Transcript
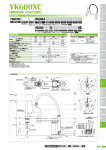
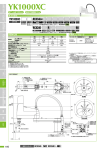
LCM100 リニアコンベアモジュール ● アーム長 800mm ● 最大可搬質量 18kg 注文型式 YK800XGP ロボット本体 ー ー F ー ー RCX340-4 小型単軸ロボット TRANSERVO 適用コントローラ / 制御軸数 ー Z軸ストローク ー ツールフランジ ー ケーブル長 200:200mm F:あり 3L:3.5m 400:400mm 5L:5m 10L:10m ー ー ー ー ー ー ー 安全 ー オプションA ー オプションB ー オプションC ー オプションD ー オプションE ー アブソ 規格 (OP.A) バッテリ (OP.B) (OP.E) (OP.C) (OP.D) コントローラ各種設定項目をご指定ください。RCX340▶ RCX240 ー 適用コントローラ ー ー R3 ー ー P.502 ー ー コントローラ各種設定項目をご指定ください。RCX240/RCX240S ▶ 回転範囲(°) Z軸 200 ハーモニックドライブ ハーモニックドライブ 伝達方式 モータ ∼ 減速機 コントローラ 電源容量(VA) 運転方法 ̶ RCX340 RCX240-R3 ̶ ±360 400 200 ボールネジ ハーモニックドライブ ±0.01 ±0.004 プログラム ポイントトレース リモートコマンド オンライン命令 2500 直結 減速機 ∼ 出力 直結 1 繰り返し位置決め精度※( (R:°) XYZ:mm) ±0.02 最高速度(XYZ:m/sec) (R:°/sec) 9.2 2.3 1.7 920 18 0.58 1 .0 IP65(IEC60529)相当 0.2×20 φ6×3 1.ソフトリミット 2.メカストッパ(X,Y,Z軸) 標準:3.5 オプション:5,10 Z軸200mm:56 Z軸400mm:58 標準サイクルタイム:2kg 可搬時(sec)※2 2 R軸許容慣性モーメント (kgm ) 保護等級※4 ユーザ配線(sq×本) 動作リミット設定 ロボットケーブル長 (m) 本体質量(kg) ※ 可動範囲は、X, Y軸のメカストッパの位置をずらすことで制限する ことができます。 (出荷時は最大可動範囲) 詳細は取扱説明書(設置マニュアル)をご参照ください。 ※ 精度良く基準座標を設定するには、基準座標設定治具(オプション) を使用して行ないます。詳細は取扱説明書(設置マニュアル)をご参照 ください。 取扱説明書(設置マニュアル)は弊社WEBサイトより ダウンロードしていただけます。 http://www.yamaha-motor.co.jp/robot/ YK800XGP ° 130 120 99 99 220 ° 5 R26 201 R265及び寸法98と400の角の内側領域をまたぐ動作を行うと、 Z軸先端フランジがベースに、またはアームがマシンハーネスに 175(アーム旋回時最大300) 当たりますので動作させないでください。 ストローク仕様 568 476 小型/中型 0 Z軸下降端メカストッパ位置 ユーザ配管を使用しない場合は 付属の埋栓をしてください。 25 40 大型 400 60°6° 3 6 0 D.7 P.C.D .36 防塵・防滴 6-M5x0.8 深さ 11 10-M5x0.8 深さ 11 ※各M5タップ位置はR軸原点との位相関係なし Z軸先端形状 適用コントローラ 98 119° 当たりますので動作させないでください。 0 φ25 H7 +0.021 0 φ90 h7 -0.035 . P.C 壁取付け・ インバース 4-φ11 158 R265及び寸法98と400の角の内側領域をまたぐ動作を行うと、 Z軸先端フランジがベースに、またはアームがマシンハーネスに 十分なスペースを確保してください。 R32(ケーブル最小曲げ半径) ケーブルは可動させないでください。 5 M4アース端子 ユーザ配管1 (φ6黒) ユーザ配管2 (φ6赤) ユーザ配管3 (φ6青) 128 119 80 60 40 0 R205 R26 86 101 φ38(排気用配管) ホースを繋ぎ、水・塵のかからない 35 位置まで伸ばしてください。 X軸関節エアーパージ用(φ6) Y軸関節エアーパージ用(φ6) 0 R400 φ90 h7 339.5 254.5 219 R80 ° 99 ユーザ配線用コネクタ (1∼20番使用可能、 ケーブルクランプサイズ:φ16∼φ18) 使用しない場合は 付属のキャップをかぶせてください。 130 全方位/ タイニー 440 368 324 Z軸原点復帰時 各種情報 (アーム旋回時最大高さ920) 28 ベース背面にはメンテナンス上の 386 158 左手系動作範囲 ストローク仕様 0 ° 813 Z200mm 800 188.7±2 98 119 R400 400 400 取付けM12ボルト4本使用 16 (ベース寸法) 90 400 63 128 Z400mm 1000 4-φ14 50 145 75 260 R205 00 コントローラ CONTROLLER INFORMATION 注:ユーザ配管を ユーザ配管1 (φ6黒) 使用しない場合は ユーザ配管2 (φ6赤) 付属の埋栓をして ユーザ配管3 (φ6青) ください。 0 R80 130 161 275 R4 クリーン CLEAN ユーザ配線用コネクタ (1∼20番使用可能、 ケーブルクランプサイズ:φ16∼φ18) 使用しない場合は 付属のキャップをかぶせてください。 12 12 6mm上昇 YP-X ピック&プレイス 周囲温度一定時の値です(X、Y軸)。 上下移動25mm、水平移動300mmの往復動作時(2kg可搬、粗位置決めアーチモーション)。 加速度係数の設定に制限があります。P.533をご参照ください。 ジャバラ部へ直接噴流がかかる使用は行わないでください。水以外に対する防滴性に関しては弊社までお問い合わせください。 400 Z軸ストローク 20 200 Z軸ストローク YK-XG スカラロボット ユーザ配管(外径) ※ ハーモニックドライブは株式会社ハーモニック・ドライブ・システムズ の登録商標です。 ° XY-X 直交ロボット 最大可搬質量(kg) ※3 R軸 400 130 PHASER リニア単軸ロボット 減速機 Y軸 400 ±150 400 20 FLIP-X 単軸ロボット X軸 400 ±130 750 モータ出力 AC(W) ※1. ※2. ※3. ※4. P.489 ■ 適用コントローラ アーム長(mm) 減速機構 BB ー CE対応 ー 回生装置 ー 拡張I/O ー ネットワークオプション ー iVYシステム ー グリッパ ー バッテリ ■ 基本仕様 軸仕様 ー 00 アプリケーション 防塵・防滴仕様 R4 APPLICATION YK800XGP RCX340 u 502 RCX240 u 489 右手系動作範囲 上記動作範囲でベースフランジ部、ロボットケーブル、スプライン、 ジャバラが干渉する位置は使用できませんのでご注意ください。 ・X軸メカストッパ位置:132° ・Y軸メカストッパ位置:152°