Ting
Technical Faculty Advisors: Mr. Dan Giles, Principal Electronics Technician
Dr. Gerardo Beni, Electrical Engineering Faculty of the University of California at
Riverside
This project is support by the Electrical Engineering Department of the University
of California at Riverside
Submitted on June 7, 2002 at 5:00 PM
Executive Summary - The objectiveof this project is to createa third party vision
systemto be utilized by the SeikoD-TRAN RT3200robot arm that belongsto the
Electrical EngineeringDepartmentof VCR. Working with the Visual Basic 6.0 platform
startedby last year's seniordesigngroup,the industrial imageprocessingsoftware
VisionBlox is usedto designa vision systemcapableof live image. A user-friendly
interfacehasbeendevelopedto integratethe Seiko robot with the vision systemso the
two componentscan operatetogether. In addition, with the interfaceuserscancontrol
the robot and usethe vision systemwithout any prior knowledgeof DARL commandsor
VisionBlox. With the aid of the vision system,the arm is ableto perform regular
industrial type task suchasperformancecheck,object detection,and objection
recognitionautomatically. The developedvision systemhasmadethe robot muchmore
userfriendly and its capabilitieshaveincreasedtremendously.An updatedrobot was
developedby Seiko modelD-TRAN RT330 that hasthe vision feature,which showsthe
importanceof our project and the real life applicability of a vision systemfor the RT3200
robot arm.
Keywords - robotics,vision system,serialport communications,automation,object
detection
Table of Contents
Page
Chapter 1
- Introduction
1.11ntroduction
1.2 Historic Background
1.3 A Glossaryof Acronyms and Abbreviations
Chapter 2
-Design and Technical Formulation
2.1 Introduction
2.2 Problem Statement
2.3 Design Specification
2.4 DesignApproach
2.5 Alternative Approaches
Chapter 3
3.3 Design Comparison/ Design Trade Off
4.3 Marketability
9
9
9
- Meeting Expectations
5.1 Introduction
5.2 Design Constraints
5.3 Elementsof Design
Chapter 6
4
4
8
-Administration
4.11ntroduction
4.2Budget/ CostAnalysis
Chapter 5
2
2
2
3
3
-Design Evaluation
3.1Introduction
3.2 TestPlan and Result
Chapter4
1
1
1
10
10
10
-Conclusions
6.1 Introduction
6.2 Design Expansion / Improvement Suggestions
6.3 User's Manual
Appendix A: Parts List
Appendix B: PX610 DLL Library Code
Appendix C: Visual Basic Form Codes
11
11
12
Appendix D: Technical Specifications
15
16
22
23
24
26
33
References
Acknowledgement
36
37
- Livelmage
- Controller
- Commands
-
Chapter 1 Introduction
1.1 Introduction
The driving force for this designis to fulfill the seniordesigncourserequirements
for the Electrical EngineeringDepartmentat the University of California, Riverside. For
two quarters,everyundergraduatestudentin the Electrical Engineeringmajor at the
University of California, Riversidemust presenta designproject to the Electrical
EngineeringDepartmentprior to graduation. The undergraduate
studenthasthe freedom
to selectany designproject ashe or shepleases,but with the approvalof the advising
professors.For our seniordesignproject, we decidedto continuethe Machine Vision
Interfacewith Seiko Robot Ann project startedby prior undergraduatestudentsat
University of California, Riverside. The main objectiveis to developa machinevision
interfacefor the Seiko RT3200Robot Ann in one of the UCR' s Electrical Engineering
DepartmentLaboratory. The Seiko RT3200 Robot Ann is an industrial robot that can be
usedfor many applications,andby addinga vision systemto the robot will greatly
improve its capabilitiesand value. Also, oncethe vision systemis complete,it can be
marketedand implementedfor other Seiko RT3200 Robot Ann that needsa vision
system. Section 1.2talks aboutthe Historic Backgroundof the robotic industry and
section 1.3containsa Glossaryof Acronyms and Abbreviationsimportantto this report.
1.2 Historic Background
The SeikoRT3200Robot arm is an industrial robot, and it is of the cylindrical
type. It is a hybrid mix that incorporatesthe rotary motion of the SCARA andthe linear
motion of a CARTESIAN. Therearefour axis of movementfor the robot. (x, y, z, a).
The x-axis and the y-axis take careof the flat surfaceof the robot's movementwhile zaxis mapsthe height of the robot. The a-axisis rotationalmovementof the end-effector
on the robot. The RT3200hasa standardcycle time of 0.8 secondsthat the robot can
work in, a very high speedcompareto any other kind of robot. DARL is the original
imagedevelopedby Seiko for the RT3200model robot, which is very similar to the
programminglanguageBASIC.
1.3 A Glossary of Acronyms and Abbreviations
UCR - University of California. Riverside
DARL - ~Tran AssemblyRobot Language
Visual Basic - Computerprogramminglanguagethat runs in Microsoft Window
End-effectors- The tool at the end of the Seiko RT3200robot usedto perform specific
tasks.
Seiko RT3200-Industrial robot usedin the productionindustryto perform assembly
typejobs.
Editable Image- This is the display of imageentire imageon the userinterface
Train Image- The small region within the editableimageuseto selecta specific object
out of the whole image
-
Chapter 2 Design and Technical Formulation
2.1 Introduction
The designapproachesselectedfor this project makeuseof the work completed
from last year's seniordesigngroup and improveon their work. The main part of the
designdealswith controlling the SeikoD-TRAN robot in Visual Basic and incorporating
a third party vision systemto be Usedby the Seiko robot. Section2.2 will containsthe
ProblemStatementand section2.3 is the Design Specifications. In sections2.4 and 2.5,
the focus is on the DesignApproachand the Alternative Approachesto the project.
2.2 Problem Statement
The goal of this project is to upgradethe SeikoRT3200 so that it utilizes a third
party vision system. The problem includescreatingvision softwarethat can incorpomte
the alreadyexisting VisionBlox softwarewith the Seiko robot arm. In addition, the
vision systemneedsto be ableto recognizesometrained objectsand perform particular
task with the object. Moreover,the vision systemneedsto be able demonstratesome
automationprocedurewith the robot arm.
2.3 Design Specifications
The specificationfor our designrequiresthe vision systemto be ableto capture
and analyzean imagein real time. The robot also needsto be ableto be controlled
througha personalcomputer. Using the PC, a vision systemmust be incorporatedinto
the SeikoRT3200 robot. The vision systemthat needsto be createdhaveto be ableto
recognizean object, get the coordinatesof the found object, andthen sendthe coordinates
of the object to the robot so it can interactwith it. Automationbetweenthe vision system
and the Seikorobot arm is desirablefeatureof the designproject.
2
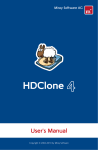
Fig. 2.2 Technical Design
2.4 Design Approach
The approachtakento fulfill the specificationsof our seniordesignproject is to
continuewith the developmentof last year's seniordesigngroup. In the precedingyear,
a group of seniorsin the University of California, RiversideElectrical Programstarted
the implementationof vision for the Seiko robot arm. They wereable to utilize Visual
Basic 6.0 to incorporatethe vision softwareVisionBlox and the Seiko robot language
Darl to work togetherasoneentity. With partsof the machinevision interfacealready
developed,we neededonly to continuethe developmentby upgradingthe capabilitiesof
the vision system,creatinga more userfriendly interface,and making the Seiko D-TRAN
RT3200 Robot Arm havea totally automatedvision system.
2.5 Alternative Approaches
Another possibleapproachcould havebeento start the project fresh and not use
the codesprovidedby last year's group. The advantagewould be that we will havetotal
control of the decisionsof the project and any errorsor issuesthat ariseswe would be
ableto answer. The drawbackto this approachis that we would be reproducingmanyof
the sameinformation that is alreadyavailableandthe differencefrom continuing from
last year's end point versusstartinganewmight be minimal. Otherpossiblealternative
approachescan be found in section3.3 of the report.
3
-
Chapter 3 Design Evaluation
3.1 Introduction
The most important measureof the effectivenessor how good the designof this
project is dealswith the compatibility and accuracybetweenthe robot and the vision
system. Therefore,most of the test were focusedon the vision systembeing able to
identify anddifferentiateobjectsin an imageanddeterminewhetheror not the trained
object is in the image. Next, how accurateis the robot in going to location of the desired
object specifiedby the vision system. From the resultsof our tests,we concludethat are
designhasachievedthe satisfactorylevel that we desire. Section3.2 is the Test Plan and
Result,and section3.3 is the DesignComparisonI DesignTrade Off.
3.2 Test Plan and Result
.
.
.
.
.
.
.
.
.
.
Delay neededwhenmoving robot with VB
Sendingcommandsusing VB throughserialport
Capturingand storing of live image
Parametersfor comparingtrainedwith live image
Pixel to world coordinatesystemcalculation
Accuracyof the vision systemin real time
The repeatabilityof the robot
The capability of the vision system
A compatiblespeedbetweenrobot and vision
Ability to perform multiple task simultaneously
(Vision)
Using the FeatureFindToolin VisionBlox to comparean object
Utilized the savecommandfrom the Controller form to storean imageand
then wrote a load function in the Commandsform to load the saved
imagessaved. Next, the FeatureFindTool.Found
function wasusedto
return the comparisonresult anddisplayedin a text box. The
FeatureFindToolcompareseverythingwithin the trainedregion, so if the
sameobject is placedon a different backgroundfrom the trainedimage,
FeatureFindTool.Found
will likely to return a False. Settingthe
minimum % on the form will changethe FeatureFindTool.MinScore
and
this can makesomedIfference. Test showsthat 75% works well for
objectswith the sameobject type. The test we usedis two washers.
Testing for the MinScore Value:
Comparingtwo washers.(WasherA is the washerin the trainedimage).
4
True
(0 - 100)
False
none
Washer B -
True
(0 - 89)
False
(90-100)
WasherA
True
(0 - 87)
False
(88 - 100)
WasherB -
True
(0 - 88)
False
True
(0 - 84)
False
(85 - 100)
WasherC True
(smallerwasher) (0 - 34)
False
(35 - 100)
Original image: WasherA
Image2
Washer A -
Image 3
(89- 100)
Training an image
The edshpTrain.LoadandedshpTrain.Save
is usedto load and savean
imagein the editableshaperegion of the editableimage. To usethe
FeatureFindTool.Found
function, the imagemust be first trained. The
edshplnspection.save
andFeatureFindTool.save
shouldalwaysbe used
wheneverthe edshpTrain.Save
commandis used. The samefor the
edshpTrain.Loadcommand. It appearsthat the CaliperTool commands
works the sameway asthe FeatureFindTool,but therewereerrors when
we try to incorporatethem into our program,mainly whentraining the
CaliperT001.
SavingandLoading an image.
Mainly to !\toreand load the imagein the editableimageand the editablc
train shaperegion. It is possibleto load an editableimageand a trained
imagenot in the editableimage.
Getting coordinateswhen a trainedimageis found in the editableimage.
The commandsFeatureFindTooI.ResultX
andFeatureFindTooI.ResultYis
usedto get the centerposition of the trainedimagewith respectto the
editableimagewhen FeatureFindTool.Found
returnsa True. The top left
comer of the editableimageis (0,0) andthe bottom right comer is
(640,480). Theseare pixel coordinatesand a calculationwill be neededto
convertthe coordinatesinto spatialcoordinatesso the Seiko Robot can
utilize it. More detailson the conversionfrom pixel coordinatesto world
-~
coordinatein the Robotic test section
Displaying live imageson the editableimage
The imagecapturedby the frame grabbermust be storedonto a temporary
variableand then using the temporaryvariableto haveit display on the
editableimage. Look at the PrivateSubRunProg() function to seehow
this is done. I tried utilize the OCX file for the frame grabberto set asthe
video card and referencethe imagefrom the frame grabberto the editable
imagedirectly without first storing it in a temporaryimage. However,I
wasunableto referenceframe grabbercard in my codeandhad usethe
alternateoption.
Automatingthe processof displayingthe live images
.
To automatethe process,I createda Do-While a loop to continue
referencethe frame grabberimageto a temporaryimageand compareit
with the storedtrainedimage. If a trainedimageis found, then the process
stopsand the Pick( ) function is called. At first, I thoughtthe loop I
createdwas causingthe computerto freeze,but after placing a variableto
count the loops and settinga limit on how much the PrivateSub RunProg(
) loops, the freezeseemsto comefrom the infinite loop of the image
alwaysreturningFalse.
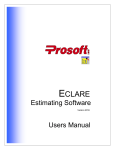
(Robotic)
(R.O)
640
pixel
x
512
pixel
y
(641,512)
Fig. 3.1 Pixel Coordinate
6
Testingmovementlimitation of the robot arm
Home position is 300. O.O.O.
X is from 300 to 600
Y is from -277.615 to +277.615
Z is from -120 to 0
A is from -100degreeto 100 (for the end-effector)
For all movement of the robot, we first programmed and tested it
in DARL first and then after it works, the code is incorporated into the
Visual Basic code.
Testing for delay on the robot
First we set the robot at speed 50, while teaching the robot to learn
a new position a small delay is needed, and we set it to 5. When I try to
move the robot ann from one position to another position, another delay is
neededto allow the robot time to get to the new position. The delay was
first set to 50, which is too short and the robot sometimes will skip
commands. So the delay has been set to 100 now it works fine.
Then we try to set the robot at full speed 300, between teaching the
robot to learn a new position the delay was set to 5. When we try to move
the robot arm from one position to another, the delay is set to 40 and it
works fine. Shorter delay will work for shorter distance traveled by the
robot, but delay 40 is a safe and reasonable delay time.
Delay function used is actually a for-loop that just loops multiple
times. Delay of 1 is equivalent to 1,000,000 loops.
Converting pixel coordinate system to world coordinate system
When camera to ground height is 45Omm, the screen is IIOmm X
9Ornand pixel to mm conversion is 1:5.8mm. When we try to use the
conversion to get the robot to the converted location at this height, it is
always off. We found out that the camera is not mounted at the center of
the robot and is the cause of our conversion to be off.
Later, we found at the 45Ornm height, the image is out of focus.
So the new height that the image is in focus and the end-effector can still
pick up object is at the height of 340mm. At this height, the screen is
95mm X 67mm and the pixel to mm conversion is 1:6.737. At each
height, to test for screen size and unit conversion, four comers are drawn
on a paper at the size of the screen. Displayed on the screen, and using
image size on screen and the size of the four comers, the new unit
conversion is determined. To test, object is set at different location and
the robot will try going to the object. Many trials are taken to test for
accuracy.
7
3.3 Design Comparison I Design Trade OfT
Therearetwo major changesthat we madeto our original designplan, useof the
CaliperToolfeaturein VisionBlox andthe workspaceusedfor our automationsystem.
Originally, beforefully understandingthe capabilitiesand functionality of the
FeatureFindToolof VisionBlox, we wereconsideringaddingthe CaliperToolcomponent
to our vision system. We assumedthat without somesort of way to separatethe
foregroundfrom the background,therewill be no way to detectan object. However,
sincewe can control the background,we forced the backgroundof all imageswe work
with to be alwayswhite or black. With the ability to control the background,thenjust by
usingthe FeatureFindToolwe are ableto utilize the featuresof an object aloneto
distinguishone object from another.
Another major changewe madeto our original designwas the workspacefor the
robot when we automateour vision system. Originally, we were planningto havea box
shapedworkspacefor our vision systemandrobot would scanfor objectswithin that
workspace.To do this would requiresomeextremelydifficult algorithmsto computethe
translationfrom the pixel coordinatesystemto the world coordinatesystem,however,so
we simplified the processby having the robotjust scanforward. To havethe workspace
of a box would requirethe robot andcamerato move sideways,which can throw off the
cameraorientationwith respectto the robot sincethe camerais mountedon the robot.
For when the robot movesin the y direction,the whole camerais rotatedby some
inconsistentdegree,which would be difficult to calculatethe relationshipbetweenthe
robot movementswith respectto the anglechangeof the camera. By not having the
robot being ableto move sidewayslimits the workspacein which our robot can work
with in our automationmode,it simplified our calculationof translatingpixel locations
into world locationsthat the Seiko robot can use.
R
-
Chapter 4 Administration
4.1 Introduction
Our project is a continuationof an existing project; thereforewe did not spend
any moneyfor this project. The Budget/CostAnalysis of section4.2 containsprices of
what it would havecost had we had to buy all the partsourselves.Section4.3 talks about
the Marketability of the designwe help develop.
4.2 Budget/Cost Analysis
Seiko D-TRAN RT3200
...
$ 10,000
Visionl Mono-kit:
Hitachi KP-M2 Camera
IrnagenationPX610 PCI Frame-grabberCard
VisionBlox software
. 12 volt DC PowerSupply& Cables
Computar C-Mount, 25mm, fl.3 lens
Visual Basic 6.0
Developmentcost:
200 hoursx $100per hour
$1,975
$128
$99
.
$20,000
Total:
Purchasinl! newer model:
Seiko RT 3300
$32,202
$60,000
4.3Marketability
The newermodel RT3300,which is basicallythe samerobot asthe RT3200
modelbut with a vision system,is priced at $60,000. Evaluatingour budget/cost
analysis,it showsthat we will be able to provide the vision systemwe developedand
offer it at a much lower price. Being that the developmentof the vision systemwith the
SeikoD-TRAN RT3200 is alreadycomplete,it is possibleto sell the vision systemat a
much lower cost than the $32,202shown. Seikohassold many RT3200robots,which
meansthat thereare manypotential RT3200ownersthat would needvision system
update. With our ability to offer our vision systemat a much lower price than purchasing
a RT3300for that includes,companiescan savea greatdealof money. Evaluatingthe
existing optionsof currentRT3200model owners,it appearsthat thereis a possibility of
a very profitable opportunityif our vision systemis marketedproperly. However,due to
limited researchand knowledgeaboutthe numberof ownersof the Seiko RT3200robot,
it is impossibleto predict the size of the marketfor our product.
9
-
Chapter 5 Meeting Expectations
5.1 Introduction
Our project hasmet all the specificationsin the problemstatementalongwith all
of our primary objectives. The robot cannow be controlledthroughVisual Basic, and
with the addition of the vision systemthe robot can also scanfor objectswithin the
vision's workspaceand perform specifiedtask. The vision systemhasincreasedthe
capabilitiesand valueto the Seikorobot arm. The DesignConstraintsare shownin
section6.2 and the Elementsof Designare in section6.3.
5.2 Design Constraints
Sinceour project is a continuationof last yearsdesign,we are limited to the
approachesand direction in which we cantake our design. Due to last year's project, we
were limited to using Visual Basic asour programminglanguage,which links the
controller of the Seikorobot to the vision system. We were also constrainedto the
VisionBlox softwareto perform our imageprocessing.The camera,frame grabbercard,
andthe serialport were all hardwarepartsthat we were limited to usefor our project.
Another constraintto our project is the end-effectorthat was providedby the
Electrical EngineeringDepartmentof VCR. The end-effectorprovidedis very small and
haveno real life applicability. We will not be able get a new end-effectorbeforethe end
of the 2002 Springquarter,the demofor our project will be severelylimited
5.3 Elements of Design
The usesof robotics in the industrial field havelong beenan acceptedand nonnal
practiceof the industry. Thereare manybenefitsof usingroboticsfor production;such
as safety,productive,reliable, and relatively cheapcomparedto humanlabor. For
example,when working with dangerouschemicalsor in unsafeenvironments,robot can
be usedto get thejob donewithout endangeringpeople'slives. Robotsare alsovery
productivefor it canperfonn specifiedtask at a very high speedwithout ever havingto
take a break. In most cases,machineswill outperformhumanlabor drasticallyin any
massproduction. With the advancementof roboticsand technology,the robotsused
today in industry are extremelyreliable and our experiencesworking with the Seiko
RT3200 agreeswith that. Although purchasingan industrial robot might seemquite
expensive,oncethe robot is purchasedthe costto maintainand reuseis relatively
minimal. So in the long run, the useof robotsfor industrial applicationswill save
companiestremendouslyin cost.
Therewill alwaysbe critics that will opposethe useof robotsfor the fear of
losing all jobs to machines. It is true that machineryand roboticshavetaking over many
of the productionthat usedto be doneby people,but by using robotics it hasalso made
many things much more cheaperand available. So until somethingmajor eventoccurs,
machineryand robotswill continueto be integratedinto our everydaylives and continue
to grow.
10
Chapter 6
- Conclusions
6.1 Introduction
The problemstatementof this project is to upgradethe Seiko RT3200 so that it
can utilize vision by incorporatinga Visual Basic interfaceusing the softwareVisionBlox
to implementwith the Seiko robot arm. The robot will be ableto recognizetrained
objectsand perfonn a particulartask with the object. We havesucceededin controlling
the robot by using the Visual Basic userfront and the vision systemcan recognizea
trainedimagewe specified. Using a trained image,we areable to get the Seiko robot to
scana particular workspacefor the trainedobject. Then,oncethe trainedobject is found,
we are able to allocateto the robot the location of the object and haveit pick it up, and all
of this can automated.Therefore,we have accomplishedall the goalsthat we setout to
accomplishandthe rest will be left to the future seniorsthat will be working on the
improvementof this project.
6.2 Design Expansion I Improvement Suggestions
Therearemany suggestionsthat we havefor the improvementand expansionof
this project in the future. The first is to mount the camerain a higherposition so that the
picturescapturedby the camerawill be in a betterfocus. As of now, the height of the
object from the end-effectorwhen the imageis in focus is far too low, and whenthe endeffector tries to pick up a focusedobject, it cannotreachit. The alternativeto this
approachmay be making a 10ngerend-effectorso that the end-effectorcan reachto a
lower position, and thereforewill not needto changethe position of the camera. The
secondapproachmay be betterbecausethe calculationof the pixel to world coordinate
systemwou1dstayre1ativelythe same. Importantnote, if the cameraand the distance
betweenthe platform is changed,then the areaof the camerarelative to the spatialarea
will also change,causingthe pixel to world coordinatesystemcalculationto changeas
well.
Another suggestionwe havefor the improvementof this project is to changethe
end-effectoron the Seiko RT3200robot arm to somethingmuchmoreuseful. The endeffector we havenow is ableto pick up 2-4 rom wide objectsonly. We suggestbuying a
new end-effectorthat can actuallybe usedto do somethingmuch more useful so a more
impressivedemonstrationcanuseto showcasethe usefulnessof the project.
Other suggestionsthat future groupscan also considerare:working in C instead
of Visual Basic,incorporationthe vision systemfor the Adaptecrobot, storing the
commandsto readcodethroughthe serial port, and addingmore featuresto the existing
vision system. The reasonfor working in the computerlanguageC is becausethe PX610
driver seemsto be morecompatiblewith C, and all its samplecodesare in C, thereforeit
will be much easierto implementnew featuresin the future. Also, vision systemcreated
for the Seiko robot shouldbe easily incorporatedinto the Adaptecrobot. Of coursethe
commandsto control the robot andcameralocation will be different, the generalstructure
shouldbe the same.
One of the additionsthat we were meaningto addbut did not get to is getting rid
1
of the input commandsof
DO COMM 1 78
DO OUNU 1
DO IUNff 1
When going from the control pendantto the Visual Basic program,thesethreecommands
must be first typed on the control pendantto get the controller to respondto commands
sentthroughthe serialport. This is a redundantprocedure,and getting rid of it will
pleasefuture userswho want to sendcommandsto the robot via the serialport. Finally,
this project canbe improvedalsojust by addingmore featuresand functionality to the
existing vision system. The addition of edgedetection,caliper, and blob tools of
VisionBlox would be greataddition to the existing vision system.
6.3User'sManual
To startcontrolling the robot from the computer,first you haveto type three
commandsfrom the teachpendant:
DO COMM 1 78
DO OUNlT 1
DO IUNff 1
Theseinputs instructsthe controller to readcommandlines throughthe serialport
insteadof the teachpendant. So all commandsforth is assumedto be typedusing the
Visual Basic interfacecreated.
Buttons:
Calibrate- go to HOME position
Load Image- Loadsa bitmap imageonto the editableimagescreen
SaveTrainImage- Savesthe imagecurrentlyon the edshpTrainof the FeatureFindTooI
Pick - Calls the function that movesthe robot to pick up an object
Live Mode - Performsthe scanningand picking up the trainedobject
Display Livelmage- Goesto the live imagescreenandcontroller display
Move Ann - Moves the robot to a specifiedlocation
TrainImage- Trains a specific region of an imageand the imageis usedfor recognition
Use TrainImage- This checksif the train imageis currently on the editableimage
display,andif so, the coordinatesof the object is displayed
Exit - Quits the program
Textbox:
World Loc - Displaysthe location of the object with respectto the robot, theseare
coordinatesthat the robot usesto pick up the object
Pixel Loc - The location of the object with respectto the editableimage
12
Loop Counter- Use to displaythe numberof scanswhen in the live mode
FoundObject - Returnstrue or false that the object is in the editableimage
Minscore- Use to control how similar an object hasto be with respectto the train image
before it is consideredthe sameobject
Before perfonning any motion of the robot for the first time, the robot mustbe
calibrated,and clicking on the "Calibrate" button on the user interfacedoesthis.
Calibratingwill placethe robot to the HOME position.
13
~~,.
~
bll1.-'11~
Q,!
~1
N~an
~
l.t~~m'i:ii:idt~'{H:}
~
-.
I
TQo1sA(kJ.lns
~
-
~f~S~Pf~t
UAP~D
n-AArn
~
L.~
t=:;:tLaSt~~
~c~~
~.'P'~1.
~'I;:
~
Mfr:O$dtVas...
Appendix A: Parts List
Software:
Microsoft Visual Basic 6.0
VisionBlox
Darl
Hardware:
Seiko D-TRAN RT3200
Camera:Hitachi KP-M2
PersonalComputer
ImagenationPX610 frame grabber
RS232serialport
BNC video port
15
Appendix B: PX610 DLL Library Code
16
'Declarations
for
the
PXDVNT.DLL 11b~
Global fgh As Long
Global frh As Long
Global counter As Long
Sub displayit()
r-'Pim
y As Integer
, bim xdx AsAs Integer,
Integer,
dy As Integer
dx = (640& * Contro.1ler.HScroll1.Value)
dy = (480& * Controller.HScrolll.Value)
x = (640&
dx) * LiveImage.HScroll1.Va.1ue
y = (480&
dy) * LiveImage.VScroll1;Value
~
-
Call
Sub
pxPaintDisplay(Livelmage.hDC,
frh,
1100&.
100&
I 100&
/ 100&
I
x,
y,
dx,
dy)
I I I I I I I "
I II'"
I '"
I I I I "8'"
'8'.)""'"
"1
WPX5.-NT.BAS
I I I I , I , I .
, , I I . , I I I , I . I I "
. .~"
, '.
"
i,
Flags
1~1
J1Obal
;lobal
~lObal
;lobal
;lobal
;lobal
;lobal
;lobal
Canst
Canst
Canst
Canst
Canst
Canst
Canst
Canst
Canst
GRAB_OFF = &HO
FIELDS = &H3
EITHER = &H3
GRAB_ON= &H3
FIELDO = &Hl
FIELDl = &H2
rMMEDIATE = &H4
QUEUED= &H8
SINGLE_FLD = &H1O
;lobal
Canst
CACHE
= &H20
Trigger
Types
= &H3
= &H2
;lobal
Const
RISING
;lobal
FALLING
;lobal
~lobal
Canst
Canst
Canst
Canst
HIGH = &Hl
LOW
&HO
DEBOUNCE = &H4
J10bal
;lobal
;lobal
Jlobal
Jlobal
;lobal
;lobal
;lobal
Const
Const
Const
Const
Const
Const
Const
Const
Strobe
Types
STROBE_O = &Hl
STROBE_l = &H2
STROBE_OFF = &H4
STROBING = &H8
STROBE_GAP = &H1O
STROBE_STOP = &Hll
STROBE_TRIG = &H12
STROBE_NORMAL
&H13
~!i;el
Const
Jlobal
Const
;lobal
=
=
SYNC~ORMAL = &H13
SYNC_OFF = &H4
Error
Uobal
Jlobal
flobal
Jlobal
~lobal
~lobal
Ilobal
Ilobal
Const
Const
ERR~ONE
Numbers
=
&HO
ERR_NOT_VALID = &Hl
Const E~CORRUPT
= &H2
Const ERR_NO_PCI = &H4
Cons t E~BAD_IRQ
= &H8
Const ~NO-.:ADDRESS
= &H1O
Const ~_DEVICES
= &H20
Const ERR_GRAB_INVALID = &HBO
File
I/O
=
Return
~lobal
Canst
SUCCESS
flobe1
Canst
Canst
FILE_EXISTS = 2
FILE_OPEN_ERROR=
BAD_WRITE = 4
BAD_READ = 5
floba1
~10ba1
11oba1
11oba1
11oba1
Ilobal
n
Const
Canst
Canst
Canst
Canst
Values
0
WRONG_BITS = 8
BAD_FILE = 11
INVALID_FRAME = 12
lobal
Const
lobal
Const
Sync Types
USER_SYNC = &HI
INTERNAL_SYNC = &:H2
WEN_SYNC= &:H4
SINGLE_FIELD_SYNC
= &:HIO
AUTOMATIC_SYNC= &:HaO
IQbal
IQbal
Const
Const
Configuration
Values
PXC_CACHE = &Hl
PXC_NONINTERLACE = &H2
lobal
~
l
Const
Const
I Const
I'
I , . ,
310ba1
31oba1
31obal
31oba1
Canst
Canst
Canst
Canst
PXC_BUS = &HCO
PXC_PCI = &HO
PXC_1O4_PLUS = &H40
PXC_COMPACT_PCI= &H80
3~1
Canst
PXC_VIDEO_DRlVE
~
= &H1OO
.1 Canst PXC_H_CROP= &H1OO
31oba1 Canst
11oba1 Const
PXC_V_SCALE = &H1OO
PXC_V_CROP= &H800
llobal
Const
PXC_H_SCALE
)loba1
Const
31abal
Const
= &H800
~lobal Const PXC_STROBES
= &H200
= &H400
PXC_WEN_SYNC
PXC_CUSTOM_HW
= &HFOOO
Setup
~lare
Function
~lare
Sub ExitLibrary
Functions
Ini tLibrary
Lib
Lib
"wpx5~t.
dll"
"wpx5~t.dl1"
() As Long
()
Frame Data Functions
)eclare
Function
AllocateBuffer
As Long)
As Long
)eclare
Function
AllocateAddress
l dy As Long,
ByVal
bits
As
Lib
.wpxS~t.dll.
Lib
As
Long)
(ByVal
.wpxS_nt.
Long
dll.
dx
(ByVal
As
Long,
address
As
ByVal
dy
As
Long,
ByVal
Long,
ByVal
bits
dx
Long,
ByVa
As
)eclare
Sub FreeFrame
Lib
.wpxS_nt.d11.
(ByVal
frh As Long)
)eclare
Function
FrameWidth
Lib .wpxS~t.dll.
(ByVal
frh As Long) As Long
Jeclare
Function
FrameHeight
Lib .wpxS_nt.dll.
(ByVal
frh As Long) As Long
Jeclare
Function
FrameBits
Lib .wpx5_nt.dll.
(ByVal
frh As Long) As Long
Jeclare
Function
FrameBuffer
Lib .wpx5~t.dll.
(ByVal
frh As Long) As Long
'FrameAddress
NOT supported
on NT
Frame
~lare
)eclare
Allocation
Grabber
Function
AllocateFG
Lib .wpx5_nt.dll.
Sub FreeFG Lib "wpx5_nt.dll.
(ByVal
~clare
J) As
Function
Long
Grab
Lib
GrabTriggered
ByVal
flags
Lib
.wpxS_nt.dll.
.wpxS~t.
dll.
)eclare
:ime
As
Function
Long,
~clare
s Long)
Function
As Long
ReadCache
~clare
Function
GrabToCache
>eclare
Function
CacheTriggered
L flags
>eclare
>eclare
As Long)
Function
Function
As Long
Wait Lib .wpxS_nt.dll.
WaitVB Lib .wpxS_nt.dll.
~clare
Function
IsFinished
~clare
Sub KillQueue
Frame
~clare
Function
Long)
As
Lib
Lib
.wpxS_nt.
Lib
Lib
Function
Function
As Long,
(ByVal
dll.
.wpxS~t.
As Long
Long,
fgh
(ByVal
dll"
fgh As Long,
ByVal
fgh
As
As
Long,
fgh
(ByVal
ByVal
frh
As
Long,
ByVal
As Long,
frh
ByVal
fgh As Long,
(ByVal
(ByVal
fgh
fgh As Long,
frh
As Long,
Long,
ByVal
BYVal
frh
As
As
Long,
flags
ByVal
(ByVal
fgh As Long,
ByVal flags
(ByVal
fgh As Long) As Long
.wpxS_nt. dll-
State
As
(ByVal
dll-
.wpxS~t.
Lib
Lib
fgh
.wpxS~t.dll.
As Long
.wpxS_nt.dll8
Grabber
SetFineGain
Lib
Long)
As
(ByVal
(ByVal
ByVal
flags
Long,
handle
As
As Long)
As
Lon
ByVal
ByVal
del time
As Long)
ByVal ac
del
flags
A
As Long
Long, ByVa
As Long
As Long)
As Long
As Long)
Functions
.wpxS_nt.dll.
(ByVal
fgh
As
Long,
ByVal
gain
As
Long,
ByVal
flag
Long
),
are
Function
SetGainRange
Lib
.wpxS_nt.dll.
19S As Long)
As Long
)eclare
Function
SetOffset
Lib
.wpxS_nt.dll.
: As Long)
As Long
~lare
~clare
ength
(ByVal n As Long)
fgh As Long)
Grab Functions
>eclare
Function
GrabContinuous
:ive As Long) As Long
~n
Functions
(ByVal
(ByVal
SetTriggerType
Lib .wpx5~t.dll.
SetLUT Lib nwpxS~t.dll.
(ByVal
lutarray
As Long) As Long
fgh
fgh
As
As
Long,
Long,
ByVal
ByVal
range
offset
As
As
Long,
Long,
ByVal
ByVal
fl
flag
(ByVal
fgh As Long,
ByVal mode As Long) As Long
fgh As Long,
ByVal first_address
As Long,
ByVal
Declare
Function
SetCamera
Lib
.wpxS-.-nt.dll.
(ByVal
fgh As Long,
ByVal camera As Long,
ByVal flag
I As Long) As Long
Oeclare
Sub ResetFG Lib
"wpx5-.-nt. dll"
(ByVal
fgh As Long)
Oeclare
Function
SetImageSize
Lib
"wpxS_nt. dll.
(ByVal
fgh As Long,
ByVal resx As Long,
ByVal res
r~
Long, ByVal xO As Long,
ByVal yO As Long,
ByVal dx As Long,
ByVal dy As Long, ByVal bits
As
to
) As Long
Oeclare
Function
SetCompare
Lib "wpxS_nt.dll"
(ByVal
fgh As Long,
ByVal n As Long) As Long
Declare
Function
SetFieldCount
Lib
"wpxS_nt.dll"
(ByVal
fgh As Long,
ByVal x As Long) As Long
, SetCurrentWindow
NOT supported
on NT
Declare
Function
As Long) As Long
Declare
Function
( As Long, ByVal
l.ong) As Long
Declare
Function
ByVal blank_length
SetStrobePolarity
SetFieldSize
xO As Long,
Lib
"wpxS_nt.dll"
Lib .wpxS_nt.dll"
ByVal yO As Long,
As Long,
ByVal
s As Long,
ByVal
(ByVal
fgh
As Long
As Long,
ByVal
field_length
Function
ReadRevision Lib .wpxS-pt.dll.
)eclare
)&clare
>&clare
Function
Function
Function
ReadProtection
HaveCache Lib
VideoType Lib
)eclare
Function
CheckGreater
~lare
Function
CheckEqual
fgh As Long) As Long
(ByVal
Lib .wpxS-pt.dll.
(ByVal fgh As Long) As Long
.wpxS_nt.dll.
(ByVal fgh As Long) As Long
nwpxS-Pt.dll.
(ByVal fgh As Long) As Long
Lib .wpxS_nt.
dll.
(ByVal
fgh As Long) As Long
Lib .wpx5_nt.dll.
(ByVal fgh As Long) As Long
GetTriggerType
Lib .wpxS-pt.dll.
(ByVal
fgh As Long) As Long
GetFineGain
Lib .wpxS_nt.dll.
(ByVal
fgh As Long) As Long
GetGainRange
Lib
.wpx5_nt.dll.
(ByVal
fgh As Long) As Long
GetOffset
Lib
.wpxS_nt.dll.
(ByVal
fgh As Long) As Long
GetCamera
Lib
.wpx5_nt.dll.
(ByVal
fgh As Long) As Long
GetLUT Lib
.wpx5_nt.dll"
(ByVal
fgh As Long,
ByVal
first_address
lutarray
As Long) As Long
CheckError
Lib .wpx5-Pt.dll"
(ByVal
fgh As Long) As Long
GetFieldCount
Lib
.wpxS-pt.dll.
(ByVal
fgh As Long) As Long
GetFieldLength
Lib .wpx5-pt.
dll.
(ByVal
fgh As Long) As Long
ReadConfiguration
Lib .wpxS-pt.dll.
(ByVal
fgh As Long) As Long
Data Manipulation
As
Function
Long
)eclare
Function
;tring,
ByVal
~lare
:-ing)
As
ReadBin
Lib
WriteBin
overwrite
As Long
ByVal
Functions
Function
Long
ReadBMP
~lare
Function
rtzing,
ByVal
~lare
Function
~lare
Function
~wpx5J1t.dll~
Long)
Lib
WriteBMP
overwrite
~wpx5_nt.dll~
Lib
As
Digital
I/O
FireStrobe
As
~wpx5_nt.dll~
Long)
As
Alias
Alias
~ReadBinA~
~WriteBinA~
Alias
Lib
frh
(ByVal
Alias
~ReadBMPA~
As
frh
Long,
As
ByVal
Long,
fname
ByVal
ByV
As
fname
St
As
~WriteBMPA~
(ByVal
frh
(syval
As
frh
Long,
As
ByVal
Long,
fname
ByVal
fname
As
St
As
Long
functions
-- strobes
and
Lib .wpxS_nt.dll.
(ByVal
GetStrobeState
(ByVal
ByV
Long
~wpx5J1t.dll~
Lib
As
res
As
As Long.
)eclare
Sub GetRectangle
Lib
~wpx5_nt.dll~
(ByVal
frh As Long,
but As Byte,
ByVal xO As Long,
U yO As Long, ByVal dx As Long,
ByVal dy As Long)
)eclare
Sub PutRectangle
Lib ~wpx5J1t.dll~
(buf As Byte,
ByVal
frh As Long,
ByVal xO As Long,
u yO As Long,
ByVal dx As Long,
ByVal dy As Long)
)eclare
Sub GetRow Lib
~wpx5_nt.dll~
(ByVal
frh As Long,
but As Byte,
ByVal row As Long)
~clare
Sub PutRow Lib
~wpx5_nt.dll~
(buf As Byte,
ByVal
frh As Long, ByVal row As Long)
~clare
Sub GetColumn
Lib
~wpx5J1t.dll~
(ByVal
frh As Long,
but As Byte,
ByVal row As Long)
~clare
Sub PutColumn
Lib
~wpx5_nt.dll~
(buf As Byte,
ByVal
frh As Long,
ByVal row As Long)
)eclare
:-ing)
p
Functions
)eclare
)eclare
Function
)eclare
Function
)eclare
Function
)eclare
Function
)eclare
Function
)eclare
Function
length
As Long,
~re
Function
),
,are Function
)eclare
Function
)eclare
Function
fgh
(ByVal
fgh As Long,
ByVal resx As Long, ByVal
ByVal dx As Long,
ByVal dy As Long, ByVal bi ts
SetVideoFormat
Lib "wpxS_nt.dll"
As Long,
ByVal flags
As Long)
Frame Grabber Info
(ByVal
.wpxSJlt.dll.
syncs
fgh As Long,
(ByVal
ByVal
fgh As Long)
command As
As
Long)
As
Long
Long
>eclare
Function
GetSyncType
Lib .wpxS_nt.dll.
(ByVal
fgh As Long) As Long
r-'ere
Function
SetDrivePolarity
Lib .wpxS_nt.dll.
(ByVal
fgh As Long,
ByVal vdrive
As Long,
ByV
t. .(irive
As Long) As Long
~clare
Function
SetDriveType
Lib .wpxS_nt.dll.
(ByVal
fgh As Long,
ByVal mode As Long) As Long
)eclare
Function
SetStrobePeriods
Lib .wpxS_nt.dll.
(ByVal
fgh As Long,
ByVal tl As Long, ByVal t
: As Long, ByVal t3 As Long) As Long
~clare
Function
SetStrobeType
Lib .wpxSJlt.dl1..
(ByVal
fgh As Long, ByVal mode As Long) As Long
Ii
veImage
- 1
'ivate
Sub FornLLoad(
Dim x As Integer
Dim y As Integer
"
**Fixed
, This
Window
requires
Size**
moving
the
scrollbars
Livelmage.ScaleMode
= 3
VScrol11.Top
= 0
VScrol11.Left
= 640
VScrol11.Height
= 512
HScrol11.Top
= 512
HScrol11.Left
= 0
HScrol11.Width
= 640
Call
pxSetWindowSize(O,
0, 640, 512)
'We calculate
the new window size
in twips
because
'screen
coordinates
are in twips.
Li veImage . ScaleMode
1
x = VScrol11.Left
+ VScrol11.Width
y = HScrol11.Top
+ HScroll1.Height
'account
for
the window border
size
x = x + (Livelmage.Width
- LiveImage.ScaleWidth)
y = y + (Livelmage.Height
- Livelmage.ScaleHeight)
Livelmage.Width
= x
Livelmage.Height
= y
=
Li velmage
gndSub
. Timer!.
Int~l
. 10
?rivate
Sub Fo~paint()
Call displayit
~d Sub
-ate
Call
Sub HScrolll_Change
displayit
()
Sub
?rivate
Sub Timerl_Timer()
counter
= counter + 1
tmp
If
= Grab(fgh,
frh,
(tmp = 0) Then
Debug.print
8Grab
End If
Call
Cnd Sub
displayit
~rivate
Sub VScrolll_Change(
Call
displayit
Cnd Sub
0)
failed8
:ontroller
Tivate
Call
~Sub
- 1
Sub Commandl_Click
Commands. GetImage
'rivate
()
Sub Form..-Load()
If
(InitLibrary()
Debug.Print
= 0) Then
"init
fail"
End
End If
=
fgh
If
(fgh
AllocateFG(-l)
= 0) Then
ExitLibrary
Debug.Print
"frame
grabber
fail"
End
End If
frh
If
= AllocateBuffer(640,
(frh = 0) Then
FreeFG
(fgh)
ExitLibrary
Debug.Print
End
End If
480,
"buffer
8}
fail"
tmp = SetImageSize(fgh,
640,
If
(tmp = 0) Then
Debug.Print
"SetImageSize
256,
0,
.
failed"
End If
LiveImage.Show
d Sub
-
ate Sub Form_Unload(Cancel.As
LiveImage.Timerl.Interval
Unload
Li veImage
Integer)
=
0
FreeFrame
(frh)
FreeFG (fgh)
ExitLibrary
ld Sub
'rivate
tmp
Sub
grange_Click(Index
As
= SetGainRange(fgh,
Integer)
Index,
0)
!'1d Sub
rivate
tmp
Sub gslide_Change
()
= SetFineGain(fgh,
gslide.Value,
0)
nd Sub
rivate
Sub HScrolll_Change()
Call
displayit
nd Sub
rivate
Sub Labe14
Click
ndSub
rivate
tmp
Sub offslide_Change()
= SetOffset(fgh,
offslide.Value
~
'ivate
Sub Open_Click()
stop_click
CMDialogl.FileName
= .11
CMDialogl.Action
= 1
If (CMDialogl.FileName
<> ..
Then
")
V
640
.80,
SI
_troller
- ~
Screen.MousePointer
= 11
If ReadBMP(frh,
CMDialog1.FileName)
Screen.MousePointer
= 0
MsgBox .Could
Not Read File.,
End I f
(-""-\
Screen.Mousepointer
=
0
End If
LiveImage.Refresh
:nd Sub
~lic
Sub play_Click()
Li veImage
.
Timerl
.
Interval
= 0
= Timer
=
10
2
0
counter
tl
'rivate
Sub stop_click()
~ivelmage.Timerl.Interval
iSub
'rivate
Sub cmdQuit_Click()
LiveImage.Timerl.Interval
Unload
Li veImage
Unload
Controller
Load Commands
Commands. Visible
= True
Commands. WindowState
= 0
FreeFrame (frh)
FreeFG (fgh)
ExitLibrary
:nd Sub
= 0
Then
48,
.Error
"
t
>ption
Explicit
~ining
global
variable
of the
form
)rivate
mintResultNumber
As Integer
)rivate
counter_x
As Integer
>im loop_counter
As Integer
)rivate
flag
As Integer
~ivate
Call
Sub Commandl_Click()
Get Image
md Sub
Sub cn¥iLoa~Click()
'rivate
Loads a saved bi tmap image and sets to the edi table image screen
When clicked,
a file
must be selected
or an error
occurs.
A if statement
but we consider
this not the most important
issue right
now so disregard
Commands.CommonDialogl.DialogTitle
Commands .CommonDialogl.Filter
Commands .CommonDialogl.FileName
= "File
= "* .bmp"
= "* .bmp"
can be used
for now
Open"
Commands.CommonDialogl.ShoWOpen
load
the
image
information
Commands.edshpTrain.Load
Commands.edshpInspection.Load
tapew
~ommands.FeatureFindTool.Load
~,
from
the
FeatureFindSample.
INI
file
"h:\SeniorProject\LastYear\FeatureFindSample.INI",
"h:\SeniorProject\LastYear\FeatureFindSample.INIw,
.
" TrainingShape
"
wInspectionS
"h:\SeniorProject\LastYear\FeatureFindSample.INI.,
"Featurefind
Commands.FeatureFindTool.Refresh
~d
Sub
Irivate
Sub cmdMOVE_Click()
, Moves
allow
, user
robot
a list
MSCoxmn1.OUtput
Call
Move1(380,
to
one
location
of
coordinate
right
now for
choices
= -00 SPEED SO' +
170, -120, 0)
or
allow
testing
user
purposes.
to
input
Need
to
be incorporated
later
location
~Lf
:nd Sub
'rivate
~til
Sub cmdPICK_Click()
pick(True)
:nd Sub
'rivate
Sub cBKiSave_ClickO
'Saves
the
current
trained
image
,to
a file
Filename
Commands.CommonDialog2.DialogTitle
= "File
Save"
Commands.CommonDialog2.Filter
= "*.Dat"
Commands. CommonDialog2.
FileName
= "image1. Dat"
Commands. CommonDialog2
. Action
= 2
If
(Commands.CommonDialog2.FileName
Screen.MousePointer
= 11
<> "")
Then
"imagel.Dat"
is
used
at
the
default
name
:ommands
If
WriteBMP(frh,
Commands.CommonDialog2.FileNarne,
Screen.MousePointer
= 0
MsgBox 8Could Not Write File8,
48, 8Error8
End If
\
Screen.MousePointer
= 0
End If
image and feature
'saves
find
information
= Commands. CommonDialog2 . FileName
.h: \SeniorProject\LastYear\FeatureFindSample.
INI.,
.h:\SeniorProject\LastYear\FeatureFindSample.INI.,
Commands. FeatureFindTool.
Commands .edshpTrain.
save
Commands.edshpInspection.save
lape.
1) Then
FeatureFileName
Commands.FeatureFindTool.save
.TrainingShape.
.InspectionS
.h:\SeniorProject\LastYear\FeatureFindSample.rNI.,
.Featurefind
~ool.
'ivate
Sub coJmlandUse_Click
, Compares the
()
features
of
Commands.FeatureFindTool.Use
Commands. FeatureFindTool.
Commands. CalXValue.
Text
!rivate
~'
the
trained
image with
the
image being
displayed
Found
Sub commandTrain_Click()
Trains
the
image
in
the
train
Commands.FeatureFindTool.Train
Commands.commandUse. Enabled
shape
box
Rectangular
blue
shaped
on the
= True
= True
Commands. edshplnspection.
Visible
Commands.FeatureFindTool.Refresh
1d Sub
'rivate
Sub disp_Click(Index
the
Displays
live
As Integer)
image on the Li veimage
Commands. WindowState
Controller.
Show
Livelmage.Show
=
window.
1
nd Sub
Sub EdibleImage_Paint
'Controls
what
to
display
()
on the
'Commands.Ediblermage.picture
If
i
= Commands. txtMinScore
MinimumScore
= Commands. FeatureFindTool.
nd
hold to drag shape
rivate
on the editable
(flag
= 1)
image
= -h: \SeniorProject\LastYear\abc.bmp-
(Commands.CommonDialogl.FileName
Commands. EdibleImage.
picture
ElseIf
edible
= "")
Then
= "h: \Seniorproj
ect \LastYear\abc.
Then
Commands. EdibleImage. picture
Commands.EdibleImage.Refreah
flag = 0
= -h:\SeniorProject\LastYear\abc.bmp-
bmp.
editable
image.
Cli
~~nds
-
3
Else
= "h:\SeniorProject\LastYear\abc.bmp= Commands. CommonDialogl. FileName
Commands.EdibleImage.Picture
Commands. EdibleImage.
~d
picture
If
Sub
)rivate
Sub FeatureFindTool_Use
When features
desired
are
found
on the
edible
Xl Commands.FeatureFindTool.NwnberOfResults
Else
this
controls
what
is
displayed
0 Then
=1
mintResultNumber
image
DisplayResultlnfo
mintResultNwnber
DisplayResultInfo
End If
= 0
Sub
'rivate
Sub ForIrLLoad
Loads the
form,
initializes
Dim CommPort As String,
Dim counter~
As Integer
, intializes
counter.-X
counter
~lag
these
=
=
and sets
Handshaking
parameter
As String,
before
Settings
anything
As String
variables
glObal
0
0
to
be specified
for
featurefindtool
to
=
Commands.FeatureFindTool.hInspectionShape
Commands. FeatureFindTool.
work
= EdibleImage
Commands.FeatureFindTool.hInspectionImage
edshpInspection
FeatureFindTool.
= Commands.
hTrainingImage
= edshpTrain
Commands.FeatureFindTool.hTrainingShape
, image shown when program start
at beginning
Commands. EdibleImage. picture
= Rh: \SeniorProj
ect \LastYear\abc.
Commands.edshpTrain.Load
Rh:\SeniorProject\LastYear\abc.INI",
Commands.edshpInspection.Load
"h:\SeniorProject\LastYear\abc.INIw,
Commands.FeatureFindTool.Load
"h:\SeniorProject\LastYear\abc.INIw,
Commands.FeatureFindTool.Refresh
, to show when program is running
Commands.edshpTrain.Visible
= True
Commands.edshplnspection.Visible
= True
Commands.commandUseEnabled
True
Commands. commandTrain. Enabled = True
=
.
, initial
value
used,
Commands.txtMinScore
serial
port
settings
can be changed
= "75"
I
very
~hen
program
important
=1
CoImnPort
Settings
= "9600--H,8,1"
COM1.
MSComml
. CommPort = CommPort
9600 baud, no parity,
8 data,
MSComml.Settings
= Settings
I
done
= 0
, need
\ Use
are
Handshaking
MSComml
.
Handshakinq
= comRTS
and 1 stop
b~t
is
running
hInspectionImage
bmpR
RTrainingShapeR
wInspectionShape"
RFeaturefindTool"
:ommands- 4
, Open Port
If
=
MSComml. PortOpen
MSComml. PortOpen
If
~d
~rivate
False
= True
Then
Sub DisplaYResult~nf~J)
'Displays
the
results
of
If mintResultNumber
when using
the
"Use"
button
to
the
screen
= 0 Then
Commands.XValue.Text
Commands. YValue. Text
= ""
= ""
Resul tLabel.
Enabled
= False
Commands. FrameCoordinates
. Enabled
=
Commands.
Else
False
Commands. Resul tLabel. Enabled = True
Commands. FrameCoordinates
. Enabled
= True
Commands.XValue.
Commands. YValue.
'Point
at
the
= Commands. FeatureFindTool.
Text
Text
=
origin
Resul tX (mintResul
tNumber)
(mintResultNumber)
Commands. FeatureFindTool.ResultY
of
the
area
where
the
feature
was
found
when
the
invoked
Commands.Textl
= Commands
.FeatureFindTool.ResultPoint
If
~ub
?rivate
Sub ~_Click(Index
OUtput
calibration
MSComml.Output
MSComml.Output
Call
delay(2)
?rivate
As Integer)
connnand HOME Calibrates
robot.
= "HOME"
= vbCrLf
Sub Exit_Click(Index
Close
the
As Integer)
Port
If
MSComml.Portapen <> False
MSComm1. PortOpen = False
End If
, Exi t Program
End
;ub Movel (x As Double,
Then
y As DOuble,
z As DOuble
bimbuffer
As String
Dim destination
As String
'manually
move arm for
Dim T(l
To 4) As String
T(l)
= CStr(x)
T(2)
= CStr(y)
given
destination
R As Doubl.)
(mintResultNumber)
Use method
was la8~
T())
T{.r
a
CStr(z)
= CStr(R)
'Define
point
~estination
= T(l)
buffer
= "DO Tl
MSCo~
.Output
+
-
+ T(2)
-
+
-
-
...
~()).
+ .
. + T(4)
= - + destination
= buffer
+ vbCrLf
Call
delay(7)
MSComml.Output
= -DO MOVE Tl"
+ vbCrLf
Sub
~
delay(c
As Integer)
'Delay
for
specified
= 1 Toc'
For counter
Next counter
Used quite
times
often
to make sure robot and vision
can be worked tog.
1000000
md Sub
SUb pick
(y
As
To pick
Boolean)
object
function
Dim
Dim
~im
bim
Dim
Dim
Dim
Dim
Dim
if
found,
or increment
to scan workspace
screen_x
screen-y
darl~
=
area
if
not
found
Loop
is
under
the RunProg (
of robot.
As Double
As Double
As Integer
darl-y
As Integer
A As String
move~
As Integer
B As String
move_x2 As Integer
ndarl_x
As Integer
'clear robot memory bank
MSComml.Output = "DO CLEARCall delay(5)
y
to next
" v~Lf
Comrnands.FeatureFindTool.Found
Jf Y
= True
Then
'get
pixel
screen_x
=
screen-y
darl-y
darl_x
ndarl_x
=
location
Commands.FeatureFindTool.ResultX(mintResultNumber)
Commands.
FeatureFindTool.
= Clnt«64.516
- (screen_x
= Clnt«scre~
/ -6.124)
= darl_x
+ counter-x
Commands.txtWorldX.Text
Commands. txtWor IdY Text
.
'set
Resul
darl
command into
A = -DO Tl = " & ndarl_x
/ 6.124)
+ 387)
tY (mintResul
) 'convert
pixel
location
to real cooridate
'convert
pixel
location
to real cooridate
= ndarl_x
= dar l-y
string
& -.
.
Ic
darl~~ .
,
4"'"
...~~~
Commands. cmdA. Text
I
set
MSCo~
Call
robot
u A
movement speed
= .DO SPEED 300.
.Output
delay(l)
COImnands. cmdA. Text
= A
tNumber)
& vbCrLf
0
6
Call
delay(l)
MSComm1.0utput
MSCoJXln1.0utput
Call
delay(S)
'open end-effector
MSComm1.OUtput
Call
delay(40)
'move to found
MSComml.OUtput
=
A
=
8DO
= vbCrLf
OUTPUT +
OG68
vbCrLf
&
object
= 8DO MOVE T18 & vbCrLf
Call
delay(40)
'end-effector
go down
MSComm1Ou tpu t = 8DO OUTPUT + OG7
.
8
. vbCrLf
Call
delay(40)
'close
end-effector
MSCoJXlnl.Output = 8DOOUTPUT - OG68 & vbCrLf
Call
delay(40)
'end-effector
go up
MSComm1.OUtput
= 8DO OUTPUT - OG78 & vbCrLf
Call
delay(40)
'set
the destination
that
want to drop the object
MSComm1.OUtput
= 8DO T3 = -17. 473. -120. 0.8 & vbCrLf
Call
delay(S)
'go to the destination
that
want to drop the object
MSComm1.OUtput = 8DO MOVE T38 & vbCrLf
Call
delay(40)
'drop
object
MSComm1.OUtput 8DO OUTPUT + 0068 & vbCrLf
Call
delay(40}
=
, example
for last
'MSCoImnl.OUtput
'Call
delay(S)
'MSCoImnl.OUtput
'Call
delay(40)
'MSCoImnl.Output
'Call
delay(S)
'MSCoImnl.Output
'Call
delay(40)
'MSCoImnl.Output
'Call
delay(40)
counter_x
= 0
demo
=
800
=
800 MOVE T48 & vbCrLf
T4
= 369.
34.
= 800 TS = 369.34.
-91.
-96.
0.81&
0.-
= 800 MOVE TS8 & vbCrLf
= 800 OUTPUT + OG68 & v~Lf
Else
'keep
increment
until
find a object
counter_x
= counter_x
+ 10
MSCo~.OUtput
= 8DO OUTPUT - OG78 & vbCrLf
Call
delay(40)
Commands. Text 1 =
move-x
= 300
move-x2
= move_x
B = 800 T10= 8 &
MSCo~
. OUtput
=
MSCOImnl.OUtput
=
Call
delay(5)
=
MSCOImnl.OUtput
Call
counter~
+ counter-x
move_x2 & 8.
B
vbCrLf
8DO MOVE T108
O. O. 0.8
&
vbCrLf
delay(5)
End If
Call
delay(15)
End Sub
~ic
Sub Get Image ( )
Not used
Dim tmp As In~er
tmp
Call
= Grab(fgh,
WriteBMP(frh,
frh,
0)
.c:\ee175AB\temp.bmp.,
1
vbCrLf
& vbCrLf
:oIm1lands
End Sub
trivate
SUb RunProg_Click(Index
Automation
Dim temp
, loop
of
the
As Integer)
vision
system,
utilizes
the
pick
function
As Int898:r
until
object
is
found
Do
, setting
live
image
to
abc.bmp
Call
Controller.play_Click
LiveImage.Timer1.Interval
0
temp
= Grab(fgh,
frh,
0)
Call
WriteBMP(frh,
8h:\SeniorProject\LastYear\abc.bmp8,
1)
CoImlands.EdibleImage.Picture
8h:\SeniorProject\LastYear\abc.bmp"
=
=
, saves abc.bmp
info
to abc.ini
file
Commands.FeatureFindTool.FeatureFileName
= wh:\SeniorProject\LastYear\abc.DatW
Commands.edshpTrain.save
wh:\SeniorProject\LastYear\abc.INlw,
wTrainingShapeW
Commands.edshplnspection.save
wh:\SeniorProject\LastYear\abc.INlw,
wlnspectionShapew
Commands.FeatureFindTool.save
wh:\SeniorProject\LastYear\abc.INlw,
wFeaturefindToolw
'load to be displayed
and use
Commands.edshpTrain.Load
wh:\SeniorProject\LastYear\abc.INIw,
Commands.edshpInspection.Load
wh:\SeniorProject\LastYear\abc.INIw,
Commands.FeatureFindTool.Load
wh:\SeniorProject\LastYear\abc.INIw,
wTrainingShapeW
wInspectionShapew
wFeaturefindToolw
Commands.FeatureFindTool.Refresh
Commands.EdibleImage.Refresh
Controller.Refresh
LiveImage.Refresh
, check
Call
Call
Call
if
trained
image
, setting
flag
= 1
Commands.
the
edible
=
=
found
by calling
the
use
function
Text
to
=
after
=
= 0
loop
counter
+ 1
loop_counter
(Commands. FeatureFindTool.
, reseting
variable
counter_x
= 0
loop_counter
0
Commands. WindowState
abc.bmp,
1
loop_counter
Commands. Cal YValue.
While
image
WindowState
loop_counter
Loop
is
coImnandUse_Click
pick(Commands.FeatureFindTool.Found)
delay(20)
loop
Found
= False
And
loop_counter
< 1~
Appendix D: Technical Specifications
KP-M2U Svecification(EIA)
. Sensorpick up device: 1/2" (KP-M2) Interline transferCCD
1/3" (KP-M3) interline transferCCD
Sensingscanning area: 6.45 (H) x 4.84 (V) mm (KP-M2)
4.88 (H) x 3.09 (V) mm (KP-M3)
Total number of pixels: 811 (H) x 508 (V)
Number of effective pixels: 768 (H) x 494 (V)
Pixel pitch: 8.4 (H) x 9.8 (V) ~m (KP-M2)
6.35 (H) x 7.4 (V) ~m (KP-M3)
m
.
u'
.
~,,-~--~'.'.
M
.~
.
~~
t,
0
Spectral sensitivity:
J
-~..
L
-
Scanning system: 2: I interlaced / 525 lines /60 fields per second / 30 frames per
second or non-interlaced (only in external sync mode or with modification)
Scanning frequency: 15.734kHz (H), 59.94Hz(V)
Signal standard: EIA Monochrome
Sync system: Internal or external (automatic switching)
External sync input: HV ND 2 to 6 volts p-p input impedance1kohm, frequency
deviation:t:l%, negativepolarity
Resolution: 570 (H), 485 (V) TV lines
Standard sensitivity: 400 lux @ f4 (3200K)
Minimum sensitivity: 0.5 lux at fl.4 (with AGC on, gamma0.45, without IR cut
filter)
Electronic Shutter: off, 1/100th,1/125th,1/25Oth,1/500th,l/l,OOOth,1/2,OOOth,
1/4,OOOth,
1/10,OOOth
(selectableby externalswitch)
Gamma correction: 0.45 or 1.0 (selectableby internal switch)
Signal to noise ratio: 56dB
AGC: Normal or AGC (selectableby internal switch)
33
Video output: VS 1.0 volt p-p 75 ohms unbalanced. (0.7 volts p-p video and 0.3
volts p-p sync negative polarity)
Integration mode: Field or frame integration (selectable by external switch)
Field on demand function: Switchable on/off by internal switch
Restart reset operation: On/Off selectable by component change
.
.
Lens mount: C
Flange focal distance: 7.526 mrn
Ambient temperature and humidity:
Operating:-100C to +60°C,RH 90% or less
Storage:-200C to +6OoC,RH 70% or Jess
Resistanceto vibration: 9G max (10 to 60Hz amplitudeconstantat 0.98mm)
7G constant(60 to 150Hzamplitudevariable), 10 to 150Hz(sweepingfor one
minute, eachof X, Y andZ directionsfor 30 minutes)
Dimensions: 44 (W) x 29 (H) x 72 (D) mm
Weight: 120grams(approx)
Supply voltage: 12 volts dc:tl volt
Current consumption: 180mA (approx)
Composition: Camera head (with IR cut filter), C mount cap, operation manual
Seiko Robot RS-232serialcablepin-outs
PC
Seiko Controller
25 Pin (M)
9 Pin (F)
2
3~~
3
2
5
~-7
34
References
[1] DARLfour ProgrammingGuide. Seiko Instruments,Torrance,CA 1987
[2] DARL Talk. Version 2.02A, Seiko Instruments,Torrance,CA 1995.
[3] "Imaging Components:VisionBlox ImagingSoftware,"Vision 1,
h~:llwww.visionl.com/software/vbloxdesc.shtml (currentJune7,2001).
[4] "KPM-2 Camera,"PremierElectronics,httR://www.oremierelect.co.uk/kRm2.html
(currentJune7,2001).
[5] Seiko RT3200Installationand OperationManual.
Torrance,CA 1987.
ed., Seiko Instruments,
[6] VisionBlox Training Manual.Version 3.0, IntegralVision Inc., FarmingtonHills, MI
1998.
[7] VisionBlox ReferenceManual. Version 3.0, IntegralVision Inc., FarmingtonHills,
MI 1998.
[8] G. Perry,TeachYourself Visual Basic 5 in 24 Hours. 1sl ed., Indianapolis,Indiana
SamsPublishing, 1997.
Addison[9] J.J. Craig, Introduction to Robotics. 2nded., Reading,Massachusetts:
Wesley Publishing Company, Inc., 1989.
[10] H.M. Deitel, P.J.Deitel, andT.R. Nieto, Visual Basic6 How to Program.New
Jersey:PrenticeHall, 1999.
[11] C. Bertell, H. Nguyen,and K. Wassink,Final Reportof SeniorDesignProject
Winter/Spring2001,2001.
36
Acknowledgement
We would like to thank Dan Giles for the all the help and guidancehe hasassisted
us with all throughout. We also like to thank Dr. GerardoBern for keepingus on track
with our report by makingus sendhim weekly reports. Jojo, thanksfor helping us
preparefor the presentation,it really helpedus from getting flusteredwhen we presented
in front of everyone. Steve,thanksfor lending us the Visual Basic book. Also, thanksto
Josephfor providing the us with the video cameraso we can tapeour demonstrationand
being our cameramantoo.
37